
Abstract
A common strategy in controlling a permanent magnet synchronous generator (PMSG) driven by a wind turbine is the maximization of output power of the wind turbine itself. A control strategy must be adopted, is to deliver a desired reduced amount of power whenever it is required. In order to realize the direct control of wind turbine output power across a wide range of wind speeds, a linearized parameter varying dynamic model of the nonlinear wind turbine system including wind disturbances is developed and used in this paper. The stability of the wind turbine system is analyzed and a blade pitch controller is designed, based on the linearized, parameter-varying, model-predictive control and is validated. Thus, the wind turbine is regulated in a way that the generator delivers the demanded power output to the load. Moreover, the blade pitch control system also performs the key function of augmenting the stability of the wind turbine, for the right choice of the gains.
Introduction
The conventional method of power generation from a wind turbine has been based on the use of a doubly fed induction generator. However, there has been a growing interest in the development of small scale wind turbine power generating units which typically drive a permanent magnet synchronous generator (PMSG). There have been many recent studies related to the dynamic model and control of wind turbines driving a PMSG. Elbeji et al. (2014) have investigated the dynamic model and control of a PMSG driven by a wind turbine. They have investigated several suitable control schemes. Melício et al. (2011) have considered the application of both classical and fractional order control theory to wind turbines driving a PMSG. Hussein et al. (2013) have considered the application simple control schemes to control both the generator side and grid side of the PMSG system. There have been several applications related to the maximum power point tracking (MPPT) control. Rolan et al. (2009) reported the implementation of a MPPT system by simple speed adjustment of the wind turbine. Aliprantis et al. (2000) discussed the modeling and active control of a stall-regulated variable-speed wind turbine driving a PMSG. Camara et al. (2015) developed a MPPT system for PMSG speed control as well as active / reactive power control, management of the DC-bus voltage and battery’s power control. Tafticht et al. (2006) have discussed the estimation of power quality, control strategies for MPPT and the connection of the wind turbine to a variety of storage or grid systems. Hamatwi et al. (2017) have implemented rotor speed control for MPPT using phase lag compensation. Other important studies related to wind turbines driving a PMSG include the control of the inertial frequency response using a full-rated Voltage Source Converters (VSC), by Cheah-Mane et al. (2014) and the development of a systematic approach to model reduction by Hackl et al.(2018). The important issue of the coupled stability and control of the permanent magnet synchronous generator (PMSG) when driven by a wind turbine was considered by Hamied and Amary (2016). Thus it appears that most of the focus of the current research has been on the control of the electrical side of PMSG driven by a wind turbine and that there are, as yet, a few important unexplored issues. Finally, Zhou and Liu (2018) have presented a active blade pitch control approach for a wind turbine based on a nonlinear PI/PD method.
In this paper, a linearized parameter varying dynamic modeling of the nonlinear wind turbine system including wind disturbances is developed. The stability of the wind turbine system is first considered and a blade pitch control system is designed, based on the linearized, parameter-varying model. The basis of the controller is model predictive control which is then validated. Thus the wind turbine is regulated in a way that the generator delivers the desired power to the load. Operation at the maximum power point is also shown to be feasible. Moreover the blade pitch control system also performs the key function of augmenting the stability of the wind turbine system.
Dynamic modeling of the PMSG and the wind turbine
The dynamics of the PMSG is modeled in the well-known d-q co-ordinates (see e.g. Vepa (2013)). The currents in the d-q axes satisfy the differential equations given by,

The electro-magnetic torque generated is given by

Furthermore the electrical frequency is related to the mechanical speed by the relation

The power output of the wind turbine can be modeled in terms of the power coefficient

where,

In (5), the turbine hub atmospheric air density is

where

The maximum pitch angle
A generic expression for the power coefficient


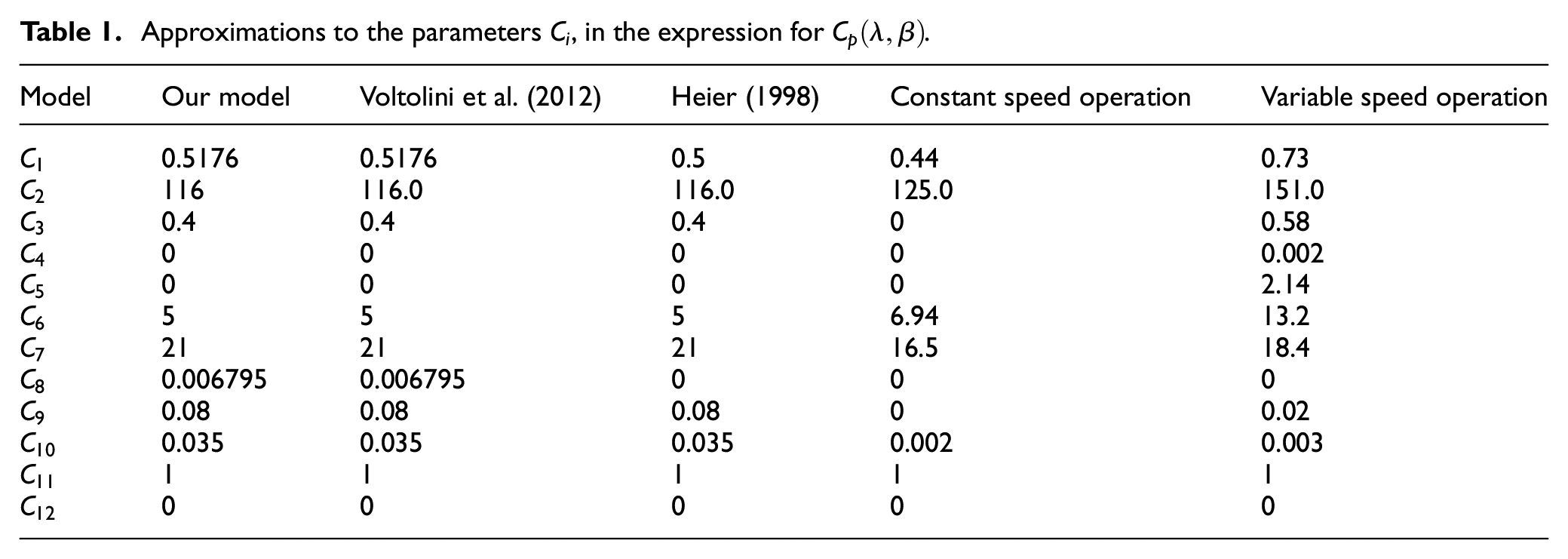
Table 1 lists the approximations to constant parameters
Approximations to the parameters
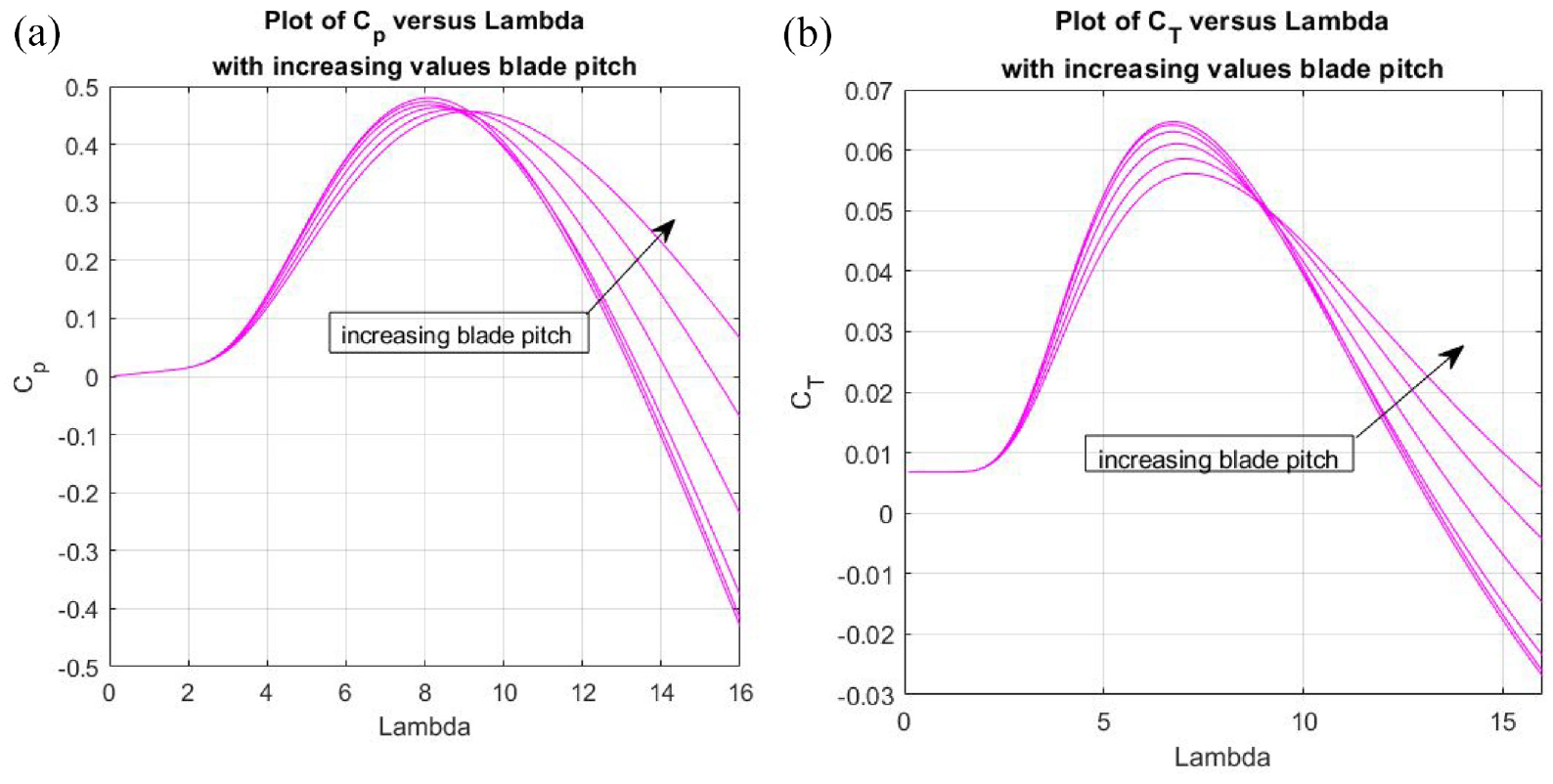
(a) Plots of the power coefficient
From Figure 1, it is seen that initially, as the rotor the speed of the wind turbine is lowered, the tip speed ratio increases, resulting in an increase in the power coefficient as can be observed from the power coefficient curves. The power coefficient curve is only valid above the cut-in tip speed ratio and below the cut-out tip speed ratio. However as the tip speed ratio increases beyond the point of maximum power, the aerodynamic conditions limit, and reduce the power absorbed by the wind turbine from the flow. Consequently there is fall in the power output and the power coefficient also falls. It must also be mentioned that when the flow around a blade section separates, the lift generated by it stalls and the dynamic stall conditions severely limit the power output of the wind turbine. In these situations the power coefficient models of the type given by equation (8) are no longer valid and the effects of dynamic stall must be included in the model as mentioned by Holierhoek (2013). When dynamic stall is present, the power coefficient is further influenced by the stalled flow and the dynamic inflow that may be present, the tip (and root) corrections due to having a finite number of blades, the presence of yawed inflow, the effects of the shadow of the tower as well as three-dimension effects on the lift generated and the state of the turbulent wake. In this case the dynamics of lift generation must be included as is done with models developed for helicopters (see e.g. Truong (2017)) and aircraft propellers, using a blade-element momentum approach as indicated in Vepa (2013). The analysis of the stability and control of the wind turbine, under these conditions is well beyond the scope of this paper and will be presented elsewhere. Moreover the power output of the wind turbine is generally very low under these conditions and the dynamic model of the power generated is used only for developing control laws for active control of a stall-regulated variable-speed wind turbine.
The dynamics of the blade pitch angle actuator, which essentially determines the blade pitch angle

where
Having defined the dynamic models of the generator and the wind turbine and also discussed the limitations of the models for the power coefficient, it is important to briefly discuss the distribution of wind on the Earth’s surface. At any location on the Earth’s surface, the wind velocity is distributed probabilistically. The Weibull distribution best describes the probability distribution of the wind. Since the wind power is proportional to the third power of the wind speed, as a consequence of the fact that the wind is a random variable, the actual mean wind power at a particular location can be expressed in terms of the parameters of the Weibull distribution and is given by.

where
Finally one may specify the desired power output as:
For

For


For

For
De-coupling the electrical and mechanical subsystems
To simplify the design of the controller for the wind turbine it is useful to decouple the electrical and mechanical subsystems. Thus to decouple the electrical and mechanical sub-systems, re-consider the electrical sub-system dynamics given by (1),

With electrical feedback,

one has,

The electro-magnetic torque generated is given by

Thus the electrical and mechanical subsystems are coupled and the controllers can be independently synthesized. Moreover the stability can be independently assessed.
The state space model
The dynamics of the PMSG driven by the wind turbine may now be expressed in state space domain. Define the state vector,


On the other hand, based on the eCoupled model,


The mechanical dynamics in terms of the states is,




Linearized dynamics of the wind turbine
The complete dynamics may now be linearized and the conditions for equilibrium and stability may be established. The derivative of the mechanical torque driving the PMSG is,

Thus, linearizing the expression for

In terms of the states of the system,

where

with,

Thus, the derivative of the power coefficient

where,


The nominal dynamic pressure force on the wind turbine disk is denoted as,

The linearized driving torque is expressed as,

where the stability derivatives


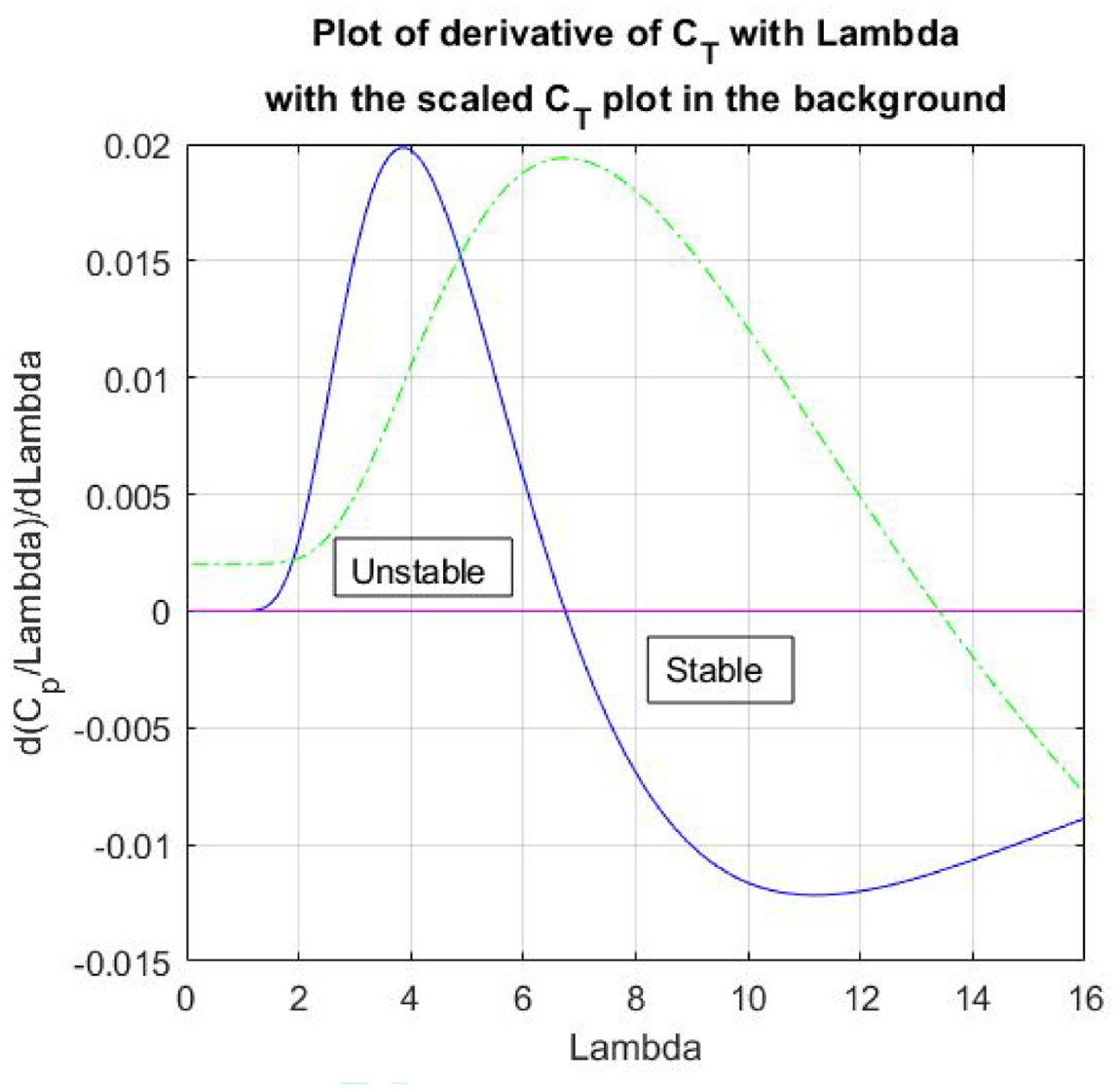
Plots of the derivatives of the power coefficient
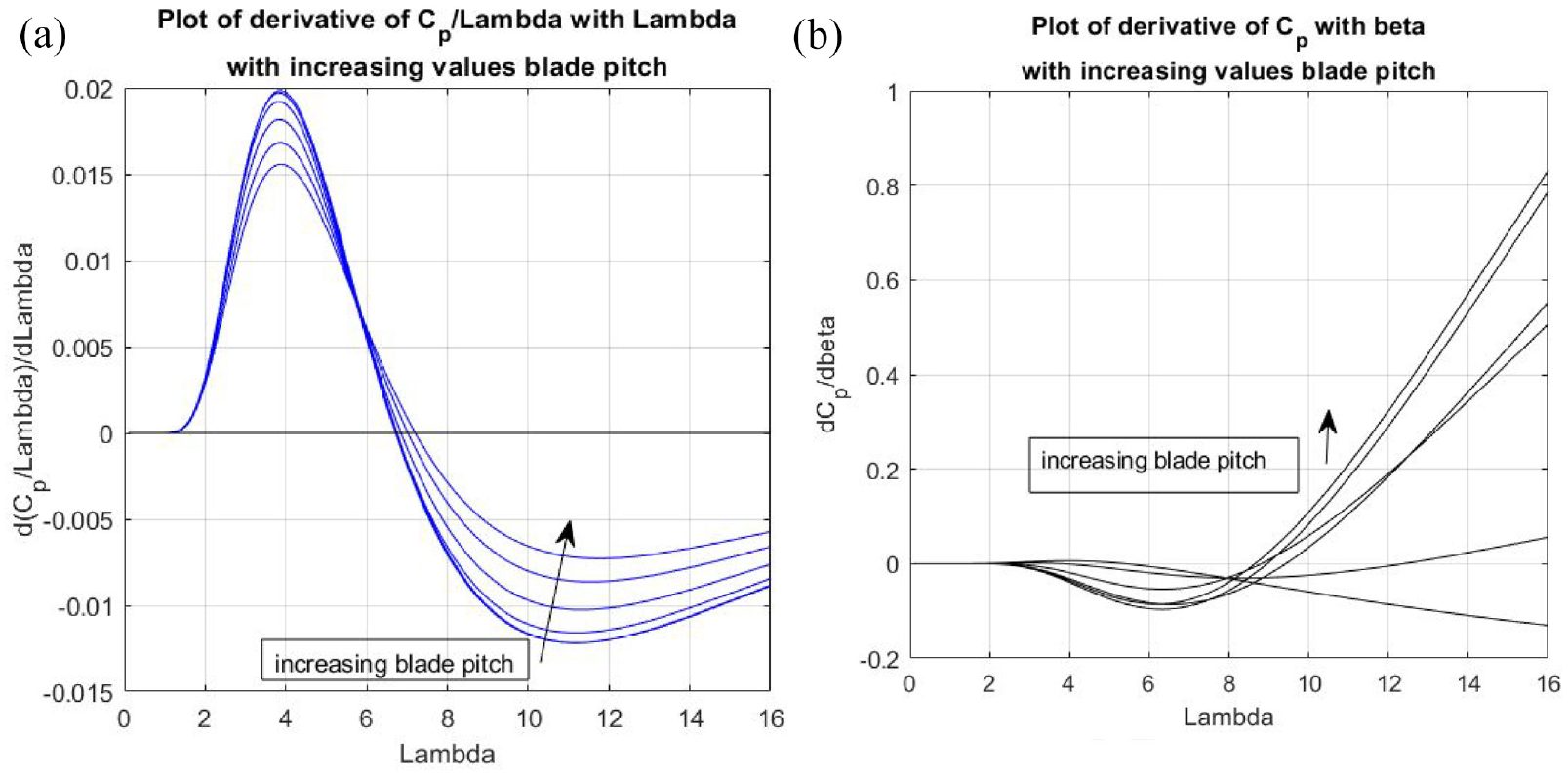
(a) Stability derivative of the power coefficient and (b) Stability derivative of the torque coefficient.
It is clear from the Figures 1 and 2 that wind turbine’s power coefficient is effectively fully controllable only beyond

Equation (38) is expressed as,

where the stability derivatives


Thus the complete linear model is given by,

or in decoupled form, with the electrical feedback,

where,

The electromagnetic torque is,




The mechanical dynamics is,

Thus, eliminating

and

Equilibrium and stability of the wind turbine
The steady state conditions for equilibrium point operation are used to define the steady state rotor mechanical speed
Thus, the steady state rotor mechanical speed

Hence, it follows that,

It also follows that, the steady state

To consider the stability, since the electrical system is decoupled and stable it is only essential to consider the mechanical subsystem. Thus,


Hence the open loop stability is guaranteed when,


Since the expression on the right hand side of the preceding equation is generally small as

Referring to Figure 3, the actual point of operation is determined by the equilibrium point which lies on the
Stability diagram.
To analyze the closed loop stability, assume a full state control law of the form,

The last equation is,

The characteristic polynomial is,

It reduces to,

The characteristic polynomial expands to,

Thus, in principle,


The second condition (66) may be expressed as,

provided,

In particular when

Thus the closed loop stability is guaranteed by a proper choice of
Control law synthesis: Nonlinear model predictive control
In this section we shall briefly consider the synthesis of a control law for the nonlinear plant by locally linearizing the plant dynamics and then applying the methodology of model predictive control at each time step. The concept of MPC is explained by Rawlings (2000). The methodology considered is based on the implementation due to Vepa (2018), but altered to suit the current application. To illustrate the process of synthesis of a linear control law at each time step, a typical discrete time system is defined as,

An control input sequence is defined as

The objective is to minimize a performance index which is function of the output sequence

In (72)

It may be noted that the state vector

where the block diagonal matrix

where,

It has been assumed for simplicity that

with,

To obtain the optimal control sequence one may set the gradient of the cost function with respect to the sequence of control inputs,

Considering only the receding horizon, the optimal control input sequence is given by,

It is recursively obtained over successive prediction windows of the control sequence. The product

The parameter

where
It must be emphasized that the MPC based control ensures the closed loop stability of the wind turbine as it is based on the theory of linear optimal control. Thus it is important to focus on the steady state operating point.
Determining the optimum operating set point
To establish the steady state operating point, it is important to recognize the desired output power is our primary requirement. Thus based on the demanded power and the current operating speed, the desired steady state operating point is determined. The desired power coefficient is then determined from the demanded power output and the nominal or current operating speed. Once desired power coefficient is known, for the given tip speed ratio
It must be recognized that although the commanded pitch angle is,
It must be said that the MPPT algorithm may also be implemented. It is exactly same algorithm implemented by Vepa (2011). Briefly the current drawn from the generator is increased slowly till the maximum power point is reached, so the wind turbine is operating just beyond the maximum of the
Finally the case of active stall control is not considered as in this case the relation for the power coefficient given by (8) is no longer valid. This case will be considered independent using a set of complementary controller synthesis tools and reported separately.
Typical simulations and results
A typical three bladed wind turbine is simulated and controlled as application of the above theory. The system parameter are listed in Table 2. The nominal time step for integrating the equations of motion is
Typical parameter values for simulation.
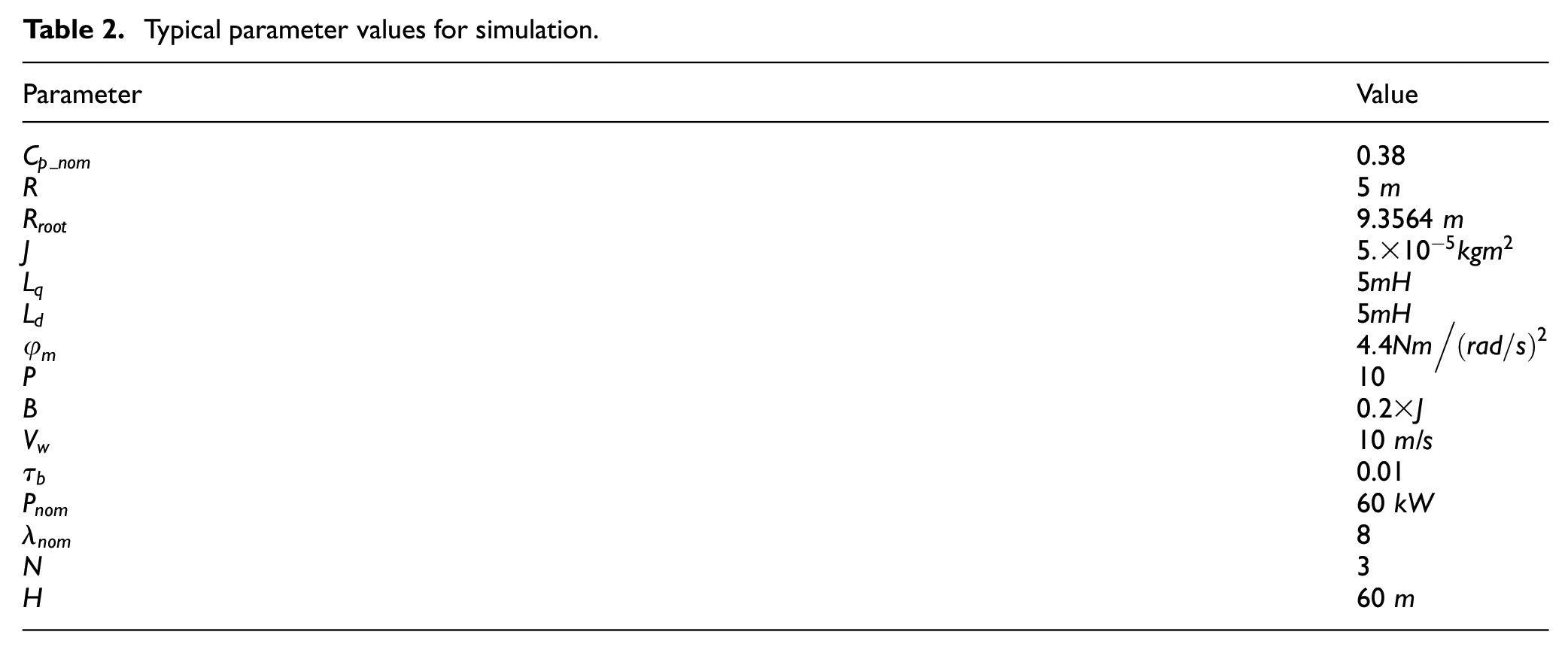
Initially the wind turbine is operating in steady state with
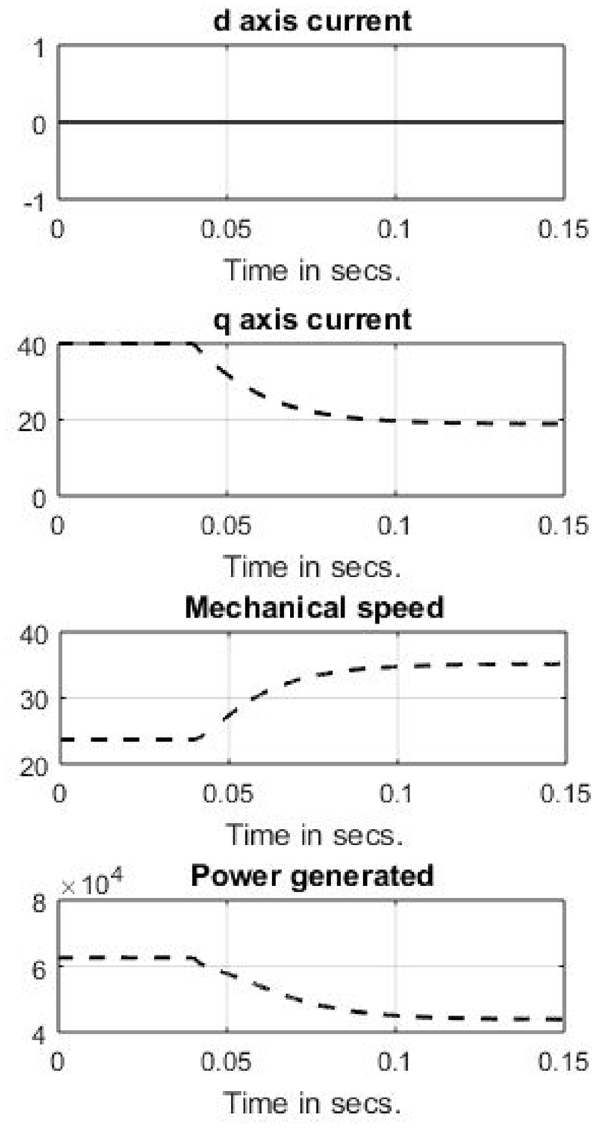
Current, mechanical speed, and power output response of the wind turbine in response to power reduction command.
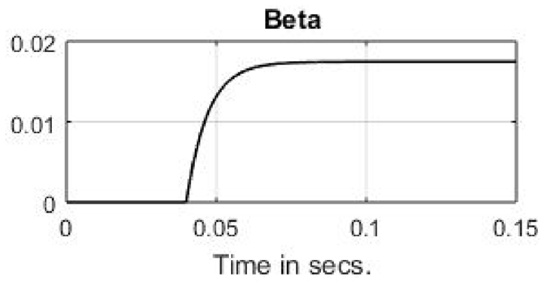
Response of the blade collective pitch angle during the reduction in power.
The steady state pitch angle is observed to be just over 1° while the commanded pitch angle (not shown on the Figure 5) was about 3.4°. Thus although the control system does not track the commanded pitch angle it does respond to the power demanded set point and delivers the demanded power in the steady state.
Discussion and conclusions
In this paper, de-coupled dynamic and equilibrium models of a PMSG driven by a variable speed wind turbine were presented and used in the analysis of the stability and the synthesis of a power output controller. A key feature of the paper is the systematic approach the problem was approached to guarantee both the mechanical stability and independent control of the mechanical dynamics of the wind turbine.
A representative
The generator is modeled in the synchronous rotating d-q reference frame and de-coupled from the turbine by feedback. Based on de-coupled dynamic model, parameter bounds for the stability of the wind turbine are derived. The stabilization and the active blade pitch control of the wind turbine with the PMSG for power output regulation has been validated and has been successfully demonstrated. The issue of the instability of the wind turbine has been addressed by a linear feedback control law that stabilizes the system and also delivers the desired power output. The control law, which is designed by applying the MPC procedure, and which has the structure of a proportional-derivative stabilizing control law that ensures the demanded power output is delivered, has been validated. Moreover the power delivered is tracked by consideration of the equilibrium conditions, using a generic non-dimensional mathematical model for the power-speed characteristics. For this reason the controller can be applied to any wind turbine driving a PMSG, even when a turbine-specific matched mathematical model is not available.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.