
Abstract
The active control of vibro-acoustic response using sound pressure feedback is numerically studied. An output feedback approach based on sound pressure measurement for modal pole placement is proposed. The control performance is evaluated for the case of a baffled plate. The finite element method and the Rayleigh integral are used to model the structural vibration and sound radiation. Measures of observability of a mode in pressure outputs and the effect of time delay in the pressure feedback loop are discussed. Numerical results show that the chosen poles may be assigned to predetermined values by the active control with complex gains. It is also demonstrated that the pressure feedback control may make a very large reduction in acoustic radiation and structural vibration of the controlled modes in a wide frequency band when using constant gain at a lower frequency.
Keywords
Introduction
There has been much work concerned with active vibration control (AVC) of flexible structures,1–5 and the great majority of the work has been concerned with feedback control. Fuller et al. 1 also deals with the field of active structural acoustic control (ASAC) in which structurally radiated sound is directly controlled by active structural inputs. In a general arrangement of ASAC, microphones are used as the error transducers, which directly measure the radiated pressure to be minimized and then provide the error signals. Burdisso and Fuller 6 obtained the error information by placing a single microphone in the acoustic far field and used a feedforward control approach to derive the optimum control input applied to the actuator. Clark and Fuller 7 used microphones as error sensors, while the control approach was based upon a filtered-X version of the adaptive least-mean-squares algorithm. Wang and Fuller 8 used a single microphone as an error sensor and defined the mean square of the error sensor signal as the quadratic cost function. Wang 9 investigated the optimal placement of microphones and piezoelectric transducer actuators for far-field sound radiation control with microphones used as error sensors and radiated sound power as the objective function. Berry et al. 10 investigated the acoustic near-field sensing strategies for active control of sound radiated from a plate. It is clear that in the general ASAC analysis, a quadratic cost function is formed based on the observed pressures, and the quadratic optimization theory is used to find the optimal control inputs that minimize the cost function. Besides the acoustic sensing and acoustic objective functions, structural sensing approaches11,12 and structural objective functions13–15 such as squared velocity, volume velocity, and weighted sum of spatial gradients were studied for ASAC. Berkhoff 16 discussed sensor scheme design for the active reduction of sound radiation from plates based on error signals derived from spatially weighted plate velocity or near-field pressure. In this paper, microphones are not used as error sensors; the acoustic pressures from the microphones are not sought to be minimized but to feedback for pole assignment for the active control of vibro-acoustic response. As is known, the sound pressure measurement by microphones is non-contact measurement and thus can eliminate mass loading due to use of vibration sensors such as accelerometers in AVC or ASAC implementations.
The problem of pole assignment (pole placement or eigenvalue assignment) has received considerable attention from the active-control and vibration communities over several decades. 5 The pole placement is about to set natural frequencies and damping to specified values and capable of changing their behaviour to respond in a desirable way to a varying demand. 17 A variety of pole assignment algorithms such as eigenvalue assignment by state feedback, eigenvalue assignment by output feedback, and robust eigenvalue assignment problem have been developed. 18 Ram and Mottershead 5 developed a new theory known as receptance method for pole assignment. The receptance method is based entirely upon measured vibration data in the form of receptances, there being no need to know or evaluate the mass, stiffness and damping matrices, no need to estimate the unmeasured state using an observer or a Kalman filter and no need for model reduction. 18 The independent modal space control, formulated by Meirovitch, 19 was based on the principle of modal decomposition and provides independent control over the natural frequencies and damping of structural vibration modes. The modal control in general refers to the procedure of decomposing the dynamic equations of a structure into modal coordinates and designing the control system in this modal coordinate system. As noted by Inman, 20 modal control can be cast either in ‘state space’ form or ‘physical space’ form (in terms of the physical modes of the structure). From the open literature, it may be concluded that most researchers used acceleration, velocity, and displacement feedback to assign eigen data of vibration systems. 21 In this paper, a modal pole assignment control method is proposed, which is based entirely upon sound data, not vibration data.
As stated before, in the present paper, structural sensing approaches are not used and also microphones are not used as error sensors, acoustic pressures from the microphones are used to feedback for pole assignment for the active control of vibro-acoustic response. The goal of this work is only to numerically study the possibility of active control by sound pressure feedback using modal pole assignment strategy. An output feedback approach based on sound pressure outputs is proposed for pole placement. The finite element method and the Rayleigh integral are used to model the structural vibration and sound radiation.
Theory
Conventional feedback control for pole assignment
The system considered here has the form



Let



Substituting 

If the output feedback is used, the input vector


Now, equation (1) is posed for modal pole assignment problem.
To cause the closed-loop system to have the desired eigenvalues and, hence, a desired response, the



By doing this, equation (10) reduces to the nd single DOF control problems of the form

In the case as acceleration feedback or velocity feedback or displacement, feedback is used independently, equation (14) represents an independent set of equations that can be solved for
For the case of harmonic excitation of frequency ω, equations (1) and (10) can be written as


The theory above began with the assumption of a multi-DOF lumped parameter system, flexible structures are distributed parameter systems which, in principle, have an infinite number of DOFs. In practice, flexible structures are discretized by a finite number of coordinates (e.g. finite elements), and this leads to a finite number of modes and is in general quite sufficient to account for the low-frequency dynamical behaviour in most practical situations. It is clear that both observation spillover and control spillover will inevitably be present when a distributed parameter system is controlled using the above modal control method which assumes a finite number of modes. The spillover phenomenon arises from the excitation of the residual modes (modes which are not accounted for by the control system) by the control (control spillover) and the contamination of the sensor output by the residual modes (observation spillover). It has been shown, however, that a small amount of damping greatly reduces the possibility of instability due to spillover. 22 The spillover problem will not be addressed in this paper.
Acoustic pressures at field points
For a time harmonic





The discretization of the Helmholtz integral equation



If a planar surface extends over an infinite half-space, then the acoustic pressure at any field point P according to the Rayleigh integral can be described as follows


The vector of normal velocity

Pole assignment using acoustic pressure feedback
In order to be able to feedback the field pressures, let

If the output feedback is used, the input vector


To cause full pole placement, complex gain is needed, that is

It should be noted that when using real control gain for the sound pressure feedback, the following holds


That is, the conditions given by equations (30a) and (30b) should be satisfied simultaneously by a real gain matrix
The effect of time delays in the feedback loop
One of the most important effects which limit the performance of feedback controllers in practical mechanical systems is unmodelled phase shift.
1
Such phase shift may arise because of the dynamic response of sensors or actuators used or may be due to time delays in the controller and sound propagation. Such time delay in the feedback path can be considered as

With such a delay, equation (29) becomes

It can be seen that for the pole assignment using acoustic pressure feedback, the effect of the delay, to a first approximation, is to change the natural frequency and the damping, especially the natural frequency is affected in a frequency-dependent manner.
Modal controllability and observability
Controllability and observability are structural properties that carry useful information for structural testing and control. A structure is controllable if the installed actuators excite all its structural modes. It is observable if the installed sensors detect the motions of all the modes.
25
A measure of modal controllability of the ith mode from the jth input could be defined by the consines of angles17,26


For pressure feedback, the measure of modal observability could be defined as

Active control simulation and vibro-acoustic response
For a structure and a multiple-input-multiple-output control system using acceleration/velocity/displacement feedback or pressure feedback, the modal pole assignment problem is to solve the gain
Once


Numerical results
The dimensions of a simply supported plate in a baffle considered ( Plate element mesh and sensor/actuator configuration.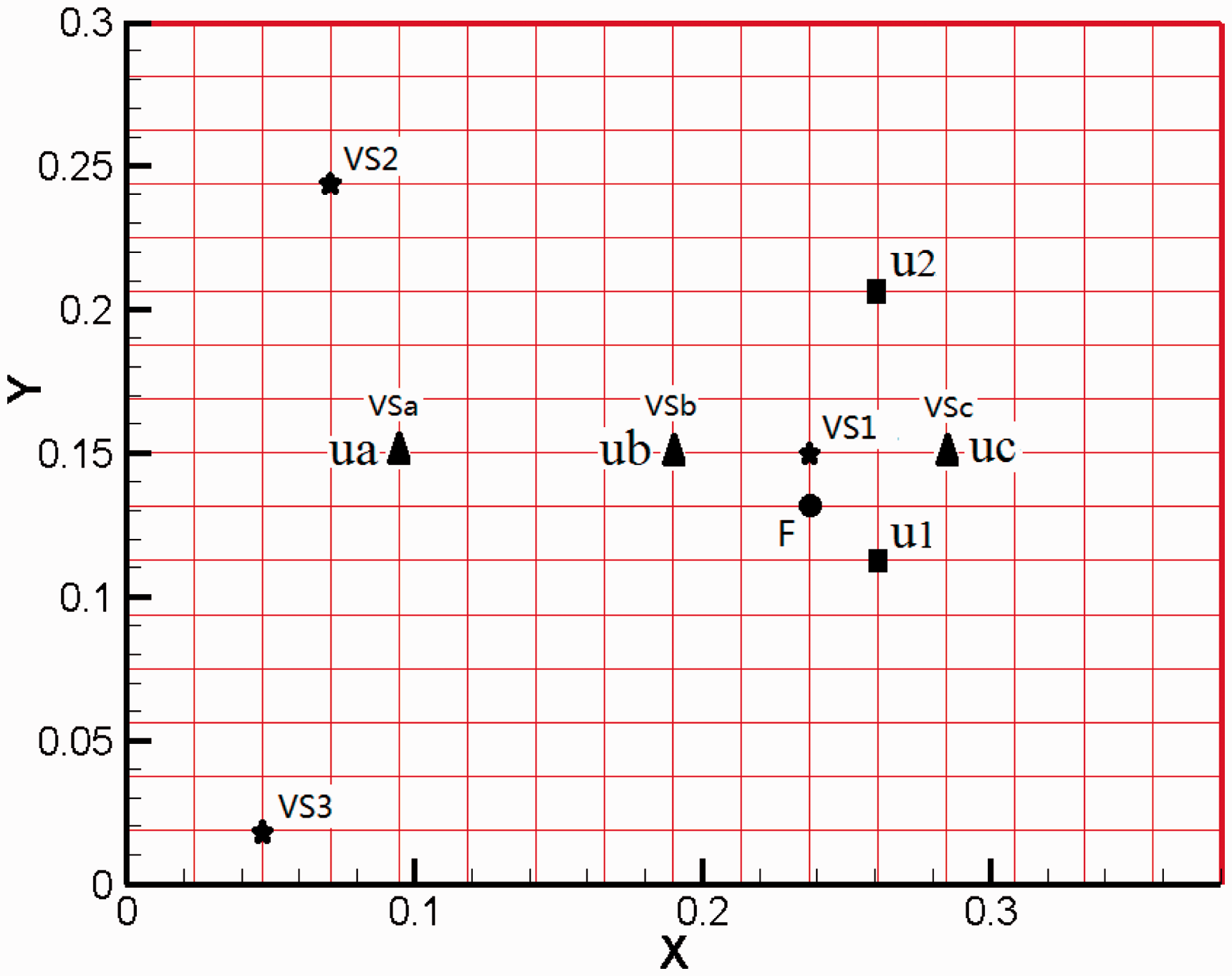
To control the structural vibration and acoustic radiation of the plate, a 2I3O control configuration is used, where “I” and “O” denote input and output channels, that is,
The plate is modelled by
Modal natural frequencies and modal damping ratios of the plate.

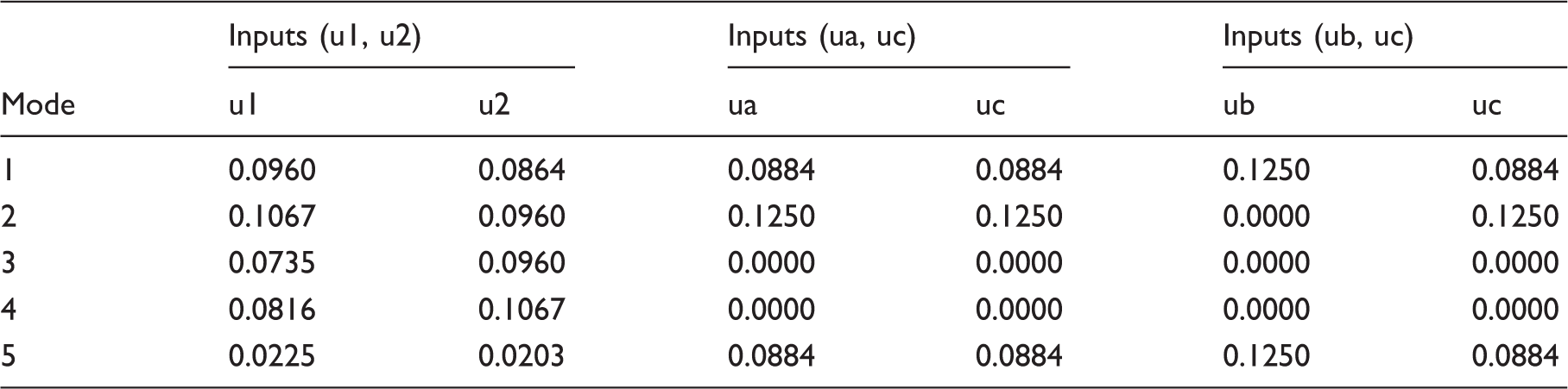
Modal controllability measures.
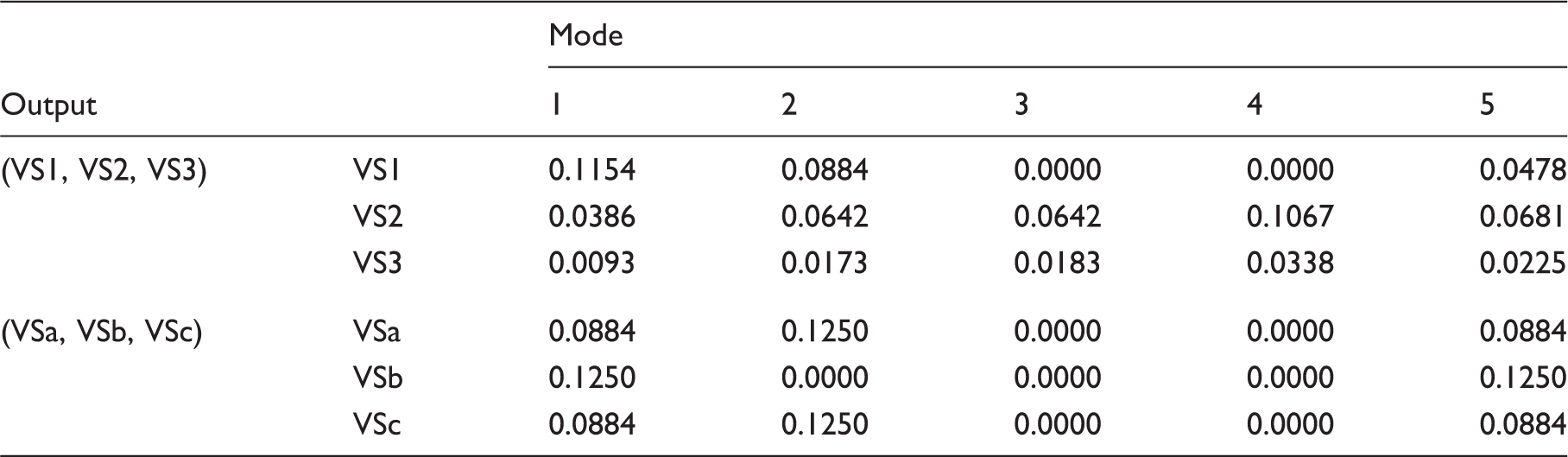
Modal observability measures of displacement outputs.
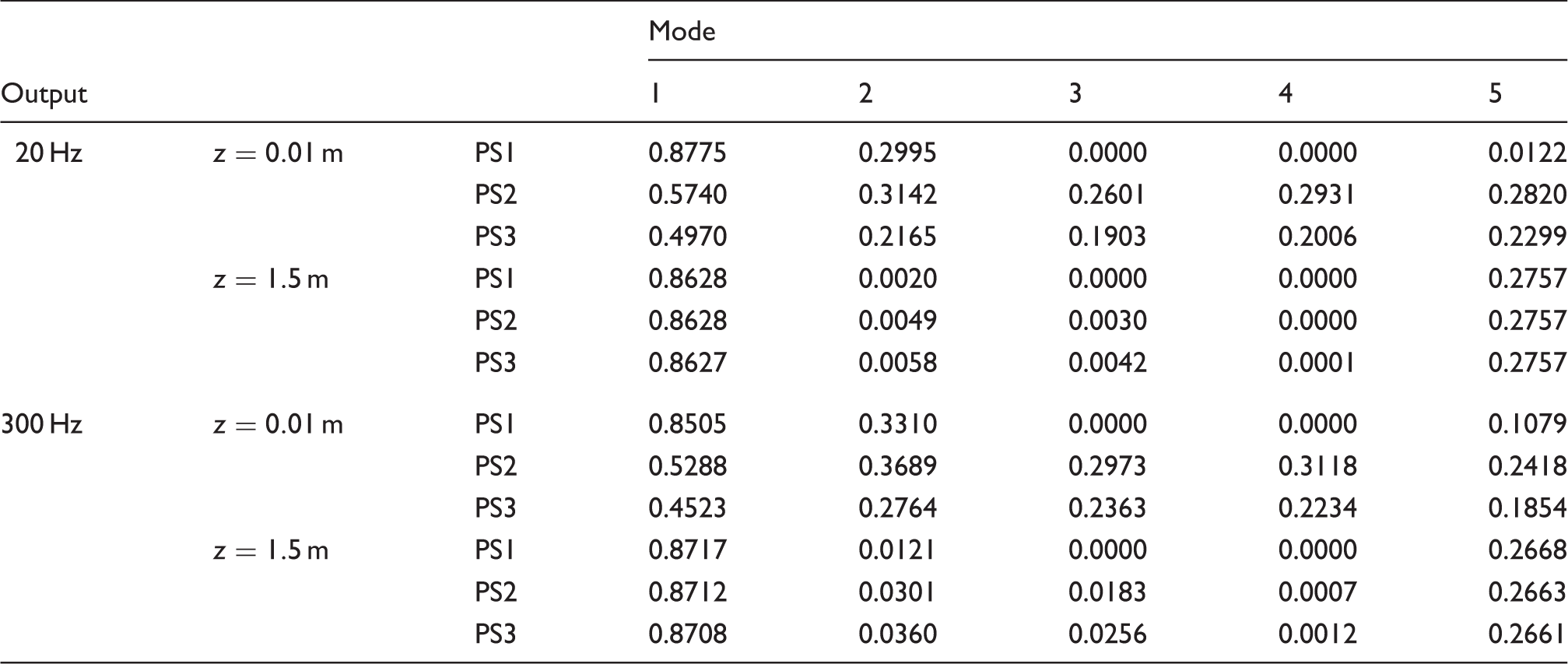
Modal observability measures of pressure outputs at PS1, PS2, and PS3.
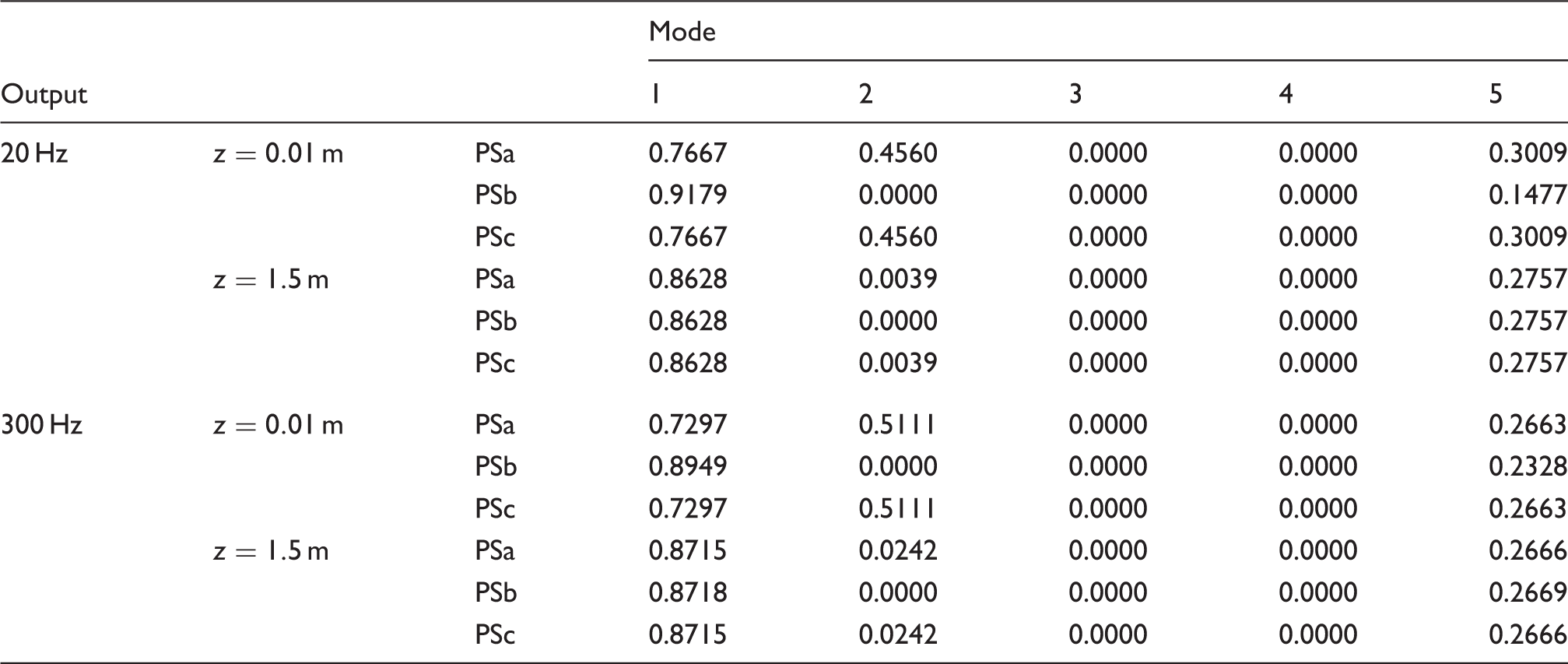
Modal observability measures of pressure outputs at PSa, PSb, and PSc.
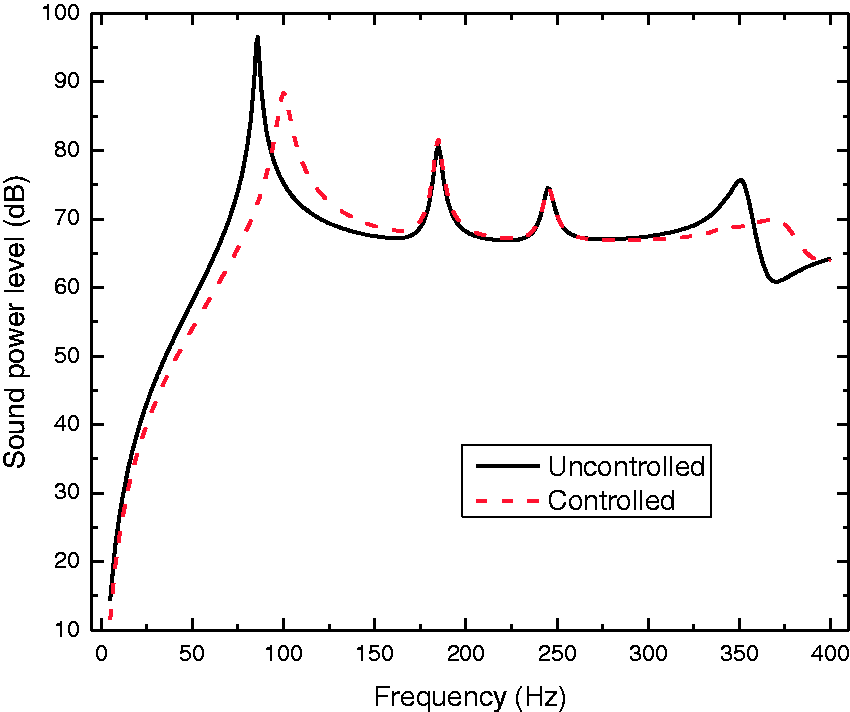
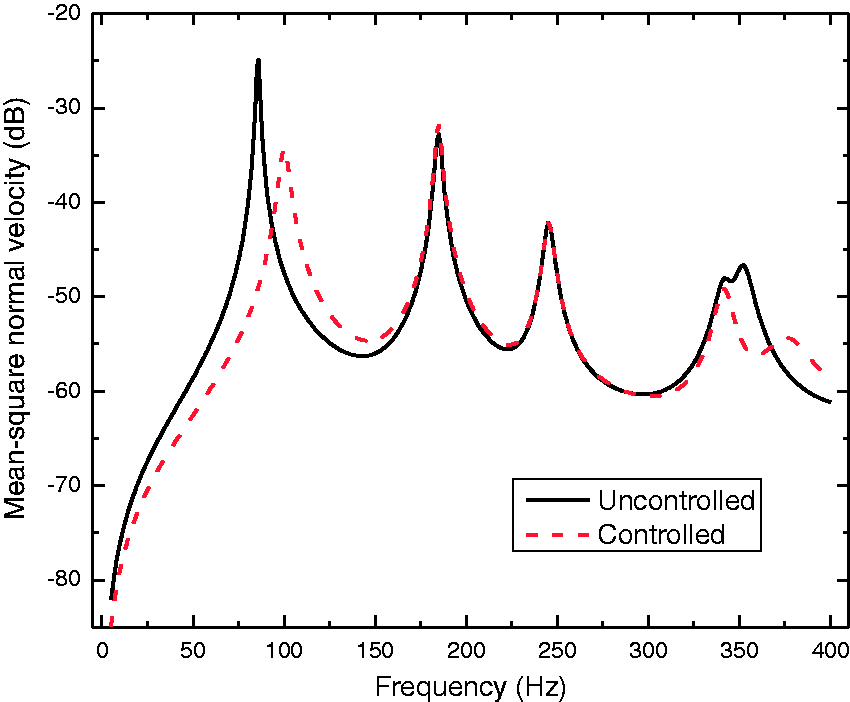
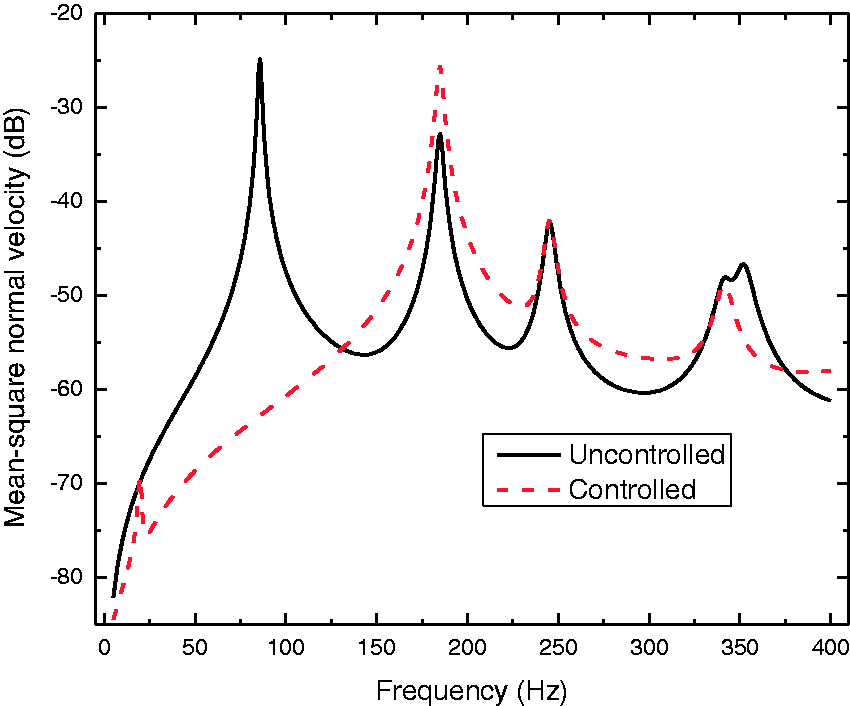
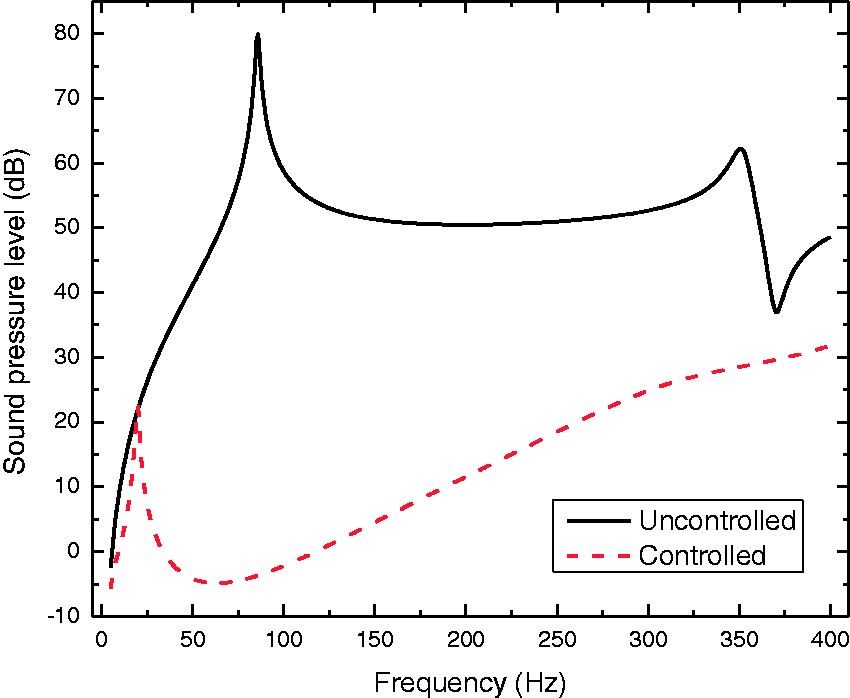
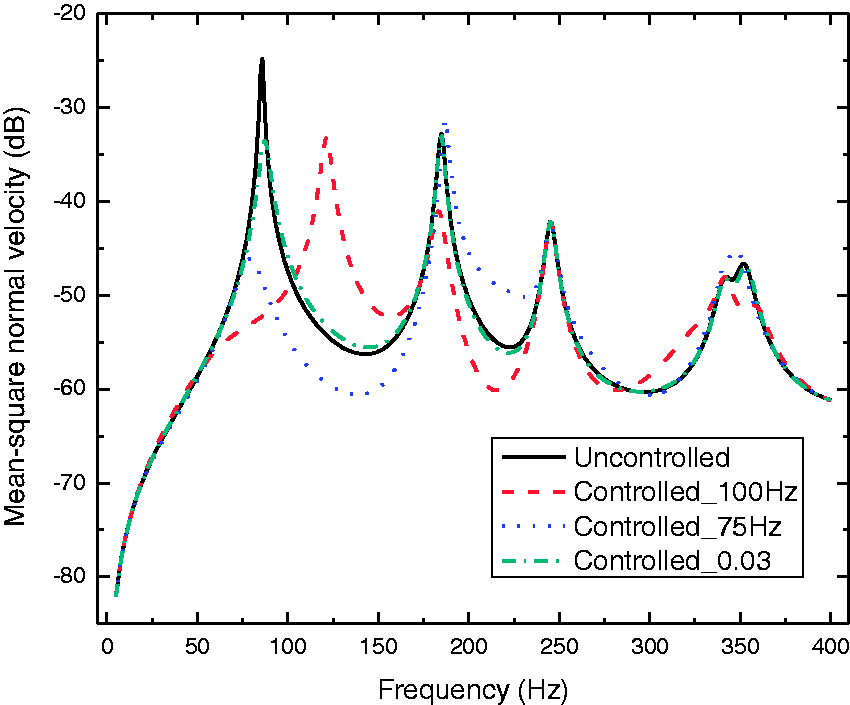
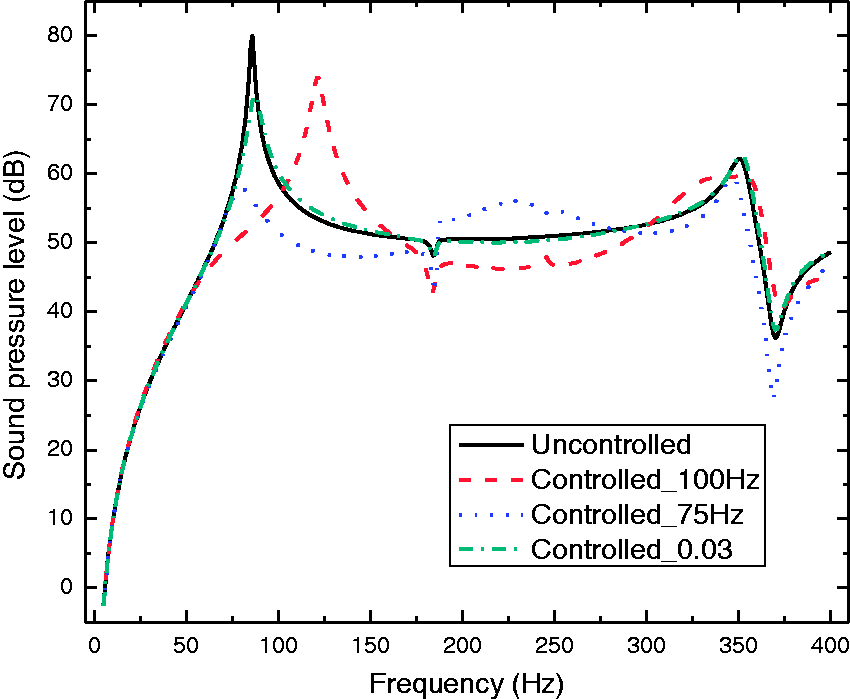
First, it is desired to modify the first modal frequency from 86 Hz to 100 Hz and the fifth modal frequency from 352 Hz to 375 Hz and to modify the first modal damping ratio from 0.0099 to 0.03 and the fifth modal damping ratio from 0.0147 to 0.03 by active control with inputs (ub, uc) and outputs (PSa, PSb, PSc) of The 2-norm of the complex gain matrix of inputs (ub, uc) and outputs (PSa, PSb, PSc). Sound power level before and after control using pressure feedback with inputs (ub, uc) and outputs (PSa, PSb, PSc) for controlling mode 1 and mode 5. Mean-square normal velocity level before and after control using pressure feedback with inputs (ub, uc) and outputs (PSa, PSb, PSc) for controlling mode 1 and mode 5. Sound pressure level at field point 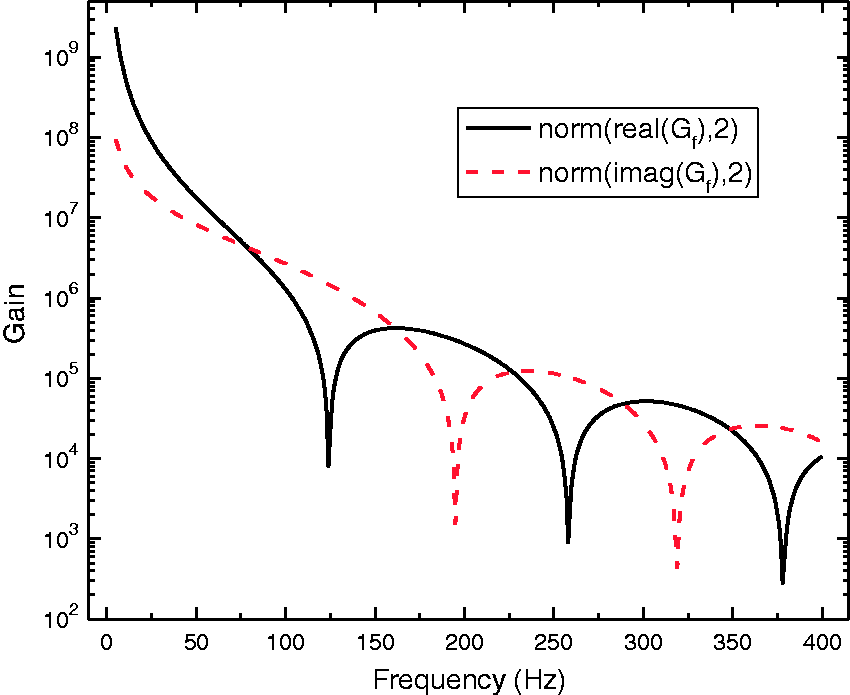
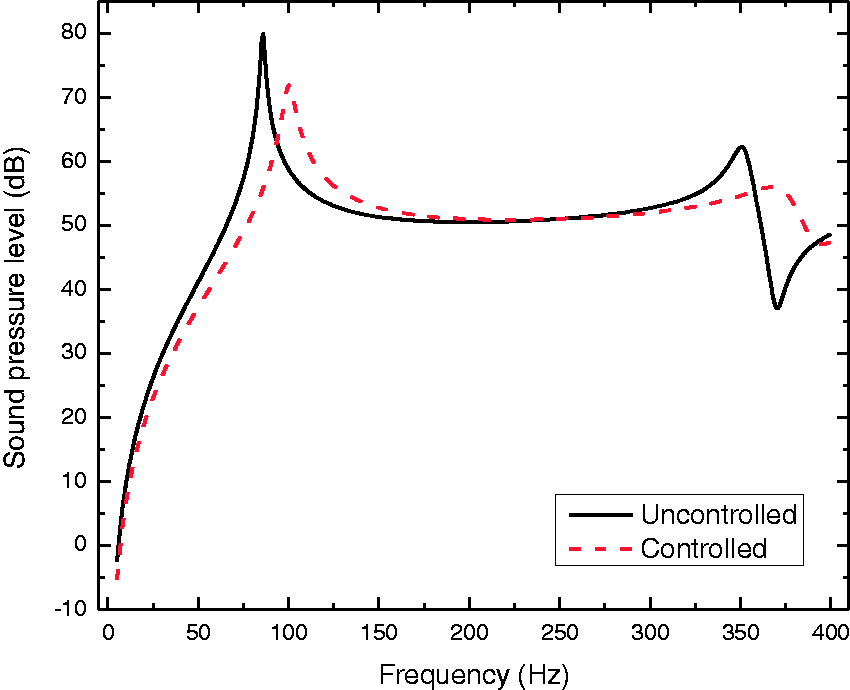
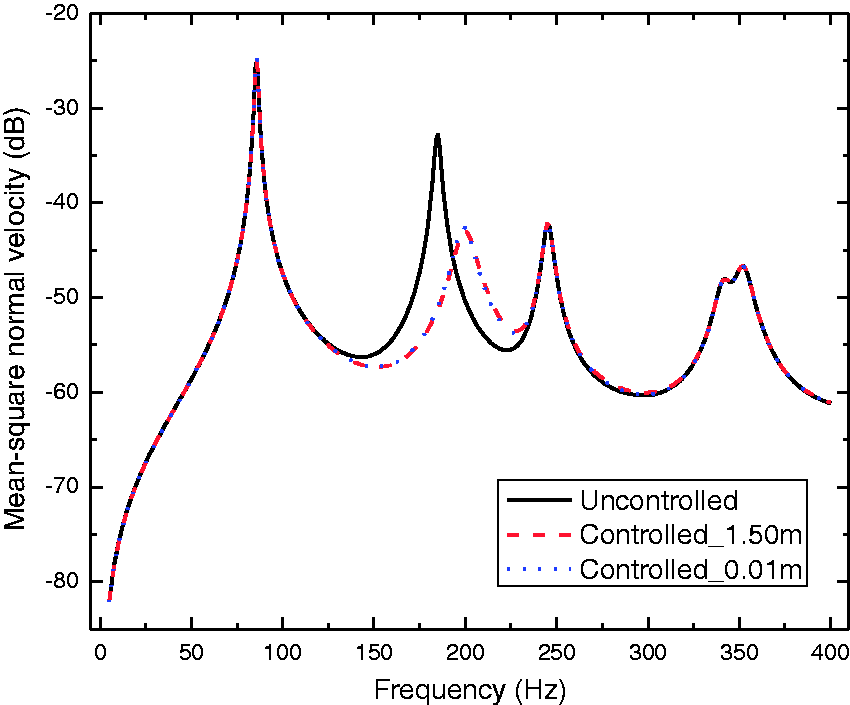
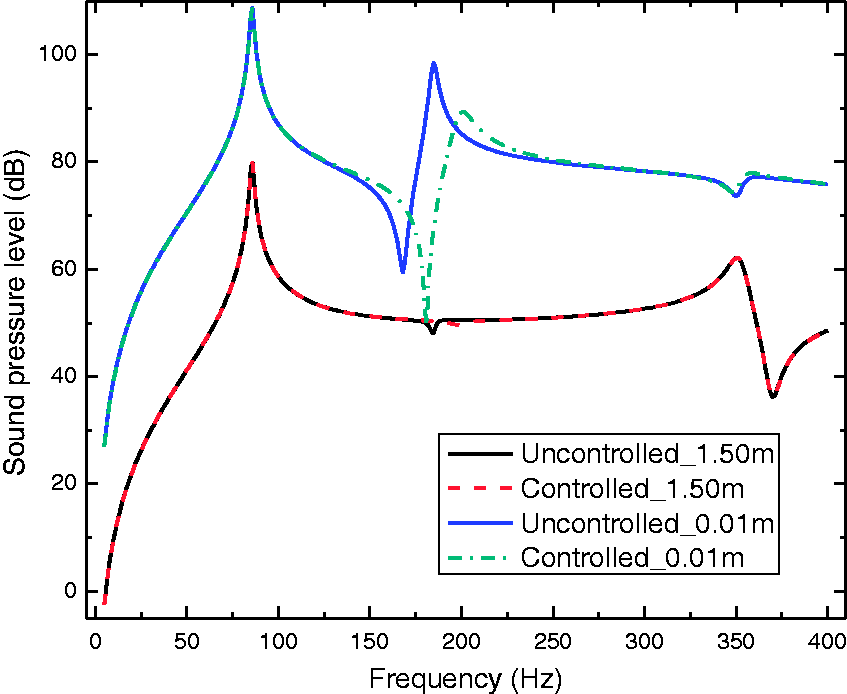
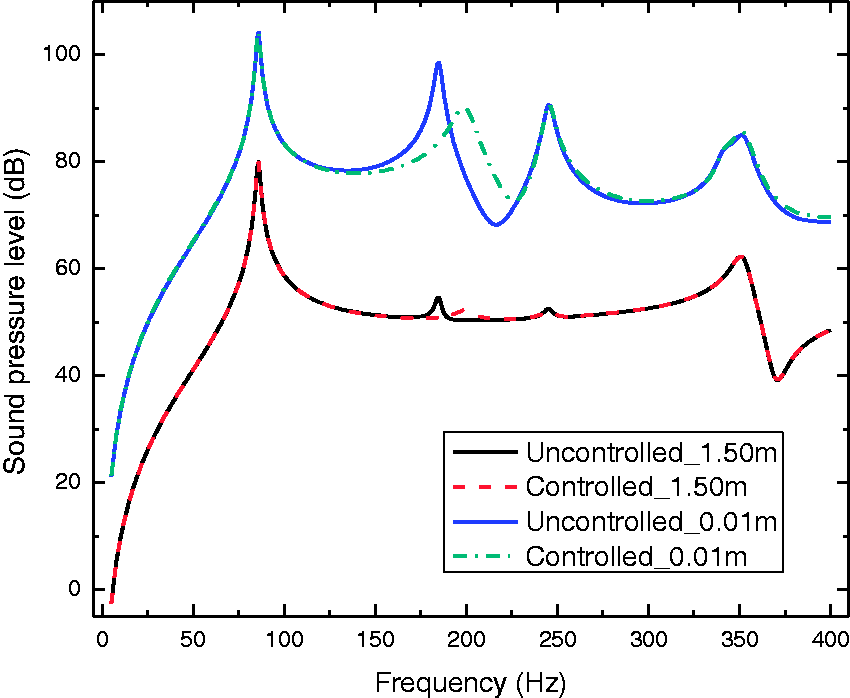
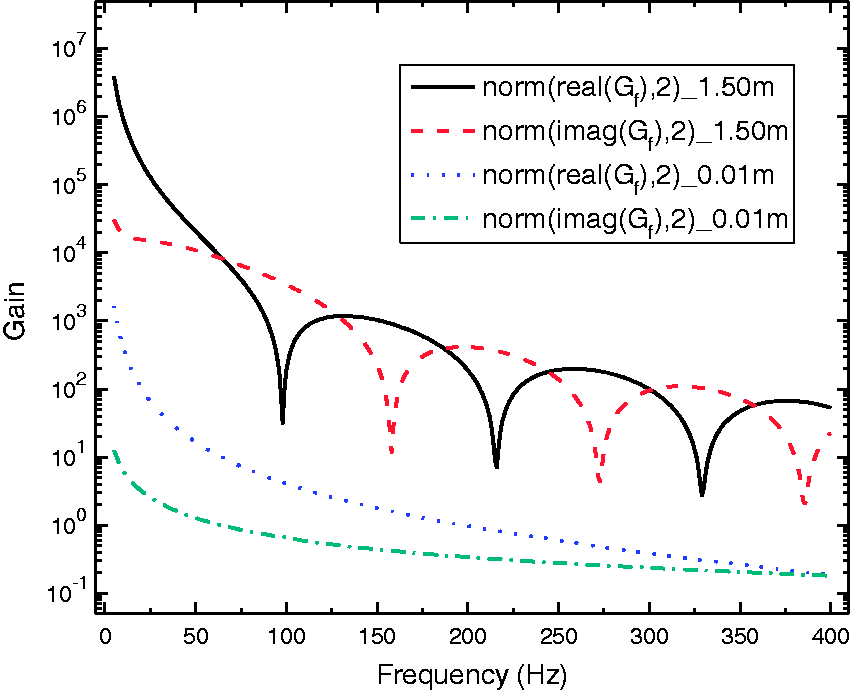
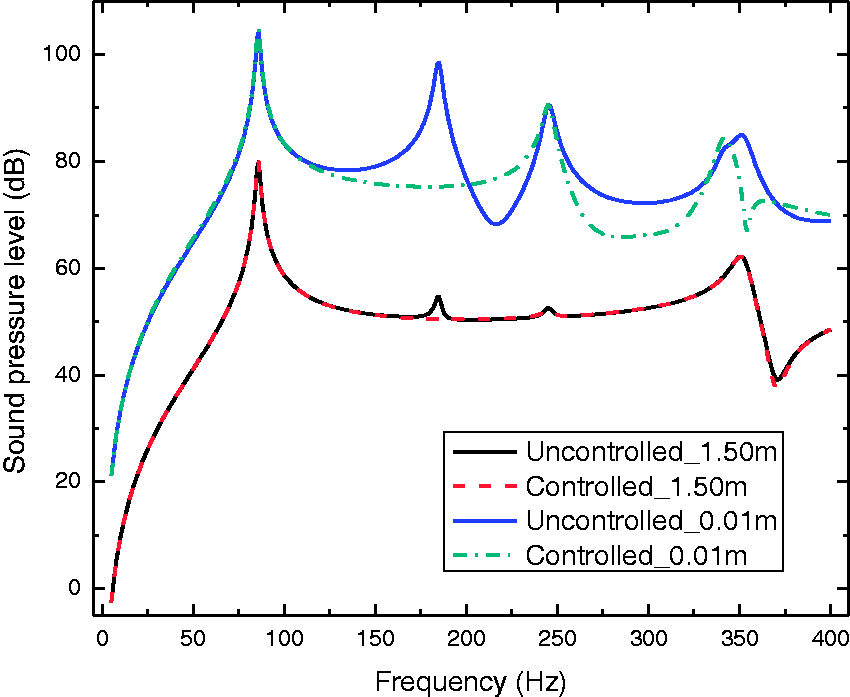
Second, it is desired to modify the second modal frequency from 185 Hz to 200 Hz, and the second modal damping ratio from 0.01 to 0.03 by active control with inputs (ua, uc) and outputs (PS1, PS2, PS3). To investigate the effect of the distance between the microphone and the plate on the sound pressure feedback control, (PS1, PS2, PS3) with Sound power level before and after control using pressure feedback with inputs (ua, uc) and outputs (PS1, PS2, PS3) for controlling mode 2. Mean-square normal velocity level before and after control using pressure feedback with inputs (ua, uc) and outputs (PS1, PS2, PS3) for controlling mode 2. Sound pressure level at field point Sound pressure level at field point The 2-norms of the complex gain matrices of inputs (ua, uc) and outputs (PS1, PS2, PS3) with different distances of 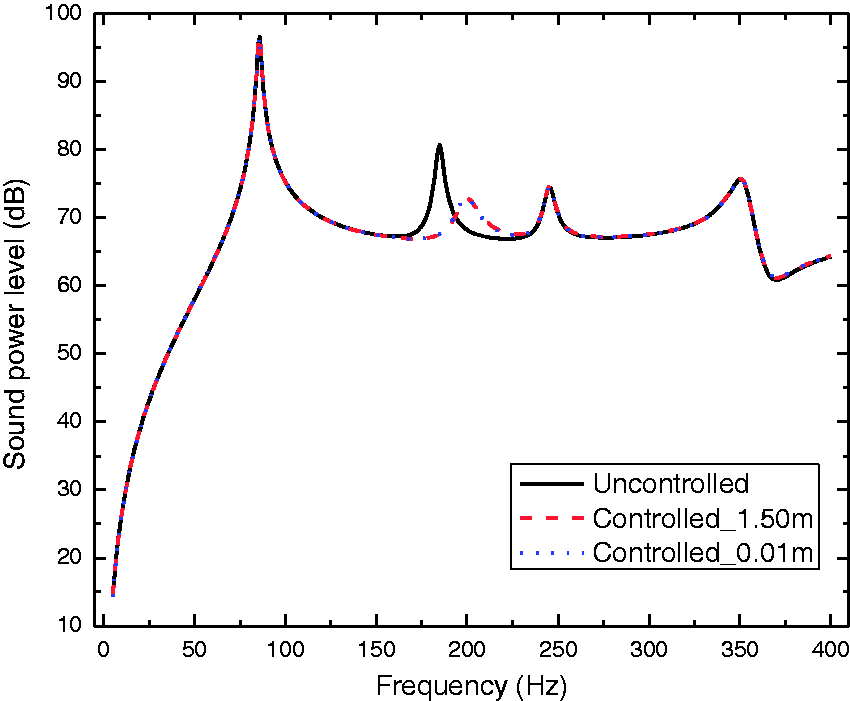
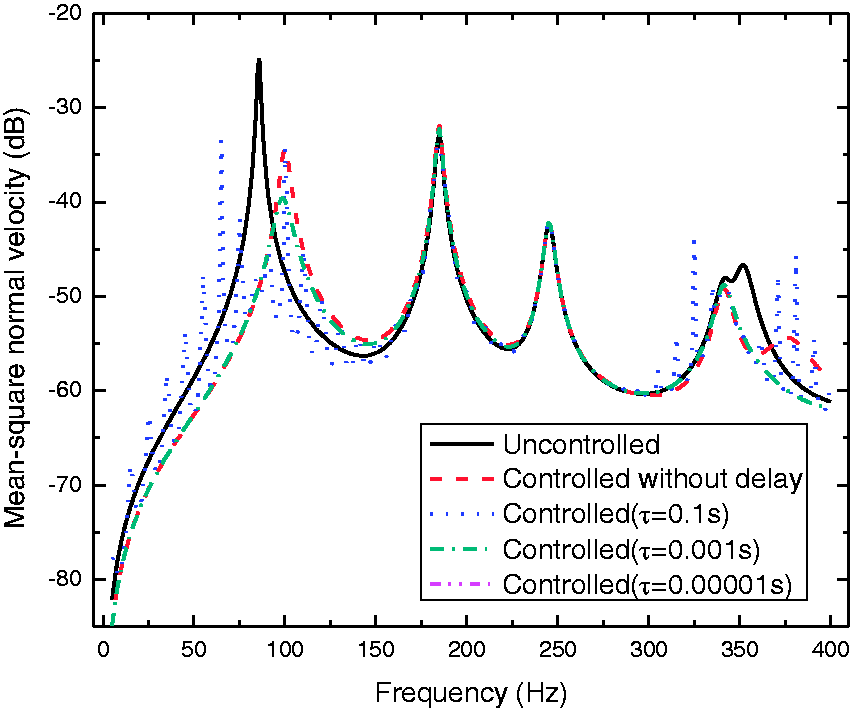
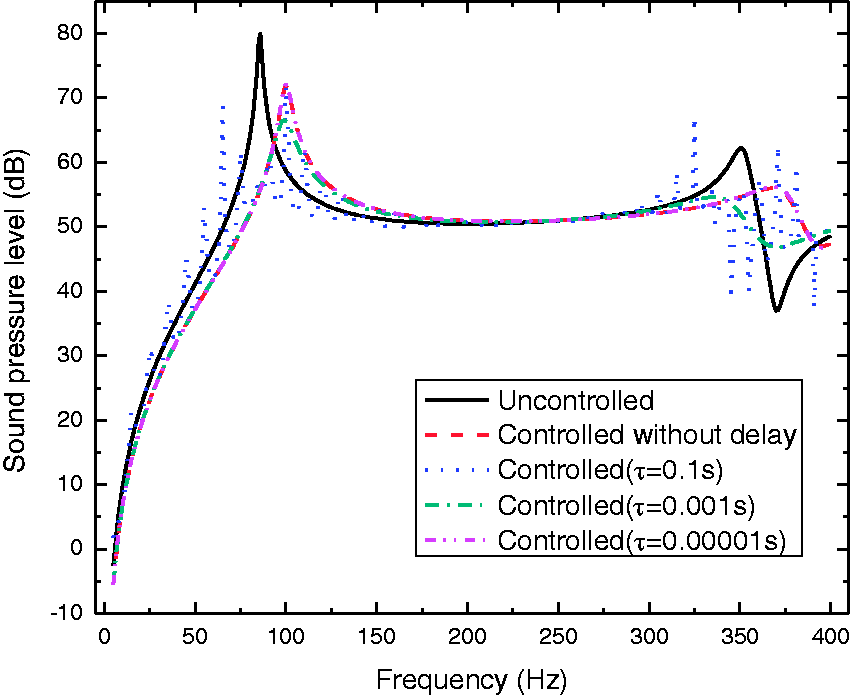
Third, to see the effect of delays, Sound power level with control delay using pressure feedback with inputs (ub, uc) and outputs (PSa, PSb, PSc) for controlling mode 1 and mode 5. Mean-square normal velocity level with control delay using pressure feedback with inputs (ub, uc) and outputs (PSa, PSb, PSc) for controlling mode 1 and mode 5. Sound pressure level at field point 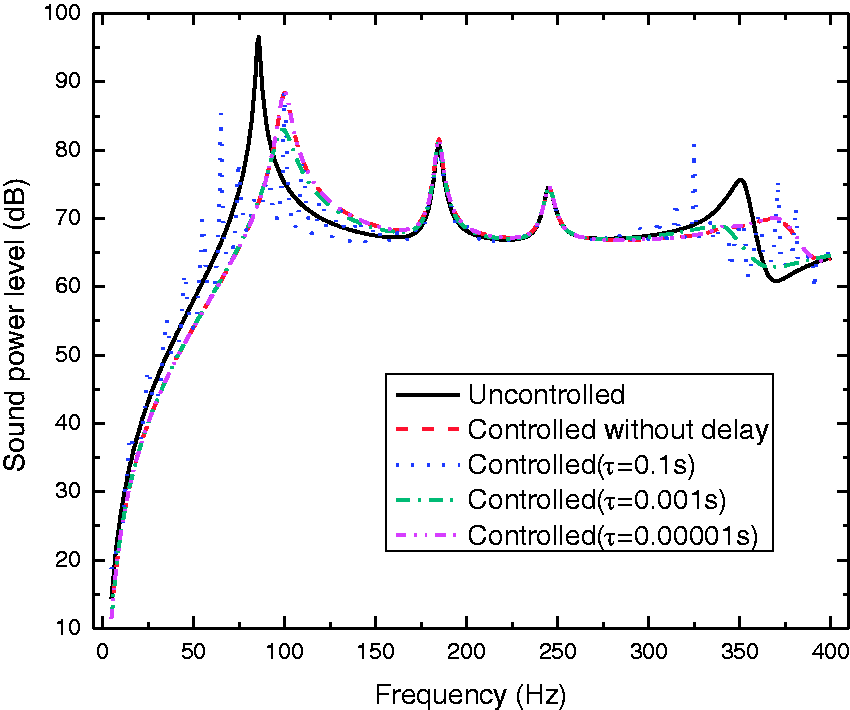
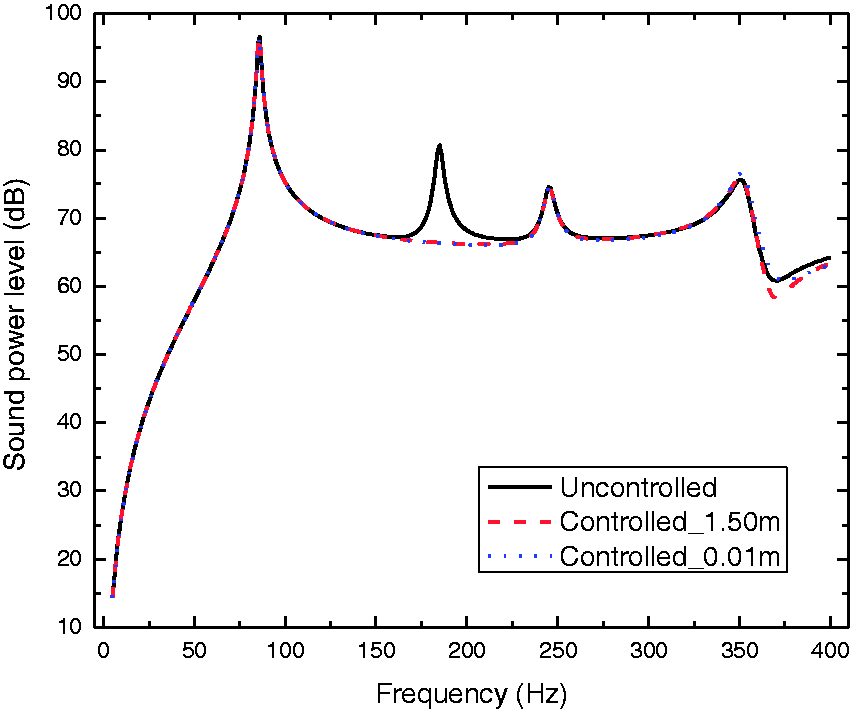
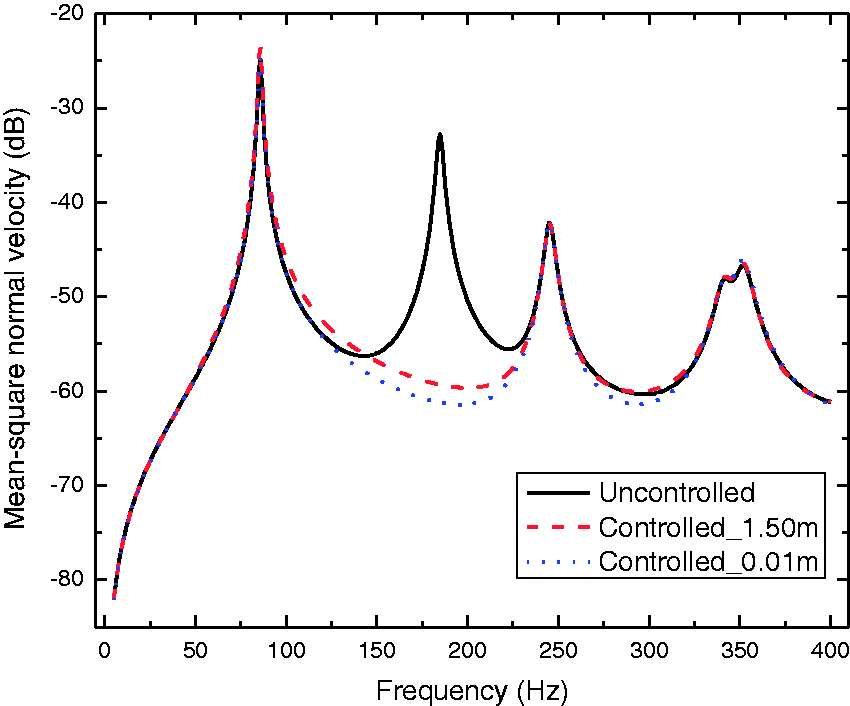
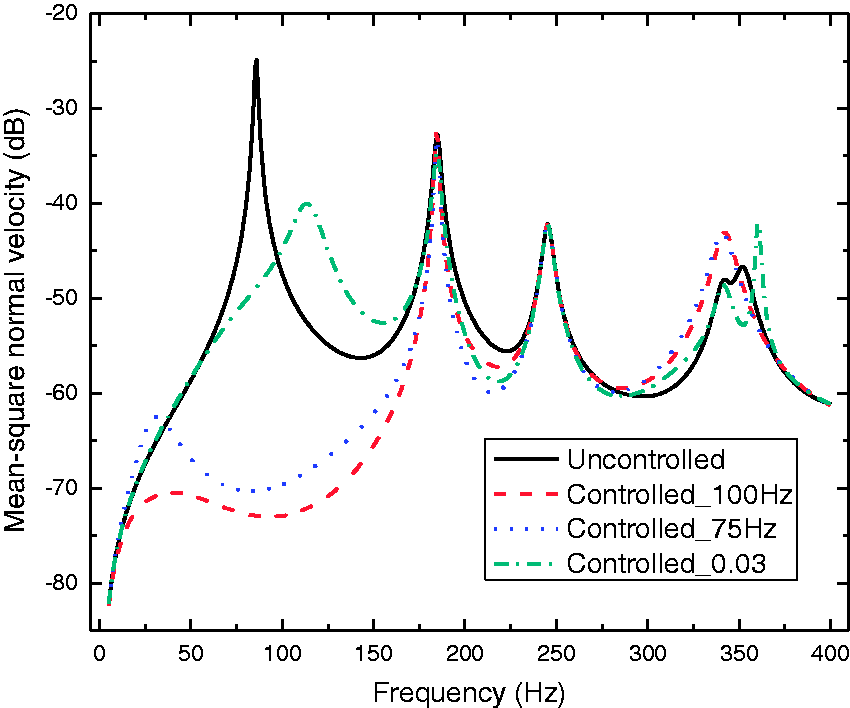
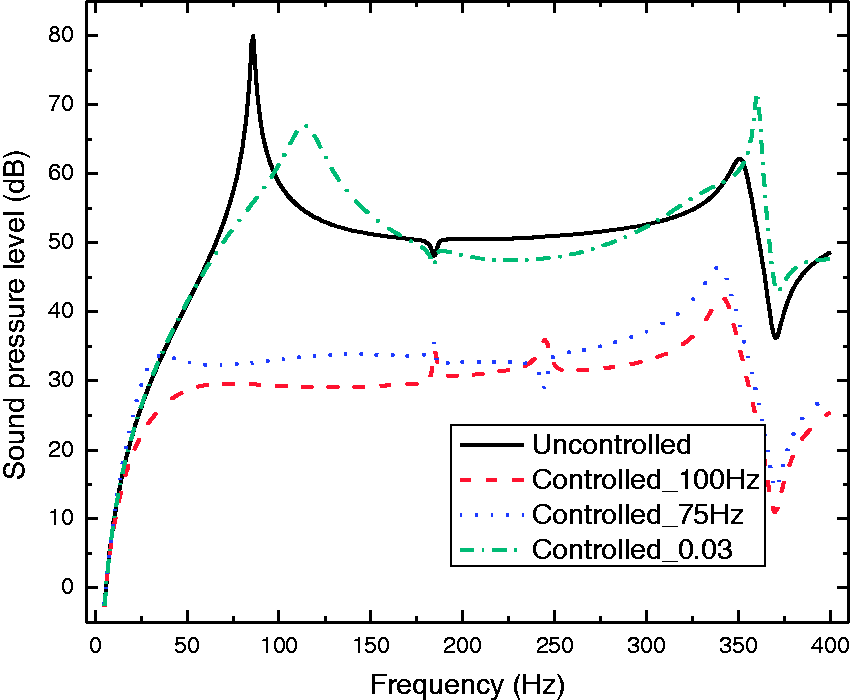
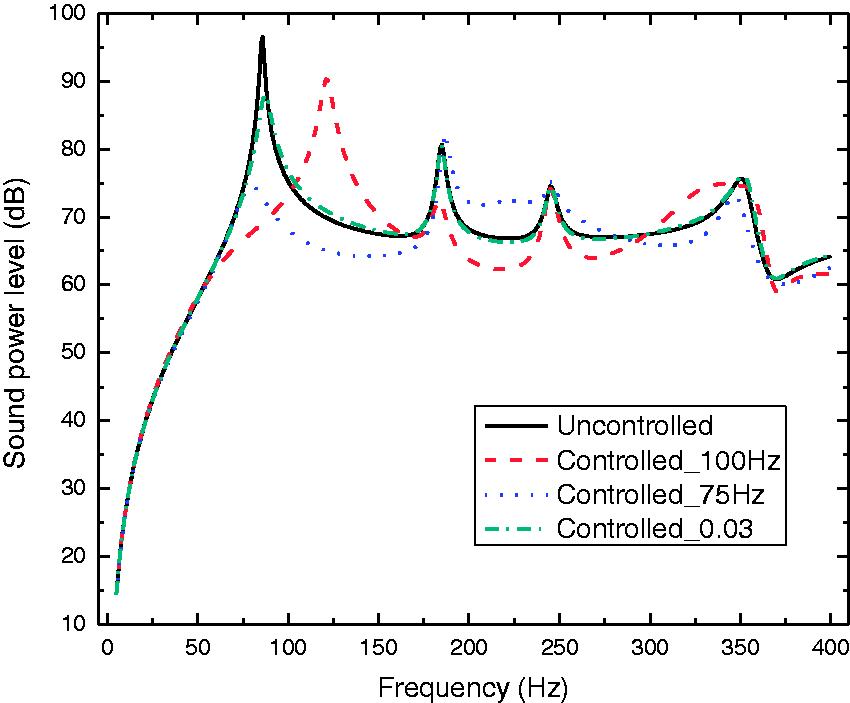
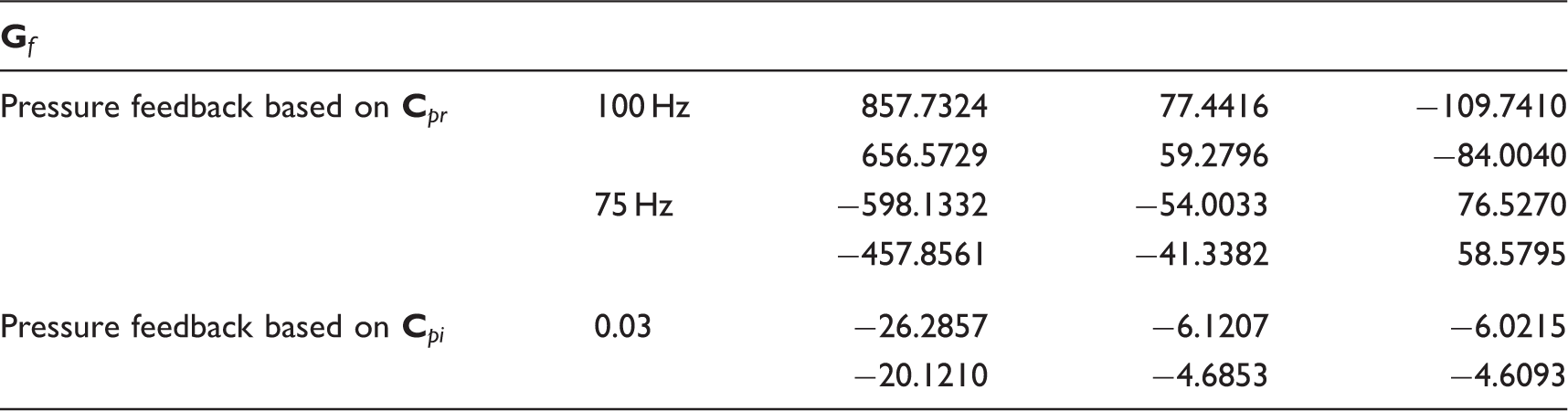
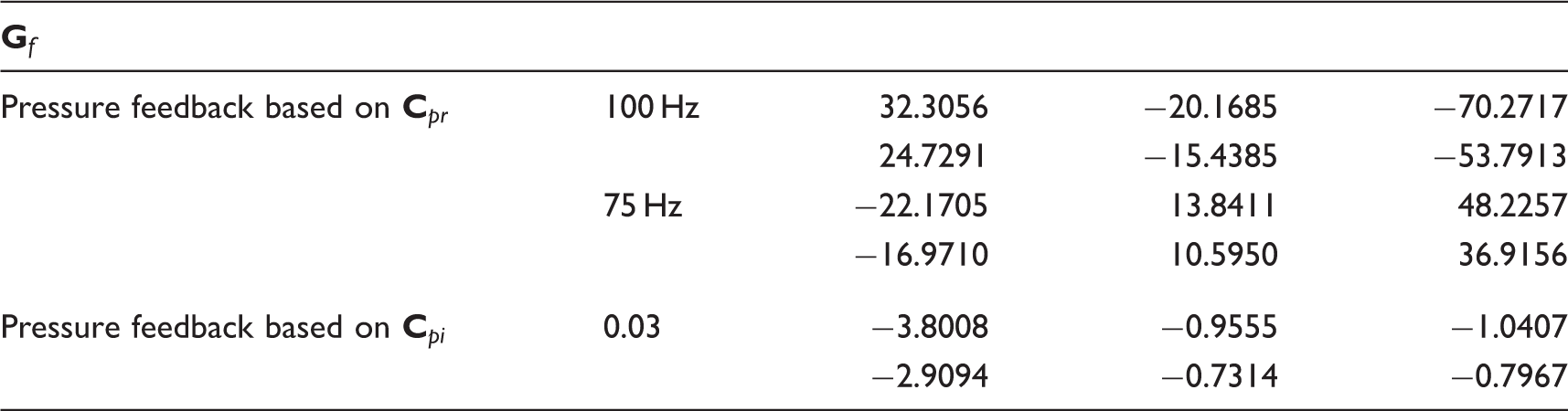
Fourth, from Figures 2 and 10, it can be seen that the gains are decreasing with increasing frequency. Thus, for practical purposes, it is attempted to use complex gains at 20 Hz for the whole frequency range for the above two control cases. That is, the pressure influence coefficient matrices at 20 Hz are used to get Sound power level before and after control using pressure feedback with inputs (ub, uc) and outputs (PSa, PSb, PSc) for controlling mode 1 and mode 5 with complex gains at 20 Hz. Mean-square normal velocity level before and after control using pressure feedback with inputs (ub, uc) and outputs (PSa, PSb, PSc) for controlling mode 1 and mode 5 with complex gains at 20 Hz. Sound pressure level at field point Sound power level before and after control using pressure feedback with inputs (ua, uc) and outputs (PS1, PS2, PS3) for controlling mode 2 with complex gains at 20 Hz. Mean-square normal velocity level before and after control using pressure feedback with inputs (ua, uc) and outputs (PS1, PS2, PS3) for controlling mode 2 with complex gains at 20 Hz. Sound pressure level at field point Feedback gain matrix (20 Hz) of pressure feedback control for mode 1 and mode 5. Feedback gain matrix (20 Hz) of pressure feedback control for mode 2.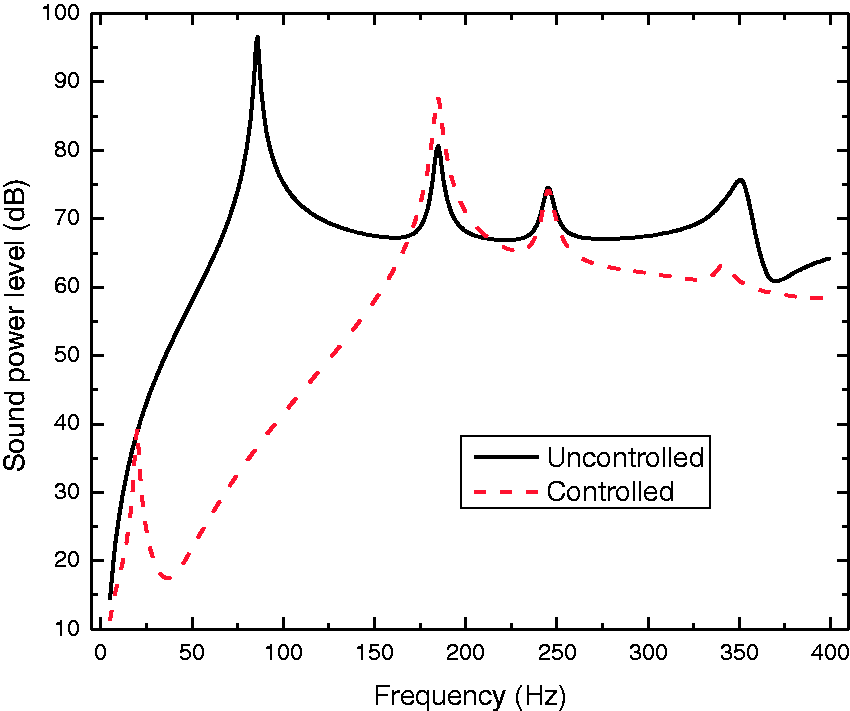


Finally, it is attempted to use real control gain for sound pressure feedback with inputs (u1, u2) and outputs (PS1, PS2, PS3) of Sound power level before and after control using pressure feedback (20 Hz). Mean-square normal velocity level before and after control using pressure feedback (20 Hz). Sound pressure level at field point Sound power level before and after control using pressure feedback (86 Hz). Mean-square normal velocity level before and after control using pressure feedback (86 Hz). Sound pressure level at field point Feedback gain matrix of pressure feedback (20 Hz). Feedback gain matrix of pressure feedback (86 Hz).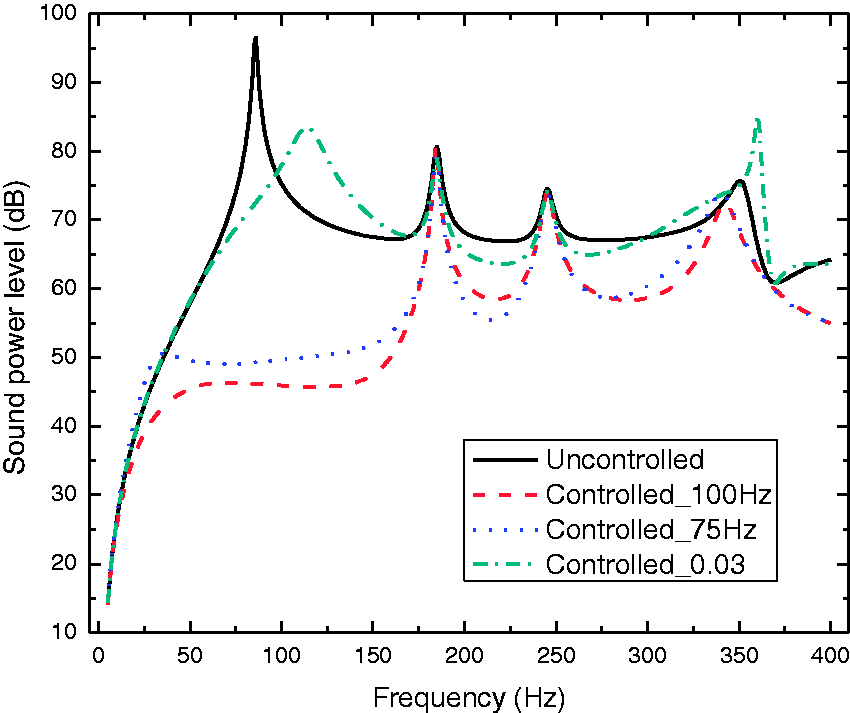
Conclusions
In this paper, the active control of vibro-acoustic response using sound pressure feedback has been studied. An output feedback approach based on sound pressure inputs has been proposed and the feedback gains determined by assigning poles. The control performance of structural vibration and acoustic radiation of a baffled plate has been numerically evaluated based on the proposed method. Numerical simulations of the active control with complex gains confirm the excellent realization of the pole assignment. Numerical results also show that the pressure feedback control using a constant gain at a lower frequency may result in large reduction in vibro-acoustic response in a wide frequency band but may cause negative effect on uncontrolled modes. Finally, it should be noted that the results presented here are theoretical and numerical in nature and the associated practical problems related to implementation, applications and performances of the method are left for future research and investigation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to gratefully acknowledge the support of the Fundamental Research Funds for the Key Laboratory of Department of Education of Liaoning Province under Grant No. LZ2014004 and the Funds of Science and Technology on Underwater Test and Control Laboratory under Grant No. 9140C260101130C26095.