
Abstract
Understanding elastic instability has been a recent focus of concentric tube robot research. Modeling advances have enabled prediction of when instabilities will occur and produced metrics for the stability of the robot during use. In this paper, we show how these metrics can be used to resolve redundancy to avoid elastic instability, opening the door for the practical use of higher curvature designs than have previously been possible. We demonstrate the effectiveness of the approach using a three-tube robot that is stabilized by redundancy resolution when following trajectories that would otherwise result in elastic instabilities. We also show that it is stabilized when teleoperated in ways that otherwise produce elastic instabilities. Lastly, we show that the redundancy resolution framework presented here can be applied to other control objectives useful for surgical robots, such as maximizing or minimizing compliance in desired directions.
Keywords
1. Introduction
Concentric tube robots have garnered considerable interest in the continuum and surgical robotics communities in recent years. They can achieve bending and elongation via the elastic interactions of their nested, precurved tubes (see Figure 1), effects which are described by mechanics-based models (Rucker et al. 2010; Dupont et al. 2010). These devices have been applied to a number of minimally invasive surgical applications because of their small diameter and dexterity. For a review of concentric tube robotics research and applications, see (Gilbert et al. 2016a). Three-tube concentric tube robot. Each nested tube can independently translate and rotate. Concentric tube robots with highly curved tubes can “snap” from one configuration to another due to rapidly released torsional energy. Real-time control schemes must be developed that prevent these elastic instabilities from occurring during teleoperation.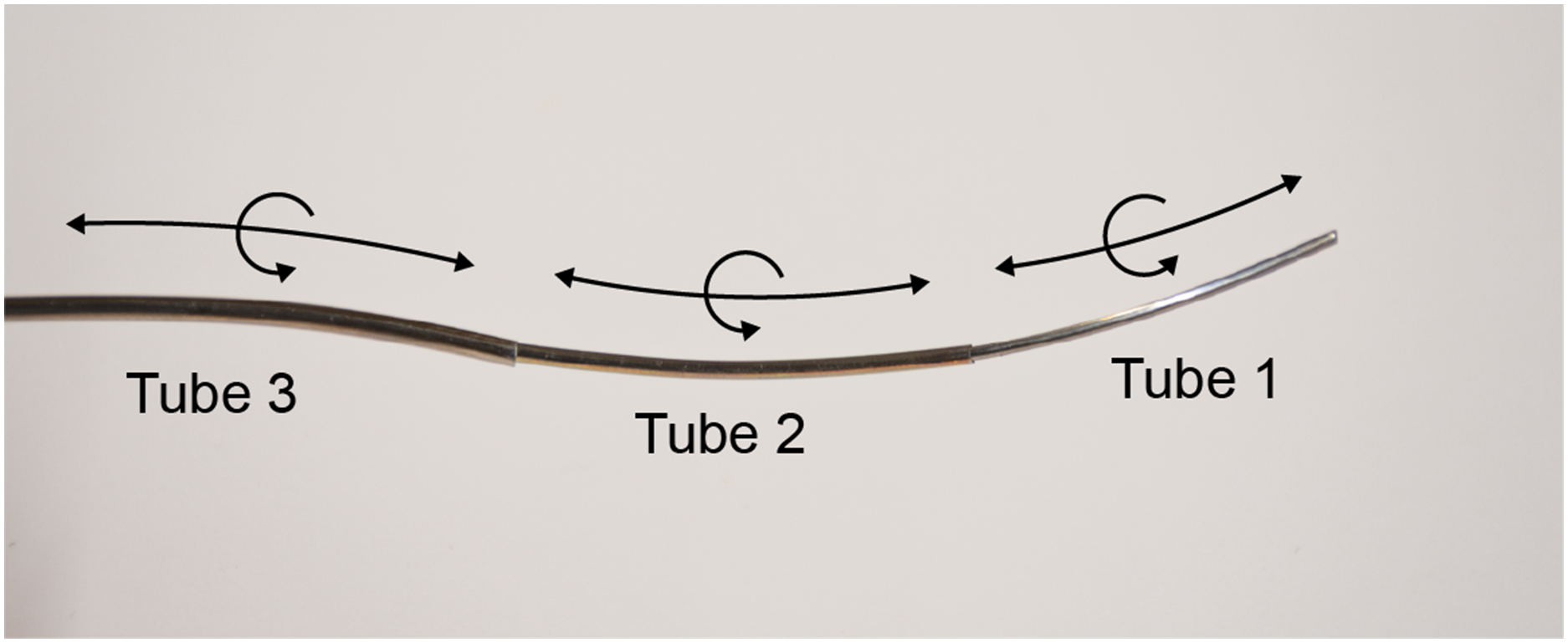
Despite many recent advancements in design, modeling, control, and practical applications, concentric tube robots have thus far been limited to maximum curvatures far below the theoretical upper limit provided by Nitinol’s maximum recoverable strain. Yet, higher curvatures are often desirable because they enable the robot to work in smaller, more constrained spaces. The reason concentric tube robots have been limited to curvatures far below the maximum recoverable strain limit of the material is that highly curved tubes, when nested within one another and axially rotated, store torsional elastic energy. If the tubes rotate too far, they will exhibit an elastic instability, rapidly releasing this energy and “snapping” from one configuration to another. This snapping effect has recently been studied from design (Hendrick et al. 2015; Bergeles et al. 2015; Luo et al. 2018; Ha et al. 2014) and modeling (Gilbert et al. 2016b; Ha et al. 2016) perspectives. Actuator motions likely to create snapping can now be predicted, and metrics for stability have been derived.
To date, elastic stability-aware control has primarily been achieved in an a priori, motion planning sense. An early metric for stability was torsional windup (Bergeles and Dupont 2013), which has been used in planning stable paths (Bergeles et al. 2015). Gilbert et al. devised a relative elastic stability metric and used it to produce stability maps for planning purposes (Gilbert et al. 2016a). These examples of stability-aware planners do not run rapidly enough to avoid snapping during real-time teleoperation. The goal of this work is to integrate instability avoidance into a real-time controller so that a user can control the robot safely.
Real-time control of concentric tube robots has been an important research topic in recent years. Several methods involve precomputation of the robot’s forward kinematics or path plans; the inverse kinematics can then be solved online at each time step using root-finding methods (Dupont et al. 2010) or a local inverse kinematics solver such as damped least squares (Torres et al. 2015). Local Jacobian-based methods seek to solve the inverse kinematics online with no need for precomputation. For example, Burgner et al. proposed a weighted damped least squares (WDLS) approach that incorporates tracking, damping, and joint limit goals (Burgner et al. 2014). This is an efficient Jacobian-based approach that can be solved at each time step with low computational burden. Other examples of Jacobian-based damped least squares control of concentric tube robots include (Fagogenis et al. 2016; Xu et al. 2013). Our proposed approach in this work uses a similar WDLS approach to (Burgner et al. 2014) that also incorporates instability avoidance and stiffness goals.
These online inverse kinematics methods have also been used for instability avoidance. Leibrandt et al. have explored rapid, online motion planning for concentric tube robots while integrating elastic stability into the framework (Leibrandt et al. 2015, 2017a). While it has been shown that it is possible to compute these replanning approaches rapidly enough for use in real time control via parallelized computing, they are computationally intensive and often require some a priori knowledge of the environment and/or the desired path. Implementation of these approaches typically requires multi-core parallel computing or graphical processing unit (GPU) computing methods. In contrast, the redundancy resolution approach we present in this paper is computationally inexpensive and requires no a priori information. Of course, the tradeoff for these advantages is that a redundancy resolution approach like ours makes no claims of global optimization to a desired final path—it will only locally optimize among competing objectives at each time step—but it is useful for teleoperation when anatomical constraints are not accurately known and/or the user’s intended path is not known a priori. The ability of our method to move the robot away from unstable configurations is also an advantage over the rapid planning method in (Leibrandt et al. 2017a); if the user enforces a particular trajectory, it is possible that the online inverse kinematics solver cannot escape local minimum due to the formulation of the stability constraint. Leibrandt et al. also used the online inverse kinematics solver to integrate dexterity goals; the dexterity measure penalizes columns of the Jacobian based on joint limits, anatomical collisions, and configuration stability (Leibrandt et al. 2017b). Since we employ a computationally efficient Jacobian-based approach, the controller moves the robot away from instability using knowledge of each joint’s effect on the robot’s stability. This is a noted limitation of (Leibrandt et al. 2017b) that arises from the high computational cost of the rapid planning GPU approach. Additional extensions in this paper beyond the work of (Leibrandt et al. 2017b, 2017a) include the integration of stiffness objectives, and experimental evaluation on a physical robot prototype. A final distinction is our use of a stability metric derived from first principles (Gilbert et al. 2016a), whereas Leibrandt et al. used a torsional windup stability metric (Bergeles and Dupont 2013).
Khadem et al. employed a redundancy resolution approach to integrating instability avoidance into an online concentric tube robot controller (Khadem et al. 2019). They used a gradient projection method in which the secondary control goal is to reshape a force-velocity manipulability ellipsoid toward a sphere to ensure that the Jacobian is full rank. Our method uses a stability metric that is derived from first principles which enables the controller to enforce an exact stability threshold. In addition, our use of a WDLS redundancy resolution formulation enables the controller to override user trajectories that will make the robot unstable, whereas null-space methods must always satisfy the primary tracking task even when that task could cause instability. An additional advantage of our approach is that it pushes the system away from instability, whereas approaches that seek to iteratively maximize manipulability, like that of Khadem et al., can sometimes push the system toward instability.
It is also desirable to control the stiffness of a concentric tube robot in real time, based on application requirements. Recognizing this, Mahvash and Dupont proposed the first stiffness controller for concentric tube robots (Mahvash and Dupont 2011). They used a deflection model to control the robot tip stiffness, based on real-time measurements of the tip location made with a magnetic tracking coil. In some applications, it may be advantageous to keep an open lumen in the concentric tube robot for surgical instruments or suction/injection, rather than consuming it with such a tracking coil, and image-based tip position sensing may be unavailable or insufficiently accurate. Yet control of tip mechanical impedance may still be useful, such as to enable the robot to gently interact with delicate tissues or forcefully interact with tissue (as must occur when a needle is being driven through tissue), as has been shown in the past with tendon-operated and multi-backbone continuum robots (e.g., see (Kim et al. 2014; Bajo and Simaan 2016)). One method for controlling tip stiffness is to examine its unified force-velocity manipulability ellipsoid (Khadem et al. 2018, 2019). In these works, the controller seeks to reshape the force-velocity manipulability ellipsoid in order to increase its force application capabilities. Our approach seeks to optimize stiffness using the compliance matrix at the tip of the robot (although different metrics could easily be incorporated into the framework).
The redundancy resolution framework we present in this paper enables simultaneous stiffness tuning and instability avoidance. Redundancy resolution has previously been applied to other kinds of continuum robots to accomplish a variety of objectives. For example, controllers for hyper-redundant robots have been developed that simultaneously command both end effector pose and backbone shape (Chirikjian and Burdick 1994, 1995). Redundancy resolution has also been used to reduce actuation forces of tendon-actuated (Camarillo et al. 2008; Yip and Camarillo 2014) and variable diameter continuum robots (Abah et al. 2018), avoid buckling in multi-backbone continuum robots (Simaan 2005), improve stability in magnetically controlled continuum catheters (Edelmann et al. 2017), avoid joint limits in multi-backbone robots (Bajo et al. 2012) and robots with multiple rolling joints (Berthet-Rayne et al. 2018), and reduce visual occlusion of the endoscope field of view during surgery (Sarli and Simaan 2017).
Toward the goal of enabling higher curvatures than have traditionally been used in continuum robot prototypes (i.e., to facilitate the stable use of robots with elastic instabilities in their workspaces) while also achieving stiffness objectives, we present a new redundancy resolution technique in this paper. Our approach makes several contributions with respect to existing literature. Compared to rapid planning and parallelized kinematics approaches, our approach has low computational burden by locally optimizing stability (and/or stiffness) at each servo cycle with an efficient Jacobian-based WDLS method. Our method also requires no a priori knowledge of the planned path. We use a stability metric derived from first principles which exactly defines when a robot is stable or unstable, as well as how far a given configuration is from instability. Our redundancy resolution approach is formulated with the joint-specific relationship of configuration to stability and uses this knowledge to actively move the robot away from instability only when necessary. A preliminary version of some results in this paper was presented in conference workshop form in (Anderson et al. 2017). Extensions in the current paper beyond the results in (Anderson et al. 2017) include more extensive simulation results, the integration of stiffness objectives into the framework, and experimental results on a physical robot prototype.
2. Redundancy resolution algorithm
To achieve redundancy resolution with multiple control objectives for concentric tube robots, we use a weighted damped least squares control strategy. This section describes the objective function and resulting update law that incorporate instability avoidance and stiffness tuning objectives into resolved rates control.
2.1. Choice of joint space
In this work, we use the mechanics-based model of concentric tube robots described in (Rucker et al. 2010; Dupont et al. 2010). For a concise form of the equations see (Gilbert et al. 2016b). We use a notation where matrices are written in bold, upper-case, upright font (e.g., Key control variables of a concentric tube robot. The robot’s shape has been straightened for clarity. The actuation unit grasps each tube at arclength β
i
. The constrained exit point of the robot is marked at arclength s = 0. The section view A-A depicts the centerline Bishop frame and the material-attached frames of tubes 1 and 2, with angles ψ1 and ψ2 labeled. The controller presented here controls the translation variables r
i
, which are the exposed lengths of each tube, and the rotation variables ψ
iL
, which are the tube distal tip rotations.

The inner, middle, and outer tubes correspond to subscripts 1, 2, and 3, respectively, and
We use tip angles
Throughout this paper, we use the elastic stability measure proposed in (Gilbert et al. 2016b). We give this stability measure the symbol
2.2. Redundancy resolution framework
During resolved rates teleoperation, the surgeon commands a desired trajectory, which is converted to a desired task space velocity
To control a concentric tube robot to track a sequence of desired tip coordinates, we use the weighted damped least squares framework (Wampler II 1986), into which we previously incorporated tracking, damping, and joint limits (Burgner et al. 2014). In this work, we use the same tracking, damping, and joint limit goals as Burgner et al.; our contribution to this framework is the addition of instability avoidance and desired stiffness as additional objectives within this algorithm.
The damped least squares framework defines a cost function and applies weights to these potentially competing objectives. The cost function H, using the notation from (Burgner et al. 2014), is given as


which can again by minimized by setting

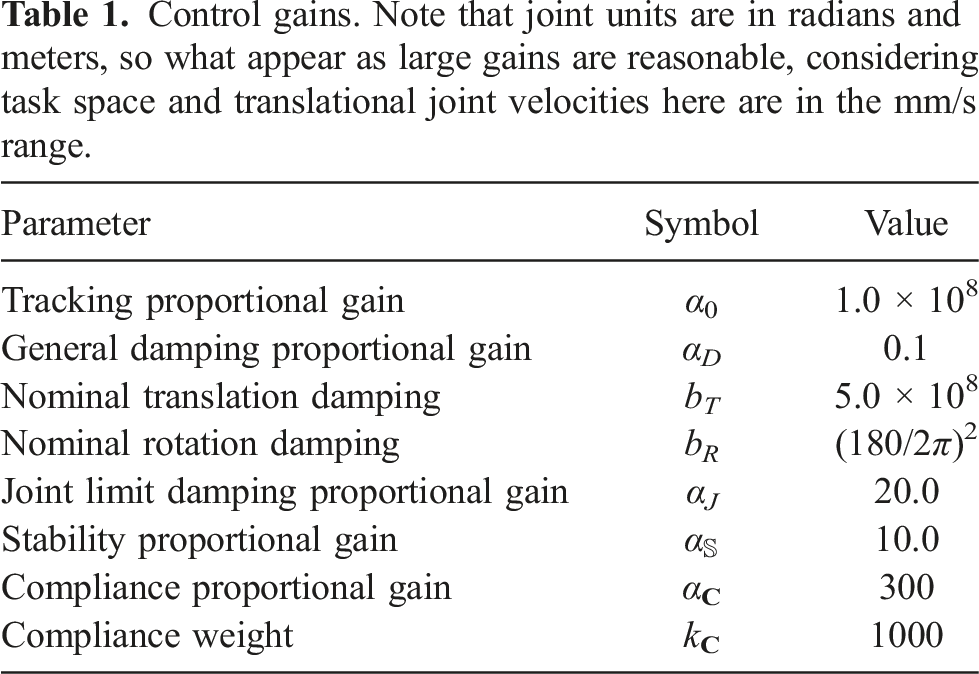
Control gains. Note that joint units are in radians and meters, so what appear as large gains are reasonable, considering task space and translational joint velocities here are in the mm/s range.
2.2.1. Tracking
The first term in the cost function (5) penalizes joint velocities 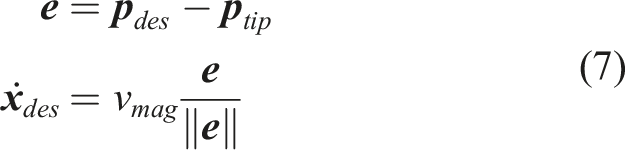



Control gains used for selecting the desired task space velocity
2.2.2. Damping
The second term in the cost function (5) penalizes high joint velocities 
2.2.3. Joint limit avoidance
The third term in the cost function (5) penalizes joint velocities 


2.2.4. Instability avoidance
When resolving redundancy to avoid elastic instability, the final term in the cost function (5) (i.e., the secondary goal) is designed to dominate the cost function when the robot configuration approaches instability as given by the metric 

By choosing the proportional gain
The instability avoidance weighting matrix (15) is designed such it does not impact the control law (6) when the robot’s stability
2.2.5. Stiffness tuning
When resolving redundancy to tune stiffness, we set a stiffness-based secondary goal in the cost function (5). To accomplish this, we make use of the concentric tube robot’s compliance matrix
While a variety of stiffness objectives can be defined based on this tip stiffness matrix, in the simulations that follow we simply use the maximum singular value of 

This means that when σ
We define a compliance weighting matrix as

3. Simulations
We first tested our redundancy resolution algorithm for both instability avoidance and stiffness tuning in simulation to verify its effectiveness, analyze its impact on the robot’s behavior, and tune the control gains. This section describes first the instability avoidance simulations, followed by the stiffness tuning simulations.
3.1. Instability avoidance simulations
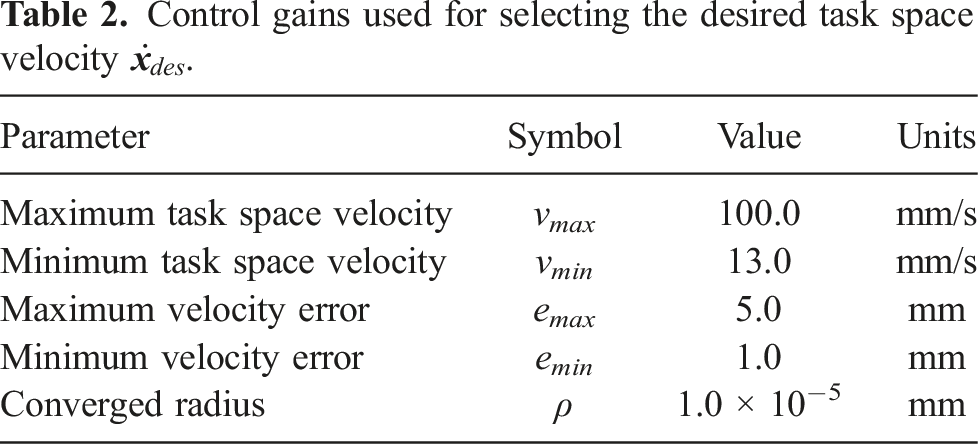
Tube parameters used in the simulations. Each underformed tube has an initial straight section, followed by a tip section with constant curvature.
3.1.1. Desired trajectory
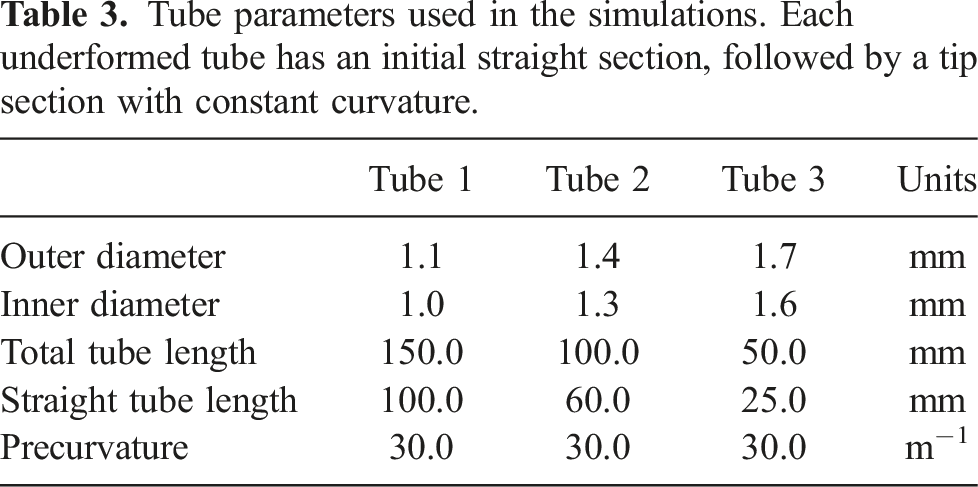
During teleoperation, the desired input velocities are those commanded by the surgeon. Here, to create an example trajectory to use in simulation, we chose a helix wrapping around a torus, as shown in Figure 3. The equations defining the desired tip position were (Left) Desired trajectory of a helix wrapping around a torus. (Right) Simulated concentric tube robot following the desired trajectory.
3.1.2. Simulation results
We performed the simulation both with (the “stability-aware” case) and without (the “stability-unaware” case) the instability avoidance term included in the cost function and control law. In Figure 4(a), we show the stability metric and tracking error throughout the entire trajectory for the stability-unaware case. Due to the high curvature of the tubes and the commanded trajectory, the robot snaps twice. However, the controller has no knowledge of this instability nor does it have a way to avoid it. Based purely on the kinematic model, the robot appears to be tracking well from the controller’s perspective. However, the physical robot is in a different local minimum energy solution than the local minimum energy solution assumed by the controller, due to the uncontrolled snapping. As soon as the stability metric first crosses to (a) When the control law is stability-unaware, the robot’s stability crosses to 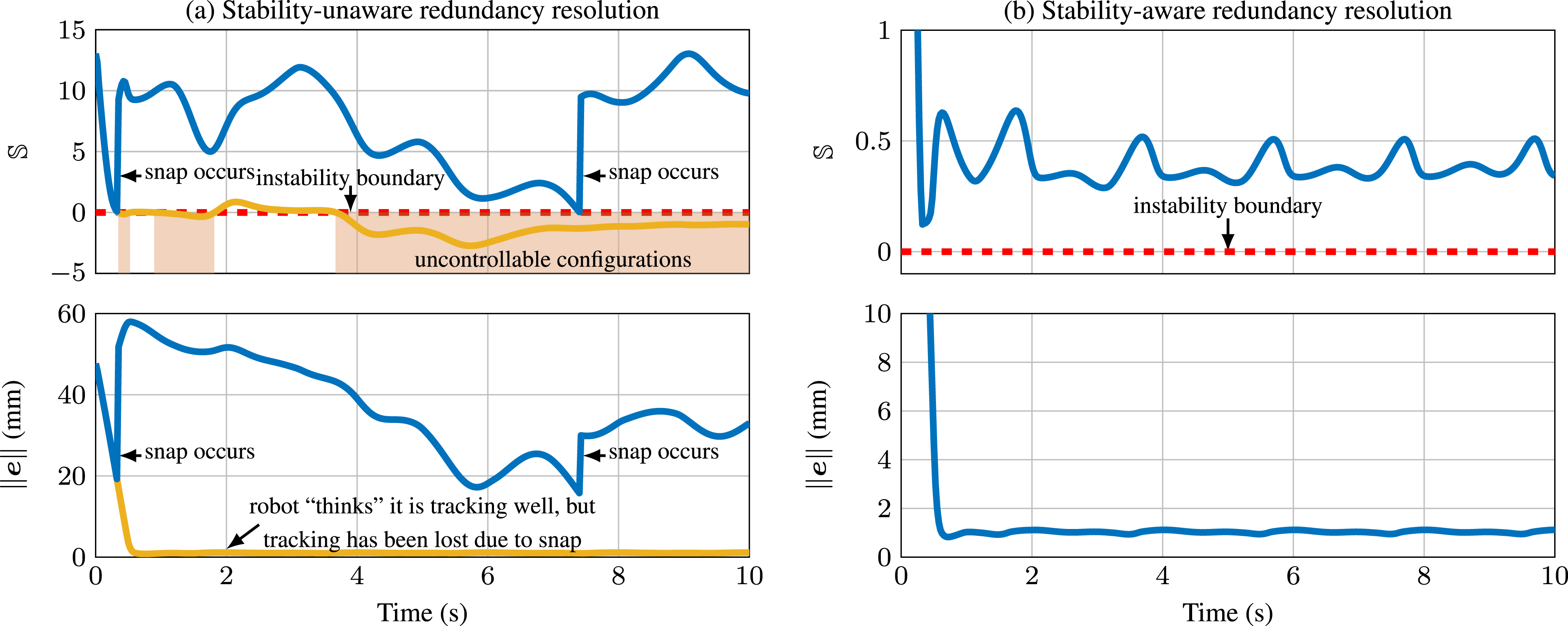
Figure 4(b) shows that using the instability avoidance control law enables the robot to avoid instabilities while maintaining good tracking ( ∼1 mm) in task space. Note that the error along the chosen trajectory is due to the dynamic trajectory and high damping; the error quickly reduces to
3.1.3. Computing the robot’s post-snap configuration
In order to generate the simulated unstable robot trajectory, we calculated the new physical configuration of the robot in cases where the robot snaps. This was necessary for finding the results of Figure 4(a). The key idea behind this problem is that, when the robot is in an unstable configuration, there are multiple configurations in model space (and therefore multiple sets of tip angles
When the stability of the robot in the simulation goes to 0, we use MATLAB’s These plots show the relative tip angle configuration space of the simulated three-tube concentric tube robot. The colormap depicts the stability measure  is the boundary of the unstable region. When the robot hits this boundary at the “before snap” point
is the boundary of the unstable region. When the robot hits this boundary at the “before snap” point  , it snaps. The new configuration it reaches after the snap can be found by searching the configuration space for a set of relative tip angles that produces the same relative base angles at the actuators (“after snap” points
, it snaps. The new configuration it reaches after the snap can be found by searching the configuration space for a set of relative tip angles that produces the same relative base angles at the actuators (“after snap” points  ). Note that the shape of the unstable region can change substantially based on tube translation variables.
). Note that the shape of the unstable region can change substantially based on tube translation variables.
Because the relative joint space is wrapped from 0 to 2π radians we must convert the new relative tip angles to absolute angles. To do so, we first assume a configuration of 
The new robot configuration is shown by the “after snap” points in Figure 5. This approach could potentially be used in a physical system to “recover” tracking should a snap occur.
3.1.4. Effect of instability avoidance
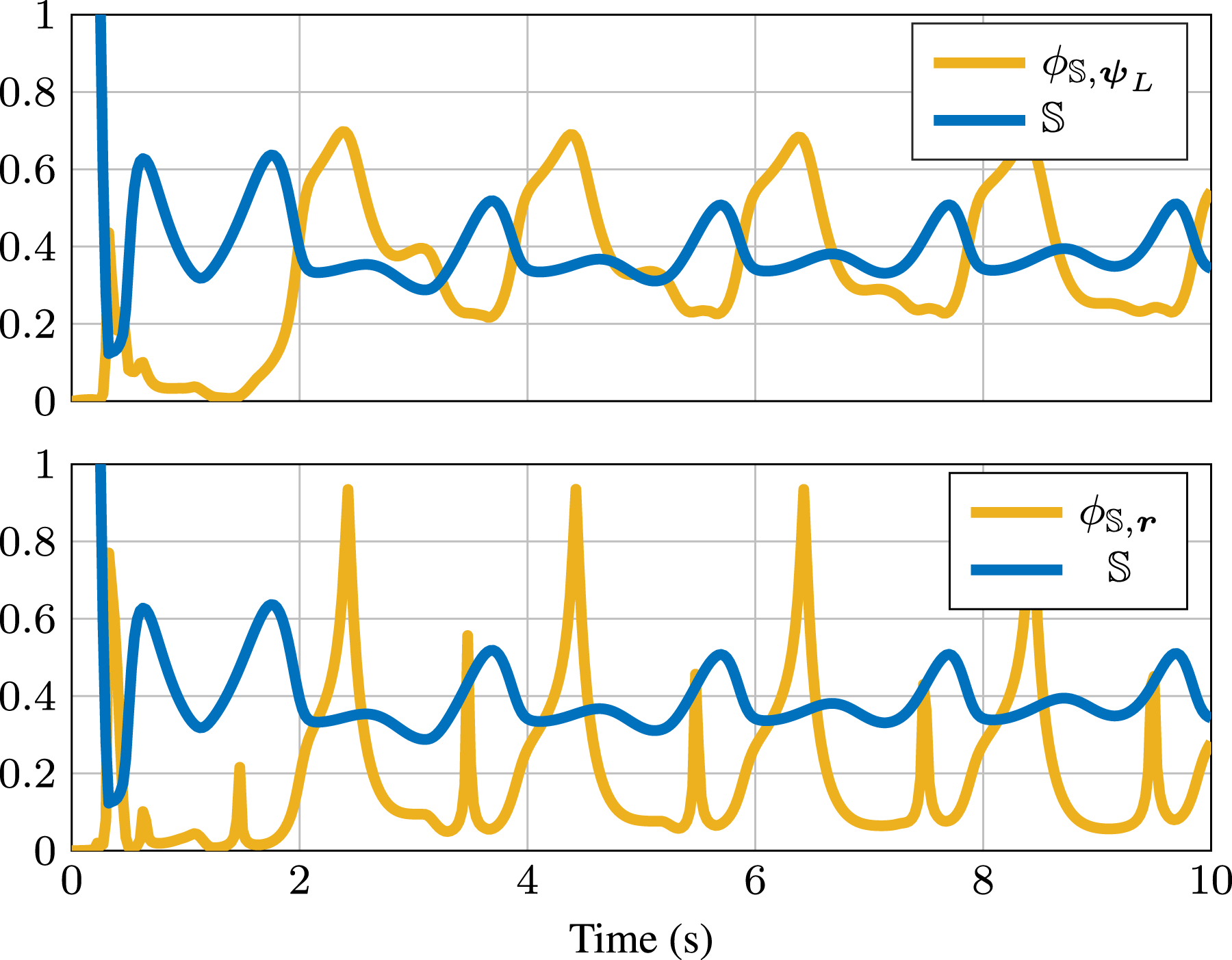
When using the weighted damped least squares approach for redundancy resolution, there are several interacting variables (damping, joint limit avoidance, tracking, and instability avoidance) which interact in a nonlinear manner. Selecting gains can be challenging and the performance of the algorithm can be sensitive to these gain selections. There was one analysis tool that proved particularly useful towards selecting these gains. If we define the 6 × 6 inverted matrix from (6) as (Top) 

3.1.5. Effect of Stability Threshold
We explored the effect of the stability threshold (Top) The stability metric 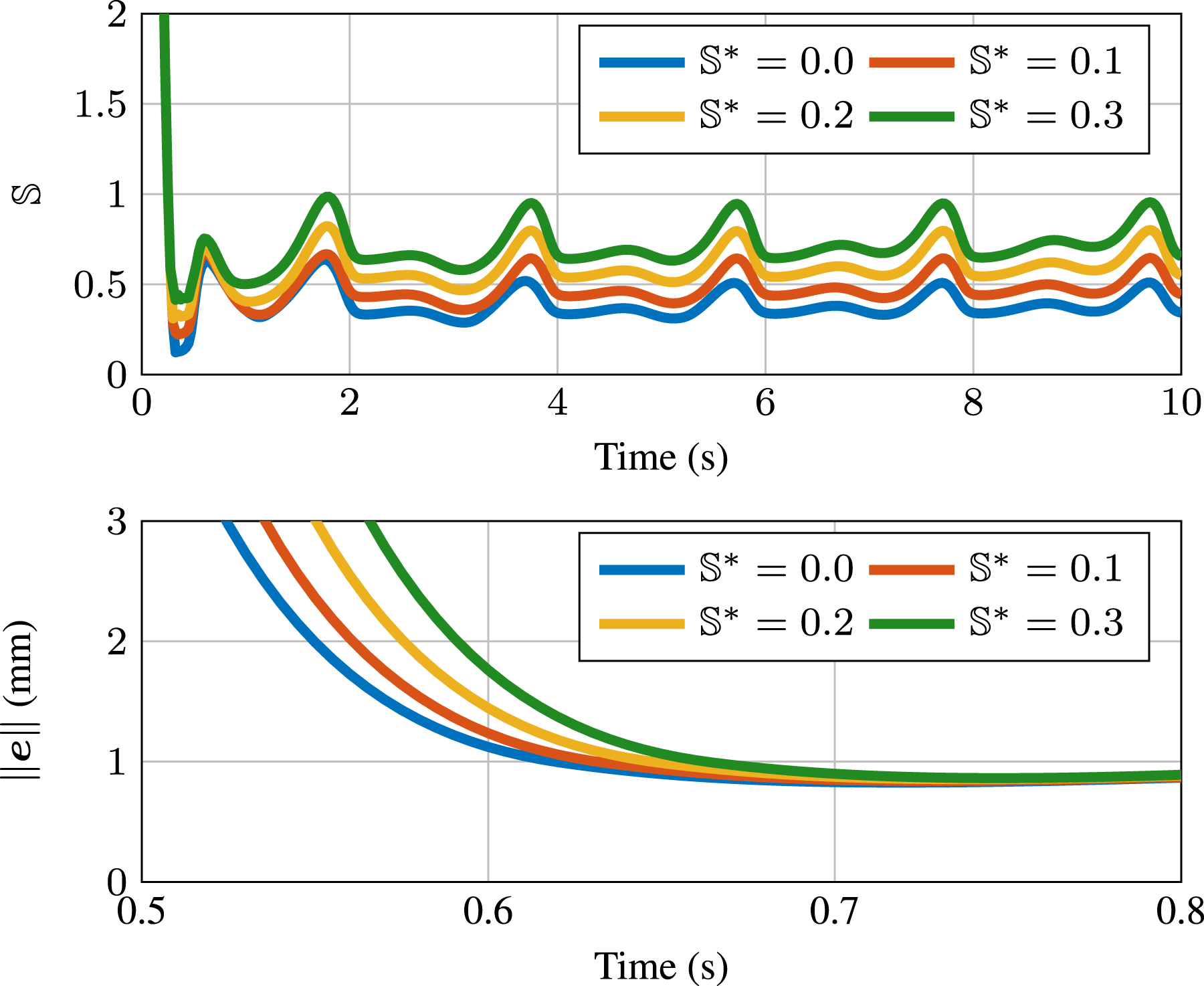
3.2. Stiffness tuning simulations
To test our stiffness tuning redundancy resolution algorithm, we simulated the real-time control of a three-tube concentric tube robot. For this simulation, we used tubes of the same dimensions as Table 3 with curvatures of 10, 12, and 22 m−1 for tubes 1, 2, and 3, respectively.
3.2.1 Stiffness tuning with trajectory following
First, we optimized σ
(Top) Trajectories of the compliance metric σ

It is likely this difference in compliance would be apparent to a surgeon. It has been shown that the peak forces during minimally invasive surgery are around 2 N for suturing skin, around 1 N for suturing muscle, and typically less than 0.5 N for suturing liver tissue (Peirs et al. 2004). The forces during other tissue interactions (i.e. not driving needles) are typically much less than these. As a specific example of the potential utility of this control law, consider a 0.5 N force on the tip of the concentric tube manipulator investigated here. In maximum compliance mode, this could generate a deflection of up to 20 mm, and in minimum compliance mode, this would generate a deflection as small as 5 mm. This could very well be the difference between being able to drive the needle and not drive the needle.
3.2.2. Stiffness tuning with position regulation
Next, we sought to maximize or minimize σ
These plots show the manipulator tracking a single point at all times. Every 10 seconds, the system switches between maximizing and minimizing the compliance metric. Notice that the inner tube extends and the outer tube retracts to maximize compliance, and the opposite happens to minimize compliance. The tracking error (not shown) goes below 0.1 mm in 0.5 s and remains there.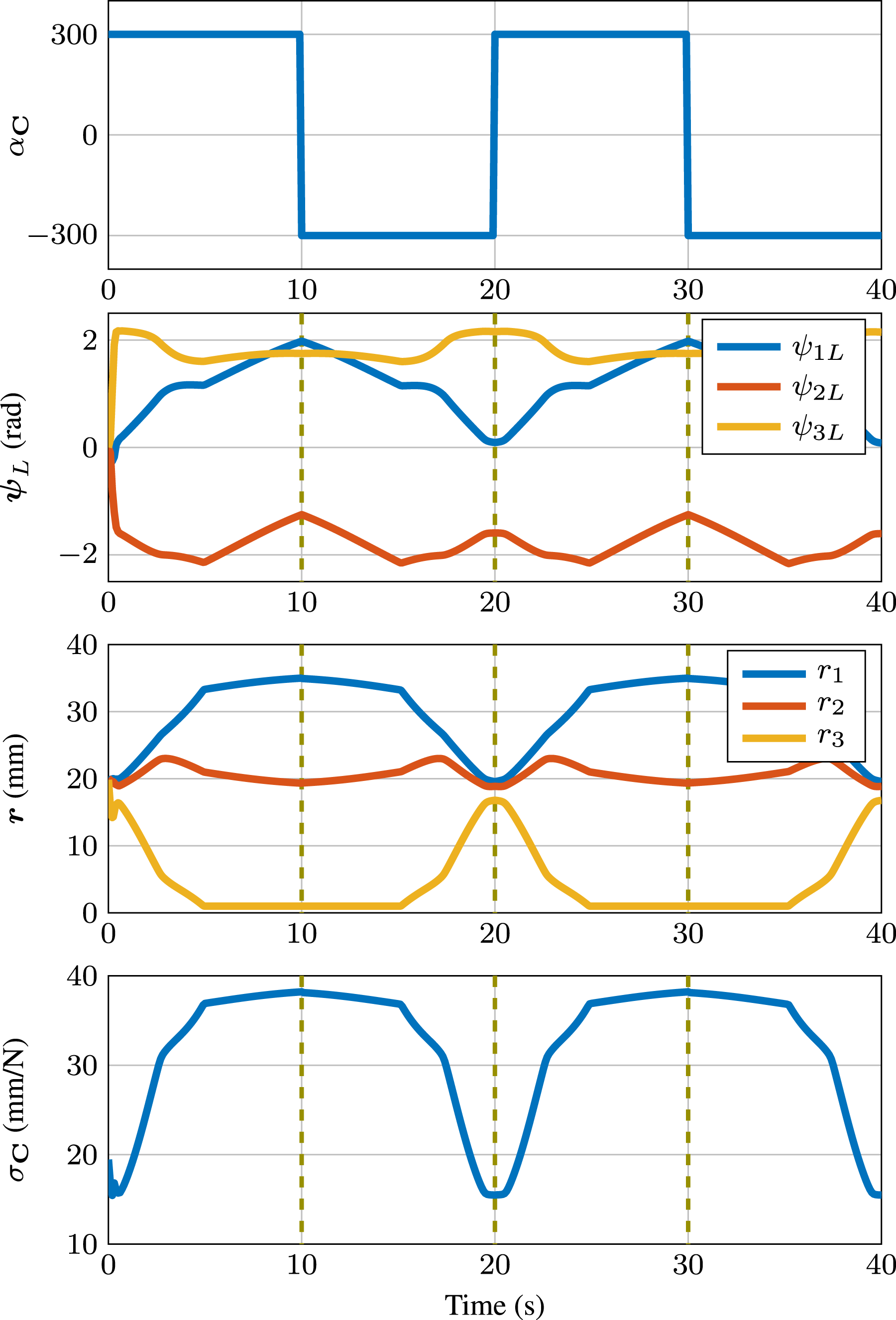
The second and third panels of Figure 9 show the configuration variable paths that move the robot from compliant configurations to stiff configurations, and vice versa. The translational joint values shown in the third panel make intuitive sense: when maximizing σ
4. Experiments
After exploring the ability of the controller to avoid instabilities and tune stiffness in simulation, we conducted experiments to verify performance on physical hardware. This is an important contribution of this paper, since previous investigations of controllers including stability metrics have been solely in simulation.
4.1. Instability avoidance experiments
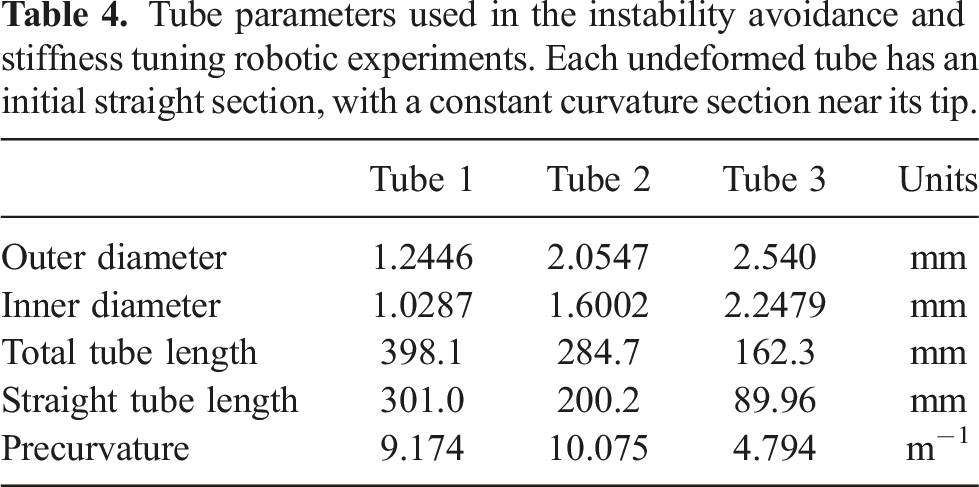
Tube parameters used in the instability avoidance and stiffness tuning robotic experiments. Each undeformed tube has an initial straight section, with a constant curvature section near its tip.
For both experiments, we used the robotic setup shown in Figure 10. The desired joint velocities are calculated in (6) at each time step of the trajectory following or teleoperation process. The joint values are converted to motor position commands and sent to the six motors that rotate the tubes and translate the tubes along linear slides. Further information on the design and use of this robot can be found in (Burgner et al. 2014; Swaney et al. 2015; Wirz et al. 2015). Experimental setup. A magnetic tracking coil was embedded in the tip of the three-tube concentric tube manipulator, which was tracked by the magnetic field generator (Aurora, Northern Digital, Inc.).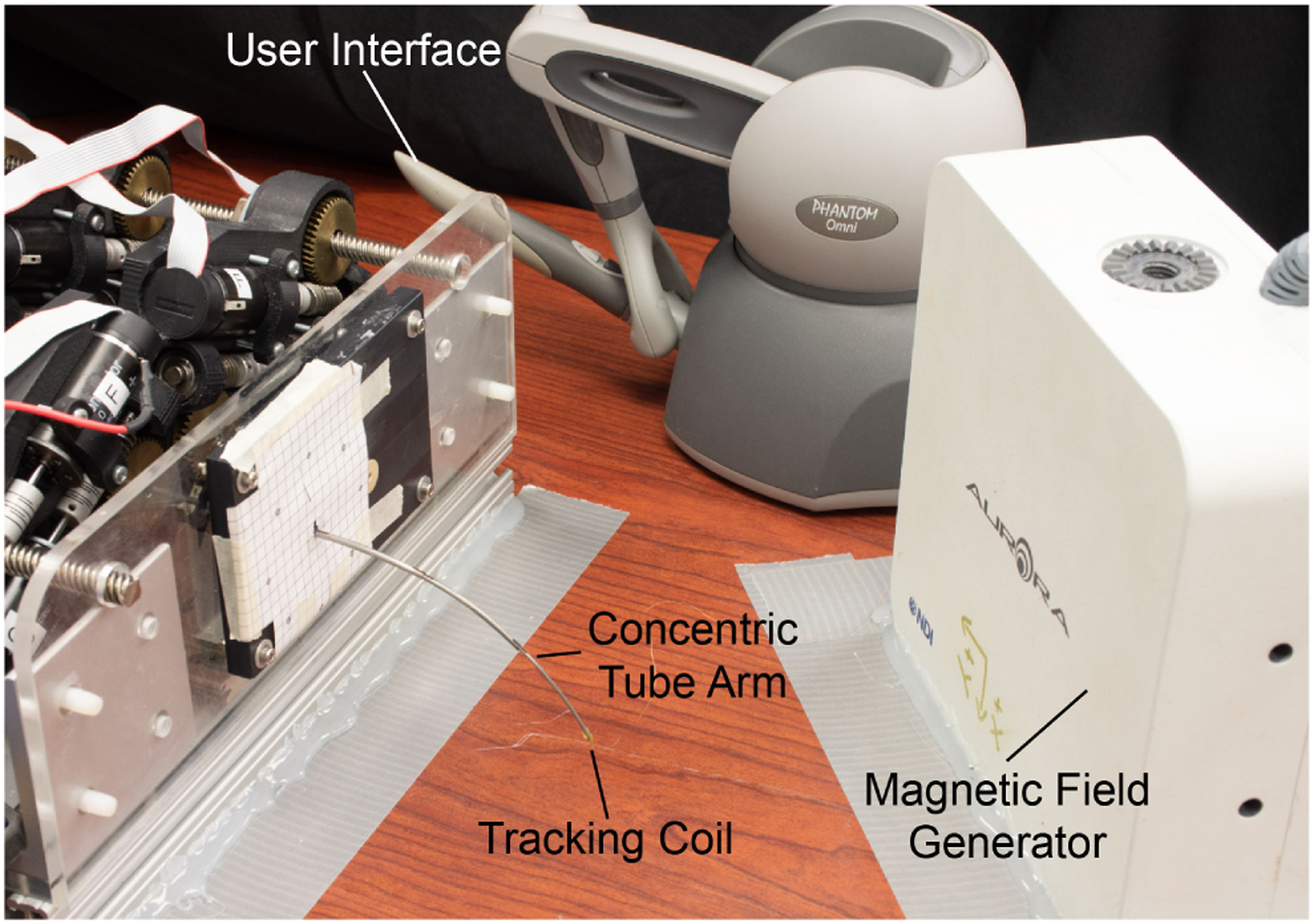
Throughout the experiments, the tip position of the robot was tracked using an electromagnetic tracking coil (Aurora, Northern Digital, Inc.) inserted into the inner tube. The tracker data was used for recording purposes only and was not fed back into the controller (i.e., the controller described in this paper is open loop with respect to the measured tip position). We set the joint limit r1, min = 10 mm to ensure that the tracking coil was not accidentally dislodged from the inner tube during operation.
After shape-setting the tube curvatures using the procedure described in (Gilbert and Webster III 2016), we measured the resulting curvatures and tube lengths (see Table 4). We then performed a calibration process to register the base pose of the robot (i.e., the exit point s = 0 from the base plate shown in Figure 2) to the tracker frame. We moved the robot joints to 82 configurations and recorded the actuator vectors
4.1.1. Trajectory following experiment
We had the robot follow a helix trajectory similar to the simulations described in Sec. 3.1.1, with the parameters R = 28 mm, r = 12 mm, N
T
= 2, and z
off
= 110 mm, and a total time of 50 sec. We completed the trajectory 3 times with and without the instability avoidance control law. For each trial, the robot began at the home configuration
During the experiments, the magnetic tracker recorded data at a rate of 40 Hz, and the robot positions were set to update at a loop rate of 125 Hz. The tracking output produced approximately 2000 data points. The tracking output was then transformed from the tracker frame to the robot’s base frame using the calibrated transformation between the two frames. Taking the Euclidean norm between the desired trajectory and sensor data provides the trajectory following error at each time step.
As seen in Figure 11(b), the robot did not snap when using the instability avoidance control law. However, without the control law (Figure 11(a)), the robot exhibited poor tracking and snapped. Snap points are marked with yellow diamonds and the post-snap position is at the tips of the black arrows. Results of this experiment can also be seen in Extension 1 (Table 5). These plots show the spatial results of the trajectory following experiment in three planar views (N = 3 trials for each controller). The blue curve is the desired trajectory. (a) Without awareness of elastic stability, the robot snapped while attempting to follow the trajectory. The snapping points are marked with yellow diamonds and the post-snap position is at the tip of the black arrow. (b) With instability avoidance, the robot tracked the trajectory and remained stable.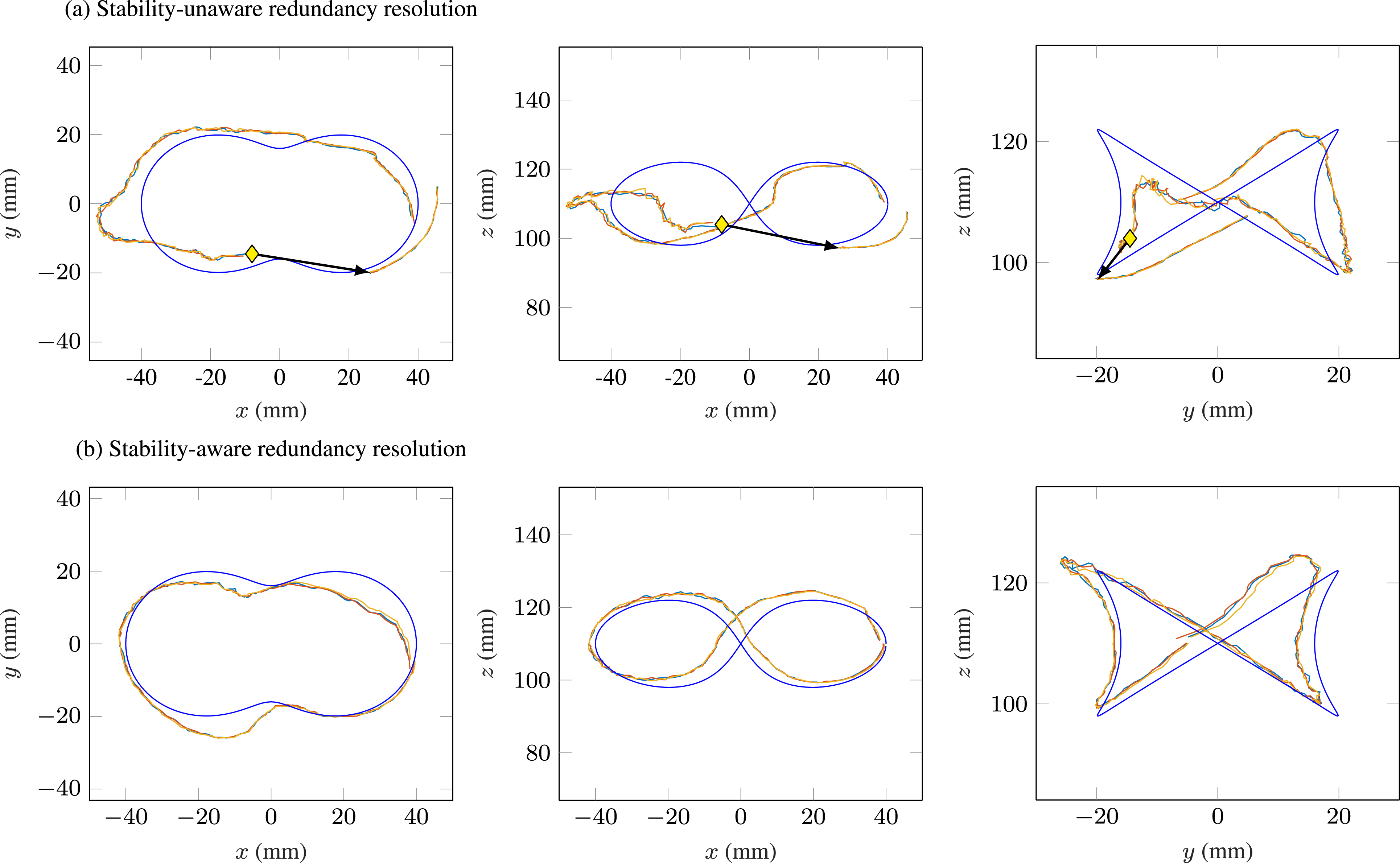
The tracking errors are shown in time in Figure 12. We performed these experiments with a stability threshold Trajectory following tracking error and normalized error with (a) the stability-unaware controller and (b) the stability-aware controller. Without instability avoidance, the robot underwent an uncontrolled snap. With instability avoidance, the robot both tracked the trajectory and remained stable. The error is shown in blue, and the normalized error is shown in red, while the mean error and mean normalized error are shown with horizontal dashed lines of the same colors.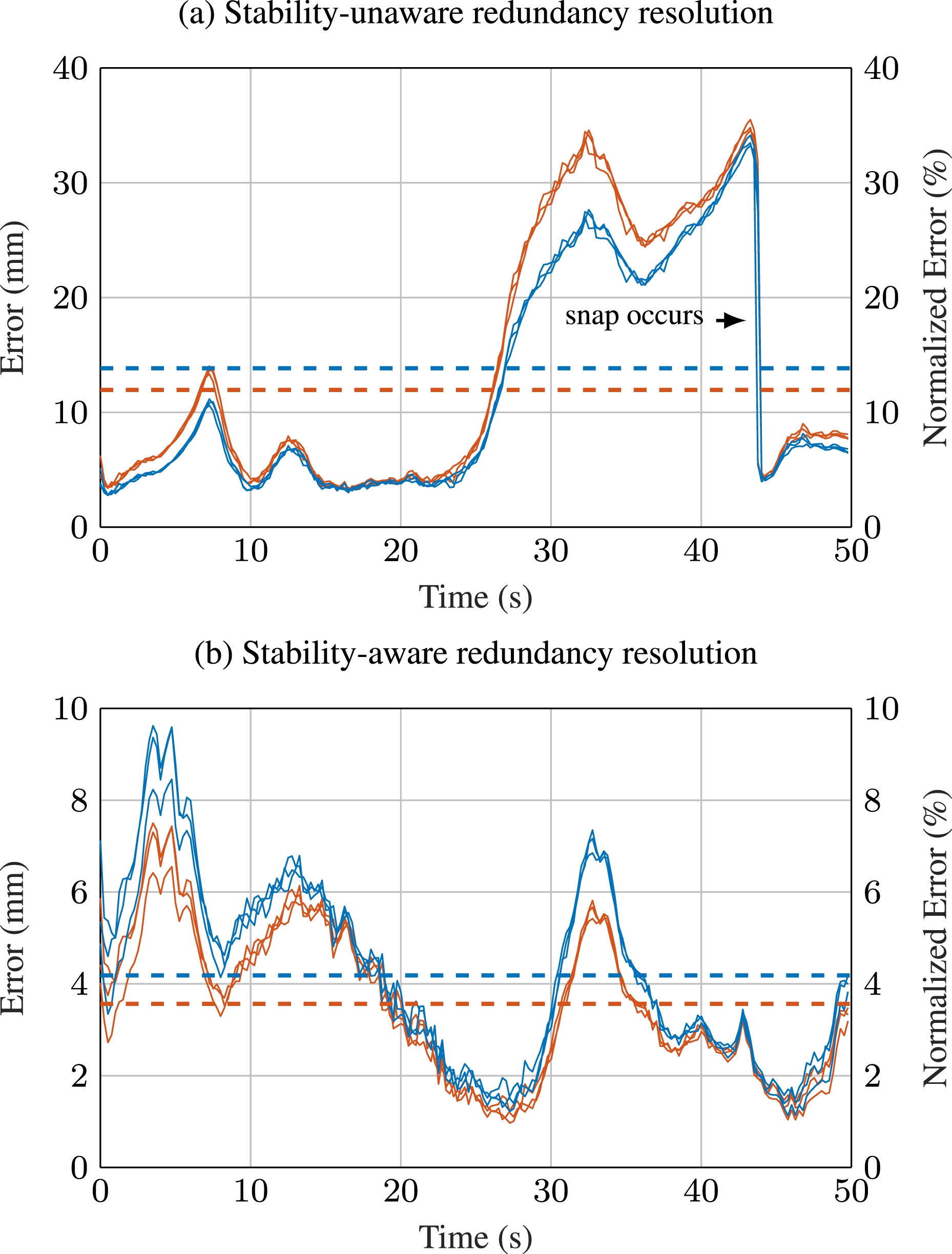
Note that these levels of error are excellent considering the intrinsic error in concentric tube robot models. The standard kinematic model for concentric tube robots does not include effects such as friction, tube clearances, and nonlinear material properties. Experimental evaluations of the model report errors of 1.5–3.0% (Rucker et al. 2010) and 2.1% (Dupont et al. 2010) of robot arclength. Thus, our results of 3.56±1.58% of arclength represent very good tracking.
It is interesting to note that a simulation of this experiment reveals that the stability measure goes below zero twice when not using instability avoidance, but only one snap occurred during the experimental trials. This is to be expected based on the experiments in (Gilbert et al. 2016b), which show the stability measure to be generally conservative, that is, the physical robot generally snaps at a relative angle greater than that predicted by the model due to unmodeled frictional effects.
4.1.2. Teleoperation experiment
Applying redundancy resolution methods to concentric tube robots to avoid elastic instabilities is motivated by the need for stable control without the significant computational overhead or a priori knowledge necessary for path planning. While the trajectory following experiment described above is not “pre-planned” (in the sense that the controller gets a new desired task space velocity at each time step and calculates a joint space velocity based only on that time step, without knowledge of the entire trajectory), it is still worthwhile to validate the algorithm’s performance in a teleoperated scenario with a user in the loop and no prescribed trajectory.
The user was instructed to control the tip position of the robot to explore the robot’s workspace. This was conducted with and without the instability avoidance control law. The user controlled the robot using a 3D Systems Touch haptic device. The user’s commanded tip position was compared to the previous position to compute the desired task space velocity
Figure 13 shows all points that the robot can reach in stable configurations (blue) overlaid with all points that if reached would be unstable (red). Note that there is overlap between the two due to the robot’s redundancy—many points can be reached in both stable and unstable configurations. The user’s teleoperated position time history is overlaid using a black line. With instability avoidance turned off, the user experienced several uncontrolled snaps while moving the manipulator. These snapping points are marked with yellow diamonds in Figure 13. Results of this experiment can also be seen in Extension 2 (Table 5). Results of the teleoperation redundancy resolution experiment without instability avoidance (left) and with instability avoidance (right). In both cases, the tracked tip data is projected into the (R, z) plane describing the robot’s workspace, where 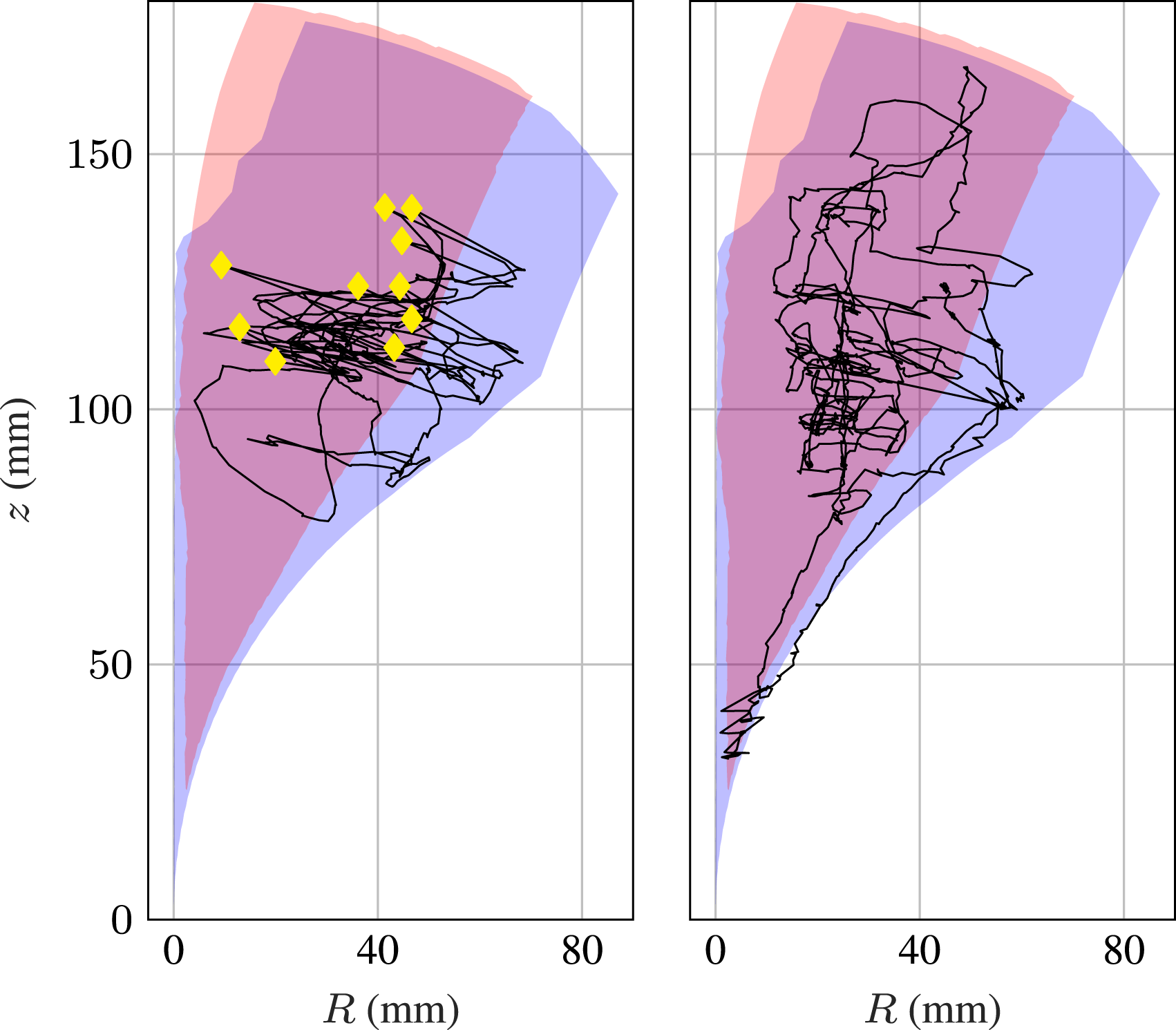
This experiment demonstrates the importance of using the stability metric for redundancy resolution in a real-time control scenario on a prototype with highly curved tubes. Without the elastic stability-aware algorithm, the robot cannot be reliably teleoperated throughout much of its workspace.
4.2. Stiffness tuning experimental validation
To validate the stiffness tuning approach, we measured the tip deflection of a three-tube concentric tube robot. We used the stiffness tuning control law to first minimize and then maximize the maximum singular value of the compliance matrix σ
The same tube set was used for these experiments as were used in the instability avoidance experiments of Sec. 4.1. The commanded tip position was
To evaluate the tip stiffness of the robot, we hung a 50 g mass approximately 4 mm from the tip of the inner tube (shown in Figure 14). We measured the tip position with and without the applied load using the same electromagnetic tracking system as Section 4.1 in order to assess the position regulation error and the deflection. These measurements were taken at the nominal configuration (α
Experimental setup for the stiffness tuning redundancy resolution experiment. The robot maximized and minimized compliance while regulating tip position. A 50 g mass was hung from the tip of the robot and the resulting deflection was measured with the electromagnetic tracker.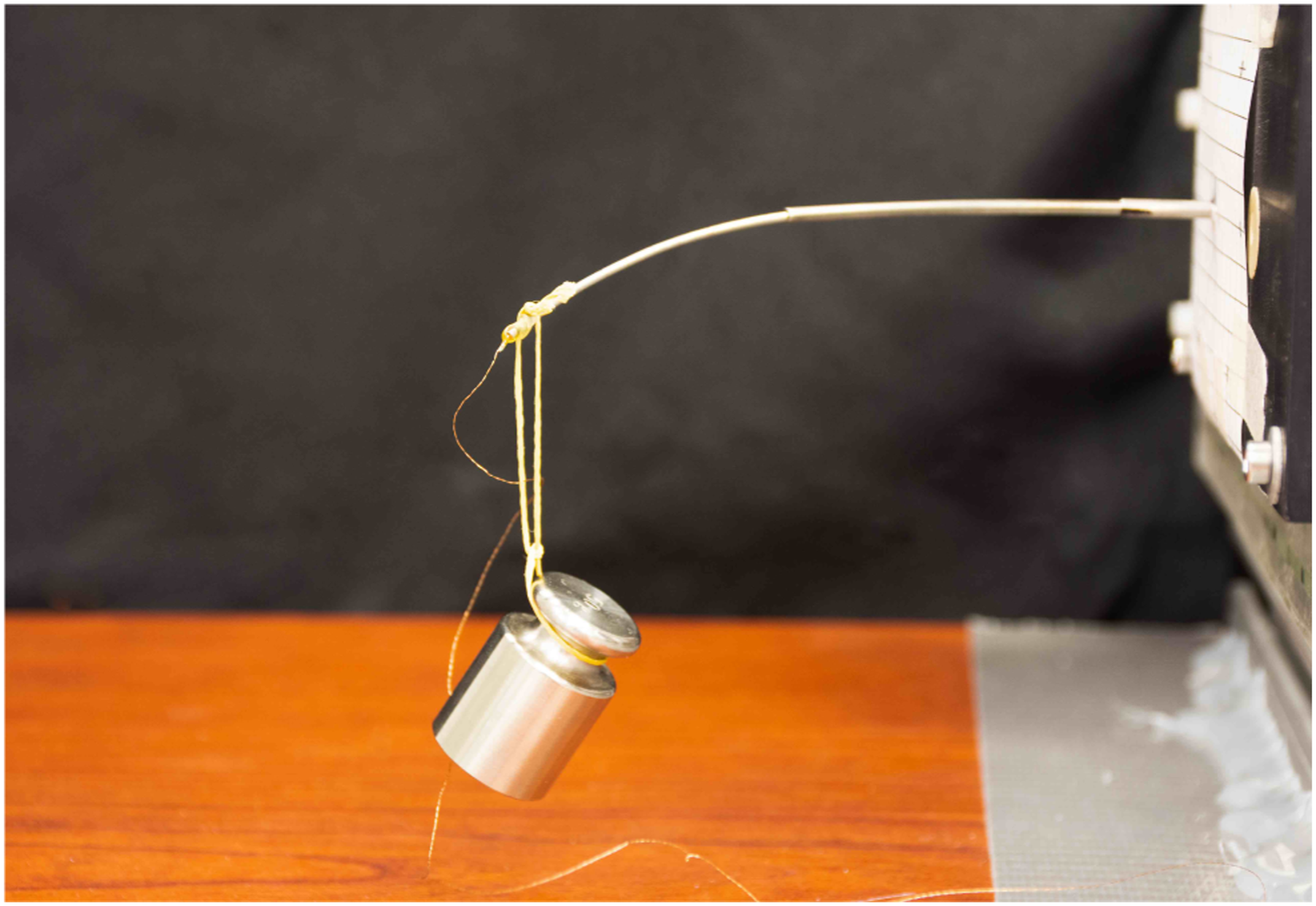
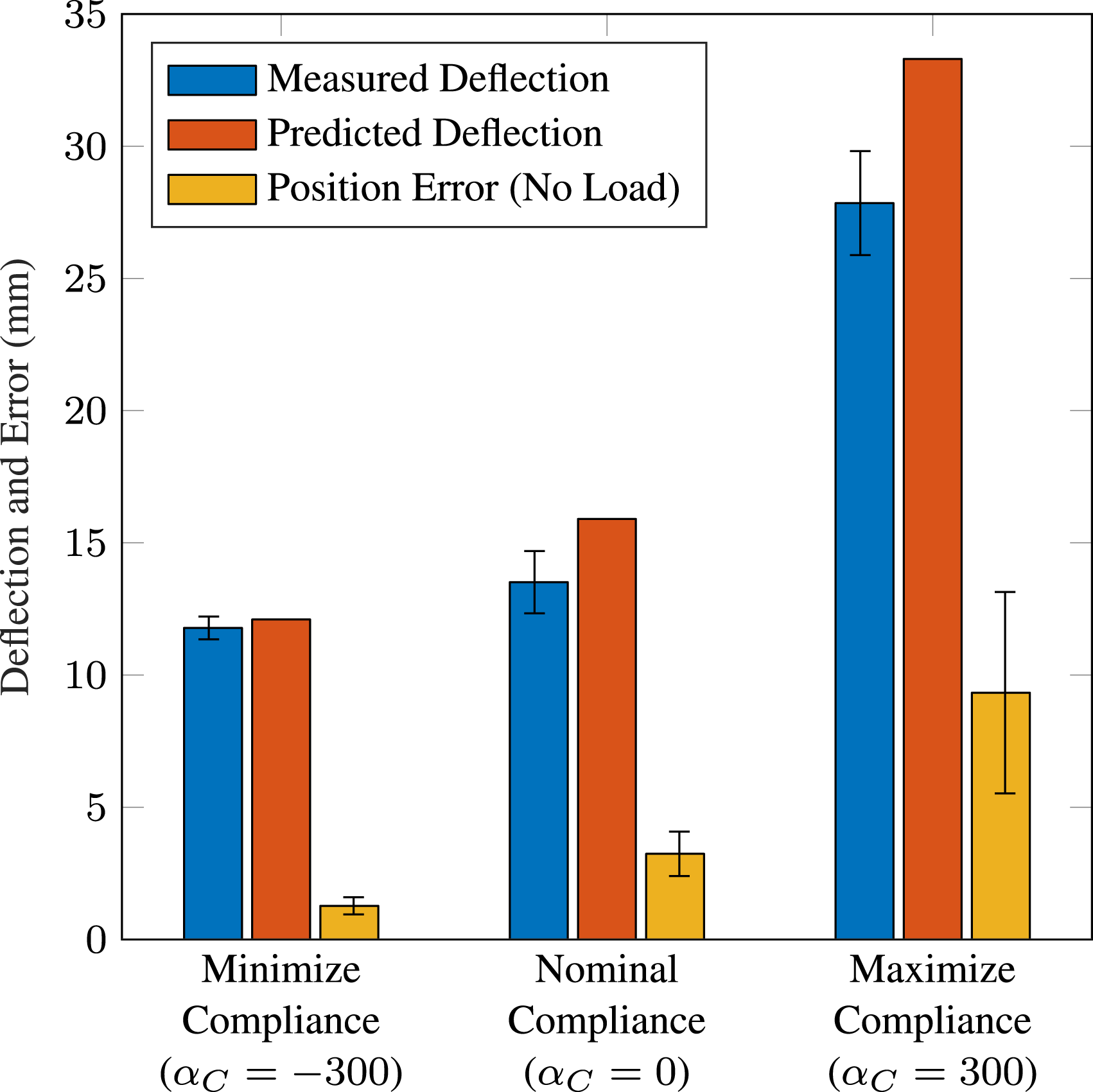
We compared our experimental results to a simulated robot, using the tip regulation simulation described in Section 3.2. The simulated robot achieved a nominal σ
Results of the robotic stiffness tuning experiment (N = 5 trials). When the compliance metric σ
5. Discussion and conclusion
In this paper, we have proposed a redundancy resolution algorithm for concentric tube robots and shown that it can be implemented on robotic hardware. This approach can be employed using real-time resolved rates control, making it suitable for teleoperation, and utilizes new understanding of elastic stability. Use of this control approach makes it possible to use highly curved concentric tube robots that are capable of maneuvering in tight spaces, thus increasing the realistic design space of these robots.
We have also shown that concentric tube robots can resolve redundancy to tune their compliance. This ability could be used to improve the capabilities of these tools in the hands of surgeons and to allow the user to change the properties of their manipulator on the fly. We have demonstrated this capability with simulations and an example experimental configuration. Future work on redundancy resolution stiffness control of concentric tube robots includes further evaluation of the control scheme’s performance with different robot configurations. Different stiffness goals, such as optimizing axial or lateral stiffness, could be explored as well. In addition, it may be worthwhile to perform user studies in which the user can select the desired tip stiffness behavior. Improved designs and stiffness modification may one day combine to enable physicians to perform new kinds of surgical procedures that cannot be attempted today.
Supplemental Material
Supplemental Material
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This material is based upon work supported by the National Institutes of Health under awards R01 EB017467 and NIH-NIBIB training grant T32EB021937, as well as by the National Science Foundation Graduate Research Fellowship Program under Grant No. DGE-1445197. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the NIH, the NIBIB, or the NSF. All authors are with the Department of Mechanical Engineering and the Vanderbilt Institute for Surgery and Engineering at Vanderbilt University, Nashville, TN 37212, USA (e-mail: {patrick.l.anderson, robert.webster}@vanderbilt.edu).
Supplemental Material
Supplemental material for this article is available online.
Appendix
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.