
Abstract
Short-term disruptions can have a long-lasting negative effect on traffic flow exceeding the duration of the disruption itself. This is especially the case when traffic demand approaches the network’s capacity. On-demand ride-sourcing services like ride-hailing and ride-pooling do not only have an impact on the overall kilometers driven in a network, but also conduct frequent stopping maneuvers to let passengers board and alight. As further growth of such services is expected, municipalities will need to find ways to organize and, if needed, regulate such activities. This paper proposes, evaluates, and discusses two possible methods that can be part of a holistic strategy to mitigate the impacts of frequent mobility-on-demand curbside stops in an urban environment. The first method adapts the positions of stops at an intersection according to real-time signal timings without adding another variable to the already quite complex traffic signal optimization. The second method discusses a temporary reduction of the number of allowed stopping maneuvers on saturated street sections or in other sensitive areas. Both methods are evaluated using microscopic traffic simulation and result in significant reductions of average vehicle delay as well as standard deviation thereof in all investigated traffic demand scenarios. These results indicate that the proposed methods can help to preserve a stable traffic state in situations close to the capacity limit, which is to the benefit of all stakeholders involved.
Keywords
Market shares of transportation network companies (TNCs) like Uber or Lyft have grown considerably in the past and are expected to continue their growth, especially when autonomous driving enables large fleets of autonomous ride-hailing vehicles. This, in combination with the increase in population density in urban areas, will lead to a considerable number of pick-up and drop-off (PUDO) events of ride-sourcing services, called mobility-on-demand (MoD) services in the remainder of this paper. Such services can either serve single passengers (ride-hailing) or a group of passengers with compatible origins and destinations (ride-pooling). A straightforward solution to the problem of emerging traffic flow disruptions resulting from frequent PUDO events is the designation of dedicated passenger loading zones. However, this may not be possible in a sufficient manner at all locations at all times. In particular, (historic) city centers face a high competition for curb space and lack sufficient space for a generous allocation. Additionally, citizens and TNCs may lobby for flexible PUDO locations for the sake of passenger comfort. This may lead to a situation where a significant number of PUDO events are carried out while double-parking. Such short-term disruptions of traffic flow cause problems, especially in saturated urban street networks, as double-parking is known to decrease capacity, leading to increased travel times and negative external effects (1–3). A significant number of these disturbances amplify the already existing negative impact of today’s MoD services on urban traffic flow ( 4 , 5 ). Even if the total number of vehicles on the road may be reduced at some point in the future by more optimized and pooled MoD services, cities may decide to reallocate urban space to other uses than excessive road infrastructure. This might most probably lead to a situation where road capacity will be a scarce resource in any future scenario. Therefore, this study aims to minimize short-term disruptions of traffic flow by introducing two possible methods that can become part of holistic municipal MoD management, to the benefit of all stakeholders involved. The first method focuses on the intersection level, while the second embodies a broader network perspective. Both methods aim to only add a minimum of additional complexity to the often already very complex control of urban transportation systems. Although both methods can be applied in parallel, they are introduced and discussed separately in the remainder of this paper. For each method, a relevant scenario is introduced to elaborate on the relevance of the developments, followed by the method’s development and a discussion of the results of a microscopic traffic simulation. In the end, a combined conclusion is drawn.
Background
Road capacity and curb space will always be scarce resources in dense urban environments, even if MoD services reduce the total number of vehicles on the road. Recent studies show that additional kilometers traveled by MoD vehicles can overcompensate the reduced kilometers of private vehicles. This is caused by a modal shift away from public transport and additionally induced demand ( 3 , 6 ). The resulting reduction in average speeds within the network is caused not only by more kilometers being traveled but also by an increased number of short-term disruptions caused by PUDO stops ( 4 , 5 ).
Recent research ( 1 ) investigated the impact of rule-violating double-parking and found significant impacts on speed and delay with up to 44% faster travel speeds when double-parking is omitted completely. Another study ( 7 ) found that even parking maneuvers that are carried out legally may cause temporary bottlenecks because of the maneuvering needed. This is especially relevant for angled parking spaces and parallel parking, which are maneuvers frequently conducted by MoD vehicles in case they have to leave a crowded passenger loading zone or another short-term stop position (e.g., a driveway). Such maneuvers may be even more time consuming for autonomous vehicles as they are usually assumed to behave more cautiously. Next to efficiency losses and increased emissions, traffic safety is negatively affected by frequent stops as well ( 8 ).
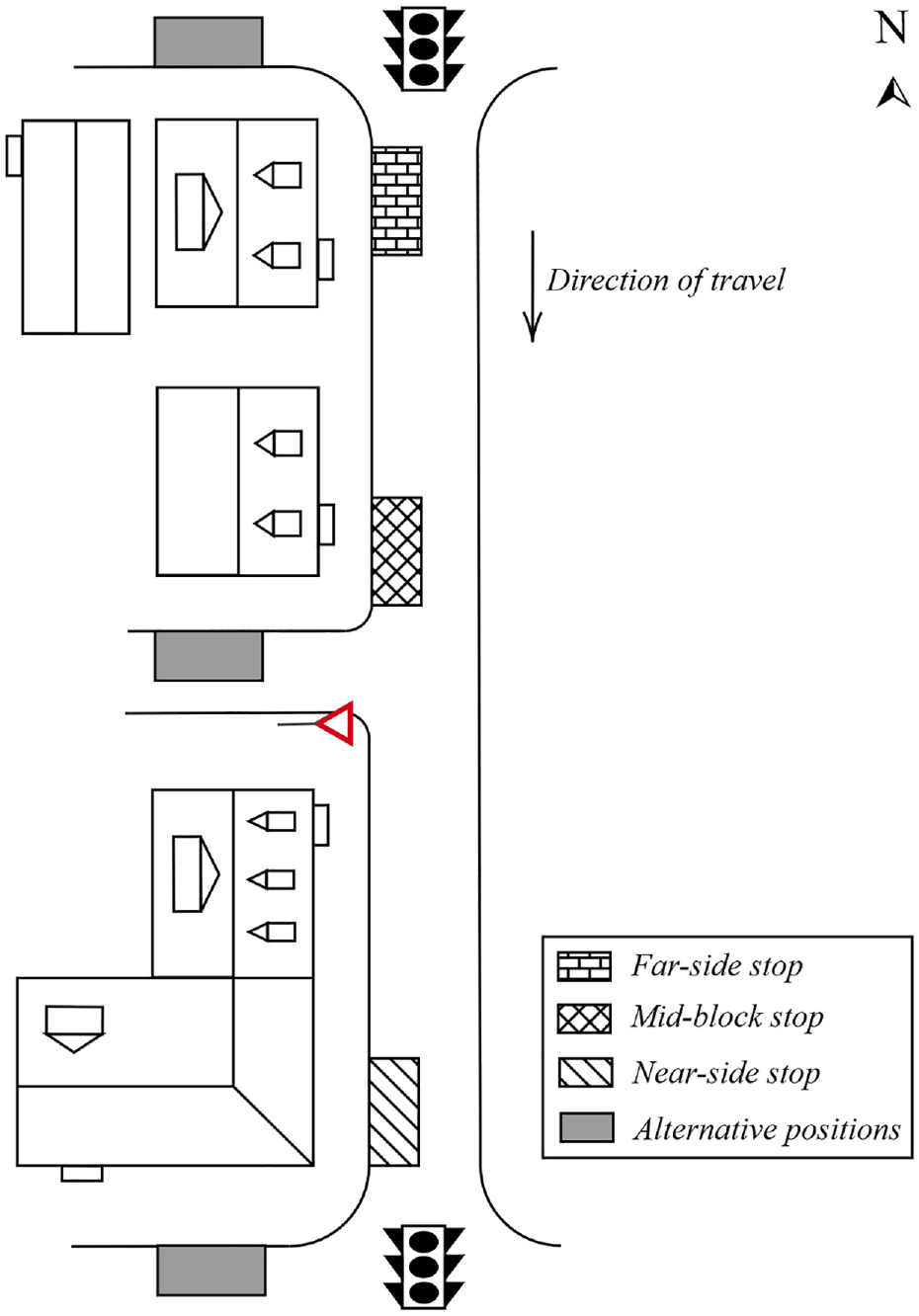
Another influencing factor of parking maneuvers is the location where the disruptions are taking place. Figure 1 gives an overview of possible on-street PUDO locations. Studies found that mid-block stops of delivery traffic have the least impact on intersection capacity (9–11). This is in line with study ( 12 ), which identified the following relationship: The greater the distance to the intersection, the lower the capacity reduction caused. Study ( 11 ) found that double-parking of urban delivery vehicles strongly affects traffic flow under nearly saturated traffic conditions.
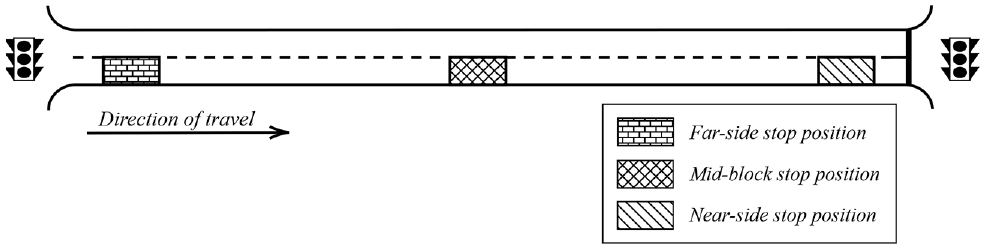
Possible on-street stop positions in an urban environment.
A first pragmatic solution to these problems would be to limit the TNC’s fleet sizes, although this might lead to a reduced mobility of travelers within a city ( 13 ). Other solutions could be to use route-optimized locations of PUDO events ( 14 ) or to encourage ridesharing services which can reduce overall vehicle kilometers traveled ( 15 ). Besides these ideas, research on how to improve today’s mostly static curb management has been conducted. As with double-parking, relevant studies have been carried out both for MoD services and for delivery traffic. Study ( 9 ) designed dynamic delivery parking spots that bundle delivery stops in a mid-block position when traffic demand does not exceed capacity of the remaining lanes plus the storage capacity of all lanes upstream of the bottleneck. Another study investigated two possible strategies with a focus on MoD stops ( 16 ): a general provision of passenger loading zones as well as a geofencing approach that forces drivers to actually use the designated PUDO locations. Results of a real-life test area showed no significant effect on travel speeds because the chosen study area had numerous other disturbances. Yu and Bayram ( 17 ) found that dynamic curb allocation policies using flexible zones that adapt to the alternating demands of different stakeholders over the day did reduce vehicle delay and distance driven in a macroscopic simulation model. Another trend that may influence vehicular traffic in general is that more and more cities aim at minimizing the needed street infrastructure with the goal of increasing livability of their city centers ( 18 , 19 ). Study ( 20 ) identified 15 stakeholders that compete for the scarce curb space. Based on this, the authors further argued for the need for holistic municipal curb management to maximize wider public goals. MoD services may be a challenging stakeholder, as their usage cannot be simply shifted off-peak as can be done with delivery traffic.
To mitigate influences of near- and far-side stopping at intersections, adaptation of traffic signal timings for both delivery vehicles ( 10 ) and public transport ( 21 ) have been developed. These approaches showed positive effects in respect of their aims of reducing the impact on the impeded traffic flow or reducing public transport travel times, although leading to additional delays for conflicting directions. Even though an optimized traffic signal timing can successfully adapt to changing traffic conditions and nonrecurring events, the effectiveness decreases when approaching a saturated traffic state ( 22 ). To mitigate impacts of upstream bus stops on traffic flow, Gu et al. ( 23 ) proposed reducing green time and cycle time when the stop cannot be placed upstream of the fully expanded queue in front of the traffic signal.
The already described influences on traffic efficiency can also have an impact on the urban transportation network design problem (UTNDP). The UTNDP usually comprises the road network design problem (RNDP) and public transport network design problem (PTNDP) ( 24 ). Figure 2 shows examples for the decisions that have to be handled at the strategic, tactical, and operational level. The proposed PUDO methods may be considered as an additional element at the operational level of the UTNDP as they influence capacity and travel time within a planned network.
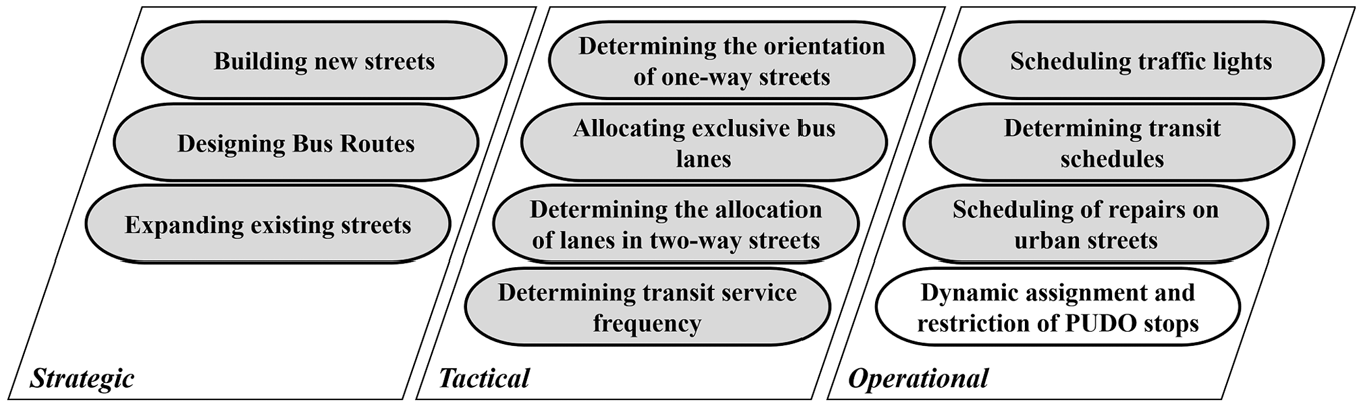
Examples of the decisions that are part of an urban transportation network design problem ( 24 ) with a possible localization of PUDO measures.
The literature review presented above identifies problematic effects of frequent MoD operations. To the best of the authors’ knowledge, there is no literature providing mitigation measures to limit the impacts of an unlimited PUDO operation without changes in infrastructure, except for adjusting traffic signal timings or locating the stopping position away from the intersection. This leads to the identified research gap of how to minimize the impact of such short-term disturbances without infrastructural changes like a citywide implementation of passenger loading zones. Such strategies have an advantage in implementation cost and time. They can further complement infrastructural measures, for example when dedicated passenger loading zones are overcrowded. Therefore, this paper presents two possible methods that can ultimately be building blocks for reducing the use of public space for road infrastructure, while retaining a reliable and efficient transportation system.
Novel Approaches for Minimizing the Effects of PUDO Events
At the Intersection Level: MoD Stops in Direct Proximity to Urban Intersections
The capacity of an undisturbed urban street network is usually limited by the capacity of its intersections. Any disturbance that is located close to the intersection will lead to inefficiencies, as traffic signal timing is typically calculated assuming an unhindered traffic flow. As described in the background section, the first approaches to minimize the influence of short-term disruptions either relocate the vehicle’s stopping position far away from the intersection or modify traffic signal timings. Different from those approaches, the scenario and developed control algorithm described below aims to not impose another control variable onto traffic signal optimization but to shift the optimization to the vehicle’s driving strategy level by finding an optimal stopping position depending on current signal timing. Such an approach offers more comfort and flexibility for both passengers and operators as it still allows them to board and alight at an intersection with reduced impact on traffic flow. At the end, the developed method will be evaluated against a scenario with evenly distributed stopping positions at the intersections and against scenarios where the MoD vehicle always stops at only one of the positions as well as at a mid-block stop.
MoD Stops in Direct Proximity to Urban Intersections: Scenario
Today’s modern traffic signal timings depend on many factors already. They adapt to current demand levels or prioritize certain modes (especially public transport). Adding yet another factor (PUDO stop location) to this optimization seems not to be feasible without compromising other policy goals. Therefore, no modification of the signal timings based on MoD stops is desired in this scenario. Furthermore, restrictions on the location of PUDO events are assumed to be minimized for the sake of passenger comfort and flexibility of operators. Therefore, this study investigates stopping maneuvers in direct proximity to an intersection to find an impact-minimizing strategy for cases where mid-block stops are not possible or desired, or when dedicated passenger loading zones are overcrowded during the critical peak hour or just do not exist. The impacts of MoD stops will be investigated at two representative generic intersection layouts using microscopic traffic simulation. Both intersections have four approaches with a short dedicated left-turning lane, allowing traffic to perform permissive left-turns. Intersection 1 has one lane per direction as is common in dense urban areas off the main arterials, and intersection 2 has two lanes per direction. The general layouts including the possible stopping positions are visualized in Figure 3. The reason for the usage of two different layouts is that at intersection 2 the stopping MoD vehicle acts as a bottleneck which can be overtaken, while in the case of the one-lane-per-direction layout the whole link is blocked under the assumption of minimized street width and frequent oncoming traffic. Turning ratios are set at 85% straight ahead, 10% right-turn and 5% left-turn corresponding to typical European intersections. The cycle length of the traffic signals is set to 90 s with 35 s green time for each direction and 10 s intergreen time (including red–amber and amber) for intersection 1. Intersection 2 uses 30 s of green time to offer an extended intergreen time of 15 s to the the left-turners, allowing them to clear the larger intersection area in time. To be able to deduce general conclusions, traffic conditions are set at 50%, 70%, and 90% of the theoretical capacity according to German guidelines ( 25 ).
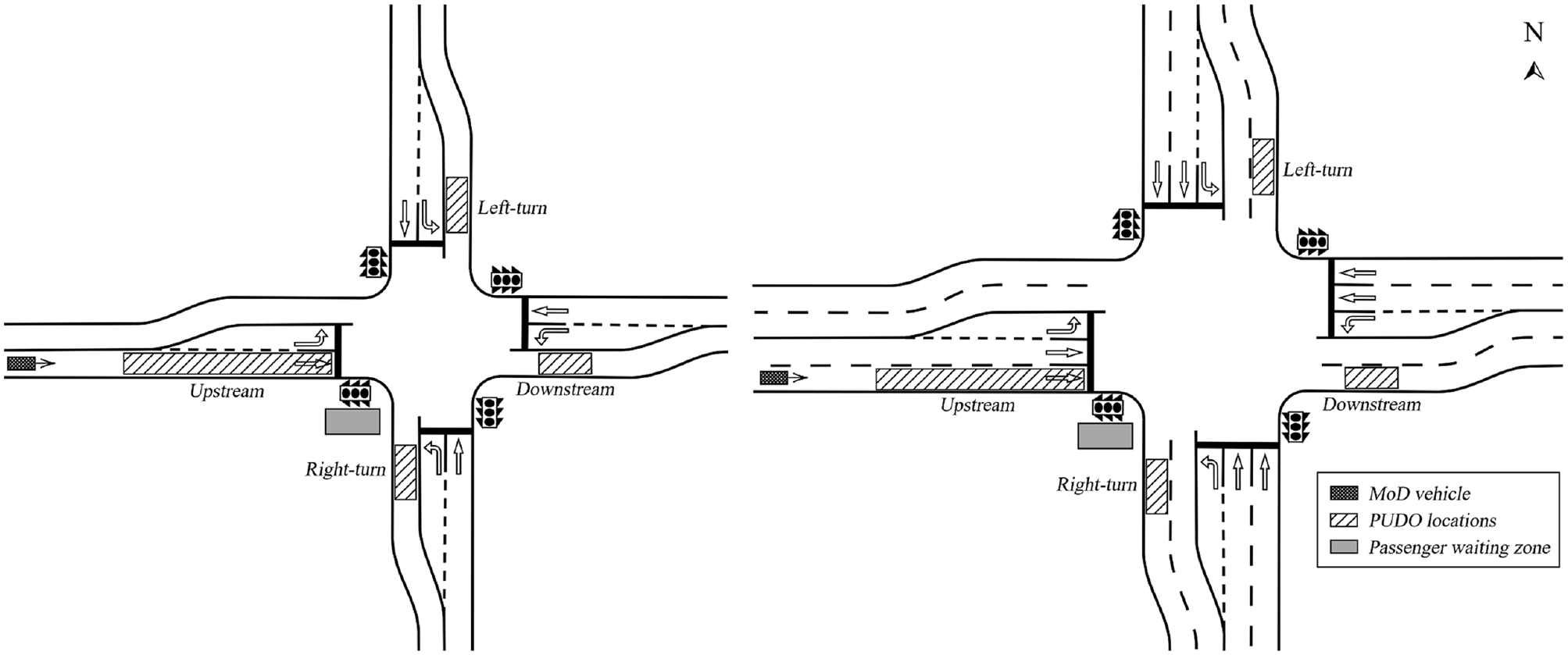
Position of the four possible PUDO locations at intersection layouts 1 and 2.
To reduce complexity in this first evaluation of the presented concept, all stops are carried out by MoD vehicles arriving from the west. Four different PUDO positions are set up, as can be seen in Figure 3. Downstream PUDO zones are located approximately 18 m behind the pedestrian crossing area (allowing two average sized vehicles to queue behind the MoD vehicle to avoid an immediate backlog onto the intersection area).
Literature on PUDO duration is scarce. Ranjbari et al. ( 16 ) determined an empirical dwell time distribution of MoD vehicles surveyed in their test area. Given that such distributions highly depend on the surroundings, existing policies, and stopping location (e.g., on-street versus in a passenger loading zone), it is assumed in this present study that all PUDO events have a duration of 30 s. This value was derived from nonrepresentative random samples of taxi services and is a common assumption ( 15 ). This fixed value without standard deviation is supported by the assumption of high automation of MoD services in the future. It can be furthermore assumed that passengers will have to check in at their pick-up location, minimizing the need for a long on-street waiting time of the vehicle.
Dynamic pick-up maneuvers are more complex than drop-offs because the passengers have to be informed in advance early enough to comfortably reach the allocated boarding zone in time. It is assumed that in the future, users will be able to react to short-term requests from their smart devices. These devices will then guide the passengers to the correct boarding location. Passengers can wait at the southwest corner of the intersection until they receive the respective notification. Any position except for the left-turn position can potentially be reached within the short time frame of the arrival time prediction that triggers the stop location assignment. Furthermore, we assume that MoD vehicles are either centrally controlled autonomous vehicles or human-driven vehicles that follow a centrally controlled navigation (e.g., via a mobile application), where the routing can be modified in real time. Alternatively, approaching vehicles could get a stopping position assigned via vehicle-to-infrastructure (V2I) communication.
MoD Stops in Direct Proximity to Urban Intersections: Method Development
Before starting the model development itself, a reliable arrival time prediction has to be developed first. Depending on the current signal timing as well as moving and queuing vehicles in front of the MoD vehicle, the number of seconds until the MoD vehicle will arrive at the beginning of the upstream PUDO location is returned. Therefore, reliable real-time information supplied from either static detectors or V2I communication is assumed. The predicted arrival time is then set in relation to the remaining phase time of the green or red signal at the point of arrival. This resulting remaining signal timing is used as a predictor for the assignment of the PUDO locations in the subsequent method development.
The method development itself is conducted in multiple steps. First, the effect of every position is evaluated for all possible signal timings in relation to its resulting average delay. Average delay is defined as the averaged delay (actual travel time compared with traveling with the driver’s desired free-flow speed) of all vehicles that pass the end of the travel time measurements over the simulation period ( 26 ). Travel time measurements are defined on each approach, ending after successfully passing the intersection and all associated stopping positions. During each simulation run, delay is evaluated over two signal cycles after the MoD vehicle’s arrival to include possible effects on the succeeding cycle (leading to 180 s). This database is then used to identify significant differences of average delay time at the intersection. Based on these findings, a rule-based algorithm for the signal-timing-dependent optimal allocation of PUDO locations is developed and evaluated. The main steps are visualized in Figure 4. These steps have to be conducted for every investigated infrastructure and demand level. Step 1, which involves conducting the data collection runs, is performed as follows. To be able to isolate the effects of the different arrival times and positions, every single simulation run contains only one PUDO event. During each simulation run, the average vehicle delay over the time of two signal cycles after the begin of the MoD stop is recorded. It is then assigned to a signal timing cluster. These clusters depend on the signal phase and timing at the time of arrival of the MoD vehicle at the upstream PUDO area. Every signal timing cluster has a length of 5 s except for two modifications: because it is extremely rare to have a MoD vehicle arriving directly at the beginning of the upstream PUDO location during the first 5 s of a green phase, as there is a high probability of a queue that has to disperse first, the first two green clusters are combined into one; the same applies for the last two red clusters as the MoD vehicle usually joins the end of an already existing queue in this situation. This leads to six time slots during the green phase (with a running green time smaller than or equal to 10, 15, 20, 25, 30, or 37 s) as well as nine time slots during red (with a running red time smaller than or equal to 5, 10, 15, 20, 25, 30, 35, 40, or 53 s). The two-lane intersection has to use slightly different slots because of the longer intergreen times explained above (leading to green slots ending at 10, 15, 20, 25, and 32 s as well as red slots ending at 5, 10, 15, 20, 25, 30, 35, 40, 45, and 58 s).
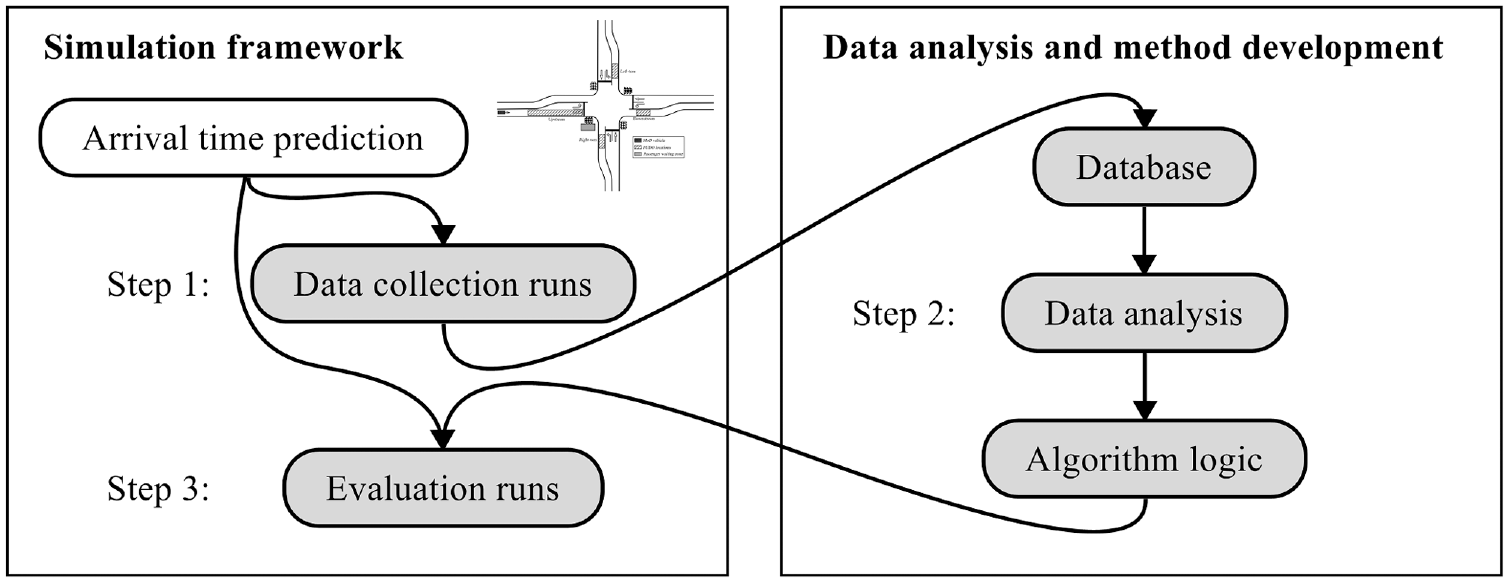
Visualization of the methodology of the PUDO location assignment algorithm development.
Using microscopic traffic simulation (PTV Vissim [ 26 ]) with random entry times of the MoD vehicle, 20 evaluation results for every time slot and every stop location are conducted and stored in the database. Because of the random number of other vehicles in front of the MoD vehicle, the network entry time does not give a clear indication of when the vehicle will actually arrive at the first PUDO location. As this makes the arrival time prediction an important influencing factor, it was evaluated as well. The results were sufficiently good, with a mean deviation of 2.27 s (standard deviation of 2.51 s) at intersection 1 and 2.68 s (standard deviation of 3.31 s) at intersection 2 in the most challenging case of 90% demand. All other combinations showed smaller mean and standard deviation.
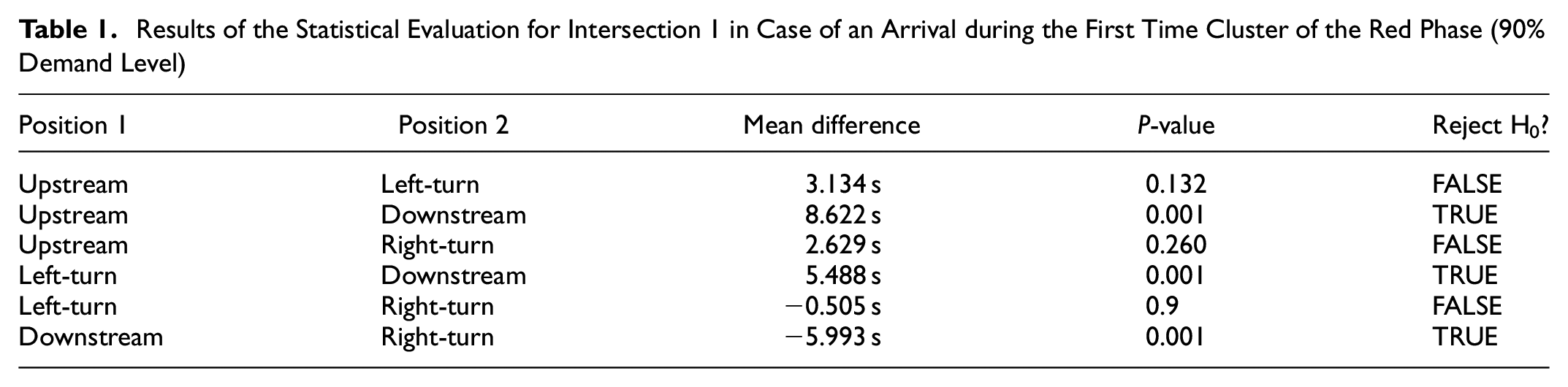
The next step is the analysis of the data set just collected. For each intersection layout, the location with the best result (least overall delay) is identified for every time slot. To find significant differences, a Kruskal–Wallis Test with a Tukey post hoc test was used as some of the (by study design independent) sample groups did not satisfy homogeneity of variances or did not follow a normal distribution. In the best case, the post hoc test (that is conducted for every time slot) would show significant differences of one position in comparison with all the other three positions. However, this was not the case for all time clusters. Such a situation offers two possibilities: a straightforward approach would be to still choose the position with the least delay even though the alternatives with nonsignificant differences would have been viable alternatives; a more flexible and sophisticated approach would be to offer all positions with nonsignificant differences to the TNCs to let them or their passengers choose their favorite position (e.g., depending on an optimized route). In this first study, the straightforward option was chosen to prove the general concept. As the collected data set is quite extensive, the following example for the 90% demand level at intersection 1 will give an overview of the general proceedings. The results of the Tukey post hoc test for an arrival during the first time cluster of the red phase (first 10 s) are provided in Table 1. As can be seen, all combinations of the four possible stopping positions are compared with each other. A difference is significant if the null hypothesis H0 (“the means are equal”) can be rejected (“TRUE”) at the significance level of
Results of the Statistical Evaluation for Intersection 1 in Case of an Arrival during the First Time Cluster of the Red Phase (90% Demand Level)
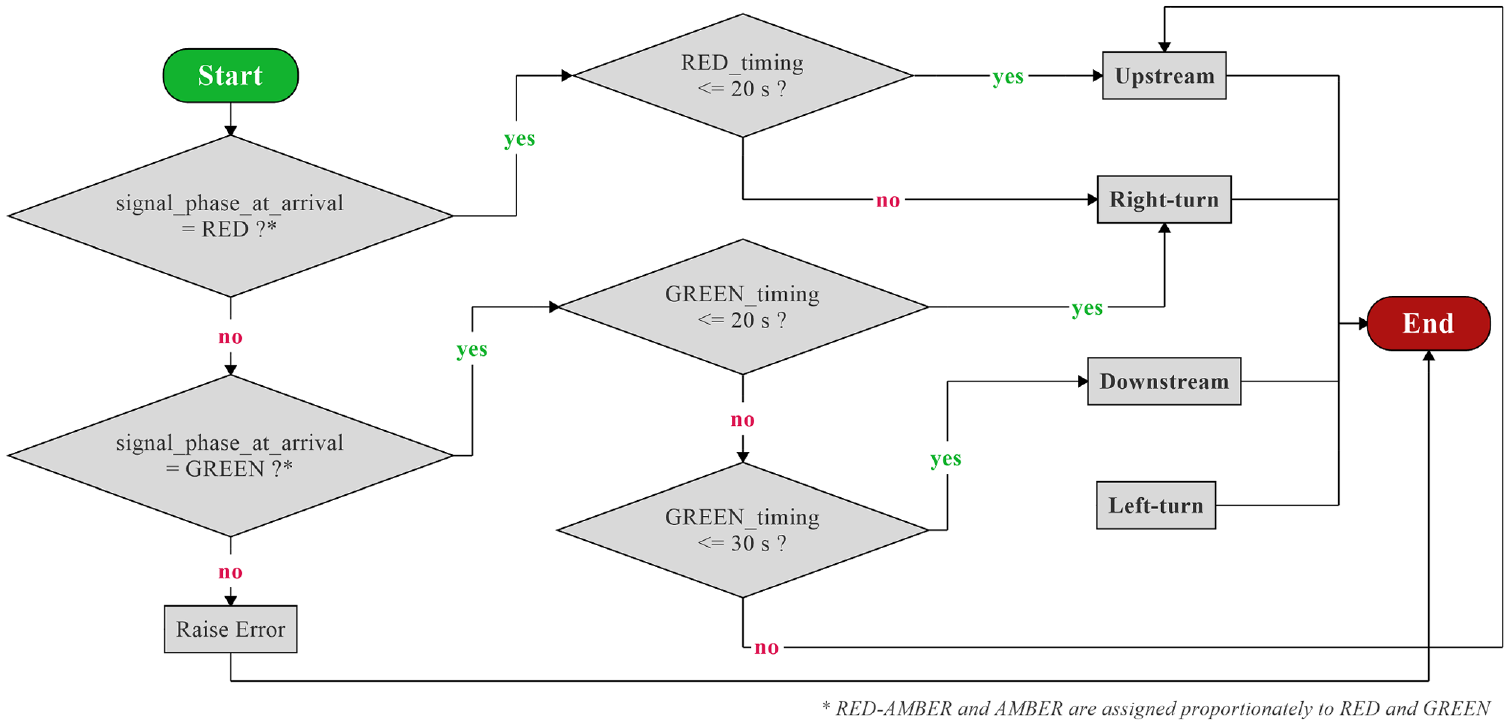
Visualization of the proposed algorithm for intersection 1 at 90% demand.
Used Allocation Timings at the Two Intersection Layouts for All Demand Levels
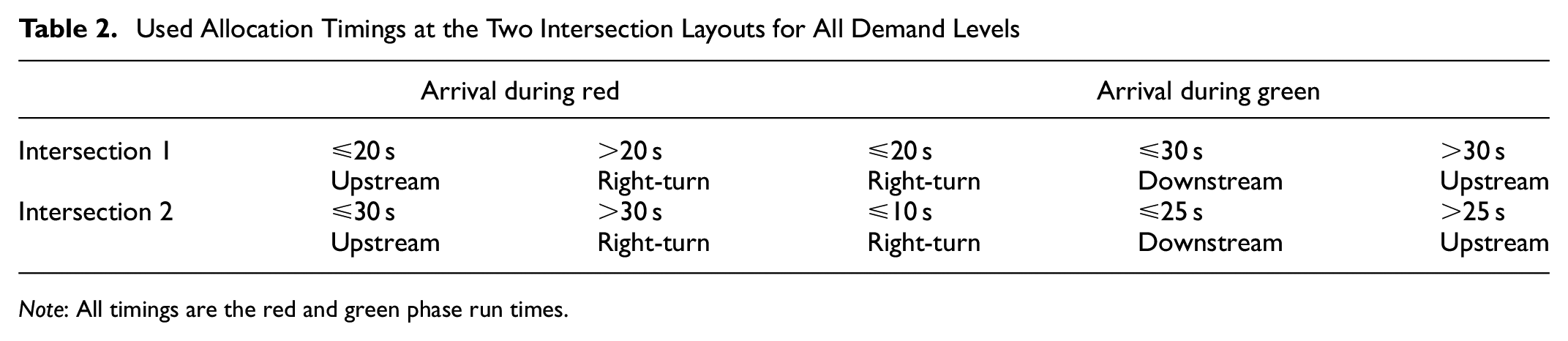
Note: All timings are the red and green phase run times.
MoD Stop Assignment in Direct Proximity to Urban Intersections: Results
To evaluate this first development, the algorithm is compared against a base scenario of random (but uniformly distributed) sequences of stop positions in continuous simulation runs over 1 h. After an additional warm-up period of 30 min, MoD vehicles arrive from the western approach at a random point in time during every second signal cycle. This results in an average of one arrival every 180 s.
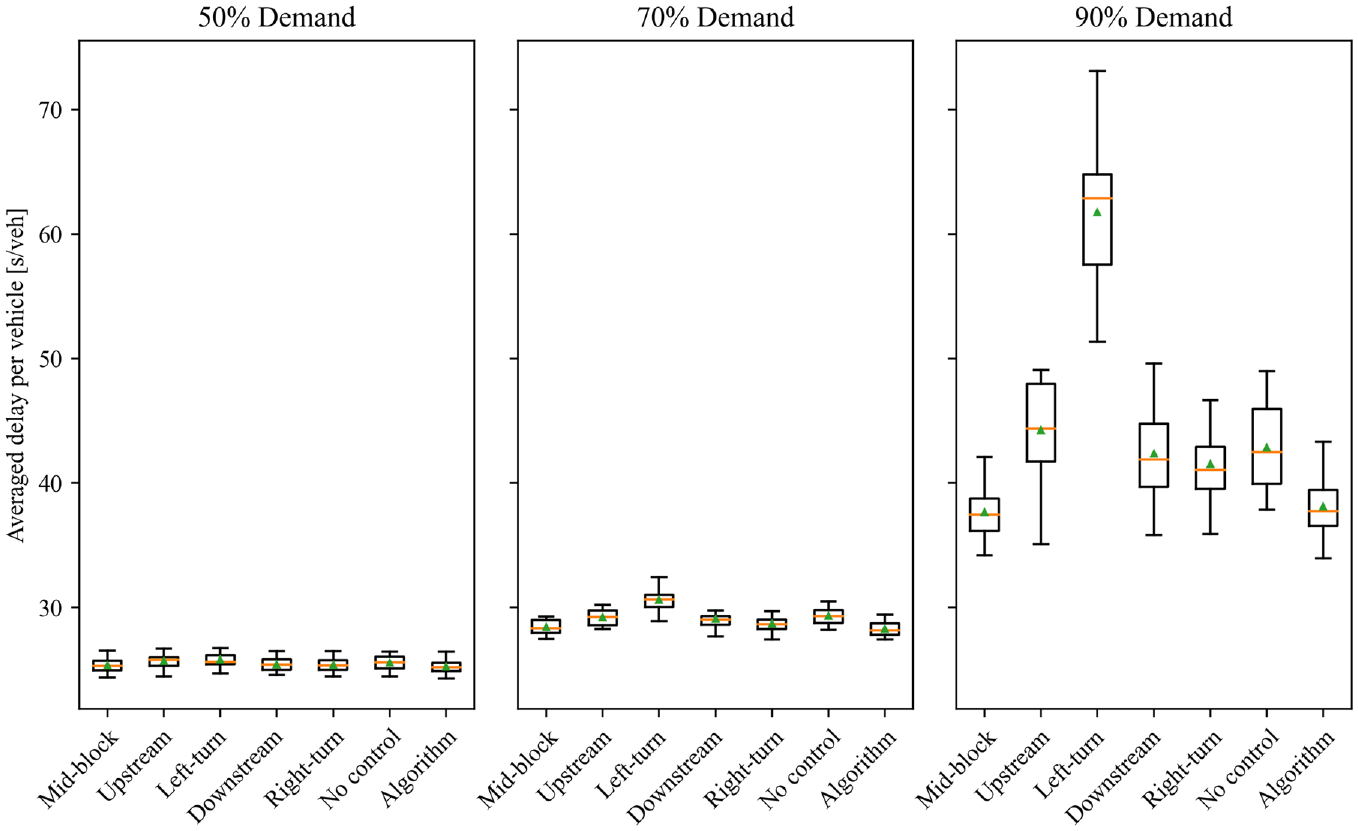
Results of this evaluation (base versus algorithm-controlled scenario) are visualized in Figure 6 for the one-lane-per-approach layout (intersection 1). In addition, results of simulation runs in which the vehicles always stopped at the same of the four possible positions or the mid-block stop over the whole simulation period are shown. All boxplots show the results of 20 simulation runs. Average delay per vehicle is indicated by the green triangle, and the orange line shows the median.
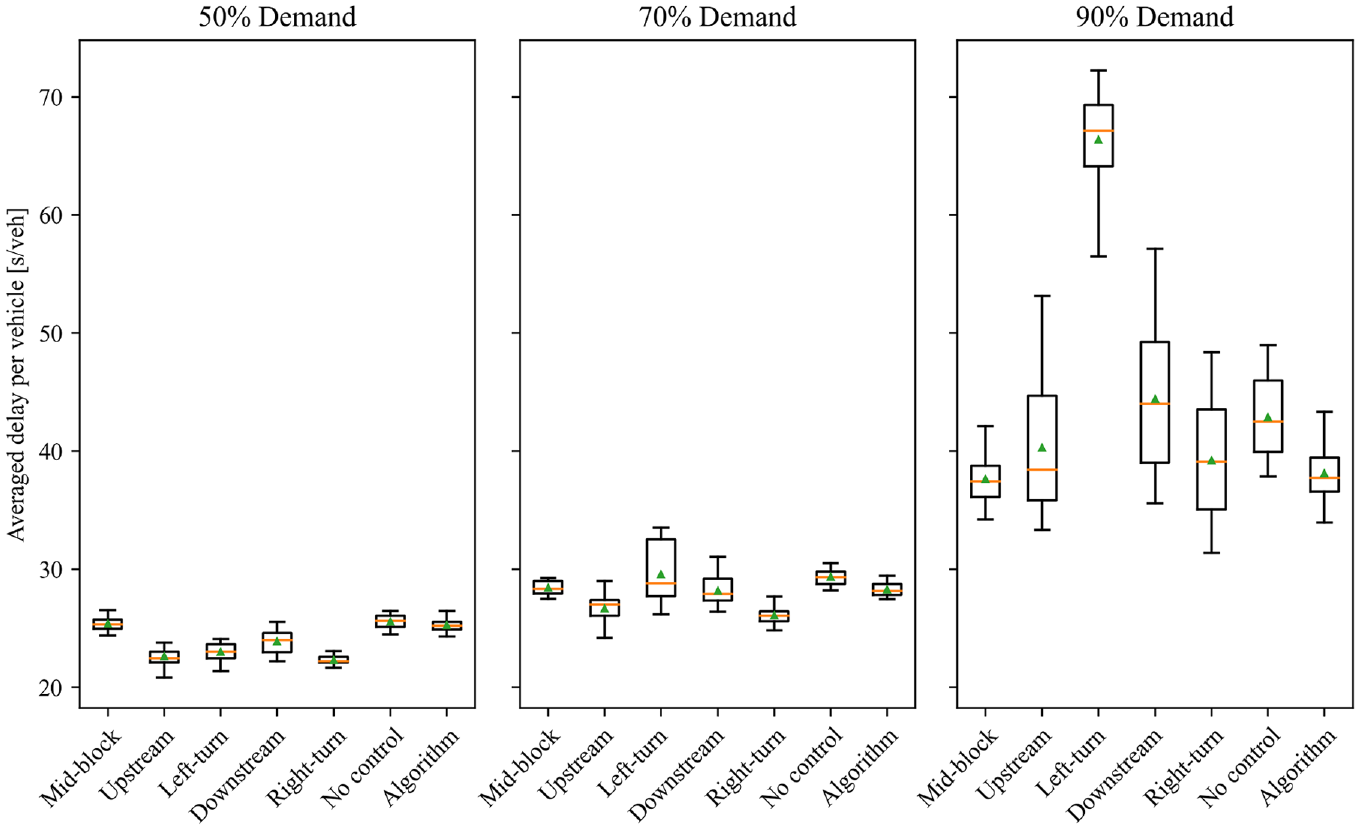
Boxplot of the resulting overall delays at for intersection 1 for all locations as well as for the proposed PUDO position assignment algorithm.
As can be seen, our algorithm outperforms the uncontrolled scenario on every demand level at intersection 1. The largest differences appear in the 90% demand case, with an average delay per vehicle of 40.56 s with no control and 35.59 s in the controlled case. For standard deviation, the largest differences can be detected in the case of the 90% scenario (3.75 s versus 2.85 s). As the scenarios use the same arrival times (generated randomly in the beginning) as well as the same sequence of random seeds, a paired T-Test is conducted to check for significant differences. Differences for the 50% demand level were found to be significant with a p-value of
What can be further observed from the results is that the permissive left-turn was an unattractive option at the two higher demand levels as MoD vehicles have to yield to oncoming traffic and often only reach the stop position during the intergreen time. This causes them to block the crossing traffic stream that is usually saturated at the beginning of its green phase. Opposite to this observation, stops after constant right-turns led to the best results without an algorithm-controlled assignment. Additionally, to benchmark our developed method against the most mentioned alternative in literature, we added a mid-block stop to our simulation framework. In both intersection layouts, the mid-block stop is located 110 m upstream of the stop line. This is equal to half of the average distance between the intersections in our larger network representing a real corridor in the city of Munich, Germany, that we use for the evaluation of the second method. The presented algorithm significantly outperformed the mid-block stopping position for the 50% and 70% demand level. Contrary to that, the mid-block stop outperformed the algorithm for the 90% level (32.66 s versus 35.59 s,
Results for the two-lane intersection layout of intersection 2 can be seen in Figure 7. No significant difference could be found between the uniformly distributed and algorithm-controlled scenarios for the 50% demand scenario (
Boxplot of the resulting overall delays at for intersection 2 for all locations as well as for the proposed PUDO position assignment algorithm.
MoD Stop Assignment in the Proximity of Urban Intersections: Discussion
In this first study, a mandatory allocation of stopping positions at intersections has been investigated for three different demand levels at two intersection layouts. The results show that a simple rule-based algorithm can be used to stabilize traffic systems during critical periods with high traffic volumes. Delays can be reduced significantly at almost all investigated demand levels, especially at intersection 1 where stopped MoD vehicles cannot be overtaken. An additional important factor is the reduction in standard deviation, leading to a much more stable environment as a disruption of traffic flow will be less likely to recover when traffic is saturated. The positive effect at the network level may be much larger than the results at intersection level suggest.
An interesting effect could be observed when comparing the developed algorithm against the mid-block scenario at the highest demand level: always stopping at the mid-block outperforms our algorithm for the one-lane scenario of intersection 1. This effect is caused by the mid-block stop being located 110 m upstream of the stop line. As this distance is longer than the average queue length (that ensures a saturated green phase), two mitigating effects can be observed at the 90% demand level: either enough vehicles have queued between the stopped MoD vehicle and the stop line to utilize the green time until the delayed flow of vehicles reaches the end of the dispersing queue, or the stopped MoD vehicle will only block the flow at the less saturated end of the green phase for a short period of time. This result is in line with other studies and indicates that mid-block stops have a reduced negative effect compared with near- and far-side stops. However, the developed algorithm still remains relevant for the scenarios identified above–for example when increased flexibility in PUDO locations can be provided or a mid-block stop is not possible. In addition, the potential for further improvement of the algorithm (and thus its results) is shown below.
As can be seen from the results of the data collection runs, not all positions return significant differences at all times. In such cases, it would be possible to only restrict certain significantly worse positions and to let passengers or MoD providers choose their preferred stop among the remaining positions. The PUDO position can then consider the route of the vehicle or just be the closest position to the waiting passenger or the destination of an alighting passenger. Such a policy can help to mitigate possible delays or inconveniences for MoD passengers when the vehicle has to take a route that deviates from the preferred route. Additionally, the upstream position allows providers to conduct the stop during the red light and therefore offers the best MoD vehicle operation efficiency (reduced time loss as well as all turning options for further routing). This may be especially relevant in congested networks where every deviation from the fastest route may cause disproportional additional delay for both in-vehicle passengers and waiting passengers.
The application of the algorithm is not limited to one of the intersection approaches, but can be applied to all approaches simultaneously. The algorithm can be expanded indefinitely in theory. Further research can investigate relationships between simultaneous MoD arrivals. If needed, more distinctions could be analyzed, by, for example, simulating and extending the algorithm with different combinations of demand levels.
The presented methodology requires the data collection simulation runs to be conducted for every infrastructural characteristic and different demand levels. A database of standard layouts, signal timings, and demand levels can mitigate this effort. With the emergence of digital twins, calculations may be feasible in real time in the future. PUDO location management should be adapted to existing infrastructure characteristics. An algorithm developed for a different number of lanes or dwelling time distribution may not yield optimal results in a different environment. Moreover, the dwell time can have a considerable impact on the optimal PUDO location. For example, an extended stop at an upstream PUDO location may exceed the red duration and would have led to a different stop location allocation. In the case of intersection 1, a straightforward solution for this problem would be to let the vehicle drive around the block. Check-in procedures and automated payments can help to reduce standard deviation. This shows that further detailed investigations and developments are justified in this field of research.
Two main requirements need to be fulfilled for a successful implementation: First, reliable estimations for the arrival of the MoD vehicle as well as for signal timings have to exist. Second, either the MoD provider or the vehicle itself has to communicate with the infrastructure and passengers in real time. Besides these factors, the dwell time has a considerable impact on the findings and influences the results of the algorithm. Stops with an uncertain duration may have to be conducted mid-block. Another limitation concerns the conducted simulations itself. Because of the lack of suitable data sets for the calibration of MoD vehicle interactions, standard parameters have been used for this first investigation to show and validate the idea of the presented concept.
At the Network Level: PUDO Restriction Zones
So far we have looked at PUDO events close to an intersection. However, PUDO events can take place at any location on a link. Even though literature strongly suggests that mid-block stops have the least impact on traffic flow, link capacity will still be reduced temporarily by a PUDO event at any position. This can have an impact on overall network performance, leading to the question whether a temporary limitation of the number of allowed PUDO events in parts of the network can help to minimize the described negative effects.
PUDO Restriction Zones: Scenarios
As concluded above, small disruptions can have a long-lasting effect on traffic performance in a saturated network as recovery is uncertain under high demand levels. The following scenarios support the method development and evaluation of a temporary georeferenced limitation of the density or total number of PUDO events. Figure 8 shows three scenarios for a possible application. The network on the left side shows a dynamic reaction to a nonrecurring event: an urban arterial road is closed (e.g., because of an accident), which can lead to a significantly higher traffic volume on possible detour routes (alternative routes 1 and 2). Therefore, this variant of a PUDO restriction zone may be used as an operational measure to create additional short-term capacity. The second street network on the right side shows two possible tactical applications for management of recurring events. First, a small residential area is declared as a PUDO restriction zone during nighttime to reduce noise emissions. During these times, passengers have to board and alight in one of the surrounding streets and walk a reasonable distance. A dynamic system could make this restriction dependent on current weather conditions. For example, the restriction could be omitted if noise originating from heavy rainfall would predominate over PUDO noise. Second, a PUDO restriction zone is established during peak hours along a critical arterial to ensure that it is providing the capacity that was assumed when solving the RNDP.
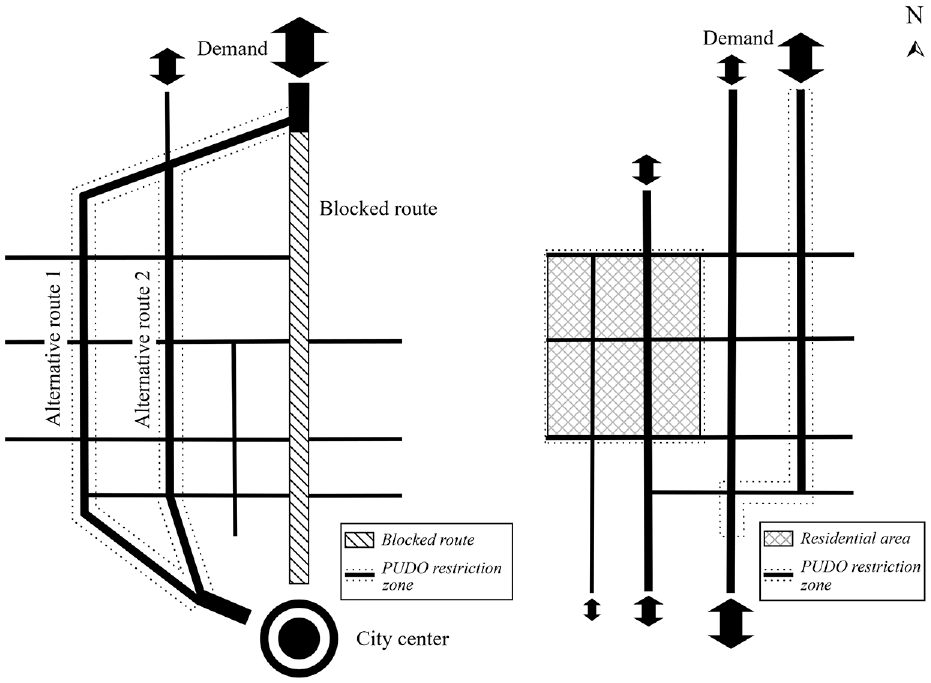
Possible applications for PUDO restriction zones: a road closure (left), and in a residential area during nighttime as well as along a corridor of critical network elements (right).
For a first evaluation of the concept, the road closure scenario is simulated and discussed in this study. A traffic control center (or similar authority) decides to limit the number of allowed PUDO events on the alternative routes. Here, no PUDO events at all are allowed on the alternative route in the “PUDO on side streets” scenario. Overall, four scenarios are investigated: “No MoD traffic,”“Unrestricted PUDO on main street,”“PUDO on side streets” and “Mid-block PUDO on main street.” In the “PUDO on side streets” scenario, no PUDO stops are allowed at all on the main route (which is defined as alternative route 1 in the following investigated scenario). On this route, PUDO events have to be relocated to alternative stopping positions in the side streets (see Figure 9). In accordance with the evaluation of our first method, the “Mid-block PUDO on main street” investigates a policy of always stopping at the mid-block position for the main route.
Explanatory layout of the alternative stopping positions of the two scenarios “Unrestricted PUDO on main street” and alternative “PUDO on side streets” positions at a block between two signalized intersections.
PUDO Restriction Zones: Simulation Setup
In our simulation scenario, we evaluate the southbound traffic on alternative route 1 as this route is assumed to be communicated as the official detour route, to reserve alternative route 2 for public transport vehicles. The road network is derived from a real-world scenario from the city of Munich, Germany, and offers a representative European street layout, in, for example, the length of the housing blocks. The length of the complete detour route is roughly 1.25 mi (2 km). PUDO events are conducted at four adjacent blocks in the middle of the detour route, while the travel time measurements are conducted along the complete route to account for backlog effects. Over the simulation period of 1 h (after 30 min of additional warm-up) one PUDO event per house block is conducted every 5 min. Except for the mid-block stop scenario, stops happen at one of three possible stopping positions at each block (see Figure 9). The sequence of the stops at each block is created in a structured way to produce different combinations along the numerous blocks over the simulation runs (i.e., sequence downstream–mid-block–upstream at one block versus sequence mid-block–downstream–upstream at the next block and so forth). A high standard deviation of 90 s of the MoD vehicles’ network entry times creates different combinations of actual arrivals. Again, a dwell time of 30 s is assumed. Traffic signals are not coordinated but programmed to provide a high capacity on the alternative route (50 s of green time within a cycle time of 90 s). The detour route has one lane per direction. Dwelling MoD vehicles can be overtaken if oncoming traffic allows for it. Again, three demand levels (50%, 70%, and 90% of the theoretical capacity) are calculated according to German guidelines ( 25 ). Fifteen simulation runs are conducted with different random seeds.
PUDO Restriction Zones: Method Development
The proposed PUDO restriction zones temporarily only allow for a certain frequency of PUDO events per MoD provider in selected zones. As described in our scenarios, PUDO restriction zones could be georeferenced either along specific links or within a certain zone. A possible link-based unit could be the number of allowed PUDOs per kilometer per hour. Alternatively, zones could be regulated by the number of allowed PUDOs per square kilometer per hour. A possible standard for data transfer could be to extend an existing data exchange format (e.g., DATEX II) with this functionality and exchange the information with the respective TNCs in real time. This methodology allows for a flexible adjustment of the number of stops to only impose as many restrictions as needed.
PUDO Restriction Zones: Results
As can be seen in Figure 10, all demand levels returned the highest average delay per vehicle when the PUDO events were carried out directly on the detour route. The difference in the case of 90% demand was an average delay of 391.38 s, compared with 123.58 s when MoD vehicles had to use alternative locations in side streets. This is a considerable reduction of about 68%. Conducting the PUDO events in side streets caused only slightly more delays than in the base case with no MoD services at all.
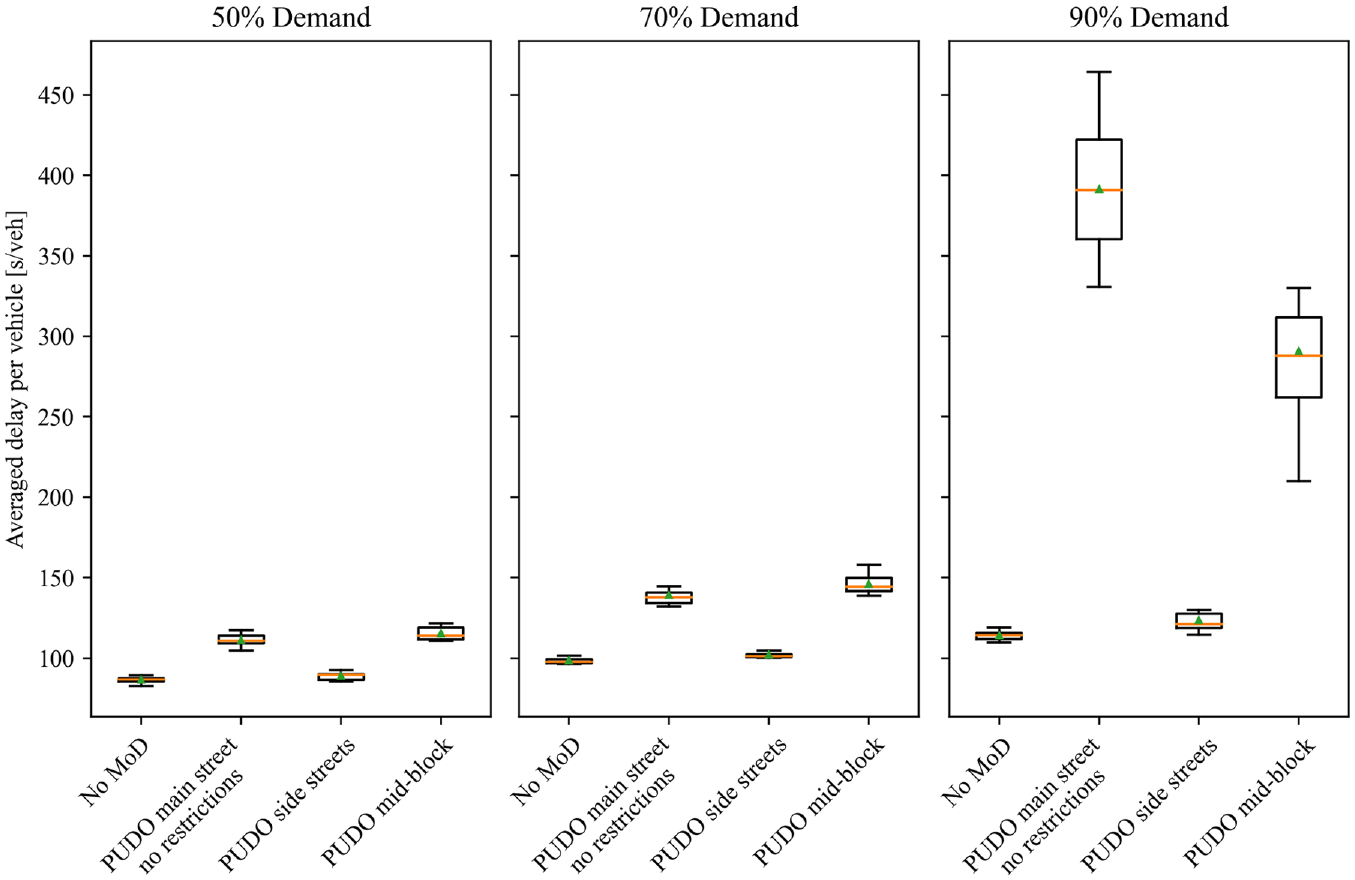
Results of the evaluation of the PUDO restriction zones on a detour route for three different demand levels.
As the variance of the results was not homogeneous over all groups (with a variance of 1837.33 s 2 for the “Unrestricted PUDO on main street” scenario compared with 74.17 s 2 for the restricted scenario and 8.31 s 2 for the “No MoD traffic” scenario), a nonparametric test was applied. The Kruskal–Wallis test returned significant differences between the scenarios on all demand levels. A post hoc test (Schaich–Hamerle) was applied in a second step to allow for a pair-wise comparison of the different scenarios. The critical rank difference was determined as 2.84. All scenarios showed a significant difference at the different demand levels (e.g., a rank difference of 22.20 at 90% demand for the comparison of “Unrestricted PUDO on main street” and “PUDO on side street”). Additionally, the proposed control considerably reduces the standard deviation in the critical case of 90% demand (from 43.28 s to 8.61 s). When comparing the results with the “Mid-block PUDO on main street” scenario, it can be observed that the standard deviation is higher than for the more distributed stopping positions of the “Unrestricted PUDO on main street” scenario. Delay in the undersaturated demand scenarios slightly increased as well. It did, however, significantly decrease delays to 290.61 s in the 90% demand case (while still causing a higher standard deviation).
Although average speeds are directly related to the average vehicle delay, a short overview is given in Table 3. As can be expected from the previously presented results, the average speed drops considerably for the case of PUDO events on the main street during high demand.
Results for the Average Speeds of All Vehicles over the Simulation Period of 1 h
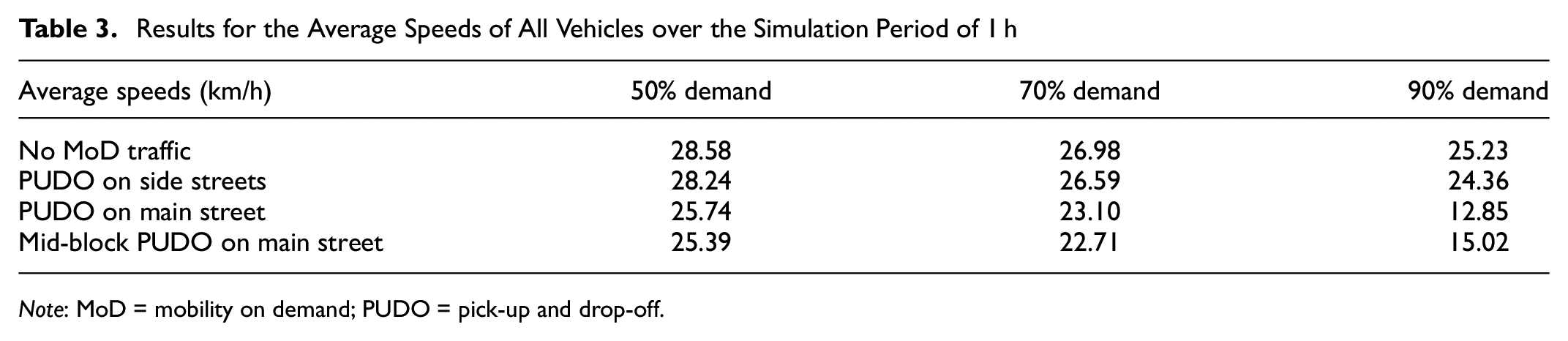
Note: MoD = mobility on demand; PUDO = pick-up and drop-off.
PUDO Restriction Zones: Discussion
The second study of this paper investigates the effects of PUDO events on a critical road in a road network using microscopic traffic simulation. The results for the average delay of all vehicles over the simulation period of 1 h indicate that at all investigated demand levels the relocation of PUDO events to the subordinate streets results in significant reductions of average vehicle delay. This does not only apply to the average itself but also to the standard deviation. All differences increase with higher demand levels. This indicates that PUDO restriction zones can help to stabilize saturated urban traffic systems. When comparing these results to the “Mid-block PUDO on main street” policy, delay could be reduced during high demand levels as well (albeit on a smaller scale than when stopping on side streets). These findings are in line with the observations of the first method’s evaluation that the mitigation effects of the mid-block position start to show at high demand levels when a larger number of vehicles is queued in front of the MoD vehicle. However, frequent disturbances at the exact same location seem to cause an increase in standard deviation. This shows that the provided travel time improvements at high demand levels cannot be guaranteed as reliably as when PUDO restriction zones are introduced. The findings are especially interesting as an alternative possible outcome could have been that the numerous traffic signals on the alternative route disrupt traffic flow strongly already, leading to a reduced impact of the additional short-term disruptions of MoD vehicles.
Similar to the evaluation of the first method, standard parameters were used in the simulation. No specific calibration (e.g., in relation to the interaction of a dwelling MoD vehicle and overtaking traffic) was performed because of a lack of existing data. The quantitative results may be limited as a consequence, although the qualitative confirmation of the presented concept may still be given in any case. That the results are in line with the literature review, which found that even short-term parking maneuvers can disrupt traffic flow significantly, supports this conclusion further. A further limitation of the current simulation framework is a missing estimation of MoD vehicle rerouting effects. Stopping at positions that are not optimal from a routing perspective may cause additional delays for passengers in the vehicles as well as waiting passengers. A possible solution to mitigate these effects would be to allow to deviate from the assigned stops in certain situations to reduce the number of long detours. It can be assumed that the negative effect of the necessary rerouting may decrease depending on trip length as MoD vehicles profit from a more stable network with shorter travel times as well. Therefore, investigating the effects of the proposed method in a larger network is an interesting field of further research.
Naturally, PUDO restriction zones can be implemented on any saturated street sections, not only for nonrecurring disruptions like the closed road used in the investigated scenario. Furthermore, they can be used on a strategic level to reduce local emissions or to increase safety directly in front of critical infrastructures like kindergartens or schools. To conserve the benefits and flexibility of MoD services, PUDO restriction zones should only be applied if necessary in both time and location. PUDO restriction zones can also be included in the UTNDP to find a better cost-optimal solution for infrastructure dimensioning based on a more reliable estimation of capacity on critical links. This can also include the introduction of dynamic capacity management that reacts in real time and adjusts the maximal number of PUDO events to ensure a certain capacity that was assumed during the planning process. Besides this, an increased reliability of network capacities increases planability for other traffic management measures as well, allowing for flexible reactions to nonrecurring disruptions in the network.
Comparison with Alternative Mitigation Methods
The literature review found multiple alternative methods that help to reduce the impact of MoD PUDO maneuvers on traffic flow. A comparison with these methods is important as all solutions come with different levels of limitation and complexity. Although the presented methods in this paper restrict possible PUDO positions (causing reduced flexibility compared with no restrictions at all as well as possible longer MoD passenger travel and waiting times as a result of rerouting), they may still offer more flexibility than more restrictive policies. They furthermore allow simultaneous use with other measures.
On the one hand, main advantages of infrastructure-independent methods are the lower cost and shorter implementation time, allowing for a more flexible implementation. Additionally, they may become a complementary measure when scarce curb space constrains the allocation of passenger loading zones. On the other hand, dedicated infrastructure would offer high availability as well as the least impact on traffic flow if dimensioned sufficiently. Should MoD services be mandated to exclusively conduct PUDO events at dedicated infrastructure, a possible door-to-door service could be strongly limited.
Infrastructure-independent approaches like the presented methods or the adaptation of traffic signal timings increase the complexity of traffic control. Specifically, the adaptation of traffic signal timings may be limited for the abovementioned reasons (other policy goals like public transport prioritization, traffic demand of crossing directions, etc.). Contrary to the increased complexity, an adaptation of traffic signal timings may provide a high level of MoD-provider and customer flexibility, depending on the actual implementation. A possible straightforward regulation with low complexity would be to limit on-street stopping to mid-block positions. This might, however, not be possible for all road network layouts. Furthermore, this scenario strongly limits a possible door-to-door service, although it can be implemented very flexibly and possibly on demand during high traffic volumes (like all other infrastructure-independent measures). When comparing such a policy to the presented algorithm at the beginning of this paper, the mid-block stop outperformed the algorithm in the one-lane-per-direction scenario (for the critical 90% demand level), but did not return a significant difference in the two-lane scenario. This implies that the presented stopping position allocation method can be used as a valid alternative or addition at least for the two-lane scenario or when a small increase in delay is accepted to offer increased flexibility for MoD providers and passengers.
Conclusion and Further Research
In accordance with recent findings in literature, this paper finds that frequent MoD PUDO events do reduce the capacity of an urban road network. To still allow for the increased mobility and further benefits of MoD services, this paper proposes and evaluates two possible methods at a conceptual level to minimize the discussed impacts without the need for infrastructural changes. First, a signal-timing-dependent allocation of PUDO positions in direct proximity to intersections is proposed. Second, the idea of dynamic PUDO restriction zones is introduced, which can be used to achieve multiple goals. On the one hand, the zones can help to guarantee needed capacities on critical links within a network. On the other hand, they can help to reduce traffic and stopping maneuvers in certain areas. By that, emissions and possible impacts on traffic safety can be reduced. First evaluations of the two proposed methods show significant reductions in delay and that they help to retain a stable traffic state during high demand levels. Therefore, the proposed methods can contribute to a holistic regulatory framework for MoD services, resulting in city-compatible and dynamic MoD management, complementing infrastructural measures like dedicated passenger loading zones. In the end, all stakeholders including TNCs may profit from stable traffic conditions. Furthermore, consistent with previous studies, mid-block stopping was found to be a straightforward mitigation measure with measurable effects during high traffic volumes, although such a policy again limits the number of possible PUDO locations, which was one of the primary motivations for developing and evaluating the proposed methods.
The developed and evaluated methods are first steps to accompany infrastructural changes in the complex field of mitigating the negative effects of frequent stopping events. As already stated in the discussions, further research in this field is recommended. More studies on the duration of PUDO events, as well as on the willingness of passengers to accept a diversion from their desired PUDO location at short notice have to be conducted. Next steps can include increased flexibility for the TNCs—for example, by actively integrating the vehicle’s routing or by only restricting certain PUDO locations with an impact larger than a certain threshold. Additionally, interdependencies of arrivals from multiple directions can be investigated and integrated into the algorithm. Such studies would be even more relevant in larger networks to investigate the relationship between longer MoD travel times caused by the necessary rerouting and reduced overall travel times in a more stable network. Furthermore, data sets for calibration of the interaction of MoD vehicles with private traffic would be of interest. Besides that, a general investigation of further scenarios, intersection layouts, dwell times and traffic demands, as well as an evaluation of different forms of PUDO restriction zones, is of interest. Finally, a “toolbox” for different scenarios could be developed based on a sensitivity analysis of the parameters used in our evaluations. In the future, decisions for both proposed methods could be based on real-time traffic conditions. This can be implemented either on the basis of rules, or by a mathematical optimization, or by applying artificial intelligence to find the best combination of measures for the current traffic conditions. A real-time implementation would also allow application of the signal-dependent location assignment to adaptive signal controllers (given a reliable timing prognosis). Considering these fields of possible further research, the already positive effects of the two developed methods to help in preserving a stable traffic state may be further improved, to the benefit of all stakeholders.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: P. Stueger, F. Fehn and K. Bogenberger; data collection: P. Stueger; analysis and interpretation of results: P. Stueger, F. Fehn and K. Bogenberger; draft manuscript preparation: P. Stueger, F. Fehn and K. Bogenberger. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the German Federal Ministry for Digital and Transport (BMDV) in the course of the EASYRIDE project “Automated driving in an urban context - pilot city Munich” (Grant number 16AVF2108H).