
Abstract
Inspection planning, the task of planning motions for a robot that enable it to inspect a set of points of interest, has applications in domains such as industrial, field, and medical robotics. Inspection planning can be computationally challenging, as the search space over motion plans grows exponentially with the number of points of interest to inspect. We propose a novel method, Incremental Random Inspection-roadmap Search (IRIS), that computes inspection plans whose length and set of successfully inspected points asymptotically converge to those of an optimal inspection plan. IRIS incrementally densifies a motion-planning roadmap using a sampling-based algorithm and performs efficient near-optimal graph search over the resulting roadmap as it is generated. We prove the resulting algorithm is asymptotically optimal under very general assumptions about the robot and the environment. We demonstrate IRIS’s efficacy on a simulated inspection task with a planar five DOF manipulator, on a simulated bridge inspection task with an Unmanned Aerial Vehicle (UAV), and on a medical endoscopic inspection task for a continuum parallel surgical robot in cluttered human anatomy. In all these systems IRIS computes higher-quality inspection plans orders of magnitudes faster than a prior state-of-the-art method.
1. Introduction
In this work, we investigate the problem of inspection planning, or coverage planning (Almadhoun et al., 2016; Galceran and Carreras 2013). Here, we consider the specific setting where we are given a robot equipped with a sensor and a set of points of interest (POI) in the environment to be inspected by the sensor. The problem calls for computing a minimal-length motion plan for the robot that maximizes the number of POI inspected. This problem has a multitude of diverse applications, including surface inspections in industrial production lines (Raffaeli et al., 2013), surveying the ocean floor by autonomous underwater vehicles (Bingham et al., 2010; Gracias et al., 2013; Johnson-Roberson et al., 2010; Tivey et al., 1997), structural inspection of bridges using aerial robots (Bircher et al., 2015, 2016), and medical applications such as inspecting patient anatomy during surgical procedures (Kuntz et al., 2018).
Naïvely computed inspection plans may enable inspection of only a subset of the POI and may require motion plans orders of magnitude longer than an optimal plan, and hence may be undesirable or infeasible due to a robot’s battery capacity or time constraints. In medical applications, physicians may want to maximize the number of POI inspected for diagnostic purposes. Additionally, the procedure should be completed as fast as is safely possible to reduce costs and improve patient outcomes, especially if the patient is under anesthesia during the procedure. For example, a robot assisting in the diagnosis of the cause of a pleural effusion (a serious medical condition that can cause the collapse of a patient’s lung) will need to visually inspect the surface of the collapsed lung and chest wall inside the body in as short a time as possible (see Figure 1(a)). In structural inspecting applications, Unmanned Aerial Vehicles (UAVs), or drones, can be used to efficiently inspect the complex geometry of built structures. High-quality inspection plans could reduce inspection time and reduce costs. Bridge inspection (see Figure 1(b)), for example, is critical to ensuring bridge safety since almost 40% of the bridges in the United States exceed their 50-year design life (ASCE 2016). We note that it may not be possible to inspect some POI due to obstacles in the environment and the kinematic constraints of the robot. Our goal is to compute kinematically feasible collision-free inspection plans that maximize the number of POI inspected, and of the motion plans that inspect those POI we compute a shortest plan. Examples of applications of inspection planning. (a) Inspection planning in human anatomy. Left: The Continuum Reconfigurable Incisionless Surgical Parallel (CRISP) robot (Anderson et al., 2017; Mahoney et al., 2016) is composed of needle-diameter tubes assembled into a parallel structure inside the patient’s body (in which a tube uses a snare system to grip a tube with a camera affixed to its tip) and then robotically manipulated outside the body, allowing for smaller incisions and faster recovery times compared to traditional endoscopic tools (which have larger diameters). Middle: The CRISP robot in simulation inspecting a collapsed lung, a scenario segmented from a CT scan of a real patient with this condition. The visualization shows the robot (orange), the lungs (pink), and the pleural surface visible (green) and not visible (blue) by the robot’s camera sensor in its current configuration. Right: Two example configurations with inspected POI. The CRISP robot (orange) inspects POI (blue) on the organ surface, and visible points are covered by the cone shape (yellow). (b) Inspection planning for bridge structures. A UAV, shown as a blue sphere, inspects points on the surface of a bridge structure. At a configuration, some points are visible (shown in green) while other points are not visible (shown in orange).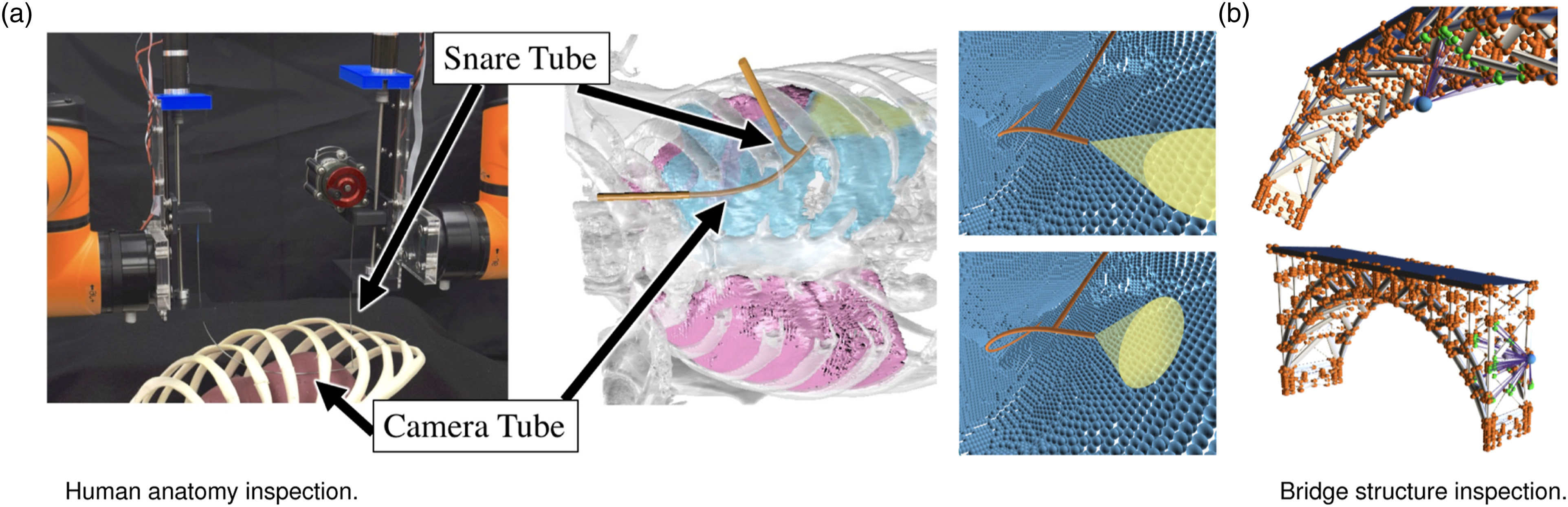
Inspection planning is computationally challenging because the search space is embedded in a high-dimensional configuration space
There are multiple approaches to computing inspection plans. Optimization-based methods locally search over the space of all inspection plans (Bircher et al., 2015; Bogaerts et al., 2018). Decoupled approaches first independently select suitable viewpoints and then determine a visiting sequence, that is, a motion plan for the robot that realizes this sequence (Danner and Kavraki 2000; Englot and Hover 2011). Finally, recent progress in motion planning (Karaman and Frazzoli 2011) has enabled methods to exhaustively search over the space of all motion plans (Bircher et al., 2017; Kafka et al., 2016; Papadopoulos et al., 2013) thus guaranteeing asymptotic optimality, an important feature in many applications, including medical ones. Roughly speaking, asymptotic optimality for inspection planning means these methods produce inspection plans whose length and the number of points inspected will asymptotically converge to those of an optimal inspection plan, given enough planning time.
Of all the aforementioned methods, only algorithms in the latter group provide any formal guarantees on the quality of the solution. This guarantee is achieved by attempting to exhaustively compute the set of Pareto-optimal inspection plans embedded in
To this end, we introduce Incremental Random Inspection-roadmap Search (IRIS), a new asymptotically optimal inspection-planning algorithm. IRIS incrementally constructs a sequence of increasingly dense roadmaps—graphs embedded in Overview of the IRIS algorithmic framework.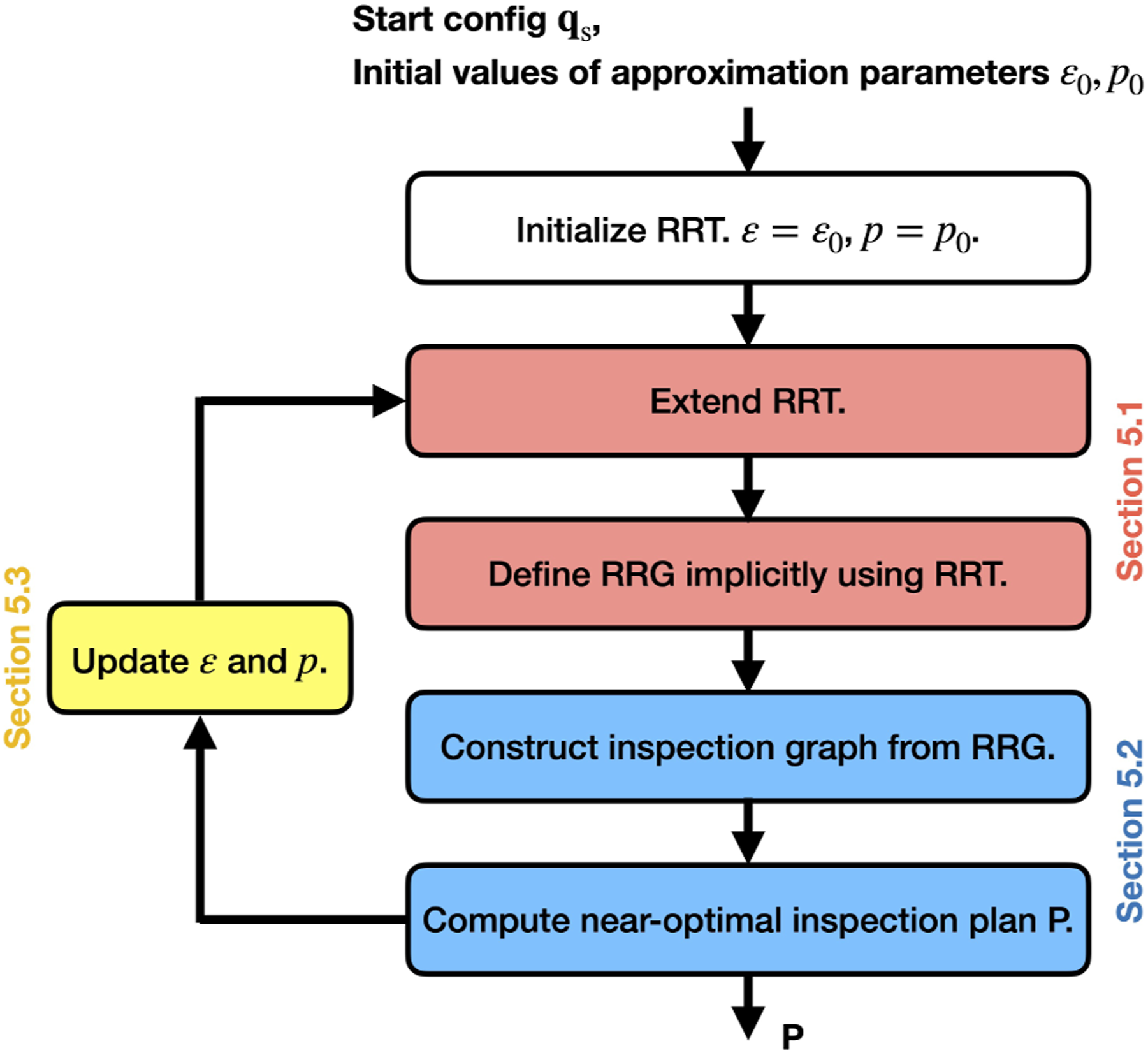
Unfortunately, even the problem of computing an optimal inspection plan on a graph (and not in the continuous space) is computationally hard. To this end, our key insight is to compute a near-optimal inspection plan on each roadmap. Namely, we compute an inspection plan that is at most 1 + ɛ the length of an optimal plan while covering at least p-percent of the number of POI (for any ɛ ≥ 0 and p∈(0,1]). This additional flexibility allows us to improve the quality of our inspection plan in an anytime manner, that is, the algorithm can be stopped at any time and return the best inspection plan found up until that point. We achieve this by incrementally densifying the roadmap and then searching over the densified roadmap for a near-optimal inspection plan—a process that is repeated as time allows. By reducing the approximation factor between iterations, we ensure that our method is asymptotically optimal.
The key contribution of our work is a computationally efficient algorithm to compute provably near-optimal inspection plans on graphs. Coupled with our method for generating this graph, this algorithmic building block enables us to dramatically outperform Rapidly-exploring Random Tree Of Trees (RRTOT) (Bircher et al., 2017)—a state-of-the-art asymptotically optimal inspection planner. Specifically, we demonstrate the efficacy of our approach in simulation for several complex robotic systems (Figure 1), including a continuum robot with complex kinematics—the needle-diameter Continuum Reconfigurable Incisionless Surgical Parallel (CRISP) robot (Anderson et al., 2017; Mahoney et al., 2016), working in a medically inspired setting involving the diagnosis of a pleural effusion.
In this paper, we are providing a refined version of our results in Fu et al. (2019), and two important extensions. First, we show results for a simulated bridge inspection task with a UAV, where the inspection target has a complex structure and the underlying roadmap to compute a near-optimal inspection plan on is much larger (e.g., having more nodes and edges). Second, we prove that IRIS is asymptotically optimal under very general system and environment assumptions. These extensions show that IRIS can be used for general complex-structure inspection while providing provable guarantees.
2. Related Work
2.1. Sampling-based motion planning
Motion planning algorithms aim to compute a collision-free motion for a robot to accomplish a task in an environment cluttered with obstacles (Halperin et al., 2018; LaValle 2006; Lynch and Park 2017). A common approach to motion planning is by sampling-based algorithms that construct a roadmap. Examples include the Probabilistic Roadmaps (PRMs) (Kavraki et al., 1996) (often for solving multiple queries) and the Rapidly-exploring Random Trees (RRTs) (LaValle and Kuffner 2001) for solving single queries. These methods, and many variations thereof, are probabilistically complete—namely, the likelihood that they will find a solution, if one exists, approaches certainty as computation time increases.
Recent variations of these methods, such as PRM* and RRT* (Karaman and Frazzoli 2011), improve upon this guarantee by exhibiting asymptotic optimality—namely, that the quality of the solution obtained, given some cost function, approaches the global optimum as computation increases. Roughly speaking, this is achieved by increasing the (potential) edge set of roadmap vertices considered as its size increases (Karaman and Frazzoli 2011; Solovey et al., 2018). One such algorithm is the Rapidly-exploring Random Graphs (RRGs) (Karaman and Frazzoli 2011) which will be used in our work. RRG combines the exploration strategy of RRT with an updated connection strategy that allows for cycles in the roadmap. It requires solving the two-point boundary value problem (LaValle 2006), which is only efficiently solvable for some robotic systems (including ours).
Guaranteeing asymptotic optimality can come with a heavy computational cost. This inspired work on planners that trade asymptotic optimality guarantees with asymptotic near optimality (e.g., Li et al. (2016); Marble and Bekris (2011); Salzman and Halperin (2016)). Asymptotic near optimality states that given an approximation factor ɛ ≥ 0, the solution obtained converges to within a factor of (1 + ɛ) of the optimal solution with probability one, as the number of samples tends to infinity. Relaxing optimality to near optimality allows a method to improve the practical convergence rate while maintaining desired theoretic guarantees on the quality of the solution.
2.2. Inspection planning
Many inspection-planning algorithms, or coverage planners, decompose the region containing the POI into multiple sub-regions and then solve each sub-region separately (Galceran and Carreras 2013). These methods have limitations, however, such as when occlusions play a significant role in the inspection (Englot and Hover 2012), or when kinematic constraints must be considered (Edelkamp et al., 2017).
Other approaches simultaneously consider all POI. One approach decouples the problem into the coverage sampling problem (CSP) and the multi-goal planning problem (MPP), and solves each independently (Bircher et al., 2015; Danner and Kavraki 2000; Edelkamp et al., 2017; Englot and Hover, 2011, 2012). In CSP, a minimal set of viewpoints that provide full inspection coverage is computed. In MPP, a shortest tour that connects all the viewpoints is computed. These correspond to solving the art gallery problem and the traveling salesman problem, respectively. Several of these variants have been shown to be probabilistically complete (Englot and Hover 2012), but none provide guarantees on the quality of the final solution.
The set of viewpoints and the inspection plan itself can also be generated simultaneously. Papadopoulos et al. (2013) propose the Random Inspection Tree Algorithm (RITA). RITA takes into account the differential constraints of the robot and computes both target points for inspection and the trajectory to visit the targets simultaneously. Bircher et al. (2017) propose Rapidly-exploring Random Tree Of Trees (RRTOT) which constructs a meta–tree structure consisting of multiple RRT* trees. Both methods, which were shown to be asymptotically optimal, iteratively generate a tree, in which the inspection plan is enforced to be a plan from the root to a leaf node. However, each inspection plan does not consider configurations from other branches in the tree which may cause long planning times. This motivates our RRG-based approach.
2.3. Path planning on graphs
Planning a minimal-cost path on a graph is a well-studied problem. When the cost function has an optimal substructure (namely, when subpaths of an optimal path are also optimal), efficient algorithms such as Dijkstra (Dijkstra 1959), A* (Hart et al., 1968), and the many variants thereof can be used. However, in certain settings, including ours, this is not the case. For example, Tsaggouris and Zaroliagis (2004) consider the case where every edge has two attributes (e.g., cost and resource), and the cost function incorporates the attributes in a non-linear fashion.
It is worth mentioning the idea of progressively tightening the approximation factor was also adopted in some anytime A* algorithms based on weighted A* (Pohl 1970), including Anytime Repairing A* (ARA*) by Likhachev et al. (2003) and Restarting Weighted A* (RWA*) by Richter et al. (2010). Anytime Nonparametric A* (ANA*) by van Den Berg et al. (2011) furthermore gets rid of the explicit approximation parameter and performs solution improvement adaptively. Nevertheless, as these methods are based on weighted A*, a prerequisite for good performance is a high-quality heuristic, which is not easy to obtain in the case of inspection planning due to the lack of optimal substructure. Furthermore, these methods focus on static graphs (while in our case the graph is incrementally updated) and consider only a single objective (while in our case we have two objectives, inspection and path length). When looking at multiple objectives (though still considering static graphs), recent work by Zhang et al. (2022) extends the approach presented in this paper to suggest an anytime approximate bi-criteria search algorithm.
Inspection planning also bears resemblance to multi-objective path planning. Here, we are given a set of cost functions and are required to find the set of Pareto-optimal paths (Pardalos et al., 2008). Unfortunately, this set may be exponential in the problem size (Ehrgott and Gandibleux 2000). However, it is possible to compute a fully polynomial-time approximation scheme (FPTAS) for many cases (Tsaggouris and Zaroliagis 2009). For additional results on path planning with multiple objectives or when the cost function does not have an optimal substructure, see for example, (Chen and Nie 2013; Reinhardt and Pisinger 2011; Hernández et al., 2023) and references within.
3. Problem definition
In this section, we formally define the inspection planning problem. The robot operates in a workspace
We assume that the robot is equipped with a sensor
Given a start configuration
4. Method overview
In this section, we provide an overview of IRIS—our algorithmic framework for computing asymptotically optimal inspection plans. A key algorithmic tool in our approach is to cast the continuous inspection planning problem (Sec. 3) to a discrete version of the problem where we only consider a finite number of configurations from which we inspect the POI, and a discrete set of feasible movements between those configurations. The assumption that inspection of POI only happens at vertices is not significantly limiting since a robot’s motion can be approximated by multiple vertices, and many inspection applications require non-zero time to complete a high-quality sensor measurement (e.g., to obtain non-blurry images and high-accuracy lidar scans), which can be effectively encoded at vertices. Thus, we start in Sec. 4.1 by formally defining the graph inspection problem and then continue in Sec. 4.2 to provide an overview of how IRIS builds and uses such graphs. We then describe the method in detail in Sec. 5, and in Sec. 6 show that IRIS’s solution converges to the length and coverage of an optimal inspection path.
4.1. Graph inspection problem
Similar to the (continuous) inspection problem, a graph inspection problem is a tuple
4.2. Overview of IRIS
Our algorithmic framework, depicted in Figure 2, interleaves sampling-based motion planning and graph search. Specifically, we incrementally construct an RRT
The roadmap
As we add vertices and edges to
5. Method
In this section, we detail the different components of IRIS. Sections 5.1 and 5.2 describe how we construct a roadmap and then search it, respectively. After describing in Sec 5.3 how we modify the approximation parameters used by IRIS, we conclude in Sec. 5.4 with implementation details.
5.1. Roadmap construction
We construct a sequence of graphs embedded in
Note that it is not necessary to add only one collision-free configuration in each roadmap update. Adding multiple configurations in one iteration does not hurt the theoretical guarantees while providing us more room to improve an inspection plan in terms of both inspection and path length. There are different possible strategies to balance between roadmap construction and graph search on the roadmap. One example is Fu et al. (2021) where a condition on additional inspection coverage is used to trigger graph searches on the updated roadmap. As the major focus of this paper is to provide a theoretical foundation for the proposed algorithm framework, we only discuss the variant where configurations are added one at a time.
The tree
5.2. Graph inspection planning
We use the RRG described in Sec. 5.1 to define a graph inspection problem, and then compute near-optimal inspection paths over this graph. Before describing how we compute near-optimal inspection paths, we first describe how we compute optimal paths given a graph inspection problem.
5.2.1. Optimal planning
Given a graph inspection problem
Any (possibly non-simple) path P
G
in the original graph G from vs to u can be represented by a corresponding path Computing optimal inspection paths on graphs by casting a graph-inspection problem (bottom) to a graph-search problem (top). Gray layers correspond to the set of all vertices in  ) and the goal set
) and the goal set
We can speed up this naïve algorithm using the notion of dominance, which is used in many shortest-path algorithms (see, e.g., Salzman et al. (2017)). In our context, given two paths P, P′ in our original roadmap
While path domination may prune away paths in the open list of the A* -like search, this algorithm is hardly practical due to the exponential size of the search space (recall that
5.2.2. Near-optimal planning
To perform near-optimal planning, we introduce the idea of approximate dominance. Approximate dominance is a relaxed version of the (strong) dominance mentioned above, characterized by approximation parameters.
Let P, P′ be two paths in
Note that it is possible that both P ɛ, p-dominates P′ and P′ ɛ, p-dominates P. For a visualization of the notions of dominance and the approximate dominance, see Figure 4. Intuitively, approximate dominance allows us to dramatically prune the search space by only considering paths that can significantly improve the quality (either in terms of length or the set of POI inspected) of a given path. When pruning away (strongly) dominated paths, it is clear that they cannot be useful in the future. However, if we prune away approximate-dominated paths, we need to efficiently account for all paths that were pruned away in order to bound the quality of the solution obtained. If we prune away approximate-dominated paths without any special consideration, the “errors” introduced by each domination accumulate. To bound the accumulated “error”, during the search, we need to consistently keep track of “what is the best inspection path if we do not perform approximate dominations that happened so far”? Getting the best inspection paths precisely is equivalent to optimal planning. Thus, we use estimations and name such estimations potentially achievable paths or PAPs.
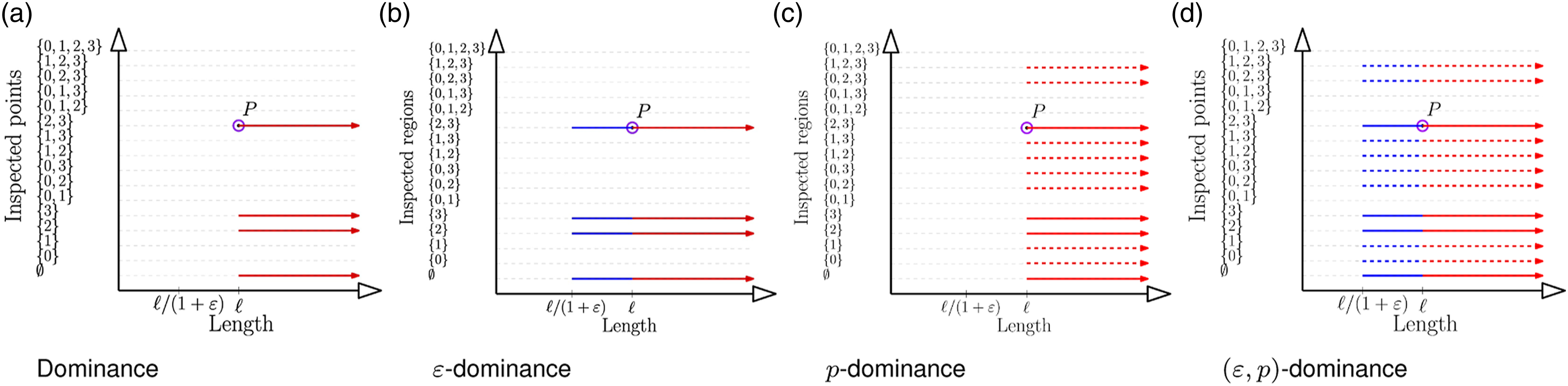
Visualization of the notion of dominating paths by considering a path P from vs to some vertex u as a two-dimensional point
It may seem that a PAP is simply a path but note (as the name PAP suggests) that we do not require that there exists any path P from vs to u such that We now use PAPs to define the notion of a path pair:
Let us define operations on PAPs and on PPs, visualized in Figure 5. The first operation we consider is extending a PAP The second operation is subsuming a path pair by another one which can be thought of as constructing a PAP that dominates the PAPs of both path pairs. Formally, Let We now define the notion of bounding a path pair which will be crucial for ensuring near-optimal solutions:

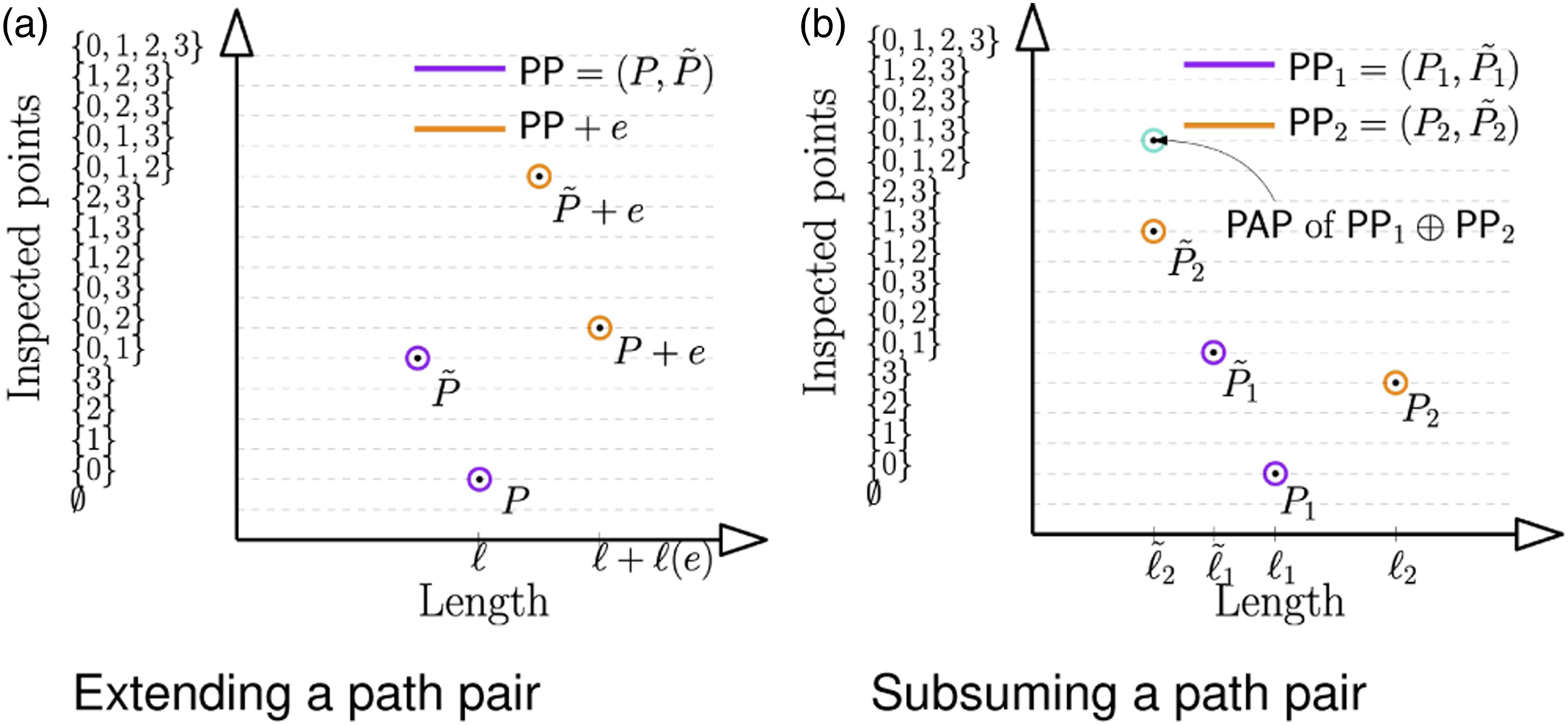
Depiction of operations on path pairs. (a) PP extended by an edge e = (u, v) with
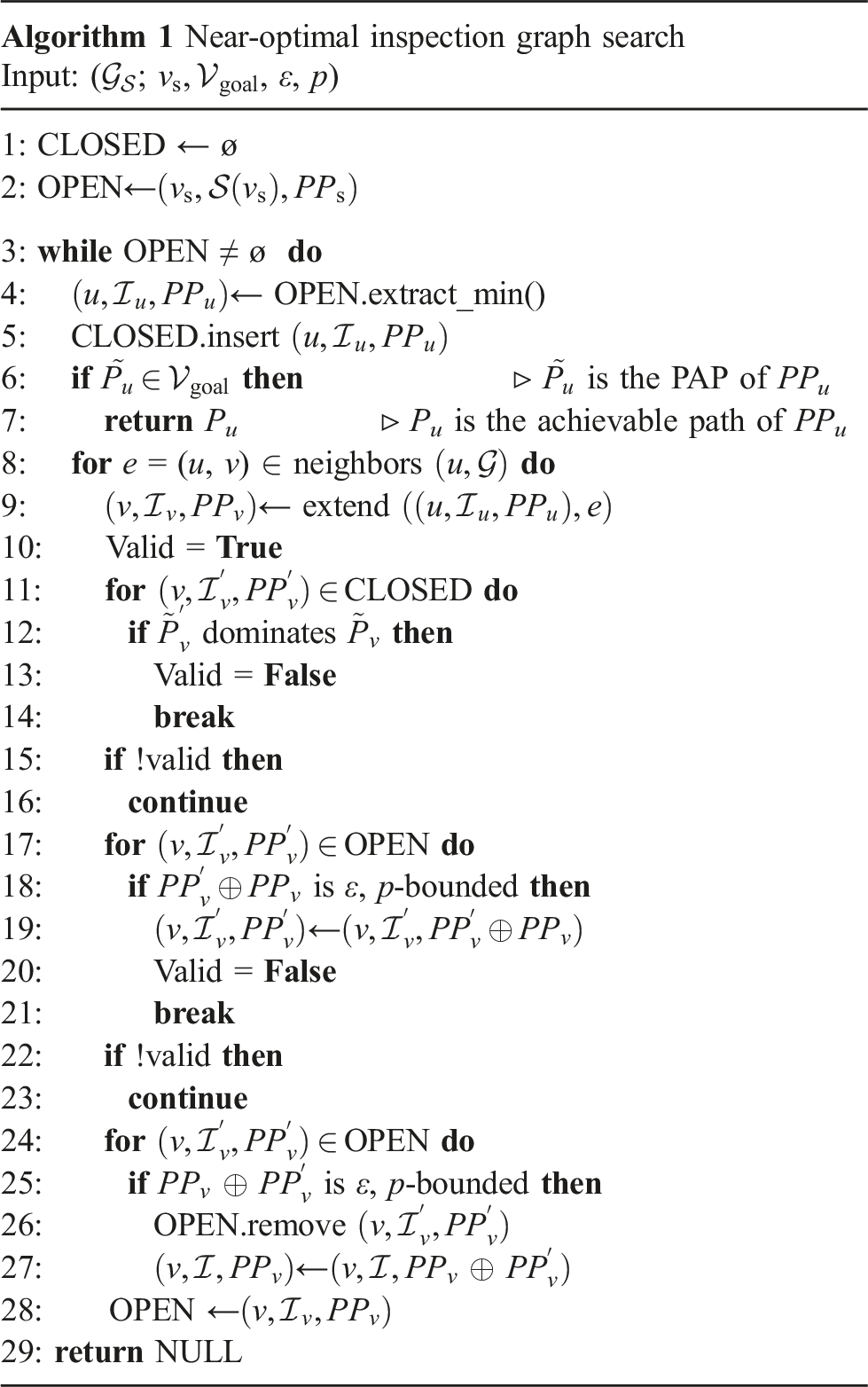
To compute a near-optimal inspection path (Alg. 1 and Figure 6), we extend each path considered by our search algorithm to be a path pair and use this additional data to prune away approximately dominated paths. Similar to A*, our algorithm uses two priority queues OPEN and CLOSED to track the nodes considered by the search. It starts by inserting the start vertex Our algorithm proceeds in a similar fashion to A*—we pop the most promising node At this point, our algorithm deviates from the standard A* algorithm. For each newly created node We prove that, Alg. 1 returns a path that ɛ, p-dominates an optimal inspection path on the roadmap (see Sec. 6).
Visualization of Alg. 1 initialized with ɛ = 2/3 and p = 1/2 (only the relevant parts of the inspection graph are depicted). (a, ) with the trivial PAP of length zero and no points inspected. (a) Two paths (red and blue) are extended from the start node to (b, {0}) and (c, {1}) with path pairs PP1 and PP2, respectively (the PAPs of each path have the same length and coverage as the paths themselves). (b) Blue path extended to (d, {0}) with
5.3. Tightening approximation factors
5.4. Implementation details
5.4.1. Lazy computation in graph inspection planning
We run our search algorithm on
5.4.2. Node extension in graph inspection planning
Any optimal inspection path can be decomposed into a sequence of vertices that improve the coverage of the path called milestones. It is straightforward to see that an optimal inspection path will (i) terminate at a milestone and (ii) connect a pair of milestones via a shortest path in
5.4.3. Heuristic computation in graph inspection planning
Recall that A* orders nodes in the OPEN list according to their computed cost-to-come added to a heuristic estimate of their cost to reach the goal. The heuristic function that we use for vertex . To achieve an inspection coverage of
6. Theoretical guarantees
In this section, we provide theoretical properties showing that IRIS is guaranteed to be asymptotically optimal, given that the system and the environment satisfy several general assumptions. For brevity, we only state the main definitions, lemmas, and theorems and defer all proofs to Appendix A and Appendix B. Recall that IRIS iteratively densifies the roadmap and runs a near-optimal inspection graph search on the latest roadmap. Thus, we begin (Thm. 1) by proving that our graph inspection search algorithm (Alg. 1) returns a near-optimal solution when compared to the optimal solution (available for that specific roadmap). We then continue (Thm. 2) to show that IRIS is asymptotically optimal when the approximation parameters satisfy that
We start by proving that Alg. 1 is near-optimal.

With Lemma 1 and 2, we can show that Alg. 1 returns a near-optimal result.
We now continue to prove that IRIS is asymptotically optimal. To prove this, we show that an optimal inspection path x* can be approximated by a sequence of configurations sampled by IRIS, given certain conditions. Specifically, we will need to show that as the number of iterations approaches infinity, the following requirements hold: (i) the length of the path induced by this sequence of samples converges asymptotically to the length of x*, (ii) the coverage obtained by this sequence of samples converges asymptotically to the coverage of x*, and that (iii) our inspection graph search algorithm finds such a sequence of samples. To do so, we rely on the notion of probabilistic exhaustivity (Schmerling et al., 2015). Roughly speaking, it is the notion that given a sufficiently large set of uniformly sampled configurations, any path can be traced arbitrarily well in the configuration space by a path defined as a sequence of configurations.
In addition, we assume that x* is well-behaved. Roughly speaking, this ensures that there are no singular points along the trajectory where a POI can only be inspected from. This, in turn, will allow us to ensure that trajectories that trace an optimal inspection path cover the same set of POI.



It is not hard to see, that any strongly well-behaved trajectory can be shortened to a weakly well-behaved trajectory without loosing coverage. Thus an optimal inspection trajectory can only be weakly well-behaved. We further require the inspection-planning problem to be regular. The notion of regularity is required because for a weakly well-behaved optimal inspection trajectory 

Similar to many other analyses of sampling-based planning algorithms (see, e.g., Kavraki et al. (1996); Karaman and Frazzoli (2011); Solovey et al. (2018)), we also assume that an optimal trajectory to trace has clearance from
(i) (ii) x0 has strong δcl-clearance. (iii) ∀k∈[0,∞), x
k
is dynamically feasible and has strong δ
k
-clearance for some δ
k
> 0, and (iv) We are finally ready to state our final theorem.
(i) x*(0) = (ii) x* has weak δcl-clearance for some δcl > 0, (iii) x* is weakly ξ-well behaved for some ξ > 0.
Furthermore, let ℓ
i
and 

7. Results
We evaluated IRIS on three simulated scenarios: (1) a planar manipulator inspecting the boundary of a square region (Figure 7(a)), (2) an unmanned aerial vehicle (UAV) inspecting the outer surface of a bridge (Figure 7(b)), and (3) a CRISP robot inspecting the inner surface of a pleural cavity (Figure 7(c)). For all experiments, we order path pairs in OPEN (Alg. 1 line 4) according to the path pair with the minimal potentially achievable path cost. All tests were run on a 3.4 GHz 8-core Intel Xeon E5-1680 CPU with 64 GB of RAM. Simulation scenarios. (a) A 5-link planar manipulator (orange) inspects the boundary of a square region (blue) where rectangular obstacles (red) may block the robot and occlude the sensor. The sensor’s field of view (FOV) is represented by the yellow region. 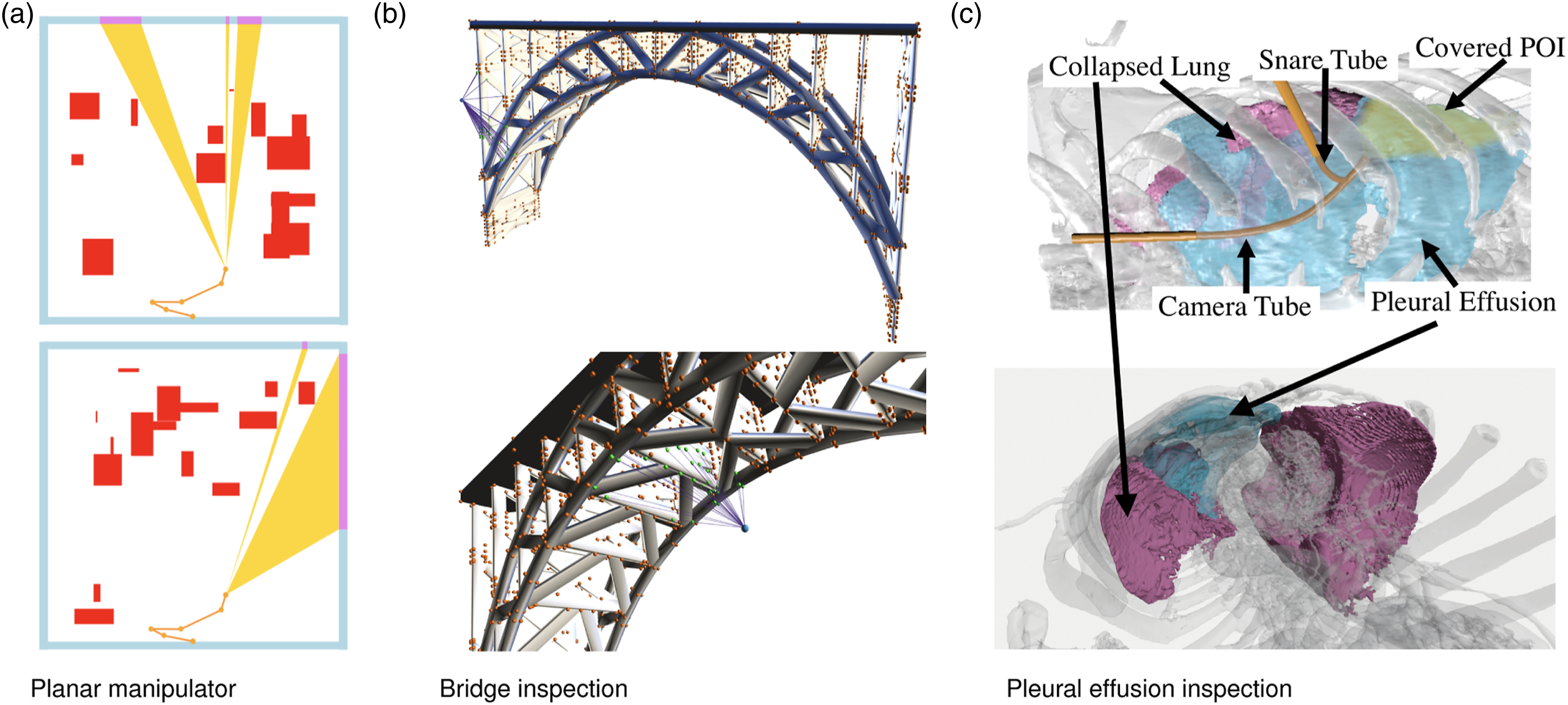
7.1. Planar manipulator scenario
In this scenario, depicted in Figure 7(a), we have a 5-link planar manipulator fixed at its base that is tasked with inspecting the boundary of a rectangular 2D workspace, which is discretized into 400 POI. The sensor is a camera attached to the tip of the manipulator, aligning with the direction of the robot’s final segment. When modeling the camera for inspection, we consider a field of view (FOV) of 45° and an unbounded effective inspecting distance. We start by evaluating IRIS for fixed p and ɛ and then compare it with RRTOT using our approach for dynamically reducing the approximation factors. For every set of parameters, we ran 10 experiments for 1000 s and report the average value together with the standard deviation.
This scenario serves as a simple example where we compare the approximation algorithm for inspection planning with optimal inspection planning (i.e., p = 1, ɛ = 0). When p = 1, indicating we do not allow any approximation on inspection coverage, and we vary ɛ (Figure 8(a)), we can see that even small approximation factors (e.g., ɛ = 0.5) allow to dramatically increase the coverage obtained as each search episode takes less time and more configurations can be added to the RRT tree. While optimal inspection planning (using ɛ = 0) did not result in 80% coverage even after 1000 s, this was achieved within one second for ɛ ≥ 1.0. This comes at the price of slightly longer inspection paths. When ɛ = 0, indicating we do not allow any approximation on path length, and we vary p (Figure 8(b)), we get roughly the same coverage per time but at the price of much longer paths for higher values of p. Quality of inspection paths computed for the planar manipulator. The algorithm falls back to optimal inspection planning when p = 1, ɛ = 0. (a) IRIS running with p = 1, f = 0 and varying values of ɛ. (b) IRIS running with ɛ = 0, f = 0 and varying values of p. (c) Comparison of IRIS and RRTOT. IRIS running with p0 = 0.95, ɛ0 = 20.0, and f = 0.0005.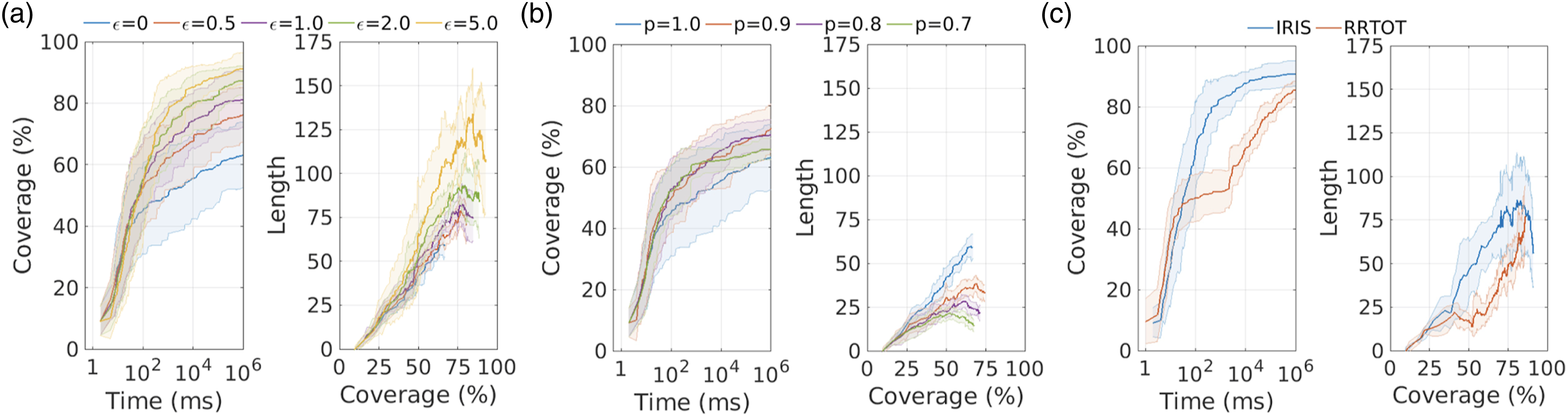
Following the above discussion, when reaching high coverage is the sole objective, one should use large initial values of p0 and ɛ0. When we want initial solutions to also be short, one should start with smaller approximation factors. We compared IRIS with different initial approximation factors to RRTOT (Bircher et al., 2017), see Figure 8(c). We can see that our approach allows producing higher-quality paths than RRTOT. For example, IRIS obtains more than a 264× speedup when compared to RRTOT when producing the same quality of inspection planning for the case of roughly 85% coverage and path length of 85.8 units. Final inspection paths obtained by IRIS are both shorter and inspect larger portions of
7.2. Bridge inspection scenario
In this scenario, depicted in Figures 7(b) and (a) UAV equipped with a camera inspects the surface of a bridge structure. The bridge structure is obtained from a 3D mesh (Elkassar 2008) and discretized into 3817 POI. The bridge structure serves as both an inspection target and an obstacle that may block movements and occlude sensing. And we do not consider other environmental obstacles except for the ground, which means the UAV can only fly above the ground.
The UAV has a configuration space of
We ran IRIS and RRTOT for this scenario 10 different times for 10,000 s (Figure 9). IRIS obtains more than a 8× speedup when compared to RRTOT when producing a better quality of inspection planning for the case of roughly 57% coverage and path length of 230 units, which is only 68% of that of RRTOT. Comparing the quality of inspection paths computed for the bridge inspection scenario. IRIS was run with p0 = 0.7, ɛ0 = 5, and f = 0.0001.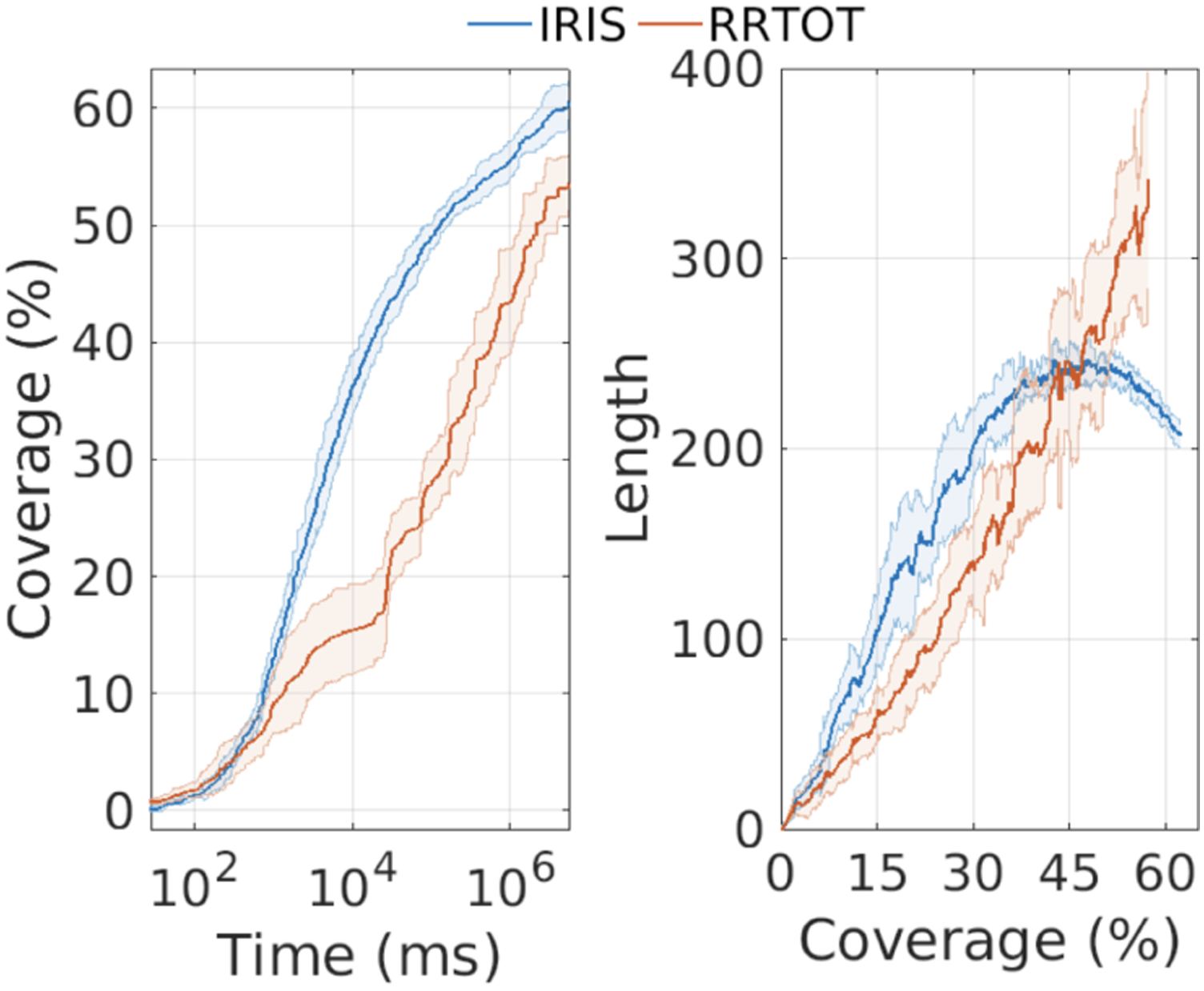
7.3. Pleural effusion inspection scenario
The anatomical pleural effusion environment for this simulation scenario was obtained from a Computed Tomography (CT) scan of a real patient suffering from this condition, and a fine discretization of the internal surface of the pleural cavity is used as the set of POI containing 49506 points. We also use the internal surface of the cavity as obstacles and prohibit the robot from colliding with the pleural surface, lung, and chest wall (except at tube entry points). Pleural effusion volumes can be geometrically complex, as the way in which the lung separates from the chest wall can be inconsistent. This results in unseparated regions of the lung’s surface that can inhibit movement and occlude the sensor from visualizing areas further in the volume.
Here we consider a CRISP robot with two tubes, where a snare tube is grasping a camera tube in order to create a parallel structure made of thin, flexible tubes. Each tube can be independently rotated in three dimensions about its entry point into the body, and independently translated into and out of the cavity. The system has 8 degrees of freedom with a configuration space of
We ran IRIS and RRTOT for this scenario 10 different times for 10,000 s (Figure 10). Similar to the planar manipulator scenario, IRIS allows producing higher-quality paths than RRTOT. For example, IRIS obtains more than a 79× speedup when compared to RRTOT when producing the same quality of inspection planning for the case of roughly 33% coverage and path length of 0.3 units. Comparing the quality of inspection paths computed for the pleural effusion scenario. IRIS was run with p0 = 0.8, ɛ0 = 10, and f = 0.01.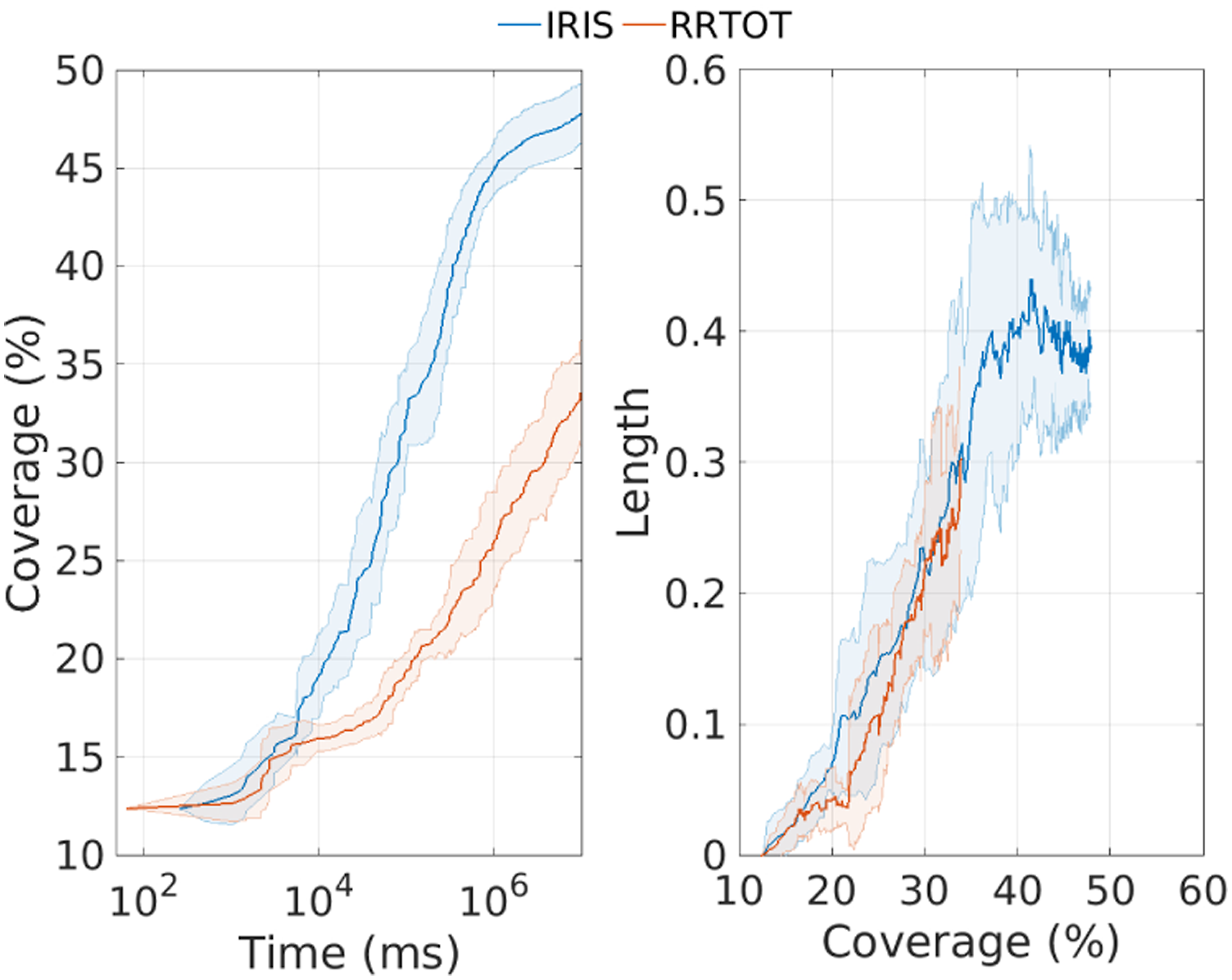
8. Conclusion and future work
In this work, we presented IRIS, an algorithmic framework for computing asymptotically optimal inspection plans. Our key contribution is an algorithm to efficiently compute near-optimal inspection plans on graphs. Interestingly, our problem of graph-inspection planning lies in the intersection between single and bi-criteria shortest path problems. Clearly, we are computing a shortest path on the inspection graph
We showed IRIS outperforms the prior state-of-the-art, including in a medical application in which a surgical robot inspects a tissue surface inside the body as part of a diagnostic procedure. However, the efficiency of IRIS can be further improved. We now highlight several avenues where such improvement could be obtained.
8.1. Dynamic updates in graph inspection planning
IRIS reruns Alg. 1 every iteration which may be highly inefficient as we would like to reuse information constructed from previous search episodes. Indeed, the general case where a graph undergoes a series of edge insertions and edge deletions and we wish to update a shortest-path algorithm is a well-studied problem referred to as the fully dynamic single-source shortest-path problem (Frigioni et al., 2000; Ramalingam and Reps 1996). Efficient algorithms exist even when running an A*-like search (Koenig et al., 2004). Thus, an immediate next step to improve the efficiency of our algorithm is to adapt the aforementioned algorithms to the case of near-optimal graph inspection planning.
8.2. Balancing graph search and lazy computation
Recall that we employ a lazy search paradigm when computing near-optimal inspection plans on the inspection graph (Sec. 5.4). This was done because edge evaluation is computationally complex. However, as the number of iterations increases, the search starts to dominate the overall running time of our algorithm and not edge evaluation (see Figure 11). Recently Mandalika et al. (2018, 2019) presented an algorithm that balances edge evaluation and graph search when edges are expensive to evaluate using the notion of lazy look-ahead. Thus, we suggest using their method dynamically varying the so-called lazy look-ahead—in the initial stages of the algorithm, when the search is not a bottleneck, employ a large look-ahead (which corresponds to performing more search). As the algorithm progress, reduce the look-ahead to account for the fact that edge evaluation is relatively cheaper than graph search. Time decomposition of IRIS as a function of iteration number.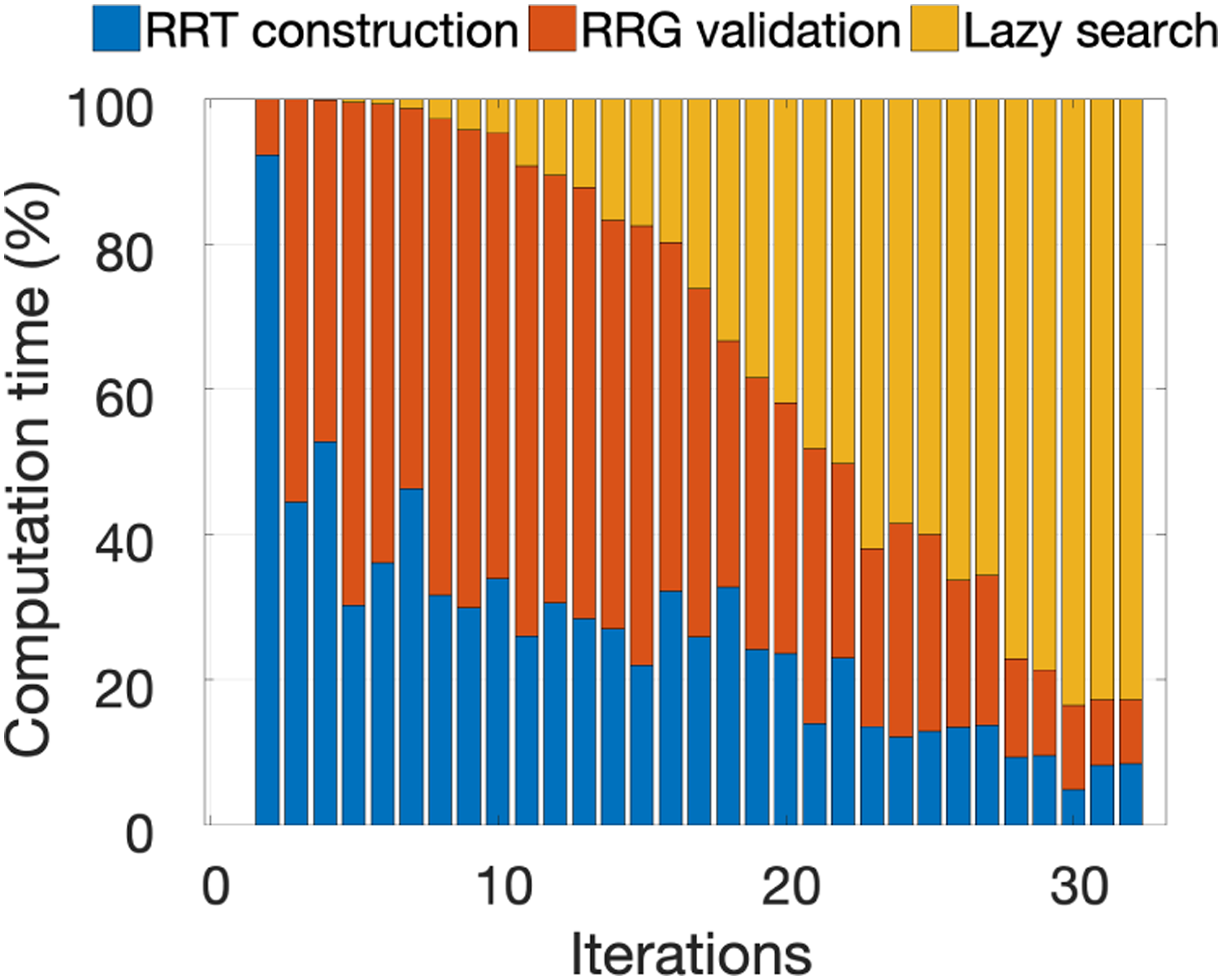
8.3. Efficient sampling of configurations in RRT construction
Recall that in our RRT constructions we sample configurations uniformly at random from . We suspect that the goal bias should be dynamically changed—when the inspection graph
8.4. Employing multiple heuristics in graph inspection planning
As the number of iterations increases, graph search dominates the running time of our algorithm. Heuristics have been shown to be an effective tool in speeding up search algorithms and we suggest employing recent developments from the search community to speed up this part of our framework. One such development is using multiple heuristics to guide the search in a systematic way (Aine et al., 2016) that has shown to be an effective tool in robot planning algorithms (Islam et al., 2018; Ranganeni et al., 2018).
Roughly speaking, using multiple heuristics allows encoding domain knowledge without having to worry about the heuristic functions being admissible. In our setting, we are simultaneously reasoning about inspection coverage and plan length in our graph inspection planning. Thus, it may be beneficial to design one (or more) heuristics that account for path length and one (or more) heuristics that account for path coverage. Then we could apply a method similar to MHA* (Aine et al., 2016) to combine the efforts of these heuristics.
8.5. Adaptively updating approximation parameters
In our work, we used a simplistic approach to update the approximation parameters. These may have a dramatic effect on the quality of plans produced. We suggest further inspecting how to update these parameters, possibly doing this in a dynamic fashion according to information obtained from previous search episodes.
Footnotes
Acknowledgments
The authors gratefully acknowledge Inbar Fried at the University of North Carolina at Chapel Hill for his comments regarding the proofs.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported in part by the National Science Foundation (NSF) [grant numbers 2008475, 2038855]; the Israeli Ministry of Science, Technology and Space (MOST) [grant numbers 3-16079, 3-17385]; and the United States-Israel Binational Science Foundation (BSF) [grant numbers 2019703, 2021643].