
Abstract
Truck platooning is the application of cooperative adaptive cruise control where multiple trucks are electronically linked using vehicle-to-vehicle communication. Although truck platoons might bring fuel savings and emission reductions, their interactions with surrounding traffic and resulting impact on traffic operations and safety are not fully understood. The objective of this paper is to evaluate traffic efficiency and safety in a critical traffic situation when truck platoons are introduced in the system. This paper presents a case study of a merging section, located on A15 motorway, near the port of Rotterdam in the Netherlands. We consider two scenarios: platoons on a mainline carriageway and platoons merging onto a mainline carriageway. We simulate the movements of truck platoons in a microscopic traffic simulator. Longitudinal and lateral controllers for truck platoons, proposed in this paper, can ensure their collision-free, string-stable, and smooth driving behavior. Simulation experiments are conducted by varying platoon characteristics such as market penetration, length, intra-platoon headway, platoon speed, and their ability to create a gap for changing lanes. The results suggest that truck platoons on the mainline carriageway may be detrimental to traffic efficiency and safety in high traffic intensity, whereas truck platoons originating from an on-ramp produce limited impacts. Further, we conduct both local and global sensitivity analyses to analyze the impact of platoon characteristics on traffic efficiency and safety. The findings emphasize that uncertainty in traffic efficiency and safety strongly depends on the interactions among platoon characteristics, traffic demand, and traffic scenarios.
Cooperative adaptive cruise control (CACC) is an emerging technology with automated speed controls by using vehicle-to-vehicle (V2V) and/or infrastructure-to-vehicle (I2V) communication ( 1 ). CACC is shown to be beneficial for road capacity improvement (1, 2), traffic flow stability (3, 4), and traffic safety (5, 6). CACC can be utilized to improve the efficiency and safety of road transport operations. The application of CACC to freight transport is known as truck platooning. In this system, trucks move together in tight platoons using V2V communication ( 7 ). Recent practical trials report significant fuel savings and emission reductions by introducing truck platoons (8, 9), whereas simulation-based studies report mixed effects on traffic efficiency (10–15). We use platoons and truck platoons interchangeably throughout this paper.
The efficient transport of containers to the hinterland is an important part of the global supply chain. Grouping trucks together in a convoy might be an interesting proposal for port authorities and carriers to move containers out of the port area because of fuel savings, efficient use of labor, and safer operations. Yet, little research has been done so far to assess the impacts of truck platoons in critical traffic situations which are particularly interesting for road transport authorities. One of these situations lies around merging sections. The interactions of truck platoons with the surrounding vehicles in the vicinity of merging sections are not fully understood, and neither are the effects on safety and efficiency. Port terminals might generate a platoon demand through on-ramps in the future, and to the best of our knowledge, this paper is the first to consider this probable scenario. Besides, the uncertainties associated with the potential traffic and safety impacts, when considering variable platoon characteristics (number of trucks in a platoon, intra-platoon headway, desired speed of platoon, market penetration of platoon vehicles, and lane-changing policy), call for a detailed sensitivity analysis.
Consequently, the main objective of this paper is to evaluate the effects of varying several platoon characteristics on traffic efficiency and safety at merging sections. The contributions of this paper are twofold. First, we develop a novel lateral controller in combination with an existing longitudinal controller for truck platoons. These controllers ensure collision-free, string-stable, and smooth driving behavior of platoon vehicles. Moreover, vehicles in a platoon can follow their respective leaders by following a desired time-gap policy. Traffic and safety impacts are subjected to the assumptions behind longitudinal and lateral controllers. Second, we perform a comprehensive sensitivity analysis, both at the local and global levels, to identify the impact of platoon’s characteristics on traffic efficiency and safety around merging sections. We consider both low and high traffic intensity to identify platoon characteristics that might lead to positive or negative impacts on traffic efficiency and safety.
This paper is structured as follows. First, we present a literature review on the modeling of truck platoons within the microscopic simulation and their effects on traffic and safety. Afterward, we present longitudinal and lateral controllers for truck platoons which we have implemented in the microscopic simulation software OpenTrafficSim. Next, we present a case study of a merging section and discuss the impact of platoon characteristics on traffic efficiency and safety. Lastly, we conclude this paper and discuss future works.
Literature Review
This section presents a literature review on the modeling of truck platoons and evaluating their impact on traffic efficiency and safety.
Modeling of Truck Platoons
The longitudinal behavior of trucks in a platoon is controlled using CACC. Most of CACC controllers use a constant time-gap (CTG) policy in which the distance between vehicles is proportional to the speed (3, 12, 16–18). Other approaches mimic truck platooning field trials which use a constant distance gap policy (19, 20). Typically, a single leader is used for communicating information to CACC-equipped followers (3, 12, 16, 19, 20). Other CACC variants report communications with multiple leaders (17, 18). Previous research has shown that CACC controllers based on CTG policy can achieve string stability and collision-free performance in most situations. The car-following model such as IDM+ has also been used to develop the CACC controller for truck platoon ( 15 ); however, the IDM+ model results in a variable time-gap policy in contrast to constant time or distance gap policy used in the standard CACC controllers.
Hsu and Liu specify lane-changing strategies for platoons ( 21 ). In one case, the leader of a platoon signals the followers and all the vehicles change lanes simultaneously. In the other case, vehicles become free agents and change lanes individually after the leader. Simultaneous lane changing of the truck platoon is also reported in the European truck platooning challenge ( 8 ). However, previous research and practical trials are focused on platooning operation on mainline carriageways, and there exists a gap regarding the merging strategies of truck platoons.
Impact of Truck Platoons on Traffic Efficiency and Safety
There are limited studies to assess the impacts of truck platoons, and most of them focus on traffic impacts. Müller reports a 5.5% increase in road capacity with CACC-equipped trucks over a hypothetical 5 km-long three-lane carriageway using simulations ( 10 ). However, the test site does not include any discontinuities. Deng performs simulations over a 3.5 km-long two-lane carriageway without any discontinuities, and shows that average traffic flow significantly increases whereas space mean speed decreases with an increase in the market penetration of platoons ( 11 ). Ramezani et al. show that CACC-equipped trucks can reduce congestion propagation and improve traffic speed on a 15 mile-long I-170 corridor with 21 on-ramps and 20 off-ramps ( 12 ).
Wang et al. study the impact of truck platoons on the traffic operations near a merge section using simulation ( 13 ). Their results suggest that truck platooning may increase maximum outflow by 19% in congested conditions but has no substantial impact in free-flow conditions. However, the authors note that this increase may be attributed to the fact that some vehicles are deleted from the simulation if they are unable to merge in time. Mesa-Arango and Fabregas evaluate the impact of truck platoons on travel time and its reliability using VISSIM simulation around a motorway exit ( 14 ). Calvert et al. report negative effects on traffic flow under congested conditions when platoons are introduced on a 56.6 km trans-European corridor in the Netherlands ( 15 ). Yang et al. use microscopic simulations near a merging and a diverging area to analyze the impact of truck platooning on traffic efficiency and safety ( 22 ). Their findings indicate that truck platooning increases traffic flow even in high traffic intensity. However, truck platooning negatively affects merging and diverging of vehicles along with traffic safety. To the best of our knowledge, only one study has attempted to investigate the safety impacts of truck platooning. This indicates a need to comprehensively study the safety impacts of truck platoons. In particular, scenarios involving truck platoons merging onto a mainline carriageway from an on-ramp have not been considered in the literature.
Longitudinal Controller for Truck Platoons
This section presents a longitudinal controller that governs the car-following behavior of trucks in a platoon. We assume that there is no latency in V2V communication at the controller level and platoon vehicles do not communicate with the infrastructure. Moreover, vehicles in a platoon have homogeneous characteristics. We use a CTG policy and three different controllers or modes to simulate longitudinal movement trucks in platoons.
Preliminaries
An ego truck is a CACC-equipped truck. Let

All three controllers are derived from the works of van Arem et al. ( 3 ) and VanderWerf et al. ( 23 ). As the original models were not designed to work in a dynamic traffic situation, we have adapted them for platoons by incorporating the following two characteristics.
The three controllers have the same structure, that is, the control variable (
CACC Controller


By considering the distance headway from its leader, the ego truck can close the gap if it is more than the desired headway, as shown in Equation 2. In this way, the ego truck can move within a platoon configuration by maintaining the desired spacing from its leader. Equation 4 ensures that the ego truck follows its accelerating leader in a string-stable manner.
ACC Controller
The ACC controller lacks information about the acceleration and deceleration capabilities of the leader:



CC Controller
In this case, the ego truck only responds to deviations between its desired and current speed:


The values of the controller parameters should be calibrated by considering acceleration-following, gap-closing, collision-free, and string-stable properties. We use the values of these parameters from the work of van Arem et al. (
3
). Here,
Verification Tests for CACC Controller
We consider a platoon of five vehicles to conduct performance verification tests for our CACC controller. Figure 1 shows performance of CACC controller under three scenarios.
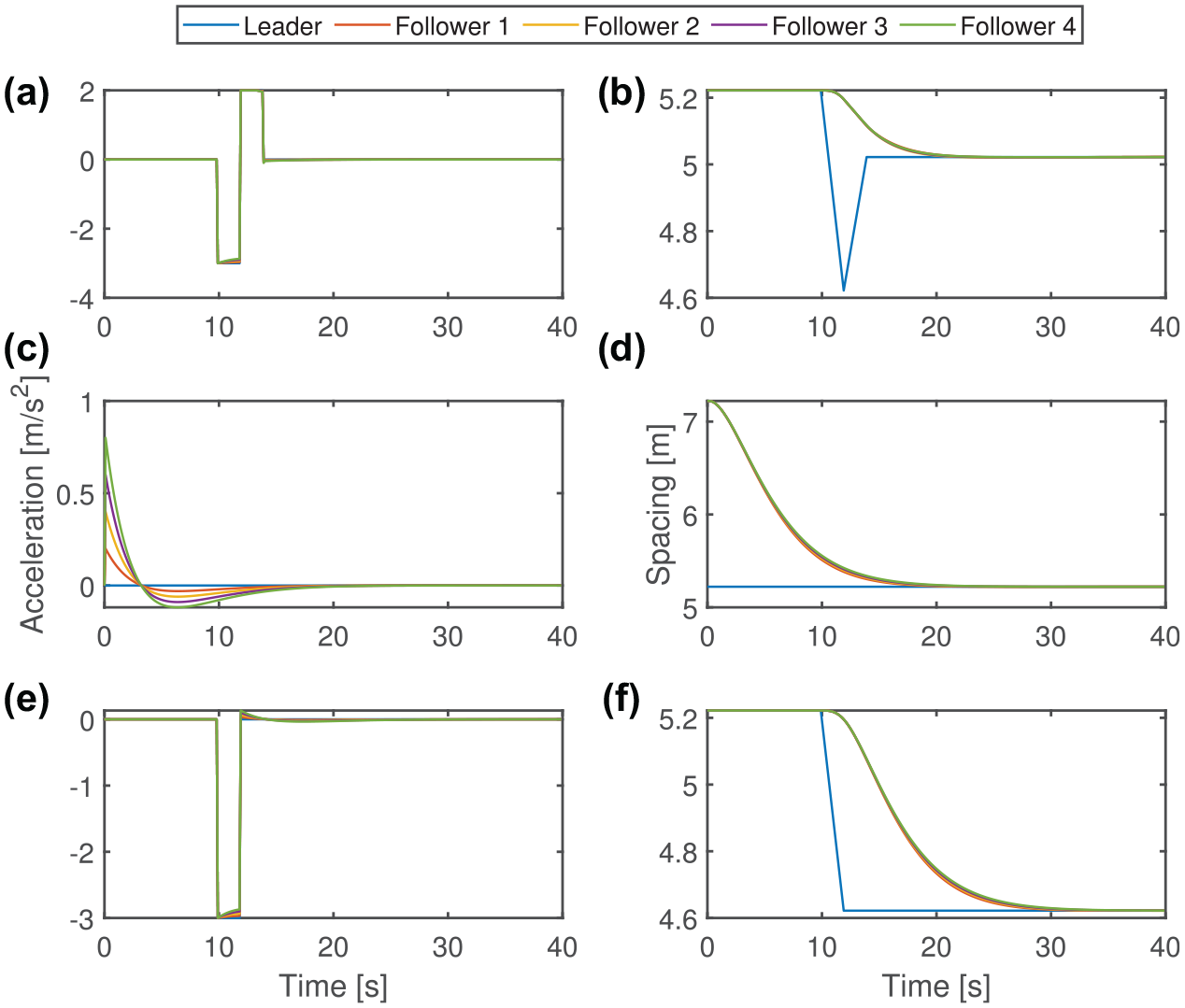
Verification test for CACC controller’s performance: (a) platoon acceleration under stop-and-go scenario, (b) gap spacing under stop-and-go scenario (blue line refers to the desired gap spacing), (c) platoon acceleration to keep gap spacing close to desired spacing, (d) variation in gap spacing as automatic gap closing triggers when current spacing exceeds desired spacing, (e) platoon acceleration under emergency braking scenario, and (f) gap spacing under emergency braking scenario.
First, we consider a stop-and-go scenario where the leader of a platoon first decelerates for 2 s and then accelerates again for 2 s. The CACC controller can respond to the changes in the state of its leader and produces a smooth (i.e., oscillation-free) and collision-free behavior.
Second, we consider a scenario where vehicles in a platoon have a gap spacing more than the desired gap spacing at the initial condition when a leading vehicle instantaneously brakes for 2 s. Our controller can bring vehicles in that platoon at a safe gap spacing, thus resulting in a string-stable behavior.
Third, we consider an emergency braking scenario where the leader of a platoon decelerates for 2 s. Four following vehicles, equipped with the CACC controller, result in a safe (or collision-free) driving behavior as the spacing between the vehicles stabilizes after some time at around the desired safe following distance (
Lateral Controller for Truck Platoons
The lateral controller for truck platoons governs the lane-changing process of the entire platoon. The lane-changing process of truck platoons comprises several logical steps (see Figure 2). The first step is to check if there exists a desire for a truck platoon to change lanes. The second step checks if this value of desire exceeds the fixed threshold of 0.1. A value of 0.1 ensures that only necessary and mandatory lane changes are performed. The lane-changing desire is explained in the following subsection. If a truck platoon has a desire more than the threshold, lane-change sequence step is activated that ensures that all trucks in that platoon can change lanes. Trucks in a platoon follow a last-vehicle-first principle to change lanes. Finally, a gap is accepted or rejected based on the resulting safe deceleration that follows from the car-following model and available space in the target lane. Here, the logic checks if space for a platoon to change lanes is free, which depends on the number of vehicles in that platoon desiring to change lanes. Besides, the deceleration for both the lane-changing platoon vehicle and the new follower in the target lane should be larger than some safe deceleration threshold ( 24 ). The key concepts of the lateral behavioral model of truck platoons are described as follows.
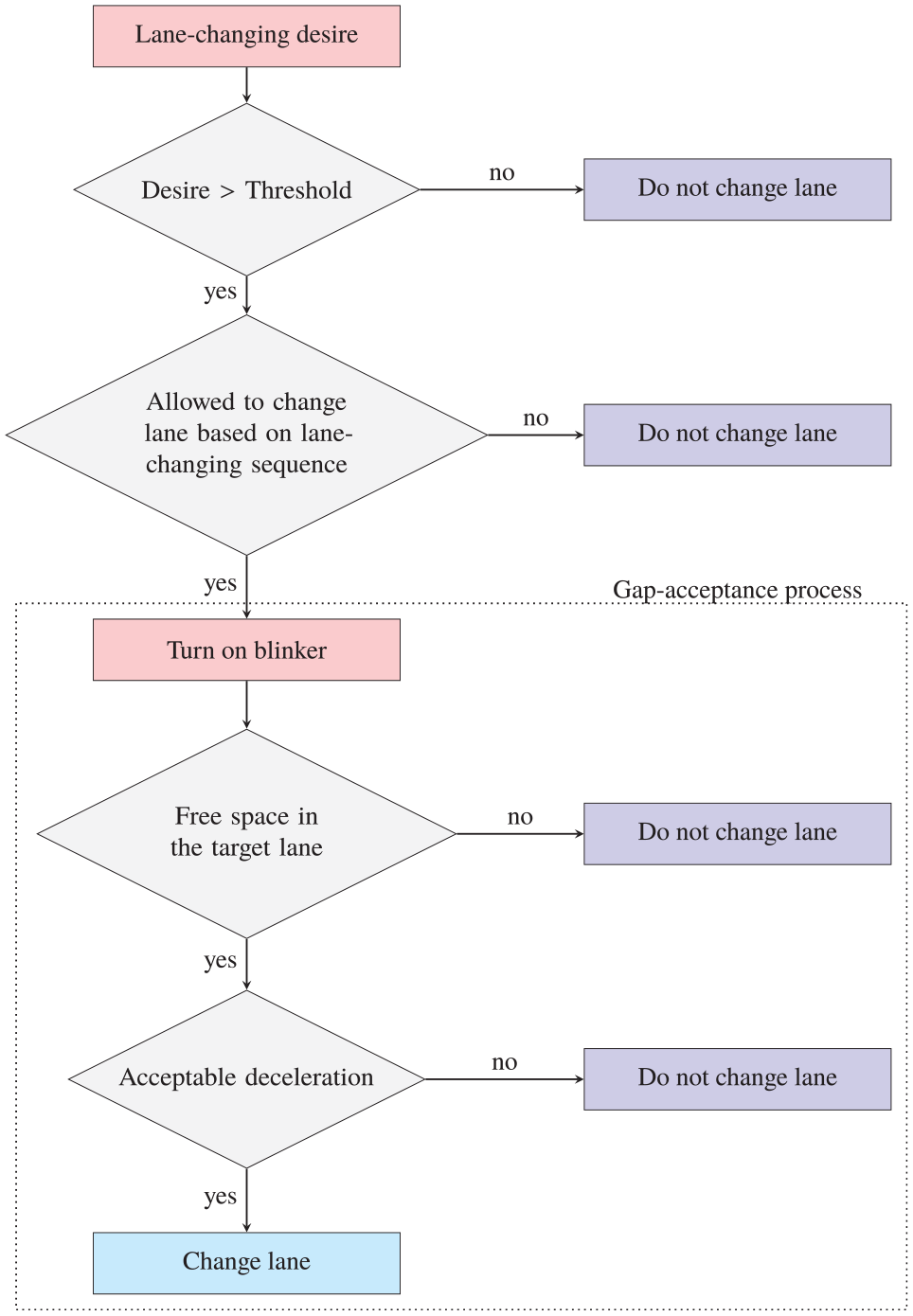
Lateral controller governing lane-changing of truck platoons.
Lane-Changing Desire
In this paper, platoons only perform mandatory lane changes, and it is integrated into the lane-change model with relaxation and synchronization (LMRS) ( 24 ). The LMRS is based on the desire to change lanes which is described as a combination of both mandatory and voluntary (discretionary) incentives. The desire to change lanes for platoons builds only upon the route incentive of the LMRS. Note that a strict keep-right policy is integrated into the LMRS, which ensures that platoons move on the rightmost lane of a mainline carriageway.
The desire to leave any lane

The first term in Equation 10 refers to the desire based on the remaining distance to perform one (or multiple) lane change(s) (
Now that the desire for any lane (
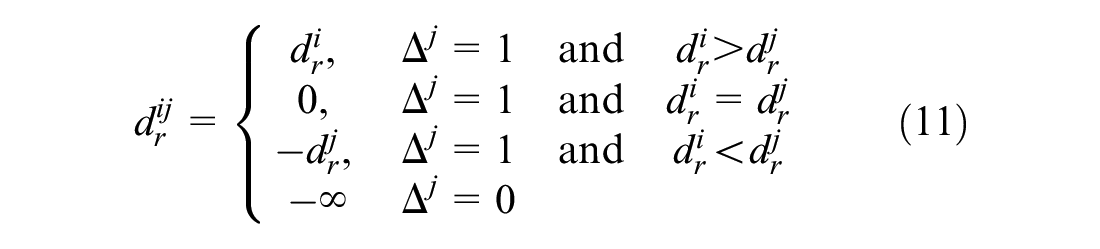
All cases in Equation 11 include a check on whether a route can still be followed on the target lane. We use a binary variable (
Lane-Changing Sequence
We use the last-vehicle-first principle for trucks in a platoon configuration to perform mandatory lane changes or merging maneuvers. This sequence ensures a safe and smooth lane-changing maneuver as conflicts between vehicles in a platoon and the surrounding vehicles are minimized. The ability of a platoon to change lanes depends on the desire of the last vehicle. The first step for the lane-change logic is to assess the desire of the last vehicle in a platoon and compare it with a threshold. In the case in which the desire to change lane exceeds the threshold, the last vehicle turns on the blinker and looks for a gap in the target lane. The gap-acceptance process for the last vehicle in a platoon is similar to LMRS ( 24 ) as it depends on both spatial availability and acceptable deceleration. Once the last vehicle accepts the gap, the rest of the vehicles in that platoon change lanes together once a suitable gap is available for them. When there is enough space (or gap) in the target lane, the rest of the vehicles in a platoon complete their lane-change maneuver. However, this gap-creation process for the rest of the vehicles in a platoon can be made faster by enabling a gap-creation algorithm. An illustration of a platoon’s lane-changing sequence is shown in Figure 3.
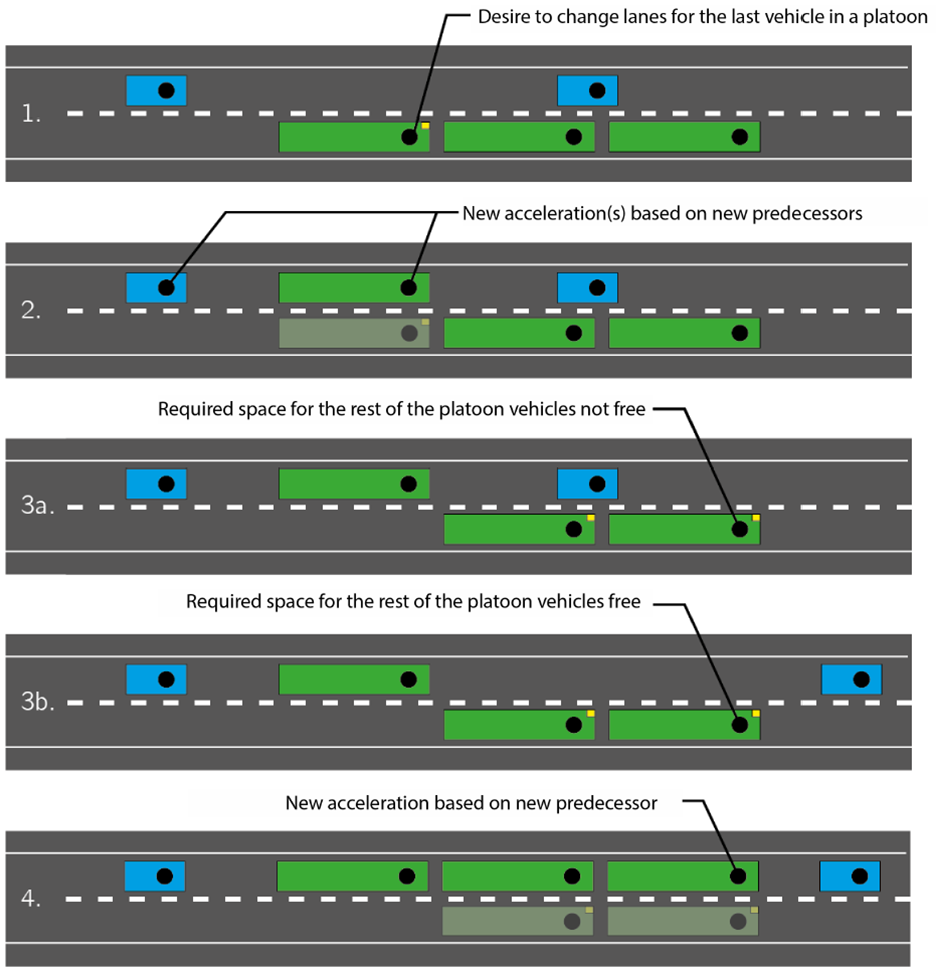
Lane-changing sequence of a truck platoon.
Gap-Creation Ability of Truck Platoons
The gap creation is considered here as the ability for a platoon to create a gap so that vehicles that are part of the platoon can change lanes. This is done by decreasing the platoon’s speed in the case there is a desire to change lanes but one- or multiple vehicles in the platoon are not able to merge. For example, this situation may occur when the last vehicle in the platoon has changed lanes but the remaining vehicles in that platoon are unable to change lanes because of the presence of a vehicle obstructing space in the target lane. Then, the gap-creation algorithm is triggered when a platoon vehicle turns on its blinker (see process 3 in Figure 2). Depending on the gap-creation deceleration, the speed of the entire platoon is reduced by applying a deceleration to the leading vehicle in the platoon. As every vehicle in the platoon follows the speed of their predecessor, every vehicle essentially follows the speed of the leading vehicle of the platoon and the overall speed of the platoon is reduced. As the overall speed of the platoon is reduced, a gap is created more rapidly than when no gap-creation deceleration is applied. This process of gap creation is repeated until the platoon can merge. The gap-creation trigger is outlined in Figure 4. A verification test of the gap-creation ability of truck platoons is provided in Figure 5, where we observe that trucks in a platoon apply a deceleration during their lane-change maneuver.
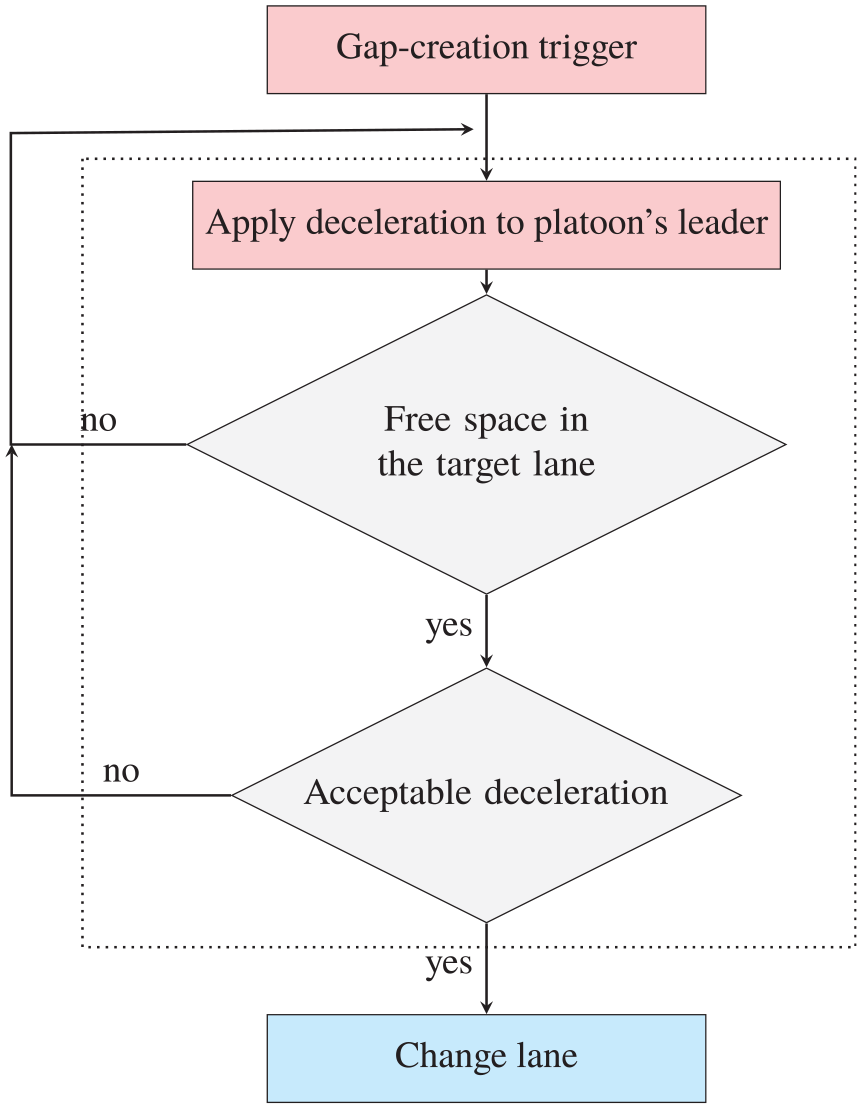
Logical steps in applying the gap-creation deceleration.
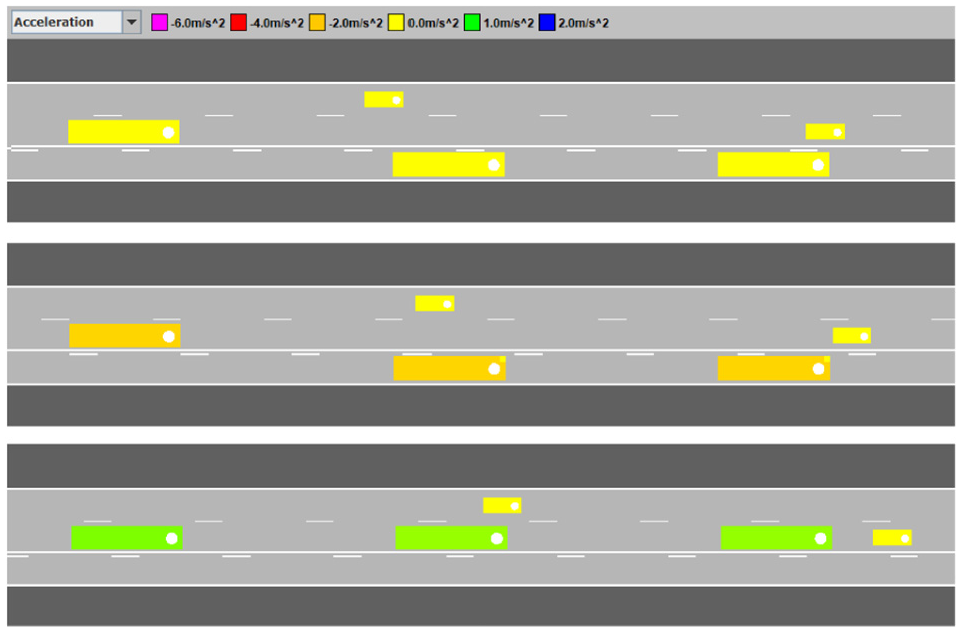
Verification test for the gap-creation deceleration during lane changing of a truck platoon where colors represent deceleration (orange), constant speed (yellow) and acceleration (green).
Experimental Design
In this section, we describe the network used for simulation, demand profile, scenarios considered, and the performance indicators to assess the impacts of truck platoons.
Network Modeling and Demand Data
The network used in the simulation represents an on-ramp to the A15 motorway near interchange Benelux in the Netherlands. The A15 motorway provides access to the port of Rotterdam from the hinterland, and it is one of the significant freight corridors. The simulated network is a two-lane mainline carriageway with an on-ramp. The length of the acceleration lane is 330 m. The total length of the simulated network is 3300 m. The loop detectors are installed just after the merging section. We consider two traffic situations, one with the low traffic intensity (LTI) and the other with high traffic intensity (HTI). The on-ramp to mainline demand ratio is fixed at 25%, and the percentage of trucks in the traffic is taken as 15%. Every simulation run has a total duration of 1 h, with a 15 min warm-up period to allow the network to be filled. Figure 6 shows network and demand profile.
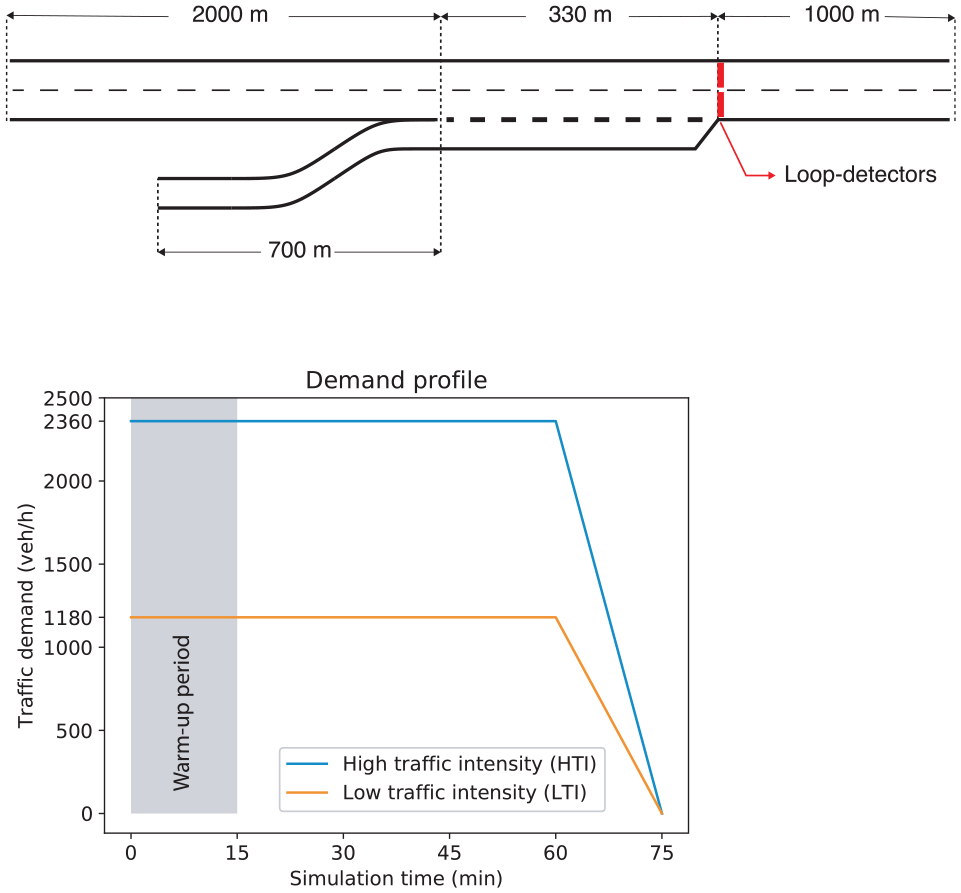
Network (top) and demand profile (bottom).
Truck Platoon Configuration
We assume that truck platoons are formed before entering the network and they have the following variable characteristics.
Market penetration rate (MPR): 25%, 50%, 75%, and 100%
Platoon length: 2 trucks, 3 trucks, 4 trucks, and 5 trucks
Headway in a platoon: 0.3 s, 0.9 s, and 1.5 s
Platoon speed: 80 km/h and 100 km/h
Gap-creation deceleration: 0 m/s2 (off), 1.5 m/s2 (low), and 3.0 m/s2 (high)
Lane changing: only mandatory lane changing is allowed
Cut-ins: only if intra-platoon headway allows for that
A reference platoon configuration is chosen to represent a situation that, without further analysis, would neither result in the “worst” combination of characteristics nor the “best” combination of characteristics in terms of performance and safety. In the reference platoon configuration, we consider 50% of market penetration, 3 trucks, 0.9 s of headway, a maximum speed of 80 km/h for the platoon, and no gap-creation deceleration.
Scenarios
We consider the following three scenarios. Each scenario is simulated for both the LTI and HTI.
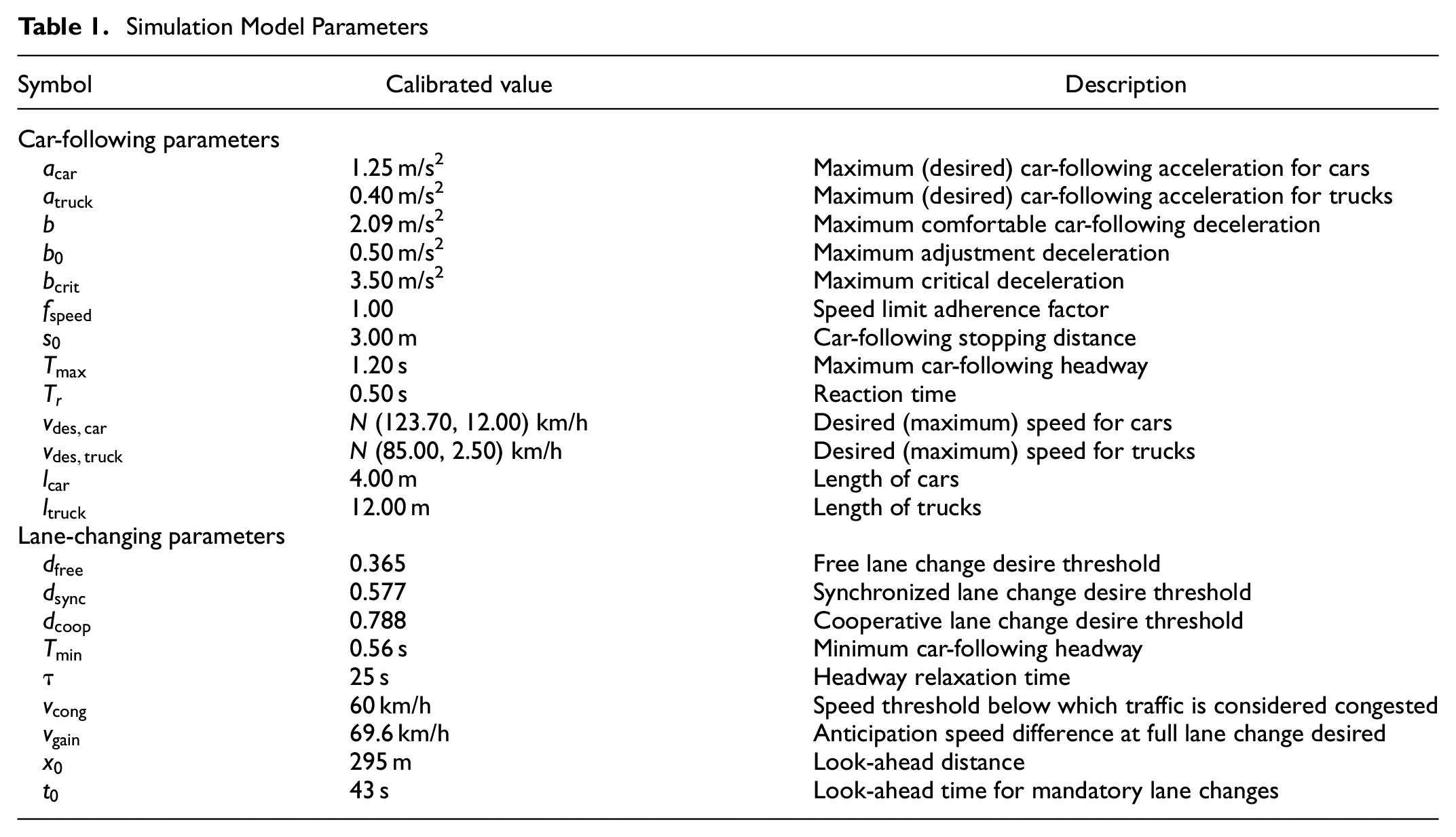
We use OpenTrafficSim ( 25 ) to simulate above scenarios. OpenTrafficSim combines IDM+ car-following model ( 4 ) with the LMRS ( 24 ). For non-CACC equipped cars and trucks, we use default parameter settings. The model parameters are tabulated in Table 1. All the simulations are run 16 times with different random seeds, and the results are then averaged.
Simulation Model Parameters
Performance Indicators
We consider average travel time and maximum flow to evaluate traffic efficiency. Time to collision and required braking rate are used as surrogate measures to evaluate traffic safety.
Average Travel Time
Since the total time spent (TTS) in the network increases with traffic intensity, we use a normalized value of TTS, that is,

Maximum Flow
The maximum flow is only of interest in the HTI because of the presence of congestion and is considered as a proxy for merging capacity. The maximum flow,


Time to Collision
The time-to-collision (TTC) measures the time between two vehicles if there is a possibility of them colliding on a given trajectory. With vehicle

for every simulation time-step

Required Braking Rate
To account for the inability of TTC to differentiate between severity in speed differences, the required braking rate (RBR) is also considered which accounts for all the decelerations

for every simulation time-step

Impact of Reference Platoon Configuration
First, we introduce platoons as a part of the traffic demand with reference platoon characteristics. We assess the impacts on traffic flow and traffic safety in the LTI and HTI scenarios. In the following two subsections, we present the results for two traffic scenarios when platoons are introduced on the mainline carriageway (traffic scenario 1) and from an on-ramp (traffic scenario 2).
Traffic Scenario 1: Platoons on Mainline Carriageway
The first traffic scenario is the one in which truck platoons traverse on the mainline carriageway. In this case, other vehicles merging onto the main road could be hindered by the presence of truck platoons. Compared with the base-case scenario, truck platoons increases the travel time of the system under both LTI and HTI at a significance level of 5% (see Table 2). The maximum flow rate decreases at a significance level of 10%. The number of critical TTC observations increases at a significance level of 5%, whereas the number of RBR observations increases under LTI and HTI at a significance level of 5% and 10%, respectively. The more time vehicles spend in the network, the higher are the chances that they incur safety-critical situations. Overall, it can be inferred that the presence of truck platoons on the mainline carriageway is detrimental to both traffic performance and safety. Figure 7 presents deteriorating effects of platoon on traffic flow.
Traffic and Safety Impacts of Introducing the Reference Platoon Configuration
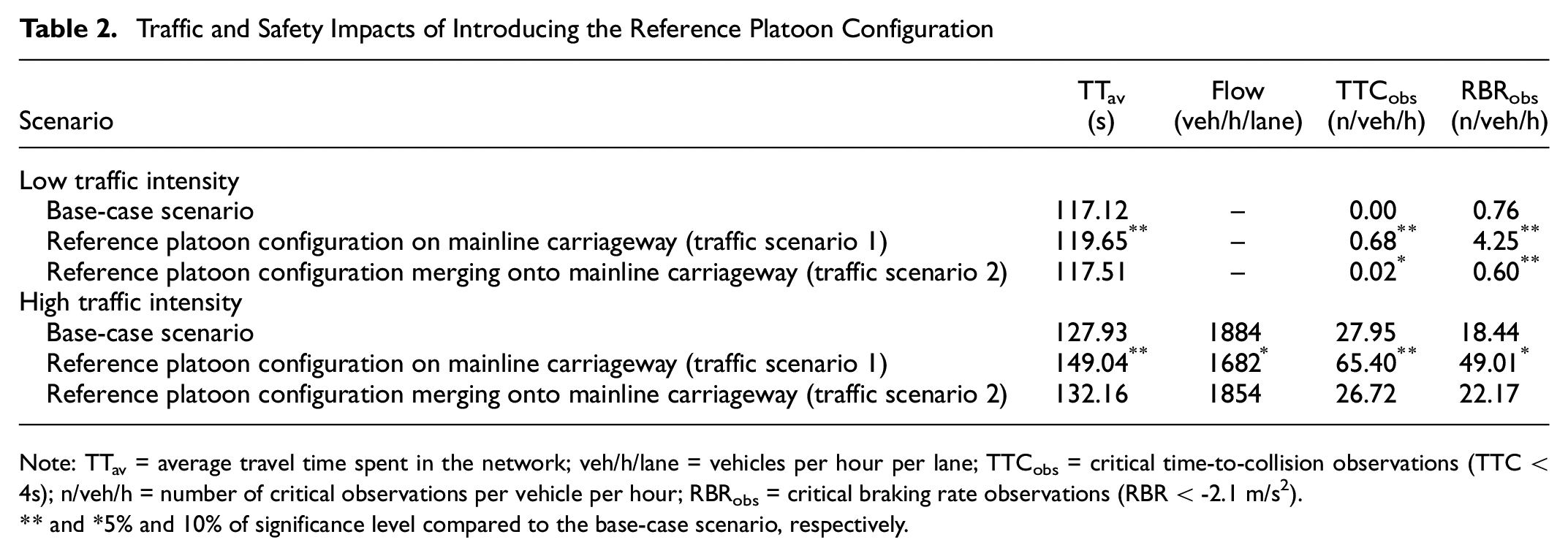
Note: TTav = average travel time spent in the network; veh/h/lane = vehicles per hour per lane; TTCobs = critical time-to-collision observations (TTC < 4s); n/veh/h = number of critical observations per vehicle per hour; RBRobs = critical braking rate observations (RBR < -2.1 m/s2).
** and *5% and 10% of significance level compared to the base-case scenario, respectively.
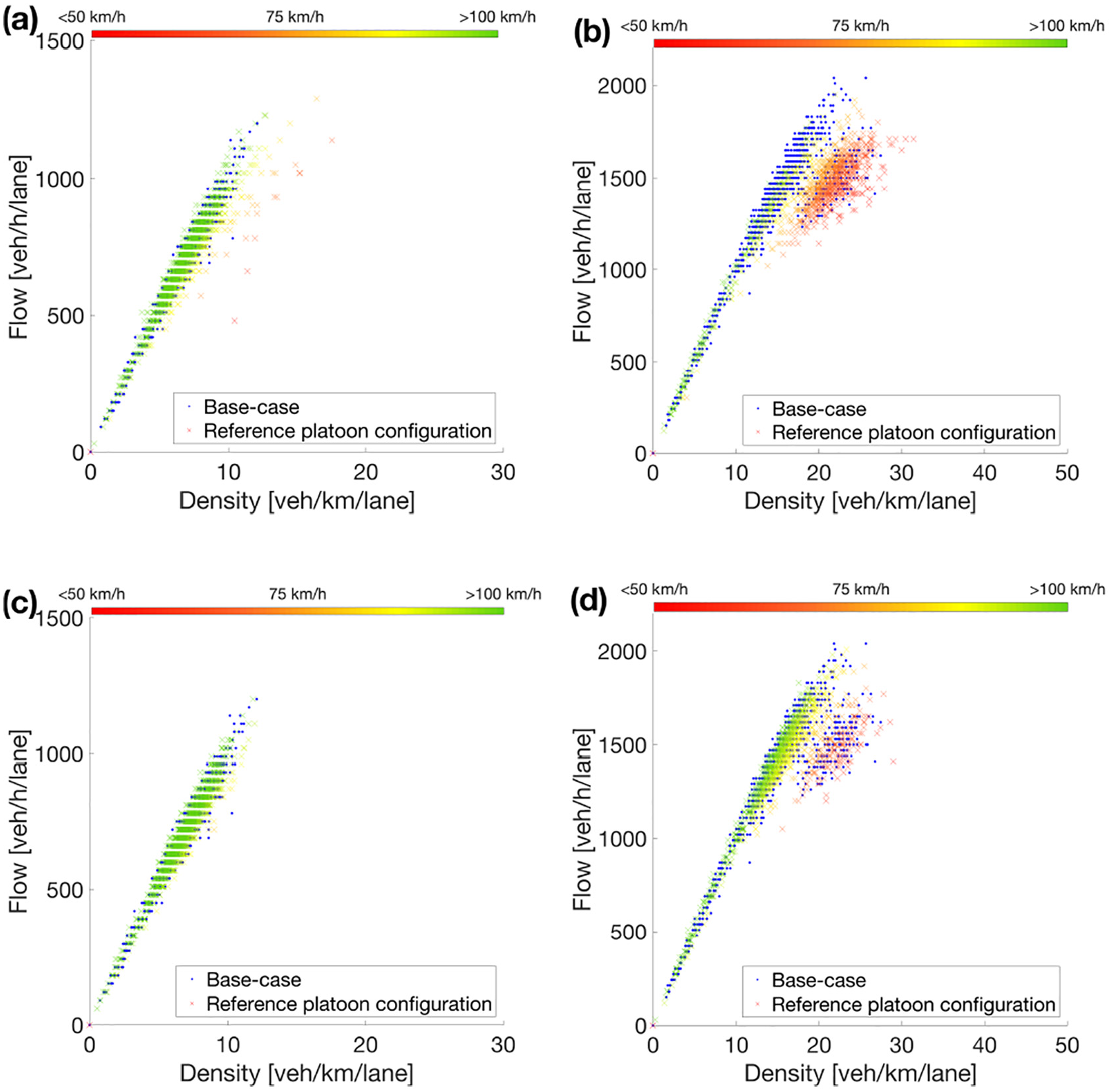
Fundamental diagrams showing macroscopic impacts of the reference platoon configuration: (a) traffic scenario 1 – low traffic intensity, (b) traffic scenario 1 – high traffic intensity, (c) traffic scenario 2 – low traffic intensity, and (d) traffic scenario 2 – high traffic intensity.
Traffic Scenario 2: Platoons Merging from an On-Ramp
The second traffic scenario is the one in which platoons are merging onto mainline carriageway from an on-ramp. In this case, truck platoons may experience the difficulty of merging onto mainline carriageway but also affect the other traffic when doing so. Introducing truck platoons with reference characteristics does not affect the travel time of the system under both LTI and HTI at a significance level of 10% (see Table 2). Maximum traffic flow also is not different than the base-case scenario at a significance level of 10%. In terms of traffic safety, truck platoons merging from an on-ramp do not alter the number of critical RBR observations at a significance level of 10% for both low and high traffic intensity situation. Only in HTI, the presence of truck platoons lowers the critical TTR observations at a significance level of 5%. Overall, it can be inferred that platoons merging from an on-ramp do not affect traffic performance and safety. It should be noted that only 25% of platoons are generated in traffic scenario 2 compared with traffic scenario 1 because of the fixed on-ramp to mainline demand ratio.
Impact of Platoon’s Characteristics
In this section, we analyze the impact of a platoon’s characteristics on traffic efficiency and safety at the local and global levels. First, we discuss one-at-a-time sensitivity analysis (OAT-SA) which measures the impact of varying a single variable on the outcome ( 28 ). For our purpose, we change one characteristic of the platoon at a time by keeping others fixed at reference configuration and observe its effect on the output. For OAT-SA, we use a significance level of 5% to assess the results compared with the base-case scenario. Second, we present a global sensitivity analysis. In addition, we also look at vehicle trajectories at the merging section These trajectory plots illustrate the impact of platoon configuration on traffic efficiency and safety. For each scenario, one simulation run that is close to the average of 16 simulation runs is selected for the purpose of illustration. Only illustrations showing the impact of MPR are provided in this section. The reader may refer to the rest of the illustrations in the appendix.
Traffic Scenario 1: Platoons on Mainline Carriageway
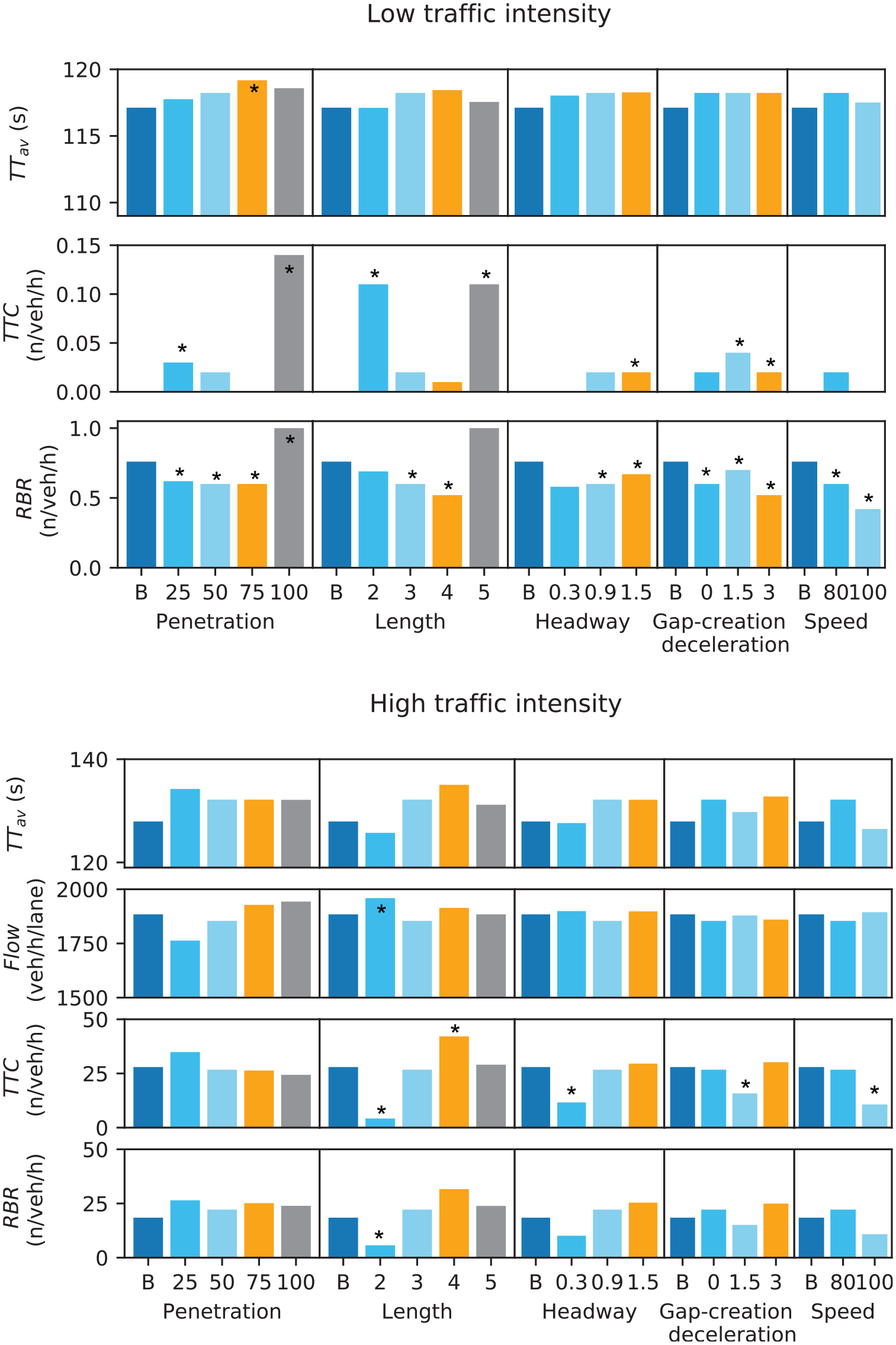
Figure 8 shows the results of OAT-SA for traffic scenario 1. In the subsequent subsections, we explain the results.
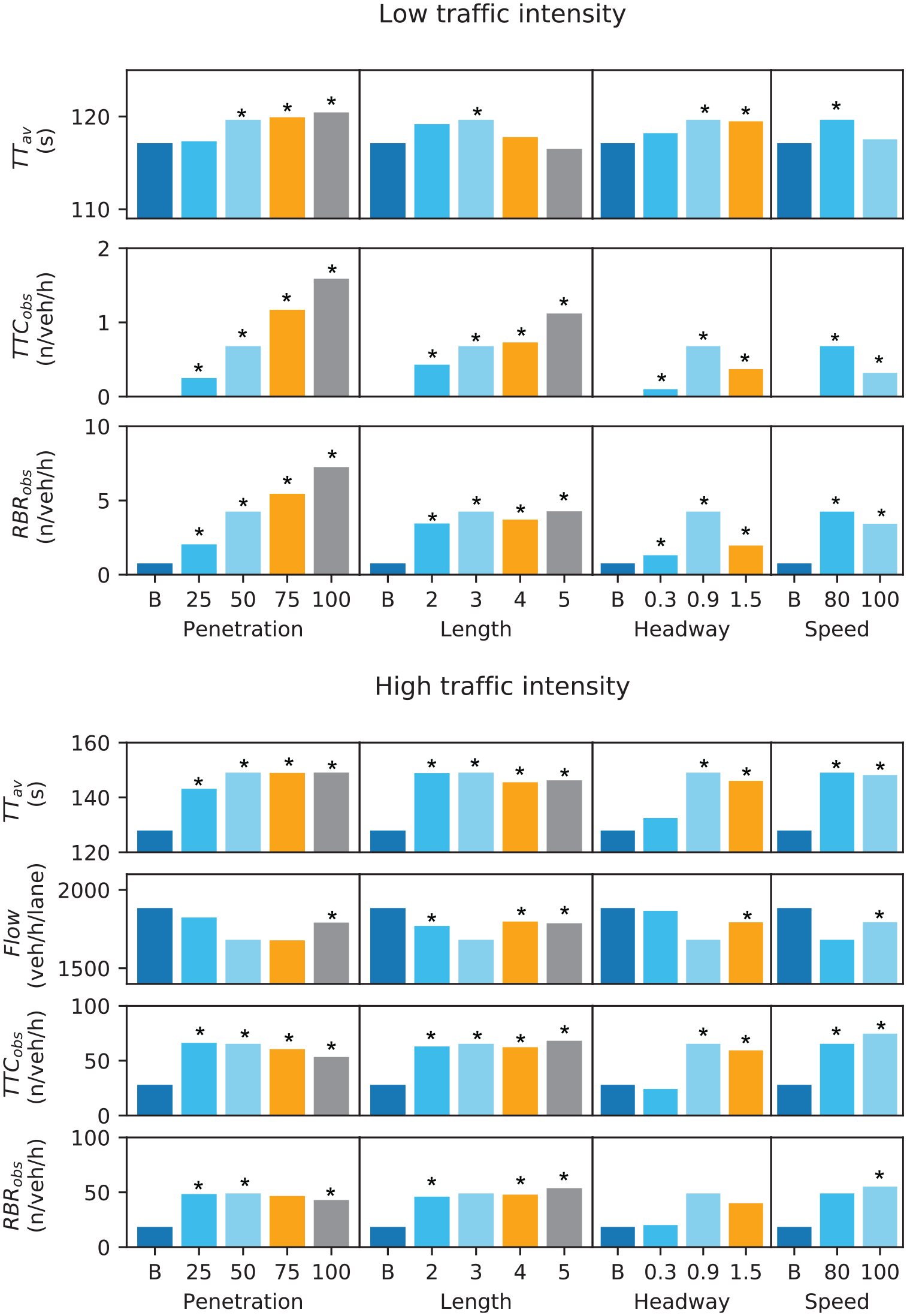
One-at-a-time sensitivity analysis for traffic scenario 1.
Market Penetration Rate
An increase in the MPR of truck platoons replaces non-CACC equipped trucks with CACC-equipped trucks. Conflicts among merging and mainline vehicles increase with an increase in the MPR of truck platoons. Therefore, shockwaves are generated at both the mainline carriageway and the acceleration lane. This effect is illustrated in Figure 9, where we present trajectories of both mainline and ramp vehicles. In HTI, ramp vehicles have the most difficulty merging onto the mainline carriageway at 100% MPR, whereas in LTI, ramp vehicles have limited difficulty as they can find a suitable gap to merge onto the mainline carriageway. As a result, we observe an increase in travel time with increasing MPR. Travel time can increase up to 2.8% and 16.5% in LTI and HTI, respectively. Maximum flow or merging capacity is only significantly affected at 100% MPR: we observe a 5% decrease in capacity compared with the base-case scenario. Similar to the impacts on traffic efficiency, an increase in MPR deteriorates safety as non-CACC vehicles often find themselves in risky and safety-critical situations as captured by TTC and RBR values. For all MPR scenarios, we observe that truck platoons have a negative impact on traffic safety compared with the base-case scenario under both LTI and HTI. Critical TTC and RBR observations in HTI can increase by a factor of 2.37 and 2.65, respectively.
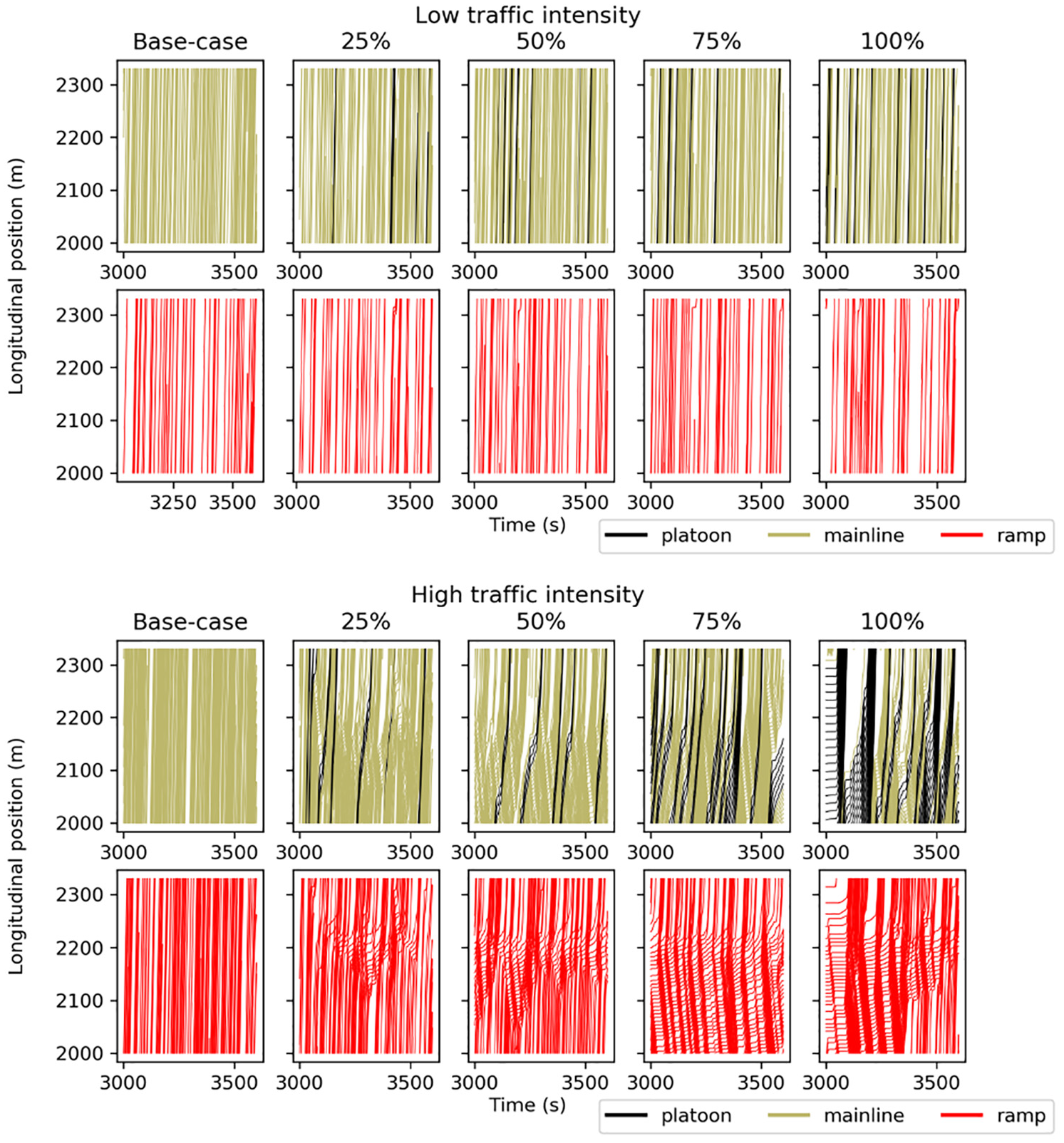
Impact of the market penetration rate of truck platoons on vehicle trajectories for the traffic scenario 1.
Platoon Length
As the platoon length increases, the total number of platoons decreases but the potential for a critical interaction with merging vehicles increases. It should be noted that the linear increase in the platoon length does not result in a linear decrease in the number of platoons. An interplay between the platoon length and the number of platoons governs the availability of potential gaps for merging traffic, which in turn affects traffic efficiency and safety. As a consequence of this interplay, we observe a non-monotonic relationship between the platoon length and performance indicators in both LTI and HTI. In HTI, this interplay results in more or less similar values of traffic efficiency and safety indicators, as trajectories of ramp vehicles are similar (see appendix). We observe a significant degradation of traffic efficiency and safety compared with the base-case. In LTI, changes in platoon length do not significantly affect travel time compared with the base-case but only for reference configuration with 3 trucks in a platoon. However, the presence of longer platoons results in more braking actions and an increased intensity for merging interactions, which is reflected in significantly worse TTC and RBR compared with the base-case.
Headway in a Platoon
By increasing the intra-platoon headway, we increase the effective length of the platoon. Longer platoons on mainline carriageway thus present more obstacles to merging vehicles. Therefore, both efficiency and safety decrease. When we increase the intra-platoon headway to 1.5 s, we allow enough spacing for cut-ins between two trucks in platoon (see appendix for trajectory plots). In this case, the situation results in an improvement to both traffic efficiency and safety compared with the platoon configuration with 0.9 s of intra-platoon headway. At very small inter-platoon headways of 0.3 s, we do not observe significantly different vehicle trajectories compared with the base-case scenario. A platoon configuration with 0.3 s of headway can be allowed in HTI.
Platoon Speed
Increasing the desired speed of platoon vehicles reduces the speed differences between platoons and surrounding traffic. Therefore, an increase in the speed of platoons to 100 km/h improves travel time in LTI compared with a platoon configuration with the desired speed of 80 km/h. At the high speed of a platoon configuration, we also observe low numbers of safety-critical situations. Overall, we observe a limited impact on travel time and safety in LTI. In HTI, vehicle trajectory plots (see appendix) show that conflicts among merging and mainline vehicles are present in both cases: 80 km/h and 100 km/h. As a result, we observe a deterioration of traffic efficiency and safety in both cases compared with the base-case scenario.
Traffic Scenario 2: Platoons Merging From an On-Ramp
Figure 10 shows the results of OAT-SA for traffic scenario 2. We explain the results in the following subsections.
One-at-a-time sensitivity analysis for traffic scenario 2.
Market Penetration Rate
An increase in MPR of truck platoons groups individual trucks in several platoons, thus reducing the number of individual trucks originating from the ramp. On one hand, trucks in a platoon will have to seek one suitable gap to merge onto the mainline. On the other hand, they require a longer gap than the normal trucks; they might have to wait for a while on the acceleration lane. By looking at vehicle trajectories in Figure 11, we observe that truck platoons from ramp do not greatly affect traffic conditions either for the ramp or mainline vehicles. Irrespective of the merging process of truck platoons, vehicles following a truck platoon can merge onto the mainline carriageway if they can find sufficient gaps. As a result, the traffic and safety impacts are not significantly different than the base-case scenario in HTI, whereas in LTI, we observe the slight deterioration of travel time at 75% MPR than the base-case scenario. Similar degradation of safety is observed at 100% MPR than the base-case scenario. Still, the impacts on both traffic efficiency and safety are limited.
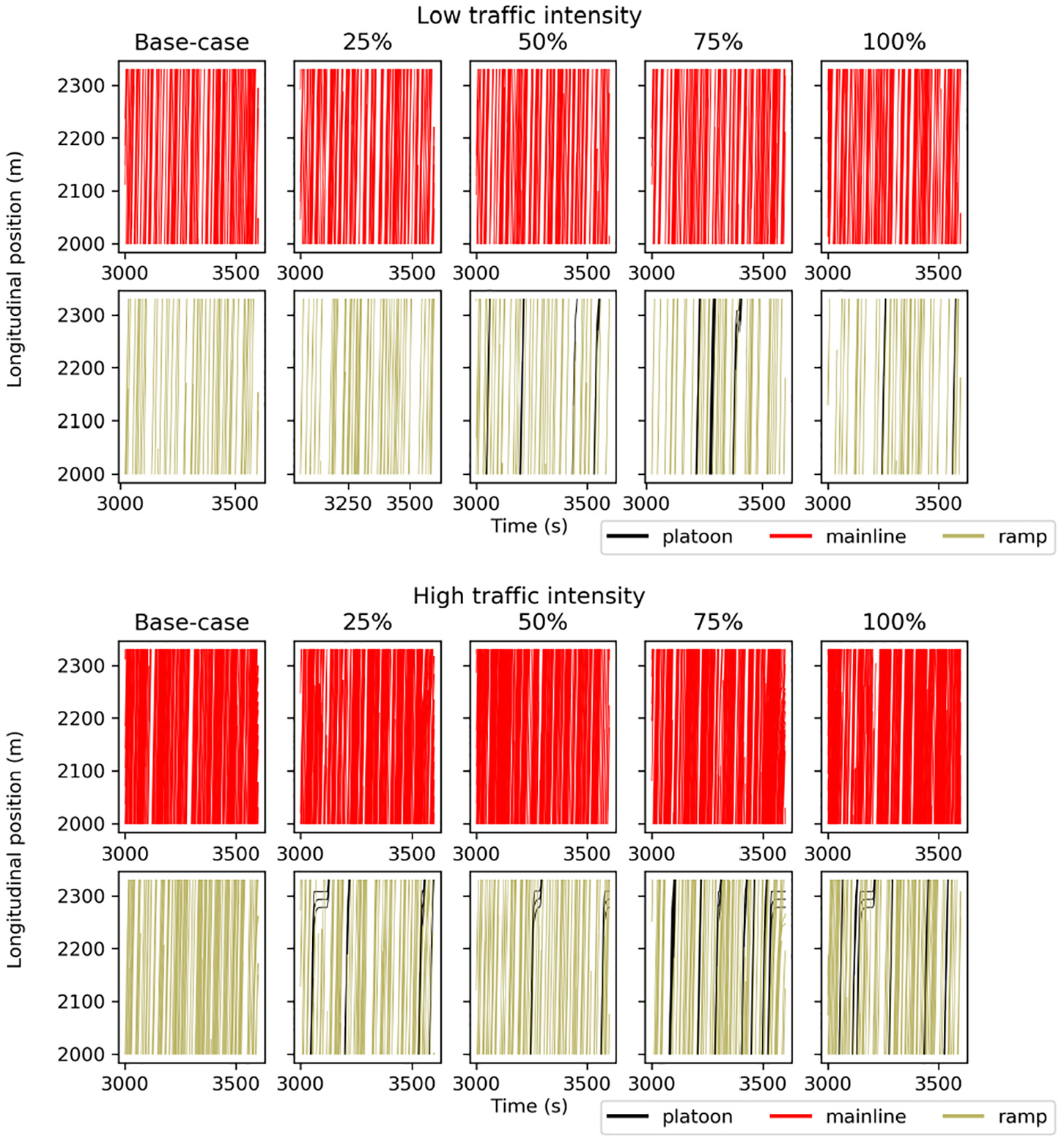
Impact of the market penetration rate of truck platoons on vehicle trajectories for the traffic scenario 2.
Platoon Length
As explained in the previous section, an increase in the number of trucks in a platoon configuration results in a decrease in the total number of platoons in the system. Longer platoons, although small in numbers, present more critical interactions with the surrounding vehicles and require a longer time to merge on the mainline carriageway. Therefore, this interplay between platoon length and the number of platoons governs traffic efficiency and safety. As a result, we observe non-monotonic relationships between performance indicators and the length of a platoon. Travel time in both LTI and HTI is not significantly different than the base-case scenario. A platoon configuration with 2 trucks in HTI is shown to increase maximum flow and decrease safety-critical interactions. As we increase the number of trucks in a platoon, we observe deterioration of traffic efficiency and safety in HTI (see appendix for trajectory plots). Compared with a 4-truck configuration, the traffic and safety situation is improved in a 5-truck configuration because of the reduction of the number of platoons in the system. In contrast to HTI, longer truck platoon configurations (i.e., 5 trucks) slightly deteriorate traffic safety in LTI.
Headway in a Platoon
An increase in the intra-platoon headway increases the effective length of a platoon. Longer platoons will have to seek a larger gap to merge onto the mainline carriageway; therefore, there are higher chances for increased conflicts between a platoon and the surrounding vehicles (see appendix for trajectory plots). Therefore, shorter intra-platoon headways (i.e., 0.3 s) result in fewer TTC observations in HTI. Travel time and maximum flow do not differ significantly by changing intra-platoon headways compared with the base-case scenario. However, in LTI intra-platoon headways have a limited impact on both traffic efficiency and safety.
Gap-Creation Deceleration
The gap-creation policy is varied among no gap-creation, low gap-creation deceleration (1.5 m/s2), and high gap-creation deceleration (3.0 m/s2). With higher gap-creation deceleration, the time needed by platoons to merge will be shorter (see appendix for trajectory plots). Consequently, a shorter lane-change duration minimizes conflicts with the surrounding vehicles and thus improves traffic efficiency and safety compared with the base-case. At least, the situation is no worse than the base-case when tested at a significance of 5%. Especially in HTI, 1.5 m/s2 of gap-creation deceleration significantly reduces safety-critical TTC observation by 43.5%. Similarly in LTI, mid and high gap-creation deceleration result in fewer RBR critical observations. The impact of applying a gap-creation deceleration on travel time and maximum flow is not significantly different than the base-case scenario.
Platoon Speed
With an increased desired speed, the platoon is effectively able to synchronize with the target lane (see appendix for trajectory plots). This synchronization helps not only in the gap-searching process but also in easing conflict with the surrounding vehicles. Therefore, we observe an improvement in traffic efficiency and safety under both LTI and HTI.
Global Sensitivity Analysis
In the previous OAT-SA, we observe non-monotonic relationships as well as the presence of local optima. Furthermore, OAT-SA does not consider the entire input space, as it ignores the simultaneous variation of input parameters. We hypothesize that the interactions among platoon characteristics mostly affect the output or performance indicators. Therefore, we apply a global sensitivity analysis technique, moment-independent measure, as it also accounts for the correlations between input variables. Borgonovo’s importance measure,
Let’s say the model input be

The average effect of input

In the following equation, we define moment-independent sensitivity index

For our analysis, we use Latin hypercube sampling to generate a sample of input parameters. The range of input parameters is as follows.
Market penetration rate (MPR): 0–100%
Platoon length: 2–5 trucks
Headway in a platoon: 0.3–1.5 s
Platoon speed: 80–100 km/h
Gap-creation deceleration: 0–3.0 m/s2 (only used in traffic scenario 2)
For every simulation run, we use a fixed random seed to ensure that the output does not change as a result of seeds. We generate 100 samples which are later used for assessing the parameter’s importance; 400 simulations are run to account for traffic scenarios and traffic intensities. Sensitivity analysis is performed for four scenarios using the SALib package (
30
) in Python 3.7, and the results are shown in Figure 12. Based on the values of
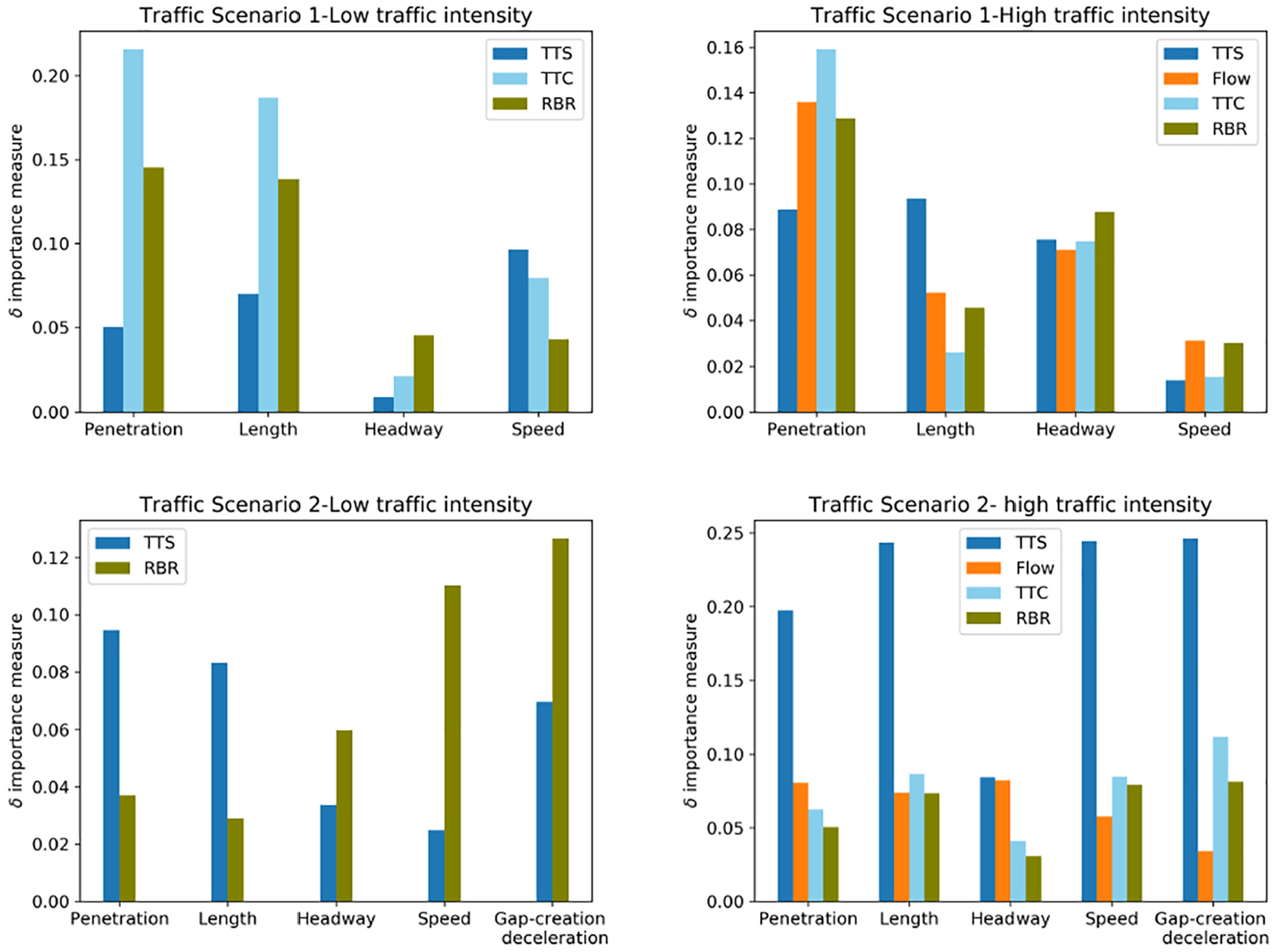
Global sensitivity analysis for evaluating the impact of truck platoon characteristics on traffic efficiency and safety.
Traffic Scenario 1
In LTI, the platoon’s speed is mostly relevant for TTS. For safety, MPR and length are the two most important input parameters, whereas in HTI, MPR, length, and headway affect TTS. Flow is mostly affected by MPR. For safety, MPR and intra-platoon headway are the most important input parameters. In LTI, the contribution of model inputs (
Traffic Scenario 2
In LTI, MPR, length, and gap-creation deceleration are the three most relevant input variables for TTS. For RBR, Gap-creation deceleration and speed are the two most important input parameters. In HTI, MPR, length, speed, and gap-creation deceleration are relevant for TTS. In LTI, we do not perform sensitivity analysis for TTC as it is not affected by platoon characteristics and most of the values are zeros. Further the contribution of model inputs (
Discussion
Our main finding is that truck platooning can be detrimental to traffic efficiency and safety. When truck platoons are part of the mainline traffic, traffic efficiency and safety are deteriorated in HTI around the merging section. By introducing truck platoons on the mainline carriageway, especially in HTI, we limit the opportunities for the merging traffic and in turn increase the complexity of their merging maneuvers, as also reported in previous studies (13, 15). However, truck platoons, being a part of merging traffic, have a limited effect on traffic efficiency and safety.
The sensitivity analysis conducted in this paper has allowed us to design a platoon configuration that can have limited negative impacts on traffic efficiency and safety. Allowing truck platooning at short headways around merging sections seems to be beneficial. An increase in headways may allow merging vehicles to cut-in but it is not better than the short-headway policy. Increasing the desired speed of truck platoons on the mainline carriageway is shown to increase conflicts with the merging traffic. However, when truck platoons are a part of merging traffic and also have a higher desired speed, they are shown to merge smoothly as they can better synchronize themselves with the target lane. The length of platoons is shown to have a non-linear relationship with traffic efficiency and safety indicators as we observe local optima. It shows that the number of platoons in the traffic system is also a significant parameter. Gap-creation deceleration is an important parameter that governs the lane changing of truck platoons. Reducing the merging duration of platoons is shown to have a positive impact on traffic efficiency and safety.
Recall that we have used the OAT-SA to capture the effect of individual platoon characteristics on efficiency and safety. It falls short of capturing the interactions among platoon characteristics. For this, we have used global sensitivity analysis which shows that we cannot separate the effects of individual platoon characteristics and analyze them, as interactions among platoon characteristics predominantly affect traffic efficiency and safety. These interactions also help us to explain non-monotonic relations between the length of a platoon and performance indicators governing traffic efficiency and safety. Therefore, several platoon configurations, resulting from a combination of platoon characteristics, should be evaluated for a comprehensive traffic and safety assessment in critical traffic situations. These situations may also include evaluations around diverge and weaving sections.
We have considered TTC and RBR as surrogate measures to identify safety-critical interactions. The TTC values depend only on relative spacing (
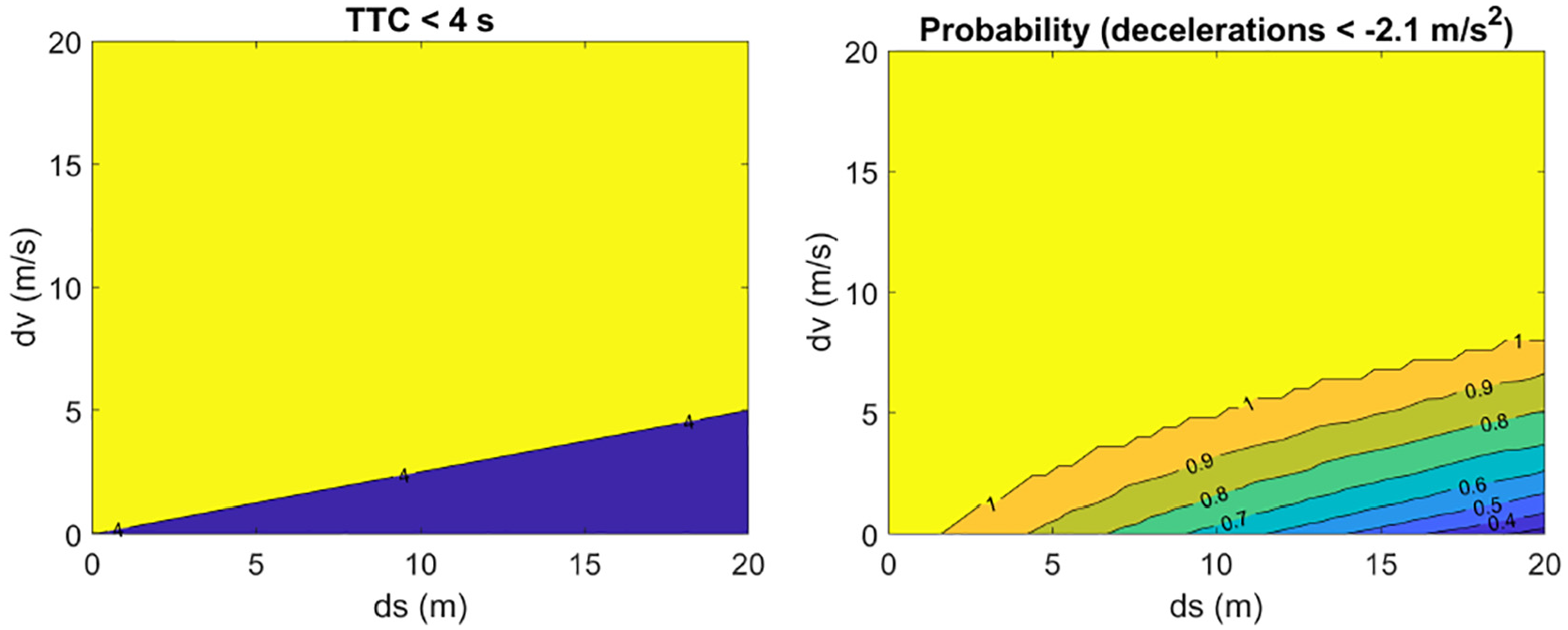
Comparison of traffic safety indicators over relative spacing (
Conclusions and Future Work
This paper presents a comprehensive evaluation of traffic efficiency and safety in a critical traffic situation, that is, a merging section, with the introduction of truck platoons in the traffic system. We propose a novel lateral behavior controller for truck platoons. We implement longitudinal and lateral controllers in microscopic simulation software OpenTrafficSim. The case study around a merging section near the port of Rotterdam shows that the introduction of the reference truck platoons configuration on mainline carriageway deteriorates traffic efficiency and safety in both low and high traffic intensity. However, truck platoons, being a part of the merging traffic from an on-ramp, do not significantly affect traffic efficiency and safety. We use local and global sensitivity analyses to study the impact of platoon characteristics on traffic efficiency and safety. The global sensitivity analysis emphasizes that the interactions among platoon characteristics contribute more to uncertainty in the performance indicators than the individual effects. In general, the results show that the interaction between truck platoons and surrounding traffic depends on the combination of platoon characteristics, traffic demand, and traffic scenarios.
Future research should look into improving the modeling of human-driven vehicles by incorporating human factors ( 32 ). Besides, the control parameters for truck platoons should be calibrated with field tests. In the coming years, autonomous vehicles (AVs) are likely to be part of the traffic mix. A promising research direction will be to analyze the impact of truck platooning in such a traffic mix of human-driven vehicles and AVs. AVs are likely to improve the traffic safety and utilization of available road space. However, merging conflicts between truck platoons and autonomous ramp vehicles might still cause problems for traffic efficiency. Cooperation between vehicles might further improve traffic stability and efficiency in critical situations.
Measures to prevent merging conflicts between truck platoons and merging vehicles can also be explored. One solution is to enable truck platoons with discretionary lane changing so that they can change lanes in anticipation of possible conflicts with the merging traffic. Future research should develop a discretionary lane-change controller for truck platoons which may also include other incentives such as gain in speed. This strategy might be effective in HTI to improve both traffic efficiency and safety. The other solution may come from highway management agencies. They may consider extending the length of the acceleration lane. However, such a solution might not be effective, as merging conflicts can still occur if arrival times of truck platoons and ramp traffic are synchronous.
Our findings suggest that truck platooning on mainline carriageways seems to be detrimental to traffic efficiency and safety in HTI. On the A15 motorway in the Netherlands with successive discontinuities, transporting containers out of the port area in tight platoons seems to be feasible in LTI or night hours. Disengagement of platoons near motorway discontinuous might be a possibility in HTI. Future research can also leverage the potential of communication and technological innovations to alleviate merging conflicts. Besides, a promising research direction can be to develop advanced and integrated traffic control measures. For instance, a lane-reservation scheme for truck platoons can be designed. It would, however, require a detailed analysis to quantify the impacts of reduced capacity and compare those with the gains. Another direction can be to utilize an integrated control measure by combining ramp metering with mainline traffic controls such as variable speed limits.
Footnotes
Appendix
Here, we illustrate the impact of truck platoon characteristics by looking at vehicle trajectories (Figure 14–20). Vehicle trajectories are collected for mainline traffic using the outer lane and for ramp vehicles. For each scenario, one simulation run that is close to the average of 16 simulation runs is selected for presentation in this section. Vehicle trajectories for 600 s (i.e., 3000–3600 s of simulation time) are plotted for the merging area located between 2000 m and 2300 m.
Acknowledgements
The authors would like to thank Dr. Wouter Schakel, TU Delft for his help with OpenTrafficSim and Dr. Jan Anne Annema, TU Delft for his feedback on designing transport policy in the presence of truck platoons. The authors greatly acknowledge the feedback from the associate editor and three anonymous reviewers to improve the paper.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Timo Faber, Salil Sharma, Gerdien Klunder, Maaike Snelder, Hans van Lint; data collection: Timo Faber, Salil Sharma; analysis and interpretation of results: Timo Faber, Salil Sharma, Maaike Snelder, Gerdien Klunder, Lóránt Tavasszy, Hans van Lint; draft manuscript preparation: Timo Faber, Salil Sharma, Maaike Snelder, Lóránt Tavasszy, Hans van Lint. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research presented in this paper is a part of the project “ToGRIP-Grip on Freight Trips” supported by the Netherlands Organization for Scientific Research (NWO), TKI Dinalog, Commit2data, Port of Rotterdam, SmartPort, Portbase, TLN, Deltalinqs, Rijkswaterstaat, and TNO.