
Abstract
Communication delay is detrimental to the performance of cooperative adaptive cruise control (CACC) systems. In this paper, we incorporate communication delay explicitly into control design and propose a delay-compensating CACC. In this new CACC system, the semi-constant time gap (Semi-CTG) policy, which is modified on the basis of the widely-used CTG policy, is employed by a linear feedback control law to regulate the spacing error. The semi-CTG policy uses historical information of the predecessor instead of its current information. By doing so, communication delay is fully compensated, which leads to better stability performance. Three stability properties—local stability, string stability, and traffic flow stability—are analyzed. The local stability and string stability of the proposed CACC system are guaranteed with the desired time gap as small as the communication delay. Both theoretical analysis and simulation results show that the delay-compensating CACC has better string stability and traffic flow stability than the widely-used CACC system. Furthermore, the proposed CACC system also shows the potential for improving traffic throughput and fuel efficiency. Robustness of the proposed system against uncertainties of sensor delay and vehicle dynamics is also verified with simulation.
Cooperative Adaptive Cruise Control (CACC) systems have been attracting wide research attention in recent years. It is one of first connected and automated vehicle (CAV) applications aimed at cooperative vehicle following control with short spacing. A well designed CACC system can greatly improve traffic throughput ( 1 – 3 ), and reduce fuel consumption and emissions ( 4 ). To enable CACC, the system must rely on vehicle-to-vehicle (V2V) communication and a rigorously designed controller, in addition to on-board sensors and actuators.
Communication delay, the lag between sending and receiving the information via communication systems, has been shown to be detrimental to the performance of CACC systems ( 5 – 7 ). CACC systems which are designed without considering communication delay are likely to show poor performance in the real world under extreme communication delay scenarios. In ( 5 ), it is shown that CACC systems may not operate stably when the communication between the subject vehicle and the leading vehicle or the preceding vehicle is delayed. Furthermore, even a very small delay in the communication system can seriously compromise the benefits of CACC systems. ( 8 ) and ( 9 ) show that to keep CACC systems string stable with communication delay of 100 ms, the time gap needs to be as high as 600 ms. As a higher time gap naturally leads to lower throughput, such time gaps will definitely limit the potential of CACC systems to improve improvement.
To this end, compensating communication delay explicitly in control design would be beneficial but remains as a challenging task. In this paper, we present a strategy to compensate for communication delay by adopting the semi-constant time gap (Semi-CTG) policy and correspondingly modifying the involved feed-forward information in the control law. Three stability criteria, namely local stability, string stability, and traffic flow stability, of the proposed CACC system will be analyzed theoretically and verified in simulation. The local stability and string stability conditions of the proposed system are derived. Both theoretical analysis and simulation results show that the delay-compensating CACC has better string stability and traffic flow stability. Furthermore, the proposed CACC system also shows the potential for improving mobility and fuel efficiency.
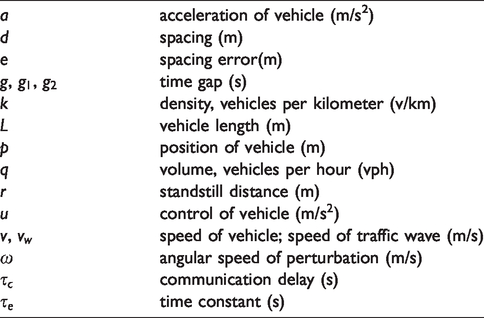
This paper is organized as follows. The next section reviews the related work on CACC control design and delay compensation. The following section designs the control logic and control law of the delay-compensating CACC. The paper then looks at the theoretical analysis of the proposed CACC controller on local stability, string stability, and traffic flow stability. This is followed by some insights revealed by the delay-compensating strategy. Simulation results proving the efficiency of the proposed controller are then examined and followed by a discussion of the merits and disadvantages of the proposed strategy. The concluding section inlcudes remarks on future research. The main variables in this work are listed in Table 1.
Variables and Notation
Literature Review
In this section, previous studies related to the CACC control design and delay compensation are reviewed. When designing a CACC controller, spacing policy and control law are two primary concerns. While a spacing policy specifies how the desired spacing is formulated as a function of the state (for instance, speed) of the subject vehicle and surrounding vehicles, a control law gives the controlled input such as commanded acceleration to reach the desired spacing.
On the subject of spacing policy, well studied policies include constant spacing policy ( 10 , 11 ), constant time gap (CTG) policy ( 8 , 9 ) and variable time gap policy ( 12 ). Constant spacing policy encourages the subject vehicle to follow its predecessor with a predefined constant distance whatever the vehicle speed, while CTG policy defines the desired spacing linearly proportional to the subject vehicle’s speed. Studies show that CTG policy helps to improve the string stability of the CACC system, at the expense of compromising traffic throughput. Variable time gap policies in literature include quadratic speed policy ( 13 ), adaptive policy ( 14 ), and other variants ( 15 ). Variable time gap policy renders the controller nonlinear and consequently it makes the string stability analysis much more complex.
Prevailing control laws in literature include state/output feedback-feedforward control methods and optimization-based control methods. Feedback-feedforward based CACC controllers regulate the error between desired and real spacing by incorporating both feedforward information (the preceding vehicle’s control signal, acceleration, etc.) and feedback information (spacing error, the derivative, integral of spacing error, etc.) ( 8 , 9 , 16 ). Optimization-based methods determine CACC system’s acceleration by solving an optimal control problem ( 15 , 17 , 18 ). While feedback-feedforward based CACC features a low computation burden and easy implementation. Optimal-control based CACC, on the other hand, can achieve optimal behavior and anticipative behavior under state and input constraints. However, the computational load of optimization-based CACC systems makes the real-time application a daunting task. Apart from feedback control-based and optimization-based systems, learning-based CACC systems ( 19 ) have also emerged in recent years.
However, most of the aforementioned control laws do not consider communication delay which leaves systems that have been developed to show poor performance in a real-world environment ( 5 , 8 ). A few studies dealing with communication delay in CACC design were found in the literature, but these methods have shortcomings. A prevailing delay-compensating method involves predicting the future status (position, speed, acceleration, etc.) of the preceding vehicle or the subject vehicle ( 20 – 22 ). It thus needs an accurate estimation of the vehicle dynamics and a precise prediction of the future driving maneuver. Consequently, when faced with uncertainties, the existing predictive methods for compensating delay may fail to work. Other works resort to methods incorporating multi-predecessor states, in which more complicated communication topology is assumed and the heterogeneity in inter-vehicle communication is neglected ( 16 ). To this end, delay-compensating methods that are robust to uncertainties and heterogeneity in the communication system are preferred.
In the remainder, we propose a strategy to compensate for delay in the controller by taking advantage of an adapted CTG policy and feedback control. This strategy takes the historical driving information of the preceding vehicle, rather than the future one, into the control law, and thus needs no prediction. Furthermore, simulation experiments also show the robustness of the proposed method against uncertainties of sensor delay and vehicle dynamics.
Control Design
A platoon with
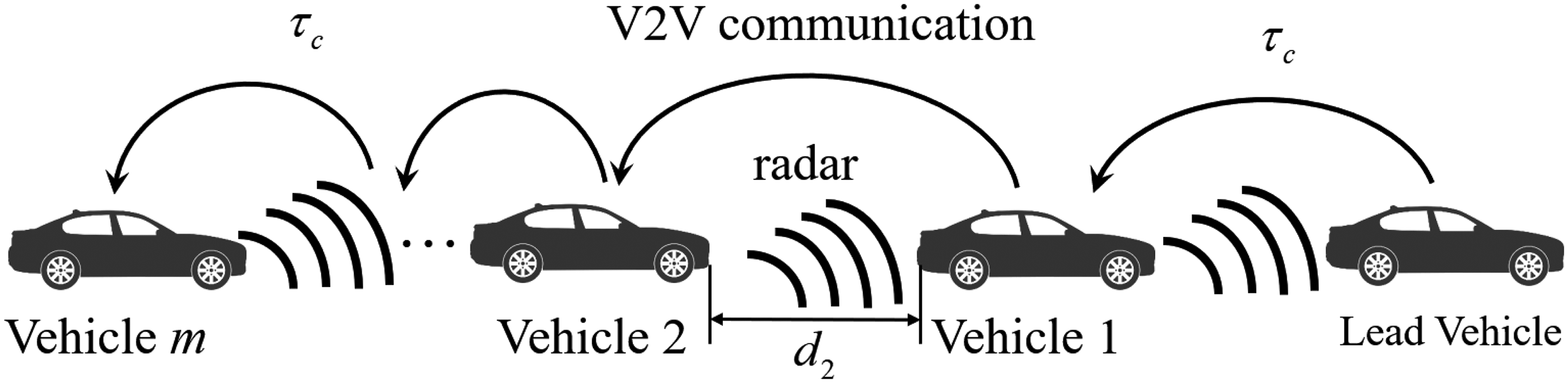
Cooperative adaptive cruise control fleet with communication delay.
The longitudinal vehicle dynamics model, which is assumed to be the same for all the vehicles, is first formulated as follows.

In the remainder of this section, the original CACC ( 8 , 9 ) and delay-compensating CACC (DC-CACC) are introduced. Both CACC systems are linear feedback controllers. The difference between the two CACC systems lies in the formulation of desired spacing.
Spacing Policy of the Original CACC
In the widely-used CACC with a constant time gap (CTG) policy, the prevailing definition of time gap denotes the time it takes the subject vehicle to approach its predecessor at the current speed. The desired spacing for this CACC family is formulated as

Under this formulation, the spacing error is

Spacing Policy of the Delay-Compensating CACC
We propose adapted desired spacing, namely semi-constant time gap policy (Semi-CTG) (
23
), as

The tilde symbol is used to distinguish the variables of the delay-compensating CACC and those of the original. In this spacing policy (
4
), the second part is proportional to the subject vehicle speed and the third part is the running distance of the preceding vehicle in the past
For communication delay which is small enough (as is the case with next generation communication systems), the desired spacing can be also approximated as follows to simplify the control design.

The spacing error is written as
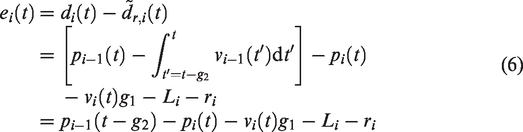
Comparing the spacing errors of the original CACC of Equation 3 and the delay-compensating CACC of Equation 6, it becomes clear that the original CACC requires the current position of preceding vehicle while the delay-compensating CACC only needs the historical information of the predecessor. As long as
Control Law
The control laws of both the original CACC and the delay-compensating CACC are formulated in the same form in this section. The original CACC is a prevalent system proposed in ( 8 , 9 ) that has been widely used in CACC design literature.
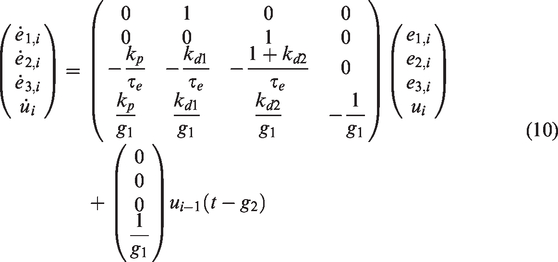
Then error dynamics is formulated as

We formulate the control law as follows, in which the utilized information of the preceding vehicle is all historical information.


Stability Analysis
Delay is critical to several stability properties. Three stability concepts—local stability, string stability, and traffic flow stability—have been widely adopted to evaluate the performance of the CACC system.
Local stability requires that any perturbation on speed, acceleration, or both, will gradually settle down over time (
8
). String stability refers to non-amplifying propagation of perturbation on state (speed, acceleration, etc.), error (spacing error, time gap error, etc.), or control signal through a string of vehicles (
9
,
13
). This stability criterion guarantees that any oscillation will be attenuated when propagating upstream. Traffic flow stability focuses on the evolution of density, velocity, or both, in response to the addition or removal of vehicles to/from the flow (
24
). If any density/velocity perturbation eventually attenuates after a time period, then the system is traffic flow stable.
All the three stability concepts are analyzed in this section. It can be proved that the proposed delay-compensating CACC is local stable and string stable. All the three stability criteria of the delay-compensating CACC are stronger than the original CACC.
Local Stability
In this section, the local stability conditions are first given in Lemma 1. Moreover, the delay-compensating CACC is proved to have stronger local stability than the original CACC in Lemma 2. The delay-compensating CACC is local stable as long as
The sufficient condition for local stability indicated by the Routh–Hurwitz stability criterion is then given as
Note that the local stability condition of the delay-compensating CACC is the same as that of the original one given in (
8
).
Smaller

For the delay-compensating system and the original system with the same time gap, the delay-compensating system has a smaller
String Stability
String stability conditions of the proposed delay-compensating CACC are derived in this section. By comparing the minimum time gap required by the CACC system, it is then shown that the proposed delay-compensating CACC can achieve stronger string stability when adopting the same time gap
The delay-compensating CACC is string stable if it is local stable; higher
where 

On the other hand, in previous works (
23
,
27
), the authors revealed that by combining the vehicle dynamics, the spacing error, and the control law, the transfer function of the proposed CACC system can be derived as

Then it naturally holds that


This concludes the proof of lemma 4.
An example of the minimum time gap as a function of communication delay is given in Figure 2 by adopting parameters
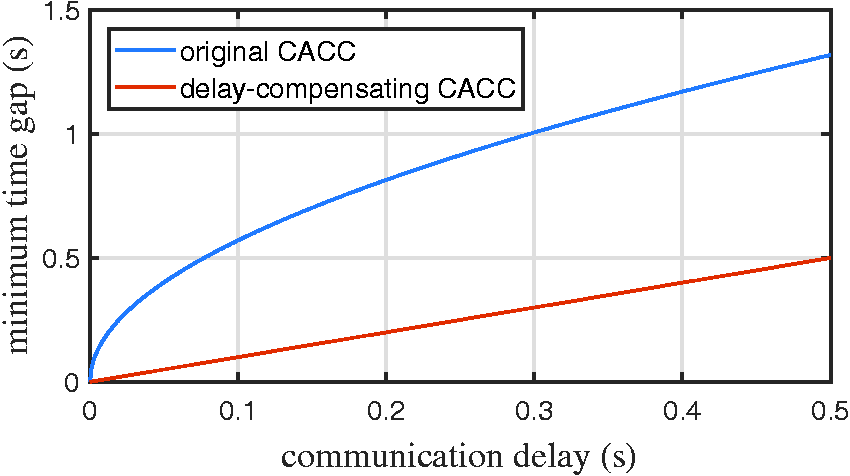
Minimum time gap guaranteeing string stability.
The discussion above indicates that when adopting the same time gap
Traffic Flow Stability
This section discusses the traffic flow stability of the proposed delay-compensating CACC. The fundamental diagram corresponding to the proposed CACC systems is first derived by assuming that all vehicles in the fleet adopt the same spacing policy. By comparing the fundamental diagram of the delay-compensating CACC and the original CACC, it can be asserted that the delay-compensating strategy helps to improve both traffic flow stability and mobility.
The basic values in the triangular fundamental diagram are listed as follows.
Critical density (capacity density): Capacity speed: Capacity: Jam density:
where
The proposed delay-compensating CACC provides higher traffic volume and stronger traffic flow stability than the original CACC. Also, with the same density, the delay-compensating CACC gives higher running speeds in the jam traffic.
The delay-compensating strategy helps to shorten the car-following time gap, which then leads to a higher capacity and higher critical density. An example of fundamental diagram is given in Figure 3. With the same traffic density, the delay-compensating CACC and the original CACC may have a totally different response to the addition or removal of vehicle to/from the flow. For example, when the traffic density is between the critical densities of the two systems, after a vehicle joins or leaves the flow, the original CACC will produce a disturbance of velocity/density propagating upstream, while the delay-compensating CACC will not. Considering the assertion given in ( 24 ) that the propagation of such disturbances is not undesirable whether they decay or amplify, it can be asserted that the delay-compensating provides stronger traffic flow stability. The delay-compensating CACC also helps to improve mobility. This can be partially shown by the capacity, which increases and the time gap decreases. Furthermore, for any density, a lower time gap will always lead to a higher or equal stable speed (as shown in Figure 3), which then further leads to higher traffic volume.
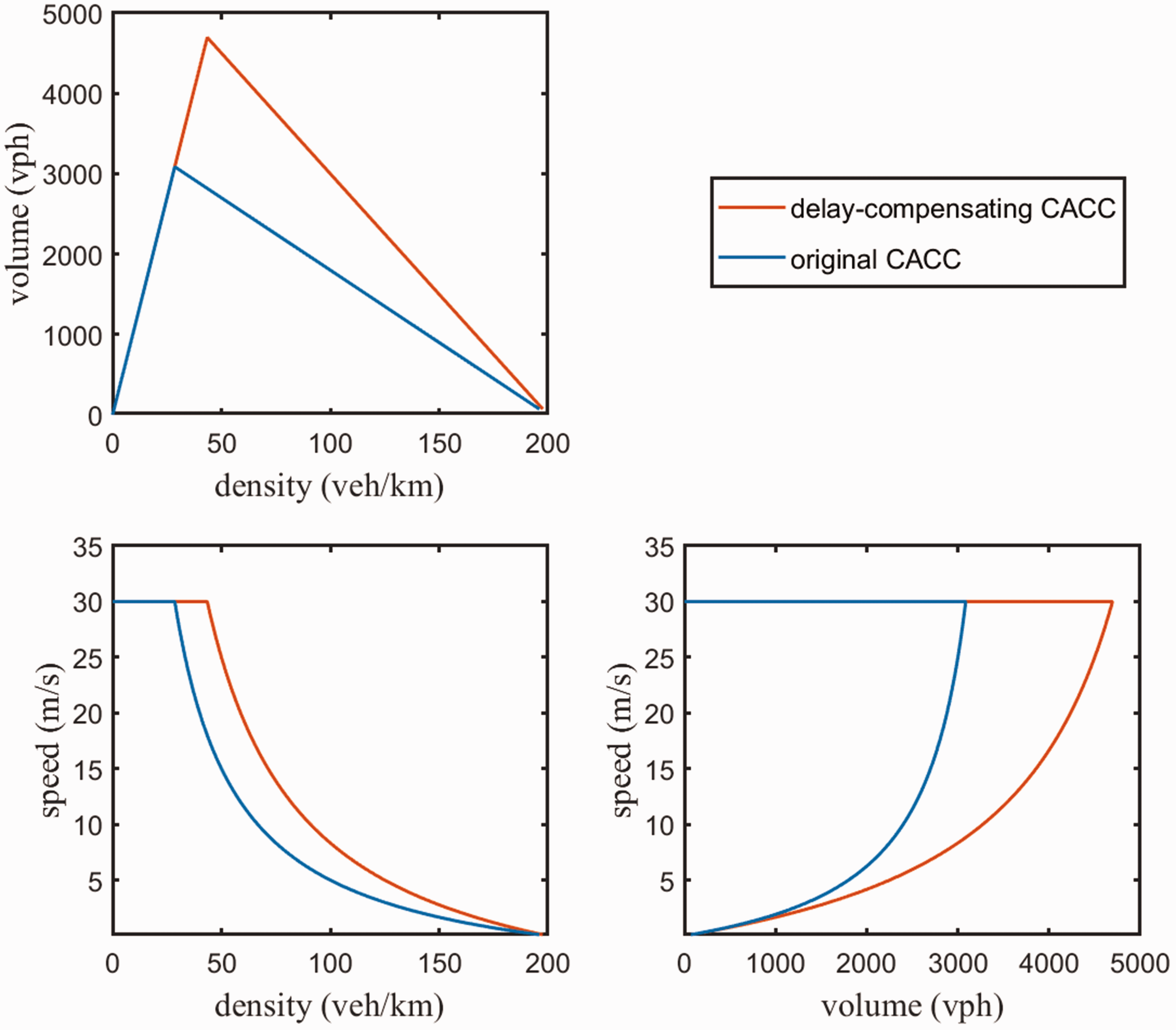
Fundamental diagram of the delay-compensating CACC and the original CACC: the fundamental diagram of the delay-compensating case has a higher critical density than the original case.
Insights from the Delay-Compensating Strategy
Some insights we get from the control design of the delay-compensating CACC are included in this section by revisiting the control logic of the delay-compensating CACC from two different perspectives.
Data synchronizing: The nature of the delay-compensating strategy is not to get rid of communication delay, but to synchronize the data collected by on-board sensors and V2V communication by adding an extra delay to the preceding vehicle’s state (position and speed). This can be clarified by examining the block diagrams. The block diagrams of the original CACC and the proposed delay-compensating CACC are shown in Figure 4, a and b, respectively. There is only one delay component for the preceding vehicle’s control in the original CACC, while there are two for the delay-compensating CACC. The insight here is that it is the lag between different data collecting devices that is detrimental to the CACC’s performance, rather than the delay of any specific data source (note that a similar conclusion was made in [28]). When incorporating data from multiple devices (exactly the case of CAVs), data synchronizing is much more helpful for improving the control effect. This also explains why human-driven vehicles can sometimes keep strong string stability even with very high delay (the average reaction time is 250 ms for visual stimulus) and a low time gap. This shows that humans get information on the preceding vehicle mainly via a single data source, namely visual sense.
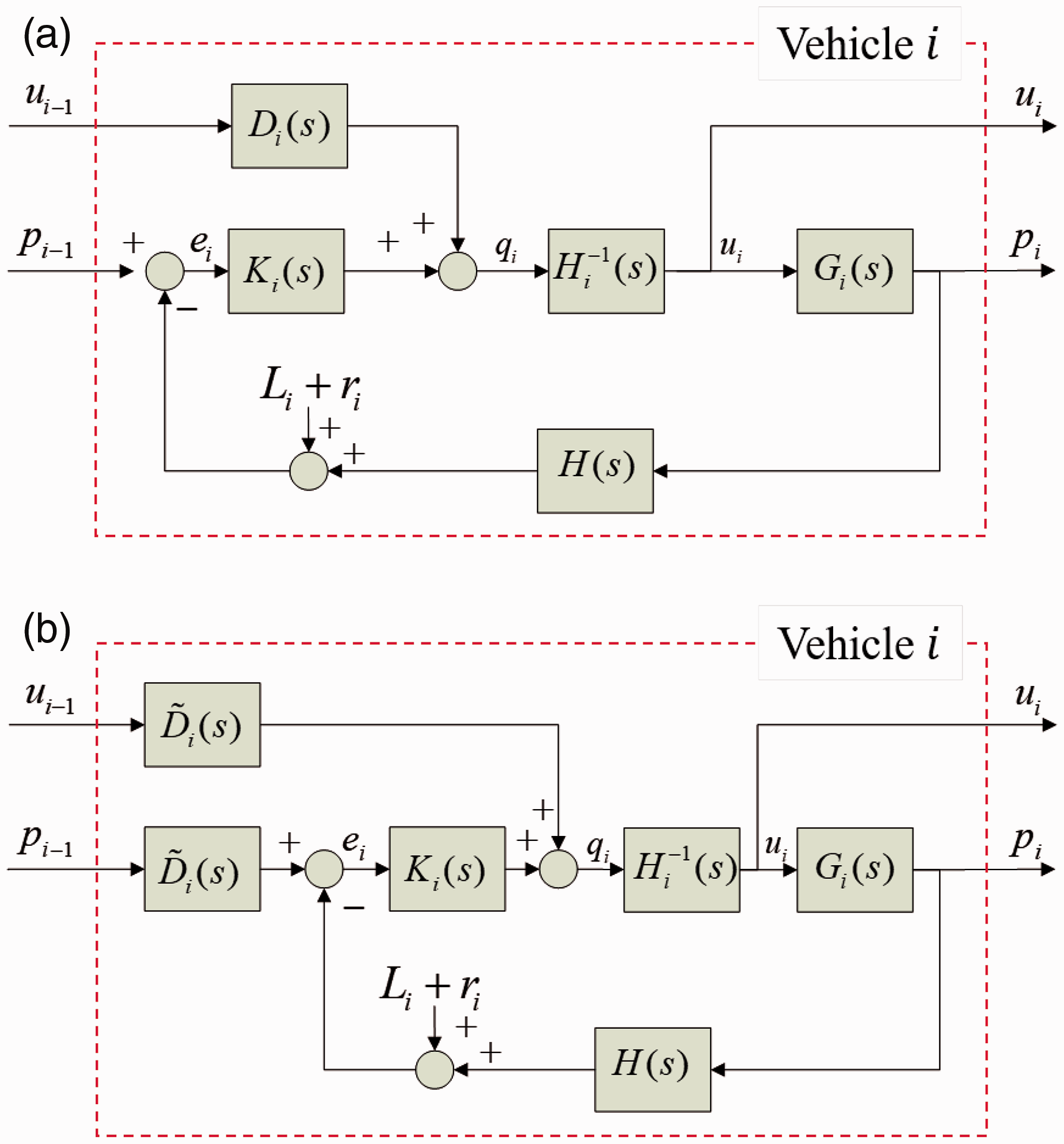
Block diagrams of the original and delay-compensating CACC systems.
Information synthesis: Another perspective to inspect the delay-compensating CACC is to look at the information involved when formulating the desired spacing. While the spacing policy of the original CACC only considers the subject vehicle’s speed (see Equation 2), that of the delay-compensating CACC makes use of the speed of both the subject vehicle and the preceding vehicle (see Equation 4). The implication is that properly synthesizing the status of consecutive vehicles can make CACC systems perform better. Furthermore, it reveals that synthesizing the preceding vehicle’s status by integrating the speed over a period (Equation 4) is a better choice than multiplying the speed by a time gap (Equation 5). If Equation 5 is adopted as the spacing policy, the derived local-stability conditions and string-stability conditions will differ from the ones in the section on theoretical analysis and lead to a larger minimum time gap. Intuitively, the running distance, which is equivalent to the integral of speed over a period, rather than multiplying the speed by a time gap, can be also adopted to construct spacing policy.
Verification
Simulation is carried out in this section to verify the impact of the proposed delay-compensating CACC on local stability, string stability, traffic flow stability, and mobility. The baseline is the original CACC.
Experiment Setting
The simulation scenarios are depicted in Figure 5. Three different scenarios are simulated—straight lane, merging zone, and circuit. Straight lane is simulated with
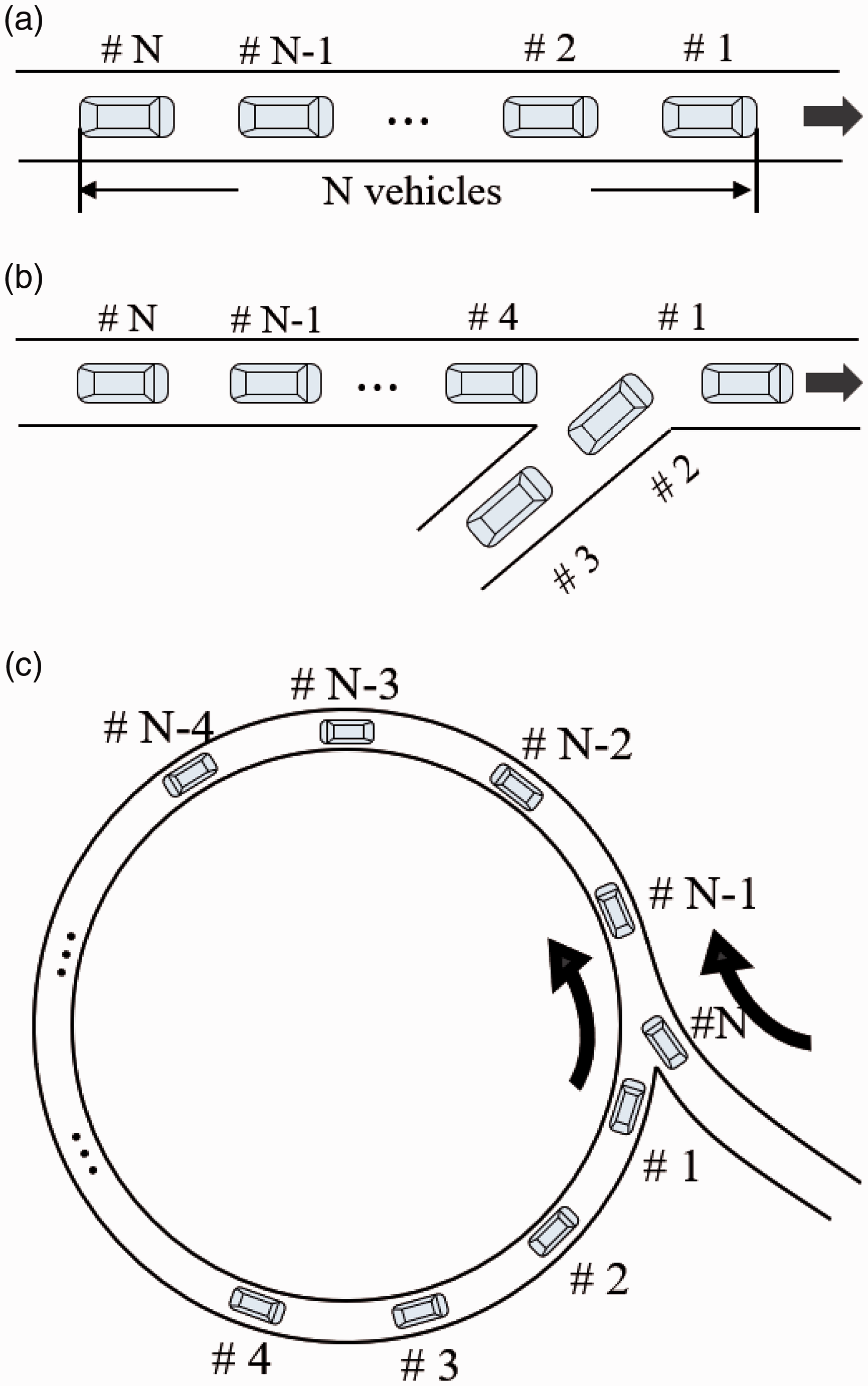
Experiment scenario. (a) Platoon with N vehicles on straight lane, (b) merging zone with two vehicles trying to cut in, and (c) platoon on circuit with one vehicle trying to cut in.
Based on the three scenarios, four sets of simulation are carried out. The four experiments are respectively designed to verify the effect of the delay-compensating CACC on local stability, string stability, traffic flow stability, and mobility. The four experiments are detailed as follows.
Local stability experiment: A string of vehicles is simulated with the lead vehicle keeping constant speed in the whole simulation round. At String stability experiment: A string of vehicles is simulated with stable initial state. The lead vehicle decelerates from 30 m/s to 5 m/s with constant desired deceleration of –1 m/s2. This experiment is designed to verify the positive effect of the delay-compensating CACC on string stability. Traffic flow stability experiment: This experiment is simulated in the merging zone with two on-ramp vehicles cutting in between the lead vehicle and the second vehicle on the main road. The initial distances between vehicles on the main road are 35 m. The lead vehicle keeps constant speed in the whole simulation round. This experiment is designed to verify the positive influence of the delay-compensating CACC on traffic flow stability. Circuit experiment: The circuit scenario is simulated. All the vehicles runs with stable initial state. At
Experiment parameters are as follows.
Simulation resolution: 0.1 s; simulation horizon: 100 s. Experiment Setting Note: CACC = cooperative adaptive cruise control; NA = not available.
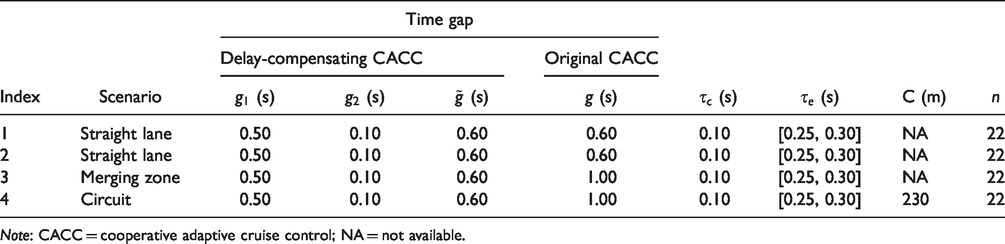
Vehicle properties: vehicle length
Controller parameters (
Measurements of Effectiveness
Measurements associated with fuel consumption, emissions, mobility, and driving stability are examined. Both fuel consumption and emissions are computed by a VT-Micro model (
30
). Mobility is measured by average speed 
Note that increases in average velocity and decreases in other measurements indicate improvements.
Simulation Results
Computed measurements of effectiveness (MOE) are listed in Table 3. The two CACC controllers perform closely in the local stability experiment. However, for the last three experiments, the delay-compensating CACC outperforms the original CACC by a great scale, which shows the benefits of the proposed delay-compensating strategy on fuel efficiency, emissions, mobility, and stability. The simulation results of the four sets of simulation are shown in Figures 6–9. The simulation results conform well with the theoretical analysis. Both the local stability and string stability can be verified. All the three stability criteria are shown to be stronger than that of the original CACC. Furthermore, the robustness of the proposed delay-compensating CACC against uncertainties can also be verified.
Measurements of Effectiveness
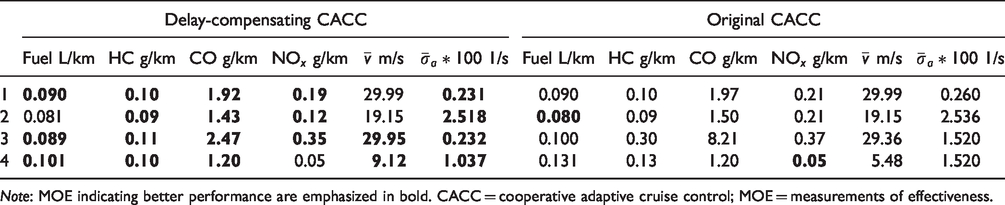
Note: MOE indicating better performance are emphasized in bold. CACC = cooperative adaptive cruise control; MOE = measurements of effectiveness.
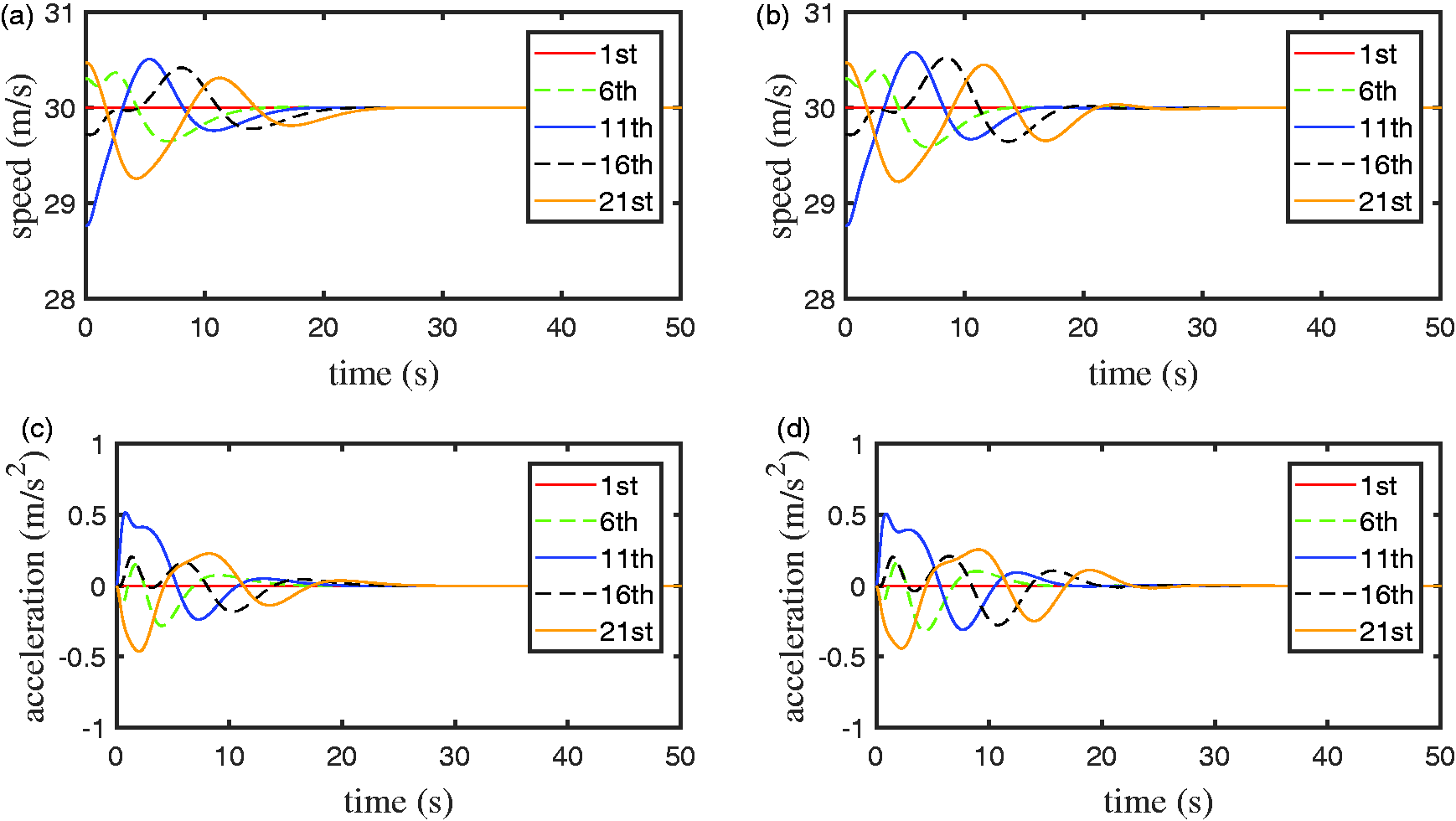
Local stability experiment: the platoon controlled by both the delay-compensating CACC and the original CACC gradually gets back to the stable state; the delay-compensating CACC converges faster, which indicates stronger local stability.
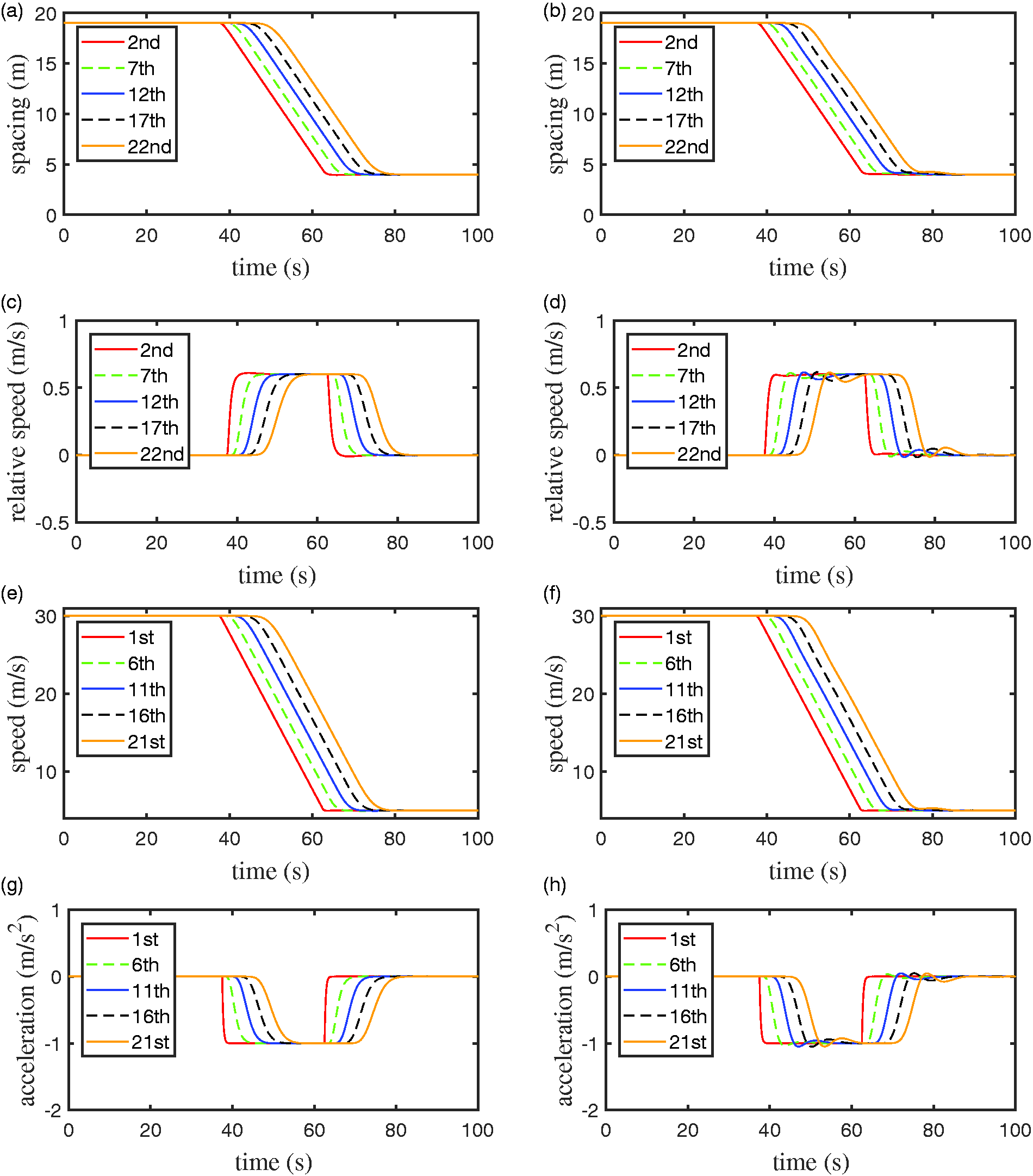
String stability experiment: the delay-compensating CACC is string stable while the original CACC is not.
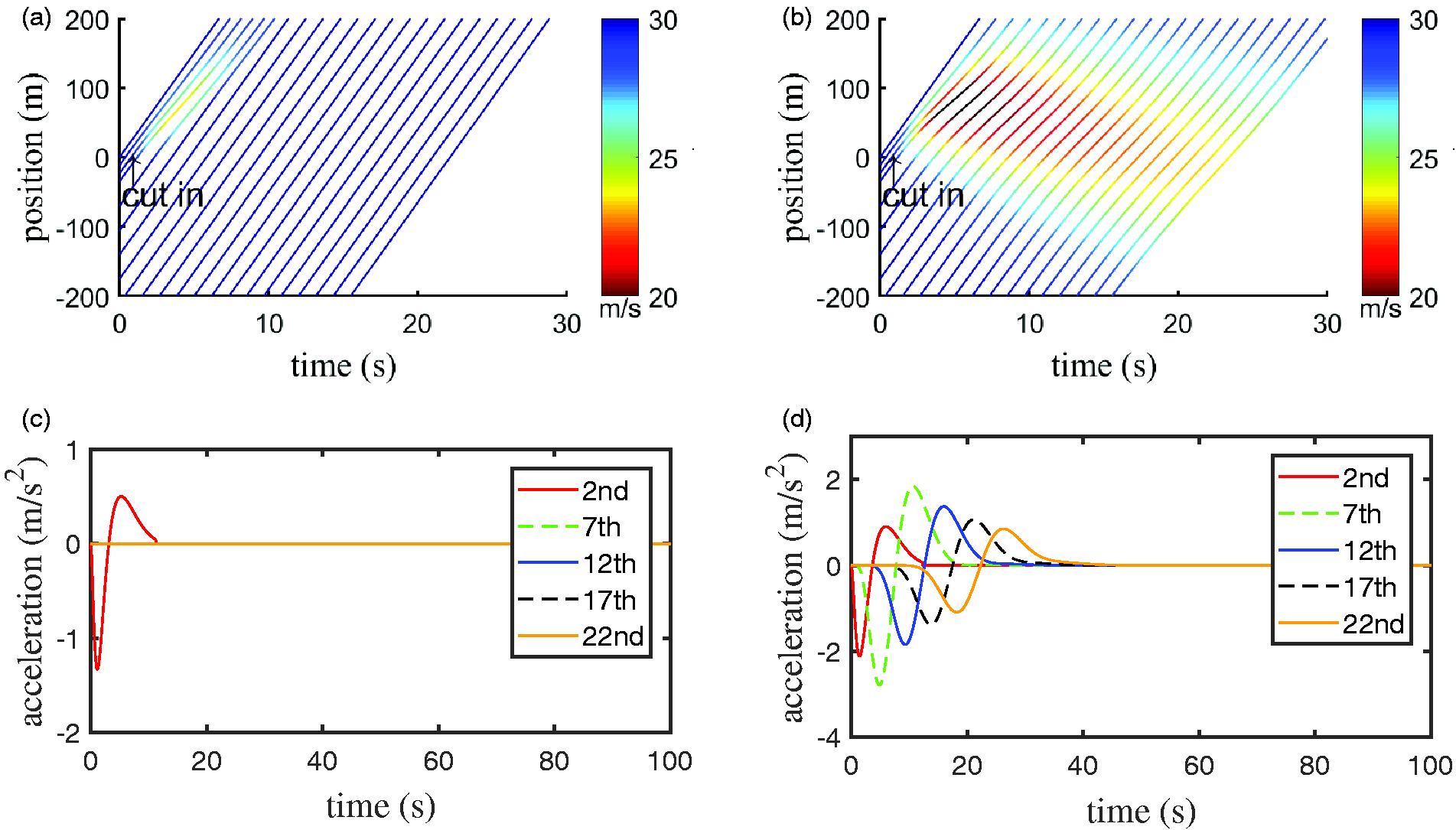
Traffic flow stability experiment: the delay-compensating CACC leads to free flow and the original CACC leads to congested flow. The color map in (a) and (b) represents instantaneous speed.
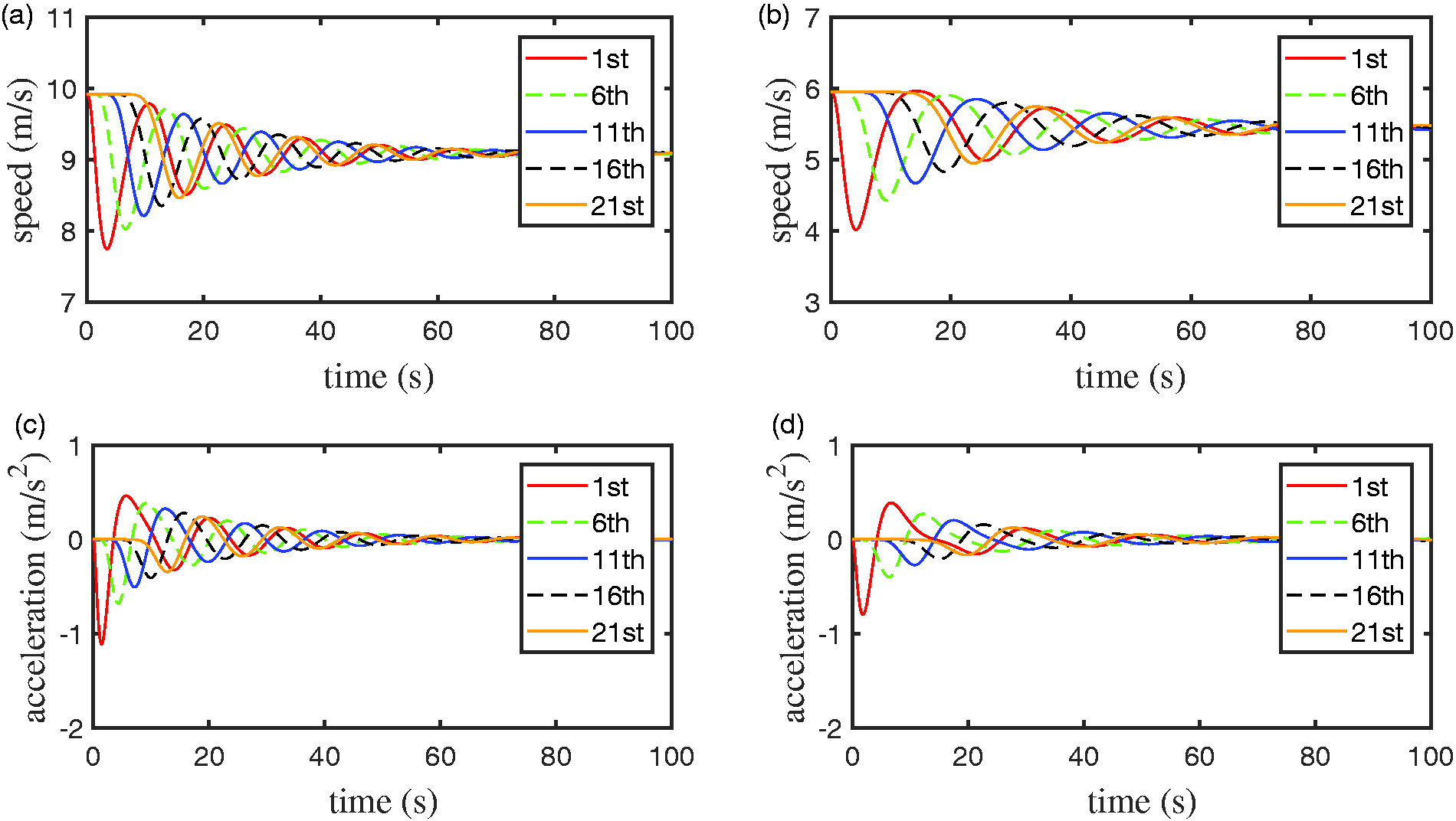
Circuit experiment with cut-in vehicle (circumference: 230 m): the delay-compensating CACC helps to enhance mobility.
For the first set of simulations, the platoon is running with an unstable initial state (as shown in Figure 6). In the first 20 s, the oscillation is much damped and the platoon gradually gets back to a stable state. This shows the local stability of the proposed delay-compensating CACC. Moreover, the response of the delay-compensating CACC is faster. This can be clearly shown by the acceleration/speed profile of the 21-th vehicle, which takes much more time to get back to a stable state.
The second set of simulations shows the different string stability properties of the original CACC and the delay-compensating CACC (see Figure 7). When the leading vehicle decelerates suddenly, the fleet controlled by the original CACC features amplified oscillation in both acceleration and speed when propagating upstream (see Figure 7, f and h), which implies string instability. On the contrary, a string-stable fleet is shown in the delay-compensating case. The maximum deceleration and the speed range of the followers do not exceed those of the leading vehicle. Furthermore, even with uncertainties in vehicle dynamics and sensor delay, the proposed controller still operates in a string-stable way.
The performance of the two controllers are extremely different in the third set of simulations, as shown in Figure 8. For the delay-compensating CACC, after the initial few seconds, all the vehicles get back to a free flow state. But for the original CACC, the speed and acceleration of the vehicles oscillate for a long time. This is partially caused by the low string stability of the original CACC, which makes the oscillation hard to settle down, and partially because of the low traffic flow stability, which cause density/velocity propagating upstream. Notice that in the braking process, the vehicles run with small inter-vehicle spacing while keeping remarkable speed difference, which may lead to rear-end collision in emergent situations. Unfortunately, greater communication delay than the current setting, for example, 0.2 s, will considerably exacerbate the string-instability of the original CACC, thus increasing the collision risk. One limitation of the proposed linear controller, and many widely-used linear CACC controllers, is that it does not handle state constraints. In safety-critical conditions, a collision avoidance system ( 31 ) is needed, which is beyond the scope of this paper. Another way that deals with safety is to use a model predictive control approach ( 15 ).
For the fourth set of simulations (see Figure 9), when the platoon gets back to a stable state, the delay-compensating platoon runs with a stable speed of 9.09 m/s, while the platoon controlled by the original CACC runs at 5.45 m/s. This is in accordance with the fundamental diagram as shown in Figure 3. In the speed-density diagram, a density of 95.65 v/km (1000/230 × 22 = 95.65) corresponds to exactly 9.09 m/s and 5.45 m/s.
Discussion
The merits and disadvantages of the proposed delay-compensating strategy are discussed in this section.
As mentioned before, the first merit of the proposed strategy is the robustness against the uncertainties and heterogeneity in both the communication and actuation delays. In the proposed controller, the communication delays can be time-varying and delays between different vehicle pairs are not necessarily the same. Furthermore, as indicated by the simulation results, neither the uncertainties nor the heterogeneity in the actuation systems have obvious negative effects on the system’s operation.
The second advantage is the ease of implementation. Compared with the prediction-based method ( 20 – 22 ), no prediction of the predecessor’s maneuver or state is required. Compared with the method resorting to incorporating multi-predecessor states ( 16 ), the proposed system only involves the communication between the subject vehicle and the direct predecessor. The distributed communication topology and absence of prediction help to simplify the system’s implementation.
One disadvantage of the proposed method is the higher requirement for memory capacity. Compared with the original CACC ( 8 , 9 ), more memory is required as the proposed method involves past information, which needs to be stored into and retrieved from the local database. Yet, the extra memory expense is acceptable compared with the memory capacity of the state-of-the-art on-board computers. Another limitation of the proposed controller is that it is a linear state-feedback controller and does not handle state constraints. In safety-critical conditions, a collision avoidance system ( 31 ) is needed.
Conclusion
A delay-compensating CACC controller is proposed in this work. The main idea behind the delay-compensating method is to modify the traditional constant time gap policy. By doing so, the minimum time gap required by the CACC system to guarantee string stability can be reduced to be as small as the communication delay, which is much smaller than that of the original CACC. Three stability criteria—local stability, string stability, and traffic flow stability—are respectively analyzed to reveal the merits of the proposed delay-compensating CACC. Detailed analysis reveals that:
The delay-compensating controller can guarantee both local stability and string stability with time gap as small as the communication delay; The local stability, string stability, and traffic flow stability of the delay-compensating CACC are stronger than that of the original CACC; By adopting smaller time gap, the delay-compensating CACC helps to enhance throughput while still attenuating traffic disturbances.
Apart from communication delay, there are two other kinds of delay existing in CACC system—sensor delay and actuator delay. The effects and compensating strategy of these delays are left for future study. Moreover, a generic delay-compensating framework which can be applied to different spacing policies (constant spacing, constant time gap, variable time gap, etc.) and different communication topologies (predecessor-follower, leader-predecessor-follower, etc.) will be covered by future work. Furthermore, the safety effects of the proposed delay-compensating strategy will also be analyzed in future work.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception: Y. Zhang, Y. Bai, J. Hu, M. Wang; controller: Y. Zhang; analysis and interpretation of results: Y. Zhang, M. Wang; draft manuscript preparation: Y. Zhang, M. Wang. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China under Grant number 71871163 and 61803284, National Key R&D Program of China under Grant number 2018YFB1600600, Chinese Scholarship Council (CSC) under Grant number 201806260147, and Research Institute of Highway Fundamental Research Program under Grant number 2018-9060.
Data Accessibility Statement
Data sharing is not applicable to this article as no new data were created or analyzed in this study.