
Abstract
This article deals with fault detection of an alternator based on vibration signals using wavelet transform and least square support vector machine. Firstly, the noise in the vibration signal is removed using wavelet denoising. The denoised signals are then analysed using discrete wavelet transform with Daubechies mother wavelet. Several statistical features are then extracted from discrete wavelet transform coefficients of the signals. Finally, least square support vector machine is employed to detect and classify the different alternator conditions. The results show that the detection accuracy reached 90.48%. Hence, the proposed procedure is capable of detecting the alternator faults, and thus can be used for practical applications.
Keywords
Introduction
Automatic and intelligent fault diagnosis of automobiles has widely been developed. 1 One of the main tasks of electronic control unit (ECU) in automobiles is fault detection. 2 Electric parts of automobile such as battery, alternator, spark plugs, etc are very sensitive so that fault generation in them causes to stop the automobile and impose undesirable costs. Faults of electric components constitute a huge part of automobile faults and are the main reasons for breakdown. 3 Thus, investigation of fault diagnosis of electric components is significantly important and several researchers have addressed this issue. Abbas and Ferri 4 have reported an intelligent strategic design for fault detection of electric and electronic systems of automobiles, where some performance parameters of electric components like electric current have been used for condition monitoring. He et al. 5 have performed fault detection and useful life prediction of Lithium batteries in automobiles. They have considered the battery capacity as the main parameter, and have used Dempster–Shafer and Bayesian theories to study changes in the battery capacity. Feng et al. 6 have performed fault detection of electric actuators. In a similar research, Wang et al. 7 have implemented fault diagnosis and prognosis of a battery using relevance vectors and performance parameters.
An alternator operates based on the principle of electromagnetic induction and is one of the most important electric components in an automobile, supplying the electricity needed for running the engine. Hence alternator fault detection has been extensively addressed by researchers. 3 Prashad 8 has performed detection and classification of bearing fault of alternators. Xiao et al. 9 have implemented fault diagnosis of vehicle alternator using fuzzy neural network. Hashemi et al. 10 have addressed fault diagnosis of an automobile alternator using determination of a variable threshold for performance parameters. Various patents on detection of mechanical and electrical faults of alternators have also been recorded.11–14
The main advantages of the methods reported include their simplicity and fast response for fault detection of alternators and reduced computational cost. Some of the disadvantages associated with these methods include low accuracy and lack of comprehensiveness limiting their efficiency and good performance. Moreover, these methods cannot diagnose mechanical faults, because they use performance parameters of alternators based on current and voltage and there is no information on mechanical condition and faults of alternators contained in these parameters. Therefore, it is essential to develop an intelligent method to overcome such shortcomings. In this article, vibration signals are used for fault diagnosis of alternators, allowing detection of mechanical faults of alternators as well.
Multi resolution signal processing is one of the most effective strategies for noise elimination. In this context, wavelet analysis is a very common and helpful method in vibration signals processing.
Wavelet denoising is a tool for shielding and reducing noise. In this article, firstly, wavelet denoising is used to reduce the noise in vibration signals. Then, denoised signals are transformed from time domain to time-frequency domain using discrete wavelet transform (DWT). Wavelet coefficients cannot be directly used as inputs to a classifier, so a pre-processing stage is essential to prepare data for the classifier. 15 Feature extraction 16 is used in this research for determination of useful data from vibration signals of the alternator. The extracted features are used as inputs to the classifier for signal identification and fault classification. Least square support vector machine (LS-SVM) is employed for fault detection and classification. LS-SVM is a widely used algorithm in many studies. LS-SVM is a reformulation to the standard SVM, where the optimum solution is obtained by solving a set of linear equations instead of solving the quadratic programming (QP) problem. It is a powerful method in intelligent fault diagnosis of rotating machinery like alternators, induction motors, gearboxes and pumps.
In the current research, fault detection of an engine alternator has been conducted. This research has two novelties. One is on detection and classification of mechanical faults of the alternator. Due to high speeds of alternators, defects such as imbalance and crack can be hazardous to their health.
17
Another novelty is in the use of vibration signals to fault detection of alternator which has rarely been addressed. In the previous studies, fault detection of alternator has more been based on performance parameters like electric current, voltage, etc.10,18,19 In the current research, vibration signals of an alternator are captured by an accelerometer for four conditions, namely, healthy (H), crack in rotor (CR), worn bearing (WB) and drive shaft imbalance (DSI). Wavelet denoising and DWT are employed. DWT is one of the most effective methods in signal processing for fault detection.20,21 Feature extraction and LS-SVM methods are used to develop an intelligent procedure for fault detection. Figure 1 represents the fault diagnosis procedure in this research for an alternator.
Flowchart of the proposed method.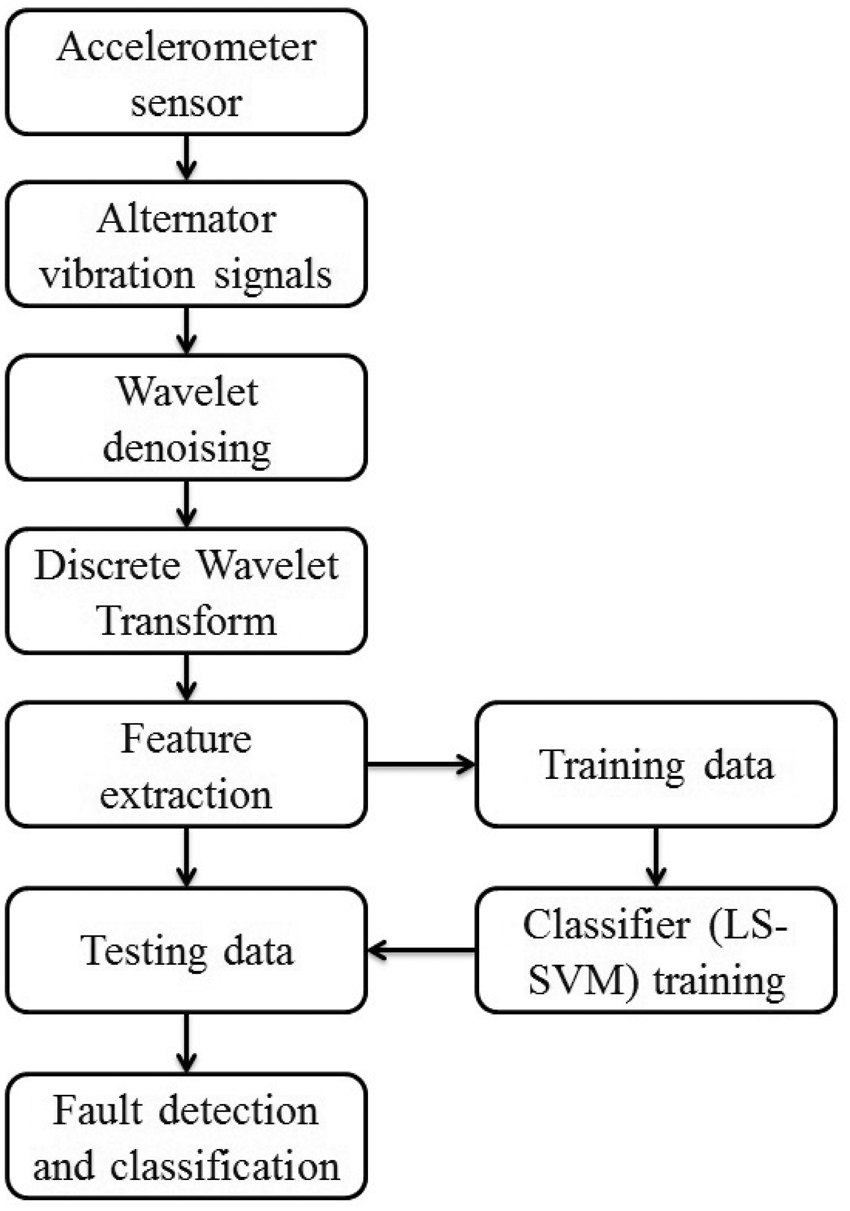
Materials and methods
Experimental setup
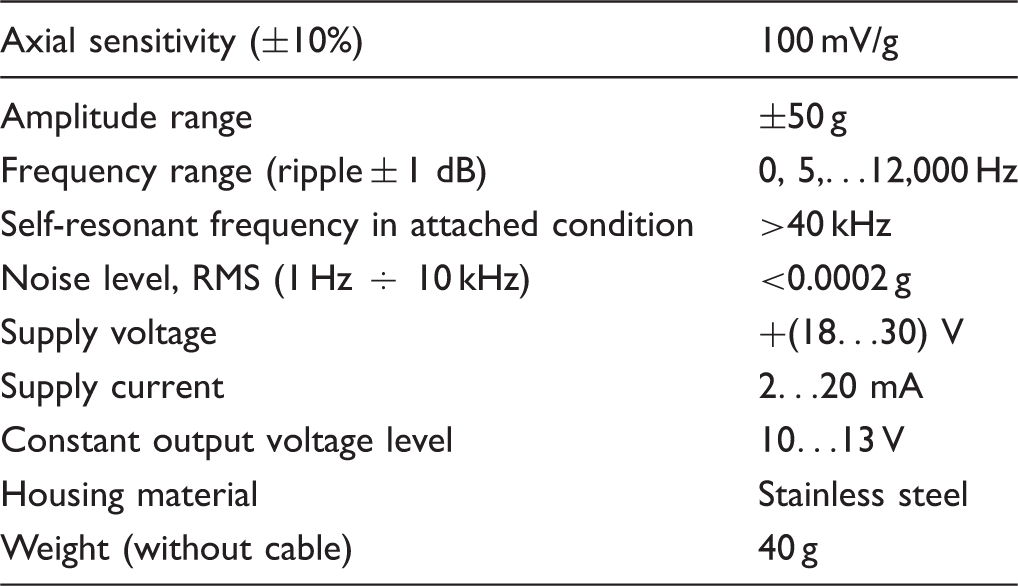
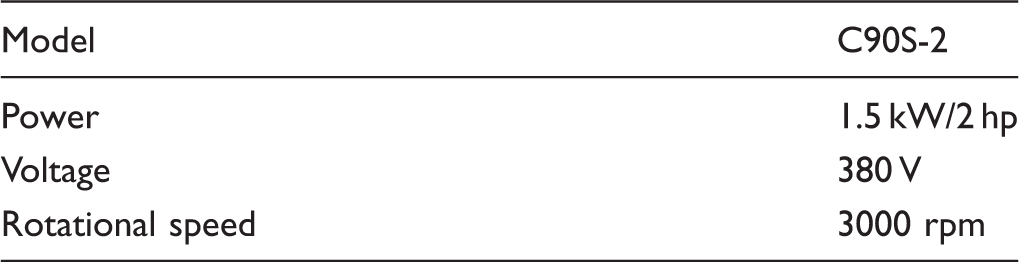
The experimental setup consists of an electromotor, inverter, alternator and shock absorber under the base of test bed. To collect vibration data, an accelerometer, amplifier and data acquisition unit were used. The alternator was rotated by the electromotor, which was controlled by the inverter. The accelerometer was mounted vertically on the alternator body. Figure 2 shows the experimental setup used in this research. Tables 1 and 2 show specifications of the accelerometer and electromotor used.
Experimental setup. Specifications of the accelerometer (Global Test AP 98-100). Specifications of the electromotor and inverter.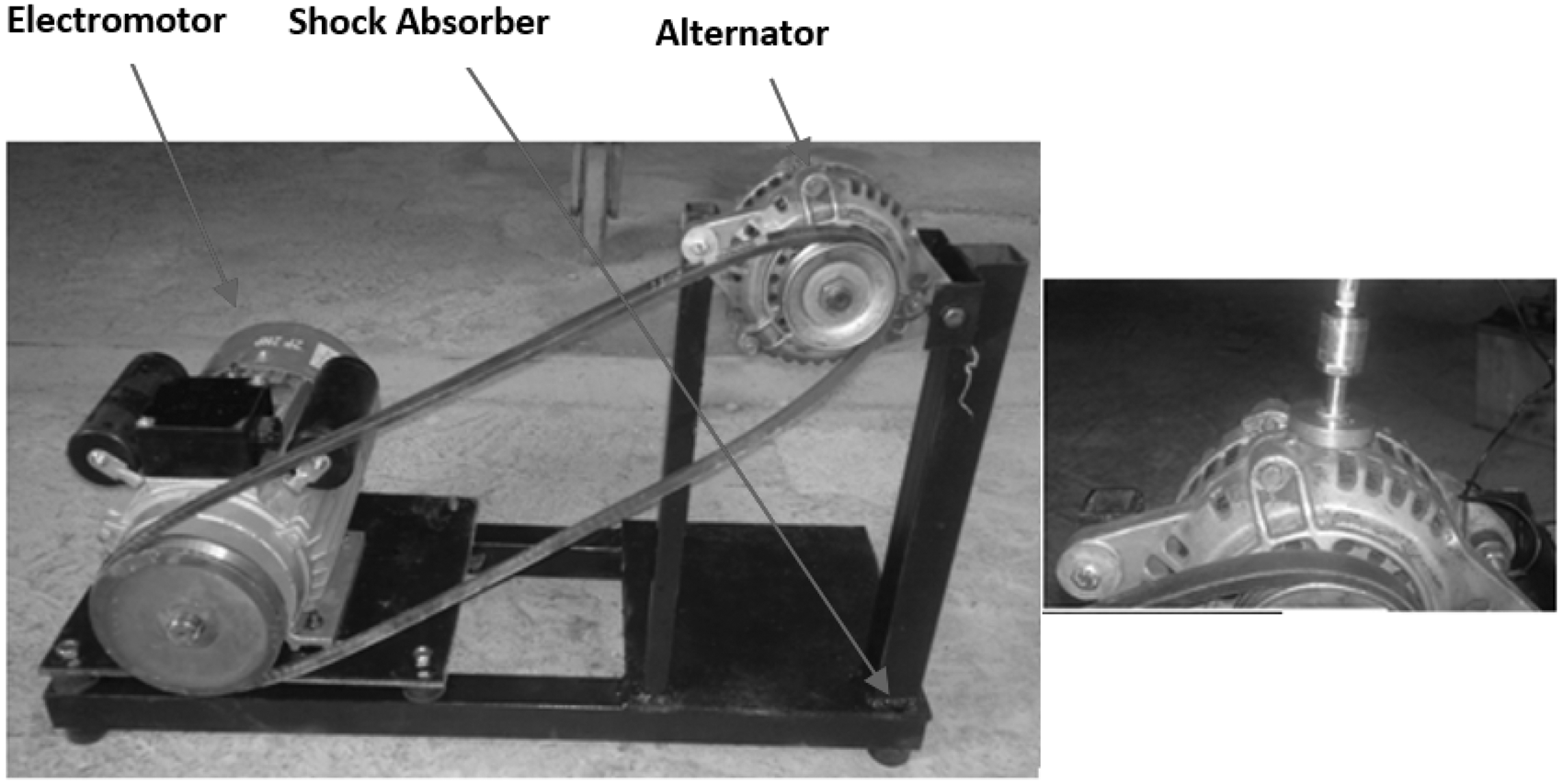
As mentioned before, four different alternator conditions were studied in this research, namely, healthy (H), crack in rotor (CR), worn bearing (WB) and drive shaft imbalance (DSI), and these illustrated in Figure 3. For each condition, vibration signals were collected from the system under study with a sampling rate of 8192 Hz. The duration of each sample was 1 s, and 140 samples were obtained for each condition of the alternator.
The alternator faults considered: (a) H, (b) CR, (c) WB and (d) DSI.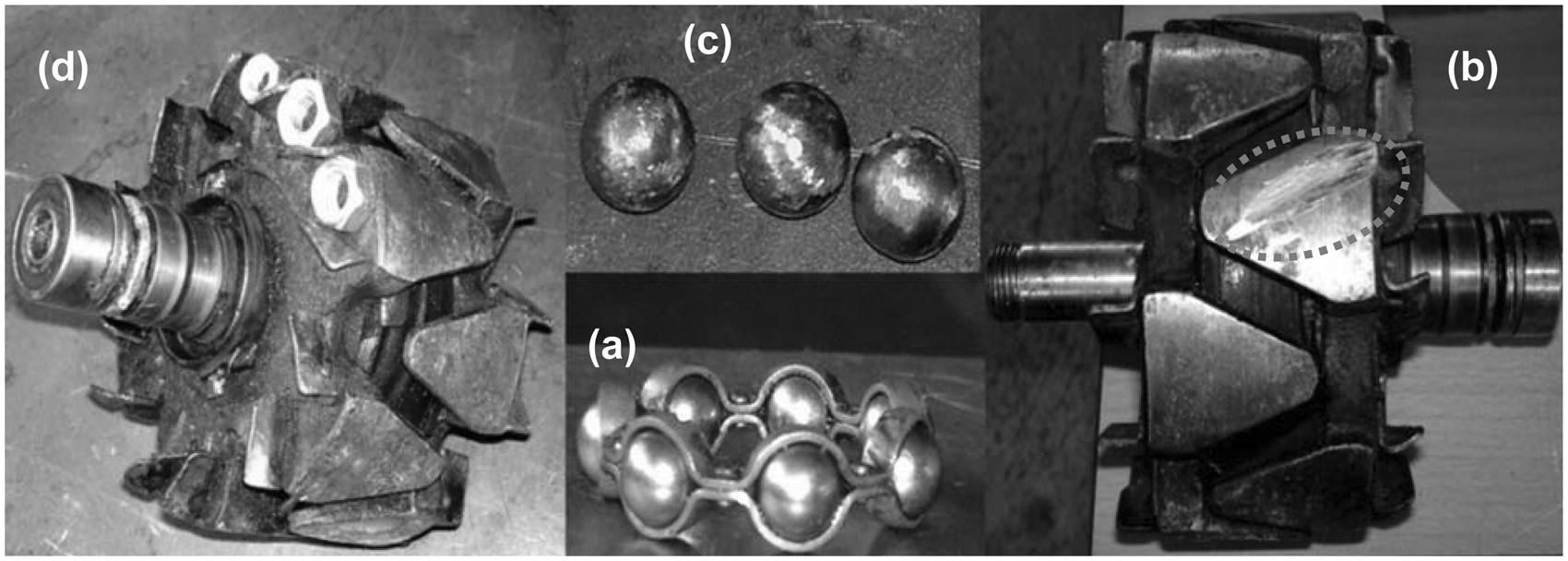
Signal processing
Acoustic and vibration data carry significant and useful information about the condition of a machine. However, measurement noise in time domain signals can challenge fault detection process. To resolve this problem it is required to transform the signals from time domain into frequency or time-frequency domain. There are several signal processing techniques that may be used. These include wavelet analysis, fast Fourier transform (FFT) and short-time Fourier transform (STFT).
In the present study, firstly the wavelet denosing method is used for reducing the measurement noise in the alternator signal. Then, the denoised signal is transformed from time domain into time-frequency domain using DWT.
Wavelet denoising
Although the vibration signals carry useful information about the machine condition, they usually include noise, which challenge the accuracy of fault diagnosis process.
22
Therefore, some parts of the alternator such as bearings can generate noise and degrade the quality of vibration signal.
23
Wavelet denoising is one of the most effective and efficient methods for noise removal from noisy signals with minimum side effects on important features such as signal details.
24
Wavelet denoising procedure proceeds in three steps:
25
Computation of the wavelet decomposition of the signals to a suitable level L. Selection of a threshold limit at each level for noise removal. Reconstruction of wavelet decompositions based on the generated signals in step 2. In fact, the resultant coefficients are used to reconstruct the denoised signal.
To reduce the noise effects on the vibration signals, wavelet denoising was performed using the function wden in MATLAB software. Also, soft thresholding method and Daubechies mother wavelet type 1 (db1)
25
and four decomposition levels were used in the denoising.
Discrete wavelet transform
Wavelet transform is divided into two categories, namely, continuous wavelet transform (CWT) and discrete wavelet transform (DWT). DWT is one of the most common methods in multi resolution signal processing which is suitable for processing non-stationary and transient signals. 26 The method allows transformation of time domain signals into time-frequency domain. Application of wavelet analysis allows both time and frequency features of a signal. 27
The continuous form of wavelet transform is represented by Wu and Chen
28

DWT is defined as
29


DWT is capable of providing the time and frequency information simultaneously, hence giving a time-frequency representation of the signal. DWT analysis reveals some aspects of data that other signal processing techniques miss like trends, breakdown points, discontinuities in higher derivatives, and self-similarity. This series of functions usually called mother wavelets, have different frequencies to deal with transient signals in different time intervals. In the current research, signal processing was conducted using the wavelet transform toolbox in MATLAB Software.
Feature extraction
Some features and their formulas used in this research.
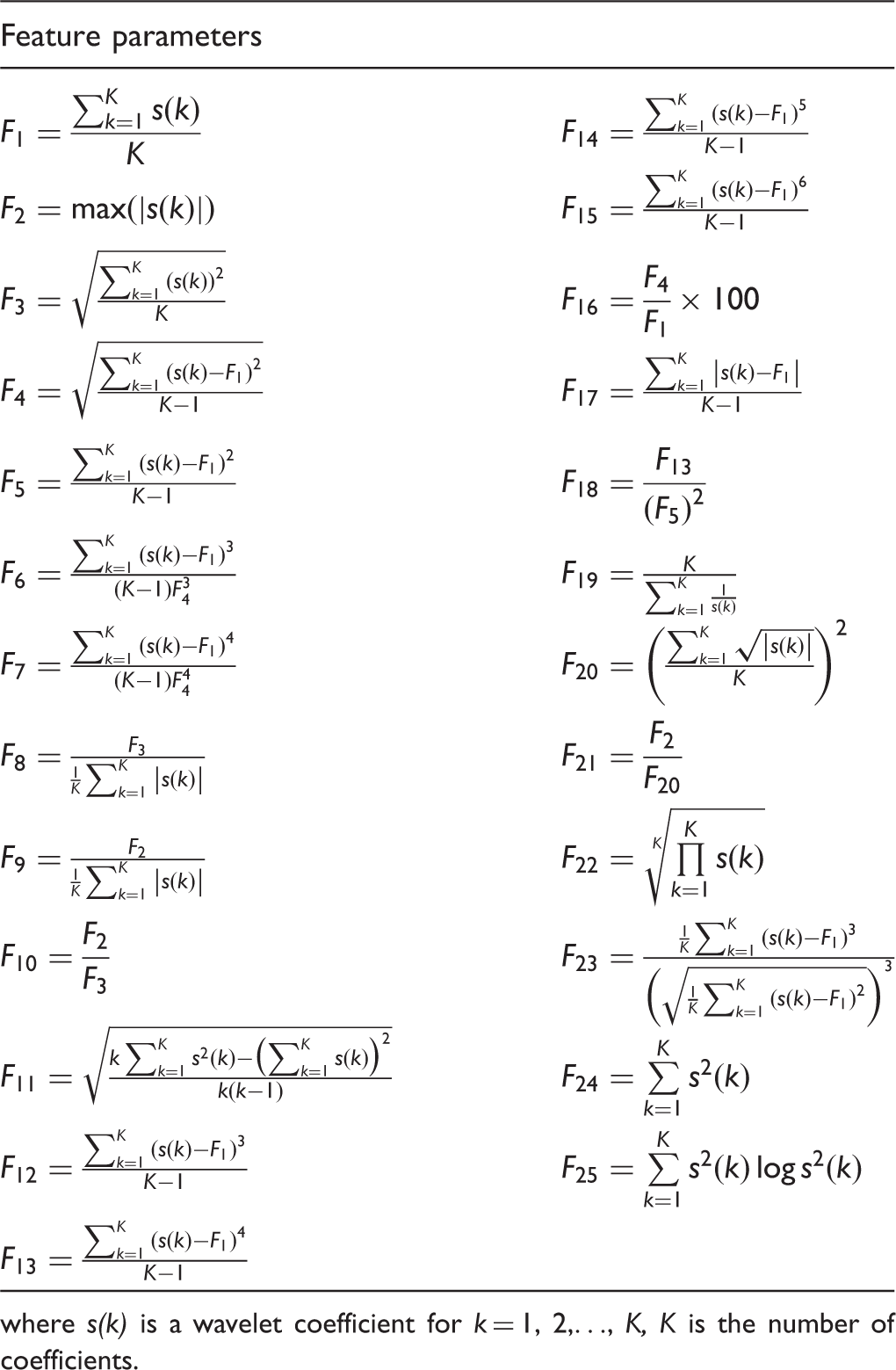
where s(k) is a wavelet coefficient for k = 1, 2,…, K, K is the number of coefficients.
Least square support vector machine
SVM is a promising machine learning method developed by Cortes and Vapnik. 31 It is highly capable of solving a variety of learning and function assessment problems. The method is based on structural risk minimization (SRM), and has good generalization property. SVM is widely used in many applications such as pattern classification, image identification, text detection and bioinformatics.
Let the training data be labelled as 

These can be combined into the following inequalities

The margin of a separating hyperplane is defined as
In the case where the data cannot be separated by hyperplane without errors, Vapnik proposed that by introducing positive slack variables 


The goal is to build a hyperplane that makes the smallest number of errors. Hence, the objective function becomes

Suppose the data is converted to a higher dimension space (feature space) using a mapping φ. Then, the training algorithm would only depend on the data through dot products, that is on functions of the from 
There are different kernel functions and Gaussian radial basis function (RBF) is the most popular kernel among them defined as

After solving this optimization problem, those points with 


SVM was originally developed for binary problems. But now it is possible to apply SVM for multi-class problems. This is achieved through approaches such as one-against-one, one-against-all and all together.
LS-SVM is a version of SVM in which the minimization problem is solved by constructing a set of linear equations. This version was proposed by Suykens et al.
32
according to which the minimization problem becomes


One defines the Lagrangian

The linear equations can be obtained as

Finally, the decision function is obtained as

Results and discussion
Figure 4 represents the time domain vibration signals for different alternator conditions. As it can be seen, the amplitude of the vibration signal increased significantly when a fault occurred in the alternator. The vibration behaviour of the alternator under these faults causes disturbance, and this can be distinguished from the regular vibration of normal mode.
Time signals of different alternator conditions.
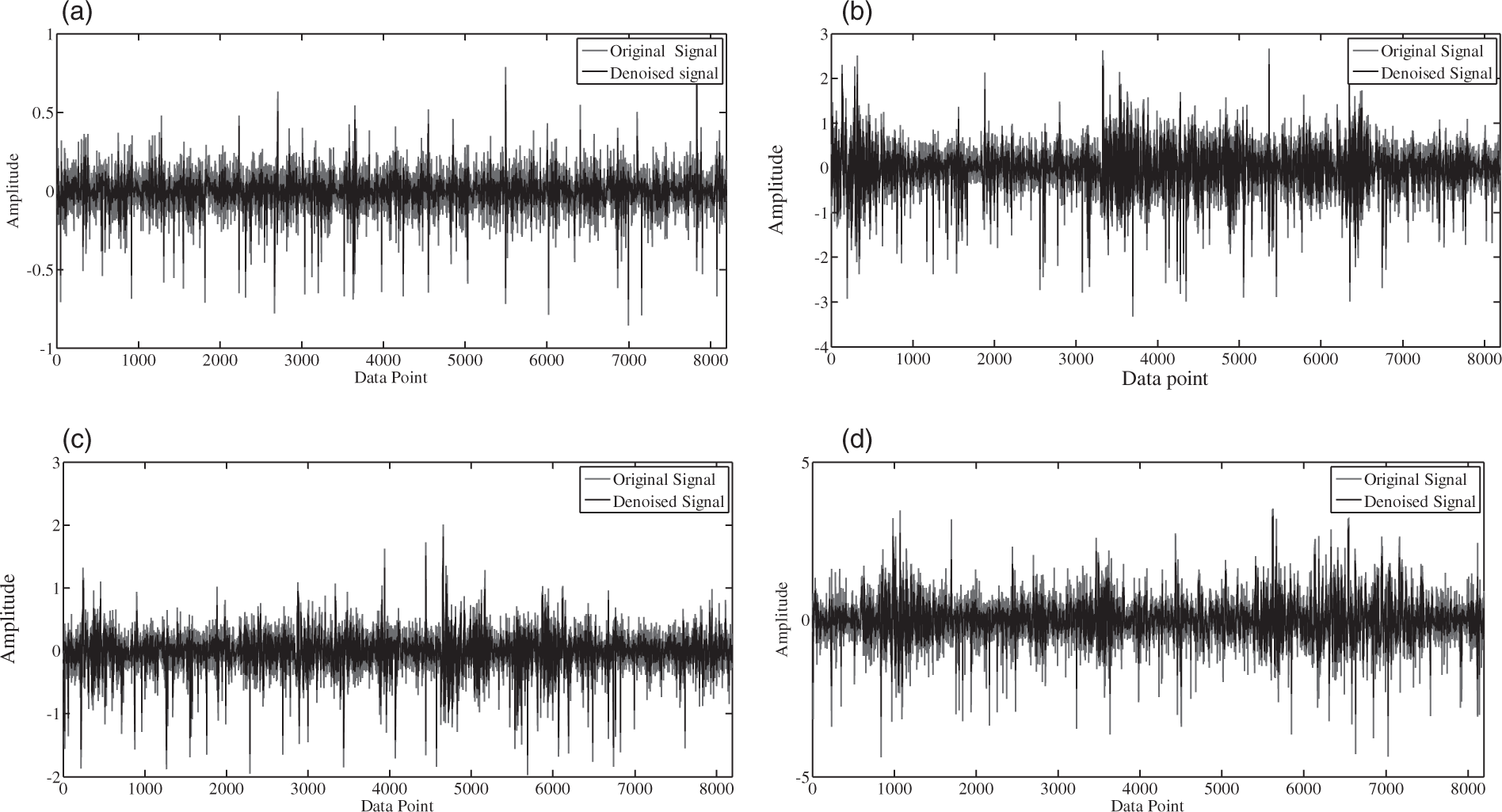
In this research, the wavelet coefficients are passed through a threshold testing. The coefficients which were smaller than the threshold limit were removed. Then, the resultant coefficients were used to reconstruct the signal. Soft method was used as a signal denoising method. A heuristic sure method was applied to compute the thresholds. Previous research has shown that the method is proper for signal denoising.10,11 Figure 5 presents the frequency domain signals of different alternator conditions. It is observed that the FFT amplitudes of the faulty conditions are more than healthy condition. It can also be seen that there are three major peaks in the spectrum of all conditions. But the first peak for CR condition is the most. The second and third peaks for UDS condition are more than others. Figure 6 shows the original vibration signal in comparison with the denoised signals for the alternator conditions.
Frequency domain signals of different alternator conditions. Original and denoised signals of the alternator conditions: (a) H, (b) CR, (c) WB and (d) UDS.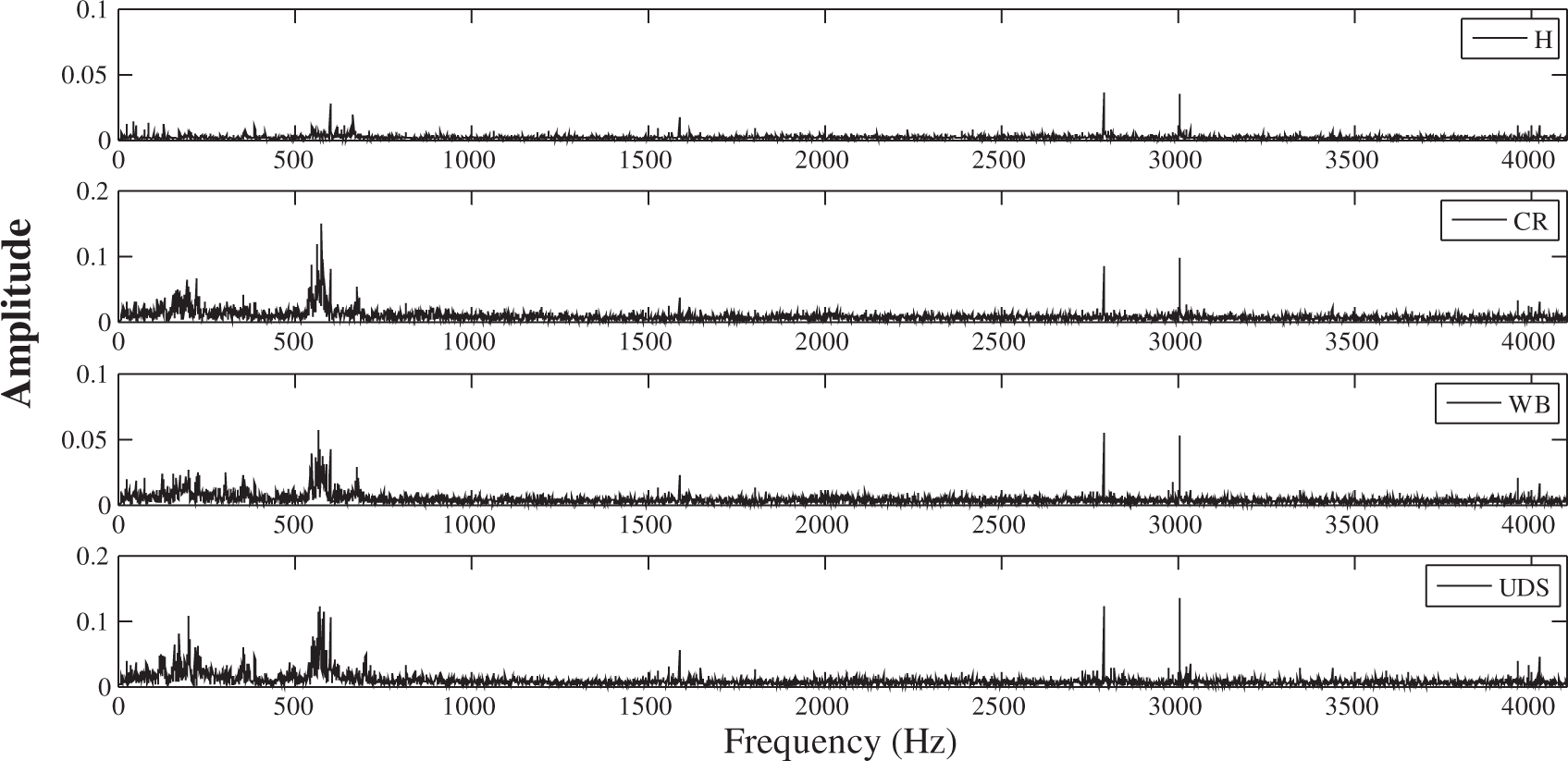
In this work, DWT was applied to process the vibration signals in time-frequency domain. To this end, Daubechies mother wavelet type 1 (db1) and four decomposition levels were used. Figure 7 illustrates the wavelet coefficients of the different alternator conditions. As it is clear, the wavelet coefficients of the faulty conditions have very different behaviours indicating the effects of mechanical faults on the vibration behaviour of the alternator.
DWT coefficients of the alternator conditions: (a) H, (b) CR, (c) WB and (d) UDS.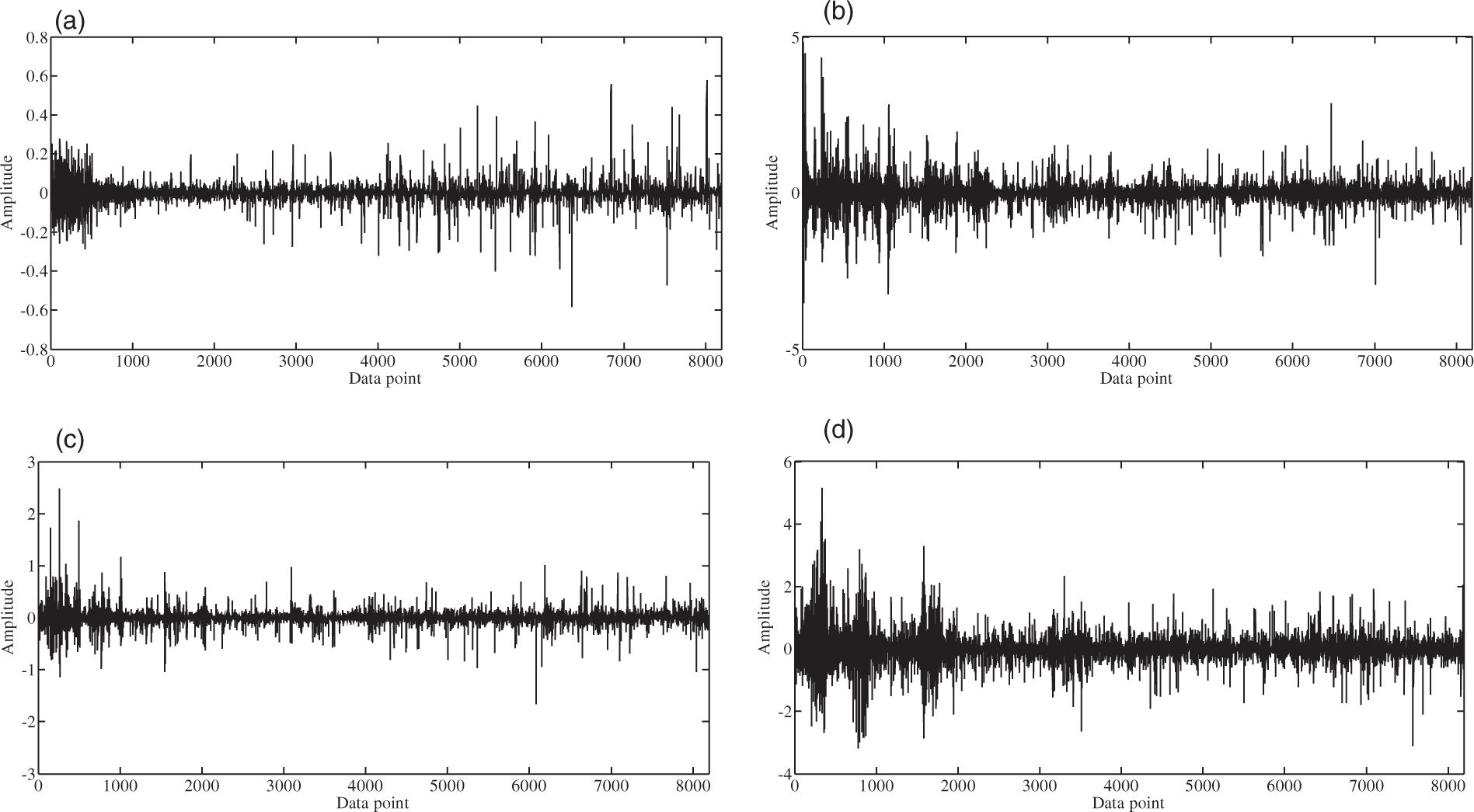
The layout of data for this research.
Confusion matrix of LS-SVM for detection of the alternator conditions.
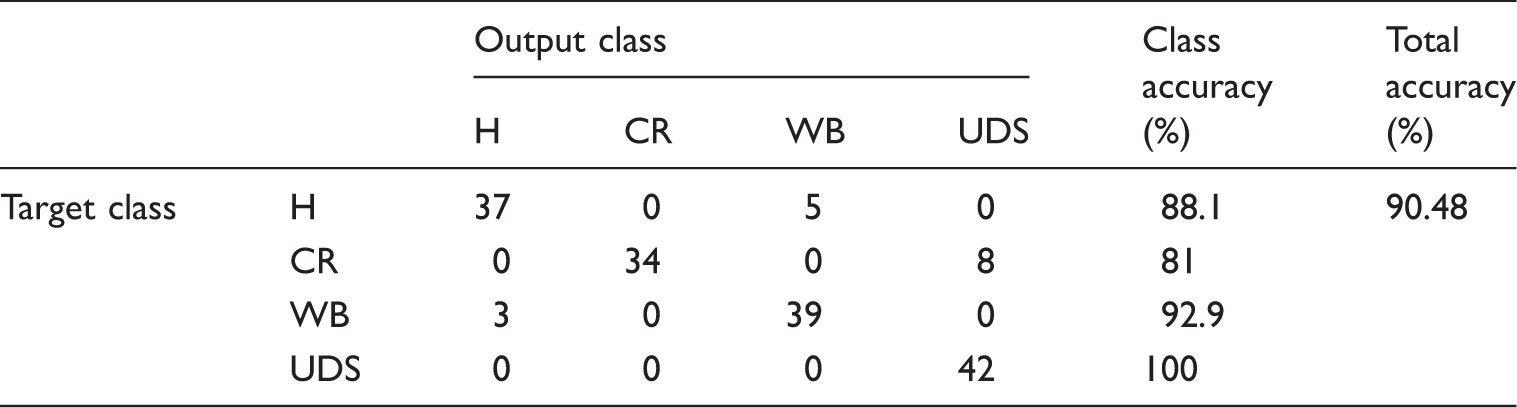
It is observed in Table 5 that the detection accuracy of CR condition was the lowest but acceptable. This can be due to the small size of the crack fault and slight effects of this fault in the alternator vibrations. Moreover, it can be seen that from 42 data of crack in rotor, 34 data were correctly detected and 8 were wrongly detected as unbalanced drive shaft fault. Hence, the crack in rotor fault generated a vibration behaviour similar to the unbalanced drive shaft fault. The detection accuracies achieved for healthy, worn bearing and unbalanced drive shaft conditions were 881, 92.9 and 100%, respectively. In general, according to the total accuracy of 90.48% it can be said that the proposed procedure has a high ability in alternator fault detection.
Conclusion
In this research, WT and LS-SVM methods were used to develop an intelligent procedure for alternator fault detection. The vibration signals were firstly denoised, and then analysed using the DWT method. A data set was constructed by applying 25 statistical features on DWT coefficients. In the classification stage, LS-SVM with one-against-one method and Gaussian RBF kernel was employed. The results showed that the proposed procedure detected the healthy, crack in rotor, worn bearing and unbalanced drive shaft conditions with the accuracies of 88.1, 81, 92.9 and 100%, respectively. Among them, the lowest and highest accuracies were related to crack in rotor and unbalanced drive shaft conditions. From the results, the detection accuracy of the alternator faults was good enough. The obtained results demonstrated that the proposed procedure can reliably be used for fault detection of alternator.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.