
Abstract
Background:
During functional wheelchair movement there are several types of stroke pattern that a manual wheelchair user (MWCU) can utilize in order to propel.
Objectives:
To examine the biomechanical differences between disabled (WCU) and able-bodied (NWCU) children whilst taking part in functional activities at the Cheetahs Wheelchair Sports Club.
Study Design:
A multiple measures cohort study.
Methods:
Eleven participants were divided into two groups; WCU (n = 7) and NWCU (n = 4). All subjects were asked to perform three functional tasks; 30-second agility test, 1-minute distance test and a 10-metre sprint test. Upper body kinematics were recoded using a XSens MVN BIOMECH motion capture suit.
Results:
NWCU outperformed the WCU in all of the tasks, however, no significant differences between the group’s results were found. Nevertheless, significant differences were found in the maximum shoulder flexion angle for both right and left with NWCU utilizing more flexion and near significant differences in the NWCU overall shoulder range for right and left.
Conclusions:
In order to increase function in young MWCU then more specific-based sessions should be implemented targeting the exploitation of large shoulder ranges during propulsion, consequently resulting in more efficient movement.
Clinical relevance
Employing a propulsion technique which uses larger ranges of shoulder motion and decreased pushrim frequency results in an optimal cost-effect balance without predisposing MWCU to overuse injuries.
Background
The International Classification of Functioning, Disability and Health (ICF) provides a scientific framework for describing, studying and understanding health and health-related states which subsequently have implications on participation in disabled sport. 1 In a school environment, for example, a disabled child may be unable to contribute in physical education classes due to the barriers that exist between themselves and the able-bodied children, therefore limiting their participation. This lack of contribution is due to the disabled child’s dependence on their wheelchair for their activities of daily living, consequently only allowing them to take part in activities which are adapted so they can engage. This study focused on the biomechanical differences between disabled and able-bodied children while taking part in sport at the Cheetahs Wheelchair Sports Club. The club’s main objective is to create a ‘level playing field’ for disabled children with regards to sport by allowing able-bodied children to take part in disabled sporting activities with the disabled children. Both groups use the same make and model of wheelchair which establishes equality. Environmentally, this sports club removes the barriers which previously would not allow disabled children to fully take part in sport. As a result, the club provides sporting activities which both able-bodied and disabled children can take part in and enjoy as = therefore, increasing the participation opportunities for disabled children and promoting improvements in health and wellbeing.
The majority of research available regarding the kinetics and kinematics of wheelchair sport focuses solely on wheelchair propulsion.2-16 Although propulsion is very important, this does not provide a functional picture in terms of sporting movements as it does not account for any functional actions which involve turning and changing direction which are key motions required in disabled sport.
Disabled wheelchair users (WCU) are much more efficient at producing competent functional movements compared to able bodied wheelchair users (NWCU) due to the possession of established neural pathways, which are responsible for effective movement.17,18 Practice of the movement patterns, which a disabled subject executes on a daily basis, aid in making the motions more refined. 17 Along with neural pathways there are also several other factors that increase propulsion efficiency which include; physiological adaptations, such as an increase in muscular power and endurance, correct muscle activation patterning, appropriate central nervous system signalling and the excitability of motor neurons. 19
NWCU often display uneconomical movements that result in high stresses on joint structures of the upper-body and injuries are often as a result of repetitive loading of an abnormal movement pattern, for example, excessive internal rotation at the shoulder or excessive wrist extension in relation to the pushrim.3,5,11,20,21 Common injuries include carpal tunnel syndrome, secondary shoulder impingement and overuse pathologies associated with the rotator cuff. The rotator cuff muscles are not only exertive during propulsion but they are also active stabilizers for the glenohumeral joint, meaning they fatigue more readily.11,12,22-24 The elbow is the joint which is least commonly injured due to the combination of congruent bony architecture and the strong musculature that cross the joint, both of which contribute to a solid stabilization.3,13
Rodgers et al. 13 found that NWCU produce compensatory movements when propelling themselves, often trunk flexion. They investigated the effect that trunk flexion in particular had on the biomechanics of MWCU and established that NWCU counteract peripheral fatigue by generating power from their trunk and therefore they use this body part through a greater range. 9 This exacerbates upper-limb injury as trunk flexion results in protraction of the sternoclavicular joint which can decrease the subacromial space. When this is coupled with repetitive shoulder flexion and extension in a slightly abducted position it can heighten the risk of developing pathologies such as secondary shoulder impingement. 25
In functional wheelchair movement there are also several types of stroke pattern that a MWCU can utilize to propel including pumping propulsion, semi-circular (SC) propulsion, single loop (SL) propulsion and double loop (DL) propulsion.8,15,26 The literature available regarding the most efficient stroke pattern is not unanimous and several authors’ state that this is because a MWCU main aim is to implement the stroke which produces their optimal cost-effect balance, regardless of propulsion experience.3,4,9,12 Contrary to this, Shimada et al., 15 however, stated that after biomechanical analysis on seven experienced MWCU, that the SC stroke pattern was the most efficient, whereas, de Groot et al. 26 declared that the DL propulsion pattern was more effective for experienced MWCU. de Groot et al. 27 on the other hand concluded that for NWCU the pump stroke pattern was the most economical. This however, is the stroke that possesses the largest push frequency meaning that it is of high metabolic cost as the MWCU does not use their limb through a large range.9, 25, 27 The small range that the NWCU utilize to implement this stroke predisposes them to upper-limb injuries such as the ones previously described as it has to be repetitive in nature to produce their optimal cost-effect balance which increases the stresses on upper-body joint structures.8,27 After seven weeks of low intensity wheelchair practice, however, de Groot et al. 27 found that NWCU gradually adopt a more effective, circular style of propulsive stroke pattern (SC, SL or DL) and in turn increase their efficiency and reduce their risk of developing overuse upper-limb injuries.
In 2008, de Groot 28 studied the effect that wheelchair propulsion practice had on technique and efficiency which involved three weeks of low intensity practice, again revealing an increase in mechanical efficiency. This was a result of a decrease in stroke frequency which is prevalent when implementing a circular stroke pattern 9 and is in agreement with research conducted by Robertson et al. 16 who illustrated that along with a decrease in stroke frequency experienced MWCU push for a longer duration, produce forces with lower peaks and take longer to reach their peak values without displaying any decreases in speed. They achieve this by applying this low peak force over a longer period which minimizes exposure of the joints to harmful forces, as the main contributor to reaction forces in the upper-limb are large propelling forces at the hand.14,20 As the peak forces are lower in experienced MWCU these reaction forces are therefore not as high contributing to a decrease in upper-limb injury.
de Groot et al. 28 also found that NWCU are less stable ‘coasters’ meaning that they are required to generate more corrective movements when compared to experienced MWCU which decreases their efficiency, as they are less directed towards propelling themselves at a high speed but are more focused on maintaining a straight path. Other findings from this study revealed that experienced and inexperienced MWCU differ in terms of their muscle sequencing. NWCU do not control the muscles responsible for propulsion and recovery (Supraspinatus, Infraspinatus, Deltoid, Pectoralis Major, Serratus Anterior and Long head of Biceps 10 ) individually as they do not possess the correct neural pathways to do so. On the other hand, experienced MWCU have the ability to do this and are also able to recruit the involved muscles in the correct sequence. This results in low limb stiffness, decreased co-activity of muscles and also an increase in degrees of freedom consequently producing more efficient movement. 28 In addition to this, MacMaster et al. 29 further reiterates the importance of synchronized muscle sequencing in experienced MWCU during functional movement by stating that muscles surrounding the shoulder complex need to: generate adequate forces to prevent the humeral head and the acromion process colliding during propulsion and also reduce compressive and shear forces occurring between upper-limb joint structures 9 . If the improper muscle patterning is not addressed either upper-limb overuse injuries will occur due to muscular imbalances or propulsion energy will be absorbed. 3
The aim of this study is to investigate if there are any biomechanical differences between WCU and NWCU when taking part in functional tests.
Methods
Study Design
This study used a multiple measures cohort design to compare healthy individuals to impaired individuals.
Participants
Prior to data collection, the study was approved by the institutional ethics committee. Written consent to the testing prior to the experimental day was gained from the children and a parent/guardian/carer.
Eleven subjects, two males and nine females, with an average age 9.2 years (5–15years) and an average height of 1.3 m (1.2 m–1.5 m) were recruited, seven in the WCU group and four in the NWCU. A set of standard questions including ‘Would you use your wheelchair to participate in sport?’ were asked to determine which category each of the subjects were placed into. Other questions were asked such as ‘How long have you attended the Cheetahs?’, ‘What is your disability?’ and ‘How often on a daily basis would you use your wheelchair?’
Equipment
The XSens MVN BIOMECH movement tracking suit (Enschede, The Netherlands) was utilized during testing (Figure 1). This ensured accurate movement tracking via numerous camera-less inertial sensors. These movements were analysed via the biomechanical software; Visual 3D (C-motion, Inc., Germantown, MD, USA). The wheelchairs the subjects used were ‘Spin Off’ Motivation wheelchairs (Motivation UKSports Team, Brockley Academy, Brockley Lane, Backwell, Bristol, UK, BS48 4AQ) which allowed agile movements and were designed for use in disabled sport.

MVN BIOMECH Movement Tracking Suit.
Statistical Analysis
Statistical analysis was performed by the Statistical Package for the Social Sciences programme (SPSS Version 19). A preliminary analysis was conducted using a mixed methods model with post hoc pairwise comparisons to explore the differences between the subject groups and tasks.
Protocol
The lack of functional testing in analysis of wheelchair movement was recognized by Stanley et al. 30 who demanded the need for an appropriate outcome measure regarding fitness for MWCU. In 2010, Tanaka and colleagues 31 created a battery of functional field tests that they believed could be used as the general protocol to determine physical fitness in adult paraplegics in the future. A number of these tests were modified for a paediatric population and utilized in the present study.
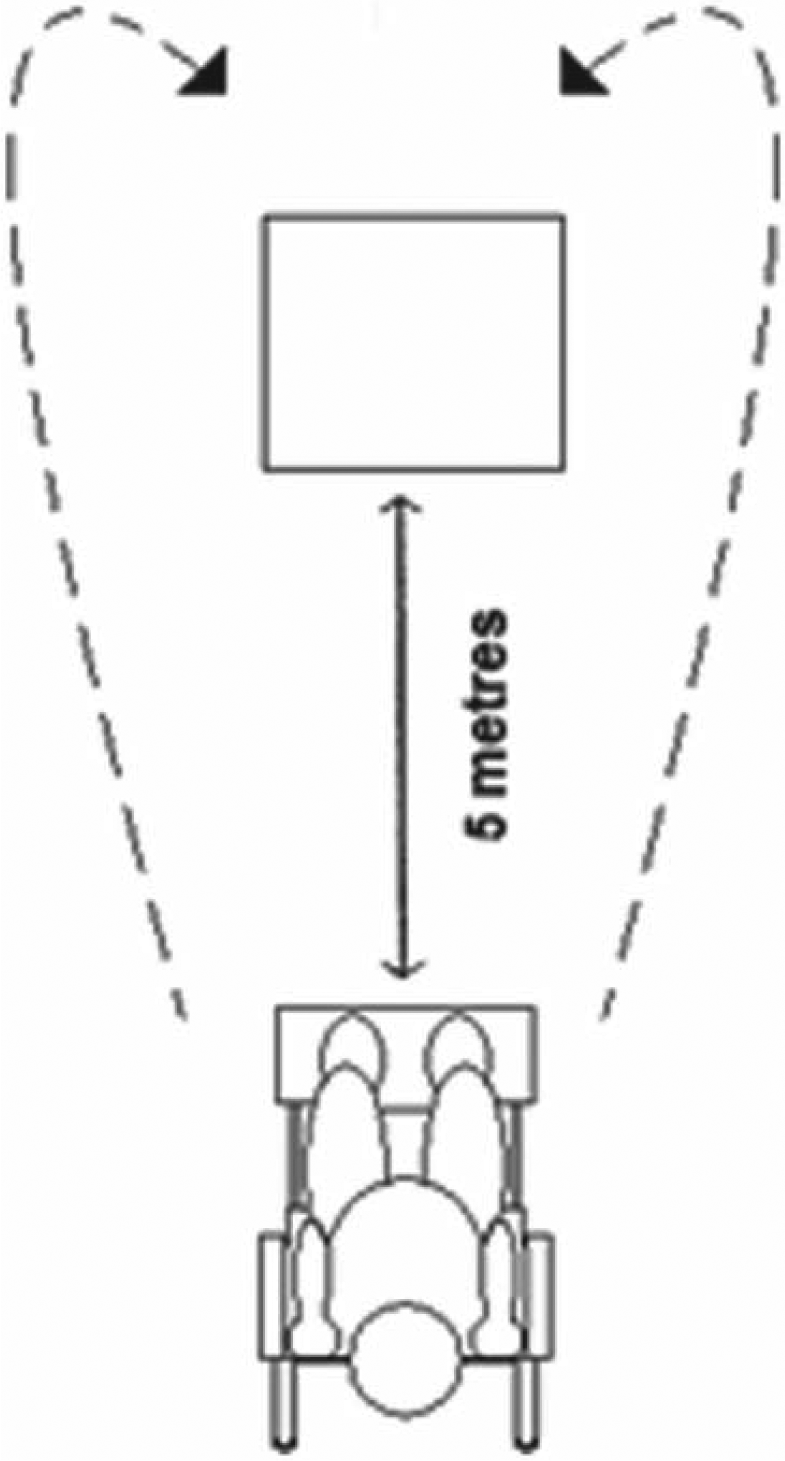
A warm-up was provided to the children by the Cheetahs coach prior to the testing. The upper-body piece of the XSens MVN BIOMECH motion capture suit was then fitted to the subject. Following this, it was calibrated in accordance with the XSens guidelines and anthropemetric measurements were taken. A static capture of the subject was then recorded while stood, seated and while seated in their wheelchair which provided an anatomical overview of both standing and sitting postures. The subject then performed a directional preference test (Figure 2) which aimed to establish if the subject had a favourable direction when completing a 180º turn. This was classed as a dominancy test and consisted of asking the subject to manoeuvre themselves around a table which was placed 5 metres away. The subject had to be able to sit at the table at the opposing side to which they approached. If the subject used their left hand as their braking hand and right hand to propel, they were categorized as having an anti-clockwise directional preference. The subject then took part in three functional tests after they were explained and demonstrated. These were:
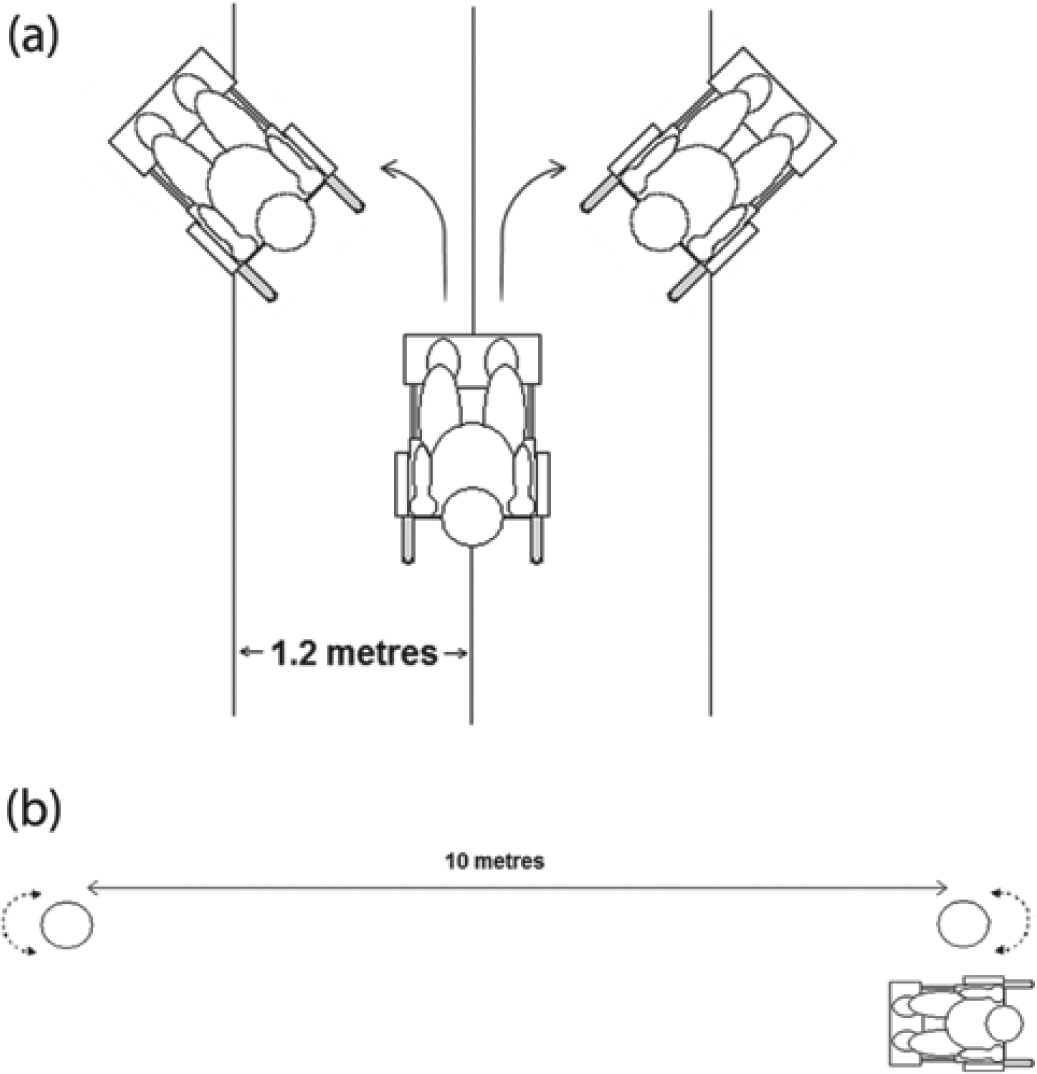
Agility repeat turn test: This was compromised of three markers being placed on the floor parallel to each other at 1.2-metre intervals (Figure 3a). The subject started at the central mark and was asked to propel themselves forwards, as quickly as possible, so both of their wheels were beyond one of the side markers. Once they had completed this, they propelled themselves backwards returning to the start position on the middle marker where they repeated the manouevre in the opposite direction. The number of times the wheelchair returned to the middle marker was recorded over a 30 second period with Takizawa et al. 32 stating that this is a reliable tool for predicting agility.
Sprint test: This involved the subject manuerving themselves as quickly as possible from one marker to another, positioned 10 metres apart. This test produced indications of muscular power, however it was adapted from the original adult research which utilized a 20 metre track. 33
One-minute distance test: The final test involved the researchers recording the distance that the subject covered in a one-minute period, which entailed completing a set track that was comprised of two markers 10 metres apart (Figure 3b). Again, this was adapted from Tanaka et al.’s research on adult subjects who had to travel for three minutes. Once the child had reached each marker they manouevered themselves around the marker with the use of a 180° turn then propelled themselves to the previous marker. This procedure was repeated until the time limit had been reached and was intended to assess muscular endurance. 33 Within this test, directional preference was important and may have modified the outcome of the test. The subjects were specifically asked to perform this test so they were completing the track in the opposite direction to their preference. By doing this, differences between the WCU and NWCU would be highlighted more readily, as an WCU should have smaller preferences between their dominant and non-dominant sides suggesting that they may travel further when performing this test.
Directional preference test.
Results
Eleven subjects were tested (WCU = 7, NWCU = 4) all of which were included in the analysis of the outcome measures. Due to technical issues, however, only eight subjects were utilized for biomechanical analysis (WCU = 4, NWCU = 4).
The NWCU were on average slightly younger than the WCU as the average age for the WCU was 9.4 years and average age for the NWCU was 8.75 years. Average height for the WCU and NWCU was 1.3 m and 1.36 m respectively.
The average length of time that the subjects had been attending the Cheetahs on their testing day was 8.5 months for the WCU and 6.8 months for the NWCU.
The WCU completed on average 4.14 turns in the 30 second time period in the agility test, whereas, the NWCU completed six turns in the same time (P = 0.059). The sprint test showed that the average time taken for the WCU to complete the 10 metres was 11.70 seconds, compared to the NWCU at 7.66 seconds (P = 0.299). The distance test showed the average metres covered by both the WCU (43.33 m) and NWCU (60 m) (P = 0.123) (Table 1).
Outcome measures from functional tests for all subjects.
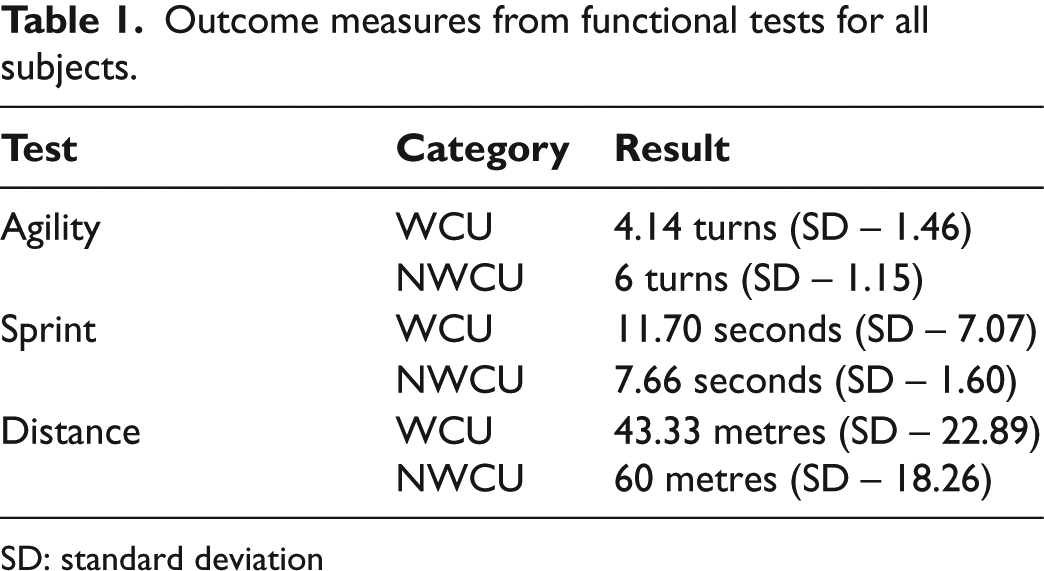
SD: standard deviation
Biomechanical Analysis
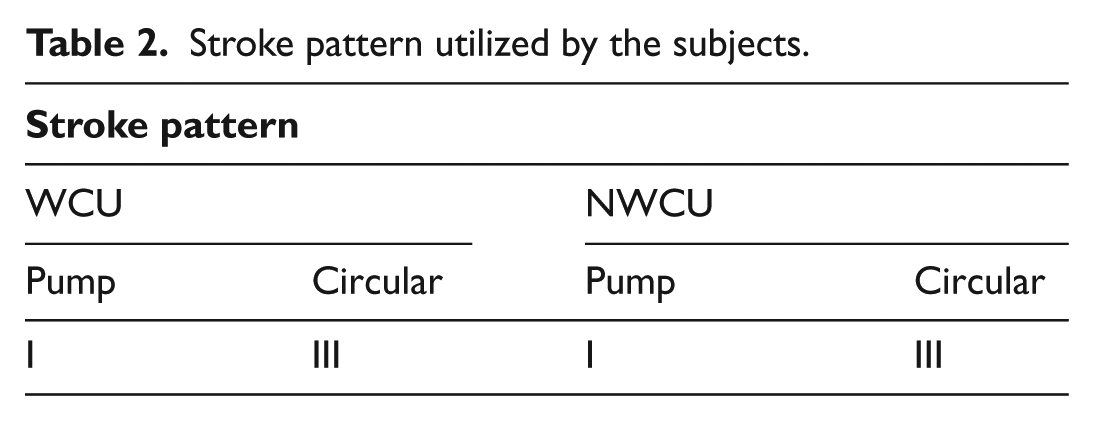
Subjects were grouped accordingly into either a pumping or circular action (Table 2) which was determined by de Groot et al.’s classification 26 (Figure 4). This was executed by tracing the trajectory of upper-limb anatomical landmarks during propulsion on the biomechanical software; Visual 3D.
Stroke pattern utilized by the subjects.

Types of propulsion: pump (1) and circular (2). 26
Discussion
Functional Tests
From the results of the functional tests it can be seen that the NWCU outperformed the WCU on every task despite them being younger on average and also having attended the Cheetahs for a shorter time period, although there was no significant difference between the values (P = 0.686 and P = 0.854). One explanation for this may be decreased upper-limb strength or greater motor control deficits in the WCU. 9 In this population it would be normal to expect to find the older subjects outscoring the younger subjects in functional tests due to their increased musculoskeletal development, however as a proportion of the subjects in the present study possessed a disability this was not the case. Near significant differences were seen when comparisons were made between the results for the agility and distance tests between the two groups (P = 0.059 and P = 0.123) which suggests that the NWCU are more competent at sustaining efficient propulsion in comparison to the WCU.
Propulsion Biomechanics
The current findings support Finley et al.’s 9 assumption that the WCU display more frequent wheel contact of a shorter duration. The NWCU produced significantly larger shoulder ranges of motion in comparison to the WCU (Maximum shoulder flexion angle right P = 0.005 and Maximum shoulder flexion angle left P = 0.0034). This contradicts research by Robertson et al. 16 who, as previously mentioned, stated experienced MWCU have a lesser stroke frequency and push for a longer duration. Although the WCU refine their propulsion technique on a day-to-day basis it is postulated that the reason why the NWCU outscored the WCU on the functional tests is due to the larger range of shoulder movement they utilized during propulsion (Figure 5) (Table 3).
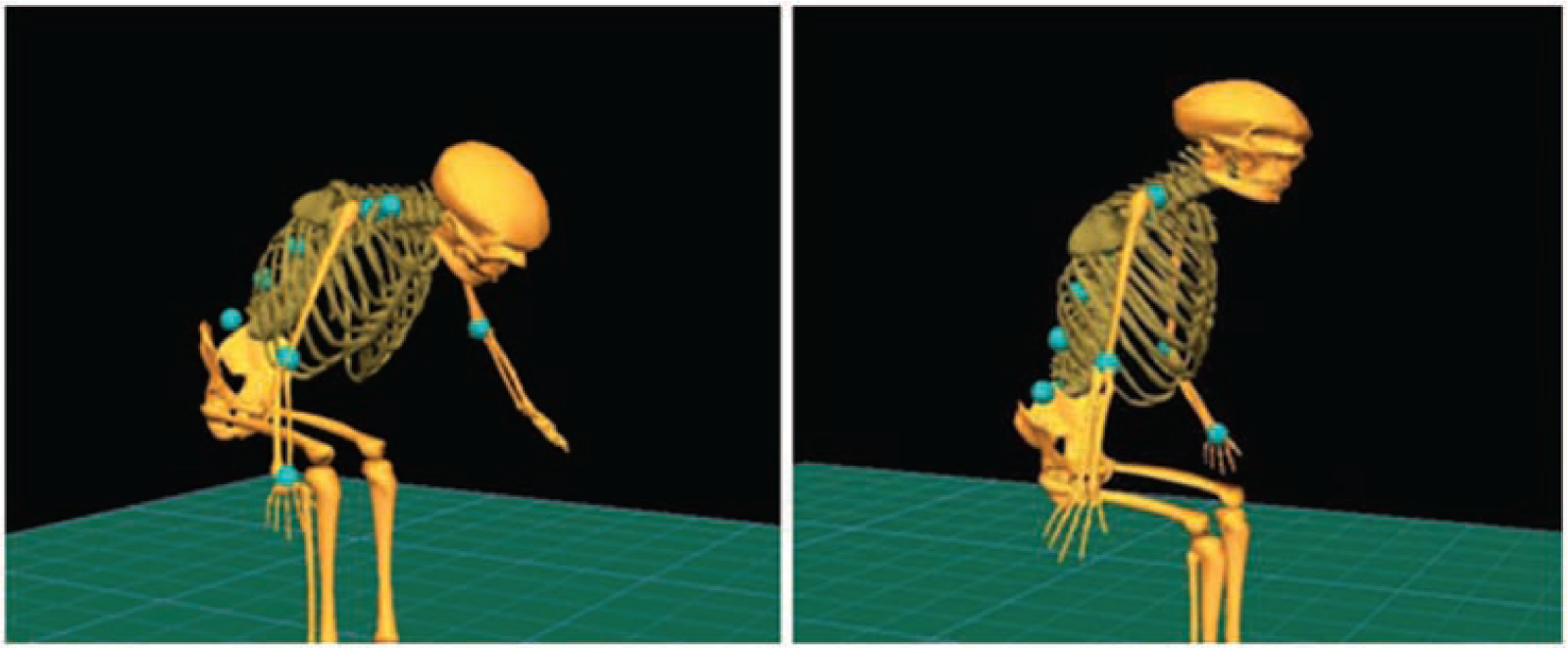
End of a propulsion cycle for an NWCU (left) and a WCU (right).
Average shoulder and elbow joint angles. ROM = range of motion.
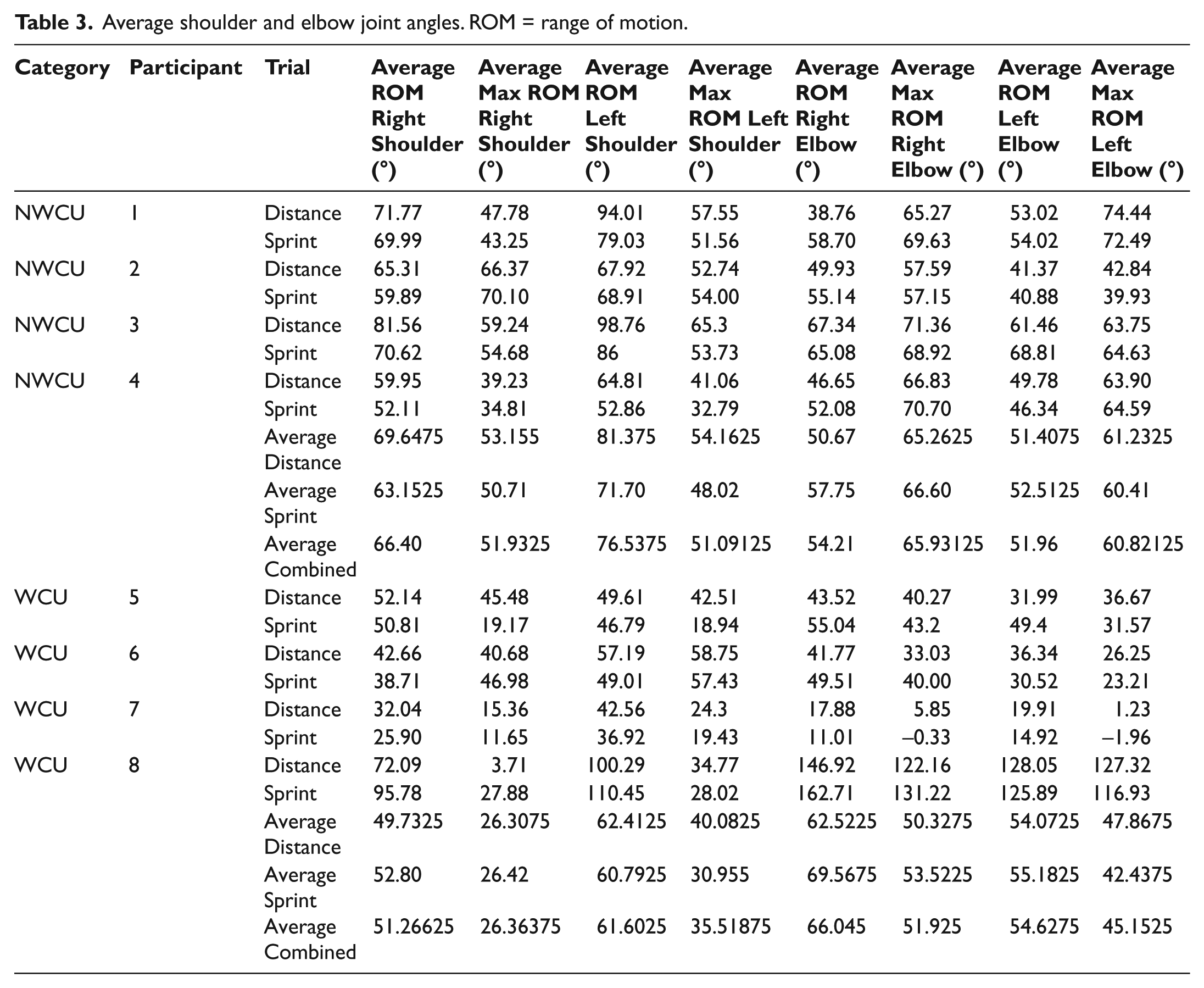
It is interesting to note that the WCU utilized a greater elbow range during propulsion compared to the NWCU suggesting that the shoulder is the joint which is important for efficient wheelchair movement during functional propulsion tasks (Table 3). It is therefore suggested that coaches and therapists who are involved with MWCU focus on prioritizing the shoulder via a shoulder strategy for propulsion rather than an elbow strategy. A shoulder strategy should include maintaining or gaining a large range of motion and promoting strong musculature that can exert powerful contractions throughout the range of motion to aid effective propulsion.
Limitations
The MVN suit was used in this study as it allowed the data to be collected in a real world setting of a disabled sports club rather than in a laboratory. When utilizing the MVN suit with this specific population several challenges were experienced. Some children complained that the suit was uncomfortable and heavy. During testing the suit sometimes became unresponsive due to the high intensity nature of the activities, which led to several subjects having unreliable movement analysis data reducing the sample size.
Recommendations for future research
Future research into this area should look into performing data collection in this setting as it does not involve any of the controls which would be witnessed in a laboratory. Careful use of the suit and its software should be utilized ensuring all calibrations and anthropometric measurements are accurate.
Conclusion
In order to increase function in young MWCU, specific activity-based sessions should be implemented to help the user adopt an effective propulsion technique. These sessions should focus on developing shoulder strategies for propulsion which utilize large shoulder ranges of motion coupled with adequate muscle power and control that can be employed throughout the range of motion.
Footnotes
Funding
This research was funded by UCLan Undergraduate Research Internship Scheme.