
Abstract
In this paper the optimal control and parameters design of fractional-order vehicle suspension system are researched, where the system is described by fractional-order differential equation. The linear quadratic optimal state regulator is designed based on optimal control theory, which is applied to get the optimal control force of the active fractional-order suspension system. A stiffness-damping system is added to the passive fractional-order suspension system. Based on the criteria, i.e. the force arising from the accessional stiffness-damping system should be as close as possible to the optimal control force of the active fractional-order suspension system, the parameters of the optimized passive fractional-order suspension system are obtained by least square algorithm. An Oustaloup filter algorithm is adopted to simulate the fractional-order derivatives. Then, the simulation models of the three kinds of fractional-order suspension systems are developed respectively. The simulation results indicate that the active and optimized passive fractional-order suspension systems both reduce the value of vehicle body vertical acceleration and improve the ride comfort compared with the passive fractional-order suspension system, whenever the vehicle is running on a sinusoidal surface or random surface.
Introduction
The suspension system is an important part of the vehicle, and its performance plays a decisive role in the ride comfort, operation, and stability. Viscoelastic vibration isolation material is a major component of the vehicle suspension system, such as air springs, viscous dampers, magneto-rheological (MR) dampers. At present, air springs, and viscous dampers are widely applied to the design of suspension for many trucks, passenger cars and high-class cars. At the end of the 20th century, Lord company and Delphi company researched and developed different semi-active systems which contain MR dampers. Since then, MR dampers are also widely used in the design of vehicle suspension. Air springs, viscous dampers, and MR dampers are viscoelastic materials, so that it is not accurate to only use stiffness coefficients k or damping coefficients c to describe their dynamical properties. In 1936, Gemant firstly presented fractional-order derivative models of viscoelastic materials. 1 In 1991, Makris proposed a fractional-derivative Maxwell model of viscous dampers. 2 In 1995, Oustaloup presented the CRONE suspension which resulted from a traditional suspension model whose spring and damper were replaced by mechanical and hydropneumatic system defined by fractional-order force–displacement transmittance. 3 In 2016, Chen used fractional-order differential equation to describe the dynamical behaviors of MR dampers. 4 All these studies suggested that it is more reasonable to use fractional-order derivative model to describe the dynamical behaviors of viscoelastic materials than integer-order one. Accordingly, in order to study the vehicle suspension system conveniently and effectively, fractional-order derivative should be introduced into the model of vehicle suspension system. Nowadays, more and more attention has been paid on the fractional-order vehicle suspension system. Moreau and Altet researched the stability and control strategy of fractional-order vehicle suspension system.5,6 Daou et al. emphasized the inertial effect and the nonlinear relations involved in the fractional-order vehicle suspension system.7,8 Daou et al. also dealt with the effects of the structural uncertainties on the fractional-order vehicle suspension system. 9
The passive vehicle suspension system was firstly presented by Olley in 1930s, which was generally composed of the stiffness-damping system. However, the parameters of passive vehicle suspension system could not be adjusted after they were determined. In other words, the parameters in the passive vehicle suspension system could not be changed with the external excitation, which limited the vehicle performance. The passive vehicle suspension system was most widely used because of its simple structure, reliable performance, and low cost. In recent years, along with the rapid development of vehicle technology, the requirements on ride comfort are getting higher and higher. Therefore, industrial countries had already begun to study the semi-active and active control systems, and the vehicle suspension system has experienced the changes from passive to semi-active and active forms.10,11 Although there are so many significant works in the area of optimal control and parameters design of the traditional vehicle suspension system, there is little significant work on the problem of the optimal control and parameters design of the fractional-order vehicle suspension system.
In this paper, the optimal control and parameters design of the fractional-order vehicle suspension system are investigated. The primary aim of this study is to improve the ride comfort, which means that the vertical vibration acceleration of vehicle body is reduced while the suspension deformation and the dynamic load of tire are controlled in permissible ranges. The fractional-order derivatives in the system come from the viscoelasticity of isolation devices, and they could be solved by approximate analytical method 12 and Oustaloup filter algorithm respectively. 13 The optimal control force of the active fractional-order vehicle suspension system is obtained based on optimal control theory, where the fractional-order derivatives in the system are replaced by the integer-order counterpart. A stiffness-damping system is added to the passive fractional-order vehicle suspension system, and the force arising from it should be as close as possible to the optimal control force of the active fractional-order suspension system. The passive fractional-order vehicle suspension system is optimized by using this method. Then, the parameters of the optimized passive fractional-order vehicle suspension system are obtained based on least square algorithm.
This paper is organized as follows. In “Dynamical model of active fractional-order vehicle suspension system” section, the dynamical model of active fractional-order vehicle suspension system is established. In “Processing fractional-order derivatives” section, the processing method of the fractional-order derivatives is presented. In “The solution of optimal control force” section, the optimal control force of the active fractional-order vehicle suspension system is obtained. In “Optimization of passive fractional-order vehicle suspension system” section, the parameter optimization of the passive fractional-order vehicle suspension system is discussed. In “Optimization example of fractional-order vehicle suspension system” section, the performances of the three kinds of fractional-order vehicle suspension systems are studied in time domain and frequency domain respectively. Finally, the conclusions are made in “Conclusions” section.
Dynamical model of active fractional-order vehicle suspension system
In this paper, a simplified quarter-vehicle model is selected as the research object, which is shown in Figure 1. According to Newtonian second law, the differential motion equation could be established as
The 2-degree of freedom (DOF) model of quarter-vehicle body.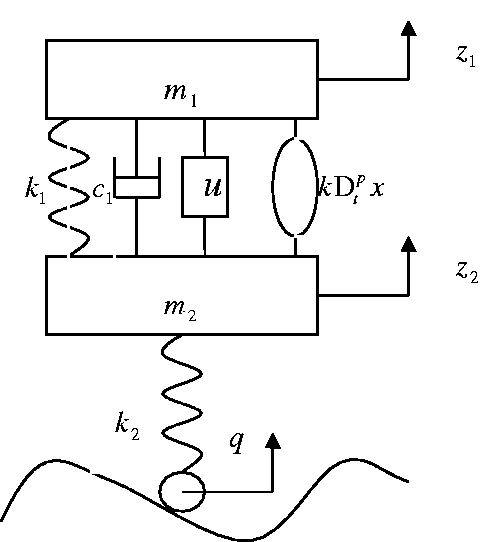

Processing fractional-order derivatives
The concept of fractional-order derivatives was firstly presented by Hospital and Leibniz in the late 1600s. After 300 years of development, several different definitions of fractional-order derivatives were presented by mathematicians.14,15 Here Caputo’s definition is adopted

At present, the computation methods of fractional-order derivatives are roughly divided into three kinds, i.e. approximate analytical method, numerical simulation, and filter algorithm.16,17 In this paper, the approximate analytical method and filter algorithm are adopted.
Oustaloup filter algorithm of fractional-order derivatives
Under zero initial conditions, the Laplace transform of fractional-order derivatives is

At present, the approximate filter algorithm of fractional-order derivatives includes three forms, i.e. continued fraction approximation,
18
Charef approximation,
19
and Oustaloup approximation.
20
In this paper, Oustaloup approximation is adopted. The principle of Oustaloup filter algorithm is that using higher-order transfer function approximately to replace the fractional-order operator



If Oustaloup filter order N is 3, 5, and 9, respectively, the effects of the filter approximation are shown in Figure 2 for Comparisons of Bode diagrams with different filter orders.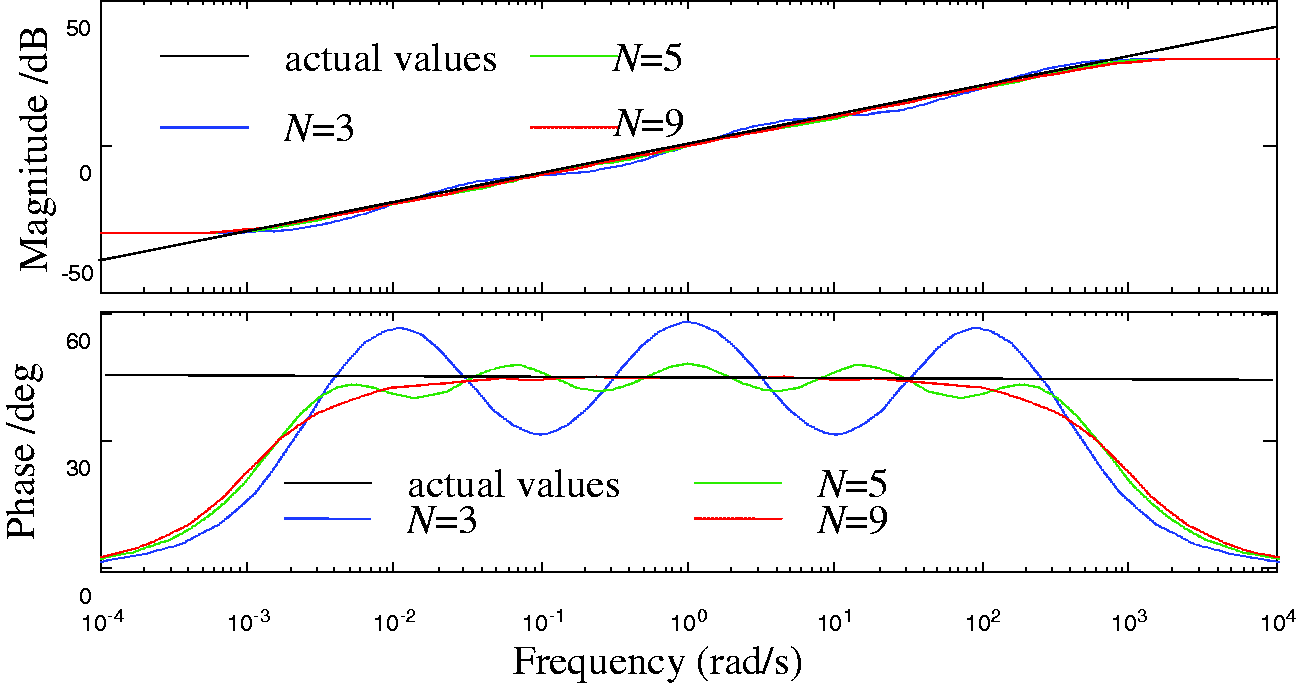
Approximate analytical method of fractional-order derivatives
Substituting

Let

Differentiating equation (8), the following result can be obtained

Introducing two formulae
21



Here we assume that

Differentiating equation (12), the following equation can be established

Because equation (11) and equation (13) are equal, one can obtain



Therefore any trigonometric function meets the following equality

The solution of optimal control force
The fractional-order derivatives in the system can be replaced by integer-order counterpart, when the vehicle is running on a sine surface.
22
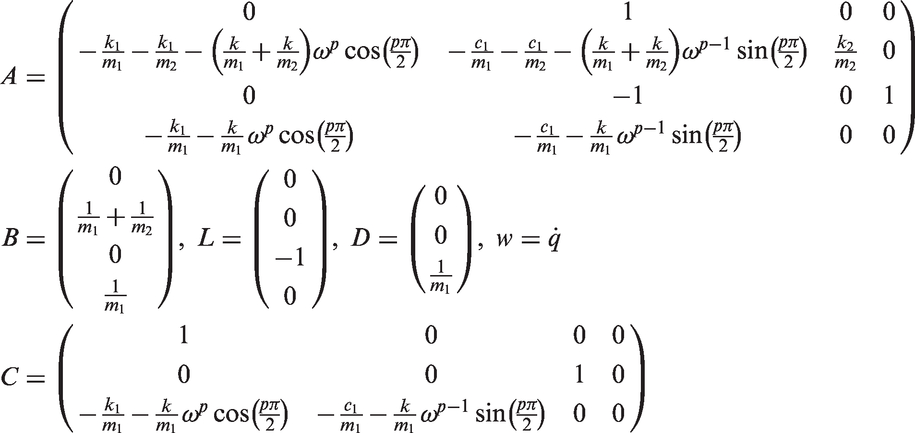
In order to use optimal control theory to find the explicit form of the optimal control force, equation (1) should be rewritten as the state equation. Considering state vector as




The primary aim of this study is to find out an optimal control force which makes the active fractional-order vehicle suspension system achieve the optimal performance. The performance of vehicle suspension system can be quantitatively evaluated in three indexes, i.e. the vertical acceleration of vehicle body which represents the ride comfort, the suspension dynamic deformation which represents the body posture and the suspension structure, and the dynamic load of the tire which represents the tire grounding characteristics. But these three performance indexes are normally contradictory. Therefore, the target performance index J can be set as the mean integral value of the weighted square sum of the active force, the body vertical vibration acceleration, the dynamic deformation of the suspension, and tire



Based on optimal control theory, there is an optimal control force


The matrix P can be achieved from the Riccati matrix algebraic equation

Optimization of passive fractional-order vehicle suspension system
A stiffness-damping system is added to the passive fractional-order vehicle suspension system, and the force arising from it should be as close as possible to the optimal control force of the active fractional-order vehicle suspension system. By using this method, the parameters of the optimized passive vehicle suspension system can be obtained. The force arising from the accessional devices is


Based on least square algorithm, the following function H can be constructed


Optimization example of fractional-order vehicle suspension system

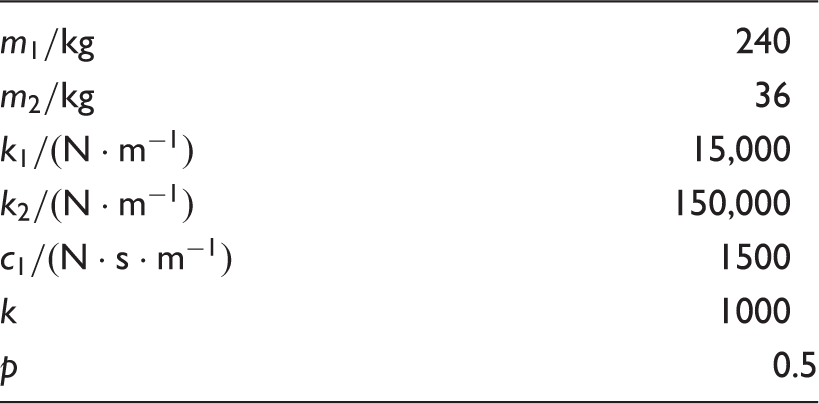
The parameters of the fractional-order vehicle suspension system.
The parameters of the accessional stiffness-damping system can be achieved from equation (27)

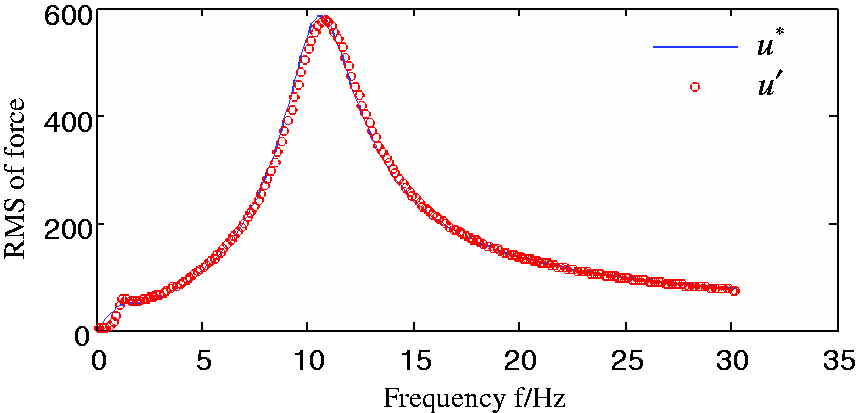
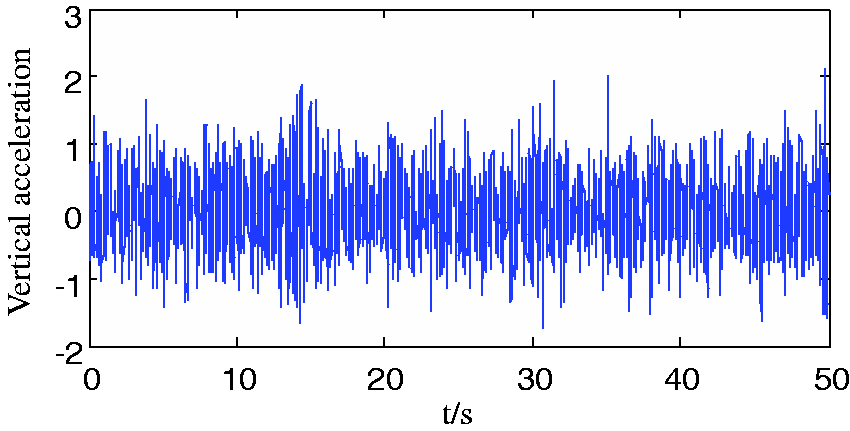
Next, the simulation model of the optimized passive fractional-order vehicle suspension is developed, when the vehicle is running on a sinusoidal surface and a random surface, respectively. Its simulation results are compared with those of the original passive and the active systems in time domain and frequency domain, respectively. In the random case the main evaluation indexes of the vehicle suspension system are root mean square (RMS) of steady-state vertical vibration acceleration of the vehicle body, the suspension dynamic deformation and the dynamic load of the tire. The simulation results are shown in Figure 3 to Figure 6, when the vehicle is running on a sinusoidal surface whose amplitude is The force The active and optimized passive suspension systems both significantly reduce the vehicle body vertical acceleration, and ride comfort is improved significantly. In this regard, their effects are very well. In regard of the dynamic deformation of suspension, the effects of the active and optimized passive suspension systems are not good compared with the passive suspension system. But the weakness is not so significant to affect the whole performance of the suspension system. In regard of the dynamic load of the tire, the active and optimized passive suspension systems present good effect compared with the passive suspension system in Root mean square (RMS) of the force

The pavement roughness coefficient.

RMS of fractional-order vehicle suspension performance indicators.
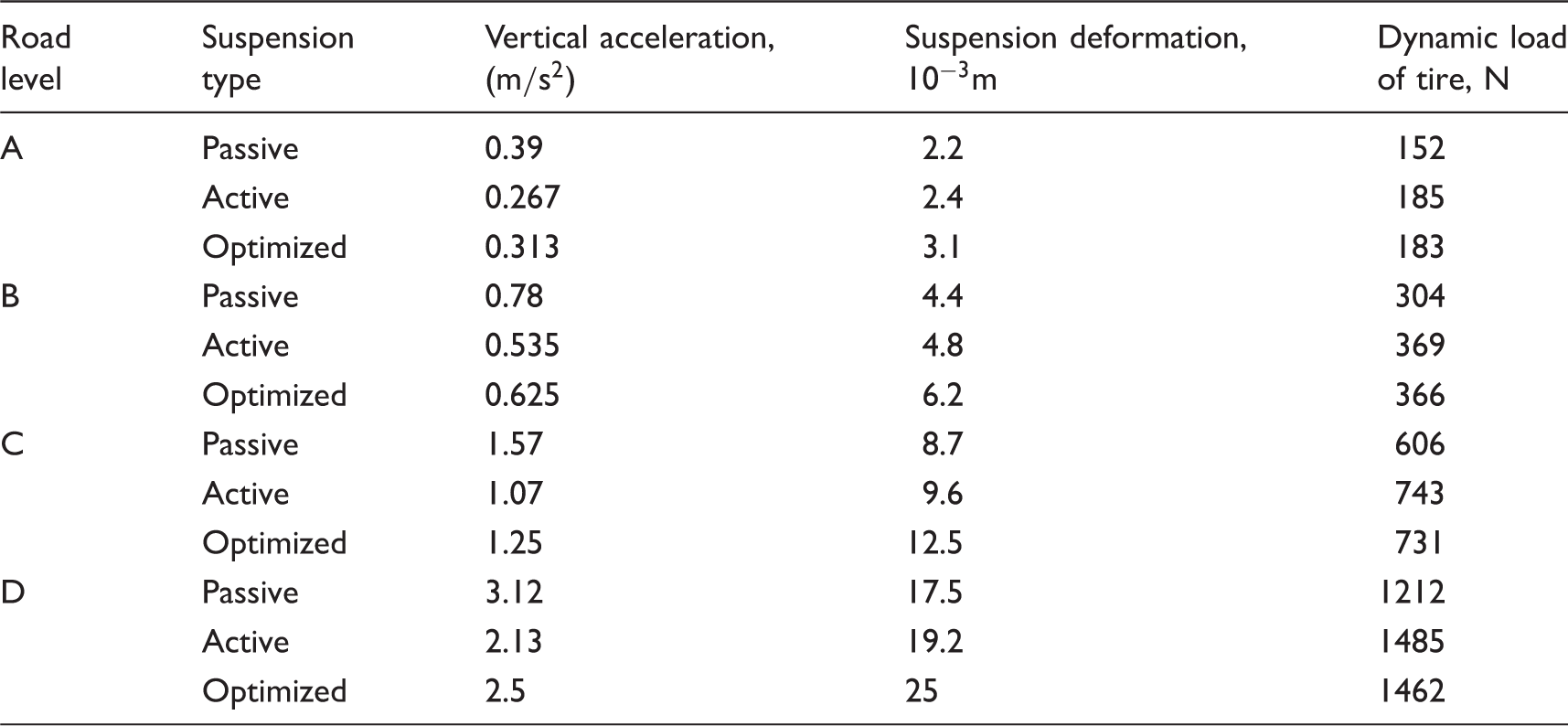
RMS: root mean square.
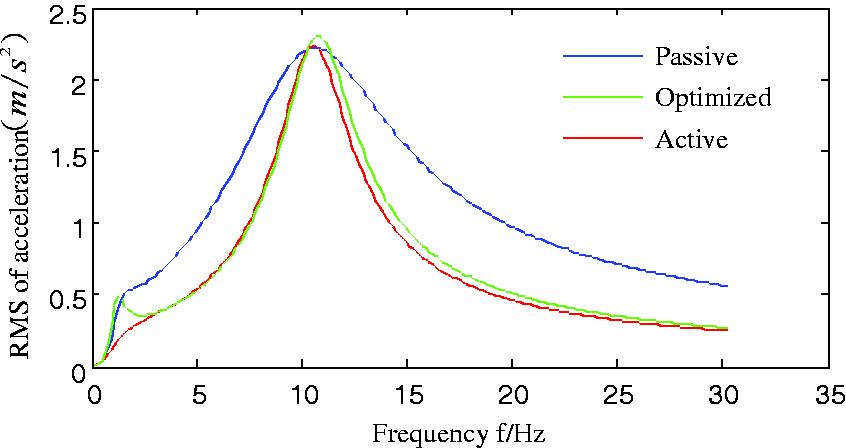
Root mean square (RMS) of acceleration.
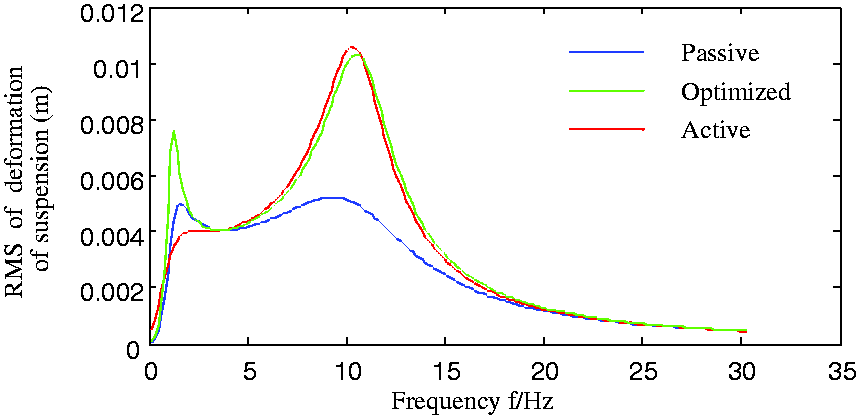
Root mean square (RMS) of deformation of suspension.
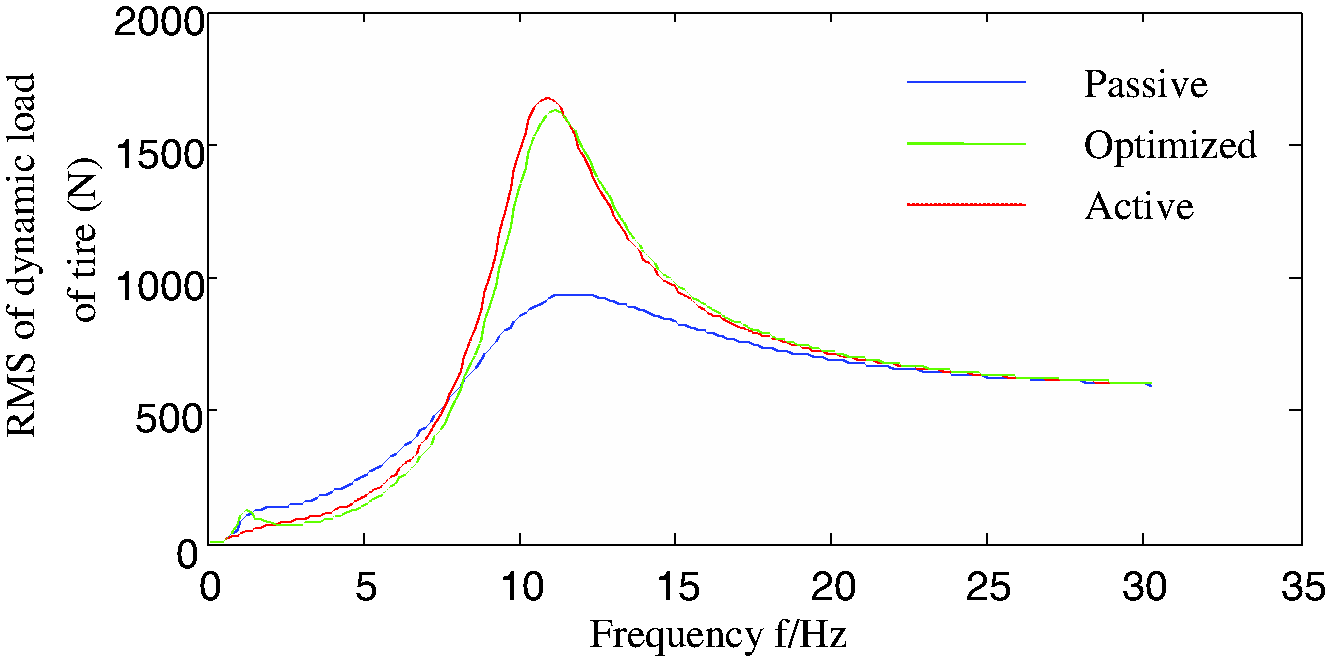
Root mean square (RMS) of dynamic load of tire.
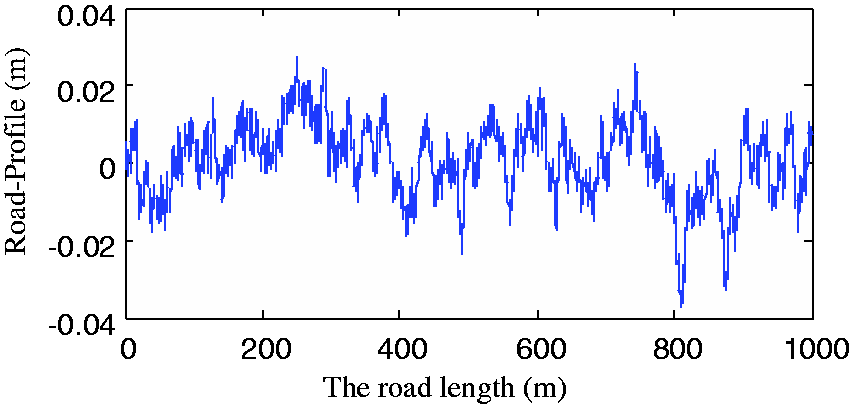
B-class road model.
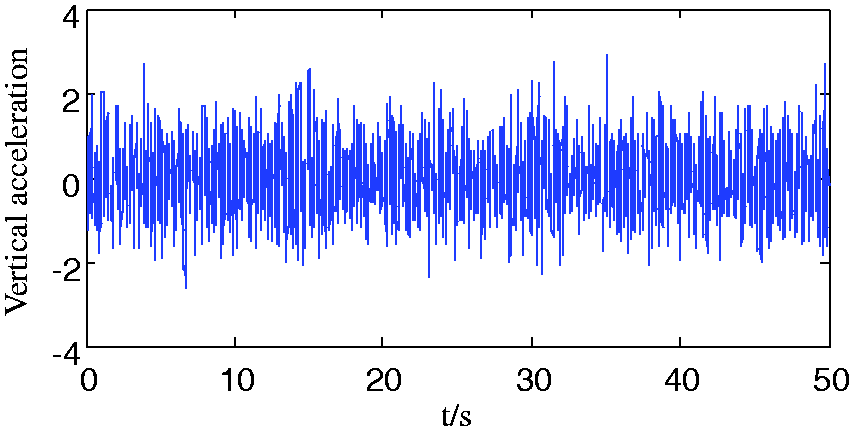
Passive fractional-order vehicle suspension.
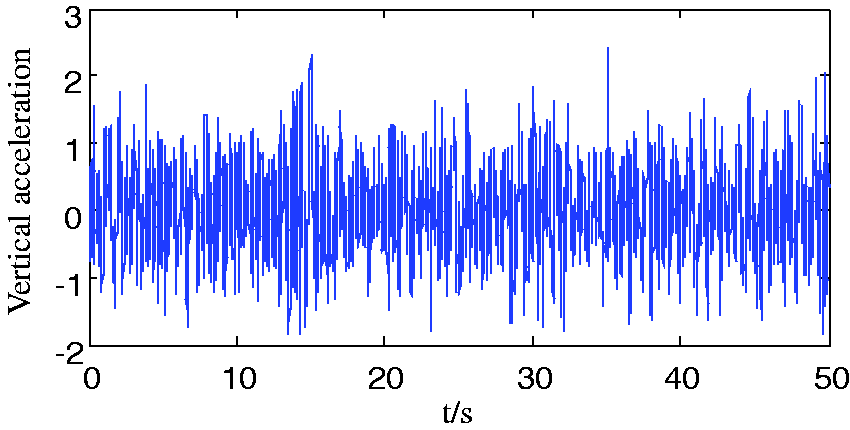
Optimized passive fractional-order vehicle suspension.
Active fractional-order vehicle suspension.
Conclusions
In this paper, the optimal control force of the active fractional-order vehicle suspension system is obtained based on optimal control theory, where the fractional-order derivative in the system is replaced by the integer-order counterpart. A stiffness-damping is added to the passive fractional-order vehicle suspension system and the force arising from it should be as close as possible to the optimal control force of the active fractional-order vehicle suspension system. The passive fractional-order vehicle suspension system is optimized by using this method. Then, the parameters of the optimized passive fractional-order vehicle suspension system are obtained based on least square algorithm. Finally, we compared the response of three kinds of vehicle suspension systems. The simulation results indicate that the active and optimized passive suspension systems both reduce the values of the vertical acceleration of vehicle body and improve the ride comfort compared with the passive suspension system, whenever the vehicle is running on a sine surface or random surface. This paper provides a guideline for the optimal control and parameters design of fractional-order vehicle suspension system, and also provides a simple and easy method for solving the similar engineering problems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: National Natural Science Foundation of China (No. 11372198), the Cultivation plan for Innovation team and leading talent in Colleges and universities of Hebei Province (LJRC018), the Program for advanced talent in the universities of Hebei Province (GCC2014053), and the Program for advanced talent in Hebei Province (A201401001).