
Abstract
Tolling normally has a dual purpose in Norway. Its first goal is to finance a project or an improvment in the transport services offered in an area, for instance extend public transport services. The second goal is to change travel behavior, encouraging drivers of private cars to use other more environmentally friendly modes. Today, this tolling system is based on fixed points on the road network which are not necessarily able to record all road usage evenly. Within the GeoSUM (Geofencing for Smart Urban Mobility) research project, a distance and fuel differentiated road user charging scheme has been piloted. Instead of fixed point tolling, this system enables the driver to perceive that the cost is directly related to how much gasoline or electricity is used on the road network. The key technology for this system is geofencing, and the pilot results show that the proposed system did indeed increase the amount electricity used for driving inside the geofence zones, reducing in turn the amount of fossil-based fuel used.
Many Norwegian cities struggle with the negative effects of car traffic, which present major challenges related to efficiency, safety, and the environment. Urban environment agreements were introduced in Norway’s National Transport Plan (2014–2023) to ensure a more holistic policy on spatial planning and transport in city environments. These agreements between the cities and the authorities aim to achieve zero growth in car traffic in urban environments by combining car tolling schemes with reward schemes offering a range of targeted funds. Despite these efforts, car traffic is still a problem in many urban environments in Norway, and new measures and policies are required.
In the research project known as GeoSUM (Geofencing for Smart Urban Mobility), cooperative intelligent transport systems (C-ITS) and geofencing are used to develop new tools for meeting these challenges. This entails the drawing of digital zones on a map, which is then directly transmitted to a vehicle and communicated to the driver through a human machine interface (HMI). Geofencing technology will be a prerequisite in future transport systems if automatic driving is to become a reality. Furthermore, the technology can be used to facilitate the implementation of a range of other applications within the field of transportation, including providing warnings about accidents and difficult road conditions, access control, collecting payment for parking, and differentiating between different road users (buses, private cars, heavy vehicles, fuels types, etc.) in tolling applications. Gaining more knowledge on the limitations and possibilities that this technology offers is therefore crucial.
The GeoSUM project will pilot two different use-cases were geofencing is used: i) restricting the top speed of vehicles in areas around schools; and ii) differentiating road user charging in low emission zones (LEZ), where the vehicles transmit relevant data, such as kilometers driven and fuel usage. Figure 1 illustrates the concepts of GeoSUM.
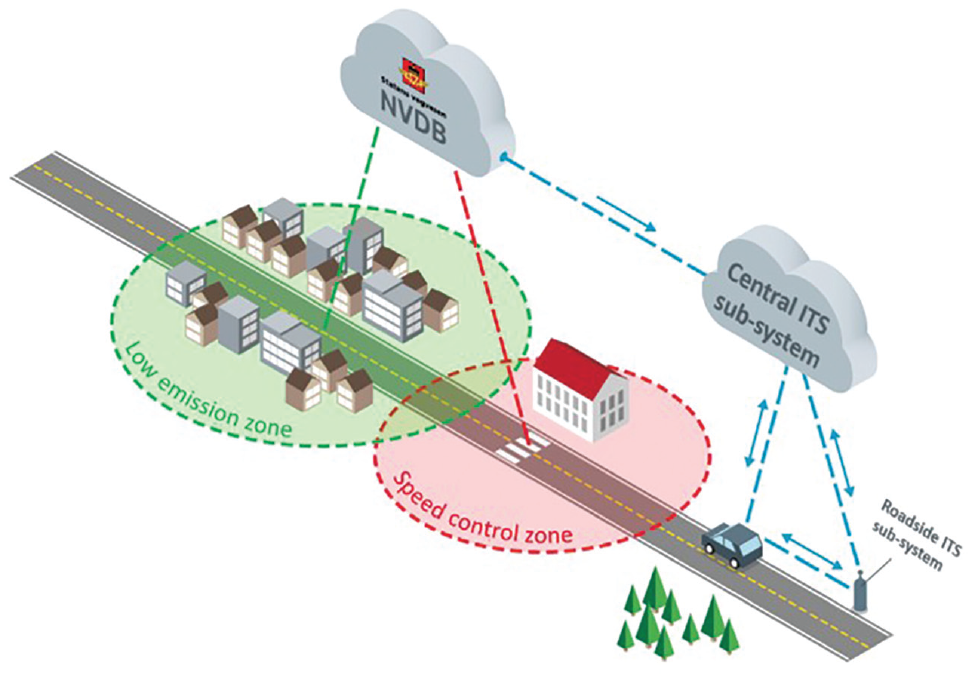
Use of geofence and C-ITS in the two ITS-services to be piloted in GeoSUM. The green zone indicates a low emission zone, while the red zone illustrates a school zone.
This paper focuses on the LEZ pilot. An LEZ can be used as a tool to achieve a rapid reduction in air pollution in city centers, by rewarding the use of low- and zero-emission fuels, or by charging a higher fee for using high-emission fuels. By combining LEZs with geofencing technology and C-ITS, appropriate actions can be implemented quickly to control and inform traffic, without the need for expensive and rigid infrastructure such as tolling stations. Operating LEZs in combination with geofencing technology is also a particularly relevant topic from a policy point of view because one can easily implement various restrictions, for instance based on air quality indicators, where vehicles producing more pollution (typically older vehicles) pay higher fees or are prohibited from entering certain areas.
In the GeoSUM pilot of LEZs, plug-in electric hybrid vehicles (PEHV) are of particular interest since drivers of these vehicles can choose whether to run on electric mode within an LEZ; in the future, the vehicle might even be mandated to run on electricity and thereby also be charged a lower fee. In addition, PEHVs are exempt from paying various fixed fees in the Norwegian charging system. These cars are therefore relatively cheaper than cars with petrol or diesel engines and are thereby one of the best-selling vehicle types in Norway ( 1 ), making Norway a perfect test area for this study.
The GeoSUM project is a collaboration between the Norwegian Public Roads Administration (NPRA), the private partners Volvo and Q-Free, with the Norwegian University of Science and Technology (NTNU) and the research organization, SINTEF, as research partners ( 2 ).
Literature Review
LEZs have already been implemented in several European cities, and the number of such zones continues to increase. For instance, in London, the LEZ covers most of greater London for heavy goods vehicles and has been in place since 2008, while a new ultra low emission zone (ULEZ) was implemented in 2019, implying that drivers of vehicles not meeting the ULEZ emission standards must pay a daily charge to drive within the zone ( 3 ).
The most common technical solution for control and enforcement of LEZs remains automatic number plate recognition (ANPR). ANPR makes it possible to control most of the vehicles entering and leaving the zone, but its efficacy depends on the number of cameras installed and the ability of these cameras to recognize the number plates. Some cities still use manual systems based on stickers and tags. A challenge with the manual control system is that only a limited sample of the vehicles is checked. Several academic studies use the geofencing technique on the use-case tolling. Nagothu ( 4 ) suggests an architecture for how to use geofences for tolling purposes using the GPS-coordinates of the toll plaza. Each vehicle is identified uniquely by SIM or GPRS, and the vehicle’s owner is notified of the fee by SMS or email. No empirical test of this architecture is included in the paper. Pierce ( 5 ) suggests a mileage-based user fee application, were the combination of on-board units (OBU) and geofence could be used to establish locations where the active fees change. Again, the paper does not include any empirical testing of this application. A framework for Time Distance Place (TDP) charging of road pricing is suggested by Matheson and Smith ( 6 ), where a geofence can be used to identify the geographical boundaries, but this scheme has not been tested empirically. In 2017, a proof-of-concept for geofencing in LEZs was conducted by the NPRA and Volvo. In this test, geofences were generated to force a PEHV Volvo car to use electric mode within defined zones ( 7 ).
The lack of empirical testing is a recurrent drawback for many studies related to geofencing in transport applications; the focus has rather been on algorithm development, architecture, requirements, and methods for tolling with geofencing ( 8 – 13 ). Sorasen and Lykkja ( 14 ) provide an overview of using GNSS technology for road user charging, including tolling schemes, enforcement regimes, and a summary of implemented and planned GNSS tolling systems. The study concludes that such systems would realistically be most suitable for heavy goods vehicles. Published empirical studies include the tolling system with virtual gantries implemented in Slovakia ( 15 ) and a GNSS-based charging framework using two geofences in the city of Swindon, UK ( 16 ). In the latter experiment, inner and outer charging zones are defined, and an OBU notifies the driver when they are driving within the charging zone (with a solid light) or near to it (with a blinking light).
The literature review did not uncover any prior studies where differentiated road user charging in LEZs was performed and documented using geofencing technology; the GeoSUM project will therefore constitute a novel contribution to the field. Furthermore, testing hybrid vehicles enables us to study quantitative data on individual behavioral changes with respect to driving mode, which is also a new addition to this research field. We differentiate pricing based on type of energy (gasoline or electricity) used within LEZs, and document user behavior changes and attitudes toward such a solution. While technical tests of entering/leaving and measuring behavior within geofences have been conducted in other studies, we conduct user-focused surveys to evaluate the acceptance and attitudes toward such a system in Norway.
Methods and Pilot Implementation
Distance and Usage-Based Road User Charging in LEZs
In GeoSUM, pilots for user payment in LEZs are based on distance traveled and fuel type used in geofenced zones. The pilots in the GeoSUM project differ from the current city center toll systems in Norway, which are based on vehicles passing through installed turnpikes. Today’s solution implies that roughly half of the local traffic in Oslo avoids paying tolls because the vehicles do not pass through turnpikes ( 17 ), which constitutes an obvious drawback.
The aim of the GeoSUM project is to assess the advantages and disadvantages of using geofence zones for distance- and fuel usage-based road user charging in LEZs. Not all cars are equipped with the software required for using geofencing, and deploying a tolling scheme based on geofencing technology would require a retrofit installation on a potentially large share of the vehicle fleet. Such a retrofit solution therefore needs to be thoroughly tested and validated to ensure that the technological solution will work universally. In the experiments conducted in this project, the retrofit solution was developed by Q-Free and is intended to influence user behavior, that is, to incentivize drivers of hybrid vehicles to switch driving mode when entering a LEZ.
Test Set-Up
Throughout the GeoSUM pilots, we collect information on travel patterns and fuel types, which can be used as the basis for road user charging. Since the pilots are experimental and based on voluntary participation, we cannot implement a scheme where users are charged by the authorities. Nevertheless, the aim is to investigate behavioral changes, and we therefore designed a reward scheme for the drivers. This entails each participant being allocated an initial 1,000 Norwegian Krone (NOK, roughly €100) on starting the experiment as an incentive (1,000 NOK is the maximum amount of money that is allowed as compensation for research projects in Norway). This amount gradually decreased each time the participant failed to switch to electric mode while driving within a LEZ during the six-week pilot period depending on the distance driven within the LEZ and only the remaining amount was awarded to the participants at the end of the pilot.
Because of the maximum allowed compensation and the length of the test, this charging/reward scheme was developed solely for the pilot and it cannot be assumed to reflect accurately the effects that would be achieved in a real charging scheme. The pricing system was designed so that a user consistently failing to switch to electric mode in the LEZs would end up with a balance of 0 NOK. This was calculated using the estimated number of trips and the average length of trips, which were obtained from regional travel surveys covering the areas being studied. To simulate the effects of implementing zones with differentiated pricing, we partitioned the cities of Trondheim and Oslo into two and three zones, respectively, where zones closer to the city center were assigned higher pricing. In Trondheim, the fee for the outer LEZ was set at 3 NOK/km and the inner LEZs were set at 6 NOK/km. In Oslo, the fees for outer, middle, and inner LEZs were set at 2, 4, and 6 NOK/km, respectively (see Figure 2). Driving on electric mode entailed no fee, regardless of zone. The LEZs were stored in the National Road Data Base (NVDB, https://vegkart.atlas.vegvesen.no/) in Norway, and read by the OBU back-office system. Both cities currently have toll stations installed around the city centers; Oslo has three such tolling rings in place, whereas Trondheim only has one. The cost of passing through one of these tolls ranges from 10 NOK to 30 NOK. Our geofence zones were designed to roughly follow these toll borders.
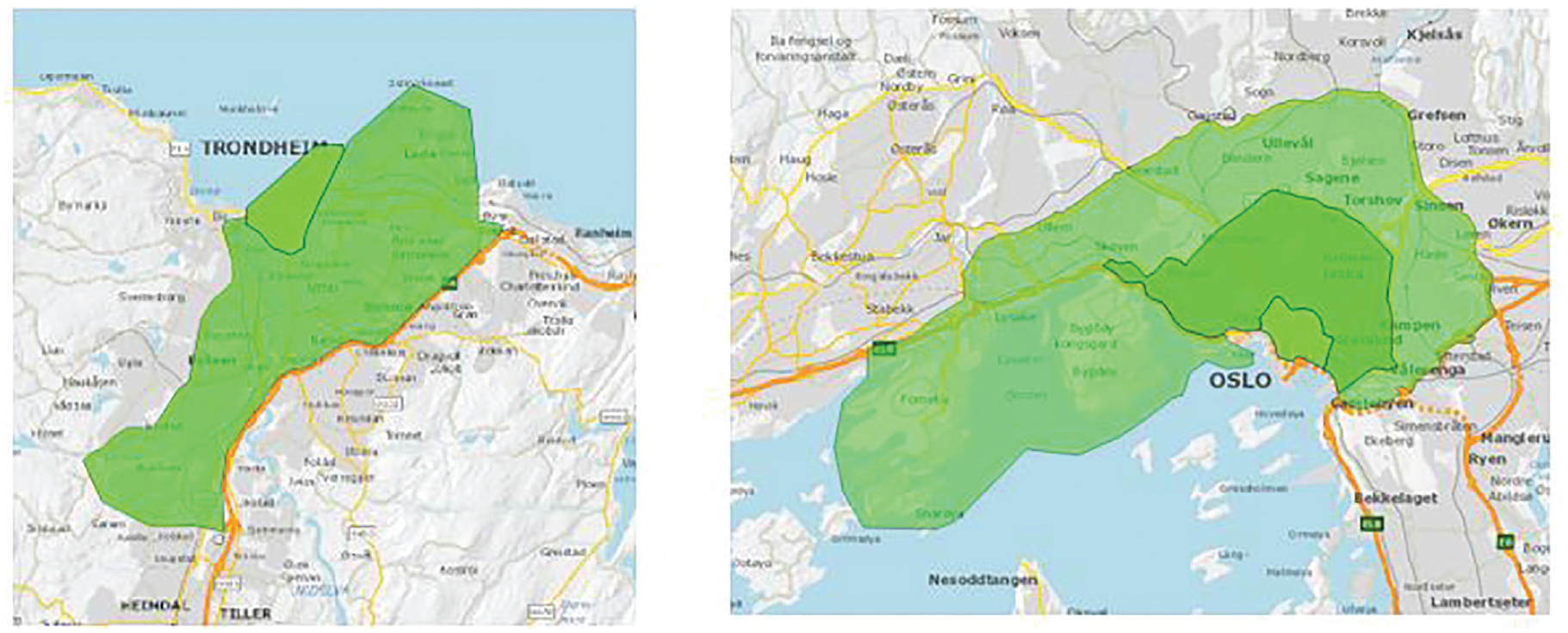
The LEZs in use. Stronger shades of green indicated higher price driving on fossil fuel.
The pilot participants were selected so that their place of work or residence lay in the vicinity of the geofence zones, to ensure that all drivers were switching zones regularly and so were forced to make a deliberate choice of driving mode when entering an LEZ. The pilot was installed from September to October 2019 and conducted in October and November.
The retrofit solution consisted of an external OBU (smartphone) with GPS, connected to outputs from OBD-II via Bluetooth, retrieving zone information from NVDB, and communicating with the driver through the display, as illustrated in Figure 3. The HMI in the LEZ pilot was based on a map where the zones were marked, and where the driver could see the position and movements of the car, as shown in the Figure 3, b and c . The LEZs are shown with green frames and a light green shading. The vehicle is pictured in blue when it is located outside an LEZ and in green when it is running on electricity inside an LEZ. Furthermore, a vehicle driving on fossil fuel within an LEZ is shown in gray. The cost of driving (per km) on the two different fuel types (electricity or fossil fuel) is displayed in a pop-up window. On swithcing off the vehicle ignition, a summary, or trip report, is provided to the driver (Figure 3d). This report comprises information such as total cost of the last trip undertaken, time spent, and distance driven within each LEZ, a map of the driven itinerary, and so forth.
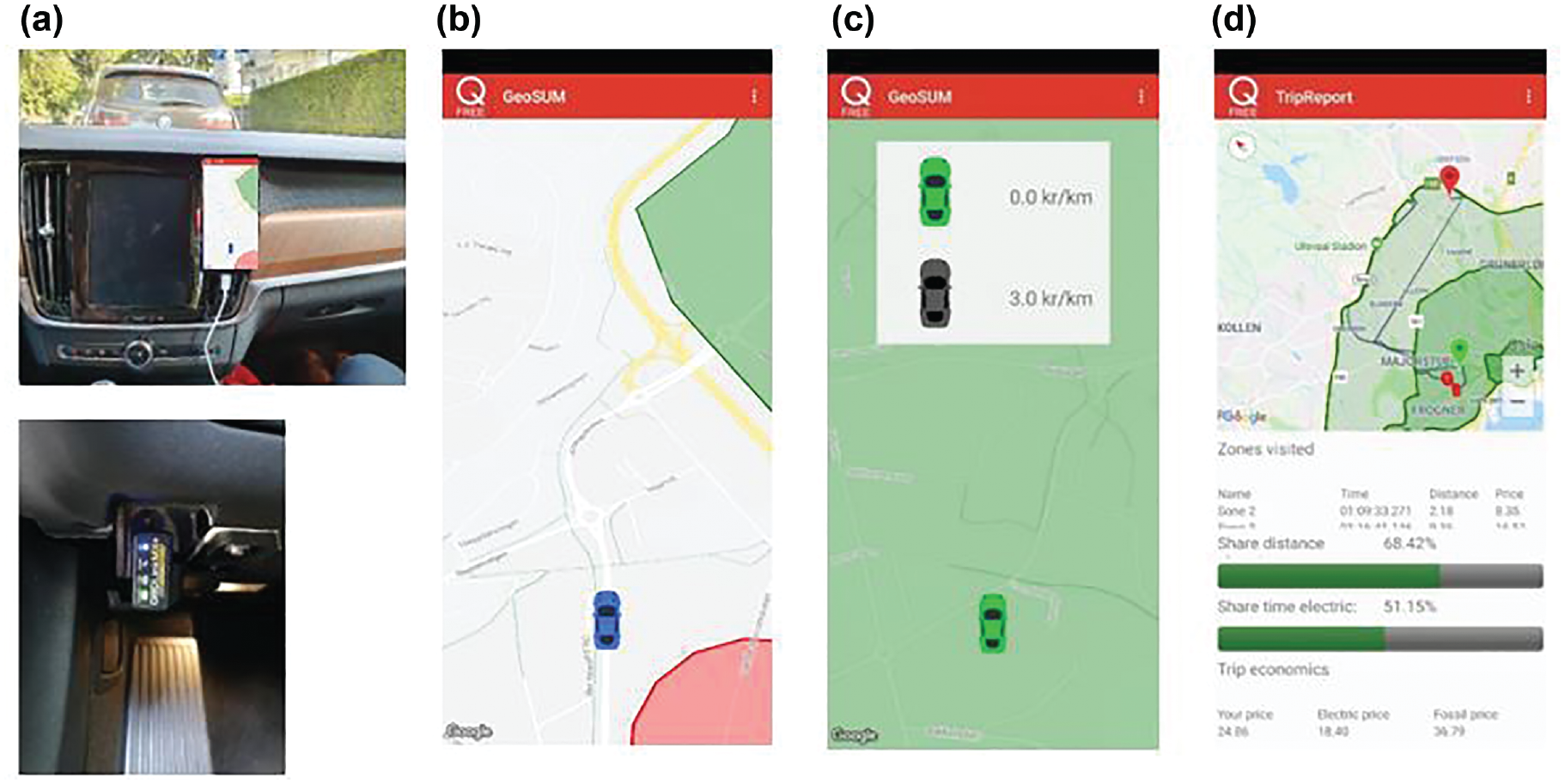
(a) A smartphone running the GeoSUM application connected to OBD-II via Bluetooth; (b) a vehicle approaching LEZ; (c) a vehicle inside the LEZ; and (d) a trip report.
The pilot began with participants driving for two weeks with the HMI turned off, referred to as the “black mode period.” During this period, data was collected but no information about the location of the LEZs or prices was given to the drivers. Participants then entered the six-week “live period,” during which the pricing system was operational, and the drivers were actively participating in the experiment.
Both pre- and post-test questionnaires were filled in by the participants, gathering information such as user background, attitudes, and satisfaction. Selected questionnaire results relevant to the use of road user charging in LEZs are presented in this paper to support and give context to the findings from the technical evaluation.
Results
The pilot involved a total of 75 participants driving privately owned PEHV vehicles, including 30 vehicles in Oslo and 45 in Trondheim. Some vehicles were registered as having two participating drivers. To differentiate between drivers, participants were required to log in to their individual profile before commencing a new trip. In relation to vehicle types, Volvos and Mitsubishis made up the majority of the participating vehicles with 20 each, followed by VW (four vehicles) and Mercedes (two vehicles). In sum 75 participants were distributed between 46 vehicles, that is, 29 vehicles had two drivers.
The two test periods (black mode period and live period) resulted in 7,767,143 and 25,677,621 data points, respectively. Each data point included information such as GPS-position, whether the vehicle was inside an LEZ, current fuel type in use, and so forth, and was usually collected twice per second. A post-processing procedure was performed to filter out inconsistent GPS data and duplicates as well as removing drivers with insufficient amounts of participication (see below), which resulted in a total distance driven by all participants close to 30,000 km. The amount left for pay-out to the participants ranged from about 400 NOK to very close to 1,000 NOK (the maximum possible).
Figure 4 summarizes the driving modes in the black mode and the live mode periods for the two pilot cities. The data is based on 21 participants from Oslo and 33 from Trondheim. Other participants were not included as they did no or very little driving during either the black mode or the live period, which was defined as less than three trips undertaken during each period.
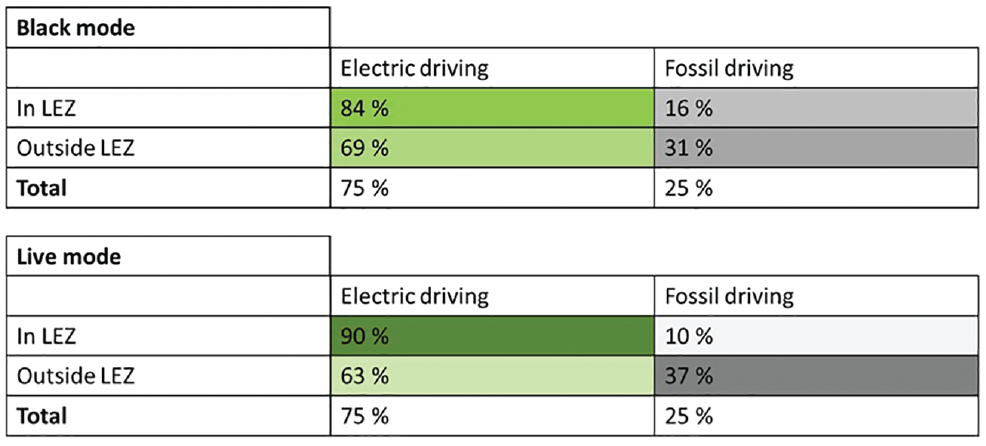
Result from comparing the amount of electric driving in black mode and live mode in Oslo and Trondheim (54 participants).
The data indicate a higher share of electric driving inside the LEZs during the live period (90%) compared with the black mode period (84%). We note that the share of electric driving in LEZs is also substantially higher than outside LEZs during the black mode period. This could be because trips occurring in city centers are typically shorter than those undertaken outside, which leads to PEHV vehicles automatically opting for electric mode, while longer trips outside city centers are less suited for electric mode. We also note that the total share of electric (75%) compared with gasoline mode (25%) is the same for both periods, which entails drivers effectively reassigning a portion of the electric driving to the LEZs.
We found a discrepancy between the total amount of driving in each zone between the two periods, with 35% of the total distance driven occurring inside an LEZ during the black mode compared with 42% during the live period. One possible explanation for this is that the black mode period coincided with a week of school holidays, during which some of the participants (typically parents) also take holidays, resulting in fewer trips in and out of the city center and longer trips in the countryside (i.e., outside of LEZs).
To fully assess the effect of the pricing scheme and the increase of electric driving within LEZs (from 84% to 90%), it is worth putting these results into context with the outside conditions during the pilot. The black mode period began in September, when the outside temperature averaged 10°C, while the live period stretched until November, when average temperatures neared 0°C. Lower temperatures shorten the range of battery-driven vehicles, and PEHVs tend to rely more on the combustion engine in colder weather. It is, therefore, likely that the share of electric driving in black mode would have been lower in LEZs had it also been done in November.
Figure 5 shows the distribution of the 54 participants across gender and age. We note that most participants are male and above the age of 40. The latter point could be for two reasons. Firstly, younger generations increasingly abstain from owning and driving private vehicles in favor of other transport modes or car-sharing alternatives. Secondly, PEHVs remain relatively expensive, which makes them less attractive for younger drivers on tighter budgets.
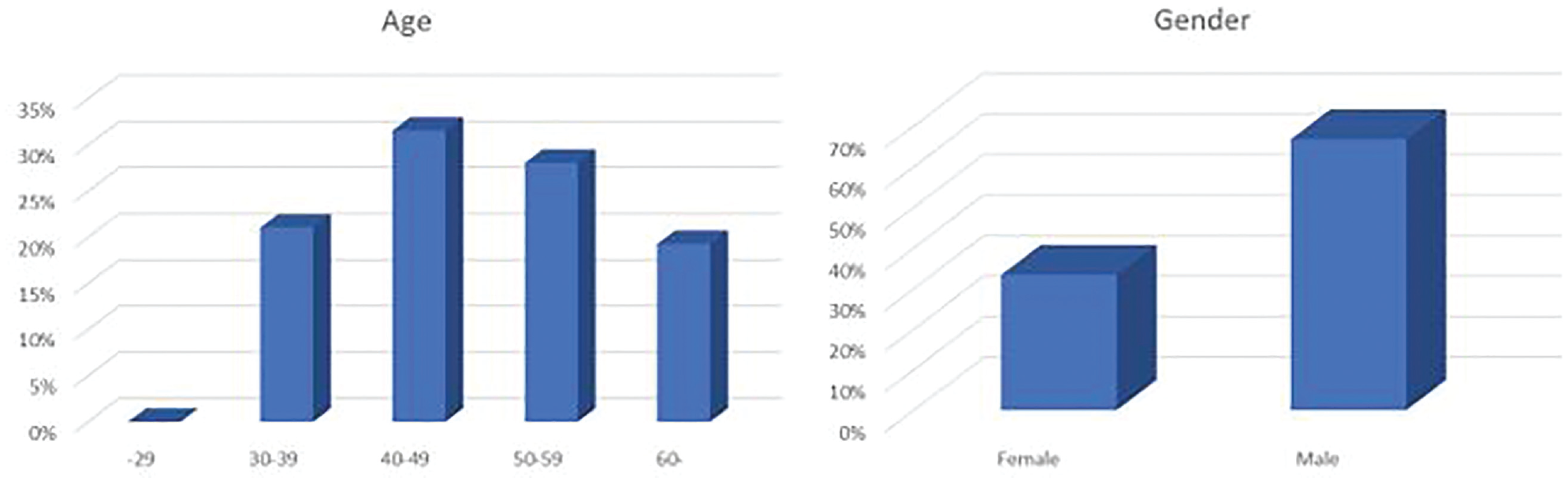
Participants by gender and age group.
Several questions concerned the participants’ perceived fuel/electricity usage and charging habits, such as the example shown in Figure 6, where participants were asked to estimate how often they were driving on electric mode. The results indicate that the participants had a relatively sound perception of their driving habits, with the majority of respondents estimating their electric use between 60% and 80%, compared with the 75% reported empirically in Figure 4. It must, however, be noted that many of theses vehicles provide the drivers with statistics related to driving modes.
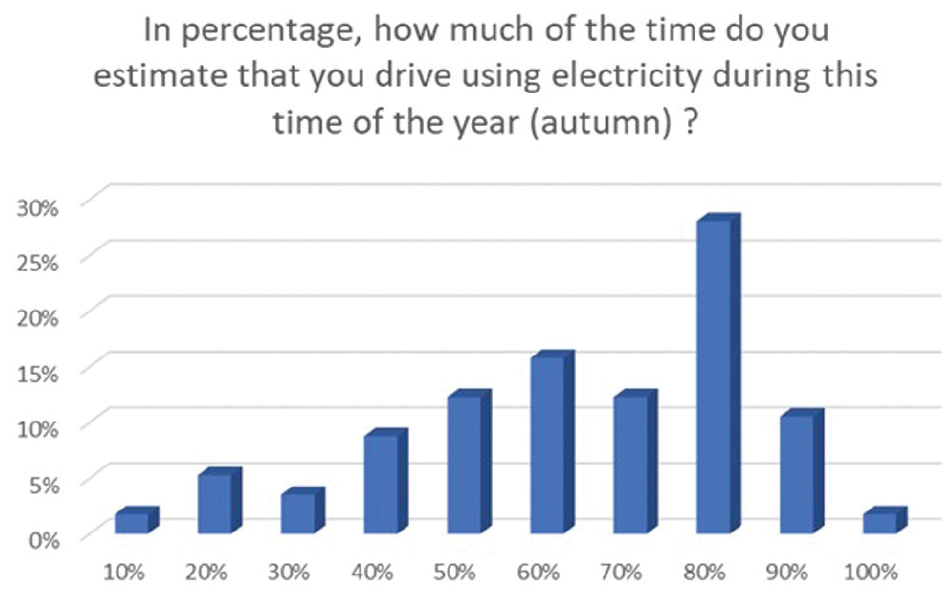
Perceived usage of electricity.
Furthermore, we found that most participants charged their vehicles daily, which concurs with driving on 60% to 80% eletricity overall, considering that PEHV vehicles have a maximum of 30–40 km driving range in pure electric mode.
In the post-test questionnaire, participants were asked how they would react if the suggested pricing scheme were to be implemented. See Figure 7. In essence, the two questions are largely the same, with the second putting more emphasis on the fact that switching driving mode would be financially beneficial, which leads to a greater share of drivers leaning toward electric driving in LEZs. This underlines the need for additional incentives to bring about a change in drivers’ habits.
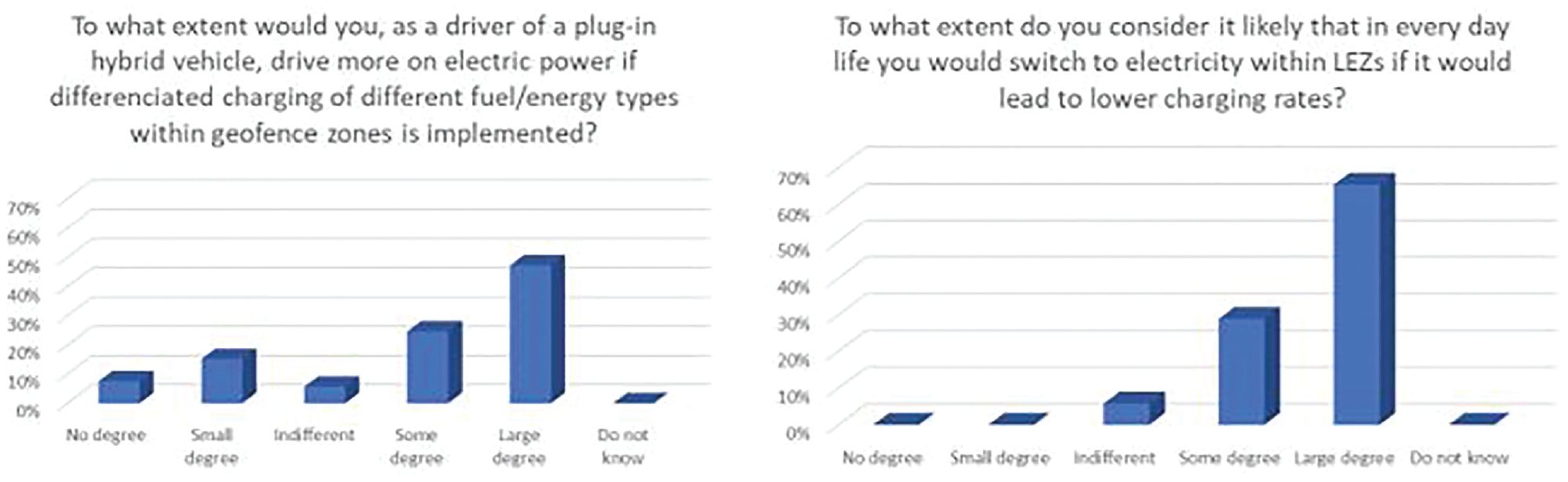
To what extent do the participant believe that they would use more electricity if this system were to be implemented.
Moreover, the participants were asked to evaluate the fairness of the proposed pricing system compared with the current tolling scheme. As shown in Figure 8, participants deemed that a system based on distance driven and fuel type used would be fairer than a uniform arrangement such as stationary tolling stations on the road network.
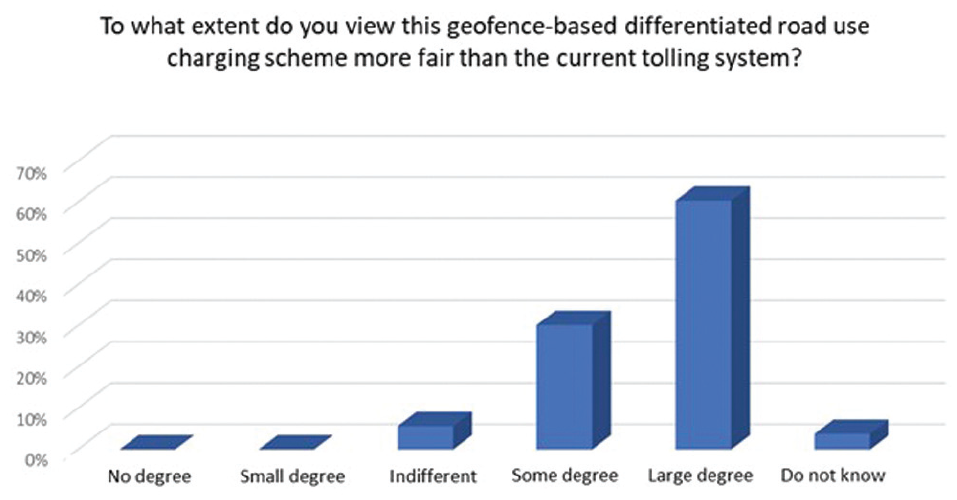
Participants’ opinions on the fairness of the system.
When implementing a distance-based road user charging system, and especially when it involves differentiating factors and dynamic pricing, providing relevant information to the drivers is key. Installing a retrofit solution such as the smartphone and OBD2 system used in this pilot entails additional requirements in relation to HMI traffic safety; design and robustness of the system are two of several important factors that need to be considered. Based on the experience with the retrofit system used in the pilot, the participants were asked to consider four types of system for a permanent HMI solution, summarized in Figure 9.
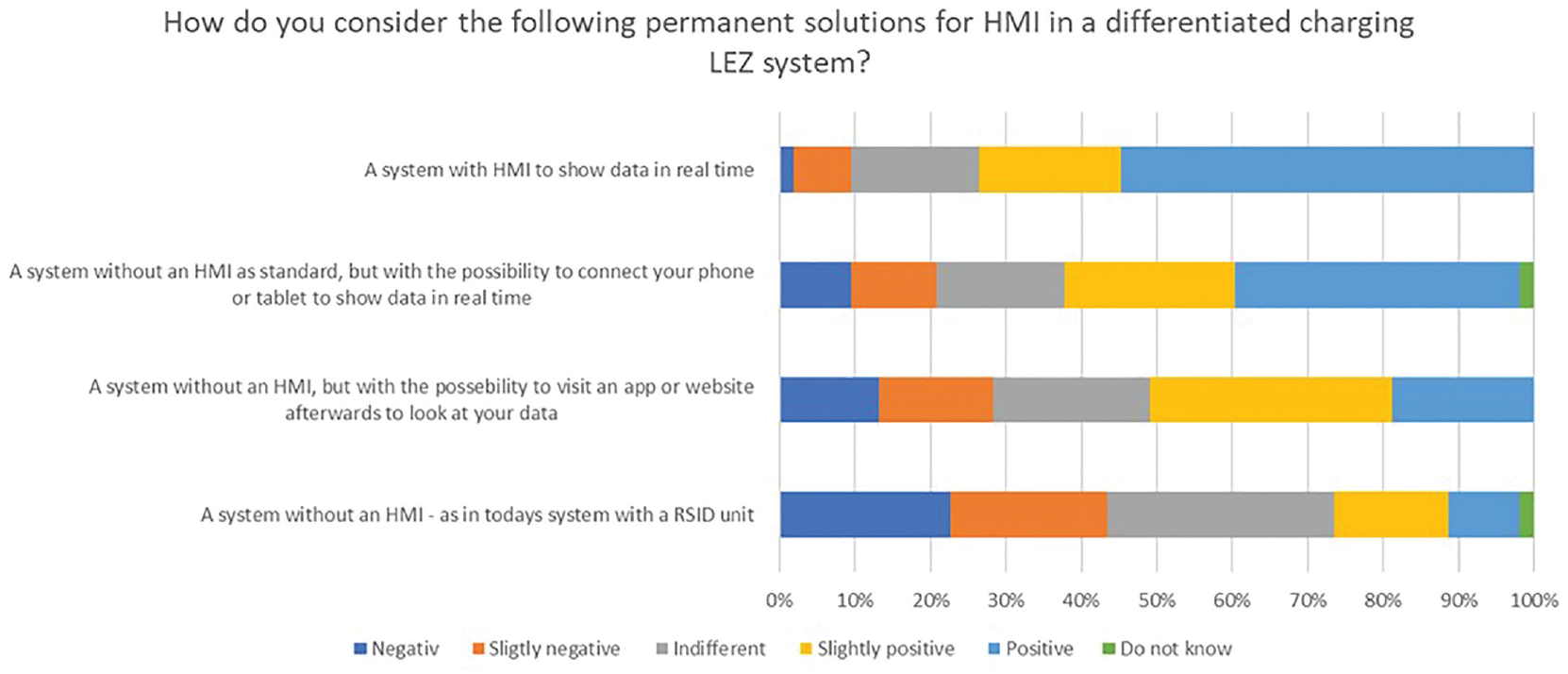
Evaluation of suitability of diffent HMI solutions as a permanent solution.
Figure 9 reveals that participants value a system providing as much real-time information as possible. Most participants asserted that the installed HMI did not constitute a distraction, which opens the possibility of adding more functionality to the HMI. However, screens and interactive systems are expensive, and when evaluating a full implementation of such systems, cost remains a key element. When participants were asked if they would be willing to pay for the additional information provided by the system, perspectives change, as shown in Figure 10. This indicates that participants do value a distance-based road pricing scheme, but are not necessarily willing to, nor necessarily see enough usefulness in, paying for a live HMI solution.
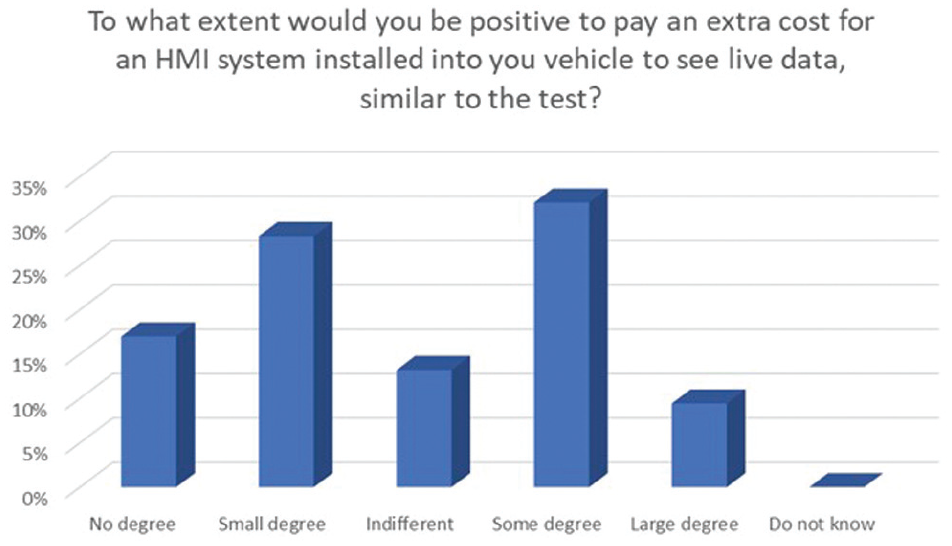
Willingness to pay for the suggested HMI system.
Concluding Remarks and Further Work
The tolling system in Norway rewards drivers of electric vehicles by providing no fee or heavily reduced fees at tolling stations. However, no differentiated charging currently exists for PEHVs. This study has revealed that drivers of PEHVs, which do drive a significant amount of the time on electricity, find the current system unfair. The GeoSUM pilot described in this paper has shown that economic incentives can lead to drivers of PEHVs adapting their driving habits so that they opt for pure electric driving mode within predefined LEZs, which would help to improve the air quality in city centers and which arguably supports the view that they ought to be eligible for the same reduced fees as drivers of electric vehicles. By taking simple proactive steps such as charging the PEHV daily and saving the electric capacity for LEZs, the participants have demonstrated that it is feasible to abstain from using fossil fuels within LEZs. Results from the questionnaires show that most drivers of PEHVs would be willing to take the required steps if they would indeed be granted the same benefits as drivers of electric cars.
Future work on this project will entail deeper analysis of the answers to the questionnaires, particularly focusing on the changes in attitude, before and after the pilot, toward, for example, HMI and other geofence applications. These results will be correlated and analyzed along with the collected technical data. Furthermore, the recently proposed standard “Controlled Zone management using C-ITS” ( 18 ) should be evaluated with respect to the system, which could facilitate the eventual implementation of the system. Finally, a crucial continuation of the GeoSUM project will be to set the results into the broader societal context and analyse the potential benefits (and drawbacks) for society.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Petter Arnesen, Hanne Seter, Ørjan Tveit and Mats Bjerke; data collection: Petter Arnesen, Hanne Seter and Mats Bjerke; analysis and interpretation of results: Petter Arnesen and Hanne Seter; draft manuscript preparation: Petter Arnesen, Hanne Seter and Ørjan Tveit. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is founded by the Norwegian Research Council, project number 283431.