
Abstract
Soft continuum manipulators offer levels of compliance and inherent safety that can render them a superior alternative to conventional rigid robots for a variety of tasks, such as medical interventions or human–robot interaction. However, the ability of soft continuum manipulators to compensate for external disturbances needs to be further enhanced to meet the stringent requirements of many practical applications. In this paper, we investigate the control problem for soft continuum manipulators that consist of one inextensible segment of constant section, which bends under the effect of the internal pressure and is subject to unknown disturbances acting in the plane of bending. A rigid-link model of the manipulator with a single input pressure is employed for control purposes and an energy-shaping approach is proposed to derive the control law. A method for the adaptive estimation of disturbances is detailed and a disturbance compensation strategy is proposed. Finally, the effectiveness of the controller is demonstrated with simulations and with experiments on an inextensible soft continuum manipulator that employs pneumatic actuation.
Keywords
1. Introduction
Soft continuum manipulators are devices made of low-stiffness materials, which are typically exploited to achieve large structural deformations and displacements (Rus and Tolley, 2015). Such devices offer many attractive features, including compliance, light weight, inherent safety, and relatively simple miniaturization. These features make them ideally suited for human–robot interaction and for operation in cluttered environments, such as those found in medicine (DeGreef et al., 2009; Gerboni et al., 2017). The development of soft continuum manipulators has received significant attention, particularly in recent years (Burgner-Kahrs et al., 2015; Gerboni et al., 2015; Trivedi et al., 2008; Webster and Jones, 2010; Wehner et al., 2016). Among the different actuation strategies proposed, pressurized fluids, and particularly pneumatics, is one of the most popular. This can be credited to the high power-to-weight ratio, fast response, affordability, compatibility with magnetic resonance imaging (MRI), and miniaturization potential that soft continuum manipulators with pneumatic actuation can offer. A pioneer device in this category is the flexible micro actuator (FMA) (Suzumori, 1996; Suzumori et al., 1991, 1992). Since its invention, multiple other FMA designs have been proposed and developed (e.g. Abe et al., 2007; Chen et al., 2009; Cianchetti et al., 2014; Garriga-Casanovas et al., 2018; Marchese and Rus, 2016; McMahan et al., 2006; Mosadegh et al., 2014; Wehner et al., 2016), as well as torsional soft actuators (Sanan et al., 2014). Despite all this progress on design and manufacturing of FMAs and soft continuum manipulators in general, the study of model-based control strategies specific to these systems remains a largely unexplored field (Thuruthel et al., 2018).
Control strategies for soft continuum manipulators have been proposed in the literature using model-free and model-based methods. Numerical model-free methods have the advantage of not relying on a dynamical model of the system, which can be difficult to derive analytically for general cases or can be prohibitively time consuming if computed numerically. A model-free controller based on an adaptive Kalman filter was recently proposed by Li et al. (2018), while machine learning techniques were employed by Rolf and Steil (2014) and Thuruthel et al. (2017) to construct inverse kinematic models for control purposes. A common drawback of machine learning approaches is the need for training data, while the study of stability conditions remains an open problem. In addition, low-level control of the actuators in Thuruthel et al. (2017) employs high gains. As highlighted by DellaSantina et al. (2017), high-gain feedback control imposes de facto a reduction of the compliance of the system, thus potentially defeating the purpose of physical compliance. Recent research on finite-element (FE) models (Bieze et al., 2018; Goury and Duriez, 2018) has shown promising results in reducing computation time. This has allowed using FE models for control purposes (Bieze et al., 2018; Zhang et al., 2016), but this approach is only intended for quasi-static conditions.
Model-based closed-loop control has been indicated as particularly promising for accurate positioning (Thuruthel et al., 2018). In addition, analytical control provides the tools to analyze the stability of the closed-loop system with respect to the dynamical model. Recent model-based controllers for soft continuum manipulators rely increasingly on concentrated-parameters models (DellaSantina et al., 2018; Falkenhahn et al., 2015; Godage et al., 2015; Sadati et al., 2018), which typically introduce the assumption of constant curvature (CC) or piecewise-constant curvature (PCC). The resulting discrete models are computationally more efficient than continuous models based on beam theory (Renda et al., 2014; Rucker and Webster, 2011), and thus more suitable for closed-loop control. However, the assumptions of CC and PCC might not be verified in the presence of disturbances. In addition, concentrated-parameters models only provide an approximation of the complex dynamics of soft continuum manipulators and are consequently less accurate than continuous models based on Cosserat rod theory (Alqumsan et al., 2019; Grazioso et al., 2018; Till et al., 2019). Lastly, a promising emerging trend in the modeling of soft continuum manipulators consists of employing a port-Hamiltonian approach (Ross et al., 2016), which focuses on the energy associated with the system (Moghadam et al., 2016). The main advantages of port-Hamiltonian modeling are the general applicability to different physical domains and the common formalism with energy-based control techniques.
Notable results in model-based control of soft continuum manipulators include feedback linearization techniques (Deutschmann et al., 2017; Gravagne et al., 2003) and optimal control (Falkenhahn et al., 2017). In addition, the combination of feedback and feed-forward actions was proposed by DellaSantina et al. (2017) in order to enhance robustness to uncertainties while preserving the compliance of the manipulator in closed loop, thanks to the use of small gains. More recently, sliding-mode control (SMC) algorithms, such as those reported in Slotine and Li (1991), were implemented for this class of systems by Alqumsan et al. (2019) for the case of bounded disturbances. Nevertheless, model-based dynamic controllers for soft continuum manipulators are still in their nascent stage. One of the main challenges is posed by unstructured environments due to the presence of unknown disturbances (Thuruthel et al., 2018).
Employing a concentrated-parameters model for control purposes enables a simpler controller design and a reduced computation time. Constructing a rigid-link model of a soft continuum manipulator involves associating unactuated degrees-of-freedom (DOFs) to the compliant elements, in a similar manner to flexible mechanisms (Franco et al., 2018; Yu et al., 2005). Controlling the resulting underactuated model in the presence of disturbances is a challenging engineering problem. Energy-shaping methods (Bloch et al., 2000; Ortega et al., 2002) are among the preferred choices for the control of underactuated mechanisms and they also appear particularly suited for soft continuum manipulators since they do not rely on high gains, hence they can preserve the system compliance in closed loop. In addition, robust or adaptive versions of energy-shaping algorithms have recently been developed to compensate for the effects of different types of disturbances (Donaire et al., 2017; Franco, 2019b). In particular, disturbances that only affect the actuated DOF are termed matched, while unmatched disturbances affect the unactuated DOF. One of the main difficulties associated with energy-shaping control is the need to solve a set of partial-differential equations (PDEs), which is notoriously problematic for systems with a large number of DOFs. While a variety of approaches have been investigated to circumvent this obstacle (Donaire et al., 2016; Nunna et al., 2015), they typically rely on restrictive assumptions and are difficult to generalize. In this respect, computing energy-shaping control laws in closed-form for larger classes of systems represents an open research problem with significant practical relevance, and is of immediate interest for the control of soft continuum manipulators (Katzschmann et al., 2019).
In this paper, an energy-shaping approach is investigated for the dynamic control of soft continuum manipulators consisting of one inextensible segment with a constant section, similar to Garriga-Casanovas et al. (2018), which bends due to internal pressurization resulting in a single control input, and is subject to unknown in-plane disturbances, which can be either matched or unmatched. To this end, a rigid-link model and a port-Hamiltonian formulation are employed. The main contributions of this work can be summarized as follows.
An adaptive algorithm for the online estimation of a class of linearly parameterized disturbances acting in the plane of bending is presented.
A controller design procedure is outlined and control laws are derived in closed-form for the case of an
A disturbance compensation strategy is implemented and stability conditions are discussed. Differently from other approaches, prior knowledge of the disturbance bounds is not required in this case.
An experimental validation of the proposed controller using a soft continuum manipulator consisting of one inextensible segment with pneumatic actuation in the presence of external forces.
It should be noted that this paper focusses on a planar case similarly to other recent work on the topic (DellaSantina et al., 2017, 2018; Marchese and Rus, 2016). However, it is shown that the results can be readily applied to the control of this type of manipulator in three-dimensional (3D) space.
The rest of the paper is organized as follows. In Section 2, the model of the manipulator is briefly introduced and the assumptions that define the control problem are detailed. In Section 3 the control laws are derived and the stability conditions are discussed. In Section 4, the simulation results for a rigid-link model and the experimental results for a soft continuum manipulator are presented. Finally, concluding remarks are summarized in Section 5, together with suggestions for future work.
2. Problem formulation
2.1. Model overview
A schematic of the soft continuum manipulator that serves as reference design for this work is shown in Figure 1. The manipulator consists of a tubular structure made of a hyper-elastic material (Elastosil M 4601) with a constant cross-section defining three equal internal chambers spaced at


where
For the purpose of deriving closed-loop control laws, the manipulator is modeled as a rigid-link system, similarly to Godage et al. (2015). The link lengths are defined as
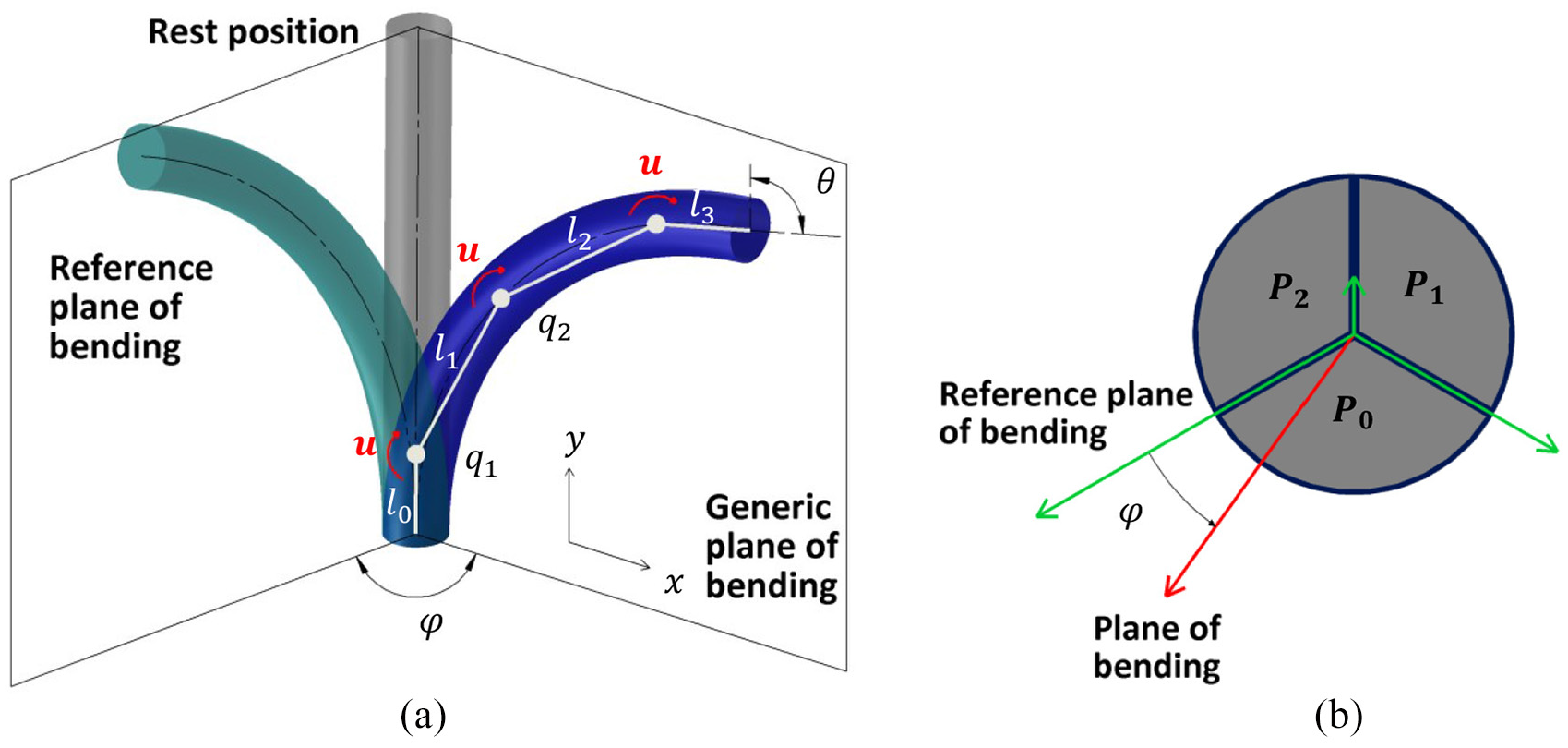
(a) Spatial configuration of the soft continuum manipulator and corresponding rigid-link model with
The dynamics of the

The
2.2. Assumptions
The following assumptions, which define the control problem considered in this work, are introduced and briefly discussed.

In particular, Assumption 1 implies that

The effect of un-modeled dynamics is accounted for by the time-varying parameter
Note finally that the rigid-link model approximates the dynamics of a soft continuum manipulator, since it is underactuated and it can include an arbitrary number
3. Controller design
3.1 Adaptive estimate of the disturbances
The unknown disturbances are estimated from the open-loop dynamics (2) using the Immersion and Invariance (I&I) method (Astolfi and Ortega, 2003; Astolfi et al., 2007), as outlined in the following proposition.


Computing the time derivative of (6) and substituting (2) and (6) gives

Substituting

Finally, choosing the Lyapunov function candidate

Employing (9) in the presence of variable disturbances does not ensure convergence of the estimate to the correct value. Nevertheless, the effect of the disturbances can be compensated for by an appropriate control action (see Corollary 1). Both the adaptive estimates (5) and (9) require full state feedback, which motivates the need for Assumption 1 in this work. This point becomes apparent observing that the term
3.2 Control law for CC equilibrium
The control aim considered in this work corresponds to stabilizing the desired equilibrium
where the parameter
where


Finding a closed-form solution of (12) is typically problematic for systems with a large number of DOFs. This is achieved here with the kinetic-energy-shaping design
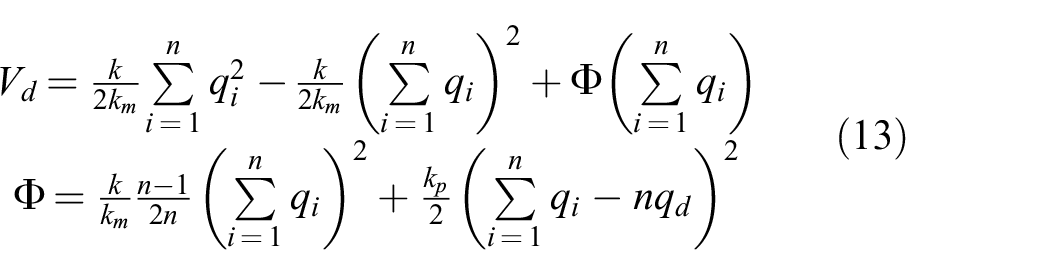
Choosing


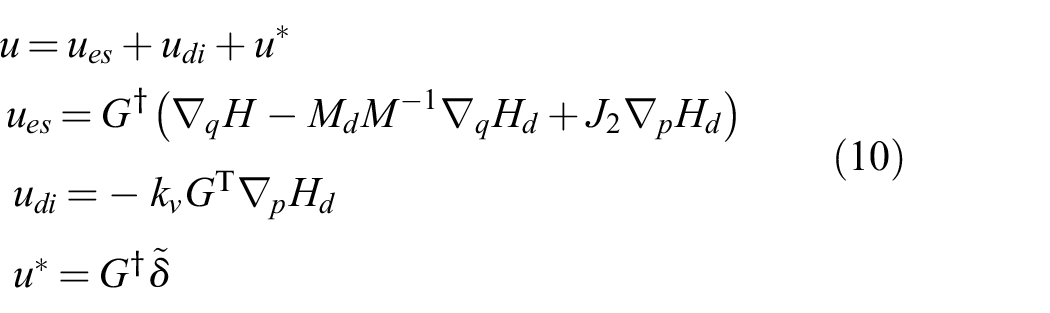
Substituting (13) into (10) gives

Alternative expressions of
Computing the term

Since
Matched disturbances can be expressed as
Introducing the Young’s inequality
If

Following the same procedure as Proposition 2, the corresponding stability condition is in this case
3.3 Control law for variable curvature equilibrium
Solving (3) for the case of in-plane unmatched disturbances results in a new set of attainable equilibria

where
To account for in-plane unmatched disturbances in the controller (10), the gradient vector

This approach preserves the solution of the PDE (13) and the expression of
where


Condition (24.a) is immediately verified, while (24.b) depends on the structure of the disturbances. Considering the case of constant

The disturbance compensation term

Introducing the Young’s inequality
Thus, if
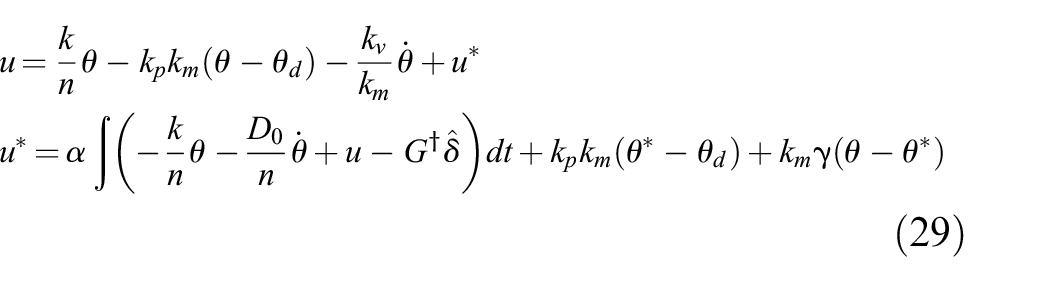
The integral term in (29) corresponds to the cumulative disturbance estimate

and provided that

Substituting
We recall that
Introducing the Young’s inequalities

where
Note finally that, if

where
4. Results of simulations and experiments
The proposed controllers are implemented for the soft continuum manipulator described by Garriga-Casanovas et al. (2018), by employing a
4.1 Simulations
Simulations were conducted in MATLAB, by employing the solver
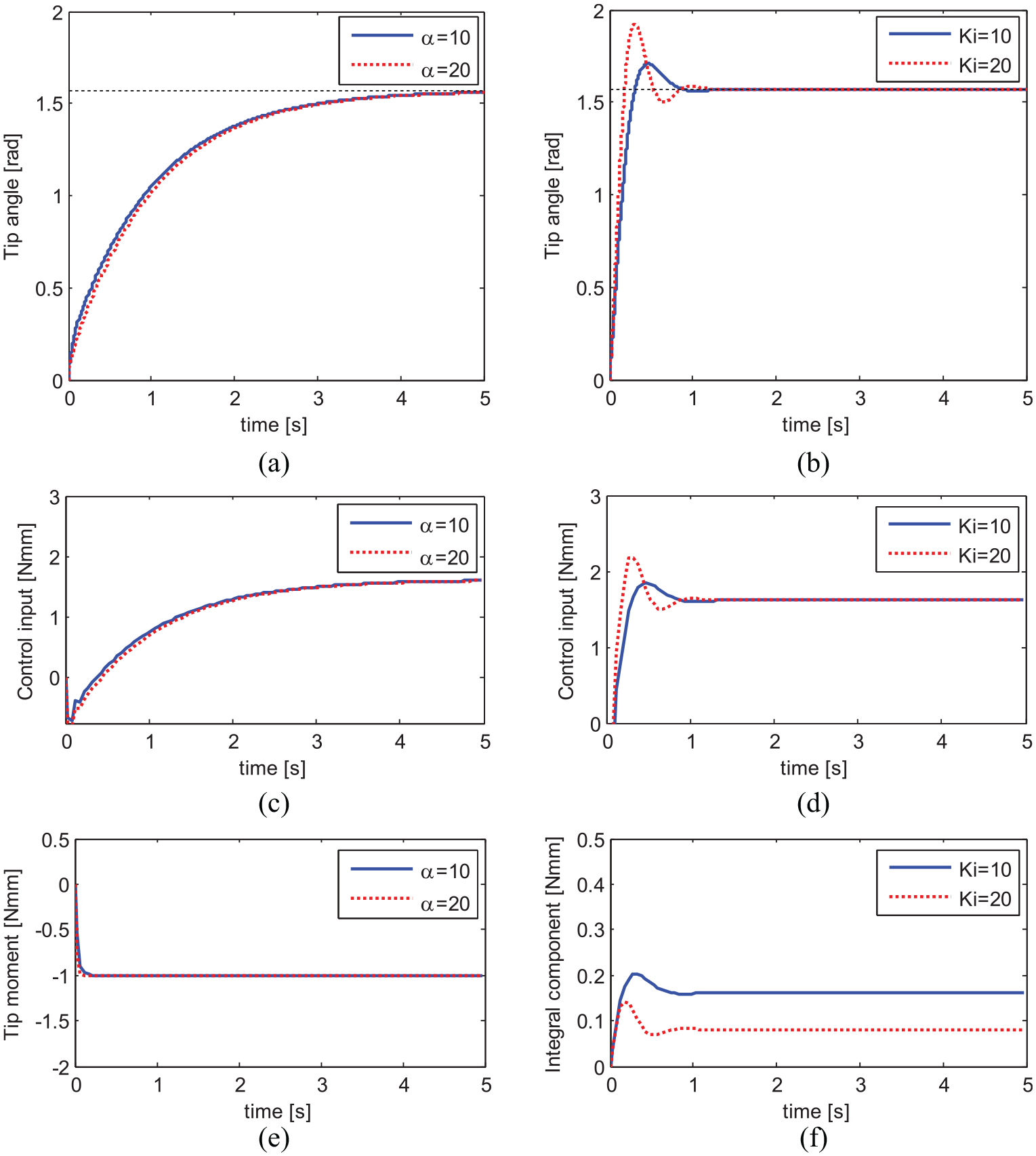
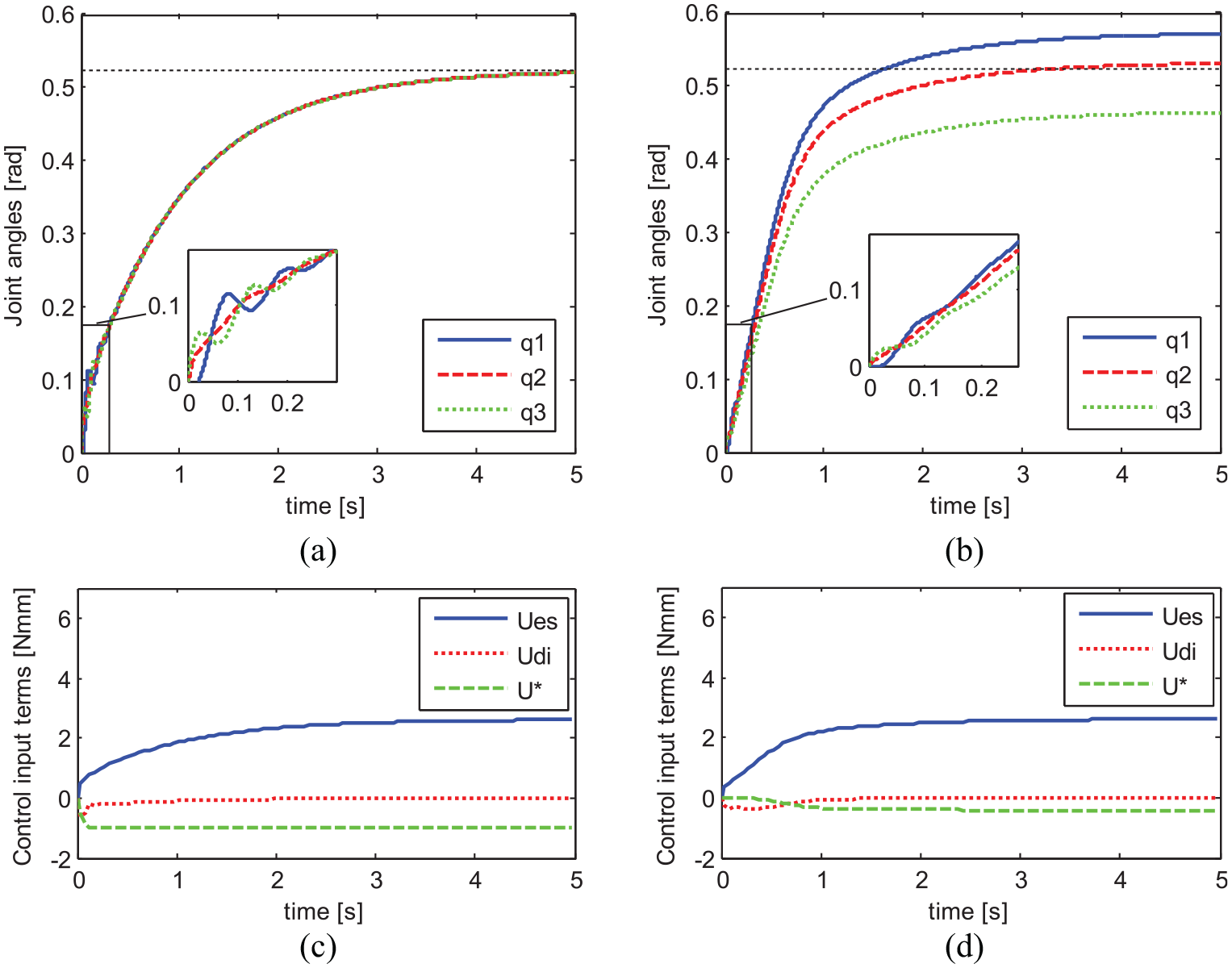
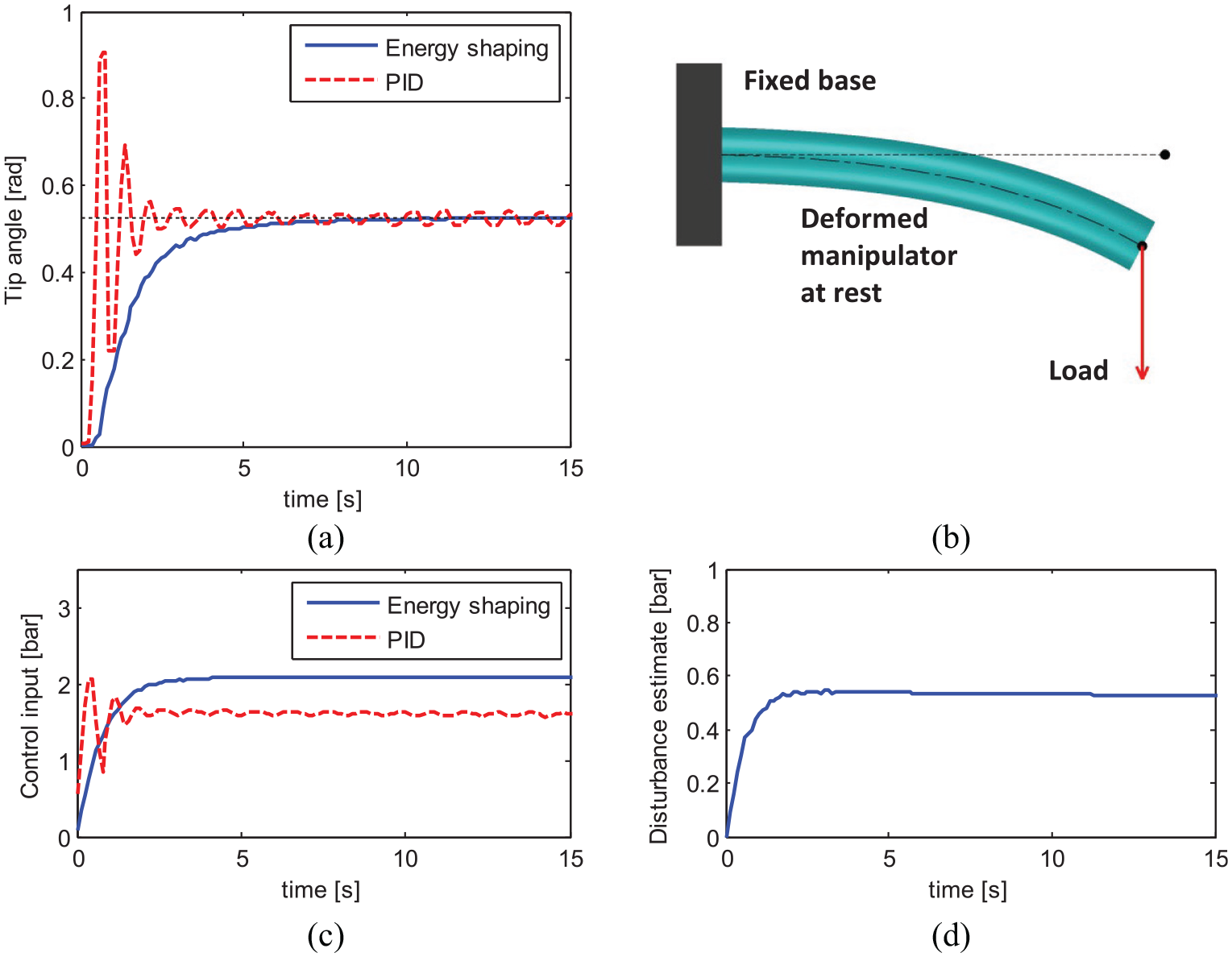
Simulation results for tip moment
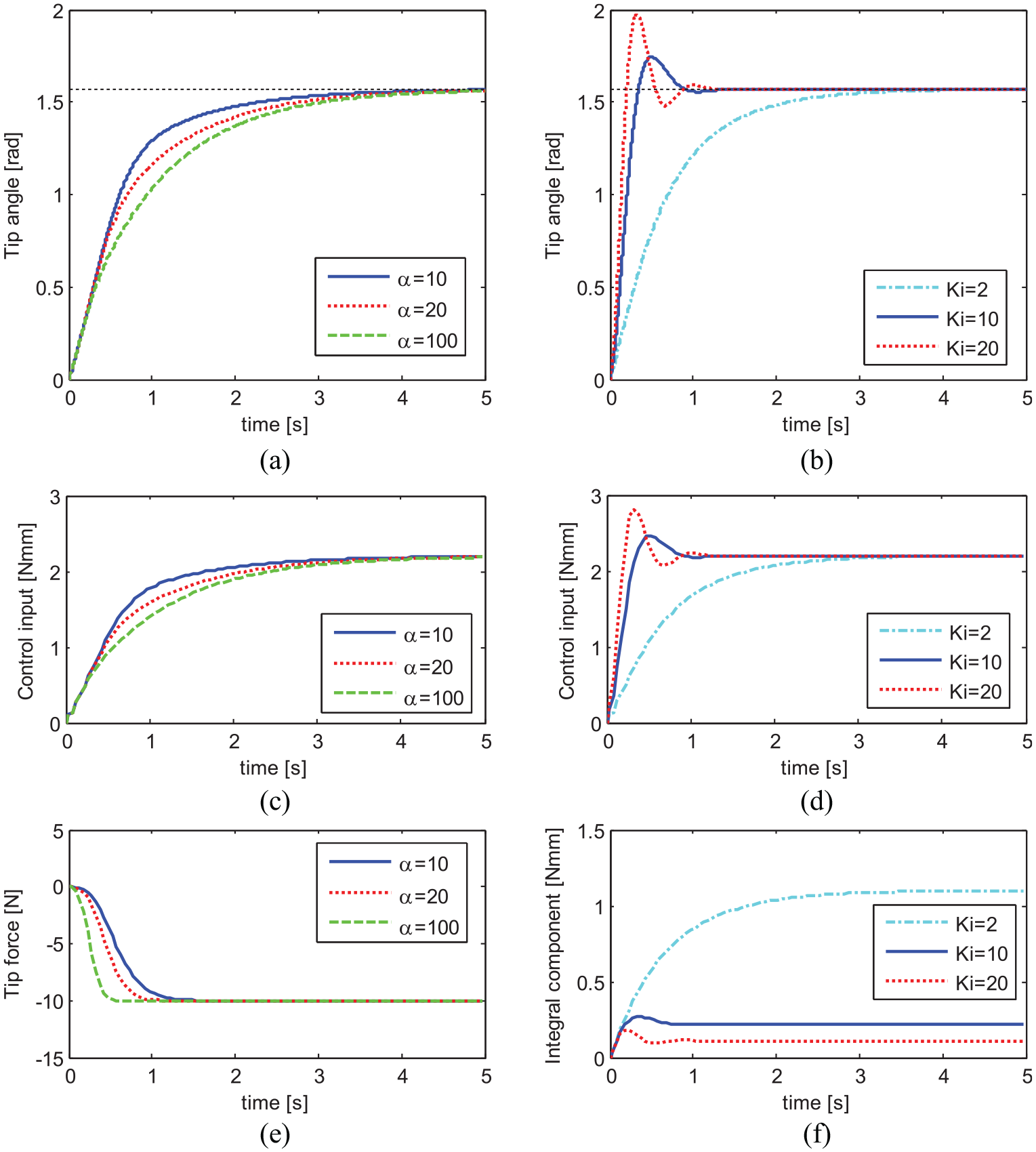
Simulation results for tip force
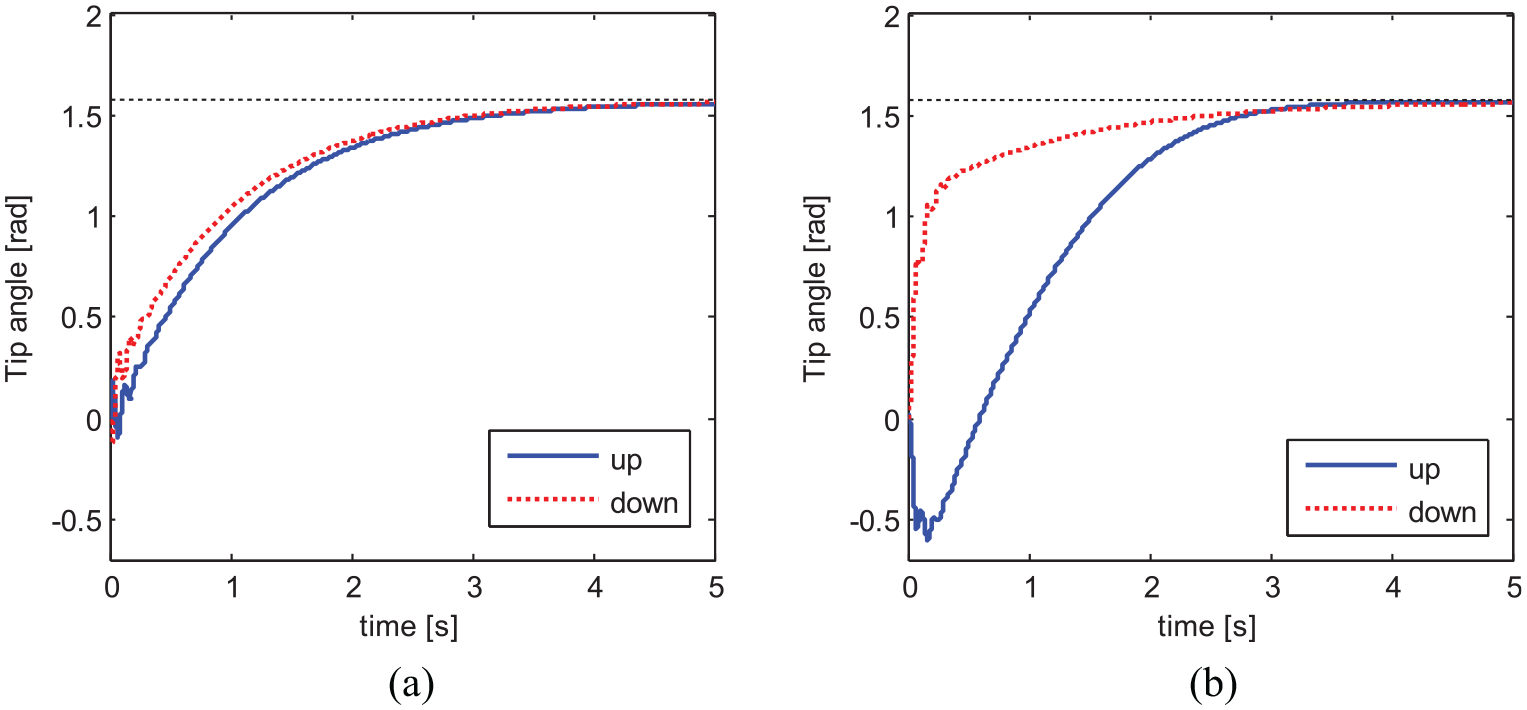
Simulation results with manipulator weight amplified by a factor of 10: (a) time history of the tip rotation with controller (10), (26) using
In the case of matched disturbances both controllers correctly achieve the regulation goal, which corresponds to CC equilibrium (see Figure 2). Their smooth and slow response is due to the presence of open-loop damping and to the use of small gains. In particular, the adaptive controller (10), (26) results in a slower and smoother response compared to the PID baseline with the same tuning. Employing
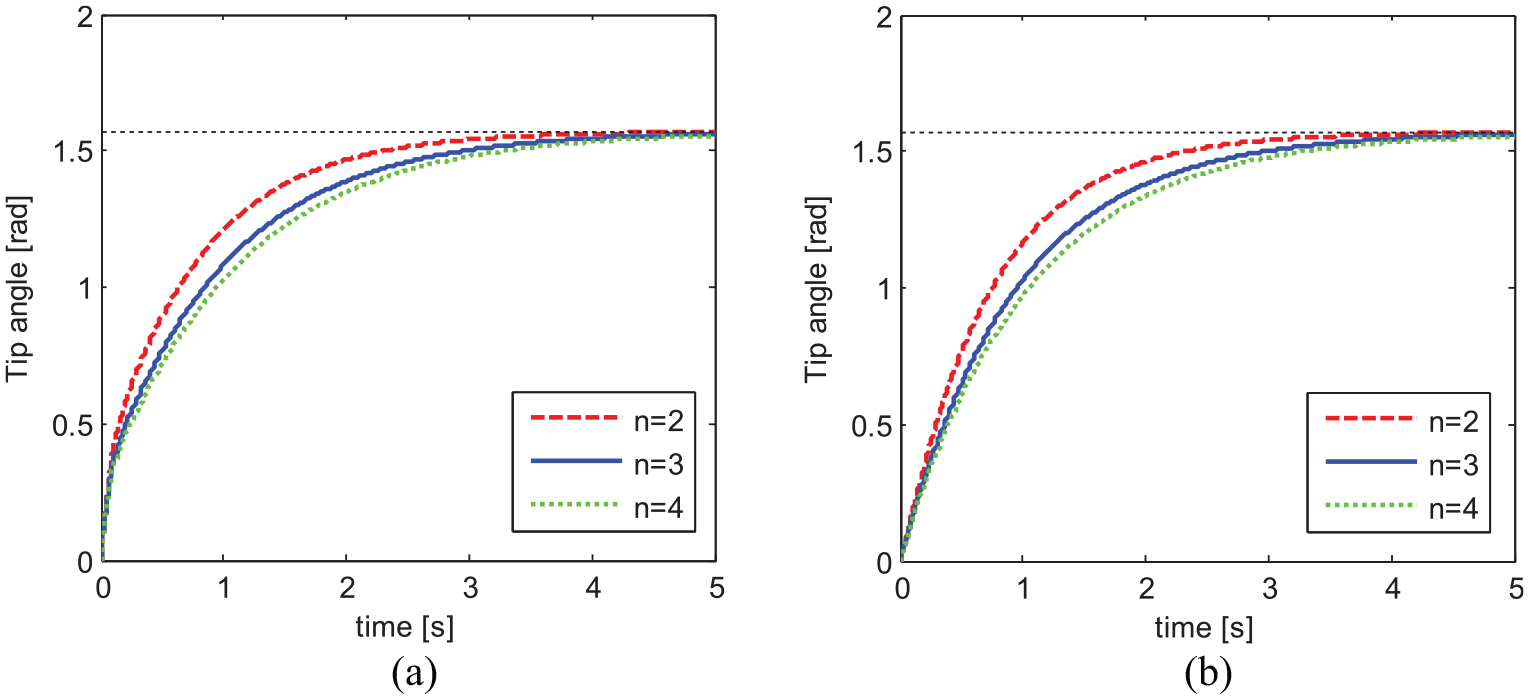
The simulation results for the case of unmatched disturbances are shown in Figure 3. Also in this case, the regulation goal is correctly achieved by both controllers. The system response with the adaptive controller (10), (26) is similar for different values of
The simulation results for a different type of unmatched disturbances representative of the weight of the manipulator amplified by a factor 10 are shown in Figure 4 considering two opposite mounting positions (i.e. gravity vector pointing up or down with respect to the robot frame). In both cases the manipulator at rest is horizontal while the weight of each segment acts in the vertical direction. The same tuning is employed for the parameters
The time history of the position
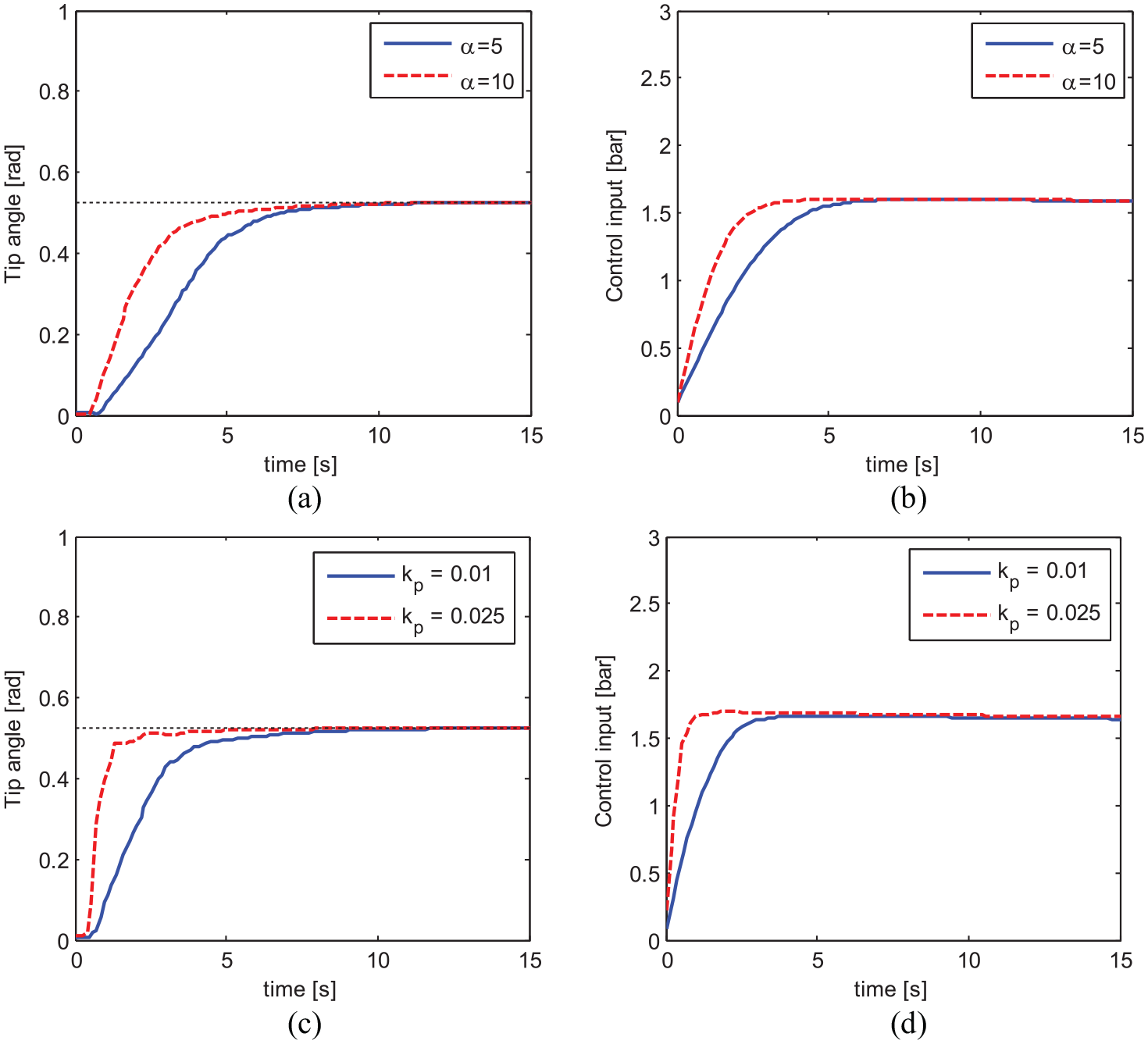
Simulation results with controller (10), (26) and
The system response with controller (29) employing the same tuning parameters is shown in Figure 6 for both disturbances and for different values of
Simulation results: (a) time history of the tip rotation with
4.2 Experiments
4.2.1. Experimental setup
The controller (29) was tested on the soft continuum manipulator described by Garriga-Casanovas et al. (2018), shown in Figures 7(a) and (b), by employing the setup illustrated in Figure 7(c). The controller (29) was employed for the experiments since it does not require a kinematic observer to compute the states of the virtual joints (see Remark 6). The rotation
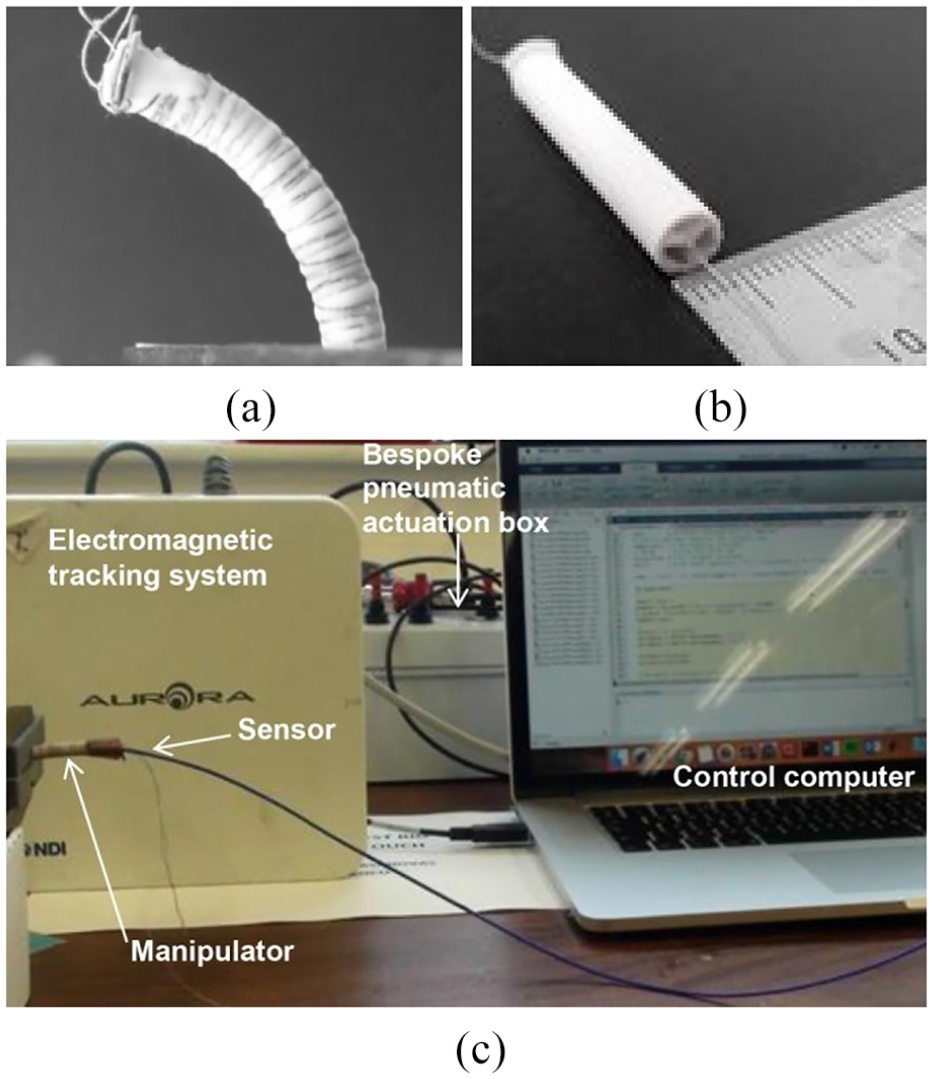
(a) Side view of the prototype of soft continuum manipulator from (Garriga-Casanovas et al., 2018); (b) detail view of the internal chambers; (c) Test setup.
4.2.2. Experimental results
The controller (29) correctly achieved the regulation goal
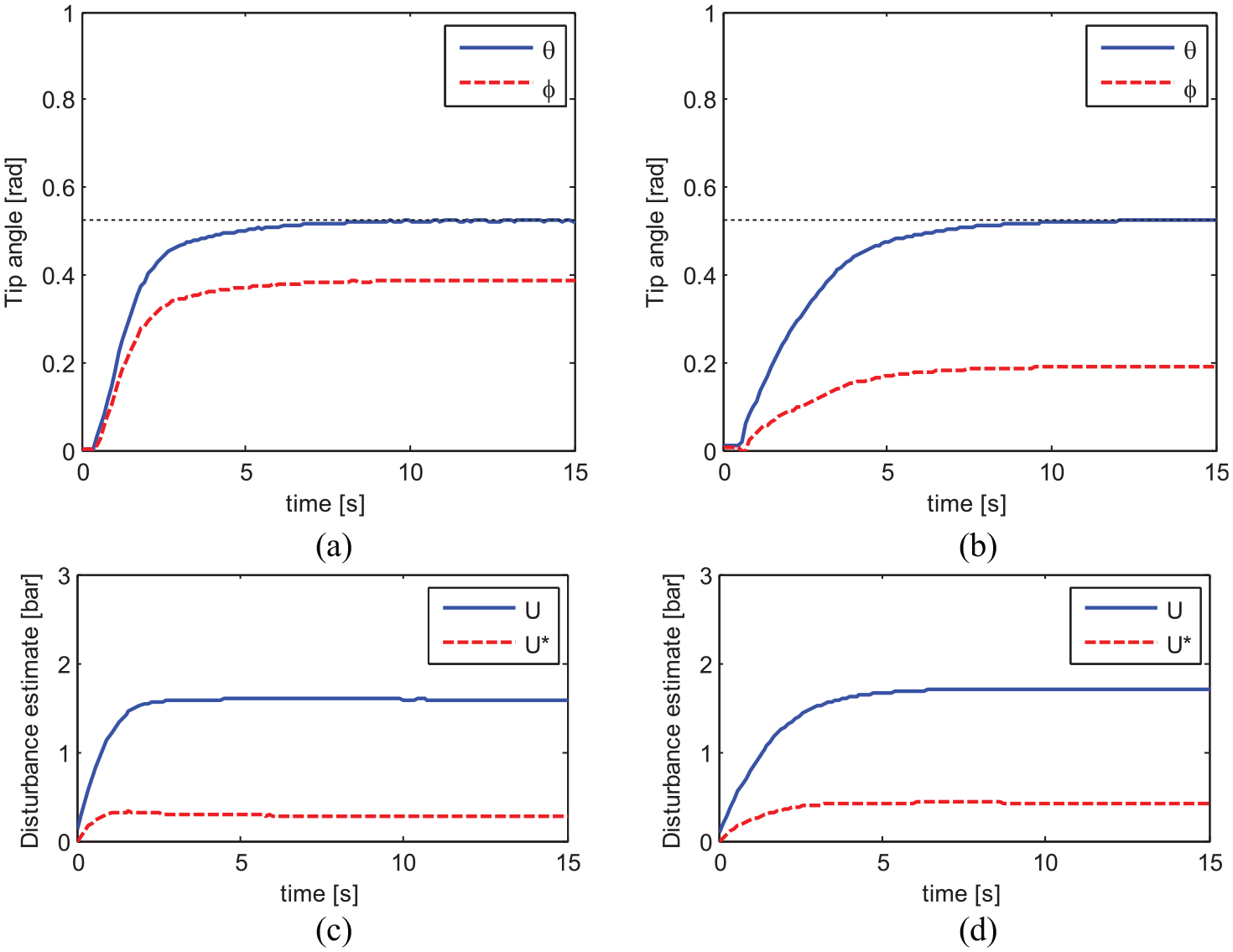
Experimental results: (a) tip rotations
Experimental results: (a) tip rotations
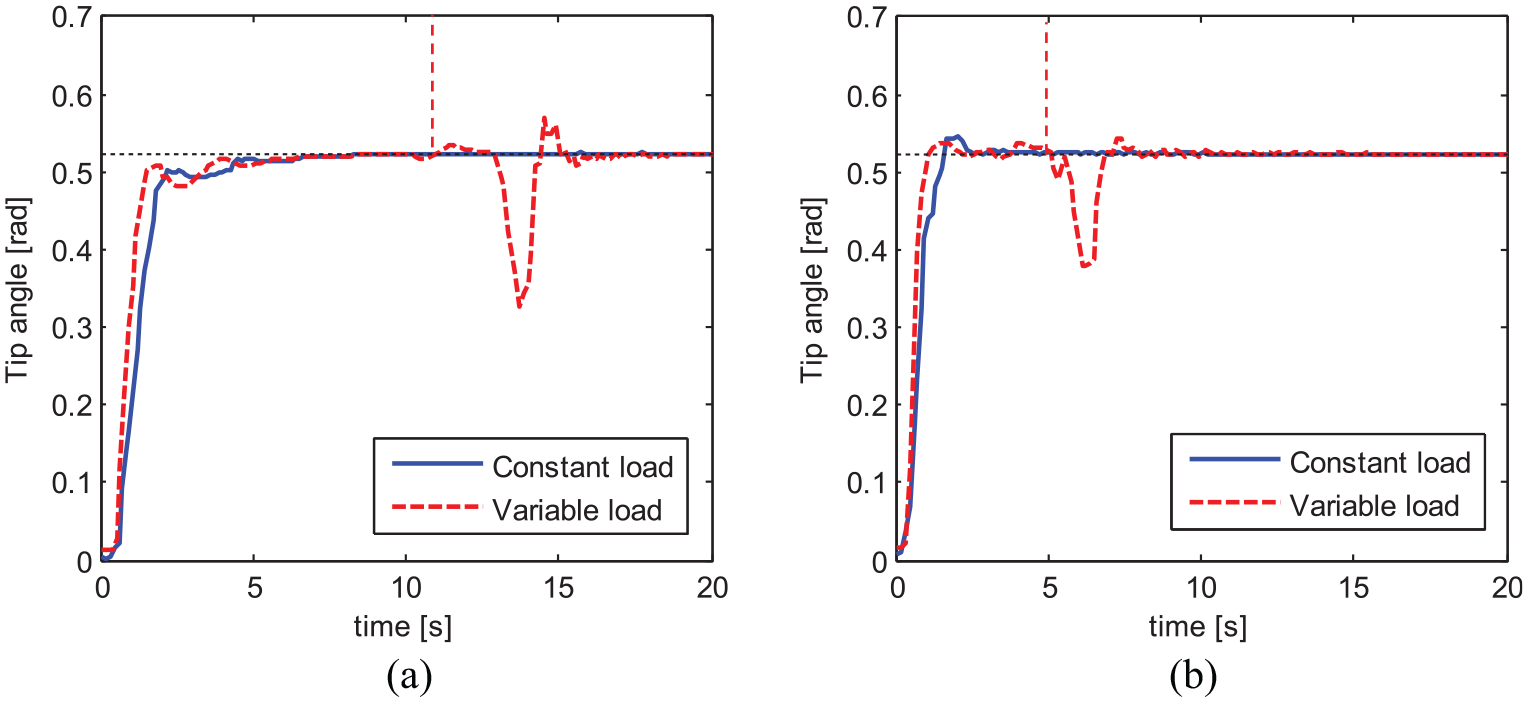
The repeatability of the closed-loop system response was assessed for the two regulation goals
A mass of 3 g, which is approximately twice the mass of the manipulator, was attached at its tip to introduce additional disturbances due to gravity (Figure 10). The results show that the controller (29) with
Experimental results with 3 g mass attached to the tip of the manipulator from the start of the test: (a) tip rotation
A further set of experiments was conducted attaching the 3 g mass to the tip of the manipulator during the test (Figure 11). Also in this case, controller (29) results in a smooth response and the increment in control input after the mass is attached to the manipulator corresponds to the increase in the cumulative disturbance estimate
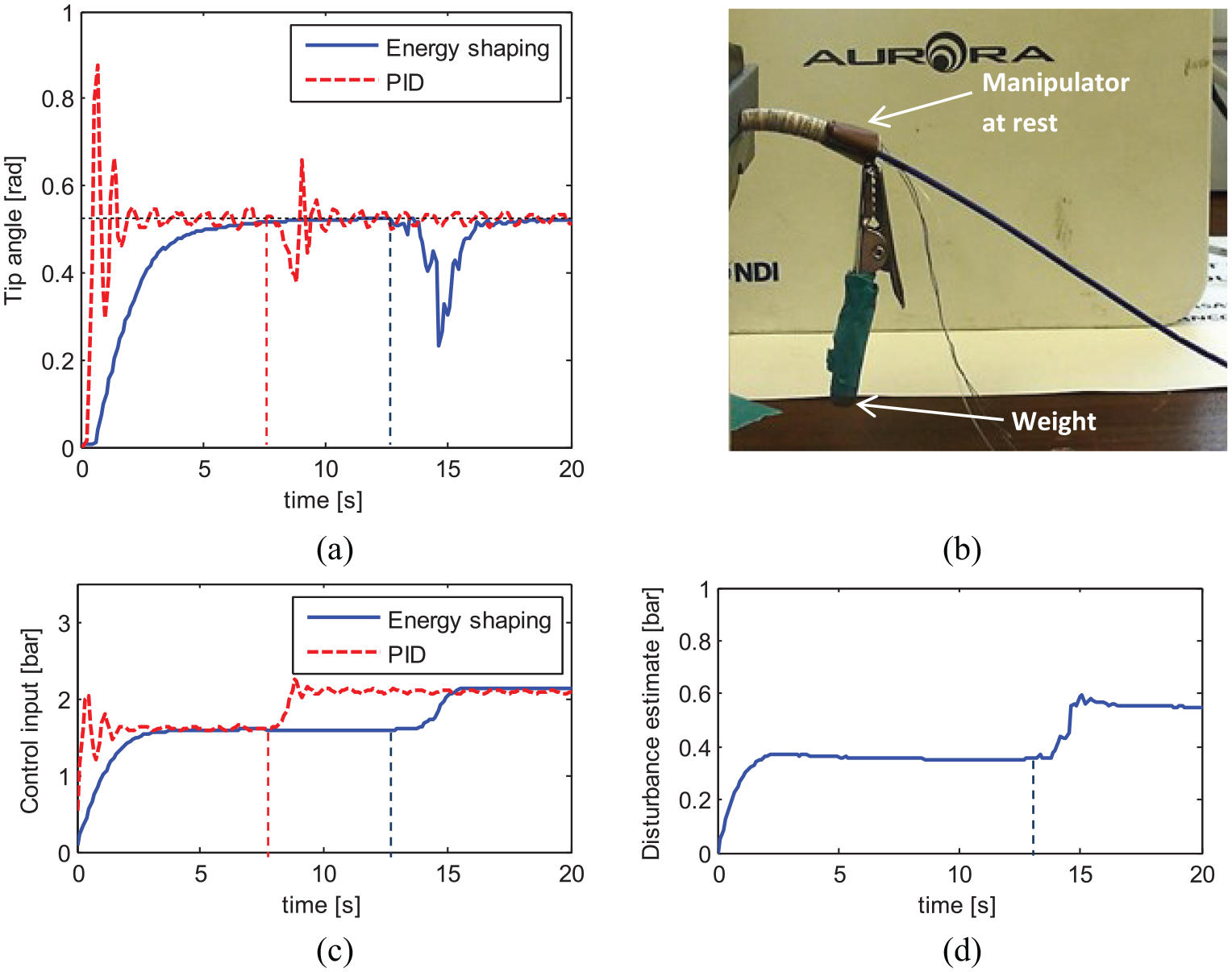
Experimental results with 3 g mass attached to the tip of the manipulator during the test: (a) tip rotation
Note finally that a very similar response of the controller (29) and of the PID can be achieved by reducing
5. Conclusions
An adaptive energy-shaping controller for a class of soft continuum manipulators subject to in-plane disturbances was designed by employing a rigid-link model and a port-Hamiltonian formulation. The rigid-link model approximates the dynamics of the soft continuum manipulator and simplifies the controller design. The effects of the discrepancies between the model and the real system are treated as disturbances and are compensated adaptively. Closed-form expressions of the control law for an
Although the controller presented in this work was implemented for a specific soft continuum manipulator consisting of one inextensible segment, we believe that the proposed approach is of wider applicability. Future work aims to extend the results to out-of-plane disturbances and to investigate the control of manipulators consisting of multiple segments arranged in series. In addition, we intend to include the pressure dynamics in the port-Hamiltonian model and to investigate the control of soft manipulators with long supply pipes within the context of a medical application. Finally, we intend to apply the proposed control approach to soft continuum manipulators that employ different types of actuation.
Footnotes
Appendix A
Inertia matrix
The terms
The rotational component of the kinetic energy is neglected in (A.1), in a similar manner to Godage et al. (2015).
Appendix B
For illustrative purposes, two alternative expressions of
Both (B1.a) and (B1.b) solve (12.a) and verify condition (14.a). Evaluating (14.b) for (B1.a) gives
which is verified for all
which is satisfied for all
The second term in (B4.a) is identical to that in (15) and results in a linear control law that, together with (16), is akin to a familiar PD controller with feed-forward action. Instead, (B4.b) is a nonlinear control law.
Appendix C
Additional simulation results (see Figure C1) and experimental results (see Figures C2 and C3).
Acknowledgements
The authors wish to thank Professor Alessandro Astolfi and Professor Ferdinando Rodriguez Y Baena for helpful discussions on various aspects of the paper.
Declaration of conflicting interests
The authors have no conflicts of interest to declare.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Engineering and Physical Sciences Research Council (grant number EP/R009708/1). Arnau Garriga Casanovas was also supported by an industrial fellowship from the Royal Commission for the Exhibition of 1851.