
Abstract
Differential item functioning (DIF) is a common challenge when examining latent traits in large scale surveys. In recent work, methods from the field of machine learning such as model-based recursive partitioning have been proposed to identify subgroups with DIF when little theoretical guidance and many potential subgroups are available. On this basis, we propose and compare recursive partitioning techniques for detecting DIF with a focus on measurement models with multiple latent variables and ordinal response data. We implement tree-based approaches for identifying subgroups that contribute to DIF in multidimensional latent variable modeling and propose a robust, yet scalable extension, inspired by random forests. The proposed techniques are applied and compared with simulations. We show that the proposed methods are able to efficiently detect DIF and allow to extract decision rules that lead to subgroups with well fitting models.
Keywords
Introduction
Multi-item batteries are frequently used in social scientific surveys to examine latent traits. Examples include the measurement of creativity (Jauk et al., 2014), social anxiety (Prenoveau et al., 2011), and personality disorders (Drislane & Patrick, 2017). Some traits, such as self-leadership (Furtner et al., 2015), may include multiple dimensions and can involve complex (i.e., multidimensional) measurement structures. If these latent traits are to be meaningfully used for substantive analyses, one must assume measurement invariance. This requires that the association between items of the questionnaire and latent traits of individuals do not depend on group membership. However, especially in the context of large scale surveys, the measurement invariance assumption rarely holds because of the heterogeneous nature of survey samples (Van De Schoot et al., 2015). Furthermore, a researcher can rarely identify and control all factors that jeopardize this assumption.
Measurement non-invariance is also referred to as differential item functioning (DIF). If group differences are found in latent factors measured by a survey questionnaire, it cannot be ruled out that this effect is only an artifact due to unnoticed DIF. That is, if DIF remains undetected, group differences can be misinterpreted. The common methods used to test for DIF usually require pre-specification of the subgroups in which DIF is assumed (Hambleton et al., 1991, p. 110). The decision which subgroups to consider for assumed DIF is often driven by theoretical priors, strong convention and biases (see Brand et al., 2019). This lets many potential relevant subgroups undetected if they do not reflect the researcher’s assumptions. Therefore, more flexible, data-driven approaches can complement traditional approaches for detecting DIF.
By using data-driven, algorithmic approaches, it is possible to detect subgroups with DIF when little theoretical guidance on the relevant subgroups is available. This strand of research includes the work of Vaughn and Wang (2010) and Schauberger and Tutz (2016), who propose data-driven methods for detecting DIF for single dichotomous items in tests or questionnaires. A particularly promising method to algorithmically account for heterogeneity is model-based recursive partitioning (MOB), which embeds model estimation and subgroup detection in one methodological framework (Zeileis et al., 2008). In this case, the researcher only needs to specify a set of partitioning variables along with the statistical model, which are then used to iteratively search for relevant subgroups. Tutz and Berger (2016) as well as Strobl et al. (2015) present the usage of MOB for detecting DIF in the Rasch model. Komboz et al. (2018) propose a MOB-based approach for the Partial Credit Model, called PCM Tree, in which a single latent variable that may be susceptible to DIF is assumed. Similar in spirit, structural equation model tree (SEMTree) approaches have been proposed to detect homogeneous subgroups in latent variable modeling via recursive partitioning (Arnold et al., 2021; Brandmaier et al., 2013). However, there is little guidance on how recursive partitioning may be best utilized for multidimensional measurement models with ordinal response variables.
Comparison of tree-based methods for detecting DIF in MGR models.
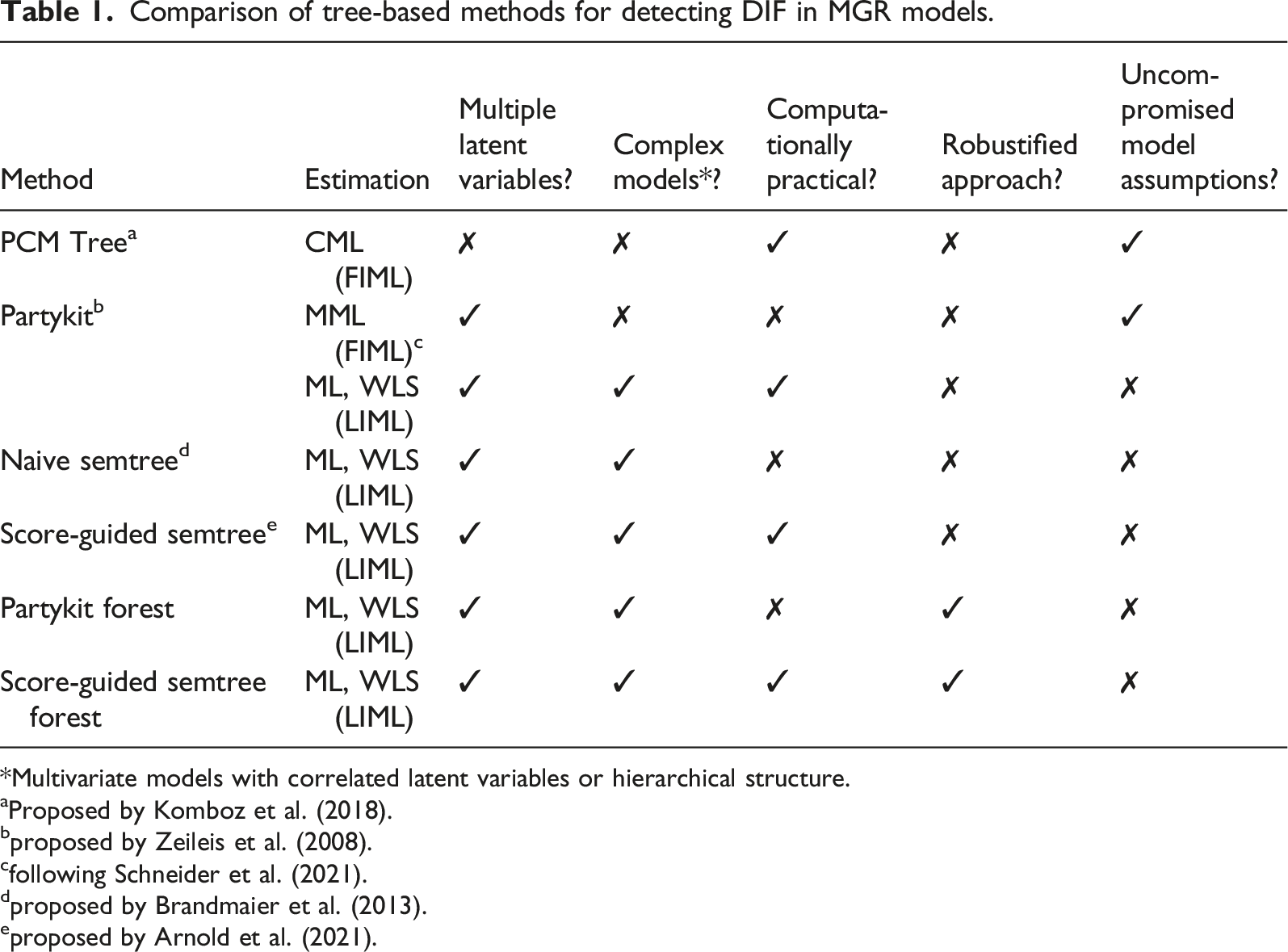
*Multivariate models with correlated latent variables or hierarchical structure.
aProposed by Komboz et al. (2018).
bproposed by Zeileis et al. (2008).
cfollowing Schneider et al. (2021).
dproposed by Brandmaier et al. (2013).
eproposed by Arnold et al. (2021).
In addition, we address the instability issues of single tree approaches when modeling DIF. Due to MOB’s hierarchical nature, small changes in the data can severely affect which subgroups are eventually identified in the splitting process (Brandmaier et al., 2016). While PCM Tree as well as the partykit and semtree approaches are susceptible to such changes, a random forest-like extension to MOB for MGR models, is analyzed that allows to robustly identify subgroups with DIF in multidimensional latent variable models.
We test and compare the outlined methods in simulations. Multiple simulation scenarios are considered that vary in the complexity of the partitioning task. The simulation results show that the proposed methods are able to correctly retrieve subgroups with distinct sets of model parameters. While partykit and semtree correctly identify subgroups in settings with clean partitioning structures, their multi-tree extensions are able to retrieve complex groups that could not have been recovered by a single decision tree. Nonetheless, computation time varies considerably across all considered methods.
Methodology
Methodological Background
Stochastic models which specify the relationship between single items with a limited amount of response categories and a continuous latent variable are consolidated under the term item response theory (IRT). Usually, in IRT models, a latent variable represents the ability of the respondent. This ability is assumed to underlie their response behavior (Steyer & Eid, 2013). In the following, we refer to this latent variable as ξ. Let the graded response to item i be denoted by the response variable Y
i
. In IRT models for ordered response variables, as opposed to dichotomous response variables, ξ is measured by a number of items i = 1, …, m, to which the respondent answers by choosing one of the ordered response categories k
i
= 0, …, l
i
. The most widely applied IRT framework for items with a small amount of ordered response categories is the graded response model (GRM) (Samejima, 1969). Furthermore, in a multidimensional IRT framework (also referred to as MIRT, see Forero and Maydeu-Olivares (2009)) a response variable Y
i
may be linked to more than one latent variable. In the following, we refer to the multidimensional GRM as MGR model. For an MGR model,
The fact that the latent variables are measured by graded responses on items means that the probability of answering in a category smaller or equal to a certain ordered category k
i
depends on the (multidimensional) distribution of the latent variables. In the MGR model, this relationship is defined by the cumulative category response function, that is the 

In IRT models, differential item functioning (DIF) occurs if an item parameter depends on covariates of
In practice, DIF can be very problematic because the number of relevant covariates may be large. Also, there is an even greater amount of possible values or value ranges of these covariates for which the item parameters might differ. In addition, complex interactions within the covariate vector
Usually, the hypothesis
Turning to model parameter estimation, social scientists often use confirmatory factor analysis (CFA) to operationalize and estimate latent variable models with Likert-scale items (Li, 2016). In a classic CFA model, the observed items are assumed to be measured on a continuous (metric) scale. The basic factor analytic model with intercepts is

The CFA approach can also be used to estimate MGR model parameters. For this, a continuous, normally distributed latent response variable 
Parameter estimation in the factor analytic framework for metric items is usually done with the maximum likelihood (ML) estimator (Jöreskog, 1969). The use of ML estimation in SEM requires the assumption that the observed variables follow a multivariate normal distribution (Li, 2016). Note that this assumption rarely holds for ordinal items. In the factor analytic framework for metric items only univariate and bivariate information is used for parameter estimation. For this, the objective function F
ML
is minimized, that is
Calculating the log-likelihood function for every single individual j in the sample, that is
It is also possible to use the limited information approach to parameter estimation for factor analysis with ordinal items. As mentioned above, normal distribution of the observed response variables cannot be assumed in this case. However, through the use of an asymptotically distribution free weighted least squares (WLS) estimator, normal distribution of the observed response variables need not be assumed. Prior to parameter estimation, the thresholds that define the relation of 
Both CFA and MGR models can be consolidated under the structural equation model (SEM) framework, as both models hypothesize about multivariate constructs by specifying relationships between observable and latent variables.
Model Based Recursive Partitioning to Detect Differential Item Functioning
The application of tests such as the LR test to detect DIF requires a priori specification of the analyzed groups. Often though there are several numerical or categorical covariates and a large number of possible splitting points and the researcher may not have specified theoretical priors for all of the possible subgroups. Consequently, some subgroups with DIF might remain uncovered. In cases like this, recursive partitioning can be used as a data-driven method to uncover relevant groups for DIF. Recursive partitioning methods follow tree-based, algorithmic approaches (Breiman et al., 1984). In recursive partitioning, the full sample sits at the root of a decision tree. This root is considered a candidate for potential splitting into subgroups with respect to any of the covariates Z r in {Z1, …, Z R } (also called partitioning variables). A subgroup represents a tree node, which in turn is a candidate for further splitting. The algorithm may continue splitting until certain predefined stopping criteria are met. This is usually the case when there is no more significant instability in a tree node or when the subsample becomes too small. The terminal nodes of a decision tree are also called leaves. There are several methods that can be grouped under the umbrella term Model Based Recursive Partitioning (MOB), which we present below.
Originally, Structural equation model trees (SEM Trees), as presented by Brandmaier et al. (2013), combine recursive partitioning with the LR test. The algorithm searches through all partitioning variables to find subgroups that differ with respect to the model parameters. It is implemented in the semtree package (Brandmaier et al., 2015).
With the original (or “naive”) semtree approach, the parameters in
One clear advantage of the naive semtree approach, compared to the LR test, is that the researcher does not need to pre-specify the functional form between the covariates and DIF. Rather, the tree structure is learned from the data in an exploratory way (Brandmaier et al., 2013). Another advantage is the ease of interpretation of the resulting subgroups. They are directly interpretable because they are built on traceable sample splits. Thus, the advantage that no pre-specification of subgroups is necessary, as in mixture models (Rost, 1990), are combined with the advantage of the LR approach, that the resulting subgroups are interpretable with respect to covariates. However, the high computational cost of this method can make its application on large data sets and complex models unfeasible.
A similar recursive partitioning approach is provided in the partykit package by Hothorn and Zeileis (2015). In contrast to the naive semtree approach, partykit tests a fitted model in a node for parameter instability with respect to any of the partitioning variables. If there is significant parameter instability, the node is eventually split at a point on the covariate with the greatest instability into two locally optimal segments. If an M-estimator is used to fit the model, parameter instability of the fitted model with respect to a covariate can be detected through the generalized M-fluctuation test (Zeileis & Hornik, 2007). The null hypothesis of the generalized M-fluctuation test is rejected if the empirical fluctuation during parameter estimation with respect to a covariate is improbably large.
Following Stefanski and Boos (2002), an M-estimator 

The generalized M-fluctuation test uses the function
The generalized M-fluctuation test rejects the null hypothesis of “no structural change” when the empirical fluctuation process becomes exceptionally large in comparison to the fluctuation of the limiting process. This limiting process is represented by the limiting distribution which can be approximated as closed form solutions to certain functions. If closed form solutions are not possible, critical values for hypothesis testing can be simulated “on the fly” (Zeileis, 2006a). Although solutions in closed form are faster, the p-values can be calculated very quickly in this way. The generalized M-fluctuation test is provided in the strucchange package (Zeileis et al., 2002).
Note that the function
In every node of a decision tree partykit tests for parameter instability. If there is overall parameter instability in the current node, that is, if the instability test for any of the partitioning variables falls below a prespecified significance level, the partitioning variable
Compared to the naive semtree approach, one advantage of partykit is reduced computation time. To apply the generalized M-fluctuation test to all partitioning variables, the model needs only be fitted once. Split point selection, however, is more time consuming because the model has to be fit for all possible segmentations of the selected partitioning variable.
The idea of testing a fitted model in a node for parameter instability with respect to the partitioning variables is also used in the “score-guided” semtree approach (Arnold et al., 2021), which supersedes naive semtree. As with the partykit method, the first step of the algorithm is to select the partition variable. This is done in the same way as in partykit, through the generalized M-fluctuation test.
The key difference between partykit and score-guided semtree is that the latter performs a different procedure than partykit for selecting the split point given a selected partitioning variable. Instead of calculating the log likelihoods for all possible rival segmentations, score-guided semtree identifies which of the unique values of a partitioning variable maximizes the respective score-based test statistic (Arnold et al., 2021, p. 8). As a result, the model only needs to be fitted once at each node of the decision tree. Compared to the partykit method, score-guided semtree can further reduce computation time in the construction of the decision tree. For the generalized M-fluctuation test, both partykit and score-guided semtree use the supLM (or equivantly maxLM) test statistic for metric covariates and the LMuo statistic for categorical variables (see Merkle & Zeileis, 2013). Score-guided semtree uses the maxLM statistic for ordered variables (maxLMo) (Merkle et al., 2014). All these test statistics are implemented in the strucchange package.
A drawback of naive and score-guided semtree as well as partykit is their instability towards small changes in the data because of the hierarchical nature of the tree growing process. The position of a split point in the partition determines how the sample is split up in new nodes. The position of the split point as well as the selection of the splitting variable, however, strongly depend on the particular distribution of the data. The entire structure of the tree could be altered if one splitting variable or split point was chosen differently (Strobl et al., 2009).
Recursive Partitioning for Multidimensional Graded Response Models
As mentioned in Section 2.2, recursive partitioning can be applied to any kind of parametric model that is fitted using an M-estimator (e.g., maximum-likelihood). Komboz et al. (2018) propose a recursive partitioning algorithm to detect DIF in the Partial Credit Model (PCM), called PCM Tree. The PCM is another model from the IRT framework. The PCM Tree algorithm includes a global test for measurement invariance. If there is significant item parameter instability with respect to any of the covariates Z
r
in
In PCM Tree, only one latent variable ξ can be considered in the models that are associated with the tree’s nodes and thus multidimensional graded response (MGR) models cannot be handled. A direct analogue to PCM Tree for MGR models would draw on full information parameter estimation in the tree growing process (see Schneider et al., 2021). In Supplemental Material S3, however, we establish that model based recursive partitioning for MGR models using the full information approach is rarely feasible due to enormous computational costs. Thus, in order to conduct MOB for MGR models, computationally efficient approaches are needed.
We present and compare practicable methods to test and control for differential item functioning for complex survey scales and large scale survey data. Particularly, we suggest to combine the limited information approach for parameter estimation (Section 2.1) and recursive partitioning algorithms (Section 2.2) in order to efficiently compute MGR model based decision trees and to evaluate the resulting models with regard to model fit.
Recursive Partitioning for Multidimensional Graded Response Models: Single Tree
In this section, we introduce different ways to efficiently compute a single recursive partitioning tree for MGR models. We distinguish between the tree growing process (first step) and the terminal node model estimation process (second step). On this basis, we draw on different estimators to detect subgroups with DIF and to estimate fit indices and parameter estimates in an MGR modeling context. We present three algorithms, utilizing the semtree and the partykit packages (Section 2.2). The proposed methods are summarized schematically in Supplemental Material S1 in Algorithm 1, 2, and 3. Note that the algorithms differ with respect to the tree growing process as implied by the different packages used.
To start tree growing with the naive semtree approach, numerous models have to be fitted for which the log likelihoods are then compared with the template model. In the first step of the partykit method and the score-guided semtree method, the score function (see equation (10)) is used to build the tree structure. Usually, the MML estimation method is too computationally expensive for these approaches (see Supplemental Material S3). To efficiently calculate log-likelihoods for naive semtree and the score function for partykit and score-guided semtree, we propose to use (limited information) ML estimation in the tree growing process, that is, parameter estimates are computed by minimizing the objective function of the ML estimator (equation (6)). Thus for all three algorithms, we compromise on our assumptions about the distribution of the response variables. In the first step of the proposed recursive partitioning approaches for MGR models, information is used that is based on the assumption that the observed variables follow a continuous multivariate distribution. This may lead to problems in the tree growing process. In this study, we therefore analyze tree stability using data with simulated numeric response variables (based on a traditional CFA model) and compare the resulting trees to those grown using data with ordinal response variables (based on a MGR model).
Note that for partykit and semtree for MGR models, the M-fluctuation test uses the partial derivative of the objective function with respect to the model parameter vector
In the second step of our proposed algorithms, the parameter and model fit estimates of the models that are stored in the terminal nodes of the decision tree are calculated using the distribution free weighted least squares (WLS) estimator. Thus, for evaluation of the resulting decision tree, the model fit indices in the terminal nodes are estimated under consideration of non-normally distributed response variables and the existence of the threshold relation between the response variable vector
Recursive Partitioning for Multidimensional Graded Response Models: Forests
While the outlined methods allow to efficiently grow a single decision tree, this method may be slightly inaccurate because MGR model assumptions are compromised. At some splitting points in the decision tree, variable and split point selection may be different if the objective function considered all parameters and distributional assumptions of the MGR model (see also Supplemental Material S2). Also, a single decision tree can be vulnerable to small changes to the data and to the set of partitioning variables. This is a consequence of the hierarchical nature of the splitting process (Brandmaier et al., 2016; Kern et al., 2019)—the selection of one particular partitioning variable
Using the computation time saving method described above, we are able to tackle the problem of unstable and potentially inaccurate trees by computing several structurally different trees and evaluating the compiled results of the tree ensemble. As the computation of a decision tree using partykit and score-guided semtree is considerably less time consuming compared to the naive semtree approach (Arnold et al., 2021) we only consider these methods (i.e., Supplemental Material S1, Algorithm 2 and 3) as base learner in the ensemble.
We are guided by the concept of random forests, a method that uses an ensemble of decision trees rather than a single one to enhance prediction performance (Breiman, 2001a). We use random split selection to grow decorrelated trees for the ensemble that are structurally different from each other. In this procedure, random selections of partitioning variables are made. The selection of partitioning variables is redrawn at every node in a decision tree. This way, we encourage that all partitioning variables are considered at least once, even if a small number of trees are computed. Another technique used in the random forest framework is bagging. If bagging is used, the tree growing algorithm is applied to a bootstrap sample drawn from the full sample at every iteration. However, we refrain from using bagging together with recursive partitioning for MGR models. We want to ensure that the parameter estimates in the subgroups that are found by the algorithm are directly replicable. This is necessary to ensure that the fit indices of the fitted models are comparable between the trees.
The steps performed to grow a forest of partykit trees or score-guided semtrees for MGR models are summarized in Supplemental Material S1 in Algorithm 4. Multiple decision trees are grown using either partykit or semtree for MGR models (see section Recursive Partitioning for MGR models: Single Tree) with random sampling of partitioning variables at each node. After multiple decision trees are grown, the fit indices of the fitted models in the terminal nodes of each decision tree are evaluated. In this step, fitted models in terminal nodes that don’t exceed a predefined cutoff criterion (χ2-test p-value or RMSEA cutoff) are selected. The forest outputs a list of subgroups for which the proposed MGR model holds and DIF is present.
Simulations
Measurement Model
We test and compare the presented recursive partitioning techniques for MGR models with simulations. For this, a multidimensional graded response model needs to be defined. In the following, the simulated data is created based on the assumptions of the probit multistate IRT model with latent item effect variables for graded responses (PIEG, Classe & Steyer, 2023a).
The PIEG model is a multistate model with latent item effect variables for ordinal observables. For every category of a response variable, one category-specific latent state variable τ ikt for category k of item i at time point t is defined in the PIEG model. One reference latent state variable η t , which is equal to the latent state variable of the reference item τ11t, is assumed for every time point of measurement. The latent item effect variable β i is defined as the difference between the latent state variable of the reference item and the latent state variable of another item. Thus, there are as many latent item effect variables as there are items, minus the reference item. In this model, variances and covariances of latent state variables, and latent item effect variables as well as the covariances between latent item effect variables and latent state variables are estimated. The model’s discrimination parameters are all fixed at 1. For our application, all threshold parameters are freely estimated.
To simulate data on the basis of the PIEG model, we define three reference latent state variables η
t
and two latent item effect variables β
i
. We are thus mimicking a longitudinal setting with data collected for three time points. The proposed latent variables are derived from three items, respectively, resulting in nine five-category ordinal response variables Y
it
. The model structure is shown in Figure 1 in Supplemental Material S1. The cumulative category response function of the PIEG model is
To additionally simulate data with which ML estimation can be performed without compromising model assumptions, we define a traditional CFA model for which the response variables are numerical and follow the normal distribution. The model function is
For all data sets, several partitioning variables Z r ∀ r = 1, …, R are simulated. Different subgroups R h ∀ h = 1, …, H for which DIF is present may be defined as different areas on the (multidimensional) distribution of these partitioning variables.
Simulation Setup
We create simulated data to test and compare the performance of partykit, naive and score-guided semtree for MGR models. Single decision tree approaches are applied to the first set of simulations (simulation 1) while ensemble techniques are applied to the second set of simulations (simulation 2). We conduct additional simulations to test the performance of the generalized M-fluctuation test under misspecification in Supplemental Material S2. R implementations of the proposed methods and replication materials for all simulations are provided in the following OSF repository: https://osf.io/sv35m/?view_only=6cdde2777b914322b32ca00ad567ff2b.
Simulation 1
The samples of simulation 1 each consist of 2000 observations with values on 17 variables. There are no missing data points in the samples. We simulate 9 response variables in two ways: One set of samples with ordinal response variables that are based on the model function in equation (11) (see Figure 1). We also created a set of numeric samples that are based on the model function in equation (12). For each (ordinal and numeric) sample, we created two ordinal variables (cat1 and cat2) with scores on a five-point Likert Scale and one numerical variable (num1) ranging from 1 to 200. Those three variables are relevant partitioning variables. This means that they allow to distinguish between four subgroups with 500 observations in each group. Additionally, for each sample five random partitioning variables (rand1 to rand5) were simulated that do not systematically differentiate among the four subgroups. There are two numerical and three ordinal random partitioning variables. Results of single sample application of simulation 1. (a) Partykit for MGR models. (b) Score-guided semtree for MGR models. (c) Naive semtree for MGR models.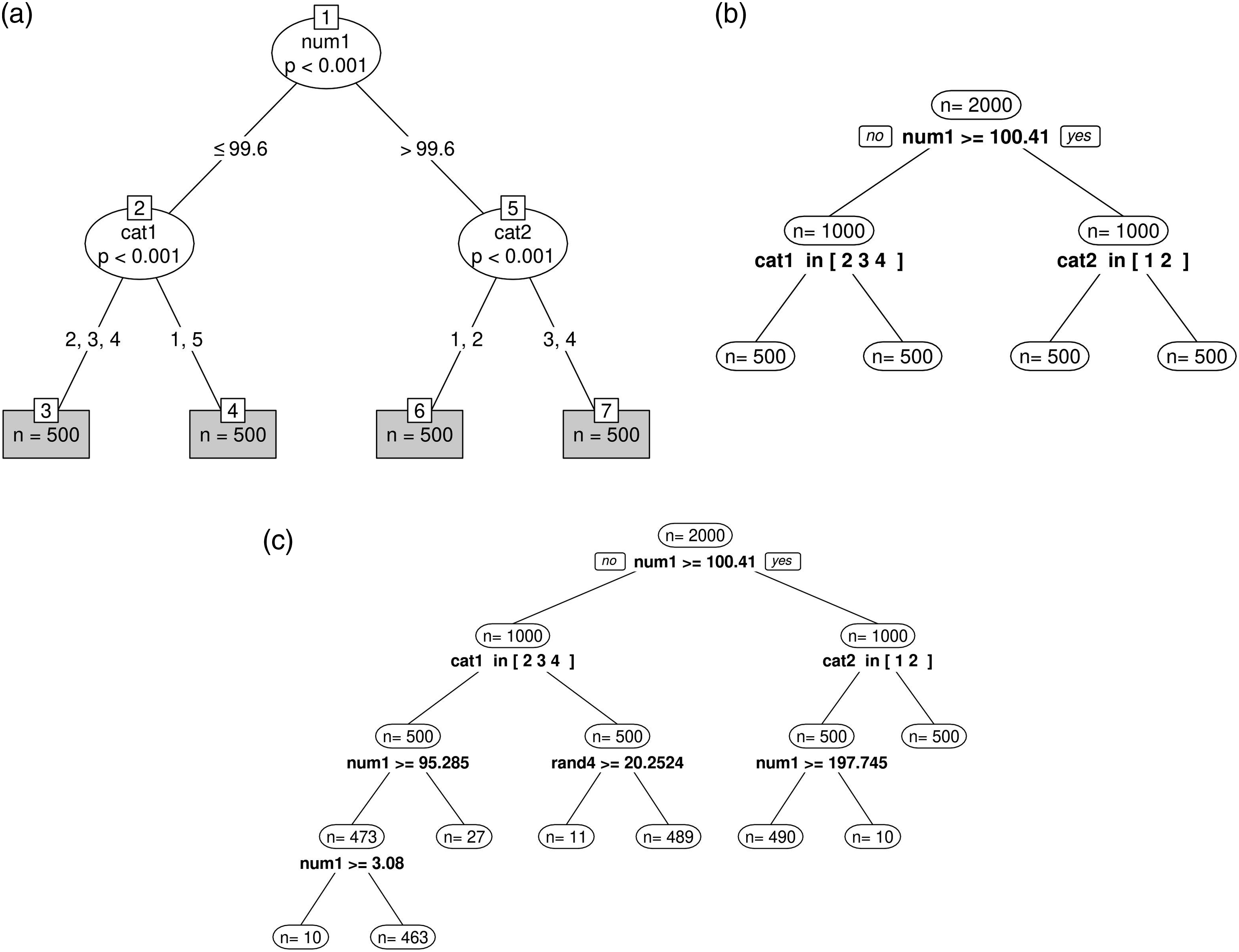
We simulated 100 ordinal samples and 100 numeric samples. For each sample, the data for each subgroup is simulated with a different set of parameters so that the model function in equation (11) (for the ordinal data) or equation (12) (for the numerical data) is true for each subgroup, but there is DIF in the overall sample. The true group-specific parameters differ between the samples. Intercepts and threshold parameters were sampled from a normal distribution, and latent variable variances and covariances were sampled from a uniform distribution. Further details and code for replication purposes is provided in the OSF repository. For each subgroup within one single sample, the values on the relevant partitioning variables are simulated such that each subgroup is exclusive with respect to the values of the relevant partitioning variables. Additionally, the structure of the simulated sample can be broken down by a single decision tree. The subgroups are defined as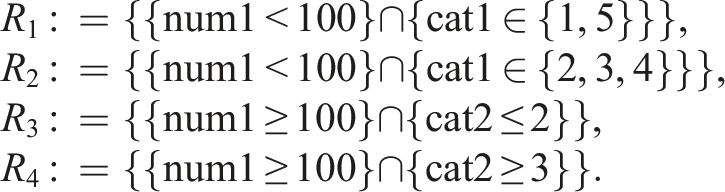
We conduct the simulation analysis in two steps. In the first step, we apply partykit, naive and score-guided semtree for MGR models to one single ordinal sample of simulation 1 to test if the methods are able to detect DIF and to compare runtime results for a sample that has a clear subgroup structure. In the respective model setup, we do not impose constraints on the minimum sample size in the terminal nodes. Bonferroni adjustments are applied at every node to correct for the multiple comparisons arising from the repetition of the generalized M-fluctuation test (for partykit and score-guided semtree) or of the LR-test (for naive semtree). The number of hypothesis repeated at every node is equal to the number of partitioning variables used.
The PIEG model fit the four subsets of this sample very well (R1: RMSEA
In the second step, we apply partykit and score-guided semtree to all 100 ordinal and 100 numerical samples and analyze tree stability across simulations.
Simulation 2
The samples of simulation 2 each consist of 2000 observations on 18 variables. Again, there are five random partitioning variables in these samples. In addition, there are four relevant partitioning variables: cat1 (categorical), cat2 (ordinal), num1 (numerical) and dicho1 (dichotomous). The relevant partitioning variables differentiate among two (exclusive) subgroups defined as
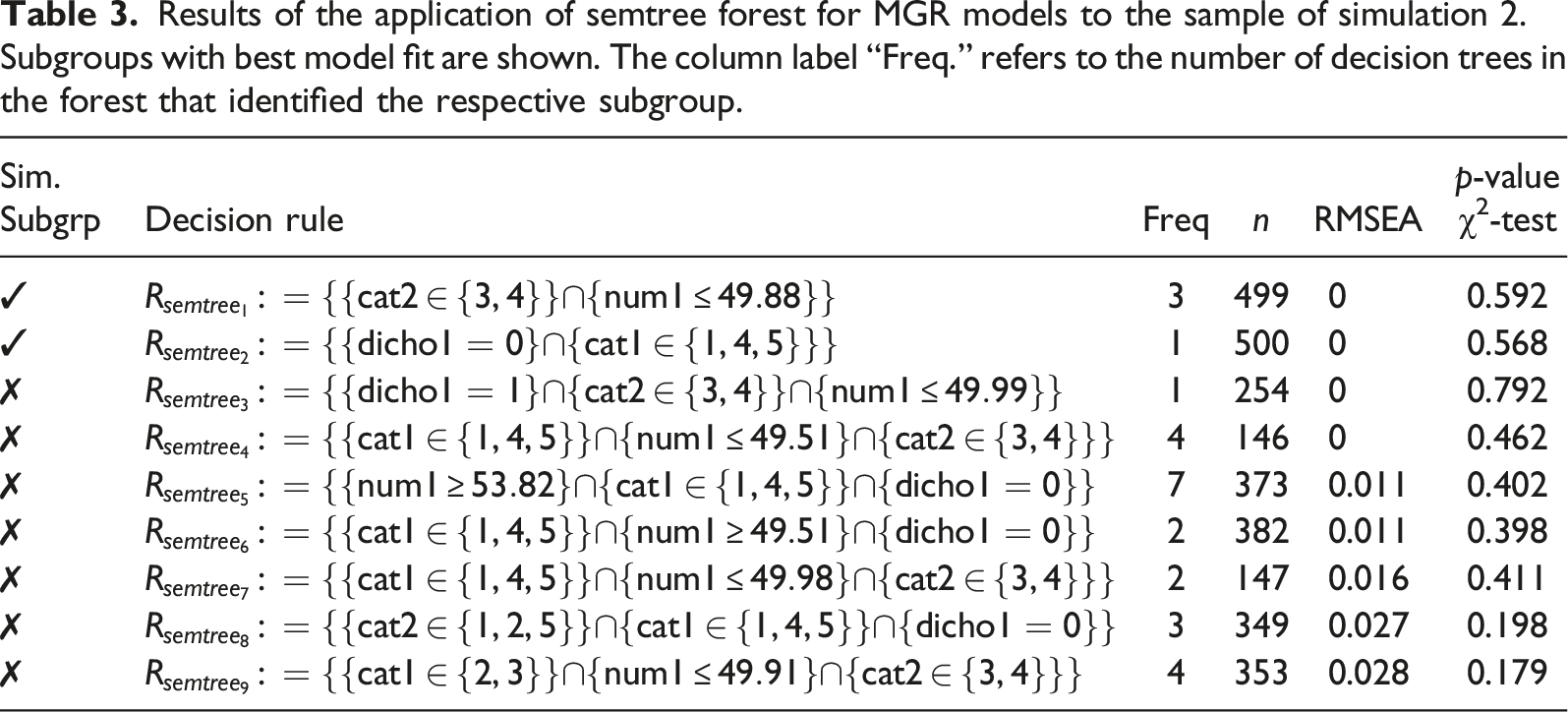
We again proceed in two steps. In the first step, we apply partykit and score-guided semtree forests to a single ordinal sample of simulation 2 to test whether the methods are able to detect DIF in a sample in which the subgroup structure is complex and the assumed MGR model does not hold for every individual in the sample. The data of half of that sample includes the same response variables as the initial sample of simulation 1 (i.e., except for the randomly generated data points). The partitioning variables are re-simulated. The input parameters are shown in Supplemental Material S1 in Table 1 and 2 in column R1 and R2. For every computed decision tree, we refit the models in each terminal node using the WLS estimator, and gather the model fit information. We compute an ensemble of 50 trees and set an RMSEA cutoff criterion of 0.05. The minimal size of the subgroups in the terminal nodes is set to 100 such that model parameters and fit indices can be estimated properly. Additionally, we set the number of variables randomly sampled as candidates at each split point to 3. For this data set, we defined the cat2 variable as categorical so that only two splits are necessary to retrieve the simulated subgroup R1 in a terminal node of a decision tree
In the second step, we compute score-guided semtree forests for all 100 ordinal data sets and for 100 numeric data sets and analyze the method’s ability to retrieve the two simulated subgroups from a complex sample structure across multiple samples. We computed ensembles of 20 trees using the same hyperparameters as in the single sample application.
Simulation Results
The results of the single sample application of simulation 1 are shown in Figure 1(a) (partykit), 1b (score-guided semtree), and 1c (naive semtree). When using partykit and score-guided semtree for MGR models (Figures 1(a) and (b)), all subgroups (R1 to R4) were retrieved correctly. For the naive semtree (Figure 1(c)), however, the algorithm did not stop splitting although the parameters in a terminal node are stable. These results indicate that partykit as well as score-guided semtree may be used for DIF detection in a sample that has a clear subgroup structure and for which the assumed MGR model is generally true. For the naive semtree method, on the other hand, it seems like the LR-test does not perform well with respect to numerical covariates.
When it comes to computation time, there are considerable differences between the three methods. The computation of the partykit tree took 361.5 seconds (6 minutes), the computation of score-guided semtree took 7.8 seconds, and the computation of the naive semtree algorithm took 4357 seconds (1.2 hours). These applications were conducted on a processor with a single core and 8 GB RAM. The runtime results show that naive semtree algorithm is computationally demanding and not a reasonable candidate for growing a decision tree ensemble. The modern, score-guided semtree, on the other hand, appears to be a considerably more practical method for the detection of DIF in MGR models, also in comparison to partykit. As it allows to choose from different types of score-based test statistics, semtree appears to be a good candidate to efficiently calculate robust tree ensembles.
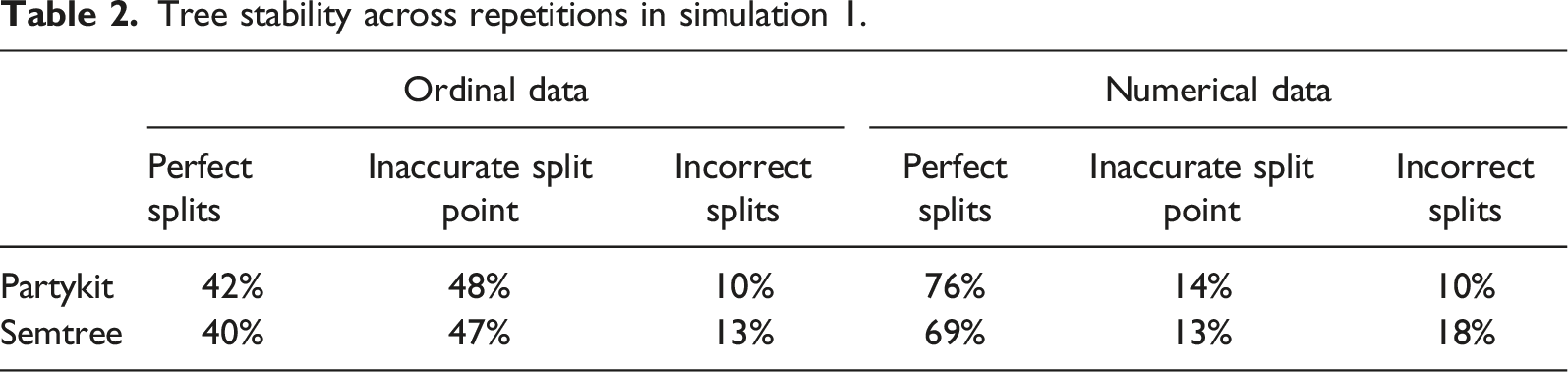
We analyze and compare tree stability results of 100-fold simulations between partykit and score-guided semtree as well as between ordinal and numerical response data. We define three levels of tree stability. A stable tree is defined as a tree in which all splits have been performed at the correct split points using the correct partitioning variables and all individuals in the sample are correctly distributed among the terminal nodes. An example for such a perfect split result is shown in Figures 1(a) and (b). The second level of tree stability is defined as a tree in which the split point on the numerical variable num1 has not been perfectly detected so that not all individuals in the sample are correctly distributed among the terminal nodes. An example for such an imperfect split result is shown in Figure 2(a). The third level of tree stability is defined as a tree in which one or more faulty splits have been performed. An example for such an incorrect split result is shown in Figure 2(b). Examples for tree instability in simulation 1. (a) Inaccurate split point selection. (b) Incorrect splits performed.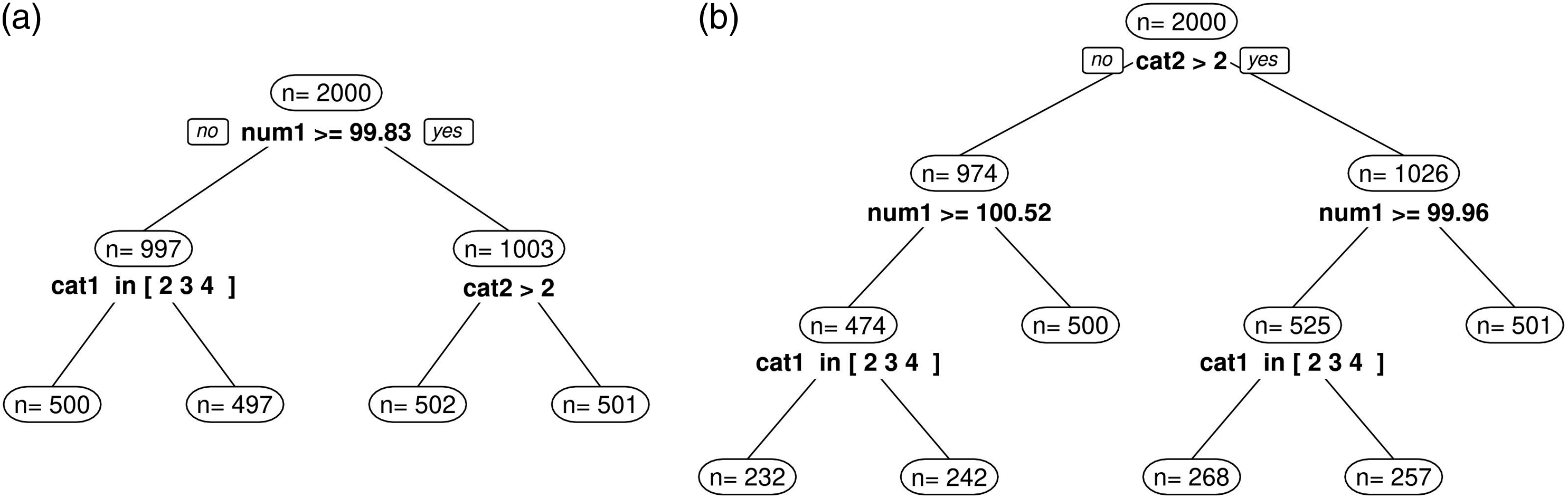
Tree stability across repetitions in simulation 1.
Results of the application of semtree forest for MGR models to the sample of simulation 2. Subgroups with best model fit are shown. The column label “Freq.” refers to the number of decision trees in the forest that identified the respective subgroup.
Results of the application of partykit forest for MGR models to the sample of simulation 2. Subgroups with best model fit are shown. The column label “Freq.” refers to the number of decision trees in the forest That identified the respective subgroup.
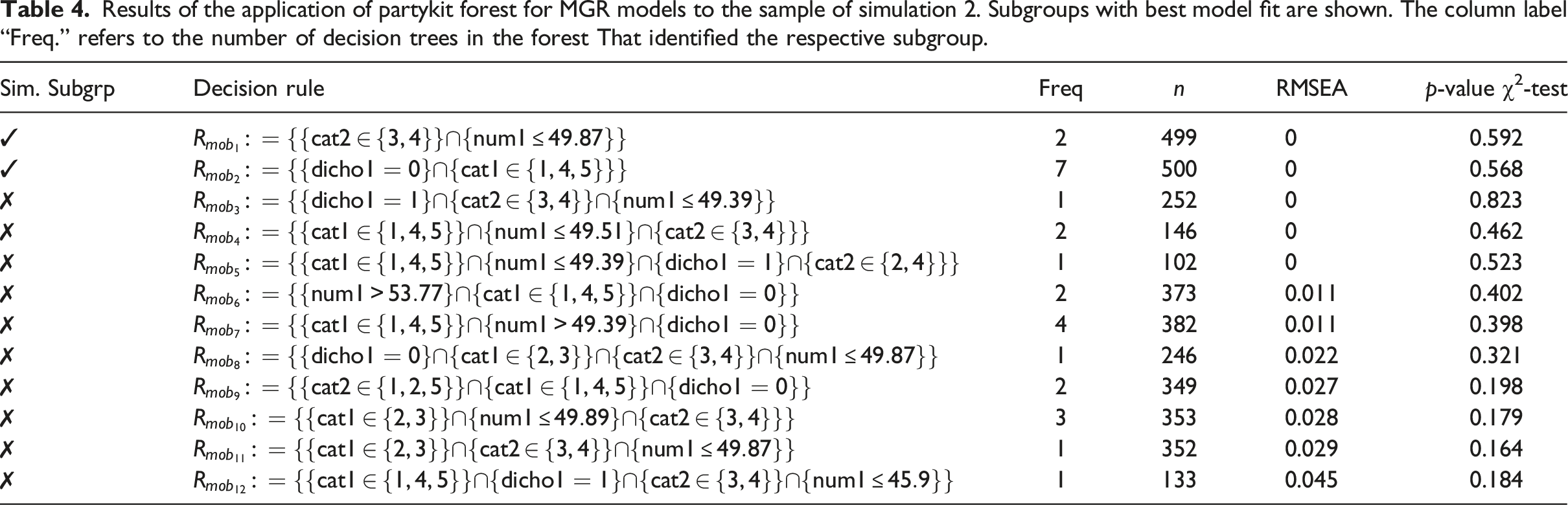
The runtime of partykit and semtree forest depend on the number of trees of the ensemble. Thus, holding the number of trees constant, semtree forest take considerably less time to compute than partykit forest. In simulation 2, the computation time of the single trees in the ensembles were on average comparable to the computation times in simulation 1, as some trees grew deeper and others stopped splitting at the root node. Note that growing a forest can be parallelized and therefore the computation time of recursive partitioning forests also depends on the number of available processing cores.
Repeating the application of semtree forests with 20 trees in each ensemble on 100 ordinal data sets resulted in 95% of the forests recovering at least one simulated subgroup (R1 or R2). Furthermore, 41% of the forests recovered both R1 and R2. The same application on 100 numeric data sets resulted in 78% of the forests recovering at least one simulated subgroup and only 18% recovering both subgroups. Thus, the problem of inaccurate selection of split points in the decision tree for ordinal data seems to be solved by using partitioning tree ensembles.
Discussion
Heterogeneity in survey samples is a common challenge when latent variable models are used to measure latent traits in substantive research. Survey data may include multiple, complex subgroups which can be subject to differential item functioning, and/or for which the implied measurement model does not hold altogether. Following the work of Strobl et al. (2015) and Komboz et al. (2018), we investigate several approaches for accounting for DIF in the most prominent type of multidimensional polytomous IRT model: the multidimensional graded response (MGR) model. By focusing on ordinal response scales and allowing for multiple latent variables, recursive partitioning for MGR models aims to tackle DIF in modeling contexts that are common in social scientific survey settings. We draw on three different recursive partitioning algorithms: naive and score-guided semtree (Arnold et al., 2021; Brandmaier et al., 2013) as well as partykit (Zeileis et al., 2008). As we utilize limited information estimation in building decision trees, we also propose practicable multi-tree extensions of partykit and semtree for MGR models. These approaches allow to account for instabilities in the tree growing process while maintaining computational feasibility.
In simulation 1, we demonstrated that partykit and score-guided semtree can be used to correctly find subgroups with DIF in MGR models. Comparing the algorithms using data in which the assumptions underlying ML estimation are compromised (i.e., ordinal response data) versus data in which these assumptions are not compromised (i.e., numeric response data) showed that there are not more incorrect splits performed with ordinal data. The results of the simulation study performed in Supplemental Material S2 support this finding as they indicate that different strucchange tests used on ordinal data do not perform worse than the same tests used on numeric data. However, compromising the MGR model assumptions during the tree growing process can lead to more inaccurate split points, at least for numerical partitioning variables.
The results of simulation 2 showed that a forest of semtrees is computationally more practical than a forest of partykit trees. The repeated application of semtree ensembles indicated that it is possible to retrieve subgroups with DIF from data with complex subgroup structures using tailored tree ensemble approaches. Our simulation also showed that applying such a tree ensemble method to numeric response data does not lead to better subgroup recovery. This result suggests that an ensemble method may be able to account for the instabilities of the tree caused by the compromised MGR model assumptions during tree growth. Note that in real applications, samples consist of complex subgroup structures anyway, and tree instability may be present even if the assumptions of the underlying model are not compromised. We may thus conclude that partykit and (ensembles of) semtree for MGR models represent useful tools for researchers working with multidimensional latent variable models and ordinal items in survey data.
Note that in extending recursive partitioning for MGR models to a tree ensemble method, we do no longer focus exclusively on detecting DIF. We rather consider the possibility that the assumed model structure underlying the ordinal items does not hold for all subgroups of the sample. Additionally, we acknowledge that the subgroup structure may be too complex to be disentangled by a single decision tree. In other words, an ensemble of recursive partitioning trees for MGR models recognizes that traditional data models, such as MGR models, are often not complex enough to accurately represent the internal processes of all respondents in deciding which categories to check off on survey scale items. It is rather likely that the assumption of a fixed model structure with stable parameters does not hold for every individual in every context. In these cases, parameter heterogeneity and model fit heterogeneity can be expected.
For this reason, we use a hybrid approach that includes an algorithmic model (random forest) and a data model (multidimensional GRM). Methods from the algorithmic modeling culture assume that natural mechanisms that produce data are unknown. Algorithmic models are usually used as “black boxes” to predict outcomes of such natural mechanisms (Breiman, 2001b, p. 205). Models from the data modeling culture, on the other hand, are typically restrictive explanatory models used to estimate parameters that are then used to test causal explanations. Algorithmic models need to be flexible enough to approximate the data generating mechanism well while also being robust to changes in the data. This compromise is referred to as the bias-variance trade-off in the algorithmic modeling literature (Hastie et al., 2009, p. 37). A recursive partitioning ensemble reduces bias by identifying various decision rules and associated parameter values for which the assumed model fits. It is these decision rules that lead to conditions under which controlling for DIF in MGR models actually reduces bias. Variance in tree ensembles for MGR models, on the other hand, can be controlled via the minimum size of the subgroups in the terminal nodes. Further extensions to this end could include the use of bootstrap resampling in tree ensembles for MGR models.
Supplemental Material
Supplemental Material - Detecting Differential Item Functioning in Multidimensional Graded Response Models With Recursive Partitioning
Supplemental Material for Detecting Differential Item Functioning in Multidimensional Graded Response Models With Recursive Partitioning by Franz Classe, and Christoph Kern in Applied Psychological Measurement.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.