
Abstract
In a fully connected traffic environment with automated vehicles, new traffic control strategies could replace traditional traffic signals at intersections. In recent years, several studies about reservation-based intersection control strategies have been published, and a significant increase in capacity was shown. In the strategies presented so far, other road users usually play a minor role or are not considered at all. However, many use cases of automated driving occur in urban environments, where pedestrians and bicyclists play a major role. In this paper, a novel strategy for integrating pedestrians into automated intersection management is introduced and compared with a fully actuated traffic (AT) signal control. The presented control consists of a first-come, first-served strategy for vehicles in combination with an on-demand traffic signal for pedestrians. The proposed intersection control is explained, implemented, and tested on a four-leg intersection with several lanes coming from each direction. It dynamically assigns vehicles to lanes, and vehicles follow a protocol that enables cooperative lane-changing on the approach to the intersection. Demand-responsive pedestrian phases are included in such a way that predefined maximum pedestrian waiting times are not exceeded. A set of demand scenarios is simulated using a microsimulation platform. The evaluation shows that the presented control performs significantly better than the AT control when considering low, medium, and high traffic demand. Pedestrian waiting times are slightly improved and at the same time vehicle delays are substantially decreased. However, the control needs to be improved for scenarios with a very high vehicle demand.
Continuous development of in-vehicle sensors along with vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications has had a significant impact on the increase of automated driving functions. Connected and automated vehicles (CAVs) have a great potential to improve future traffic safety and increase traffic capacity. This potential does not only come from shorter reaction times and decreased following distance, but also from the possibility of developing new traffic control strategies ( 1 ). Current traffic control strategies, especially at intersection zones, are designed to accommodate human driving behavior. Therefore, intersections are currently managed by traffic signals and stop signs. Traffic signals alternate the right of way of different road users (e.g., cars, public transport, pedestrians) to coordinate conflicting flows. Depending on the traffic demand, traffic signals can be inefficient and long waiting times can occur. Additionally, at signalized intersections, vehicle turning movements represent a considerable safety problem to pedestrians ( 2 ) which could be alleviated with a future use of CAVs.
In recent years, several intersection management schemes for a penetration rate of 100% CAVs have been proposed ( 1 , 3 , 4 ). Most of these management strategies include a centralized control unit or intersection manager that provides each approaching vehicle with a conflict-free trajectory. The idea was analyzed in several research papers and a significant increase in capacity was shown ( 1 , 3 ). Different newspapers took on the concept, presented these simulations and envisioned a “future without traffic signals” ( 5 ). However, in contrast to traditional traffic signals, other road users such as human-driven vehicles, pedestrians, and bicyclists are usually not considered in these intersection control strategies. Pedestrians and bicyclists play an important role, especially in urban transportation. In Germany, non-motorized traffic has a share of 33% among all transportation modes considering trips, and a share of 6% considering traveled person kilometers ( 6 ). In the U.S.A., walking and bicycle trips account for 11.5% of all trips undertaken ( 7 ). In relation to current climate and air quality challenges, the level of service for these emission-free modes of transportation should not deteriorate when CAVs enter the operations.
This paper briefly describes other relevant studies about this topic and introduces a new control strategy for integrating pedestrians into a demand-responsive automated intersection control. The core of this new, pedestrian-friendly strategy is a defined maximum waiting time for pedestrians, which must not be exceeded. The control algorithm builds on strategies that were previously developed by the authors and tested on a small intersection ( 8 ). In this paper, a major urban intersection with several lanes from each direction is simulated using the microsimulation platform aimsun.next. To the best of the authors’ knowledge, this is one of the first studies to evaluate and compare pedestrian operations in a futuristic automated environment with traditional pedestrian operations. The main objective is to present, implement, and evaluate this novel strategy which is compared with optimized fully actuated traffic signals for a set of different traffic demand scenarios.
The remainder of the paper is organized as follows. The second section gives an overview of related literature. In the third section the considered intersection and the control strategies for approaching vehicles and for the pedestrian signal are presented. The simulation specifications and demand scenarios are explained in the fourth section. In the fifth section the results of the study are shown, and in the final section conclusions and future research are given.
Literature Review
Several approaches to so-called cooperative or autonomous intersection management (AIM) have been proposed by authors coming from different fields of research. A good overview of the methods and assumptions is given by Chen and Englund ( 4 ). Most of the strategies consider passing through an intersection as a problem of discrete resource allocation where the objective is to allocate time slots and intersection space to vehicles for safe and efficient intersection passing. Two major types of AIM can be distinguished: centralized AIM involving an intersection controller and distributed AIM where the right of way is negotiated directly between vehicle agents following a certain protocol. While distributed AIM requires less infrastructure support and is more robust in relation to failures, a centralized intersection control unit can facilitate the negotiation process and optimize the efficiency of the intersection ( 4 ). The central intersection controller communicates with all approaching vehicles and receives relevant information from them, for example, origins, destinations, and earliest arrival times at the intersection. The control unit then allocates discrete space–time cells to approaching vehicles and sends them their assigned time slots or even an exact trajectory that they need to follow to cross the intersection without conflicts. The first notable implementation of reservation-based AIM was presented by Dresner and Stone ( 1 ). It has been followed up by several studies addressing similar concepts (e.g., 9 , 10 ). Most of these approaches use a first-come, first-served (FCFS) strategy, but there are also some that propose different serving priority strategies, for example, in combination with economic incentives ( 11 , 12 ), with platoon-forming ( 13 , 14 ), or with a redefinition of lane assignment and lane direction ( 15 ).
AIM approaches usually focus on vehicle traffic, while the other road users are not taken into account in the studies presented above. Dresner and Stone presented an extension of their AIM strategy that allows non-connected vehicles as well as pedestrians and bicyclists to cross the intersection safely ( 16 ). However, their approach is not responsive to pedestrian demand and it does not focus on the level of service for pedestrians. This is in line with traffic signal planning; traditional signal timing objectives focus on minimizing vehicle delay and stops, which can lead to long waiting times for pedestrians ( 17 , 18 ). An additional problem when considering pedestrians in the presented AIM systems is that pedestrians are currently not connected to each other, to the other road users, or to the infrastructure. Therefore, their presence and desired destination are not easily predictable and it is not easy to inform them when they are given the right of way. The majority of research and development efforts considering pedestrians at future intersections currently focus on safety issues such as detection and warning ( 4 ). Some studies assume that pedestrians are going to be connected via mobile devices in the future ( 19 , 20 ). While this enables enhanced safety features, for example, through collision warnings, it cannot be assumed that everybody on the road will be connected and sending information about position and destination. The reasons for this opinion are the existence of privacy concerns and an unacceptable shift of responsibility from cars and drivers to the vulnerable road users. These concerns are also shared by others, see for example the responses from a recent survey of bicyclists ( 21 ). However, in this study, it is assumed that it is possible to include pedestrians in a demand-responsive intersection management system because they can be detected when they are present at the intersection. This is already technically feasible; the primary current detection mechanism for pedestrians is the use of pedestrian push buttons. In the last decades, automated detection technologies have been suggested as an alternative way to detect pedestrians, and some of them, including infrared, microwave, and image processing technologies, show promising results ( 22 ). Besides detecting pedestrian presence, these technologies can also capture the number of waiting pedestrians, track pedestrian movements on the street, and extend the crossing time (if necessary) ( 18 ). If pedestrians do not use a mobile device, they still have to be notified when they are given the right of way. While there are several approaches on how autonomous vehicles could communicate with pedestrians and display the right of way to them in the future ( 23 ), it is assumed here that bigger intersections (where pedestrians need to cross several lanes) will be equipped with a proper pedestrian signal infrastructure.
In a previous study, the authors presented and implemented a new reservation-based intersection management strategy for a small intersection zone with CAVs and pedestrians ( 8 ). It was shown that there are several ways to include pedestrians into an AIM while ensuring that predefined maximum pedestrian waiting times are not exceeded. Both the pedestrian and the vehicle level of service could be improved as compared with a fixed-time traffic signal control. However, that study considered a very small intersection with only one lane from each direction ( 8 ). While this simplified the development of the introduced control strategies, it also limited the degrees of freedom; vehicles coming from one direction had to enter the intersection zone in the exact order that they had entered the section, independent of their turning intentions.
This paper extends the aforementioned study by presenting an improved control strategy that is implemented and compared with a fully actuated traffic signal on a four-leg intersection with several lanes coming from each direction. The control assigns lanes dynamically and vehicles follow a protocol that enables cooperative lane-changing on the approach to the intersection. Demand-responsive pedestrian phases are included into the control in such a way that predefined maximum pedestrian waiting times are not exceeded and the number of vehicle–pedestrian conflicts (that needs to be resolved) is minimized.
Intersection Control Strategy
In this chapter, the conditions of the considered intersection are introduced along with the implemented control strategies, which are based on a combination of AIM for CAVs and demand-responsive traffic signals for pedestrians.
Example Intersection Zone
To develop and test the implemented intersection control, an example four-leg intersection zone, as shown in Figure 1, is considered. The intersection has a main road with three lanes in east–west directions and north–south minor road approaches, each with two lanes. There are signalized pedestrian crossings at each leg of the intersection. The major road facilitates a pedestrian refuge island, see Figure 1c. For the traditional traffic signal control scenarios, the lane assignment is fixed and relatively restricted as shown in Figure 1a: turning movements are only allowed from the leftmost or rightmost lanes, respectively, and left-turning vehicles have their own lane. This kind of lane assignment is commonly seen in the field and it enhances the safety and efficiency of intersection operations. For the AIM, the lane assignment can be more flexible, and turning movement does not have to be restricted to the side lanes, as conflicting trajectories are resolved by the intersection controller. Therefore, a new lane assignment with all possible turning movements is presented in Figure 1b.
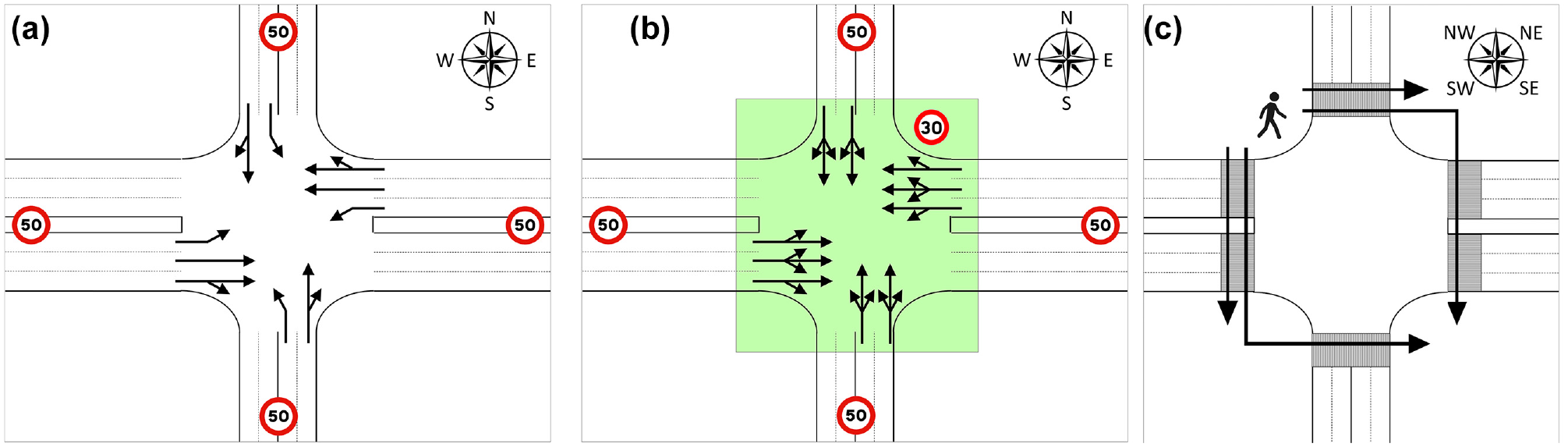
Intersection geometry of considered intersection with lane assignment and pedestrian crossings for different scenarios: (a) lane assignment for the traffic signal control scenario, (b) lane assignment for the automated intersection control scenario, and (c) pedestrian crossings.
It can be observed that the speed in the intersection zone is reduced to 30 km/h for the AIM case. On the one hand, it is important that vehicles enter the intersection with a certain minimum speed to avoid blocking the intersection area for too long. If a vehicle is slowed down when approaching the intersection area, it thus accelerates again before reaching the required speed, see, for example, Niels et al. ( 8 ). On the other hand the speed cannot be too high as the vehicle needs to be able to react to the pedestrian detection system and come to a full stop if necessary. Thus, a speed limit of 30 km/h is a good trade-off between safety (primarily for pedestrians) and efficiency of the traffic stream.
Architecture of the Intersection Control
The intersection control strategy presented in this paper works with a discretization of space and time. Therefore, the considered intersection is divided into several mutually exclusive conflict areas, as shown in Figure 2a. Dividing an intersection into a grid of conflict areas is common when developing AIMs, see for example, Dresner and Stone ( 1 ). In the present case, not only the conflicting movements of vehicles are considered, but also the conflicts between vehicles and pedestrians. This means that both vehicles and pedestrians reserve the cells of the intersection zone that they want to pass through, and only a single vehicle or a group of pedestrians is allowed to occupy a single conflict area at any particular time interval. Thus, approaching vehicles and the pedestrian requests (indicating either pedestrians who want to cross or those who are currently crossing) communicate with the intersection controller as shown in Figure 2b. The intersection controller collects relevant information from approaching vehicles and reserves a time slot for them. When pedestrians arrive at the intersection, the controller schedules a green phase for the requested crosswalk and returns green to the pedestrian signal head. If necessary, vehicles are rescheduled and receive a new time slot. The control calculates speeds for vehicles in such a way that they arrive at the intersection exactly on time. The approaching vehicles communicate with surrounding vehicles to ensure safety gaps and facilitate cooperative lane changing. The following assumptions are made to develop and implement this control strategy:
The dynamic vehicle information (i.e., position, current speed, and turning information) is available as soon as the vehicle enters a range of 300 m from the intersection. This is possible with current state-of-the-art dedicated short-range communication (DSRC) systems ( 24 ). V2V and V2I communication is assumed to be ideal, that is, possible packet loss and latency are ignored.
All vehicles have the same dimensions and dynamic/kinematic characteristics.
Vehicles can communicate with surrounding vehicles and exchange current positions and speed. When adjusting their speed, they follow a protocol that allows for cooperative lane changing.
Pedestrians are detected when they are already at the intersection. Their right of way is displayed to them via pedestrian signal heads.
Pedestrians are assumed to cross the intersection with a walking speed of 1.2 m/s ( 25 ). An additional clearance time is assigned and detection systems ensure that the pedestrian crossing is cleared before a vehicle is allowed to cross. If pedestrians are still on the street, the clearance time is extended. Approaching vehicles are slowed down (and eventually stopped, if needed), and a new slot for crossing the intersection is assigned to them, if necessary.
The default setting of the pedestrian signal is green, that is, if no vehicle is assigned to cross a pedestrian crossing within the next seconds, the corresponding traffic signal shows a green light for pedestrians.
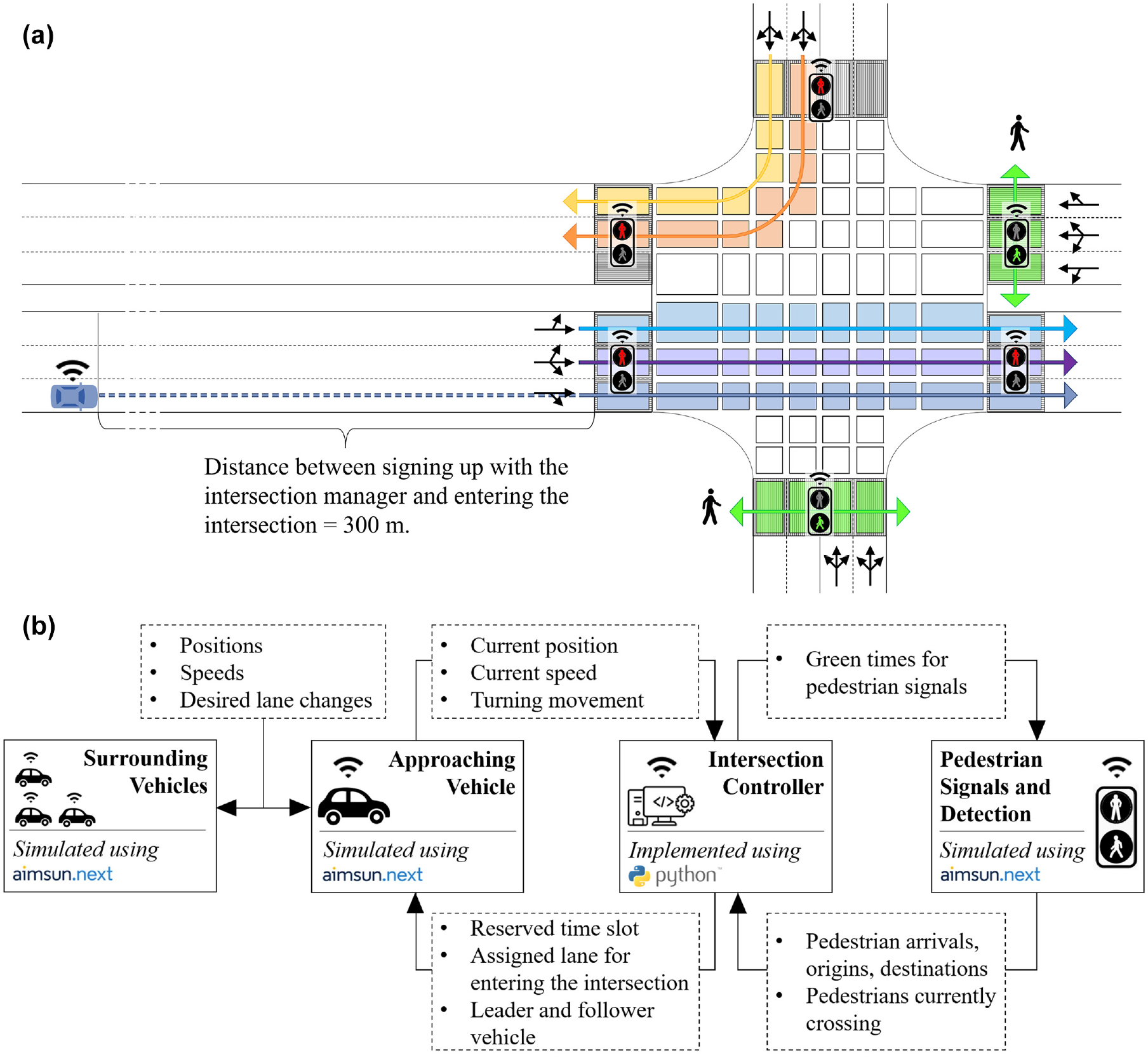
Division of the intersection zone into different cells and presentation of communication between vehicles, pedestrian signals, and the intersection controller: (a) geometry of intersection zone: division into cells and (b) flowchart of intersection control and communication to approaching vehicles and pedestrian signalization.
In the following subsections, the control strategies are explained for approaching vehicles and for pedestrians at the intersection separately.
Automated Intersection Control for Vehicles
In principle, an FCFS policy as explained by Tachet et al. (
13
) is implemented for the intersection shown in Figure 2a. When entering the communication range, each vehicle
In contrast to other AIM approaches, the reserved time slots in this control are subject to change and vehicles can be rescheduled. Reasons for rescheduling the arrival time of vehicle
Because of computational complexity, the intersection controller does not calculate a complete trajectory for vehicles approaching the intersection. Therefore delays can occur if
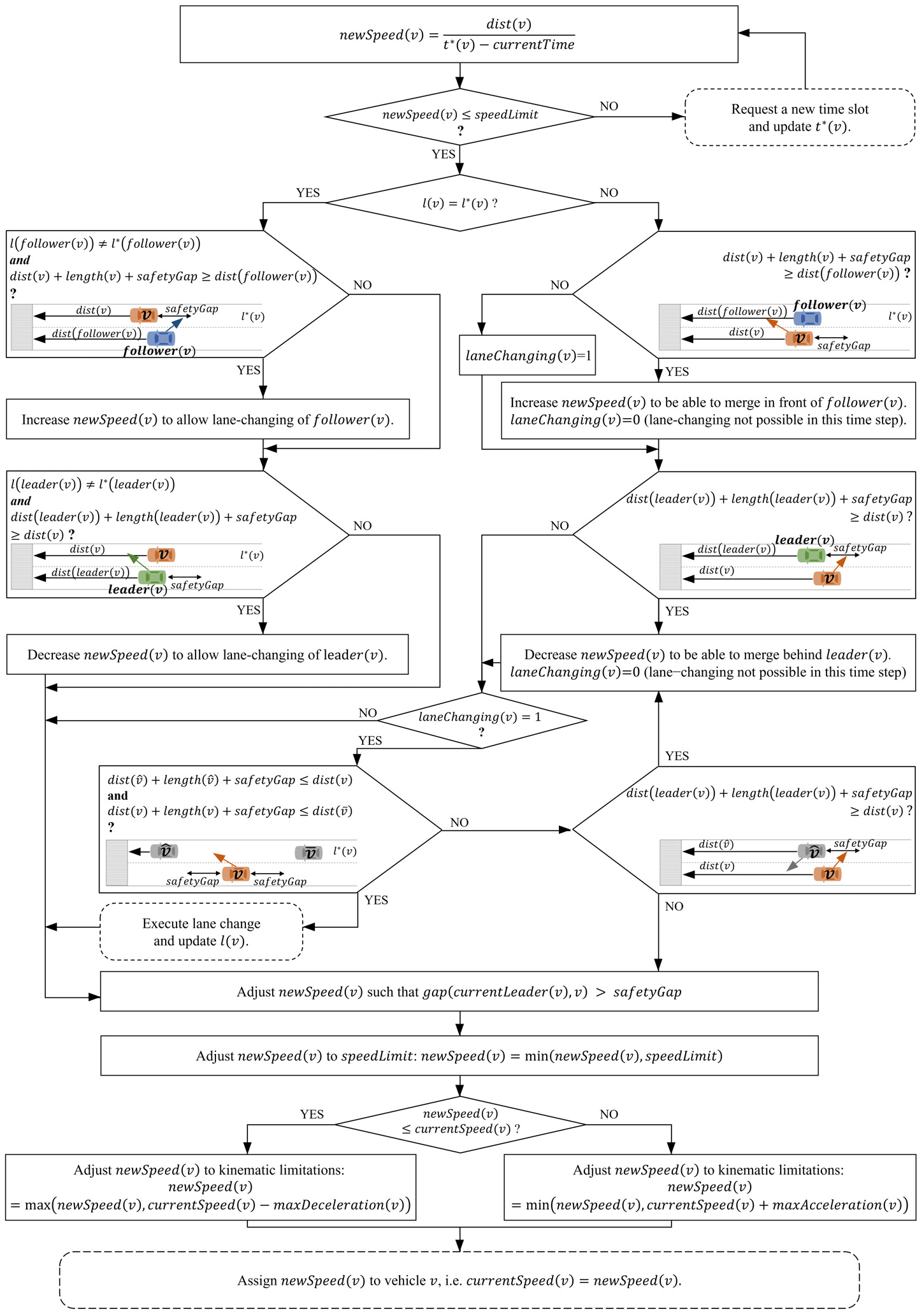
Flowchart for calculating the new speed of vehicle
Even though the lane assignment is flexible, as shown in Figure 1b, it is beneficial that left-turning vehicles use the leftmost lane and right-turning vehicles use the right lane. Turning movements from other lanes lead to a higher number of cell reservations and longer intersection crossing times. Therefore, turning vehicles are assigned to a lane other than their traditional turning lane (left- or rightmost lane, respectively) only if this reduces their delay by more than a defined threshold
On-Demand Traffic Signals for Pedestrians
While a vehicle reserves its time slot for crossing the intersection at least 30 s before its arrival, pedestrians are detected (by the detection system) only when they are at the intersection and ready to cross. Let
Pedestrians Crossing the Minor Road (South or North Approach)
Let
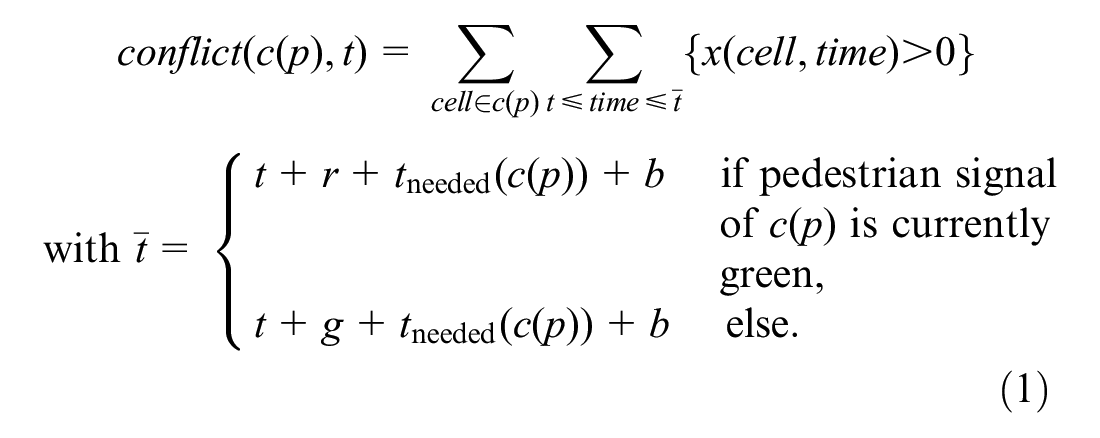
This idea is illustrated in Figure 4a. Note that if the pedestrian signal is currently green, it is not necessary to consider the minimum green time
If there are several time slots with the minimum number of conflicts that fulfill the requirements above, the earliest time slot among them is chosen and reserved for
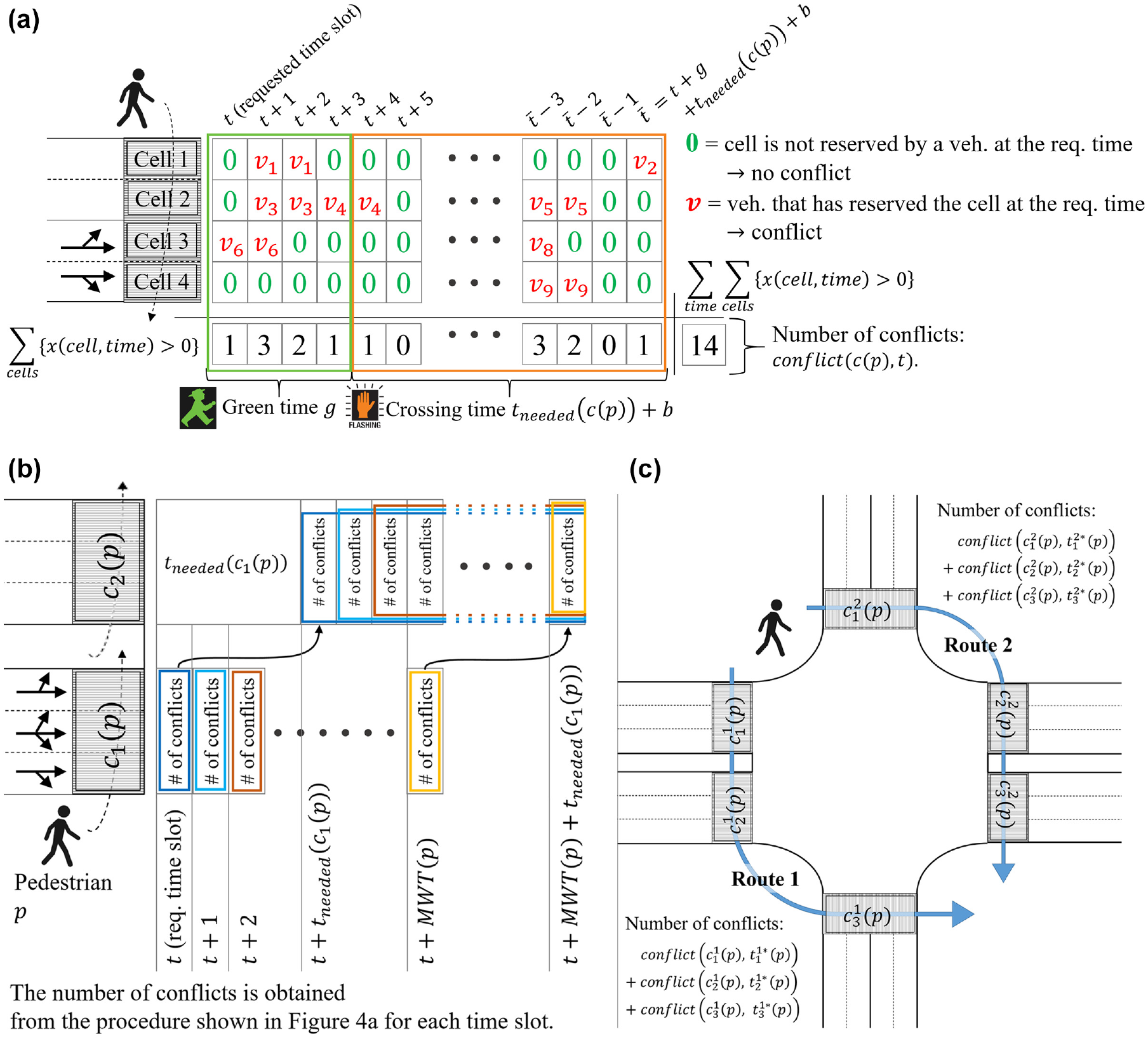
Explanation of the number of pedestrian–vehicle conflicts for different situations: (a) explanation of how the number of pedestrian–vehicle conflicts is derived for a specific crosswalk at a specific time slot, (b) explanation of the number of conflicts if a pedestrian crosses several crosswalks and (c) explanation of the number of conflicts if a pedestrian crosses diagonally.
Pedestrians Crossing the Major Road (East or West Approach)
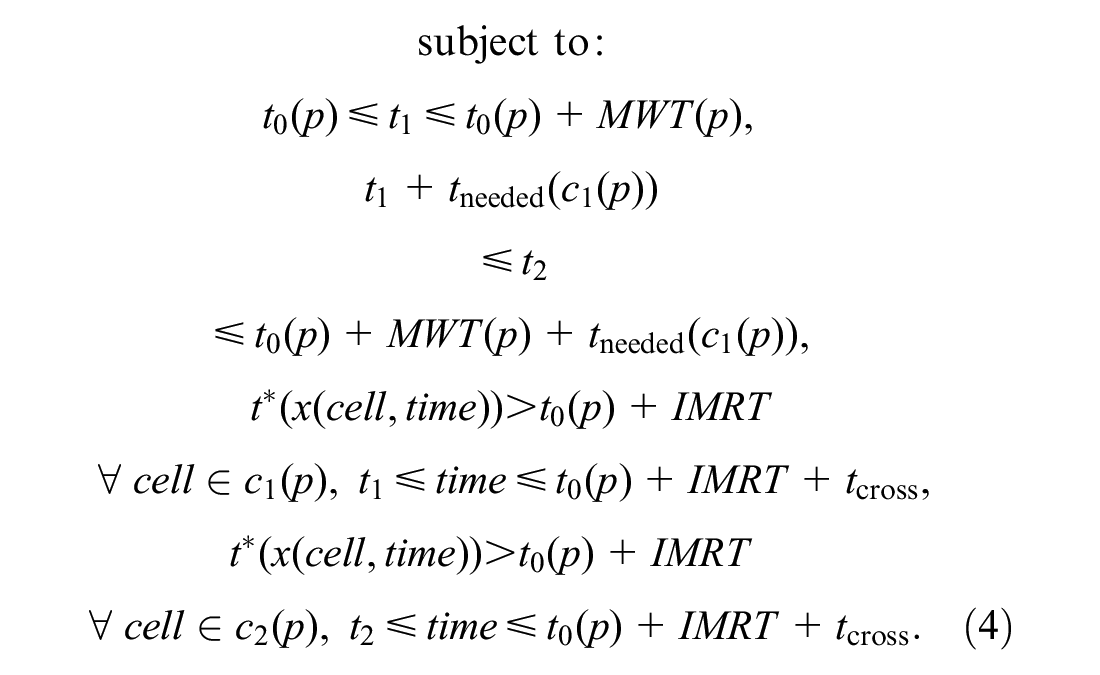
If a pedestrian

Pedestrians Crossing to the Diagonal Corner of the Intersection
Pedestrians who want to cross to the opposite corner of the intersection pass the intersection in two consecutive perpendicular movements. To do so, they can take two routes as shown in Figure 4c. On each route they have to pass three crosswalks. The number of conflicts is obtained by extending Equation 3 by a third pedestrian crossing. Depending on the minimum number of conflicts on each of the routes, one route is assigned to them.
Obviously, not only the vehicles with conflicting movements are rescheduled. Rescheduling vehicle
Scenario Setup and Simulation
The presented AIM and the fully actuated traffic signal control (used for comparison) are simulated in the microsimulation platform aimsun.next. The AIM is implemented by using the Python programming language. The interface between the intersection control and the traffic model within the simulation is realized by using the aimsun.next’s application programming interface (API) ( 26 ), as shown in Figure 2b. All vehicles that are within a distance of 300 m from the center of the intersection zone are controlled externally and their speeds are set by following the protocols explained in the previous section. Pedestrians are simulated by using the extension “Legion for Aimsun” with the default values for walking speeds and reaction times. Pedestrians are only allowed to cross the street when a pedestrian green light is shown. A demonstration video of the simulation can be found at https://vimeo.com/351534462 here ( 27 ).
Set of Demand Scenarios
Four different traffic demand scenarios and five levels of pedestrian activity (including one scenario without pedestrians for comparison) are simulated. They are presented in Table 1. Levels of low, medium, and high traffic demand are based on studies of similar-sized intersections ( 15 , 28 ), and levels of low, medium, and high pedestrian activity are set according to best practice for urban intersection planning in the U.S.A. Additionally, scenarios with very high vehicle and pedestrian activities are analyzed.
Demand Values for the Different Scenarios
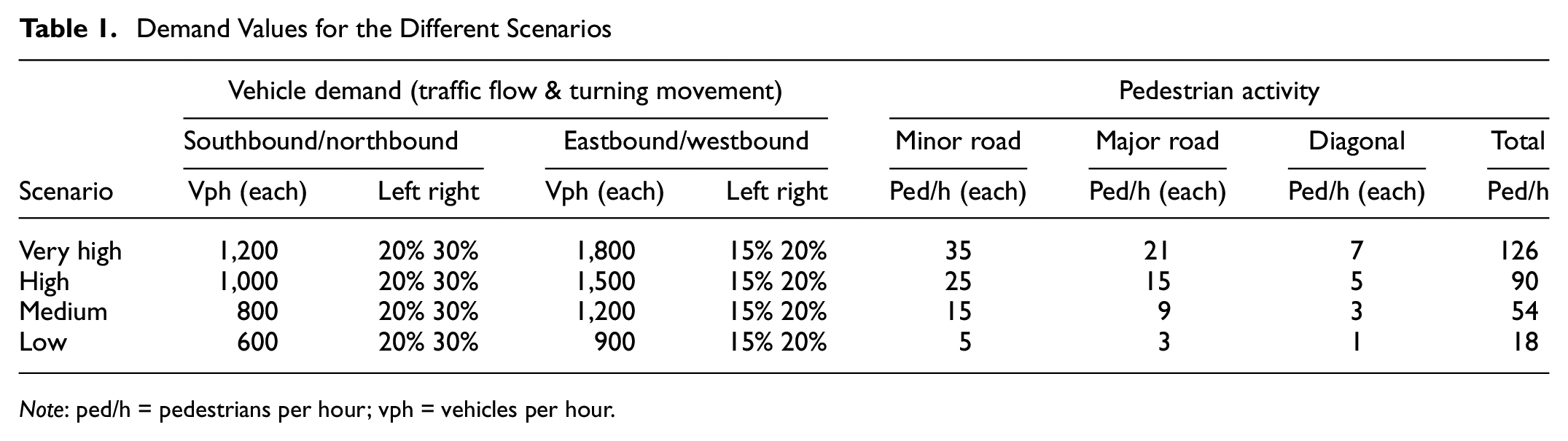
Note: ped/h = pedestrians per hour; vph = vehicles per hour.
Fully Actuated Traffic Signal Control
The fully actuated signal control scenario (AT scenario) was implemented using the actuated traffic signal functionality of aimsun.next. The initial signal control plan was developed by using the VISTRO signal control optimization software ( 29 ) with the demand assumptions of the considered scenarios. The actuated control in aimusun.next follows the NEMA (National Electrical Manufacturers Association) standards ( 30 ). It is important to mention that the AT scenario is implemented in a fully protected environment, where permissive left-turn phasing and right-turns-on-red are not allowed. There are no exclusive pedestrian phases, but pedestrian signals are set concurrent to the vehicle signal phases. Cycle lengths returned by VISTRO for the different vehicular traffic demand scenarios are shown in Table 2.
Parameter Values for the Microsimulation Experiments
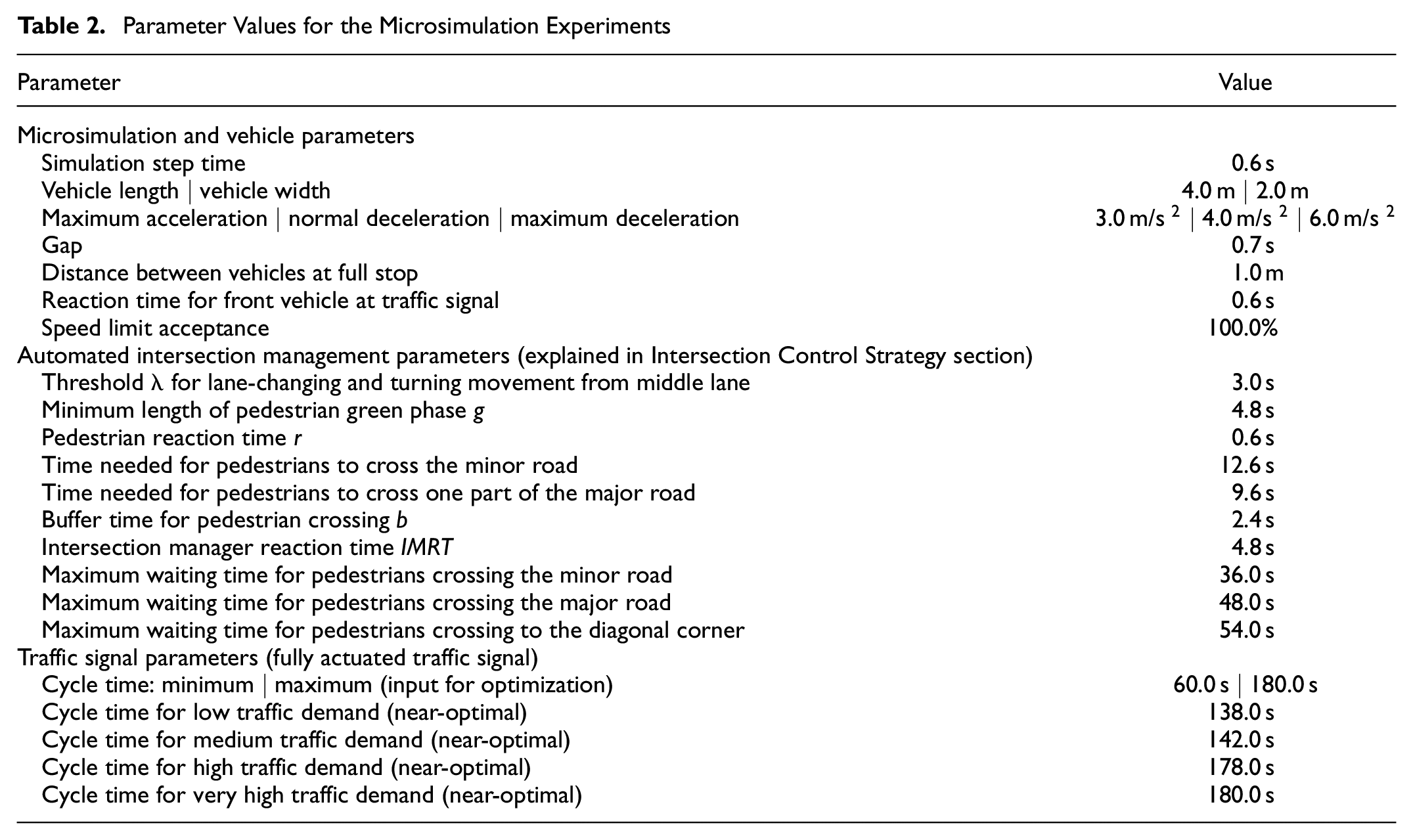
Simulation Parameters
An overview of the parameters used for simulation settings and the control strategy is given in Table 2. To be able to compare the AIM with the AT control, the same simulation and vehicle parameters were used for all scenarios. They are comparable to the values used in Niels et al. (
8
). The variation of parameters is set to 0. The AIM parameters for pedestrian crossing times are set according to the dimensions of the intersection zone and pedestrian walking speeds. Maximum waiting times
Evaluation and Results
Simulations for each of the scenarios were performed for five random seeds for a duration of one full hour including 600 s of warm-up time. To evaluate the results of the investigated scenarios, we compare the average delays of vehicles (overall, i.e., not just stopped delays) and the waiting times of pedestrians.
Evaluation of Vehicle Delays
Once a vehicle leaves the intersection and reaches its desired speed, it does not experience delays any more. Therefore, the delay of vehicle

where
Average vehicle delays for the base scenario with no pedestrian demand are shown in Figure 5a. Values are displayed for each origin–destination relation separately. It can be seen that the AIM control performs significantly better than the AT control for all considered traffic demand scenarios. Left-turning vehicles experience longer delays than through-movement and right-turning vehicles. Delays do not differ notably between vehicles approaching the intersection zone from different directions, which shows that both the AIM and the AT control are well balanced. While delays for the AT scenario increase almost linearly when moving to a higher demand scenario, the AIM control shows very low delays for the first three scenarios, but delays increase significantly when considering very high demand.
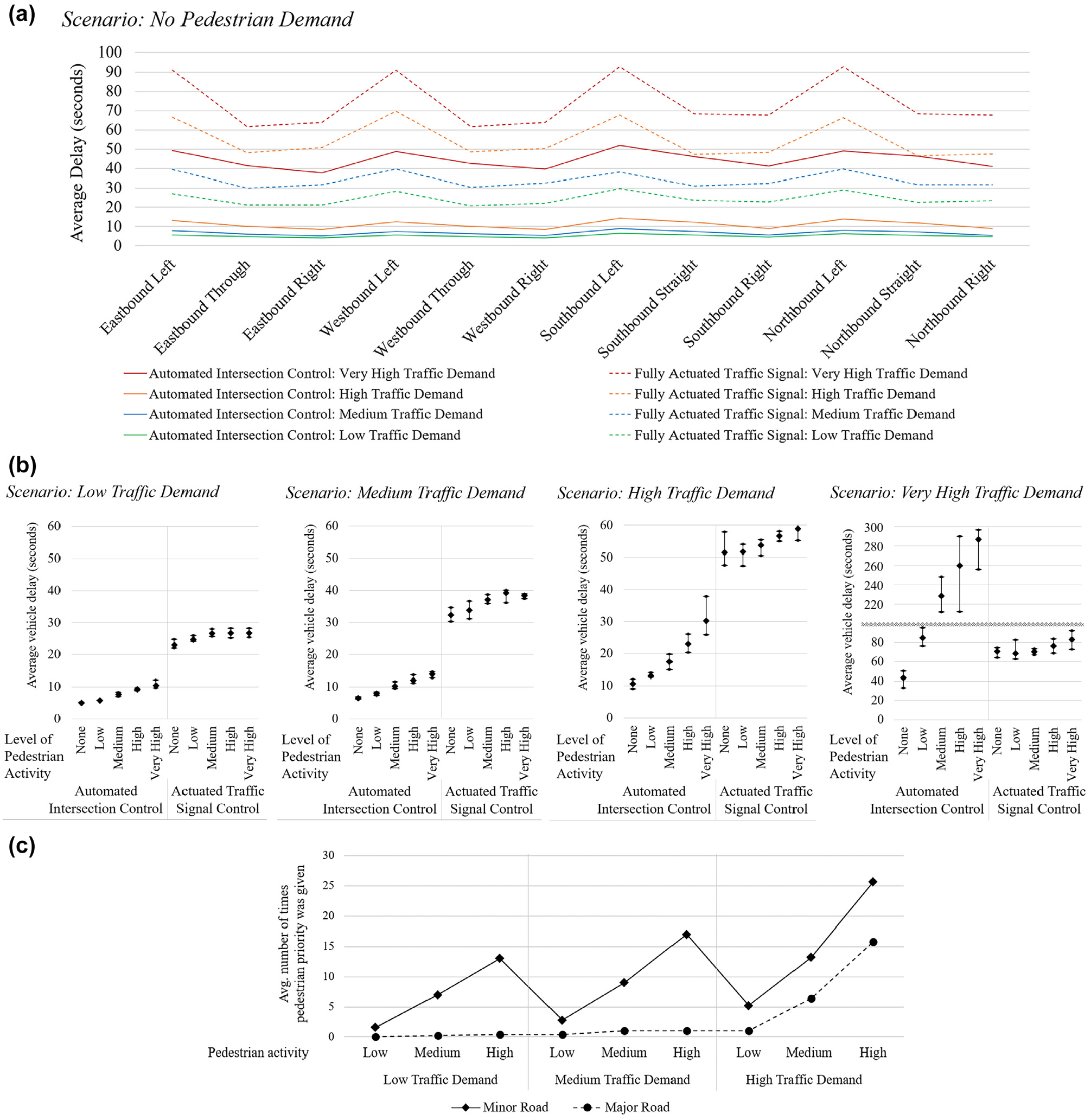
Vehicle delays and number of times pedestrian priority was granted for different scenarios: (a) average vehicle delay for the different control strategies assuming no pedestrian demand, (b) average vehicle delay depending on the combination of traffic demand, control strategy, and pedestrian activity, and (c) average number of times that pedestrian priority was given depending on traffic demand and pedestrian activity.
Figure 5b shows how vehicle delays change with pedestrian activity. Overall average vehicle delays for all simulation runs are presented along with the average delays of the best and worst simulation run. In the AT scenarios, a higher pedestrian activity has a slight impact on vehicle delays, because right-turning vehicles yield to pedestrians and thus block the entrance to the intersection for vehicles driving behind them. For the AIM scenario, it is straightforward to assume that a higher pedestrian activity can lead to longer vehicle delays, because the cells that pedestrians want to cross are exclusively reserved for them for several seconds. The impacts that pedestrian activities have on vehicle delays heavily depend on whether the intersection is operating close to its capacity limits. In the scenarios with low and medium traffic demand, pedestrian activity has almost no impact on vehicle delays. This changes for the scenarios with high traffic demand, however, vehicle delays are still significantly lower than in the AT scenario. Finally, results for the scenarios with very high vehicle demand show that integrating pedestrian operations into the AIM control leads to very long (and virtually unbounded) delays, indicating that the demand cannot be served in these scenarios.
If vehicle demand and pedestrian activity are low, pedestrians can mostly be integrated into the AIM without the need for rescheduling vehicles. If vehicle demand, pedestrian activity, or both, increase, however, pedestrian waiting times would exceed the defined
While the considered very high demand goes beyond demand levels considered in other studies, it must be noted that the AT control shows better results in these scenarios. It has already been suggested by some researchers that FCFS controls are most beneficial in rather low to medium demand scenarios and can be problematic for high demand levels ( 31 ). Additionally, pedestrian movements are strictly separated from vehicle movements in the AIM scenario, leading to further capacity reductions. Therefore, advanced control algorithms shall be tested in the future.
Evaluation of Pedestrian Waiting Times
To assess the pedestrian level of service, the difference between the time a pedestrian

where
Average pedestrian waiting times for each demand scenario are presented in Figure 6. Figure 6a shows that average waiting times are comparable for the AIM and the AT scenarios. The AT scenarios show a higher stochasticity, because the control is not responsive to pedestrian demand. Since the number of pedestrians in the scenario is low, the waiting time of a single pedestrian has a high impact on
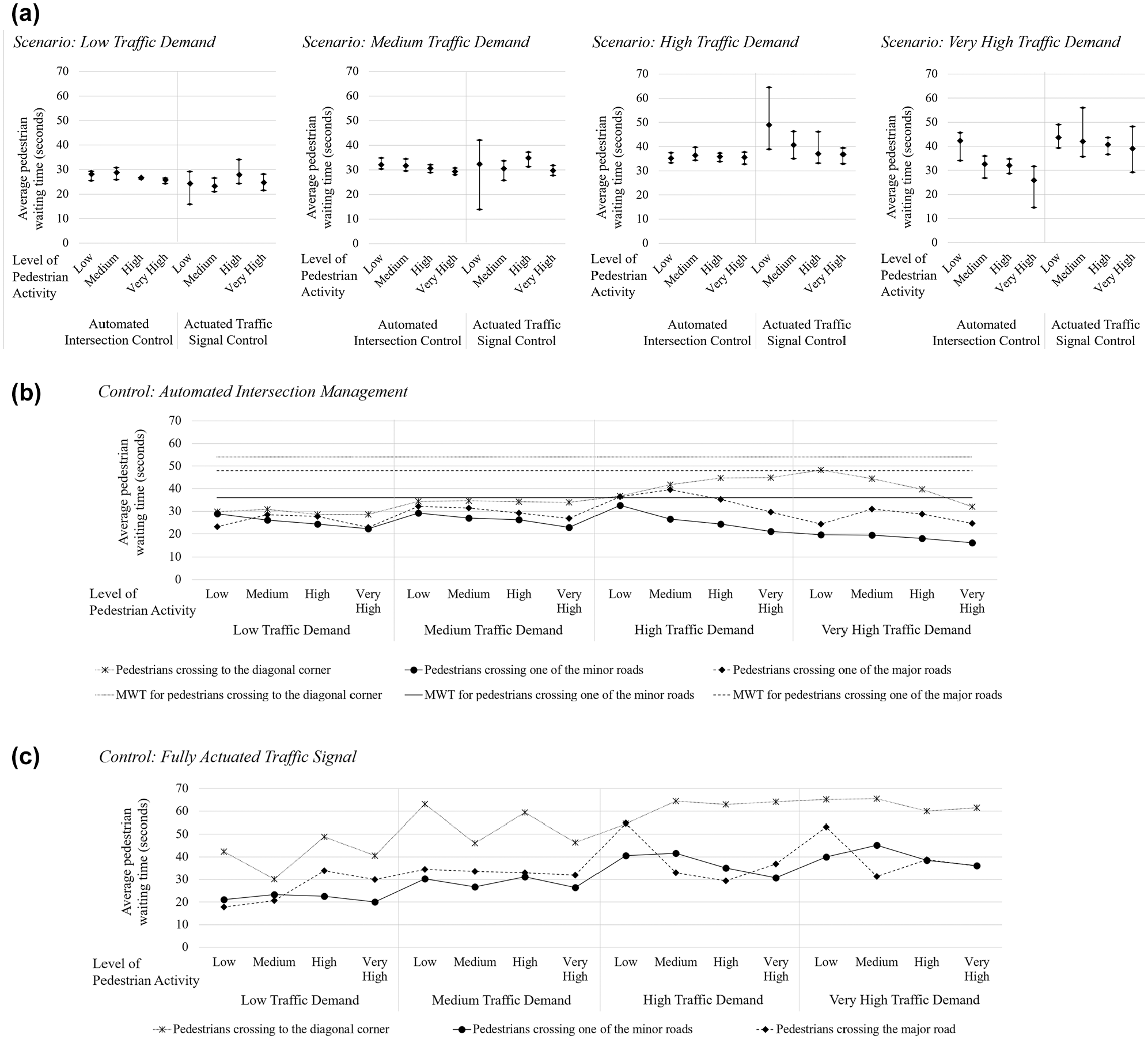
Pedestrian waiting times: (a) average pedestrian waiting times depending on the combination of traffic demand, control strategy, and pedestrian activity, (b) average pedestrian waiting times in the AIM scenario depending on the traffic demand and pedestrian activity, and (c) average pedestrian waiting time in the AT scenario depending on the traffic demand and pedestrian activity.
Figure 6, b and c , present the average pedestrian waiting times depending on the origin–destination relation of pedestrians. As expected, waiting times for pedestrians who cross to the diagonal corner of the intersection are longer than waiting times for pedestrians who cross one of the streets. Even though average waiting times are similar for both control scenarios, it can be seen that maximum waiting times are significantly shorter in the AIM scenario, sometimes even below the average waiting time in the AT scenario.
Conclusion and Outlook
In this paper, a novel strategy for fully integrating pedestrians into AIM is presented. It consists of an FCFS control for vehicles in combination with an on-demand traffic signal for pedestrians. The core of the control is a defined maximum pedestrian waiting time that must not be exceeded. Pedestrian phases in the AIM scenario are fully protected thus providing a high level of pedestrian safety. The proposed intersection control was described, implemented, and tested for a set of scenarios considering several levels of traffic demand and pedestrian activity. Vehicle delays and pedestrian waiting times were evaluated and compared with a fully actuated traffic signal. The presented AIM performed significantly better than the AT for low, medium, and high demand scenarios. However, including pedestrian activities into the AIM control with very high vehicle demand led to very long delays.
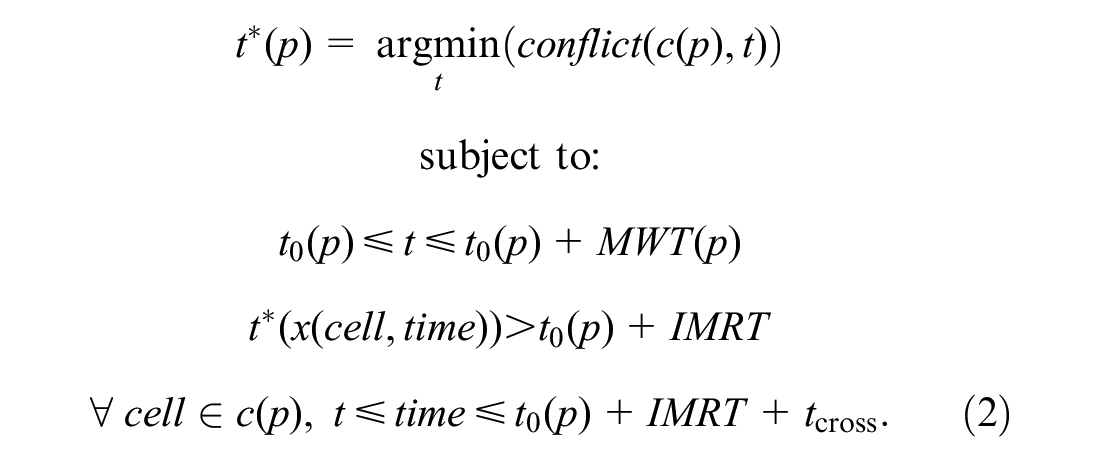
To further improve the performance of the proposed AIM, the reservation strategy will be changed from a modified FCFS control to a more sophisticated strategy in the future. In fact, an optimization problem can be considered that can be formulated as

where
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Tanja Niels, Klaus Bogenberger, Nikola Mitrovic, Aleksandar Stevanovic; data collection: Tanja Niels, Nemanja Dobrota; analysis and interpretation of results: Tanja Niels, Nikola Mitrovic; draft manuscript preparation: Tanja Niels, Klaus Bogenberger, Aleksandar Stevanovic, Robert L. Bertini. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.