
Abstract
Assistive Technology can be a highly effective tool in supporting students with Learning Disabilities (LD) in addressing foundational academic skill gaps as part of academic and behavioural one-to-one instruction. However, there are barriers to administrators wanting to equip in-service educators to integrate assistive technology into special education contexts, such as in-service educators’ technology acceptance and the need for effective in-service training. This article explores a model for supporting in-service educators to integrate assistive technology into an existing academic and behavioural one-to-one instruction program for students with LD through a partnership with a nonprofit educational provider and a university’s social robotics laboratory. We applied a co-design approach and followed a human-centred design methodology, incorporating a technology acceptance model to support educators in broadly integrating assistive technology into existing research-based programs for students with LD.
Keywords
The Learning Disabilities Society (LDS) is a non-profit educational provider that supports students with LD using assistive technologies. Through a visionary partnership with a university’s social robotics laboratory, the team integrated a social robot as an assistive technology to support in-service educators working with students with LD into an existing academic and behavioural one-to-one instruction program. Guided by the process of co-design and technology acceptance model, the integration of assistive technology (AT), a social robot becomes not just a tool but a catalyst to support educators at LDS.
Introduction
With the global movement towards inclusive education models in many developed nations, most students diagnosed with LD are learning in mainstream schooling environments (Yuen et al., 2005). While there are significant social, emotional, and learning benefits to inclusive education, students with LD are unlikely to receive the individualised instruction and support they need from a mainstream classroom placement alone, leaving them “included but underserved” (Crockett et al., 2012, pp. 405–436). As such, students with LD benefit from academic and behavioural one-to-one instruction - an evidence-based, high-leverage practice (Aceves & Kennedy, 2024) that provides targeted support in areas of academic challenge. This approach allows educators to help students develop strategies to overcome foundational skill gaps within a one-to-one or small-group context (Fuchs et al., 2008; Gerzel-Short & Hedin, 2022). To keep students with LD on-task and maximise their academic support, McLeskey (2017) identifies three key high-leverage practices 1 (HLPs): academic and behavioural instruction, integration of AT, and opportunities for active engagement. Note that HLPs are key practices that teachers should learn and be able to implement when teaching students.
Assistive technologies are often touted for their ability to capture students’ interest during learning experiences; however, the value and efficacy of AT for students with LD is highly dependent on the ability, skills, and commitment of the educator designing the learning experience and delivering instruction (Ertmer & Ottenbreit-Leftwich, 2010; Love et al., 2020). Further, studies have shown that within the population of students with disabilities, individuals with high-incidence disabilities, such as LD, reported far lower rates of technology use than peers with low-incidence disabilities (Bouck, 2016; United States Department of Education & Rehabilitative Services, 2018).
This finding suggests the importance of investigating barriers to engagement with AT while supporting students with LD, which is currently underutilised by educators within academic and behavioural instruction (Bouck, 2016; Boyle & Kennedy, 2019). For students with disabilities, using AT can offer opportunities beyond simply accessing curriculum or learning opportunities and support them to become more active participants in their learning and make meaningful progress toward learning goals (Okolo & Diedrich, 2014). Despite its potential advantages, Boyle and Kennedy (2019) and Bouck (2016) assert that technology has been underutilised for students with LD due to barriers regarding educators’ lack of experience when implementing technology in learning environments.
A national US study by Wei et al. (2011) found that despite more students with LD receiving instruction in general educational classrooms, most teachers in general education settings reported receiving little or no preparation for the best methods for teaching students with disabilities, such as using AT. Okolo and Diedrich (2014) identified additional barriers to integrating technology into the educational programming of students with LD, including lack of access to technology, lack of teacher time to learn and implement technology, and restrictions on loading or using software or applications. These barriers often serve to create resistance to the use of technology from educators working with students with LD, in addition to possible resistance from parents/families who may view technology as an unhelpful distraction or redirection from pencil/paper-based skills, such as printing and handwriting (Hirsch et al., 2019). Given these identified barriers and challenges to supporting educators in integrating technology into educational programs and learning outcomes for students with LD, integrating an AT that is new to all the instructors at the non-profit educational organisation was presumed to be a challenging endeavour. As such, the team began by using a co-design approach involving all stakeholders to jointly develop a new training program and protocol for implementing a new AT component into students’ existing academic and behavioural instruction program. In addition, we drew on the Technology Acceptance Model (TAM) (Davis et al., 1989; Ghazali et al., 2020; Venkatesh et al., 2003) to understand instructors’ experiences and perspectives about technology and technology use in academic and behavioural instruction for students with LD. This insight has allowed us to more appropriately plan the content, structure, sequence and ongoing support needed for the success of the new AT.
This paper shares practices from implementing a new AT approach by the administration of a nonprofit educational organisation delivering academic and behavioural instruction to students with LD. We draw on lessons learned from this work to provide a fulsome perspective of the challenges and successes related to the implementation, training, and retention of new AT use by educators for students with LD.
To integrate a social robot into LDS’s existing Assistive technology toolkit, the team leveraged QT, a small humanoid capable of speaking and expressing through head and hand gestures. Backed by evidence of its positive impact, especially on children with Autism Spectrum Disorder (ASD), the team find it a promising tool for instructors to foster engagement and enjoyment during one-on-one academic and behavioural instructional sessions with students facing LD.
Engaging Educators in Using New AT: Social Robots as a Case Study
AT is any device, software or equipment used to maintain or improve the functional capabilities of a person. Assistive technologies are frequently used in academic and behavioural instruction to support students with LD with their learning and demonstrate their learning and mastery of academic skills. They can support students with LD in three key areas: (1) providing opportunities for greater learner independence (e.g., a student with a written output challenge who requires a scribe may be able to type independently); (2) the ability to receive or engage with learning material in a way that is easier for a learner (e.g., a pen that scans text and reads it back to a student who struggles with reading); and (3) creating an engaging learning environment through the use of multi-modal learning that helps students stay on-task during instruction (Chiong & Shuler, 2010; Hirsch et al., 2019). These ATs can be powerful facilitators for learning, supporting students with LD in meeting learning objectives during academic and behavioural instruction, leading to improved academic outcomes.
Social robots are a relatively new AT that has been implemented in a range of special education contexts. Social robots are “designed to interact with people in human-centric terms and to operate in human environments alongside people” (Breazeal et al., 2016, pp. 1935–1972). They are designed to interact socially with the user through verbal and non-verbal expressions (e.g., speech, performing physical gestures, using facial expressions). These interactions, combined with the robot having some level of autonomy, make the robots appear social (Henschel et al., 2021). These robots have a range of physical appearances, from human-like (humanoids) to zoomorphic (animal-like), mechanoid (machine-like) or cartoon/toy-like. They can be operated using different modes of function, including fully autonomous, semi-autonomous, and WoZ (Wizard-of-Oz, invisibly controlled by an operator) (Bartneck et al., 2020; Scassellati et al., 2012) and perform tasks without human intervention. When fully autonomous social robots sense their environment, make decisions, and perform tasks without human intervention, semi-autonomous and wizard-of-oz controlled social robots are partially pre-programmed and partially or fully operated by humans. Note, in many successful AT applications, semi-autonomous social robots are being employed with human professionals (e.g., teacher, instructor, therapist), activating some autonomous behaviours or interaction games with the robot, i.e. via a tablet computer or other dedicated interfaces. This mode of robot operation allows the human professional to stay ‘in-the-loop’ and in control of the interaction with a child and the session as a whole. For example, a humanoid robot was used in this way for over a year by staff who worked with children in a nursery school for children with Autism Spectrum Disorder (Syrdal et al., 2020).
Given the evidence for using AT as an effective tool in engaging students with LD, we sought to investigate the impact of social robots on student engagement during their existing academic and behavioural instructional programs. The nonprofit educational organisation that trialled the social robot serves over 500 students yearly in their one-to-one instruction program. Instruction is delivered by approximately 35 highly experienced instructors, most of whom had minimal experience integrating AT into instruction.
The QT robot (Figure 1, left), developed by LuxAi (Luxembourg), was selected for trials due to its previous successful application with students with disabilities in clinical and educational settings. This small humanoid robot can gesture with its head and hands, exhibit facial expressions, and speak. While it appears autonomous to a child/learner, it is controlled by educators via a tablet, allowing them to trigger specific behaviours and interactive games (Figure 1, right). This mode of robot operation ensures that educators remain in control of the interaction and the overall session. The QT robot was originally designed to support children with ASD to deliver interventions for behavioural and emotional support (Pinto Costa et al., 2018, 2019). (Left) QT, an expressive small humanoid robot developed by LuxAI
2
. (Right) Study setup. An instructor and a student interact with the QT robot during a session.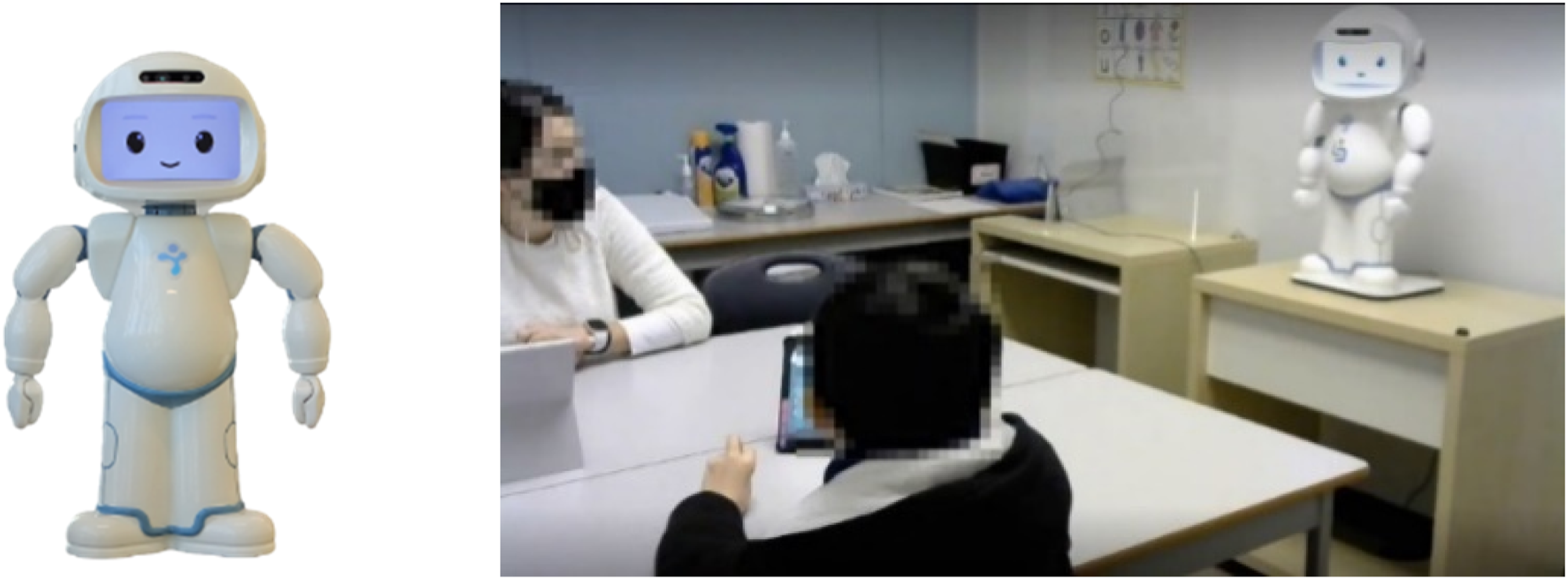
In addition to its initial applications for children with (ASD), the QT robot has been used to elicit empathy through storytelling in university students (Spitale et al., 2022) and support children with their handwriting skills (Tozadore et al., 2022). To further support students during academic and behavioural instruction, the organisation (LDS) and the university partner developed an intervention using the QT robot to help students stay on-task during the session and learn self-regulation techniques that hold the potential for generalising to other educational experiences (for further information about the intervention, see (Azizi et al., 2022; Azizi et al., 2023)). However, based on previous research and the organisation’s administration’s experience implementing new initiatives, careful thought and planning were needed to engage the organisation’s educators in the intervention and employ it within the students’ existing academic and behavioural instructional programs.
Designing a technology solution for LDS did require a deep understanding of the challenges faced by students with LD. The team also studied instructors’ teaching methods and needs. Additionally, exploring a social robot as a teaching tool involved assessing its instructional role, potential to motivate students, and activities to address these challenges. Investigating the above aspects was essential to ensure that the integration of AT met the needs of instructors and students. As this integration was in a real-world setting, the design process aimed to integrate AT without altering the instructional program’s goals or curriculum, accommodating diverse LD. Using a co-design approach and a human-centred methodology, the team developed and tested prototypes in real-world settings, leading to the creation and long-term evaluation of the AT. Five Phases of the Design Thinking Process. Adapted from (Brown & others, 2008). We employed a co-design approach in each of the phases.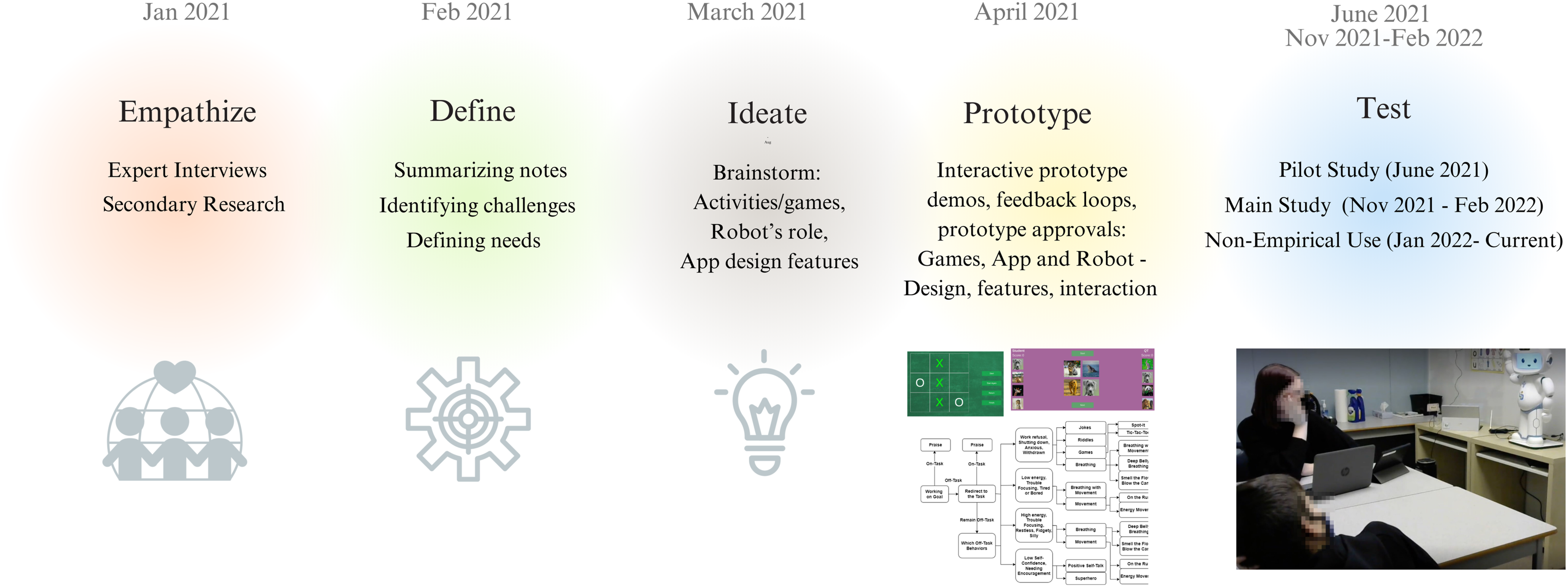
Providing Context-Appropriate Solutions through a Co-Design Approach
We employed a co-design approach and followed the ‘Design Thinking’ method by Ideo (Brown & others, 2008) to actively and equitably engage stakeholders throughout the research and development process while keeping their needs and insights at the centre. The Design Thinking method is iterative and non-linear and consists of five stages: Empathize, Define, Ideate, Prototype, and Test (Figure 2). Our team is comprised of educators, administrators and human-robot interaction (HRI) researchers. From the project’s inception to its implementation, we held online weekly or bi-weekly co-design and feedback sessions to ensure alignment with project goals and technical feasibility, with the flexibility to revisit the previous stages of the design process as needed. Co-design activities included expert interviews, brainstorming sessions, interactive prototypes, feedback loops, prototype approvals and pilot testing. 1. 2. 3. 4. a. b. c. 5.
Since the Design Thinking approach is non-linear, we frequently revisited earlier phases to enhance our understanding. Following the pilot study, the team identified areas for improvement and iterated on the method accordingly.
Assessing the acceptance of AT among instructors was important to understanding various aspects, such as ease of use, perceived usefulness, enjoyment and intentions, which are critical in educational settings. Aware of the Technology acceptance model, a structured empirical framework, the team saw this as crucial in gauging users’ acceptance and adoption of AT.
Using a Technology Acceptance Model (TAM) to Evaluate Users’ Acceptance Towards AT
Research demonstrates that educators come to work with diverse knowledge, experience, and attitudes towards AT. Prior to introducing social robots to the instructors working at the nonprofit educational organization, the use of AT in sessions with students was low, so this, combined with findings from other research studies, led us to assume that instructors may be resistant to implementing new AT, or that ongoing support was needed. The goal of developing a fulsome understanding of instructor acceptance and prior use of AT was to identify what training and initial and ongoing support would be required to successfully implement a new AT in one-to-one academic and behavioural instruction programs for students with LD. The barriers educators face when using AT vary based on their background and general attitudes toward technology in general (Okolo & Diedrich, 2014). Without support, many educators may not see the value of AT or have the time to explore its usefulness. This is increasingly true with more complex or advanced AT, like social robots, as preconceived perceptions of the technology being “too complicated to use” would add additional challenges to a successful implementation. By understanding educators’ acceptance and prior experience with AT, specific support or professional development for educators can be developed to address these barriers and help them implement AT into their practice.
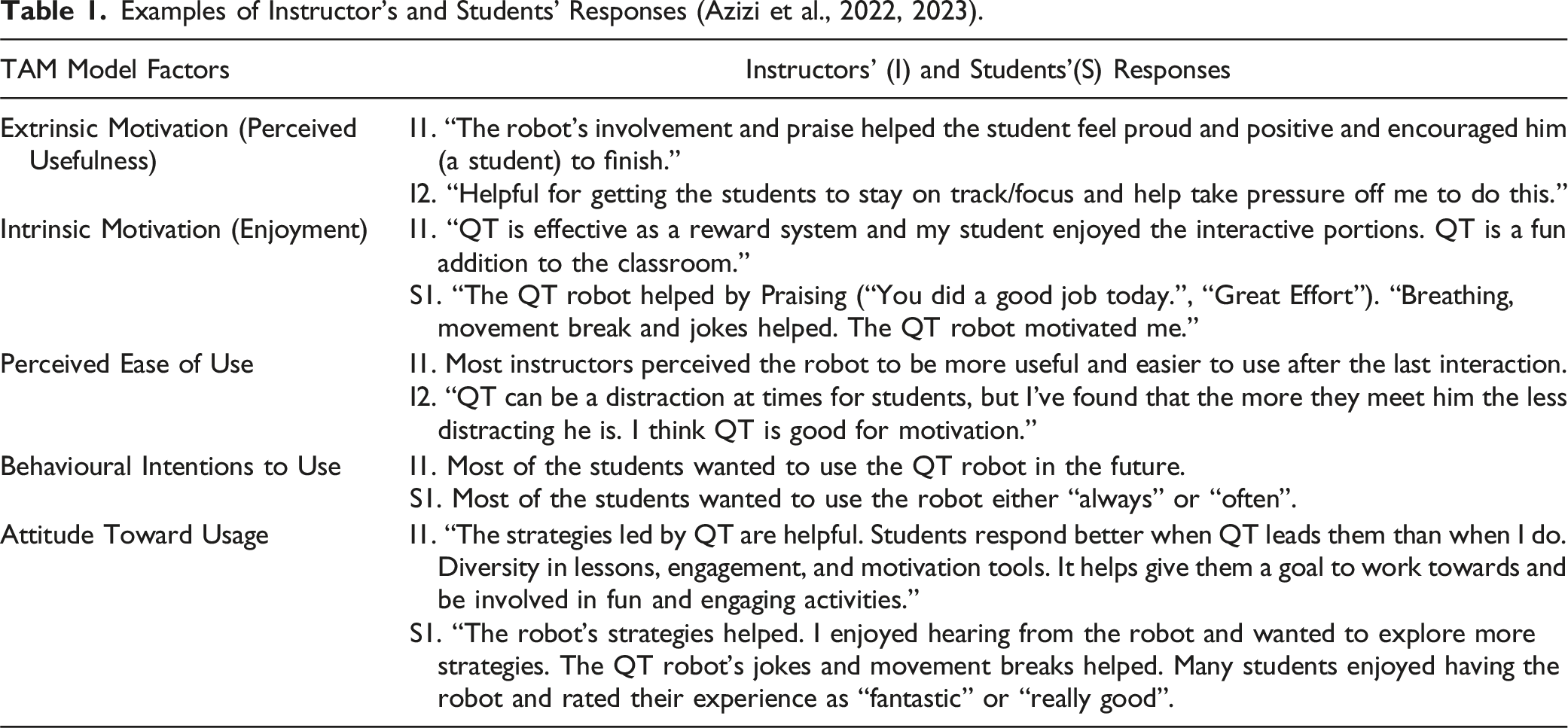
The TAM (Davis, 1985; Venkatesh, 2022; Venkatesh et al., 2003) is a widely used theoretical model in the field of information systems to predict and explain user acceptance of computer-based information technology products and services. The model has been extensively adopted and tested in various domains and has been found to be a valid and reliable predictor of user acceptance. It has been used as a framework for understanding and improving technology adoption and diffusion in organisations and for developing strategies for improving design and implementation. While other more complex technology acceptance models have been developed in research, for our in-situ studies, we needed to choose a reliable measure that is easy to administer, i.e. does not add significantly to the educators’ workload. Using the TAM, we identified extrinsic and intrinsic factors that would impact the implementation and longevity of the intervention by instructors and are as follows:
Examples of Instructor’s and Students’ Responses (Azizi et al., 2022, 2023).
Support Needs for Educators Implementing AT
Using the intervention trial and TAM questionnaire helped us understand what ongoing support instructors would need when using the intervention. These needs included opportunities for instructors to observe the intervention during one-to-one instructional sessions, the option of in-person support or a co-instructor when working with the robot, and a community of practice for connecting with peers who were also using the social robot into their sessions. These support structures were integral to the implementation, leading to a much stronger uptake and use of social robots during one-to-one sessions than other ATs available at the organisation. Additionally, LDS uses a variety of assistive software tools for online learning and resources for at-home study (e.g., tools for advanced digital writing and reading support or educational software to promote math, science, and literacy skills.)
The collaboration between the LDS and the social robotics lab not only resulted in integrating the AT, a social robot, into existing academic and behavioural instructional programs but also expanded different applications for students with or without learning difficulties. It supported the development of “in-house” expertise at LDS for programming the social robot to expand new applications and interventions for students to foster social and academic skills.
Building Skills for Ongoing AT Learning and Applications
Another positive outcome of the implemented support systems was the creation of a mechanism for ongoing communication between educators and the leadership team. This mechanism allowed for technical and professional support with the use of new and existing types of AT during academic and behavioural instruction instruction. This resulted in the creation of new programming and additional functions developed for the robot based on instructors’ use or identified student needs. The partnership between the educational organisation and the robotics lab supported the development of ‘in-house’ expertise for programming the social robot, allowing expansion to the suite of activities, games, commands, responses, and actions that the robot can do under the control of the user-friendly interface created during the collaborative design process. Examples of this are the creation of social and emotional programming for small group programs (such as summer camps and a parent-participation preschool program) that encourage self-regulation and peer-to-peer interactions and games that reinforce academic skills (such as phonics, identification of letter sounds, and CVC/sight words). When instructors used the QT robot for students with LD, they mentioned that QT’s encouragement and games helped students reach their session goals, kept them focused and relieved their pressure. The robot offered diverse breaks, motivating dialogues, engaging activities (e.g., jokes, riddles, games, physical exercises, breathing exercises, positive self-talk), and praised students during mediation. Instructors noted that QT’s strategies to refocus students were effective, and students responded better to QT’s breathing and movement exercises than to those led by the instructor (without the QT robot). The educators who identified new functions or games for the robots also became great ‘champions’ for their use with students. Similar to the findings of (Wong & Cohen, 2015), when investigating the use of assistive technology by teachers for students with visual impairments, having multiple champions of assistive technology, rather than a single interested educator, was essential for creating a culture where assistive technology is collectively embraced as it provides substantive opportunities for sharing practice, finding support, and navigating challenges. Details on creating a culture where assistive technology is collectively embraced as it provides substantive opportunities for sharing practice, finding support, and navigating challenges. Overall, to integrate a new assistive technology at LDS, we incorporated the following steps (Figure 3). Steps to integrate a new assistive technology (AT).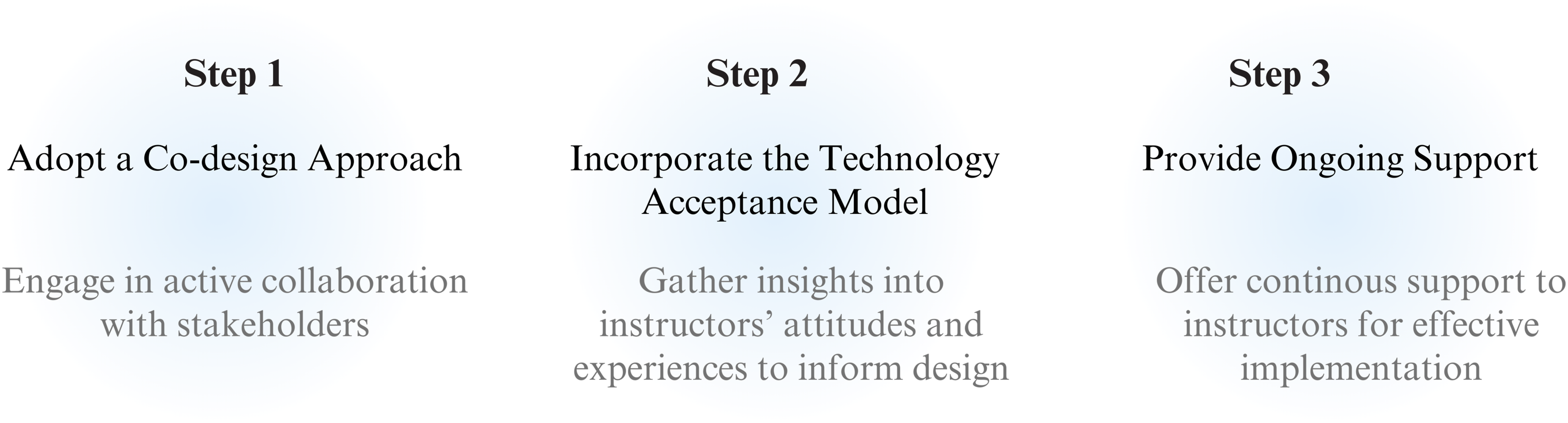
Implementing AT into educational programs at LDS enhanced individualised academic interventions for students with LD. Using the social robot improved students’ on-task behaviour, goal completion rates, and engagement during one-on-one sessions, making learning more enjoyable. However, challenges such as limited teacher training and resources hinder their integration into general and special education practices.
Conclusion
Implementing AT, such as social robots, into the educational and learning support programming for students with LD is a research-based strategy that supports learners engaging in individualised academic interventions. Our work shows that social robots can support students with LD in one-to-one instructional sessions when developed with human-centred design. They can potentially enhance students’ on-task behaviour and goal completion rates, reduce off-task behaviours and improve overall engagement for students with LD. Additionally, students with LD may find these robots enjoyable and supportive during learning activities. By equipping learners with tools and confidence, the new AT (social robot) enable them to better meet the demands of both current and future learning. However, integrating AT into the teaching practice of generalist and special education educators is an area of demonstrated challenge, with few easy solutions given the nature of schools/educational providers, teacher training, resourcing, and availability of support for this work. While exploring interventions using AT is important for developing evidence-based practice in this area, understanding the barriers that continue to make this work challenging for the educators tasked with this work is equally important. Despite how promising they may be to learners, interventions or uses of AT that are seen as unfeasible or too difficult for educators are unlikely to be successful.
This paper highlights the need to carefully consider how new research-based AT tools can be leveraged into effective educational interventions so that administrators, in-service educators and paraprofessionals understand their value, are willing to explore them in relation to their own practice and are able to effectively use the tool both during the trial phase and into the future. Our exploration of a model for administrators to engage in-service educators in integrating AT within their existing teaching practice highlights the benefits of engaging deeply with the educators responsible for implementing AT interventions. The use of carefully selected tools, such as the co-design approach, human-centred design methodology and TAM, provides a detailed understanding of the needs and abilities of the user/educator and how the tool needs to work in a particular context. This information makes the integration of AT more feasible and successful, which is essential in supporting students with LD in accessing the tools and learning they need to thrive throughout their lifespan. This work elucidates the benefits of collaborative approaches between the AT experts designing interventions/technologies and educational experts who may or may not take up the intervention/technology based on the chosen approach, design, feedback and ongoing support.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was undertaken, in part, thanks to funding from the Canada 150 Research Chairs program.