
Abstract
The planning of stop-skipping strategies based on the expected travel times of bus trips has a positive effect in practice only if the traffic conditions during the daily operations do not deviate significantly from those expected. For this reason, we propose a non-deterministic approach which considers the uncertainty of trip travel times and provides stop-skipping strategies which are robust to travel-time variations. In more detail, we show how historical travel-time observations can be integrated into a Genetic Algorithm (GA) that tries to compute a robust stop-skipping strategy for all daily trips of a bus line. The proposed mathematical program of robust stop-skipping at the tactical planning stage is solved using the minimax principle, whereas the GA implementation ensures that improved solutions can be obtained even for high-dimensional problems by avoiding the exhaustive exploration of the solution space. The proposed approach is validated with the use of five months of data from a circular bus line in Singapore demonstrating an improved performance of more than 10% in worst-case scenarios which encourages further investigation of the robust stop-skipping strategy.
The planning of bus operations can be at the strategic, the tactical, or the operational level. Strategic planning determines the layouts of the bus routes and the locations of the bus stops to establish an optimal trade-off between the operators’ and users’ costs (Ibarra-Rojas et al. ( 1 )). Tactical planning comprises the frequency settings stage (Hadas and Shnaiderman ( 2 ), Gkiotsalitis and Cats (3)), the timetable design stage (Sun et al. ( 4 ), Gkiotsalitis and Kumar ( 5 )) and the vehicle/crew scheduling stage (Boyer et al. ( 6 )). Finally, operational planning focuses on determining corrective actions in a dynamic environment for improving the performance of the bus operations. For instance, bus holding (Newell, Hernández et al., Wu et al. ( 7 – 9 )), dispatching time control (Hickman ( 10 ), Gkiotsalitis and Stathopoulos ( 11 )), stop-skipping (Sun and Hickman, Yu et al., Chen et al. ( 12 – 14 )) and short-turning (Zhang et al. ( 15 )) are some of the most commonly used corrective actions employed at the operational planning stage.
Although the holding times of buses at intermediate bus stops are decided during the operational stage, decisions regarding stop-skipping and short-turning can be undertaken at the tactical planning stage (Sidi et al. (
16
)). Deciding which stops should be skipped by a bus trip is a combinatorial problem. As a combinatorial problem, it is NP-Hard prohibiting the computation of a globally optimal solution in polynomial time. For instance, if one bus line has
Because of the exponential growth rate of the solution space, it is not expected to be able to explore the stop-skipping combination options of more than a few daily trips with the use of exact optimization methods. Therefore, finding a globally optimal solution regarding the stop-skippings of the daily trips of a high-frequency bus line (which typically range from 80 to 300 (Gschwender et al., Gkiotsalitis and Cats, Gkiotsalitis and Maslekar ( 18 – 20 )) cannot be guaranteed. In addition, for computing an optimal stop-skipping strategy for the daily trips of a bus line, the travel times of the daily trips should be provided as input. Therefore, if one wants to experiment with different travel-time inputs and generate different stop-skipping strategies for studying the performance of the stop-skipping strategies under different travel-time realizations, then the above-mentioned solution space should be explored repeatedly (i.e., dozens or hundreds of times).
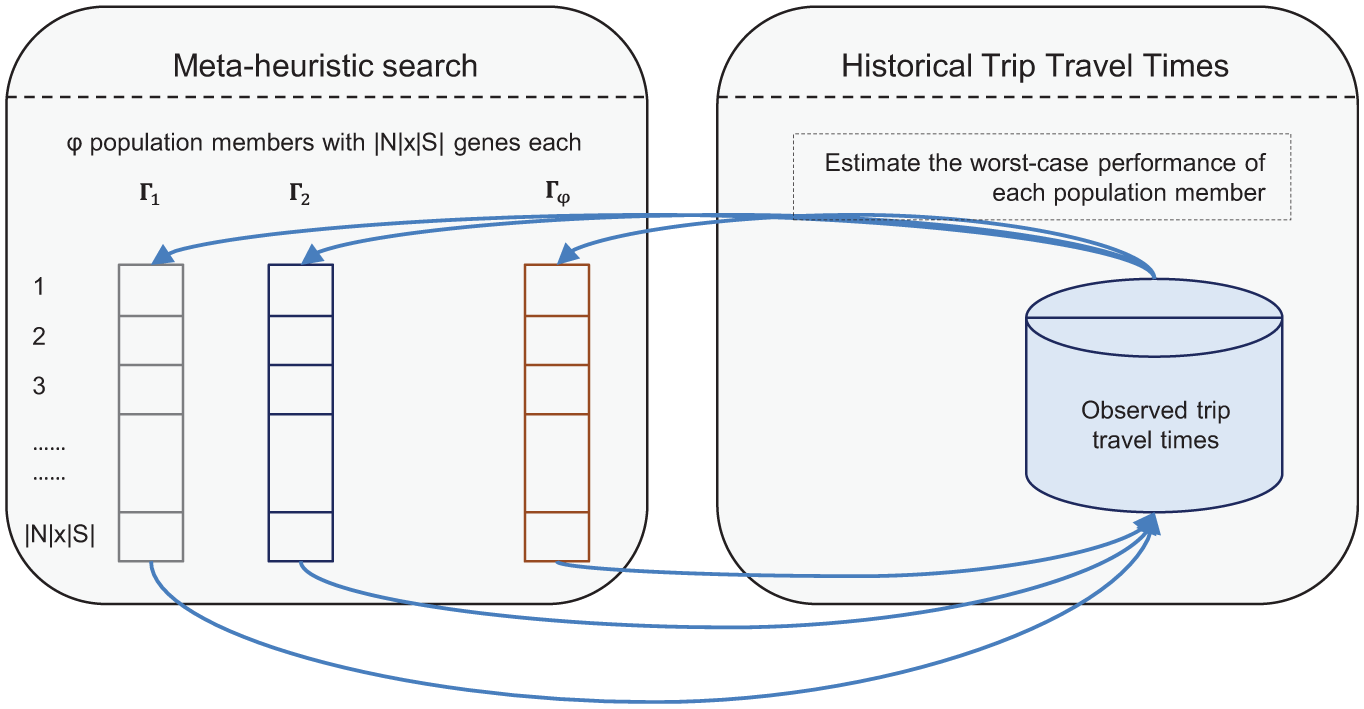
This motivates our work; instead of using exact optimization methods that cannot scale, we use a metaheuristic GA that may provide a sufficiently good solution to the stop-skipping problem by exploring a targeted portion of the solution space. In addition, we couple linear programming with the GA metaheuristic allowing us to discover the worst-possible performances of population members of the GA by performing several experiments with different travel-time disturbances. This enhances the solution-space search of the GA which evolves its population by recombining population members that are more robust to travel-time disturbances (each population member of the GA metaheuristic represents a potential stop-skipping strategy for all daily trips of a bus line as presented in Figure 1).
The metaheuristic GA has several
The main contributions of this paper are:
the adaptation of the model of Fu et al. ( 21 ) which focused on dynamic stop-skipping, to the tactical planning of stop-skipping strategies where the skipped stops by all daily trips of a bus line are determined before the beginning of the daily operations;
the addition of the robust aspect to the stop-skipping problem for favoring the computation of stop-skipping strategies that are robust to travel-time disturbances;
the adaptation of a metaheuristic GA algorithm to use observed travel-time disturbances for deriving worst-case performance estimates for each one of its population members; and
the investigation of the performance of robust stop-skipping solutions in common-case and worst-case scenarios.
Related Works
The decision variables of the stop-skipping problem can take two values (1 if a stop is served and 0 if a stop is skipped) resulting in a binary, 0-1 optimization problem. Previous works have addressed the stop-skipping problem as a dynamic control problem where the skipped stops of a bus trip are decided at the time when the trip starts its service (Fu et al., Li et al., Lin et al., Eberlein (
21
–
24
)). By deciding independently the stop-skippings of each daily trip, the potential stop-skipping combinations are significantly reduced from
Indeed, several works have solved the dynamic stop-skipping problem using exhaustive search methods (see Sun and Hickman, Fu et al. ( 12 , 21 )). Nevertheless, such approaches are reactionary and treat each bus trip independently. Thus, computing the optimal stop-skipping policy for one trip that is about to start its service might affect negatively the performance of the future operations because all bus trips are interconnected. In addition, another reported disadvantage of the dynamic stop-skipping is that passengers are not informed in advance about the stops that will be skipped and might have to wait for at least another time headway to board a bus.
Specifically, Sun and Hickman ( 12 ) formulated a real-time stop-skipping strategy for reacting to disruptions that can occur in the middle of a route as a nonlinear integer programming problem. Their formulation included assumptions of random distributions of passenger boardings and alightings and their solution method was an exhaustive search. Fu et al. ( 21 ) relaxed the dynamic stop-skipping problem by arguing that if a bus trip skips one stop, then the next bus trip has to serve the entire route in order to guarantee a waiting time of at most two headways for passengers waiting at skipped stations. Similarly to the work of Sun and Hickman ( 12 ), Fu et al. ( 21 ) performed a simulation-based sensitivity analysis for analyzing the effect of dynamic stop-skipping to the passenger-related and operational-related costs.
In the PhD thesis of Eberlein ( 25 ), a simplified transit operation environment was developed for deriving stop-skipping solutions analytically. This thesis and the later published work of Eberlein et al. ( 26 ) also studied: (a) the combination of dynamic stop-skipping and bus holding using data from the Massachusetts Bay Transportation Authority (MBTA) Green Line; and (b) the degradation of the optimal solution in the presence of significant stochastic disturbances in the travel times and the headways patterns.
Dynamic stop-skipping has also been combined with short-turning control. Li et al. ( 27 ) considered a real-time scheduling problem where buses may skip many bus stops or turn before the terminus in order to respect the schedule. Given the increased complexity, Li et al. ( 27 ) developed heuristic procedures for providing quick solutions to the real-time stop-skipping/short-turning problem and evaluated the quality of the results using data from Shanghai.
Past works have also combined the dynamic stop-skipping with the bus holding problem (Lin et al., Eberlein, Cortés et al., Sáez et al. ( 23 , 25 , 28 , 29 )). However, including decisions related to the holding of buses at stops increases the complexity of the problem and expands disproportionally the size of the solution space. Cortés et al. ( 28 ) developed a state-space model including the bus position and the expected load and arrival time at stops. The control decisions were applied at discrete events (i.e., when a bus arrives at a bus stop) and given the complexity of the joint dynamic stop-skipping and bus holding problem, a GA-based multi-objective optimization solution method was employed. Sáez et al. ( 29 ) integrated also the two aforementioned strategies (dynamic stop-skipping and holding) and solved the real-time public transport control problem with uncertain passenger demand by formulating it as a hybrid predictive control (HPC) problem.
Given that the real-time control strategies affect some passengers in a negative way (i.e., holding passengers inside a bus, preventing them from boarding), the stop-skipping (also known as expressing) has also been studied at the tactical planning level by determining pre-planned stop-skipping strategies for bus lines (i.e., Jordan and Turnquist, Furth ( 30 , 31 )). Pre-planned deadheading and stop-skipping have been studied by a limited number of authors (see Liu et al. ( 17 )). Furth and Day ( 32 ) and Furth ( 31 ) analyzed the effect of four pre-planned strategies (short-turning, restricted zonal service, semi-restricted zonal service, and stop-skipping) to bus lines with unbalanced demand between directions. More recently, Delle Site and Filippi ( 33 ) proposed an intermediate-level planning of bus operations where short-turnings are pre-planned given the demand patterns over different operational periods, though without analyzing the stop-skipping problem. A similar approach was also proposed by Gkiotsalitis et al. ( 34 ) who introduced the concept of virtual lines for pre-planned short-turnings and interlinings.
One observation and one research gap are identified from the previous studies. The observation is that the stop-skipping problem has been mainly addressed at the operational level and limited attention has been given to the pre-planned stop-skipping case. Elaborating on the research gap, most of the stop-skipping optimization models in the above literature review assumed deterministic travel times and constant headways. An exeption is the work of Liu et al. ( 17 ) which considered travel times as random variables that follow a normal distribution with a constant mean and variance that can be calibrated with the use of automatic vehicle location data. In contrast to the work of Liu et al. ( 17 ), this work does not sample travel-time values following a probability distribution and the proposed robust stop-skipping method considers any travel-time value within a pre-defined set. The advantage of this approach is that we can produce a resilient stop-skipping strategy even if the travel times do not follow a specific probability distribution or many links follow distinctly different probability distributions. Compared with the existing works, we show how linear programming can be integrated into a metaheuristic search for generating robust pre-planned stop-skipping policies for individual bus lines by using the travel-time variability as a direct input to our optimization problem. Further, we show that incorporating past observations into metaheuristic optimization methods can benefit the robustness to the travel-time variations and provide a balanced performance in both common-case and worst-case scenarios.
Model Formulation
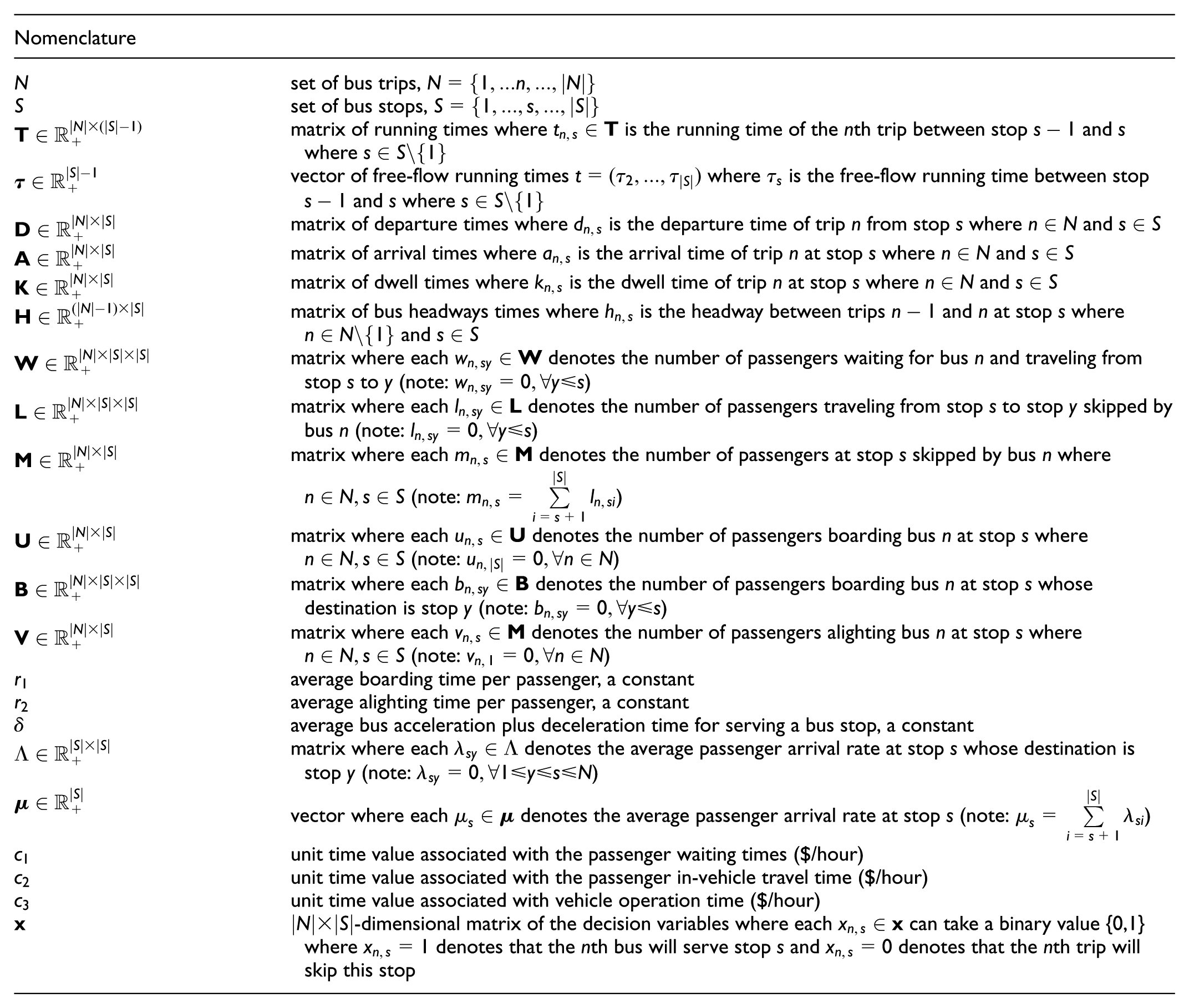
Assumptions and Nomenclature
The modeling part of this work relies on the following assumptions:
(1) Buses that serve the same line do not overtake each other. This is a common assumption in related works (see Xuan et al., Chen et al., Gkiotsalitis and Maslekar ( 35 – 37 )).
(2) Passenger arrivals at stops are random because passengers cannot coordinate their arrivals with the arrival times of buses at high-frequency services (Welding, Randall et al. ( 38 , 39 )).
(3) Passenger demand at skipped stops can be accommodated by the next bus trip of the same line.
(4) Passengers use different door channels for boardings and alightings.
Before proceeding to the modeling, we introduce the following nomenclature:
Vehicle Movement Model
For formulating the state-space vehicle movement model we extend the formulation of Fu et al. ( 21 ) which was focused on the dynamic stop-skipping problem. In more detail, our extended formulation differs from Fu et al. ( 21 ) in the following aspects: (i) it considers all daily trips of a bus line because it focuses on tactical planning; and (ii) it considers uncertain trip travel times (robust stop-skipping).
Compared with the dynamic stop-skipping, pre-planned stop-skipping can offer additional advantages. First, the passengers can be informed about what they should expect before using the service. Furthermore, stop-skipping information can be displayed at a bus stop if an electronic device is installed at the stop or it can be announced by bus drivers so that passengers whose destinations will be skipped do not board the wrong bus. The pre-planned stop-skipping might therefore cause much less confusion than the dynamic stop-skipping strategies.
In the vehicle movement model, the arrival time of bus trips

In addition, the departure time of bus trip

Assuming that overtaking between buses of the same line is not allowed, the departure headway between bus trip

The dwell time of each bus trip

(if passengers use different door channels for boardings/alightings, then, the dwell time can be expressed as
The expected number of passengers who will board bus trip

From the total amount of passengers boarding bus

The expected number of alighting passengers for bus trip

The number of passengers waiting for bus

The number of passengers destined for stop

(Here we assume that passengers waiting to board at stop
Therefore, the number of passengers at stop

Objective Function
Stop-skipping strategies can have several (occasionally conflicting) objectives such as the minimization of passenger waiting times, on-board passenger delays and trip travel times. This yields a binary, multi-objective optimization problem that can be formulated with the use of weight factors
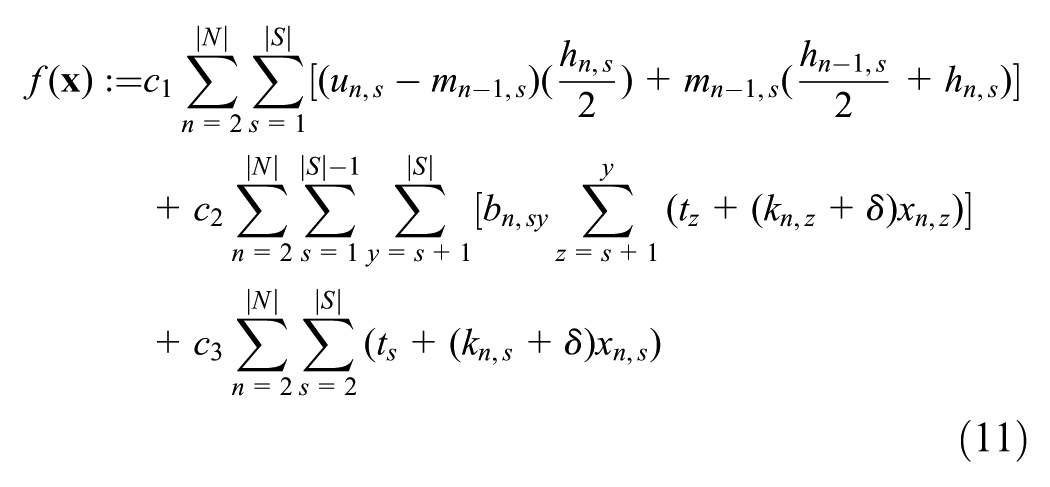
where the first term of the objective function includes two components. The first component,
Incorporating the previously formulated vehicle movement equations, yields the following mathematical program:





Note that the equality constraint of Equation 14 ensures that the first and last stops of a bus trip cannot be skipped and the inequality constraints of Equation 15 that if a bus stop is skipped by one trip, it will be served by its next one.
Formulating the Robust Stop-Skipping Problem
Given the uncertainty of the trip running times, one can apply robust optimization for calculating stop-skipping solutions which are robust to running time variations. Unlike deterministic stop-skipping approaches which cannot maintain their optimality when there are further disturbances along the route, robust stop-skipping can generate stop-skipping strategies which are resilient to real-time changes and still perform adequately in the presence of disruptions. The level of robustness can be typically defined in practice (i.e., in consultation with the bus operator) since solutions which are robust to extreme-case scenarios tend to perform poorly in the average case and vice versa.
In robust optimization, the uncertain parameters (in our case the trip travel times) can take any value within an uncertainty set (see Bertsimas et al. ( 40 )) where the broader the range of this set, the higher the robustness to extreme disturbances. A robust optimization problem is typically addressed in practice by using a minimax decision rule where the objective is to find the solution with the minumum performance loss at worst-case scenarios (Wald ( 41 )).
For computing stop-skipping plans which are robust to the variability of the travel times, one should define the upper and lower limits of the uncertainty sets related to the travel times. Therefore, the following two matrices need to be defined:
Each bus trip
The values of the boundaries,
Modeling the robust stop-skipping as a minimax problem where the objective is to find the stop-skipping plan for each trip
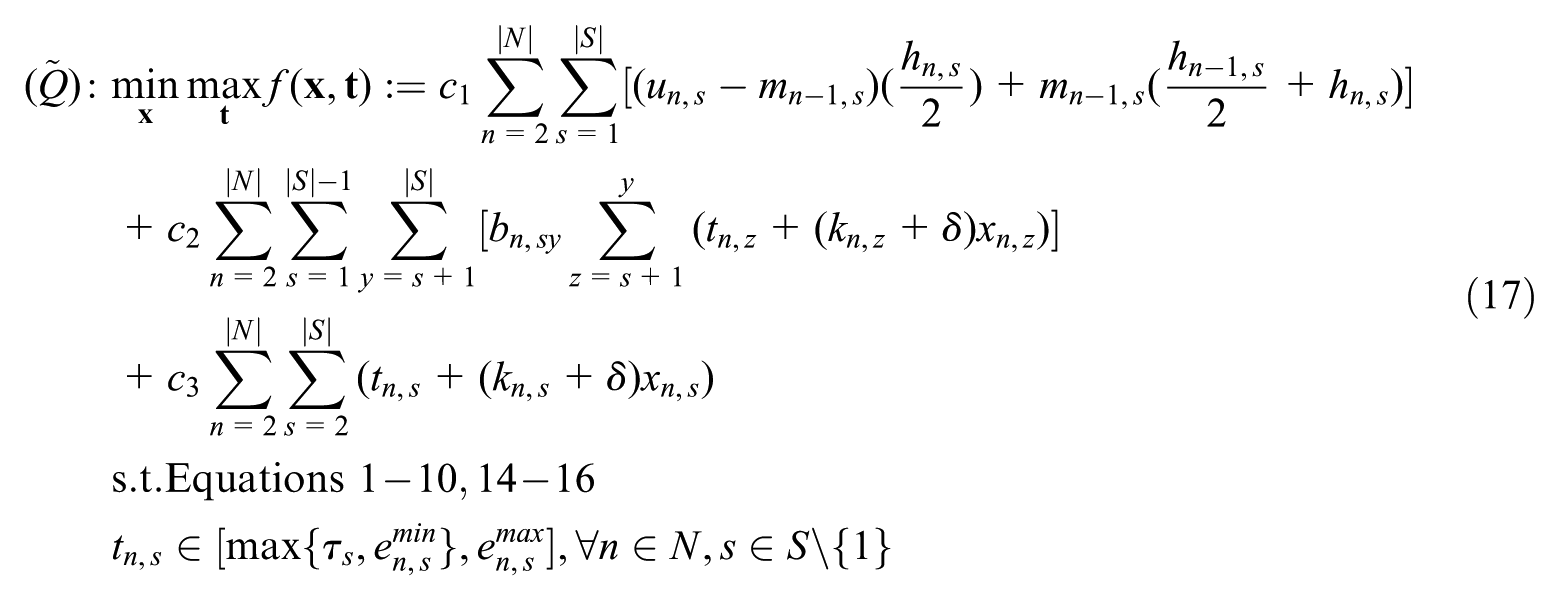
In the mathematical program
Solution Method
The minimax problem of
A Genetic Algorithm-Based Metaheuristic for Converging to a Robust Stop-Skipping Solution
Using a GA we can prevent the oscillation problem since the stop-skipping solutions that perform well under unknown travel-time variabilities will have higher priority to reproduce and evolve into next generations.
A typical GA contains several strings which form the problem population. Each string is a population member and represents a solution to the optimization problem (in our case, each population member is a stop-skipping strategy
A GA requires only the existence of a fitness function which can be evaluated. In the program

which is an easy-to-solve, continuous linear program because: (i) the objective function is a sum of linear functions; and (ii) the decision variables (worst-case travel times for the stop-skipping strategy
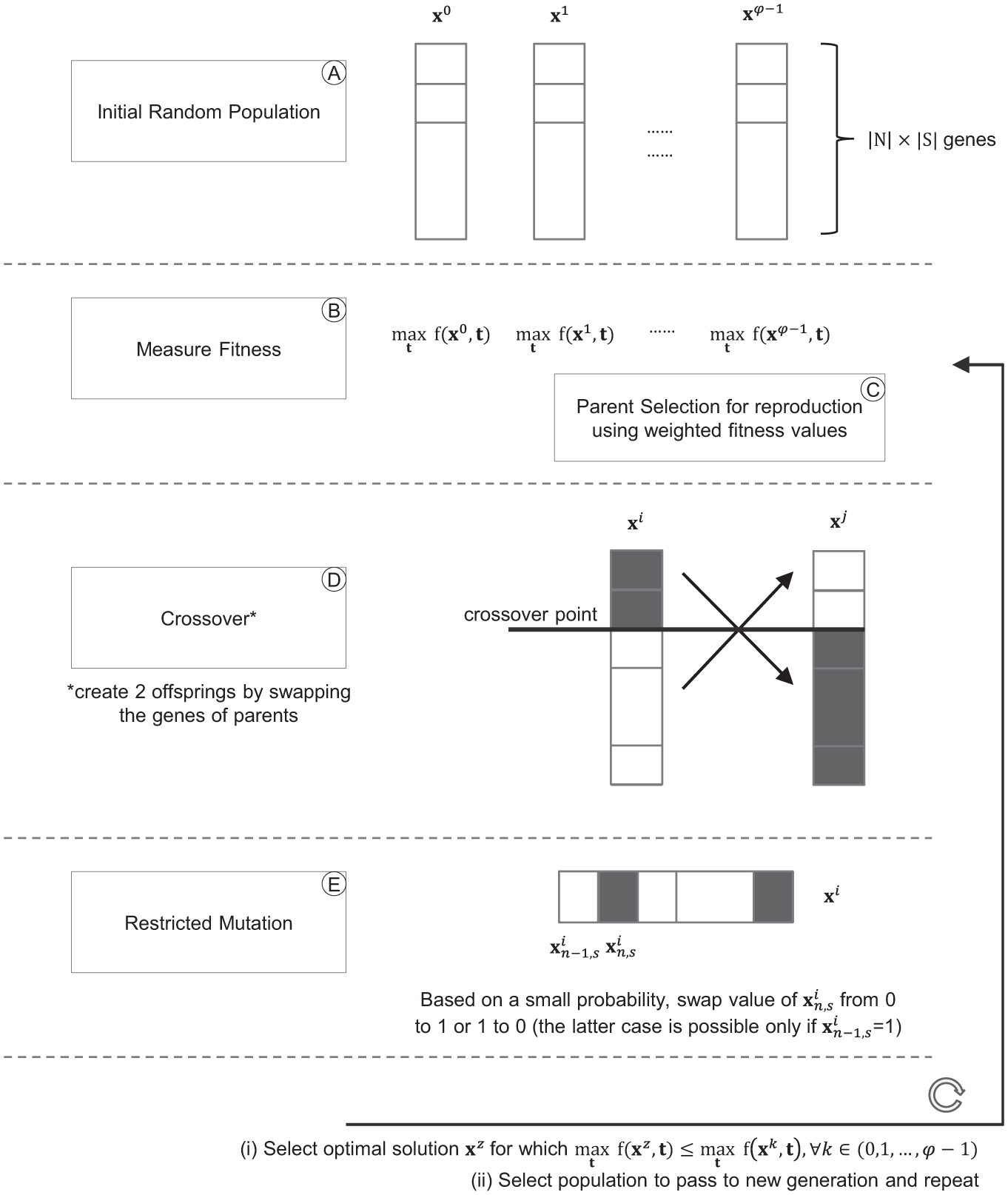
To execute the GA, we need first to define the population size, which is a GA hyperparameter and can be part of the calibration stage. The chromosomes of the initial population (
In the crossover stage, each pair of parents is combined to produce new chromosomes that inherit parts of the genes which belonged to the parent chromosomes. Typically, the genes of the parent chromosomes are exchanged at a single point (the crossover point) for generating offspring via recombination. In the mutation stage, the GA explores new information that does not belong to the pair of parents that were used at the crossover stage. In our case, we allow a very small probability to revert to the stop-skipping option (0-1) which is encoded at each gene of the generated offspring. Note that each population member should satisfy the constraints of Equation 15. To achieve this, the crossover and mutation steps have restrictions which do not allow two consecutive trips
After completing the three stages, a new generation is produced and the GA terminates when the maximum number of generations is reached or if no further improvement is observed. After the termination, the best chromosome represents the currently best solution as presented in Figure 2 and in the following compact algorithm:
Step 0: Select a population size
Step 1: For each population member
Step 2: Select the fittest population members from the set (
Step 3: For each couple of population members that are selected for reproduction, perform the crossover and mutation steps;
Step 4: If the maximum number of population generations is reached or there are no further improvements, STOP;
Step 5: Else: Calculate the incumbent best solution
Genetic algorithm for defining a robust stop-skipping strategy based on the minimax decision rule.
Numerical Experiments
Case Study Description
The case study is a high-frequency circular bus service in Singapore with
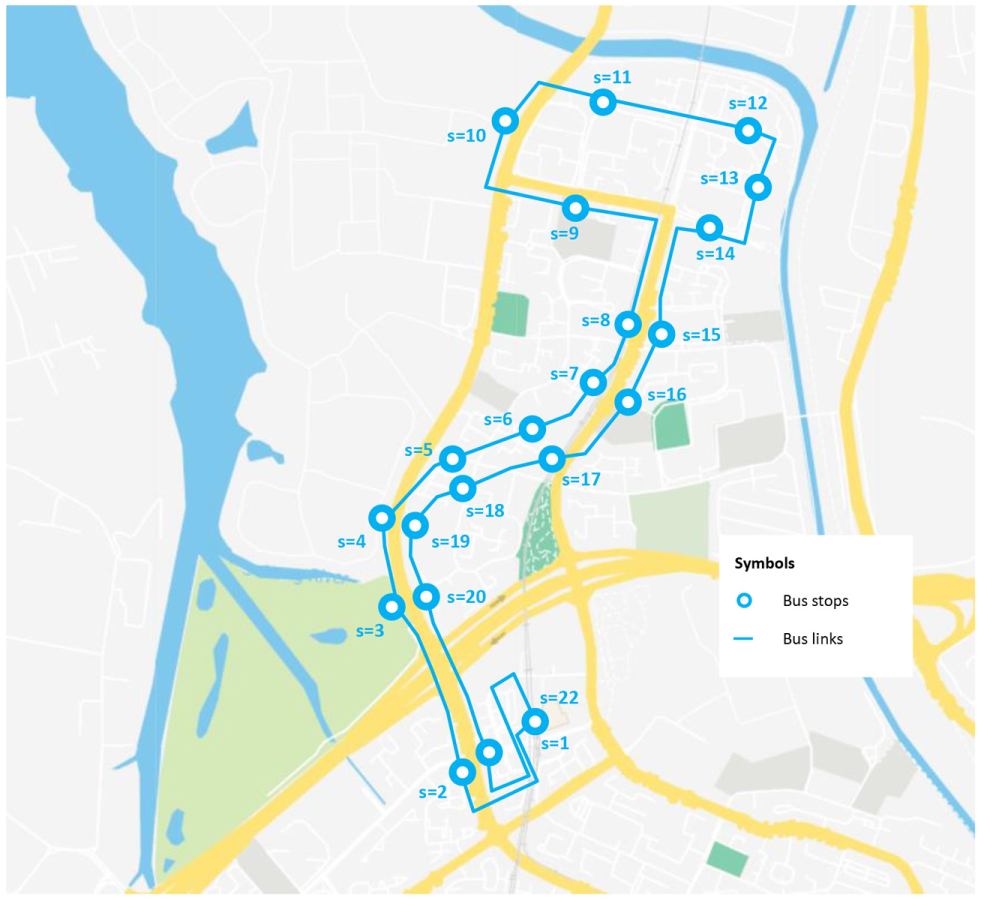
Bus line topology—locations of stops [map source: Google maps].
For illustration purposes, Figure 4 visualizes the upper and lower limits for the link travel times of the first five links as a function of the time of the day. These limits are used to form each uncertainty set,
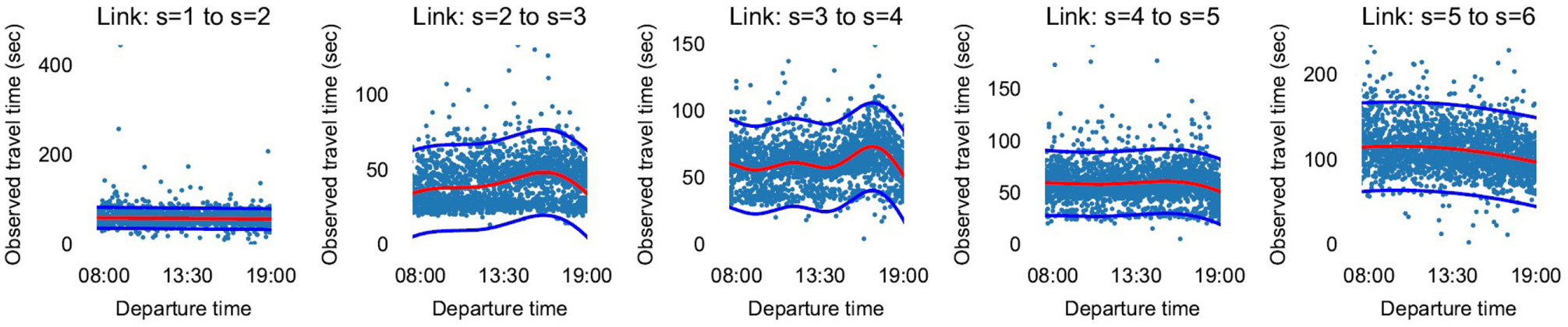
Upper and lower limits (in blue color) of the travel times of the first five links at each time of the day derived from the AVL data records.
Computation of the Robust Stop-Skipping Strategy
In this study we use the same weight factor values for the passenger waiting times, on-board passenger delays and bus trips travel times as in the work of Fu et al. (
21
)—namely,
The objective of the robust stop-skipping problem is to find a solution
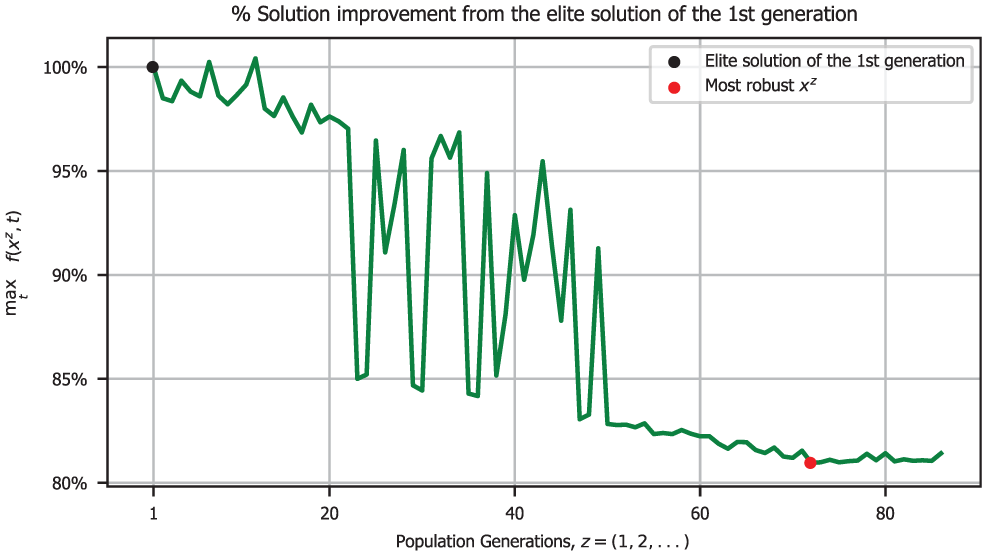
Genetic algorithm population generations and the worst-case performance of the incumbent elite solution
From Figure 5 one can note that at the first iterations the elite solutions of the GA oscillate significantly. However, as the population generations increase, the population of the new generations becomes more homogeneous and all population members have a good performance in scenarios of worst-case travel-time disturbance (thus, avoiding oscillations). This is evident after the 50th population generation where the incumbent best solutions do not improve any further (at least significantly) and their performances stabilize. It should be noted here that the GA does not guarantee global optimality, but an improvement with respect to the initial solution guess.
In Table 1 we summarize the performance of the robust solution
Reduction Percentages when Applying the Robust Stop-Skipping Strategy in the Worst-case Scenario of Travel Time Disturbances
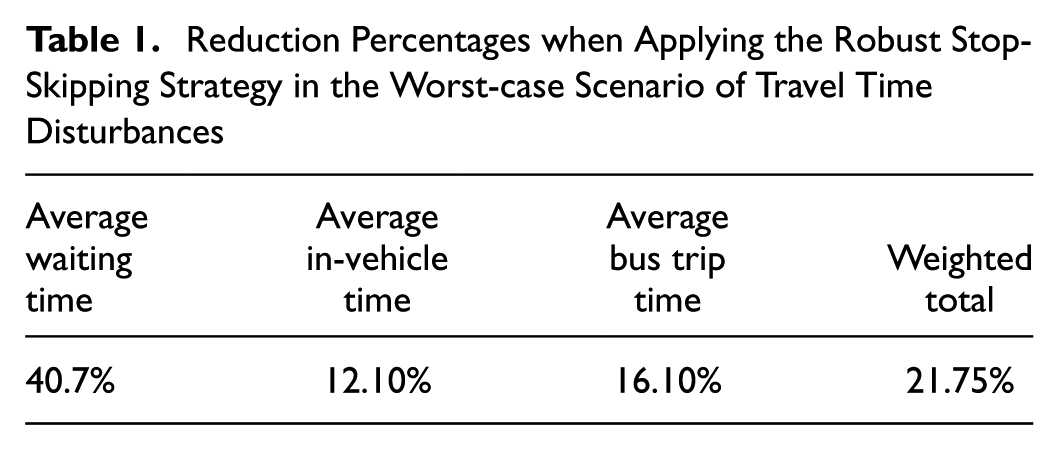
Table 1 demonstrates a significant improvement potential in both the average waiting time and bus trip travel times at the worst-case scenario of travel-time disturbances. This is an expected outcome because our robust solution is appropriate for scenarios with disturbances. A more meaningful evaluation of the robust stop-skipping strategy can be derived when applying the robust strategy in realistic daily operations where only a few link travel times might vary significantly from their expected values. This evaluation is performed in the next section and the results are summarized in the discussion.
Comparative Analysis of the Robust and the Average-Case Stop-Skipping Strategy in Realistic Scenarios
As previously discussed, a robust stop-skipping strategy to an extreme travel-time disturbance level might affect negatively the performance of the service in a typical day with mild disturbances. For this reason, we compute the optimal stop-skipping strategy for the average case by:
using the average link travel time values from the five-month AVL data which are denoted with the red line in Figure 4; and
solving the mathematical program
This yields another stop-skipping solution,
Because of that, we validate the performance of the robust solution
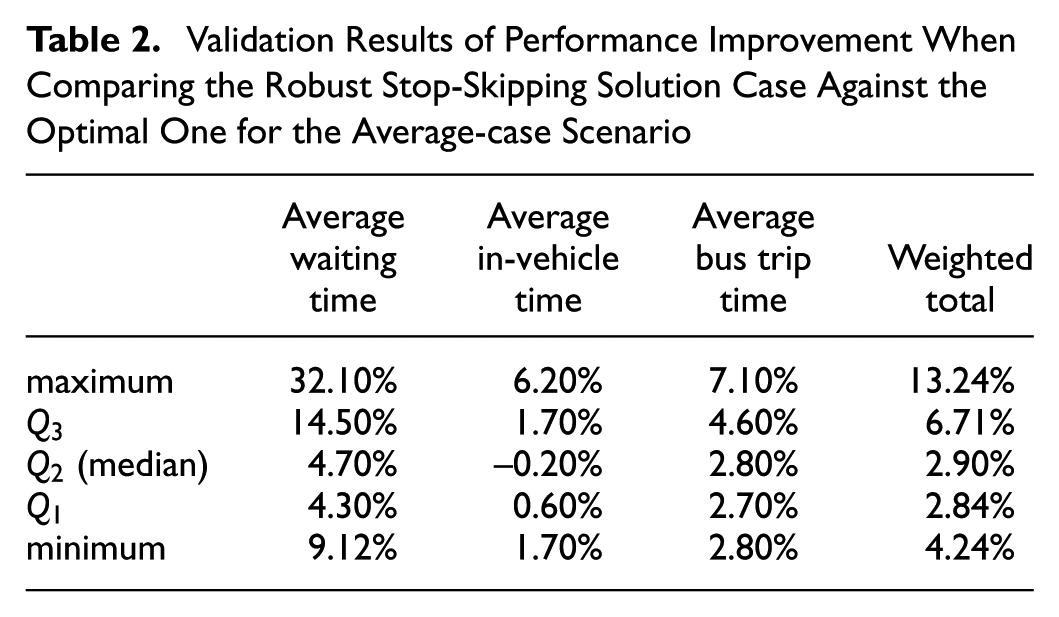
For each one of the daily travel-time realizations that are based on real data observations, we evaluate the performance of the average case and the robust stop-skipping strategy. After performing this procedure for all days, the results are presented in Table 2 using the Tukey boxplot convention where: (i)
Validation Results of Performance Improvement When Comparing the Robust Stop-Skipping Solution Case Against the Optimal One for the Average-case Scenario
Discussion
Summarizing the results from Table 2, applying a robust stop-skipping solution can yield an overall performance improvement of 13.24% in actual operations which are not close to the average case. In contrast, for daily operations which are close to the average case (i.e., average expected day) the robust strategy does not offer a significant improvement (only 2.9%). A logical explanation behind this is that the robust strategy does not try to improve common-case scenarios and does not have a competitive advantage over deterministic stop-skipping strategies that do not consider the travel-time variability. For this reason, bus operators should be aware that there might even be a case where their performance will deteriorate slightly in common-case scenarios when they strive to improve operations in the presence of strong disruptions.
Concluding Remarks
This study investigated the problem of determining stop-skipping strategies at the tactical planning stage which are robust to travel-time variations. Expanding the mathematical program of Fu et al. ( 21 ) which used deterministic travel times for computing only the stop-skipping options of the bus that is about to be dispatched (dynamic stop-skipping), we focused on the determination of the optimal stop-skipping options of all daily trips that yields an NP-Hard problem which cannot be solved to global optimality. In addition, we modified the mathematical program of Fu et al. ( 21 ) so that it can incorporate uncertain travel-time parameters which can take values from uncertainty sets.
The resulting mathematical program proposed in this work is solved with a problem-specific GA that solves numerous linear programming problems internally for evaluating the fitness of each population member at the presence of worst-case travel-time disturbances. The proposed solution approach uses the minimax decision rule to find stop-skipping strategies with better performance in the presence of worst-case travel-time disturbances.
In contrast to the dynamic stop-skipping, stop-skipping at the tactical planning stage cannot adjust to the travel-time disturbances during the actual operations. For this reason, determining robust strategies that perform well in both common-case and worst-case scenarios becomes more important. This aspect was investigated using a five-month dataset and comparing the performance of a robust solution with a set of observed travel-time disturbances against the performance of the average-case stop-skipping solution. The analysis was based on the reasonable assumption that the link travel times of trips are not significantly affected by the stop-skipping strategies because most disturbances are due to road traffic. This analysis showed that robust stop-skipping strategies perform very close to the optimal solutions that consider the average values of the link travel times in most of the cases. This notwithstanding, applying a robust stop-skipping solution can yield a performance improvement of more than 10% in actual operations which are not close to the average case (for such operations, one can expect an improvement in the range of 13.24% according to the results of Table 2).
In future research, one could examine the performance of robust stop-skipping strategies, when the boundaries of the uncertainty sets vary, in order to find a set of solutions that perform well in both worst-case and common-case scenarios. In addition, the effect of stop-skipping to the load levels of the buses can be examined by considering the bus capacity and the optimal bus occupancy. Finally, the impact of pre-planned stop-skipping strategies to the passengers’ trips can be considered as an additional, passenger-based key performance indicator in a broader objective function to avoid reducing the quality of service. This passenger-based key performance indicator can be modeled as a utility function that considers not just the extra waiting times of passengers due to a skipped stop, but also the potential loss of their trip connections and other passenger-related factors.
Footnotes
The Standing Committee on Bus Transit Systems (AP050) peer-reviewed this paper (19-05489).