
Abstract
Hands-on learning is widely recognized as an essential component of mechatronics education. In this article, we describe an implementation of a student work assignment in an advanced course in mechatronics. The article compares the previous free-form project with the new common-form exercise. The purpose is to renew the form, execution, and grading of the assignment, for better control over the learning outcomes and focusing the workload of the teaching staff without needlessly limiting the students’ own exploration of the topic. The evaluation is based on the teachers’ observations and the students’ feedback. In the assignment, the students will design and build a controllable see-saw mechanism powered by ordinary computer cooling fans. Similar experiments are commonly used for teaching in the form of ready-made plans, kits or complete devices. In our version, we wanted to involve the students in the lower level design to better illustrate the effects of mechanical details on the control system. The updated exercise was well received, the students reported clearer understanding of the synergy between the different disciplines of mechatronics, and the teachers were able to provide more comprehensive assistance on questions. Some challenges were identified, including a lack of analytical research by the students when not specifically prompted to do so. In our opinion this renewed approach is flexible enough to accommodate students from various backgrounds and helps the teachers to better adjust the supplied materials according to their students’ particular needs.
Introduction
Mechatronics has many different definitions depending on the emphasis taken to the subject. Most common definitions share the idea that mechatronics can be seen as a synergistic combination of its core disciplines in order to create new technological solutions.1–4 These core disciplines are mechanical engineering, electrical engineering, control engineering and computer science.5–7 One needs to have sufficient knowledge in these fields in order to understand the synergy and interrelations between these different domains,8,9 thus making the teaching of mechatronics demanding. 10 Another challenge in teaching mechatronics is the balance of coverage between each discipline. 8 Focusing too much on any individual aspect may even confuse students and detract from the broader view. The need for both theoretical and practical teaching in mechatronics studies is widely recognized.8,11 Grimheden presents an argument on behalf of experimental approach to teaching in mechatronics, 12 which relies heavily on problem and project-based learning 13 and stresses the skills which are important in collaborative learning. 14 This experiment-driven approach can be interpreted as hands-on projects done in groups. Admittedly, the development of new laboratory experiments and student projects is a challenging issue. 11
Interactions of the various disciplines can be demonstrated in a laboratory environment by a variety of teaching aids, such as physics experiments, laboratory kits,15–17 programmable robots18–20 and other similar didactic devices.21,22 These devices can be built in-house23,24 or obtained from commercial vendors. Their intended purpose is to showcase the operation and analysis of the system rather than how or why such systems are designed. We would like the students to participate in the design and construction of the demonstration devices instead. This does not appear to be a common practice based on the review of the teaching/learning methodologies in control, automation and robotics by Afonso et al. 25
In mechatronic systems, good mechanical design forms a base for the interoperability of the different disciplines. For example, excess friction in a sensor measuring the motion of a delicate mechanism may ruin the performance of the control system. Therefore, it is important that the students gain an in-depth understanding of the concrete physical nature of the systems they are designing. Without this knowledge, a mechatronics engineer will tend to produce abstract designs that turn out to be difficult to assemble, adjust and control. Unfortunately, textbook examples alone are typically too simplified to provide a comprehensive overview on practical matters such as tolerances (clearances and interferences), backlash, friction, misalignment, flex and balance. Attention to the low-level physical practicalities of mechatronic devices helps to dispel the common illusion that poor mechanical design can always be compensated with good control systems.
This article focuses on a framework of a student project in mechatronics. The idea of the proposed concept is to teach mechatronics device design in a project-like setting, but also to improve student awareness of the mechanical details through a real-life example that is easy to build yet difficult to perfect. Our aim is to strike a balance between a fully constrained laboratory experiment and an open-ended capstone project by applying necessary constraints with minimum limitations on the execution of the task. We expect this approach to produce more even learning outcomes by better focusing the workload and effort of the teaching staff.
Analysis of the earlier course assignment concept
The project work assignment at the focus of this article is carried out within a unit titled ‘Advanced course in mechatronics’ at the University of Oulu, Finland. This unit, here referred to as a ‘course’ as translated from Finnish ‘kurssi’, awards eight ECTS credits and takes place during one semester at the end of the whole mechanical engineering study programme specialising in mechatronics. This course is elective for other study programmes in the faculty of mechanical engineering with the assumption of completing the introductory course titled ‘Mechatronics’. The assignment is similar in function to a capstone project but serves the purposes of this mechatronics course in particular. It is meant to be a comprehensive practical exercise in mechatronics with an emphasis on implementation and mechanical design. After this course, the students should be ready to commence their master’s theses.
Previously, the students were given a free choice to invent their own topics, as approved by the teacher in each case, or to select from a pre-approved list provided by the teacher. The students chose topics from a wide range, such as building a stabilized gimbal-mechanism for a camera using an accelerometer and two stepper motors, a SCARA-arm made of hobby servos and wooden chopsticks, or a simulation model of a control system of an electrically assisted bicycle. The students would work in groups of two to four people to design and implement a mechatronic device or a model and write a report of their work. The work would be presented in a seminar at the end of the course. The work, the presentation, and the report would all be graded. The devices themselves were typically constructed using simple inexpensive tools or ’lightweight’ machinery available within the campus. The materials would be sourced by the students from local hardware stores or online vendors. The faculty would provide parts and materials where possible, while any other approved cost items would be purchased by and reimbursed to the students.
The primary advantage of the previous approach is to grant the students the flexibility to influence their own studies and work with motivating topics they are personally interested in. The students entering the course come from a variety of backgrounds with different elective courses in areas such as electronics, programming, production management, three-dimensional (3D) modelling, etc. which they can employ to good effect as individuals and as complementing members in the group. The freedom to choose allows the participants to explore a wide range of skills and apply knowledge in a practical way. Since the students build the devices by themselves, they get hands-on experience and immediate feedback of their own design choices. The past works have been versatile and often very interesting for the entire class.
The main disadvantage of the previous approach has been that every group has had a different topic, which is hard to compare in degrees of difficulty or scope. Sometimes the students’ proposed topics turn out too ambitious and they require extensive guidance and resources from the teacher. On the other hand, students would sometimes choose a topic from well within their own comfort zone, leveraging their personal competencies in particular areas to avoid challenges in others, which leads to deficient learning outcomes. This sets a challenge for equal grading and requires careful vetting of the work topics to ensure they meet the educational targets. The teacher has to perform extra background research as well to understand the particular questions the students are facing, which can take considerable time.
We set out to try how our students respond to a single definition class project instead of a capstone project and what improvements can be gained in the teaching, particularly in emphasizing a balanced outlook of the different aspects of mechatronics. The intent of the exercise is to allow the students to apply the theories and concepts of each discipline involved in mechatronics in a hands-on way to support their learning outcomes. It should help them to understand the synergistic nature of a mechatronic device and train students for working on group projects.
Formulating the new concept
Building on the earlier concept, the new assignment should first harmonize the grading and improve the teacher’s ability to guide students without adding excessive workload on the teacher. The cost of the physical devices constructed during the assignment should remain low and their manufacturing should be done with inexpensive accessible tools and machinery as before. The exercise should avoid constraining the students into a structured performance with a list of instructions; it should allow free exploration of the topic and the space to learn from mistakes and discoveries. However, the assignment should not permit the students to bypass any of the important topics in mechatronics to be comprehensive.
To achieve these goals, the students will still work in groups of two to four people, but the groups are no longer able to choose the topic freely. Instead, every group is assigned the same topic, some basic rules or limitations, and given the freedom to implement the idea however they see fit. The same approach has been suggested also by Carryer. 26 The work is divided into two phases: the designing phase and the implementation phase, with a mid-course interview in between. While the groups are responsible for their own organization and time management, they are required to present their plan and a project schedule at the mid-course interview before they are granted permission to proceed. At this point, the teacher can introduce additional materials and references to make sure the students’ design is viable. An inexperienced student will typically under-estimate the amount of work, which leads to procrastination and completing the exercise poorly in insufficient time, so the interview works to nudge the students towards proper time management. The exercise ends in a seminar, where each group will present their work in class. Each group will also write a report of their work.
Various non-stable mechanisms, such as inverted pendulum balancing robots27,28 or ball-on-plate systems, 29 can be used to exemplify a simple mechatronic device. Our version is a more constrained balancing problem that should be easy enough to construct and delicate enough to be affected by errors in design and construction, but not too sensitive to become impossible to control. The mechanism we chose is a see-saw board with two computer fans used for actuators to drive the pivot to a desired angle under feedback control. Knowing the amount of work and the limited time available to the students, we chose to build a ‘teacher’s reference’ model first as a starting point. This reference model is introduced to the students as an example. Constructing a working prototype in this manner is a well-founded practice 30 since the prototype is instrumental in identifying the characteristics of the device. The basic mechanical structure of the teacher’s reference model can be seen in Figure 1, and a system-level description shown in Figure 2. The completed teacher’s reference model is shown in Figure 3. To avoid directing the students towards particular solutions and methods, they are not provided with any detailed drawings, diagrams or instructions of the reference model. If the students wish to copy the design, they should have to reverse-engineer it.
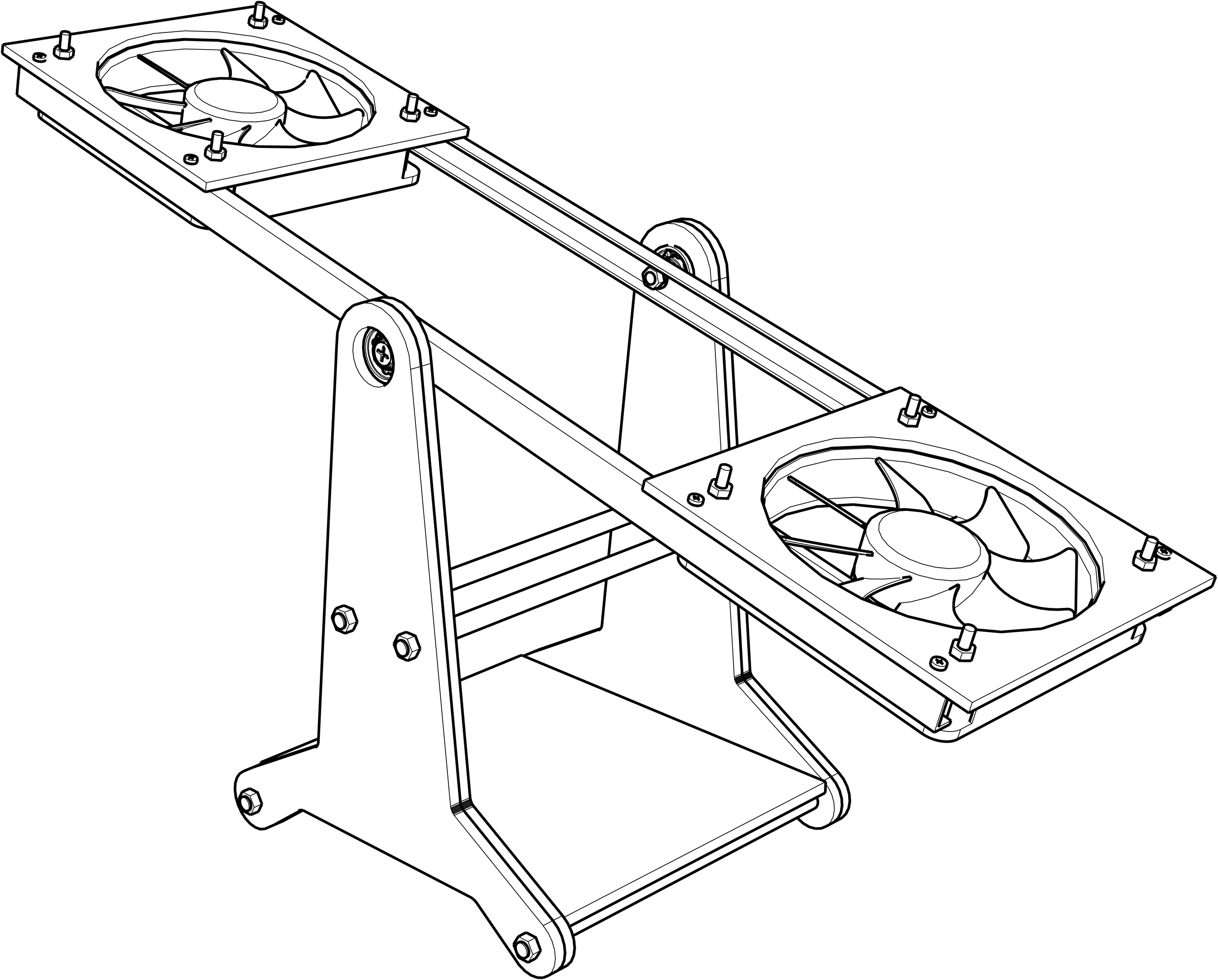
Basic mechanical structure of the teacher’s reference model.
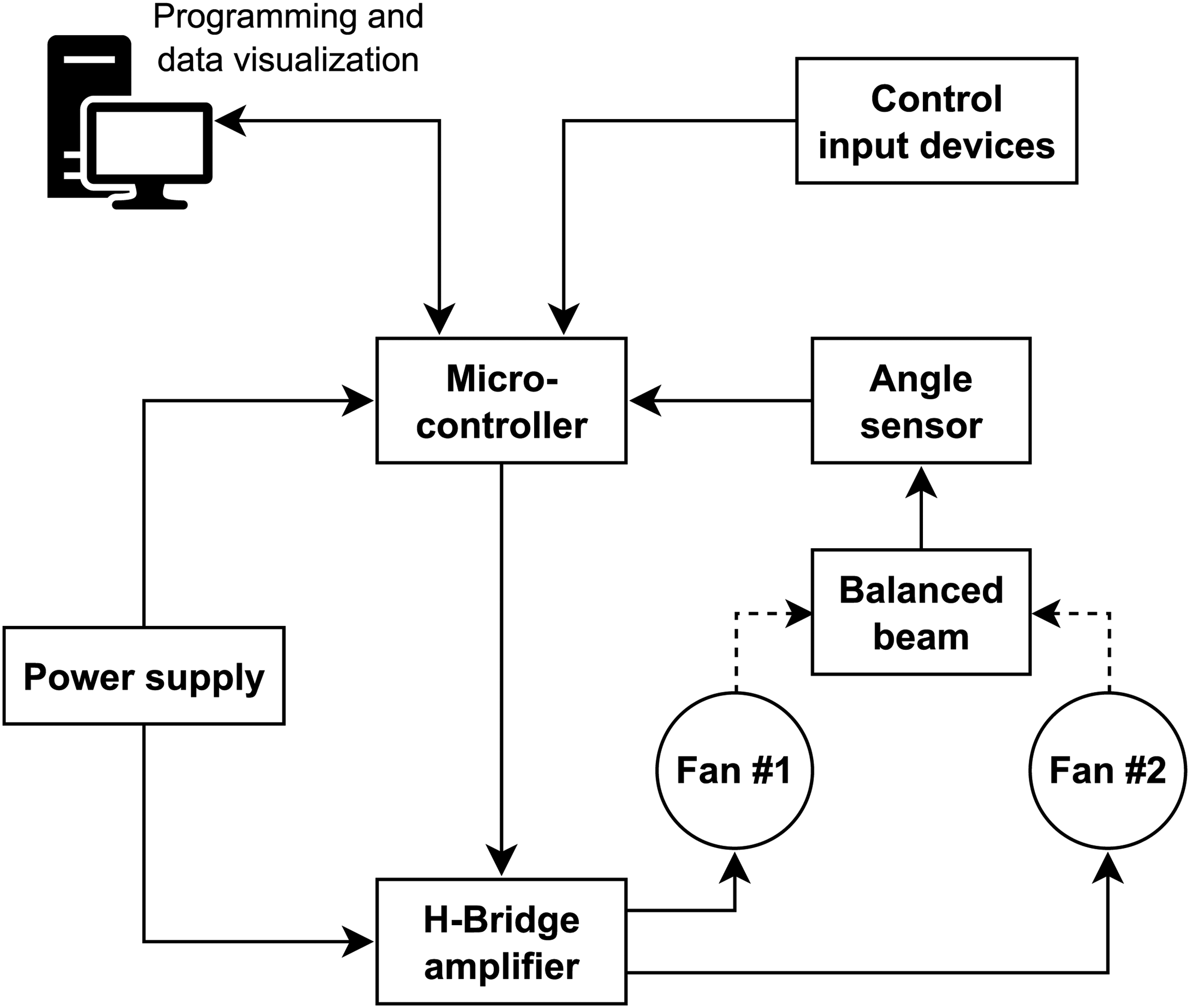
System diagram of the teacher’s reference model.
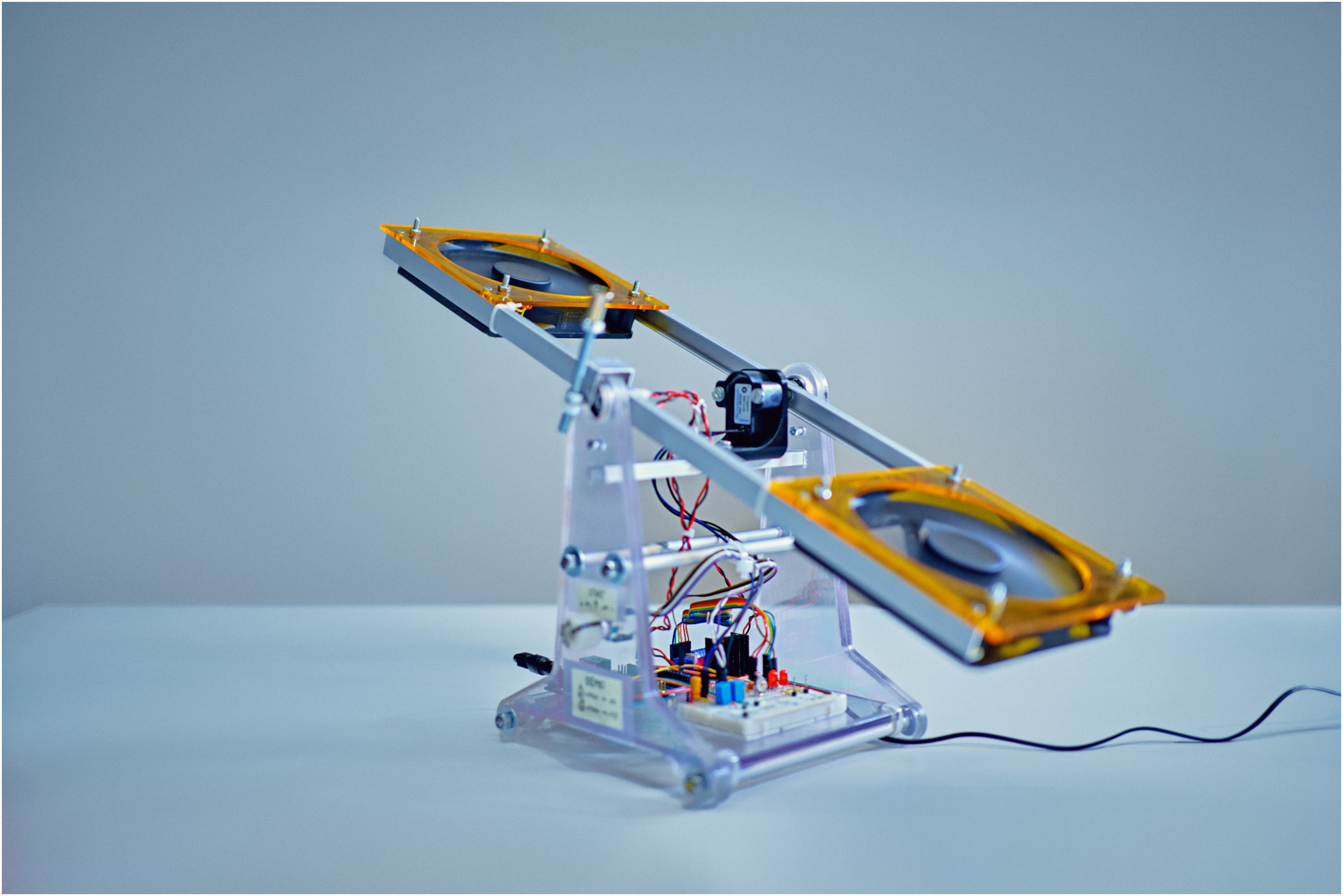
Teacher’s reference model. Image source: Mikko Törmänen, used with permission.
There are also commercially available teaching aids and construction system kits that could be applied instead. These systems provide dense completeness with precisely specified tasks; they are tested to be functional in their intended application. This leaves the teacher’s role simply to supervise the students through a pre-determined performance. Since they consist of modules that work together by design, they actually skip over many important aspects of designing a mechatronic device from the ground up. As such, these kits reflect their manufacturer’s second-hand interpretation of the teacher’s intent. For this reason, ready-made teaching aids and construction kits were rejected. Instead, we chose to provide the students with some of the same components and materials used to build the teacher’s reference model and set them to figure out the rest.
The new approach addresses the difficulties in controlling the learning outcomes by adjusting the limitations and freedoms of the assignment. A common task allows the teacher to adjust the level of challenge as needed for the students. The students may not be able to leverage their individual skill sets or influence their studies as much as before, but this trade-off appears necessary in order to ensure fair grading and to guide the students towards the core problems and questions that the teacher wants to address. Common questions and issues arising along the course of the exercise can then be efficiently addressed with common materials, which improves the teacher’s ability to guide subsequent classes of students.
Pedagogic and didactic considerations
The requirements of the updated assignment have consequences for the practical implementation of the new course exercise. Some arise directly out of the topic and context itself, while others such as the demands on reporting or timing may depend more on teacher preference. We have collected the following:
Pre-requisites
To successfully complete the exercise, the students should have a sufficient understanding of computer-aided modelling, manufacturing, mechanical design, and engineering methods. Knowledge of statics, strength of materials, joints, linkages, and rotating machine elements are needed to understand why the device works. The students should also have some experience with electronic circuits and methods of analysis. For the software implementation, the students will need at least some knowledge of embedded micro-controllers, basic programming skills, and theoretical concepts including proportional–integral–derivative (PID) controllers and system dynamics. Finally, project management and scheduling are necessary to deal with the organizational aspects of the work. All these topics are generally found among the courses offered to students of mechatronics or introduced otherwise.
The teacher should have a supply of reference materials and solutions on offer, on topics such as bearing selection, 3D printing, etc. where the students may be struggling. Tutoring and training materials should be provided where needed, while the students are encouraged to seek information independently. Providing exact solutions and answers should be avoided to allow the students to explore the task freely. In our case, we chose to provide material regarding the Arduino platform and its use in electronic circuits, since this is not covered in the mechatronics curriculum unless pursued by the students themselves.
Methods
The structure of the exercise follows a typical industrial engineering project in many aspects. Choosing a group exercise as a method of teaching over individual assignment lets the students practice additional real-life working skills, such as project and data management in a workgroup. The time available for the work is limited to approximately three months; the students are working on other courses at the same time, and few students are skilled in every single area required for the assignment. Working in groups, the extent and the challenge of the assignment can be set greater compared to working alone.
Experience shows that students prefer fast solutions and answers to complete their assignments quickly and won’t readily seek advice if doing so would interrupt their working. This leaves the students with errors that show up in the later stages of the work. That is why, although the teachers are always available for questions and advice, the teachers must actively supervise the work. The students are called in for a review before they are permitted to start manufacturing their devices, to prevent students from repeating typical mistakes and omissions.
Examining the physical device alone does not reveal whether the students have understood the fundamental concepts, since it’s possible to copy designs without critical analysis. Therefore, the students are required to write a free-form report to explain and illustrate the design and theory behind their device, and evaluate its performance according to the criteria and targets they have set for themselves. This final report can also work as an exercise in documentation, depending on the requirements of form and content set by the teacher.
Scheduling
The project is divided into two parts. The first part takes approximately one-third to one-half of the course time. The broad outlines of the task and the necessary materials are introduced first during an exercise in class. The students will form groups to begin the task of mechanical and electrical design. Each group will also compile a short presentation that includes the specifications and requirements that the group aims to achieve, drafts of electrical diagrams, drawings, lists of required building materials, and the group’s project schedule for the second part of the exercise. This mid-course presentation and review between the group and the teacher is meant to correct any serious errors in the students’ work and make sure the group has a workable plan for part two. Additional materials and design resources are introduced after the reviews. Once the plans are revised and approved, the groups are permitted to start building the device and writing their final report. The exercise concludes at the end of the course with a final meeting between students and the teacher where each group has a chance for a free-form presentation to compare their experiences, display the devices they have built, and discuss their results with the class.
Grading
The main focus of grading is the final report to the teacher. The final report is graded on a regular 0–5 scale according to how well it covers the relevant theory and engineering practices, their application, and displays an understanding of the synergy between different aspects of mechatronics. The practical portion of building and presenting the device is graded pass or fail by whether the device completes the minimum functional criteria given by the teacher in the task introduction. The grading emphasizes the reporting, documentation, and analysis of the task and the device, rather than its level of performance for the purpose of the exercise is to provide the students with the practical experience of designing and building a working system. Instead, the students are rewarded for correctly analysing their challenges, or penalized for ignoring obvious errors and omissions. In our case, we also wanted to emphasize on students understanding the importance of good mechanical design as a precursor to effective system control. The students may pass the practical portion of the exercise even if their device works poorly, or fail by displaying a serious lack of effort or a misunderstanding of some fundamental aspect of the work.
Results
This new concept has been tried over two consecutive autumn terms, with a total of 21 students in eight working groups. Each time the students were requested to complete a voluntary self-assessment questionnaire. The questionnaire was implemented to better gauge the entry skills and strengths of the students and wasn’t conducted before. While such direct quantitative comparison to earlier years is not available, the experiences and observations of the teaching staff over several years can be used for qualitative assessment.
In the questionnaire, the students were first asked to give themselves a score on their starting skill level relative to their present understanding on a scale from 1 to 5. A lower score here means greater perceived improvement. Similarly, the students were asked how well they understood the concept of synergy in mechatronics based both on the course lectures and on the course assignment work. Here a higher score on a scale from 1 to 5 means greater perceived improvement. Due to the voluntary nature of the questionnaire, only 13 students completed it, which is little over 60% of the participants. The results of the questionnaire can be seen in Figures 4 and 5.
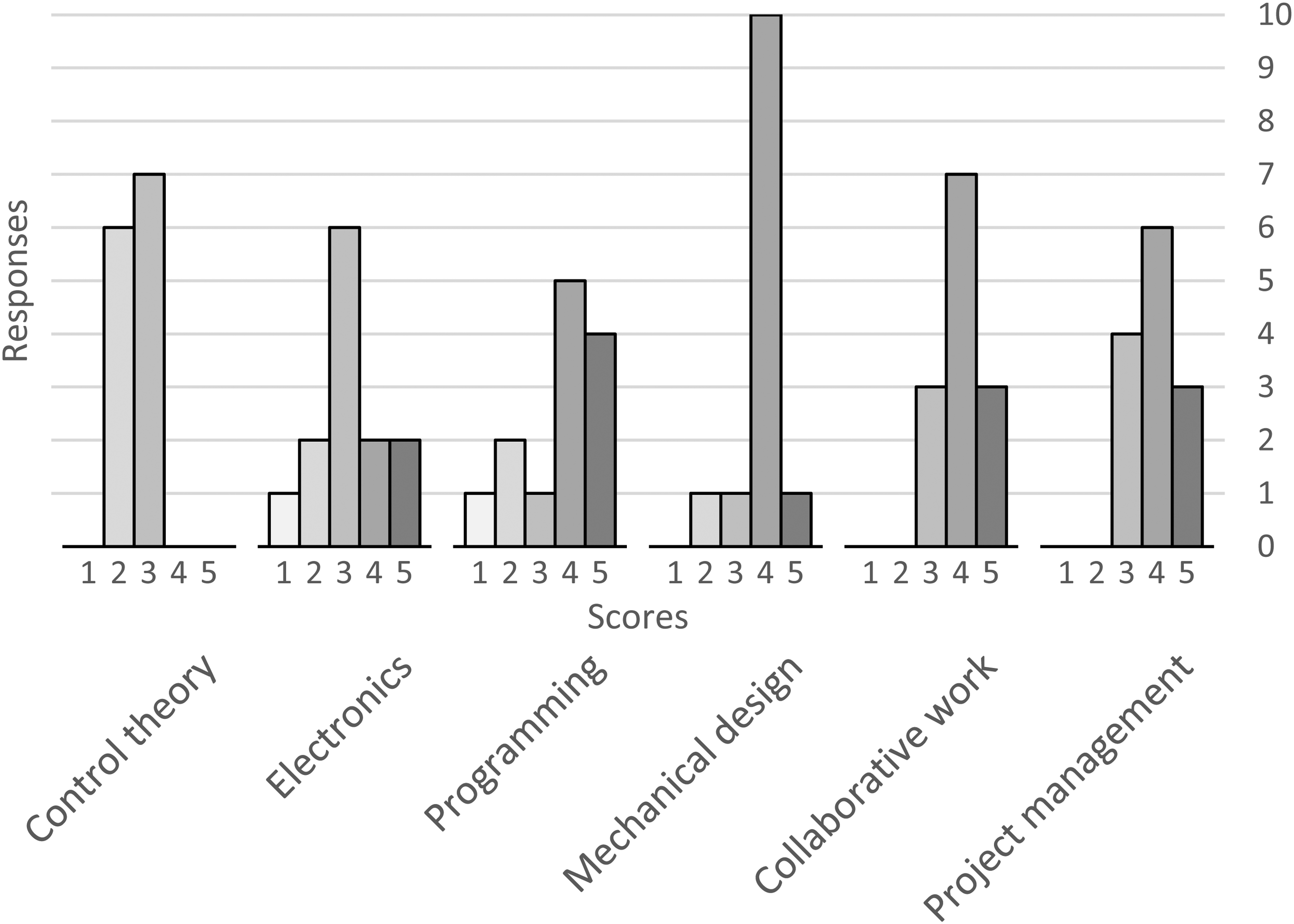
Students’ self-assessment scores before the exercise in various areas of the assignment.
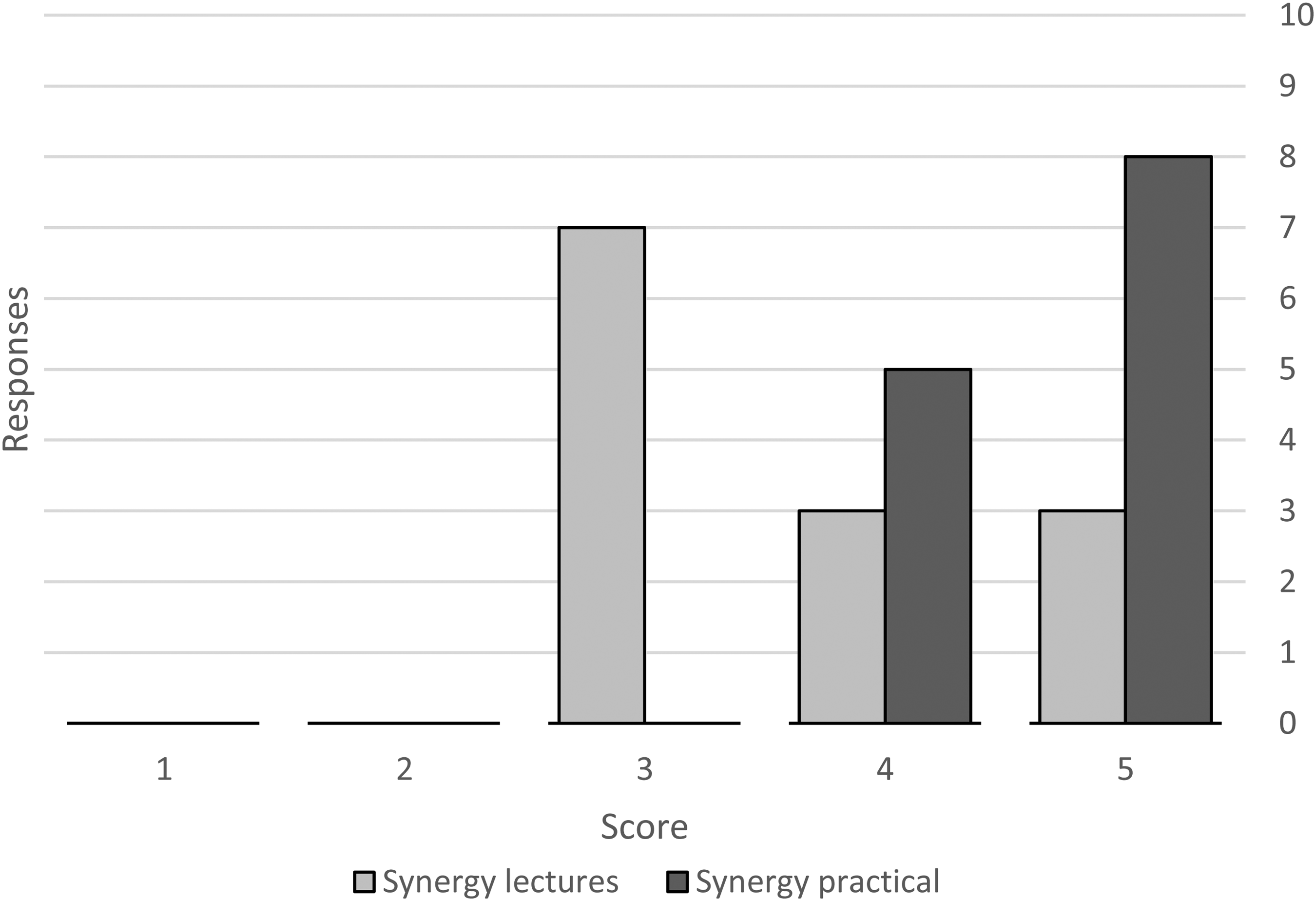
Students’ self-assessment scores on the concept of synergy in mechatronics through lectures versus practical work.
All groups were able to complete the exercise to the required level, although none of the implementations quite reached the performance of the teacher’s reference model. The students were struggling with simple mechanical design issues such as aligning and fitting parts together. Although very simple to build, the balancing beam mechanism turned out to be sensitive to variable friction and forces caused by the misalignment and flexing of the frame. All groups had some issues regarding the smooth movement of the beam. These issues caused challenges in the programming and tuning of the PID controller later. Many commented this was the first time they were tasked to design and build a complete mechatronic device.
The groups had all prepared plans for their devices in advance, but the actual devices deviated significantly from the drawings, most commonly because the planned materials were not procured and the students substituted whatever was available. Listening on the student comments, the issues and problems in constructing the model device were identified and understood, but the students did not notice to check on the availability of resources in advance, nor reserve the time to address the issues with a complete revision, so they were forced to come up with ad-hoc workarounds. One group had issues with a stuck bearing, which they solved by allowing the axle to rotate inside the faulty bearing; they did not ask for a replacement bearing. The group with the most successful mechanical implementation also chose to add features which were not originally specified or required, such as graphical data displays, at the expense of project time and reporting. There were no issues regarding the electronic components and use of the Arduino environment even for students who were previously inexperienced, although one group had an accident which damaged their Arduino board.
We observed a gap between theory and application: the groups gave theoretical presentations of at least some aspects of the system in their final reports, which were never applied in the practical portion. The students chose to approach the task directly by building the device and operating it instead of attempting to simulate or analyse the system first. We saw no improvement on this matter compared to previous years. The students avoid mathematical analysis unless specifically demanded. The choice of control parameters for PID tuning happened by trial and error and many commented they had difficulties finding appropriate values, although the topic had been introduced during lectures.
In contrast to earlier years, the students were more engaged and active, especially during the end discussion and presentations. The greatest subjective improvements were seen in the categories of control theory and electronics, while the students found themselves fairly competent in areas of programming, mechanical design and project organization related topics. The results of the question on synergy suggest the practical exercise had a greater effect on their understanding. The students were still passive about asking for assistance, but the teachers were able to address some of the common mistakes by observing student progress through the mid-course presentation.
The estimated cost of hardware consists of a fixed cost around 165 € (sensors, Arduino boards, fans, power supplies, motor controllers, USB-cables etc.), and recurring costs (wires, bearings, building materials etc.) of
When comparing the time used on planning and executing the exercise, the initial preparation requires significantly more effort from the teacher in building and documenting the reference model and preparing materials for the students. However, on the next year the workload is mostly reduced to amending the documentation.
Discussion
Overall, the new exercise meets the set requirements as planned. Every group managed to build a working device that completed the set requirements. The structure of the exercise first permits the free exploration of the topic and then brings the students back towards a more structured form through the mid-course review. The powered see-saw mechanism turned out excellent for covering the major subjects of mechatronics, in part because the mechanism is delicate enough to show typical structural and mechanical issues on a tabletop scale. The materials can vary from cardboard to plastics and metals, and various parts such as the cooling fans can be found recycled or new. This helps to keep the expenses reasonably low. A ready-made educational kit would not have revealed the interplay between the materials and design choices and the resulting functional outcomes. Compared to the earlier implementation, the grading was easier and more unified with the common requirements. It also makes it easier to monitor student progress and focus attention on the groups that need more guidance, creating more uniform learning outcomes. It is still possible for students to avoid some tasks within the group, but each student at least gets exposed to every subject of mechatronics through the collaboration.
In this type of exercise, the role of the teacher is transformed from a lecturer into a supervisor or a ‘client’ for the student groups, giving both recommendations and requirements but also accepting suggestions and innovation from the students. The teacher may instruct the students in their solutions without forcing particular methods or choices. Where a common problem was identified, the teacher could write instructions that would help all the groups and save future work. Many of the issues could be anticipated by constructing the teacher’s reference model in advance.
The results and student reports still suggest that the students are handling the matter as if it was an exam question, where every part of the problem has a definite correct answer. They tend to latch on to any materials and examples provided by the teacher, making their work more like mechanical application of pre-defined knowledge. This raises the question: in the past when the students had a free choice of topic, did they actually seek to replicate examples with known solutions instead of challenging themselves? While the students considered themselves to be fairly good mechanical designers before and after the exercise, they still repeated common errors. Correctly identifying and analysing these problems requires further attention.
In our opinion, this approach is flexible enough to accommodate students from various backgrounds and allows the teacher to adjust supplied materials according to their students’ particular needs. Rather than dividing attention on examining multiple different questions from a variety of topics, the teacher is able to provide more comprehensive assistance on questions relating to the common task. Student experiences are enhanced when the teacher is able to respond and provide guidance more efficiently. One improvement on the revised assignment would be to demand a dynamic simulation in the mid-course review and in the end report. The students avoid this work because the devices can be constructed on an empirical trial and error basis. Greater emphasis should be put on early planning and understanding the device before it is built.
Conclusion
In this article, we describe an alternative implementation of a course assignment work in an advanced course in mechatronics and compare it to the earlier implementation.
The main idea behind this new implementation is to clarify the form, goals and assessment criteria of the assignment. The structure of the assignment is designed to give students the opportunity to investigate the problem freely with minimal necessary limits set by the teacher. The purpose of this new concept is also to control the learning outcomes so, that every discipline involved in mechatronics is dealt with during the assignment. For the assignment, the students design and implement a controllable see-saw balancing board powered by two computer fans.
This new implementation of the course assignment work produced good learning results, eased the assessment of the students’ performances, and was relatively cheap to implement. The students were motivated and satisfied with the structure of the work and reported to have achieved a clearer understanding of the synergy between the different disciplines of mechatronics. The students reported having gained new knowledge especially in the areas of control theory and electronics. We noticed that the students need more encouragement and guidance on analytical research and acquiring information independently outside of the materials provided by the teacher. Overall, the new implementation met our requirements well.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.