
Abstract
This paper proposes a method of assigning trips to automated taxis (ATs) and designing the routes of those vehicles in an urban road network, and also considering the traffic congestion caused by this dynamic responsive service. The system is envisioned to provide a seamless door-to-door service within a city area for all passenger origins and destinations. An integer programming model is proposed to define the routing of the vehicles according to a profit maximization function, depending on the dynamic travel times, which varies with the ATs’ flow. This will be especially important when the number of automated vehicles (AVs) circulating on the roads is high enough that their routing will cause delays. This system should be able to serve not only the reserved travel requests, but also some real-time requests. A rolling horizon scheme is used to divide one day into several periods in which both the real-time and the booked demand will be considered together. The model was applied to the real size case study city of Delft, the Netherlands. The results allow assessing of the impact of the ATs movements on traffic congestion and the profitability of the system. From this case-study, it is possible to conclude that taking into account the effect of the vehicle flows on travel time leads to changes in the system profit, the satisfied percentage and the driving distance of the vehicles, which highlights the importance of this type of model in the assessment of the operational effects of ATs in the future.
In recent years, technology development has accelerated the future roll-out of vehicle automation. This technology is expected to have a beneficial impact on travel efficiency, especially on interurban roads. Studies have mostly used micro-simulation tools or mathematical models to estimate the changes in road capacity and congestion under different levels of vehicle automation and cooperation (1–3).
Regarding the use of automated vehicles (AVs) as transit systems, there are currently several projects which are testing the implementation automated pods or buses in pilot experiments. One of the most relevant examples being the CityMobil2 project ( 4 ) in which different field experiments are being run in several European cities. In 2015 the province of Gelderland in the Netherlands started developing a project named WEpods with two self-driving vehicles, which are being tested within the Wageningen University campus, and between the campus and Ede-Wageningen train station ( 5 ).
Several approaches have been proposed to test the effect of transit automation on mobility, especially looking at the combination between traditional taxis and shared use taxi fleets. The automated taxis (ATs) may provide a new type of door-to-door service competing with traditional taxis or even public transport because these new systems would be able to avoid extra manpower costs and make the ATs service cheaper. Two methods are widely used to test the impact of AVs as public transport, agent-based simulation and mathematical optimization. Martinez et al. used agent-based simulation to build a model to test the introduction of 100% autonomous fleets of taxis to satisfy transport demand in a city ( 6 ). Spieser et al. used an analytical mathematical formulation to estimate the number of shared AVs to replace all modes of personal transportation in the case-study city of Singapore ( 7 ). Liang et al. proposed two integer programming models to optimize the service area of ATs for the last mile of train trips. Applying the methods to the real case-study city of Delft, the Netherlands, they concluded that fleet size influences the profitability of the taxi system ( 8 ). Despite these models and their application, they all seem to be limited in having taken into account the effect that the taxis themselves can have on the traffic flow, and hence the delays in the network.
A recent study addressed the traffic assignment of privately owned AVs from the user optimum perspective with the objective of minimizing each family’s own transport costs ( 9 ). An equilibrium convergence was proposed in which households with similar trips should have similar transport costs. Since traffic assignment is a nonlinear problem, this was tackled by an iterative process in which travel times do not change during each assignment of vehicles to trips and to the network. Another study also considered the traffic congestion when studying the routing problem of a large number of shared AVs, in which the traffic flow is modeled through link-transmission model ( 10 ). Then the model is applied to a small network as the considerable computation time means this formulation is not ready to solve the AVs’ dynamic routing problems on a real size network.
In this paper, a model is proposed to address the problem of assigning the vehicles to clients and to paths on the urban road network. The model should consider dynamic travel times, which vary with the flow of the ATs. Moreover, it does not only serve reserved requests, but also some real-time requests. A rolling horizon scheme is proposed in which an optimization problem is solved over several horizons with updated demand. This approach advantage is two-fold: it helps reduce the problem size and it allows for adaption of the supply to the real-time demand.
Rolling horizon is a standard solution methodology for the dynamic vehicle routing problem (
11
). It is achieved by repeatedly solving a static problem over the events that have occurred from the current time
The paper is organized as follows. Firstly, it introduces the mathematical model for assigning the passengers’ requests to ATs and searching the optimal vehicle routing solutions. Secondly, the rolling horizon scheme is described to deal with the reserved and real-time requests. Then the application to the case-study city of Delft is presented, which is followed by the results of comparing the running of the model with and without congestion. The paper ends with the main conclusions that can be taken from the model application.
Integer Programming Model
This section describes a linear programming model for which the objective is to determine the optimal vehicle routing of the ATs system. A private taxi service can serve any pair of nodes within the city road network in which it is assumed that there is no background traffic flow, meaning the flow is generated only by the ATs themselves. Clients use an online app to book ATs providing travel information that includes the origin, the destination and the desired departure time. The model works on the assumption that the taxi company can achieve total control of the system by being free to accept or reject requests according to a profit maximization objective. It is assumed that the system accepts only individual trips for each vehicle. The model sets, data, parameters and mathematical formulation are shown below.
Sets
Data
Parameters
Decision Variables
Objective Function
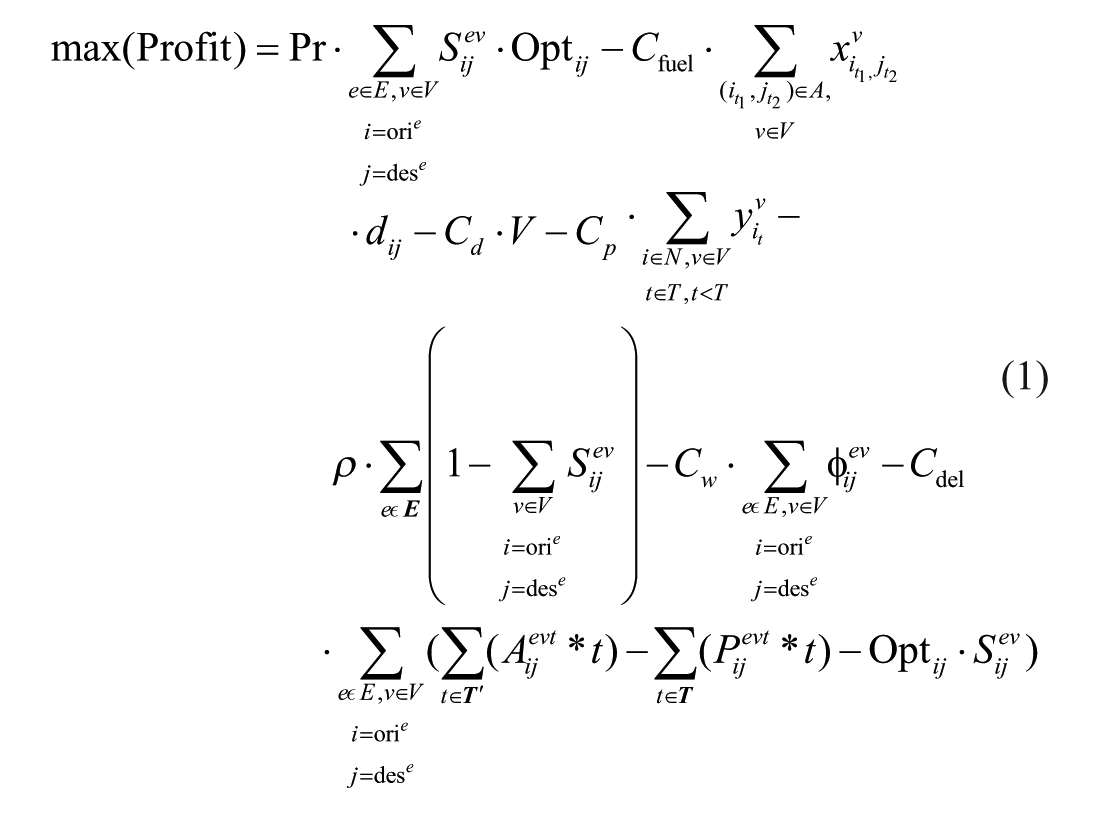
The objective function is considered from the perspective of both the ATs company and the passenger. For the ATs company, it aims to maximize the total profit which includes the total revenue from the customers, the vehicle fuel costs, the vehicle depreciation costs and the parking costs. The revenue is only charged for the shortest travel time of each request to avoid extra detours to charge more to the client. Regarding the passengers, when a request is rejected, passengers are assumed to use public transport as an alternative to finish their trip and the ATs system should pay a fixed charge for the users as a penalty. Late arrival and delivery delay are also penalized to consider the level of service offered to the clients.
Subject to the Following Constraints
The constraints given in Equation 2 describe that trip

The constraints given in Equation 3 describe that trip

The constraints given in Equation 4 assure that a satisfied trip must have only one departure time or this trip is not satisfied at all:

The constraints given in Equation 5 guarantee that one trip can only have one departure time when it is served or this trip is not satisfied by any vehicle:

The constraints given in Equation 6 assure that a satisfied trip must have only one arrival time or this trip is not satisfied at all:

The constraints given in Equation 7 guarantee that one trip can only have one arrival time when it is served or this trip is not satisfied by any vehicle:

The constraints given in Equation 8 compute the difference between the desired departure time and the real departure time, which is the passengers’ waiting time:

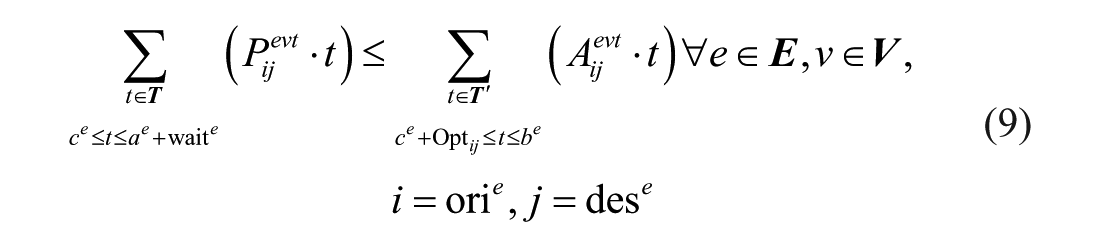
The constraints given in Equation 9 impose that the departure time instant of a satisfied trip must happen before the arrival time instant:
The constraints given in Equation 10 ensure that a trip can only be served by one vehicle:

The constraints given in Equation 11 impose that for a specific time step

The constraints given in Equation 12 guarantee that one trip with a specific origin and departure time can only have one destination and one arrival time:

The constraints given in Equation 13 ensure that each vehicle can only have one status at time instant

The constraints given in Equation 14 are flow conservation constraint which make sure that the number of taxis leaving from node

The constraints given in Equation 15 describe the initial status of the ATs fleet. At the beginning of the operation period, all vehicles are stocked at the central parking station:

The constraints given in Equation 16 compute the flow of vehicles in each road link

The constraints given in Equation 17 limit the flow to the capacity of each link:

The constraints given in Equations 18 and 19 impose a break-point


The constraints given in Equation 20 define the travel time on road link

The constraints given in Equations 21 and 22 impose that the travel time is not greater than the maximum travel time or smaller than the minimum travel time. Meanwhile, they also guarantee that when vehicle


The constraints given in Equation 23 guarantees link consistency. It is assumed that vehicles entering on a link

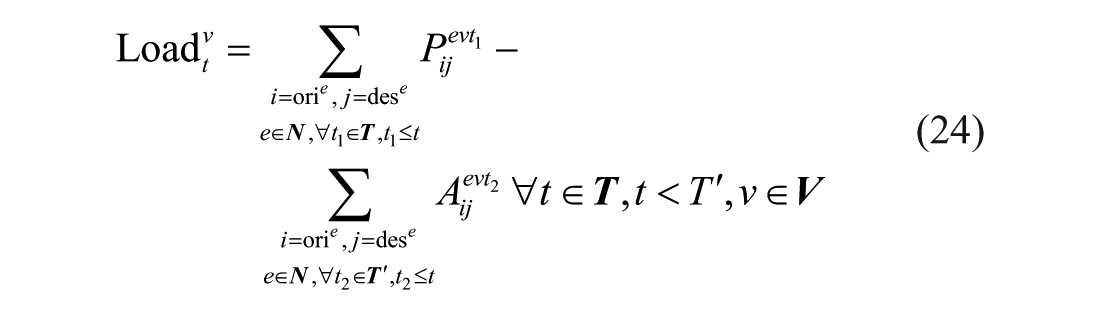
The constraints given in Equation 24 compute the number of passengers loaded on each vehicle during time step
The constraints given in Equation 25 enforce that only one passenger can be in each vehicle. In addition, when the vehicle is transporting passengers, it should not park at any node of the road network:

Rolling Horizon
The mathematical model described in the previous section entails knowing all the demand before the optimization. This means all taxi system users should reserve this transport service and provide all the travel information including the origin, the destination, and the departure time beforehand. Therefore, it would be impossible to change the movement of the ATs and serve real-time demand. Using a rolling horizon scheme, it is possible to consider those requests and at the same time reduce the complexity of the model that was proposed above.
Rolling Horizon Scheme
A rolling horizon scheme is used to divide one day into several horizons in which both the real-time and the pre-booked demand are considered. Model constraints given in Equations 1–25 are run for every horizon with updated demand from the previous. The horizon rolls forward with a specific rolling length and arrives at the next horizon with updated ATs requests. In this section,
The rolling horizon scheme is shown in Figure 1. For horizon 1, the system collects the reserved requests which have the desired departure time within the time horizon 0 to
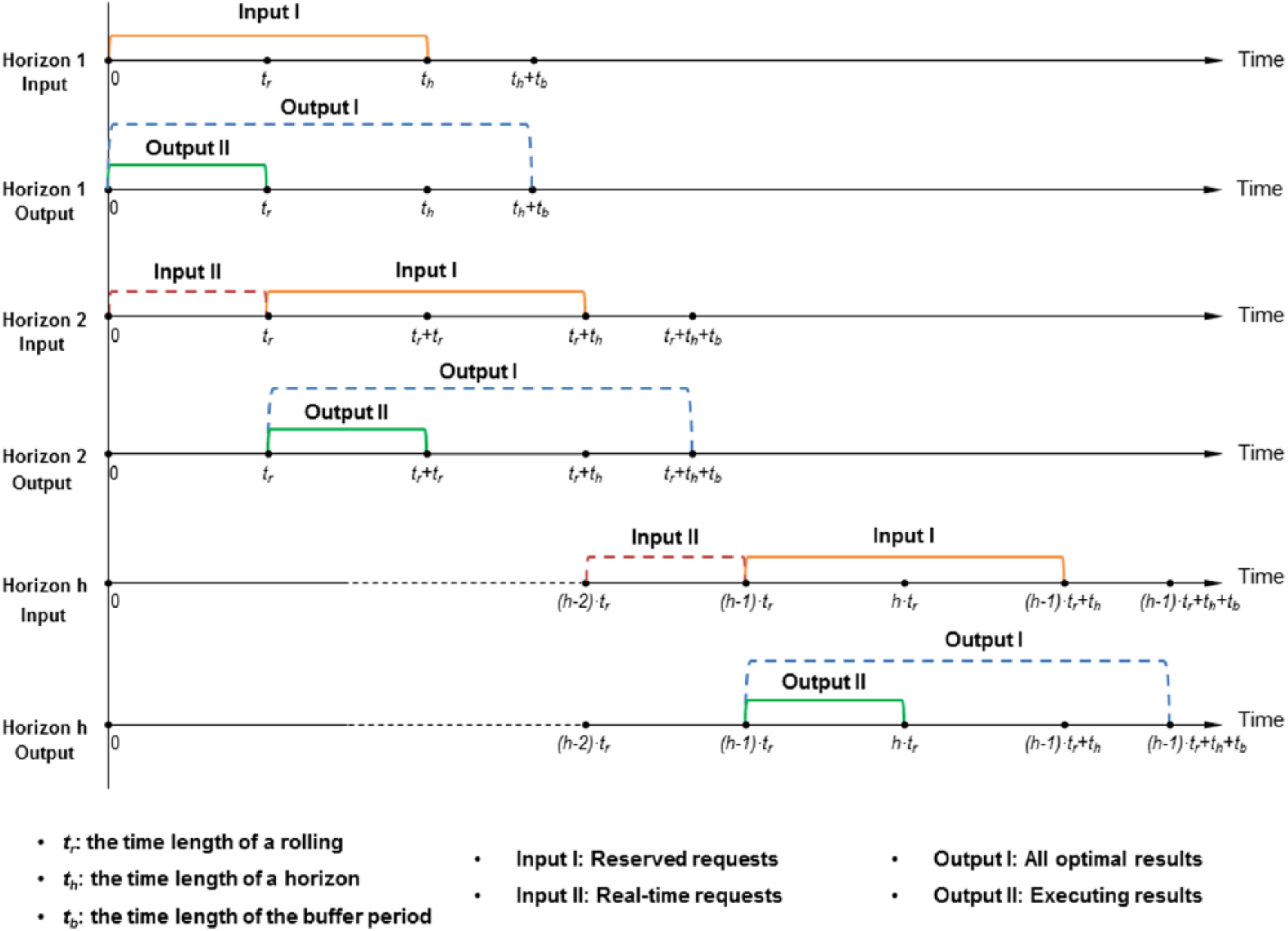
Rolling horizon scheme.
The rolling length and the horizon length can be explained from a practical perspective. This rolling horizon scheme is able to optimize the ATs’ routing time after time with real-time information. The horizon length determines how far the system will include the pre-known information: the reserved taxi service requests. The rolling length indicates how often the system will input the new requests, update the optimal results and execute the routing plan. The rolling length is set shorter than the horizon length because the system can plan for the future requests and update once new requests enter. If the horizon is as short as a rolling length, the system cannot relocate for the next horizon trip, which may decrease the system efficiency. If the rolling is as long as the horizon, the real-time request clients may wait for a whole horizon to be calculated for optimization.
Demand Initialization
Different time components for reserved and real-time requests are set to initialize the system demand. The reserved requests arrive in advance before the horizon start time. No waiting time is allowed to provide a better service for these clients. This means the system should serve them as they require. As a result, the desired departure time is also the earliest departure time for this kind of demand. For the real-time requests, the time they make requests is the desired departure time. Therefore, this model allows some waiting time for each request to be served by ATs as these requests are only analyzed in the next horizon. The earliest departure time is the start time of the current horizon. In this model, the maximum waiting time is set equal to the time length for rolling.
For horizon
Continuity
There are three types of satisfied trips in each optimization horizon which can be handled in different ways in the rolling horizon scheme (Figure 2). If the optimal departure time and the arrival time for each request are both within the executing period (from
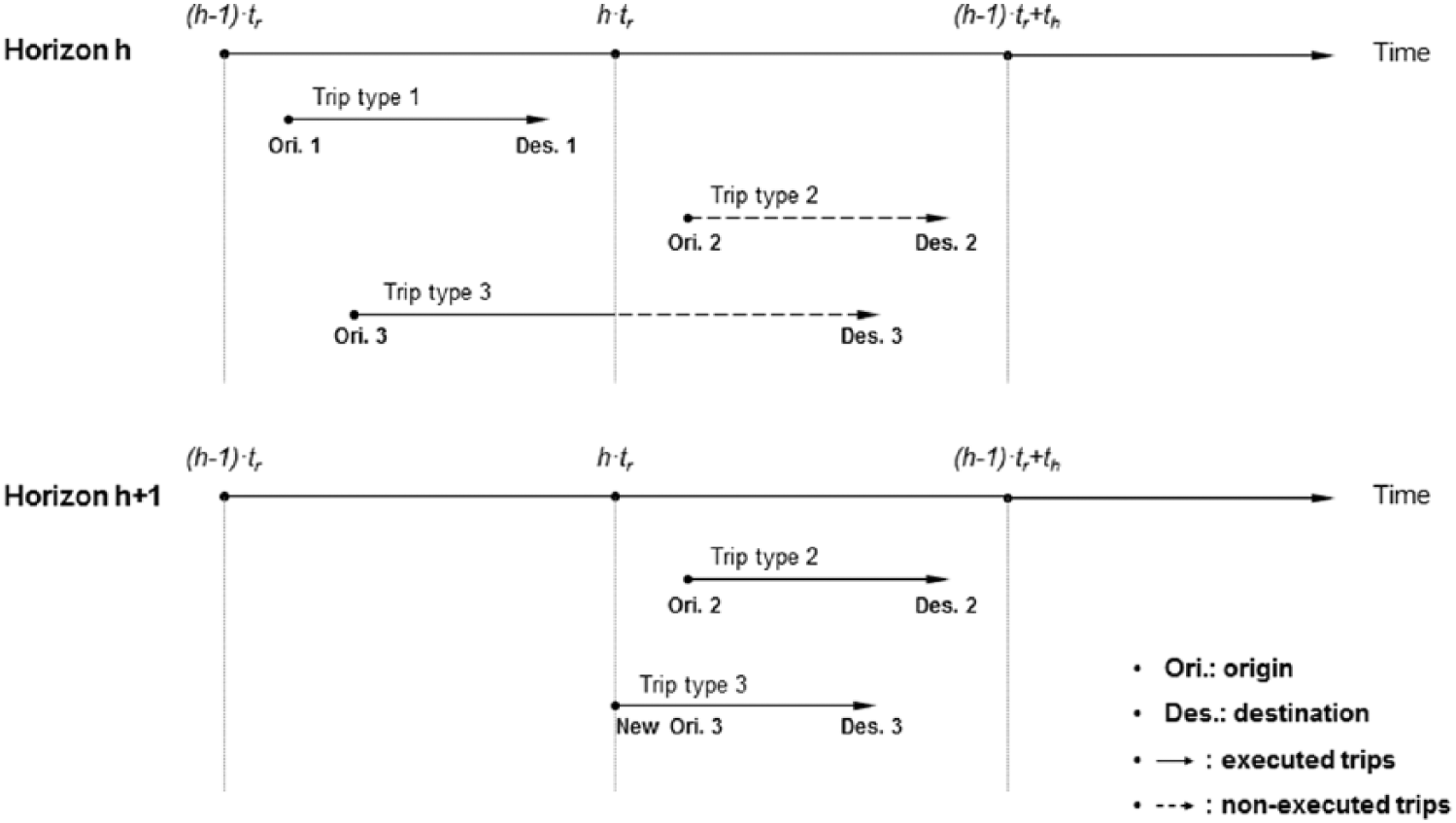
Trips between horizons.
When obtaining the optimal results from the previous horizon, some new notations are used to save the system status information, and set them as a starting point for the next horizon:
The equations below are used to save the vehicle status information from the previous horizon:
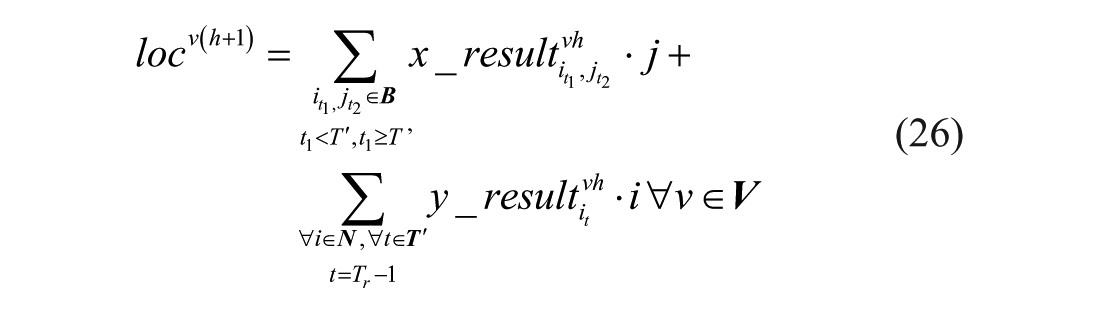
Equation (26) computes the final location of vehicle
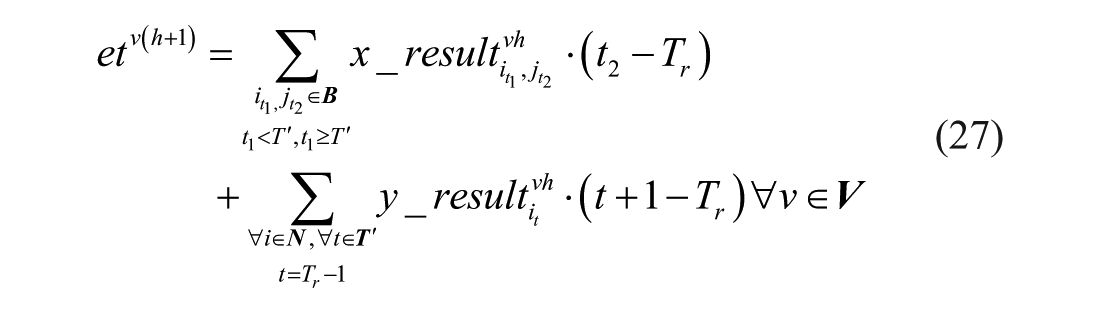
Equation (27) is equal to 0 if vehicle

Equation (28) indicate which vehicle serves the
The value of
New desired information should be loaded into the half executed requests. Firstly, the system should assign a new origin to request
Based on the model constraints in Equations 1–25 and the system status of the previous horizon, this section renovates the model to guarantee the continuity between sequential horizons.
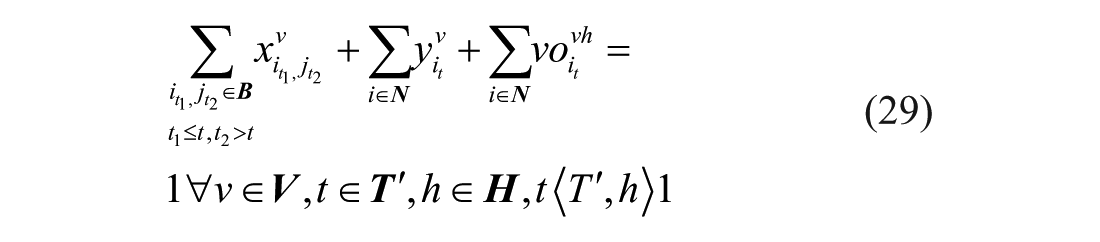
The constraints given in Equation 29 are modified from those given in Equation 13, which indicate that ATs can only have one out of three statuses: going to the next destination, parking at the current node or driving on a trip from the previous horizon,
The constraints given in Equation 30 are an updated version of those given in Equation 14. Vehicles arriving at

The constraints given in Equation 31 impose that all the vehicles must start from the same location as they end in the previous horizon:

The constraints given in Equation 32 guarantee that the half executed requests in the last horizon must be served by the same vehicle in the current horizon:

Case Study and Results
The model is applied to the case-study city of Delft, which is located in the Netherlands, having a total area of 24 km2, and a population of about 100,000.
Demand
To apply the model for studying the ATs system in the city of Delft, the following data are needed:
1. The information of the requests;
2. The price and cost of running the system;
3. The road network information of Delft.
The mobility data were obtained from the Dutch mobility dataset (MON 2007/2008) and transformed in the study of Correia and van Arem ( 9 ). These data include the origin and destination, travel mode, departure and arrival time, which is the required information to apply the model in this paper and can be freely obtained online ( 16 ).
The survey sample includes 68,640 requests which were made by residents who travelled only within the city of Delft during the surveyed day. For this application, only the trips done by cars and taxis are considered. A total of 22,240 trips resulted which are represented by 1112 requests in the operation day (expansion coefficient
According to the time distribution of all the requests, the earliest trip started at 06:48 and the latest trip at 23:35. 06:30–24:00 is chosen as the operation period of the ATs service. The time step of the optimization is 2.5 min. Each horizon contains 12 time steps (
The cost values considered are as follows:
The penalty for unsatisfied reserved and real-time requests are given different values, which is mainly because the system should give priority to reservations.
The parking outside of Delft city center is free of charge. ATs cannot park in the city center (nodes 28, 4, 3, 44 and 9), but they are able to deliver passengers there and leave immediately. This is based on the parking regulations in the city of Delft.
Road Network
The network has 66 road links and 46 nodes. Some of the links have one lane per way and some have two lanes. The capacities were considered as 1600 and 3200 vehicles per hour per direction based on the number of lanes on that link. The maximum speeds were assumed to be 50 and 70 km/h, respectively, for the lower and higher capacity links.
The minimum travel time
The shortest travel time between the nodes (only for which there is demand) is computed by the shortest path method with free flow travel time (
Results
The optimization model was run in an i5 processor @3.10 GHz, 12.00 GB RAM computer under a Windows 7 64-bit operating system by Xpress, an optimization tool that uses advanced branch-and-cut algorithms for solving integer programming problems.
Two kinds of scenarios are considered. The first one, which is called dynamic travel time, considers the travel time as a function of the taxis traffic flow on each link, as formulated in Equations 18–20. The second scenario assumes that the travel times do not change and are thus always equal to the minimum travel time on that link, even if the traffic flow varies (static travel times). Therefore, the travel time constraints are turned off. Another key variable for creating these scenarios is the fleet size which represents the number of ATs available in the system.
A comparison of the routing optimization of ATs between different scenarios was performed and is presented in Table 1. The fleets with 100, 200, 300, 400, and 500 ATs are represented by 5, 10, 15, 20, and 25 ATs in the optimizing process, with the expansion coefficient
Optimization Model Results
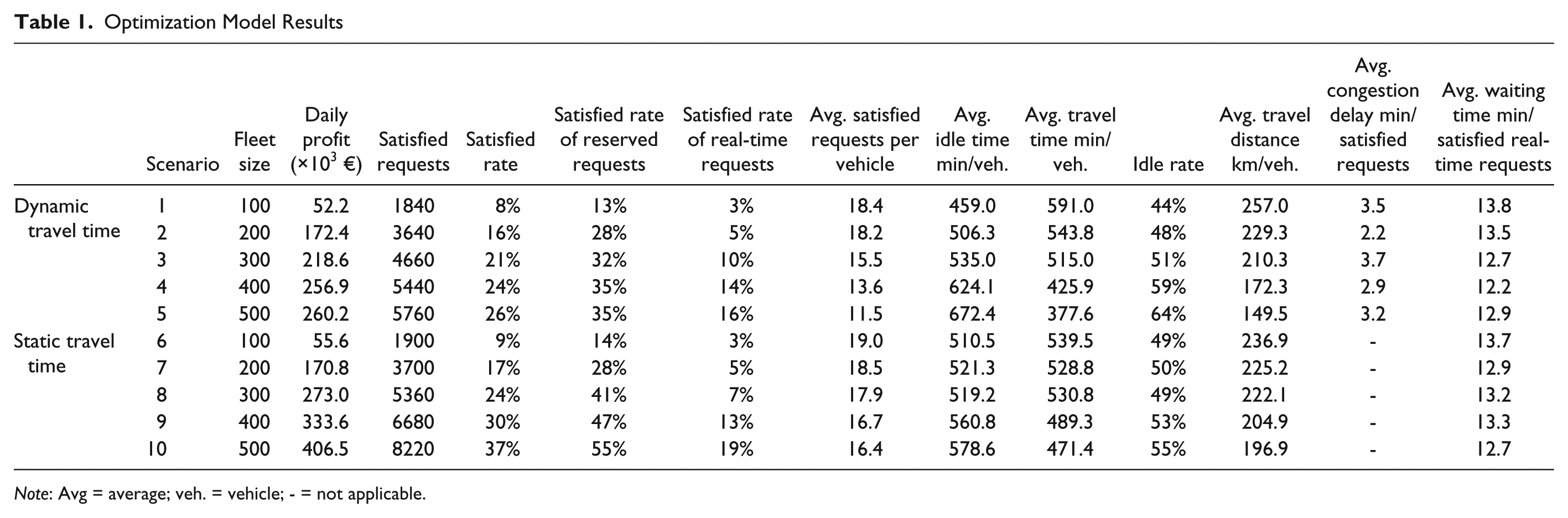
Note: Avg = average; veh. = vehicle; - = not applicable.
In the dynamic travel time scenarios, the fleet size is a critical parameter with respect to the system performance. The daily profit is sensitive to the number of requests satisfied by ATs. When there are only 100 vehicles in the taxi system 1840 requests are satisfied in total. In this case, the satisfied rate is the lowest among all the scenarios. When the fleet size increases to 200, the satisfied demand almost doubled, which also leads to a big increase in the system benefits. This trend continues in scenarios 3, 4 and 5 with 300, 400, and 500 ATs. However, the growth rate is falling in these three scenarios, especially when the fleet size reaches 500. Even though, with more vehicle depreciation cost and less working efficiency, scenario 5 with 500 ATs is the most profitable one among these scenarios with dynamic travel time.
As the penalty of reserved requests is higher than the real-time ones, the system decides to serve reserved requests as a priority. For example, when there are 300 ATs available, 32% of reserved requests are served, while 10% real-time requests are satisfied. As the value of penalty costs has a big influence on deciding which requests are to be served. It also reveals that the system can use this method to adjust the service strategy for different kinds of demand.
The average number of satisfied trips indicates the working efficiency of each AT. In the first five scenarios with dynamic travel time, the most efficient is the one with 100 ATs, with 18.4 requests per vehicle. This also can be seen from the column “average travel time,” “average idle time,” “idle rate,” and “average travel distance.” Scenario 5 has the highest idle time and idle rate. This means more than half of the total operation time ATs are parking somewhere without any movement. The average travel distance is 149.5 km per AT, which is also lower than in any other scenario with the dynamic travel time condition. Actually, it does not conflict with the unsatisfied request rate. The demand is not uniformly distributed during the day which brings out the peak horizons and the off-peak horizons. In the off-peak horizons, 500 ATs are redundant and generate idle time, while in peak horizons there are not enough to serve all the requests.
In the static travel time scenarios, the same trend can be found from scenarios 6 to 10 with regards to the total profitability. Scenario 10 with 500 vehicles has the highest profit, which serves the most requests with a 37% satisfied rate. When the fleet size is 100, each of the ATs are more efficient, serving 19.0 requests in average. The travel distance is also the highest, 236.9 km per vehicle. When the number of ATs decreases, the transport efficiency decreases.
Comparing the static travel time scenarios with dynamic ones, it is easy to find that the ATs system is always more profitable when considering the minimum travel times. When the fleet size is 100, the system obtains 52,200 € under the dynamic travel time condition, which is 6.1% lower than the static travel time with 55,600 €. In addition, the number of satisfied trips in the dynamic travel time scenarios is also less than the one from the static travel time scenarios. The differences in service performance are more obvious in other fleet size scenarios. With 300 ATs, scenario 3 has 19.9% less profit, while with 500 ATs the dynamic travel time scenario has 36.0% less daily profit. This is because when the travel time is always the minimum value, the system would take less time than the dynamic travel time scenario, which makes it possible for the ATs to serve more trips and receive more profit. However, it cannot reflect the real traffic status and the impact of ATs on travel time. This can be seen from the column “Total congestion delay” and the “Avg. congestion delay” in Table 1, which represents the difference between the real travel time and the shortest travel time. These time steps are caused by the traffic congestion and decrease the available service time of ATs.
Conclusion
This paper proposed a mathematical model to study a dynamic travel time based ATs system to provide transport service within the city area. This model involves both the reserved requests and real-time requests by the rolling horizon scheme and optimizes the vehicle routing horizon by horizon. The contribution of this paper is to consider the travel time on each road link according to the number of vehicles travelling on it and perform system optimization with the objective to maximize the total profit of such a system by deciding on each ATs routing selection. It also establishes a rolling horizon scheme to deal with the dynamic vehicle routing problem including real-time information. The model was then applied to a case study in the city of Delft, the Netherlands with a 17.5 hours service period and 23,340 travel requests generating from the road network with 46 nodes and 66 links. From that application it was possible to draw the following conclusions.
The fleet size is an important factor on system profitability, regardless of the dynamic or static travel time. The reason is that more ATs are able to serve more requests which bring more income for the ATs system, even though the depreciation costs are also increasing and the service efficiency is decreasing.
Knowing that real-life travel conditions have dynamic travel time, application of a static minimum travel time vehicle routing model will overestimate the system profitability. Traffic congestion happens when vehicles are travelling on the network, and it leads to less profit, arrival delay and fewer satisfied requests than in the case of the static travel time. However, it reflects the real traffic situation and makes the routing results more realistic.
The influence of considering travel time as dynamic in ATs vehicle routing problems can be seen from two aspects: the time delay on the congested road links and the extra travel distance caused by detouring.
Footnotes
Acknowledgements
The authors would like to thank FICO (Xpress supplier) for establishing a research agreement with the Department of Transport & Planning at TU Delft. This work was supported by ProRail, the train infrastructure manager of the Netherlands. Thanks go also to the Chinese Scholarship Council for sponsoring the first author.
The Standing Committee on Emerging and Innovative Public Transport and Technologies (AP020) peer-reviewed this paper (18-01038).