
Abstract
Interconnected microgrid systems (IMSs) provide a strong foundation for improving the effectiveness of multiple distributed energy resources (DERs); however, operating numerous DERs in tandem remains a major obstacle. This paper presents a distributed control strategy (DCS) based on a federated learning (FL) fuzzy-optimised recurrent neural network (F-RNN), which uses an adaptive fractional-order proportional–integral–derivative (FOPID) controller to regulate frequency deviation. The control problem is formulated as a fractional-order consensus control strategy, using a Lyapunov-based framework that captures the dynamic behaviour of the RNN. Controller parameters are obtained from the dynamics of the energy function to update neuronal states, whereas FL is used during training to enhance network performance through improved information exchange. The proposed controller was demonstrated in Simulation/MATLAB and in real-time OPAL-RT Hardware-In-The-Loop under various conditions like load-demand uncertainty, stochastic loads, presence or absence of communication delay, communication link failure and source loss. Results based on quantitative analysis show that the proposed controller will be superior to the conventional controllers. More specifically, the proposed controller provides up to 73% reduction in integral absolute error, 33% lowering of the integral time absolute error, and greater than 70% improvement in integral time-weighted squared error as compared to the RNN–FOPID controller. The settling time has been improved from approximately 6.1 s down to 3.0 s with the peak frequency deviation being reduced by nearly 80%, illustrating the improved damping and transient performance of the proposed method.
Keywords
Introduction
The high availability of renewable energy sources (RES) with no inertia in islanded microgrids creates constant challenges in maintaining frequency stability due to frequent generation/demand imbalances (Salitha et al., 2026). To enhance the system's resilience, flexibility and security against large disturbances, natural disasters and adverse weather conditions, microgrids are connected through tie lines to create interconnected microgrid system (IMS) (Mu et al., 2026). These connections help to share power, increase system inertia and enable peers to trade energy among themselves, thereby reducing the dependence on the utility grid. With the large-scale integration of DESs, the operation of IMSs is becoming increasingly complex due to bidirectional power flow, fluctuating renewable generation, and dynamic load variations (Chakraborty et al., 2026). Consequently, to achieve synchronised frequency regulation and effective power sharing between IMSs, advanced control strategies must be employed, given the constraints imposed by communication limitations and uncertain conditions. Thus, for IMSs to remain stable and operate reliably, it is necessary to develop distributed control strategies (DCSs) that are sufficiently scalable and robust.
Related works
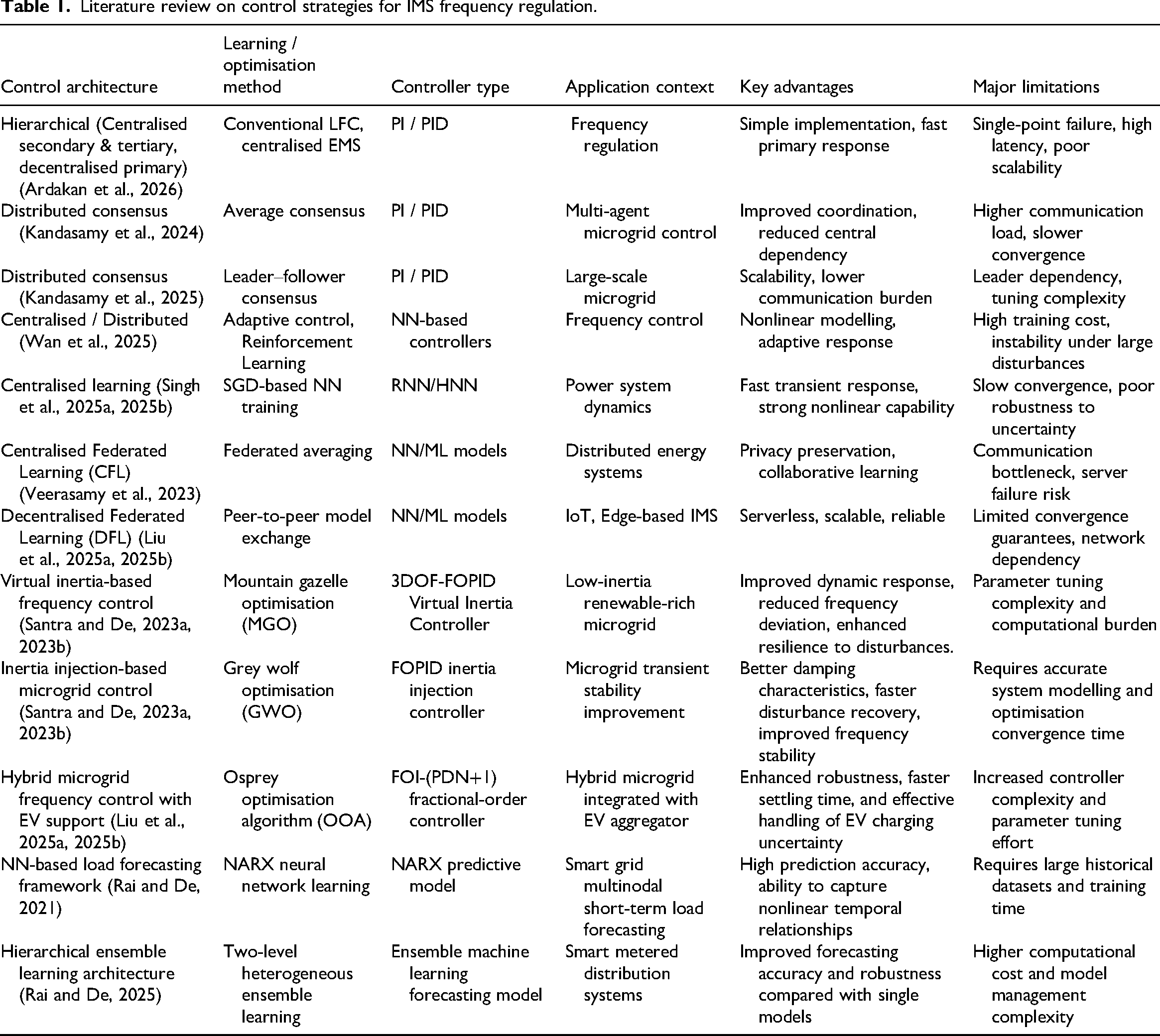
In most cases, hierarchical control systems are designed for controlling power IMSs. Secondary and tertiary control methods employ centralised load frequency control (LFC) and centralised energy management, while primary control is generally decentralised, with primary control devices responding quickly to frequency disturbances (Ardakan et al., 2026). Centralised control can fail globally at a single point, leading to increased communication latency, increased computational load, and difficulties scaling as distributed energy resources (DERs) increase. Nevertheless, decentralised control schemes mitigate some of these drawbacks by relying solely on local measurements; however, they often result in suboptimal frequency regulation due to a lack of coordination among DERs (Kandasamy et al., 2024). Control strategies based on distributed consensus have attracted significant attention to avoid the constraints of centralised and decentralised approaches. The robustness and adaptability of microgrids are enhanced by these strategies, which allow them to coordinate through limited information exchange with neighbouring agents (Kandasamy et al., 2025). The combination of attention mechanism and neural networks (NNs), used in a previously published intelligent vibration prediction method, can be applied to detect abnormal faults in elevator door systems by utilising time–frequency domain features. This improves the accuracy of fault diagnosis and facilitates timely anomaly detection in the system (Wan et al., 2025). Average consensus and leader-follower consensus approaches have been examined; however, the latter offers greater scalability and lower communication requirements. Recent research has integrated intelligent control techniques, including adaptive controllers, reinforcement learning and NNs (Singh et al., 2025a, 2025b) to improve frequency regulation performance. Recurrent neural networks (RNNs) and Hopfield neural networks (HNNs) have demonstrated robust nonlinear modelling capabilities and rapid dynamic responses. Nevertheless, most NN-based controllers rely on stochastic gradient descent (SGD) with local data, resulting in sluggish convergence, limited adaptability and degraded performance during uncertainties (Jiang et al., 2017). Mei et al. (2025) present a data-driven prediction method of current for permanent magnet synchronous motor drives using differential NNs. This reduces the prediction error of the cascaded model and increases dynamic performance, which in turn paves a way for more accurate control and enhanced monitoring of motor drive systems. Fuzzy logic-based optimisation is a successful method for addressing the uncertainty and imprecision encountered in many real-world optimisation problems; it iteratively improves the initially specified solution values using a set of fuzzy inference rules until the desired solution quality is achieved. Fuzzy sets are established by employing linguistic variables that articulate the strength of membership for each possible value in a set, as opposed to using specific numeric limits stipulated by exact definitions for every value. Fuzzy logic is used to formulate optimisation problems by associating input membership functions with an output that determines both the optimality and the quality of potential solutions. Compared to more traditional optimisation techniques, fuzzy logic offers several advantages, including robustness to uncertainties, greater flexibility in accommodating imprecision in products and services, suitability for complex/nonlinear systems and the provision of adaptive fuzzy logic controllers (AFLCs) compared to other types of controllers. Specifically, AFLCs are more intuitive and user-friendly because they rely on linguistic rather than mathematical rules, use very simple rule structures and produce outputs that are easy to interpret. However, AFLCs perform well only with expertise in fuzzy rule development from an application perspective, meaning the person creating effective fuzzy rules must gain significant experience. Also, because of large numbers of input variables or high degrees of complexity, AFLCs require more computational resources than traditional control techniques. AFLCs have received growing attention in recent days as an effective solution for controlling nonlinear, uncertain and time-varying systems. Unlike conventional FLCs with fixed membership functions and rule bases, AFLCs incorporate online adaptation mechanisms that tune controller parameters in real time based on system performance, thereby improving robustness and dynamic response. Recently, applications of AFLCs are in power systems, such as LFC, RES-based microgrids and hybrid electric vehicle (HEV) energy management, where AFLCs consistently outperformed classical PI/PID and fixed fuzzy controllers in terms of settling time, overshoot reduction and disturbance rejection. Several studies further enhance AFLC performance by integrating adaptive laws based on Lyapunov stability, optimisation algorithms or type-2 fuzzy logic to better handle modelling uncertainties and external disturbances (Beşkardeş et al., 2024). Overall, the recent study confirms that AFLCs provide a flexible and model-free control framework with superior adaptability, making them a strong candidate for modern complex control applications, particularly in microgrid energy management (Mansour et al., 2025) and for nonlinear systems (Wang et al., 2022). FL is a recently emerging distributed learning paradigm that enables collaborative model training across multiple participants without sharing raw data, thereby improving scalability while preserving data privacy. Since its introduction by Google in 2016, FL has evolved from early applications such as mobile keyboard prediction to a broader framework supporting federated analytics, collaborative computing and distributed inference. Due to its inherent privacy-preserving capabilities and ability to exploit geographically distributed data sources, FL has been widely investigated across diverse domains, including the Internet of Things (IoT), healthcare, intelligent transportation, energy systems, manufacturing, agriculture, remote sensing, robotics, autonomous systems and distributed optimisation. Apak et al. (2026) proposed a personalised federated learning (FL) framework based on a blockchain to improve drug recommendation systems robustness against model poisoning attacks. They combine the benefits of blockchain and FL to achieve secure and privacy-preserving distributed model updates in a secure, trustworthy and transparent manner. As a distributed FL framework, are developed to apply cross-domain remaining useful life prediction with no sources. Knowledge transfer across varying operating conditions: the method allows knowledge to be transferred through domain adaptation without needing access to source data, enhancing predictive fidelity and generalisation with specific usage for industry (Zhang et al., 2026a, 2026b). FL possesses various complexities and challenges, which have been extensively investigated, such as data heterogeneity, communication overhead, privacy preservation, and model convergence. This study gives insight into the existing solutions and points out research directions towards improving the efficiency and scalability of FL systems (Thakur et al., 2025). Most past research on FL has focused on centralised federated learning (CFL), in which a centralised server manages all client participation and combines individual model updates submitted by each client (Veerasamy et al., 2023). CFL provides a reasonable trade-off between effective learning and privacy, but it presents certain disadvantages, including (i) communication bottleneck issues (Ma et al., 2019), (ii) the threat posed by failure of the centralised server, and (iii) limited scalability of deployment to large or resource-limited environments. Because of these disadvantages with CFL, the investigation of decentralised federated learning (DFL) has recently attracted significant attention due to its potential as a serverless method that enables clients to share models directly, thereby avoiding the need for a single centralised aggregator. DFL not only can greatly reduce communication overhead by removing the need for a centralised aggregator but also offers greater reliability and flexibility in network configuration. Therefore, DFL is very well suited to address challenges arising in IoT and Edge Computing (Liu et al., 2025a, 2025b). The implementation of FL and DFL for IMS in frequency control is a developing area; therefore, research is limited, and further examination of FL-based techniques is needed to provide viable solutions for large-scale distributed energy generation systems. A comprehensive literature review of control strategies for frequency regulation in IMS is shown in Table 1.
Literature review on control strategies for IMS frequency regulation.
At the same time, fractional-order proportional–integral–derivative (FOPID) controllers are becoming increasingly widely used due to their superior flexibility and robustness. However, determining the best way to tune the parameters of an FOPID controller in a distributed environment with random disturbances and communication delays will remain a significant challenge. In recent years, the literature has tended to focus more on modelling of frequency control robustness under communication delays and cyber threats in addition to system uncertainties typical for modern power systems. As an example, hybrid optimisation techniques driven by artificial intelligence (AI) have been used to design robust single-parameter frequency controllers that can maintain stability in latency-sensitive and cyber-vulnerable scenarios (Deep et al., 2026). Likewise, maximum sensitivity-based robust latency compensators in addition to superconducting magnetic energy storage (SMES) units have also shown superior dynamical performance with respect to frequency regulation of microgrids (Kumar et al., 2024a, 2024b, 2024c). More advanced controller structures, such as tilt integral derivative (TID) controllers and tri-parametric fractional-order controllers, exhibited excellent adaptability or resilience in isolated microgrids under cyberattack or delay conditions. To overcome cybersecurity attacks and communication latency in power systems, a resilient tri-parametric fractional-order frequency control strategy is developed. Since an improper delay causes the control systems to become invalid or ineffective, the proposed method effectively mitigates the adverse effects of delays and malicious attacks on frequency regulation, which improves system robustness and stability (Aryan et al., 2025). A novel integral dual fractional derivative frequency controller has been developed for thermal power plants, including the time delay effect. The controller design is proposed to enhance dynamic performance and guarantee variation of working conditions and system uncertainties frequency (Kumar et al., 2025a, 2025b). The methods of isolated hydropower plants have significantly improved their stability and performance. Standalone systems (Singh et al., 2025a, 2025b) show that the approach proposes enhanced robustness against disturbances and variances of parameters through more effective frequency regulation. A stable control scheme has been put forward for coordinated automatic generation control (AGC) and automatic voltage regulation (AVR) in hydropower plants that are isolated from the grid. It improves stability of the system and gives steady performance under fluctuating load conditions and severe environmental disturbances (Deep et al., 2025). Running angular transmission despite imperfections is a challenging but promising field that can have several applications in its widespread use (Kumar et al., 2024a, 2024b, 2024c). The controller enhances frequency control performance by reducing the impact of delays and guaranteeing stability in an interconnected dynamic environment. In short, to address the scaling problems and random cyber-attacks in thermal power plants with communication delay, we have proposed a resilient frequency-shifted PID control strategy. The described approach increases resilience and ensures stable frequency control in unfavourable operating conditions (Aryan et al., 2024). Recent works also advanced intelligent optimisation techniques, incorporating equilibrium optimiser (EO)-tuned type-2 fuzzy ID-P controllers for enhanced LFC performance in multi-area systems with a deregulated environment (Anand et al., 2022) and type-2 fuzzy NN for fault diagnosis (Zhao et al., 2025). Together, these studies represent a clear trend toward the use of advanced, robust, intelligent and fractional-order control techniques to solve the unique problems posed by the emerging cyber-physical perspective of modern interconnected power systems (Kumar et al., 2025a, 2025b). Optimisation-based control systems have been proposed in recent years to improve frequency regulation in low-inertia microgrids. To improve the frequency stability of a small-inertia microgrid, an optimised three-degree-of-freedom FOPID virtual inertia controller has been proposed. Using this approach, the Mountain Gazelle Optimisation (MGO) algorithm is used to tune the parameters of the fractional-order controller and the virtual inertia mechanism. The proposed method can enhance dynamic response, reduce frequency oscillations and increase the system's resilience to load disturbances and renewable power fluctuations under low-inertia microgrid conditions. The results show that the performance of frequency control in renewable-rich microgrids can be significantly improved by combining optimisation algorithms with fractional-order controllers (Santra and De 2023a, 2023b). Metaheuristic optimisation tools have also been widely used to enhance the transient stability of microgrids. A proposed fractional-order PID inertia injection controller optimised with a grey wolf optimisation (GWO) to increase the transient stability of microgrids. The GWO algorithm is used to find the best controller parameters that yield improved damping and faster recovery from disturbances. The FOPID inertia injection mechanism can compensate for the reduced system inertia caused by integrating renewable energy systems into the petroleum industry. The proposed controller demonstrates superior performance in terms of frequency stability, reduced oscillations and dynamic response compared to common controllers (Santra and De, 2023a, 2023b), as shown by the simulation. A decentralised optimisation and planning approach for EV charging stations has been proposed to improve system performance by integrating charging infrastructure design towards sustainability (Feng et al., 2025). Another optimisation algorithm is the osprey optimisation algorithm (OOA) for optimising advanced fractional-order controllers. An FOI-(PDN+1) control structure has also been proposed for advanced frequency support of a hybrid microgrid with EV aggregators. This paper uses OOA to obtain optimal controller parameters for managing uncertainty in EV charging demand and variability of renewable energy. These techniques show results for frequency control, settling time and robustness compared to conventional control techniques. With additional flexibility and a distribution of energy control, this integration with EV aggregators helps further increase frequency stability (Santra et al., 2025). Moreover, a fast dynamic identification algorithm is proposed to identify the influence lines of key nodes in distribution networks with a high penetration degree of DGSs and EVs, which can improve system monitoring performance and enhance controllability (Liu et al., 2025a, 2025b). For efficient incorporation of EV and DG to support frequency stability in microgrids and IMS, these methods illustrate the requirement for advanced methods. In addition to higher-level optimisation tools, NN-based learning techniques have been extensively discussed in smart grid practices, especially for load and system prediction. To achieve complete frequency regulation and energy management in the current power systems, accurate load forecasting is important. To predict the short-term multinodal load, a nonlinear autoregressive exogenous (NARX) neural network model has been proposed for smart grids. The technique uses a contribution-factor-based approach to determine the impact of several nodes on the forecasting model. The model captures the complex temporal relationships in load demand patterns by exploiting the NARX neural network's nonlinear learning properties. This method greatly improves forecasting accuracy and contributes towards efficient operational planning for smart grids (Rai and De, 2021). Ping et al. (2026) proposed a blockchain-based framework for the peer-to-peer trading of energy through dynamically reconfigured distribution networks. This method enforces constraints on networks to maintain steady-state operation whilst supporting decentralised energy management and increasing the global flexibility of systems. The second approach is a two-level heterogeneous ensemble method based on machine learning for predicting loads in smart-metered distribution systems. As the name suggests, an ensemble of models is used hierarchically. The ensemble approach is better than single-model forecasting methods, since the combined learning algorithms capture distinct patterns in the load data. Heterogeneous ensemble learning is a promising approach to improve load-prediction accuracy in distribution systems that employ smart meters (Rai and De, 2025). FL–F-RNN–FOPID controller is a combination of FL with fuzzy inference systems, RNNs and FOPID control to provide adaptive dynamic behaviour control. In this process, RNNs capture how well a system operates dynamically; fuzzy rules optimally tune the FOPID controller parameters in an uncertain environment; and the FL approach facilitates collaborative parameter-based system estimation by allowing the transmission of parameterised information between different training locations without transmitting raw data. The combination of these methods provides increased robustness, improved scalability, and enhanced control performance in distributed, uncertain applications such as IMS.
Motivations and contributions
The aforementioned challenges drive this research work and aim to develop a distributed frequency-control framework for IMS that is resilient, scalable and adaptive.
There are two primary motivations:
the necessity for rapid and dependable frequency regulation in the presence of high-RES penetration and stochastic operating conditions, the inherent constraints of present distributed controllers in terms of adaptability and convergence speed, and the absence of integrated frameworks that incorporate FL, intelligent control and fractional-order control for IMS applications. To address these deficiencies, this research article proposes implementing a self-adaptive FOPID controller based on an FL–F-RNN within a consensus-based DCS.
The main contributions of this work are summarised below:
The secondary frequency regulation of IMS is facilitated by a novel FL–F-RNN–FOPID distributed control framework that enables coordinated operation with sparse communication. A Lyapunov-based stability framework is employed to formulate fractional-order consensus control, thereby ensuring robustness and system convergence. The integration of FL with fuzzy optimisation is designed to improve the efficiency, adaptability and convergence speed of learning while maintaining the distributed implementation. Various case studies are demonstrated, including typical load, uncontrolled stochastic loading, source loss, communication link failure and communication delay, with evidence of robustness to uncertainty. Hardware-In-The-Loop (HIL) Tests (OPAL-RT) showed that the control strategy worked well and was achievable.
Interconnected microgrid system model
IMS is a major change for modern power systems because it enables energy generation and distribution in a highly distributed, flexible and robust manner. Combining different types of renewable/non-renewable DESs with energy storage systems forms IMGs to provide reliable, long-lasting electricity at lower environmental impact (Lin et al., 2025a, 2025b). An IMS consists of a network of microgrids that can work together or independently with the utility grid. This makes operations more flexible and resilient, especially in remote and isolated areas. This research article talks about an IMS on a remote group of islands (Balasubramaniam et al., 2016). The IMS consists of three identical, interconnected microgrids that operate as a single system. Each microgrid has a total installed capacity of 3 MW and supplies local customers with their electrical requirements from various distributed generation sources – namely, micro-hydro (500 kW), solar (350 kW), wind (350 kW), biogas (500 kW), biodiesel (500 kW) and biomass (500 kW). In addition to these sources of generation, each microgrid contains one of two large energy storage systems (ESS): an alkaline electrolyser/fuel cell (AE/FC) rated at 150 kW, and a battery ESS (BESS) rated at 150 kW; both types serve to keep frequency and power balanced across the microgrids. The basic idea behind the IMS is to allow each distributed generator to operate at its full capacity while still meeting local demand. However, the high use of RESs, especially solar and wind, causes power instability and reduces system inertia, leading to unstable frequency. Figure 1 shows the schematic arrangement of the networked microgrids that make up the IMS. From a control and dynamic analysis standpoint, the plant is fundamentally nonlinear, uncertain and time-varying, and is vulnerable to external disturbances, unmodeled dynamics and parametric uncertainties. For frequency-response and control-design studies, such intricate nonlinear systems can be accurately approximated by linear time invariant (LTI) models via suitable linearisation at operating points. This modelling method simplifies calculations and controller design without compromising the control strategy's accuracy or the dynamic performance of a multi-energy microgrid (Lin et al., 2025a, 2025b). This research study employs a linearised IMS model for renewable generation units, such as solar photovoltaic systems, and a linearised converter-based model (Sen and Kumar, 2019). Stochastic generation profiles are used to show how power changes over time, since solar irradiance is not always constant (Zhang et al., 2026a, 2026b). The frequency response analysis also demonstrates the use of linearised transfer function models for wind and other RESs. Each generation and storage device will be described in detail, including their operation and control, in these sections.

The structure of IMS.
Biogas power generation (BGPG)
Carbon dioxide and methane are the two main gases that make up biogas, a renewable energy source (Kwilinski A et al., 2024). A fuel system, a way to start a fire, a speed governor and a valve actuator are among the most important parts of the complex system that collects and uses biogas (Zemin et al., 2025). In this, an engine that works as a prime mover changes biogas into mechanical energy. This engine is a key part of the energy conversion process and is closely linked to a synchronous generator. The automated speed governor on the biogas engine is one of the most important parts of this system. This part is necessary to accurately control the synchronous generator's real power output, ensuring a steady, controlled energy supply gives more in-depth information on how to use math models to handle the more complex parts of these operations. This mathematical model helps us understand and analyse how the different parts of the biogas system work together and how well they work (Barik and Das, 2018). Equation (1) shows the transfer function model of BGPG.
Biodiesel power generation (BDPG)
A diesel engine serves as the primary mover and is intricately linked to the synchronous generator via biodiesel, a renewable, biodegradable fuel. A speed governor system controls its operation based on changes in its frequency. It works like the governing systems in regular diesel engines, constantly adjusting to keep things running smoothly and at their best. The transfer function model of the biodiesel-driven system is given in detail (Barik and Das, 2018). This mathematical demonstration offers a comprehensive framework for understanding and evaluating the system's behaviour under diverse conditions by encapsulating the interactions among the biodiesel, the diesel engine, the synchronous generator and other components. Equation (2) shows the transfer function model of BDPG.
Micro hydro power generation (MHPG)
The MHPG system changes potential energy into electrical energy. Combining a generator and a hydro-turbine makes this process possible. A hydraulic pump and a propeller are two important parts of the operation process. They work together to turn the kinetic energy of flowing water into rotational motion. This spinning motion changes into something else, and the linked generator makes electricity as a result (Barik et al., 2021). They provide a comprehensive elucidation of the transfer function model, formulated to investigate the architecture of this micro hydro system. Equation (3) shows the transfer function model of MHPG.
Biomass power generation (BMPG)
BMPG is an eco-friendly way to make energy that turns organic materials from plants and animals into heat and electricity. This type of clean energy has become more popular because it can help people use less fossil fuels and produce less greenhouse gas. Biomass-derived biofuel is used to make both heat and electricity in BMPG. To produce the necessary biofuel, this process uses a variety of methods, including heat, biochemical reactions and biological processes. Barik et al. (2021) describe and explain in detail the complicated ways that these processes work together. The transfer function model of BMPG is given in equation (4).
Solar power generation (SPG)
Solar power plants use the sun's thermal energy to generate electricity. The photovoltaic system involves installing solar panels that focus sunlight and convert it directly into electricity, which may be fed to the grid (Li et al., 2025). The most popular type of solar plant is PV-based solar, as it is simple, reliable and cost-effective. These systems are usually large arrays of solar panels installed in the best positions to generate maximum energy. The solar PV systems may be ground-mounted or roof-mounted, and the ground-mounted systems may use either fixed structures or tracking systems, such as single and dual axis trackers, to track the sun's movement and enhance energy production (Harazin and Wróbel, 2022). The other type of SPG is concentrated solar power, in which mirrors or lenses concentrate sunlight onto a central receiver to generate heat, which is used to rotate a steam turbine to generate electricity. Solar irradiance, land area and panel orientation determine the performance of solar plants; modules are typically tilted towards the equator at an angle near the site's latitude to generate maximum power. The mathematical representation of the solar system, achieved through a linearised transfer function model, is given in equation (5).
Wind power generation (WPG)
One of the most promising technologies for large-scale renewable energy production is wind power. It has several advantages, including being clean and environmentally friendly, relatively low generation costs, minimal land use and easy operation and maintenance (Li et al., 2026). With these advantages, wind energy has received significant attention from governments worldwide and has experienced massive growth in recent years (Sahu, 2018). However, as wind power penetration in power systems increases, the randomness/intermittency of wind resources poses a challenge to power system operation (Zhang et al., 2025). These issues may affect the system's performance in terms of power quality, frequency stability, voltage regulation and transient stability (Lydia et al., 2014). The details of this mathematical model involve simplifying the representation by removing certain power conversion stages (Close et al., 2024). Therefore, to integrate wind farms successfully, provide grid stability and promote the safe and efficient operation of modern power systems, proper control and management of wind farms are necessary (Yang et al., 2025). Equation (6) provides the wind system transfer function model.
Battery energy storage system
Significant power fluctuations and frequency oscillations result from the considerable uncertainty introduced by wind- and solar-powered microgrids into their power generation. ESSs use bidirectional power conversion devices to get around this problem. These systems are crucial for providing auxiliary services that regulate the IMS's frequency. According to Veerasamy et al. (2022), the process is accurately represented and expressed by a modelling framework. Equation (7) provides the BESS transfer function model.
Aqua electrolyser and fuel cell
The AE receives a portion of the electrical energy from a microgrid to produce hydrogen gas. The FC uses this hydrogen as its primary energy source, particularly during blackouts. Equations (8) and (9) provide a linearised transfer function model of AE and FC, and are used to demonstrate the dynamics of this energy conversion process.

Proposed method: federated-learning-based F-RNN–FOPID for DCS
This section describes the RNN to design the self-adaptive FL–F-FOPID controller for distributed frequency control of the IMS. The detailed explanations of the FOPID, RNN–FOPID, F-RNN–FOPID and consensus-based FL–F-RNN–FOIPID are discussed as follows.
FOPID controller
Most research on FOPID controllers for industrial applications has been conducted over the last couple of decades. The concepts of integer- and fractional-order differentials and integrals are commonly used in both control engineering and process control, as well as in robotics and nuclear reactor control. This has led to a newfound interest in using FOPID controllers for LFC applications, as demonstrated in recent technical papers that show that fractional-order definitions of FOPID offer significant advantages in both modelling accuracy and flexibility in controller design. The FOPID controller transfer function in the s-domain is given in equation (10).
In this research, the optimisation of gain parameters is performed using FL-based fuzzy logic concept.
RNN–FOPID controller
The RNN is a dynamic, associative-memory-enabled, time-varying RNN. The dynamics of the network are characterised by a Lyapunov function built from the error, that is, the frequency deviation, in IMS. Determining the ideal gain values for the controller is made easier by minimising this inaccuracy. The following phases clarify the process of fine-tuning the FOPID controller:
Step 1: formulating the energy function
HNN can tune the FOPID controller's gain parameters by defining the error function to be minimised as a Lyapunov energy function, as shown below:
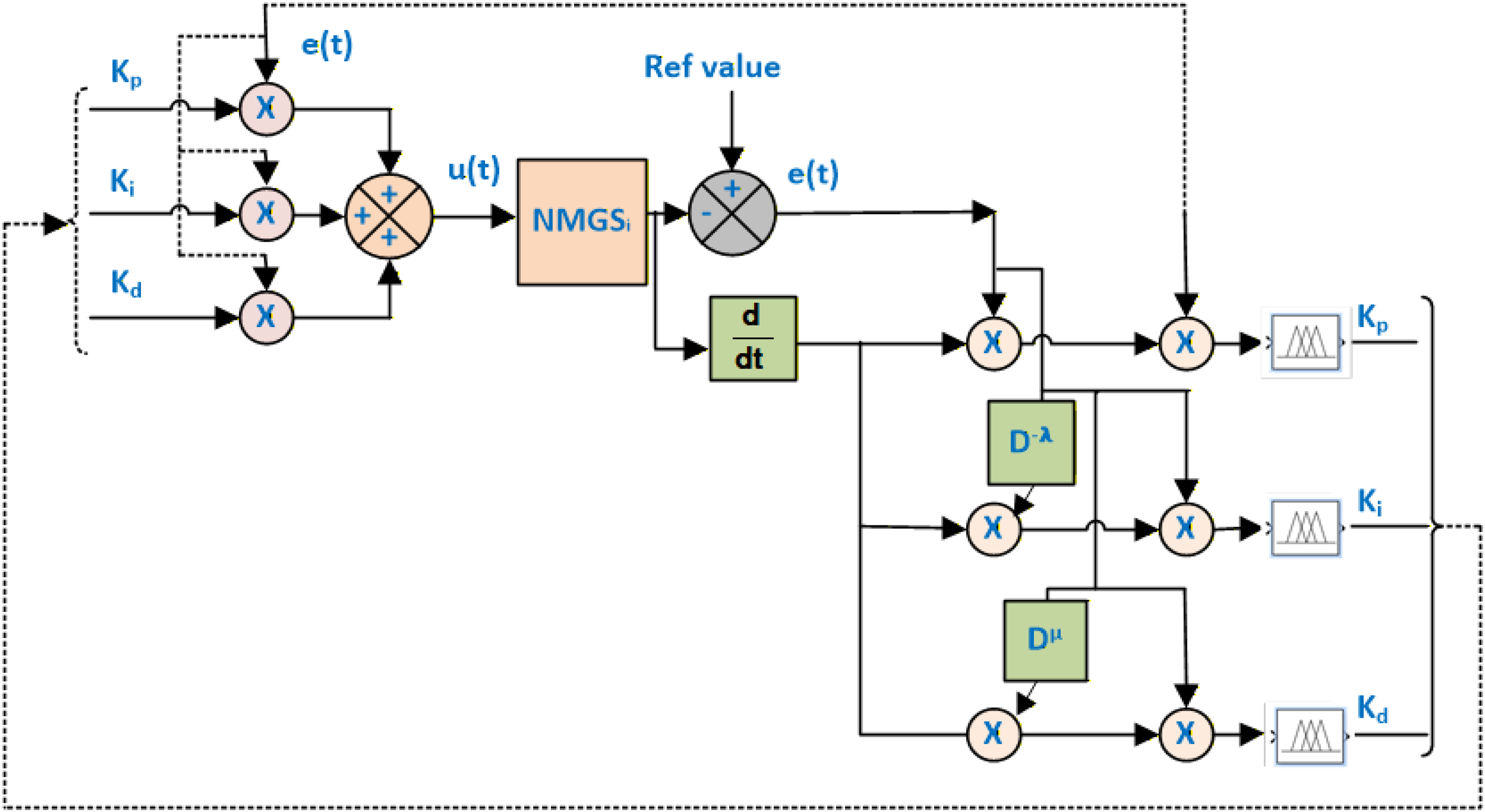
From Figure 2, equation (11) can be expressed as,

Closed-loop feedback control system – tuning FOPID parameters using FL-based fuzzy logic techniques.
The current output of the plant is represented by yplant, which is written as yplant = T(u(t)), whereas the reference value of the plant output is indicated by yref. In this case, u(t) denotes the controller's output.

Step 2: RNN dynamics
Next, differentiate the energy function (equation (14)) in relation to the variables that are not known. Since the differential operator with fractional order is not differentiable, the parameters Kp, Ki and Kd are handled as variables in this context, while the fractional orders are kept constant. The resulting differential equations, as stated below, capture the dynamics of each neuron with respect to the variables Kp, Ki and Kd.





Step 3: function activation
The activation function receives input from the neuron's dynamics. There is a use of a linear activation function, which is commonly defined as follows:
Structure of RNN-based FOPID controller.
The elements of u in this form indicate the dynamics of every neuron. As a result, Kp = ɸ(u1), Ki = ɸ(u2), Kd=ɸ(u3), where xp, xi and xd represent the recurrent network's input neurons. The neuron's activation function is represented by ɸ and
Step-4: fractional gain and order coefficients
The coefficients are considered constant as the differential operator with fractional order cannot be calculated. Therefore, the dynamical equations are not obtained for λ and µ. An AI-based fuzzy logic algorithm has been used to tune the parameters of the FOPID controller by solving equations (18)–(20).
Fuzzy recurrent neural network
RNNs operate as a single layer and have feedback connections that allow the system's output to affect its input. The objective function based on Lyapunov ensures convergence to an optimal solution. The authors’ earlier work (Miloudi et al., 2026) offers a thorough explanation of the Hopfield network, such as the traditional HNN. However, it has problems, such as getting stuck in local minima and sometimes finding non-global solutions. This is a result of the complex energy function, which has several parameters that must be optimised. Various authors claim that using a fuzzy-based method with the HNN can improve its performance and cause global minima to be found. Thus, to control IMS frequency, the authors investigate the F-RNN technique. Figure 4 shows the construction of the proposed F-RNN.
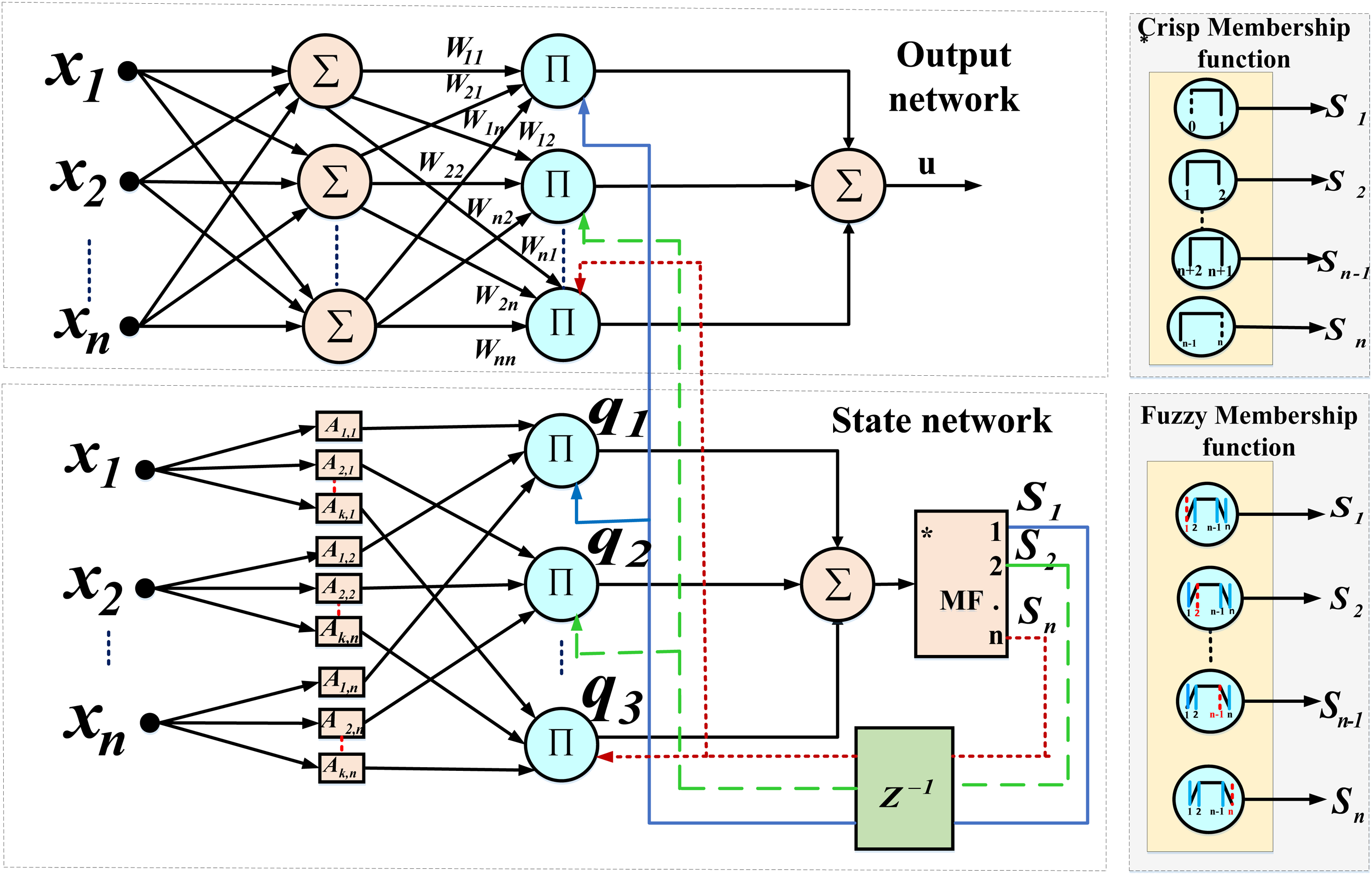
The structure of the fuzzy-recurrent neural network.
Then, fuzzy concepts are incorporated into the HNN's energy function.
The connection weight between the ith and jth neurons is denoted by 
On simplifying, we get,
Equation (24) assumes that all other parameters involved in the calculation are positive, and that the fuzzy membership function,
Distributed consensus control of IMS
Consider an microgrid system in IMS, the ith microgrids state is represented as 

Consensus-based federated learning for RNN
In this research article, a consensus-based FL approach is used to update the RNN's weights, enabling distributed learning across the network's neurons. Without relying on a centralised learning agent, this framework achieves consensus by having each neuron update its local weights by sharing model information with its neighbours. A detailed discussion of the general principles of FL can be found in Veerasamy et al. (2022). Let 


The RNN weights converge toward a shared solution throughout the network via consensus interactions and iterative local updates.
Results and discussion
The MATLAB/Simulink-based simulation outcomes confirm the robustness and efficacy of the proposed FL–F-RNN–FOPID distributed frequency control scheme for the IMS under various operating conditions, as discussed below. Following that, the IMS considered for this study is experimentally confirmed using a HIL framework. In addition, the recommended FL–F-RNN–FOPID controller is constructed on an OPAL-RT real-time digital simulator.
Case I: baseline performance analysis of IMS during normal loading operation
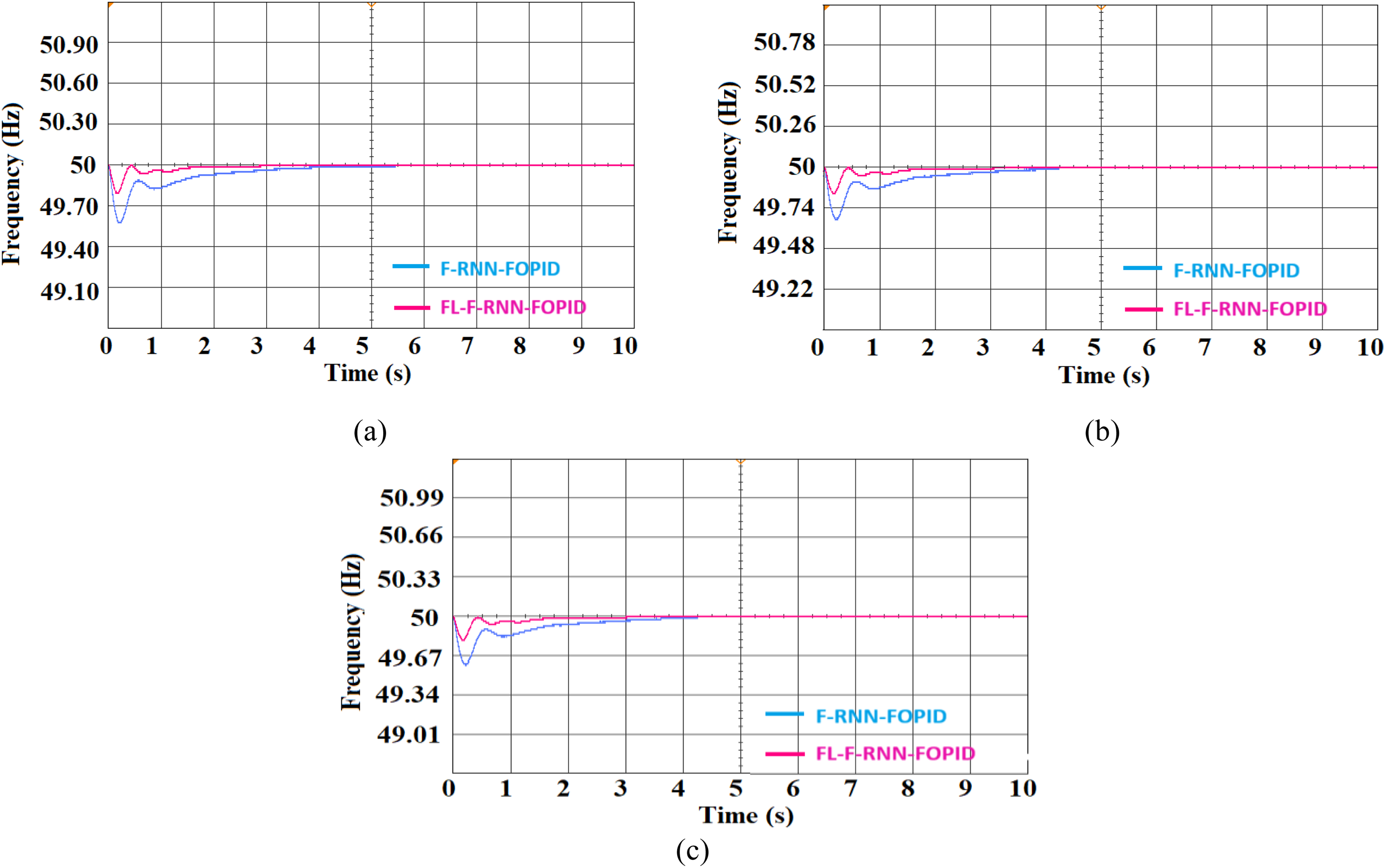
In IMS, normal loading condition is a very significant scenario as it defines how microgrids operate at their rated limits and fulfil the scheduled load demand, ensuring that all the microgrids are functioning in a stable mode. It provides a basic baseline for assessing controller performance such as frequency stability, settling time, overshoot and steady-state error under normal operating conditions. This operating point guarantees a correct generation-demand power compensation, leading to nominal frequency and voltage profiles. It also enables verification of coordinated power swap between IMS without inducing instability or circulating power. As most real systems function close to normal loading for many hours, attaining optimal performance in such a region is paramount to guaranteeing reliability, efficiency and sustainability of the system. Moreover, it serves as a benchmark for assessing advanced control strategies against traditional approaches and builds confidence before investigating system performance under real-time dynamics like load fluctuations, communication lags and cyber-attacks. In this scenario, the IMS initially operates under typical loading conditions, with load demands of 0.19, 0.168 and 0.09 pu of the total plant capacity for microgrid 1, microgrid 2 and microgrid 3, respectively. The frequency responses of the IMS under normal loading circumstances are depicted in Figure 5(a) to (c). The findings show that the FL–F-RNN–FOPID controller achieves settling times of 3, 3.2 and 3 s for MG1, MG2 and MG3, respectively. This is compared with the F-RNN–FOPID controller, which achieves settling times of 4 4.2 and 4 s, respectively, as well as the RNN–FOPID controller and the standard FOPID controller.
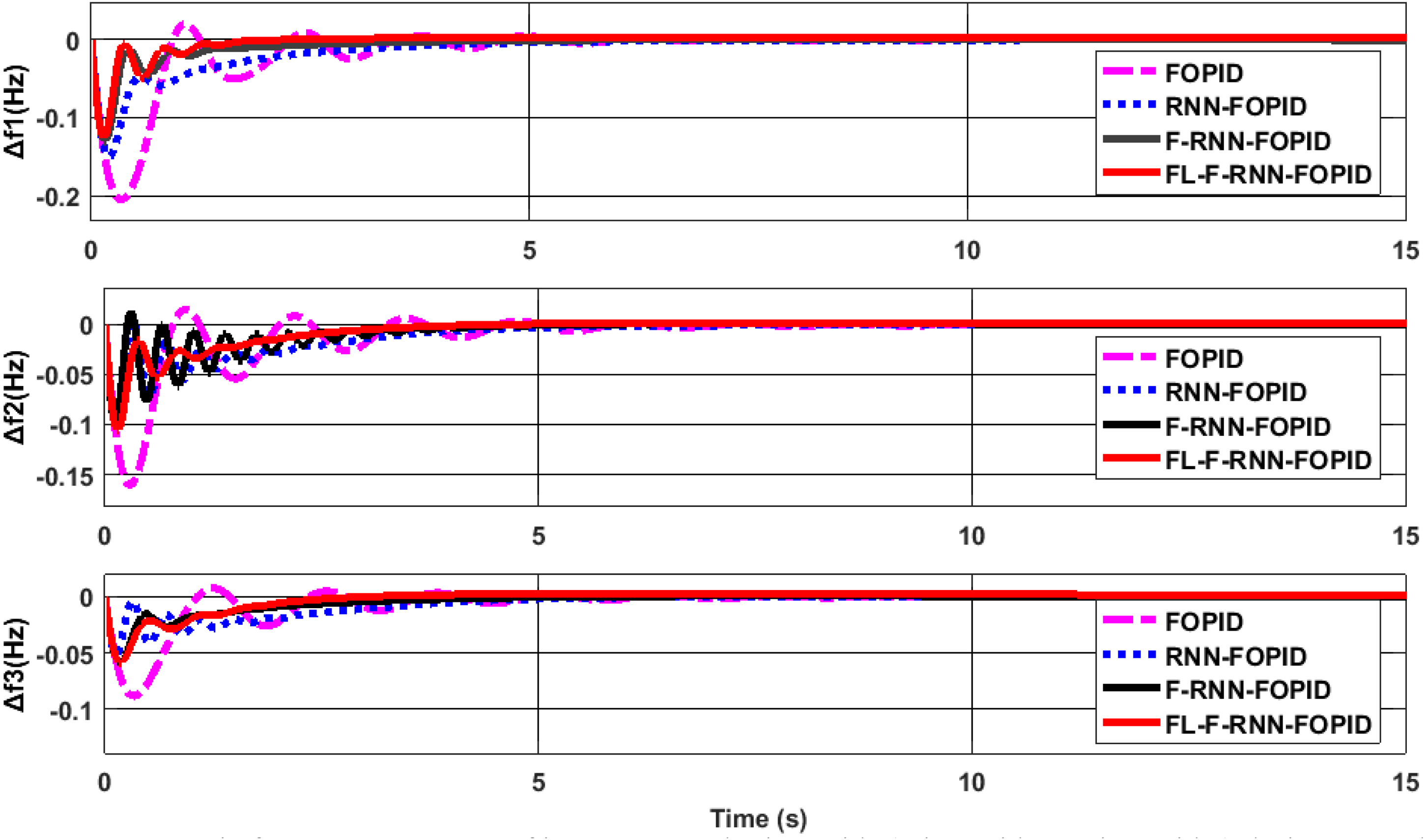
Dynamic frequency response of interconnected microgrids (microgrid 1–microgrid 3) during normal operation.
Real-time validation
By employing real-time digital approaches, researchers can test many scenarios in almost real-time settings, reducing risks before field deployment. OPAL-RT is the most robust, flexible and efficient real-time digital simulation solution for power systems available today. The electromagnetic theory is skilfully simulated, and the transient stability of large power systems is addressed. Power system scientists and engineers can now improve or build grid security, efficiency, performance and protection thanks to this technology. The HIL digital simulator configuration of IMS is shown in Figure 6. Subsequently, the IMS considered in this study is validated via a HIL implementation, where the proposed controller is deployed on an OPAL-RT real-time digital simulator, as illustrated in Figure 7(a) to (c).

Hardware-in-the-loop implementation of DCS for the IMS.
Frequency response of IMS during normal operation in HIL environment.
The consensus error is a performance metric in the IMS that quantifies the deviation of individual microgrid states from a common agreement value to assure effective power sharing, voltage regulation and frequency control. It indicates the effectiveness of information exchange on power, voltage and frequency among interconnected microgrids within a distributed coordinated control framework. The efficacy of the underlying communication and control strategy is shown by the proposed controller's capacity to progressively reduce the consensus error and achieve synchronised system operation. The power reliability and IMS stability minimise the consensus error under both the normal and distributed load operating conditions. Consequently, the consensus error is the most critical performance metric for assessing the adaptability of proposed control methods in IMS. The consensus error response of the interconnected microgrids (microgrid 1, microgrid 2 and microgrid 3) is illustrated in Figure 8(a) to (c). Table 2 shows the performance indices for microgrid 1, 2 and 3. This response highlights that the IMS has obviously improved its ability to run coordinated and harmonious operations under the proposed control strategy. The successful synchronisation of frequency across all IMS demonstrates that consensus has been achieved with minimal mismatch. FL–F-RNN–FOPID controller converges the consensus error faster than all other algorithms under consideration, signifying that the value of individual frequencies remains lower as time slides. The transient oscillation is significantly obviated, and stability can be attained in a lesser time with better damping characteristics. The quick settling of the controller described here demonstrates its highly dynamic ability due to the synergism of fuzzy logic used for uncertainties, a RNN embedded in the control structure to learn system behaviour, and FOPID helps provide more flexibility. Consequently, the IMS's steady-state values are steadily close to their respective desired states with small steady-state error against minor disturbances while being able to share power between other microgrids efficiently, showing the goodness of the proposed controller over traditional and intermediate techniques.
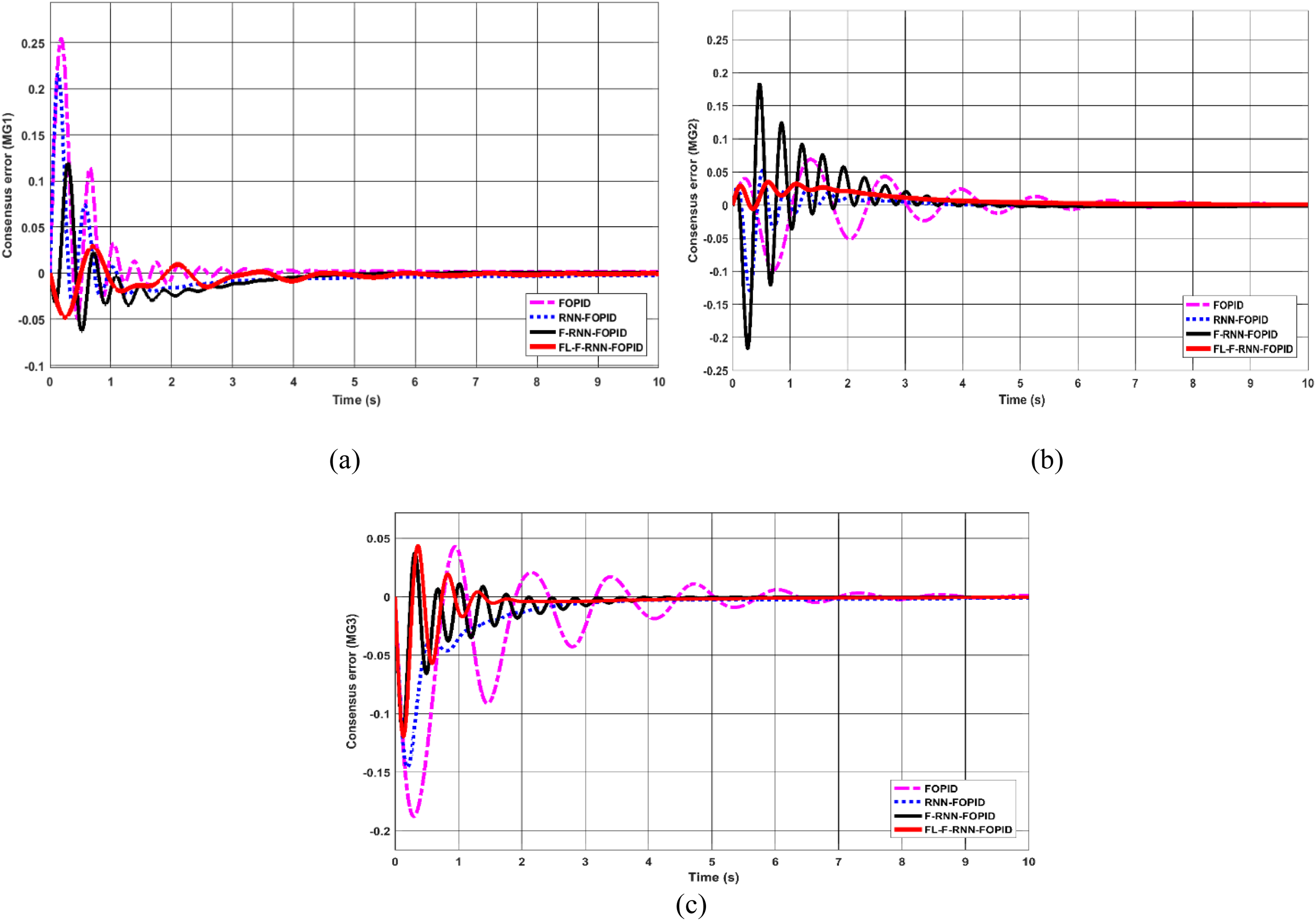
(a), (b) and (c) Dynamic consensus error response of interconnected microgrids (microgrid 1–microgrid 3) during normal operation.
Performance indices values for microgrids 1, 2 and 3.
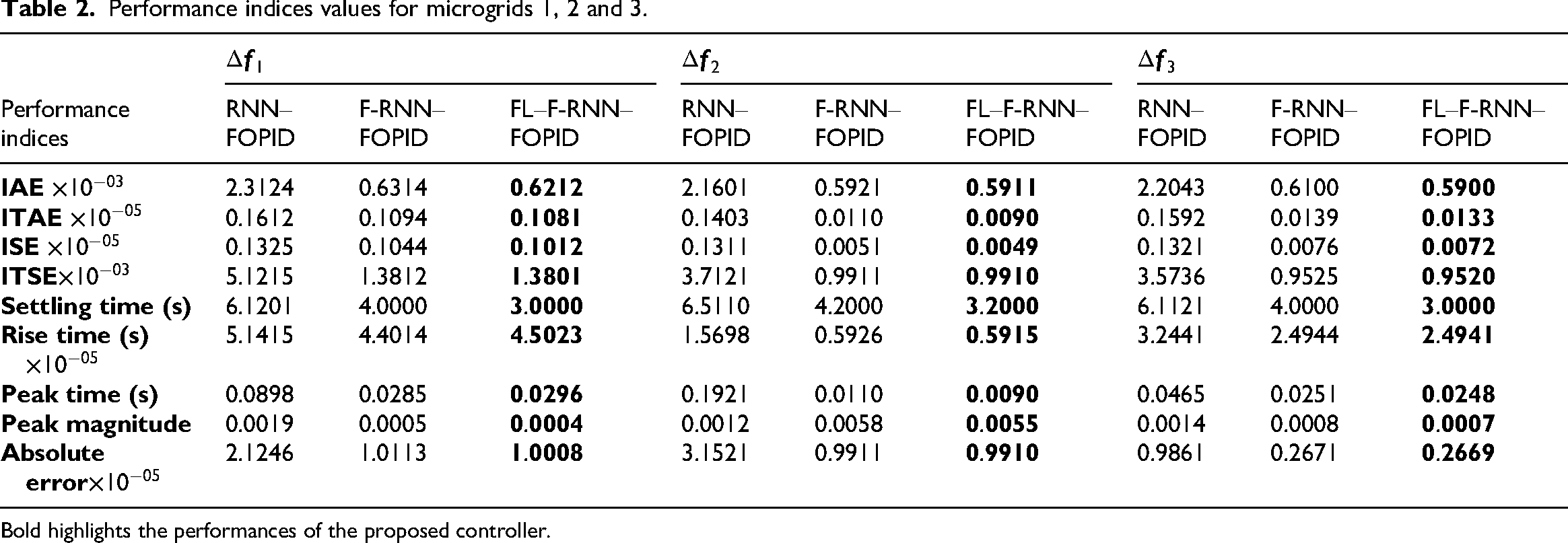
Bold highlights the performances of the proposed controller.
Case-II: performance evaluation of IMS with stochastic load profiles
Such stochastic load profile test cases for an IMS are integral to strongly validating the performance and robustness of a proposed controller in realistic operating environments. Power systems usually experience load demand uncertainty, which is continuous and time-varying owing to consumers’ behaviour, RES integration and stochastic disturbances. Stochastic load profiles are characterised by stochasticity or random variability, reflecting more practical operating conditions, unlike deterministic or fixed loads. By testing the proposed controller under such conditions, its ability to ensure steady frequency regulation with minimal deviations and quick damping of any perturbation, regardless of the load being random, can be confirmed.
It further assesses the adaptability, resilience and robustness of the controller to continual perturbations, which is vital for system reliability, as attested within the relevance conclusion. Stochastic testing plays the role of providing confidence in the test to evaluate reliably in an effective coordinated power sharing to all connected microgrids without causing instability or high oscillation. Therefore, a controller capable of an excellent dynamic response and lower performance indices under stochastic load variations with almost zero steady-state error indicates that the designed system is ready to be implemented in practical situations. Therefore, including stochastic demand profiles is essential to ensure that the proposed control strategy is effective not only in theory but under real-time and uncertain conditions. Hence, to evaluate the strength of the projected FL–F-RNN–FOPID control method against stochastic load profile disturbances, load changes are applied to MG1 of IMS at 10-s intervals. These variations range from 15% to 85% of the overall plant capacity.
An illustration of the frequency response corresponding to these stochastic load fluctuations is shown in Figure 9. The dynamic responses indicate that the proposed FL–F-RNN–FOPID controller achieves faster settling, with significantly reduced overshoot and minimal transient oscillations, compared to the conventional approach, demonstrating improved damping and stable frequency regulation across all microgrids.
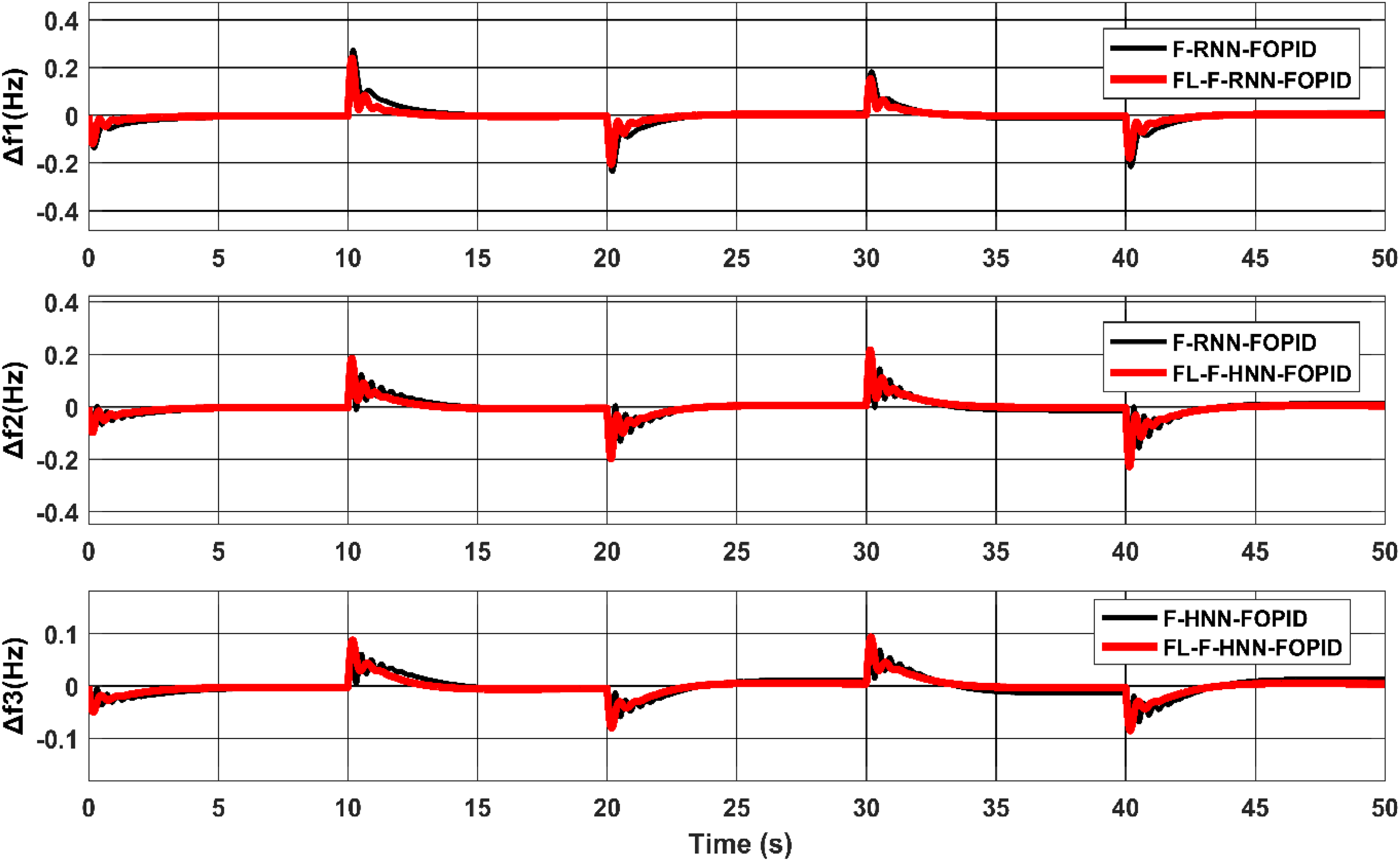
Dynamic frequency response of interconnected microgrids (microgrid 1–microgrid 3) during stochastic load profiles.
Case III: Phasor measurement unit (PMU) failure
Different scenarios for assessing the reliability of the PMU and the performance of LFC will reflect actual disturbances in the PMU-based measurement and communication systems. To evaluate this effect, first, the impact of failed communication links between the two ends of the communication loop will be simulated using intermittent signal dropouts. Second, the impact of delay in communication between the two ends of the feedback loop (from measurement systems to actuators) will be modelled as introducing a time delay into the feedback loop between the two ends of the feedback loop. Finally, the impact of source loss will be modelled by disconnecting any one source from the connection of IMS. All three scenarios mentioned previously will be evaluated to determine how they affect the overall performance of the LFC in controlling frequency deviation for instrumentation within the IMS.
Case III-a: IMS performance assessment in the presence and absence of communication delays
The time gap between the transmission and reception of frequency information among IMS, distributed generators, controllers and energy management systems is referred to as communication delays. These delays are the result of network congestion, data processing time, packet losses and constraints on communication infrastructure, including wireless, fibre and internet-based networks. By degrading frequency and voltage regulation, power-sharing accuracy and communication delays, DCSs can be adversely affected, slowing coordination, increasing transient deviations, and potentially degrading these parameters. If not addressed appropriately, the IMS may experience oscillations or instability due to excessive delays. Consequently, it is imperative to analyse and mitigate the effects of communication latencies to guarantee the synchronised, reliable and robust operation of networked microgrids in both normal and disrupted operating conditions. To determine the dependability of the proposed controller, several communication delays are considered. Even with communication delays of 25–75 ms, the proposed controller successfully settles to steady state and sustains stable operation, as shown in Figure 10. The results suggest that the deviation in frequency has a shorter settling time in the presence of communication delay and in its absence, compared to other techniques. Also, the FL–F-RNN–FOPID controller proposed achieves faster damping and lower overshoot than the F-RNN–FOPID scheme in both delayed and delay-free conditions. This validates the proposed controller's robustness and efficacy in ensuring the networked microgrid's frequency regulation remains stable and coordinated.
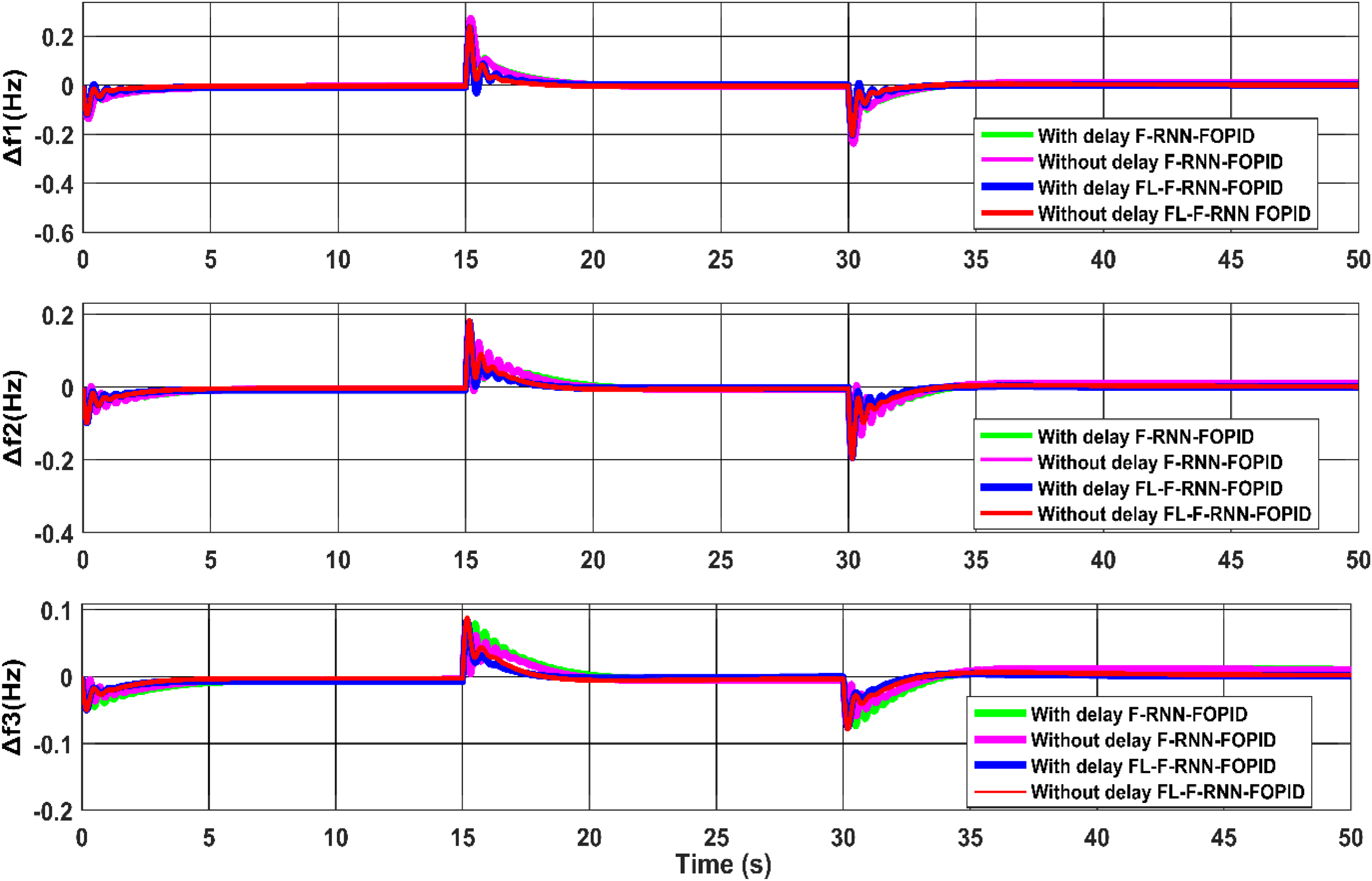
Dynamic frequency response of interconnected microgrids (microgrid 1–microgrid 3) in the presence and absence of communication delay.
Case III-b: IMS performance assessment in the presence and absence of source loss
It is an essential component of plug-and-play functionality for microgrids. The efficiency of the controller is critical because without it, microgrids couldn’t operate plug-and-play, endangering the effectiveness, dependability and flexibility of the system. To observe frequency variations in the event of source loss, microgrid 1, microgrid 2 and microgrid 3 were subjected to load variations of 0.17, 0.14 and 0.06 p.u. at 0 s, −0.18, −0.13 and −0.07 p.u. at 8 s and 0.11, 0.15 and 0.04 p.u. at 14 s of plant capacity. The proposed F-HNN–FOPID controller was tested by disconnecting and reconnecting microgrid 3 from IMS at t = 8 s and t = 24 s, respectively, to show its effectiveness. This disconnection causes the communication link to microgrid 3 to become unavailable.
Figure 11 shows the graphical representation of IMD during microgrid 3's source loss. The recommended controllers successfully manage power distribution among the remaining microgrids, demonstrating exceptional plug-and-play functionality. Moreover, microgrid 3 immediately supports power sharing after it is reconnected to the IMS. The frequency responses of microgrid 1, microgrid 2 and microgrid 3 for the suggested controller in the plug-and-play scenario are shown in Figure 12. As long as the communication link remains available, microgrid 1 and microgrid 2 keep the system frequency constant, enabling the controller to come to a decision. As the physical tie-line connection to neighbours breaks in the instance of microgrid 3, the response oscillates, and the network becomes isolated from the IMS without a leader microgrid to follow the reference signal. As such, it takes some time for the frequency to stabilise.
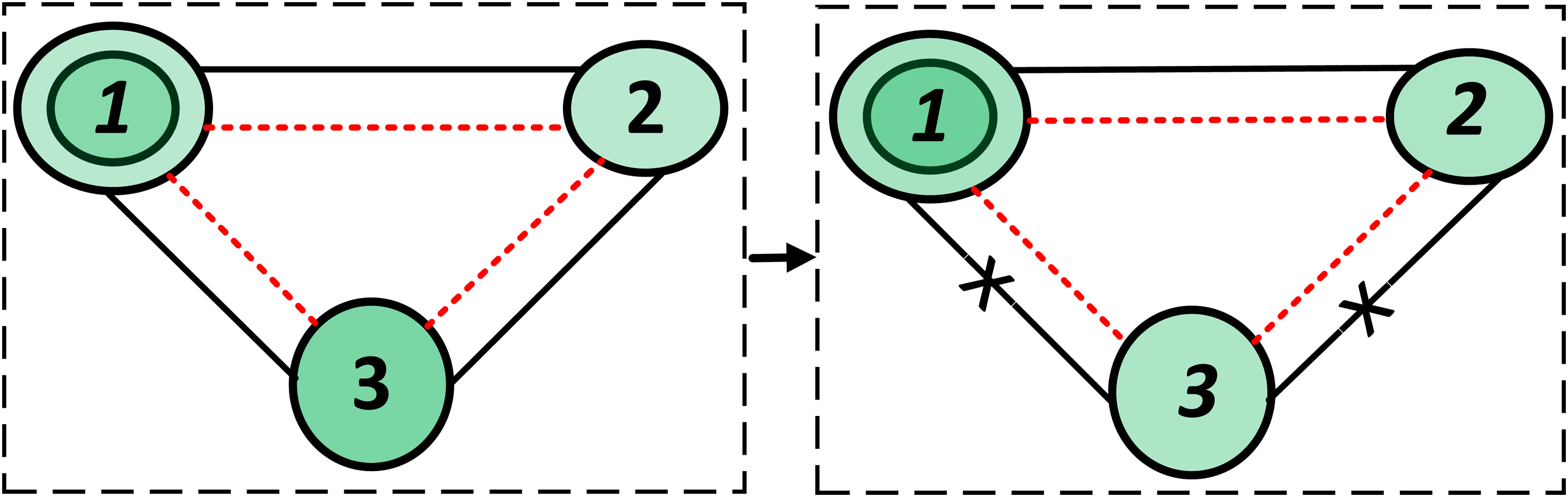
Graphical representations of IMS during source loss.
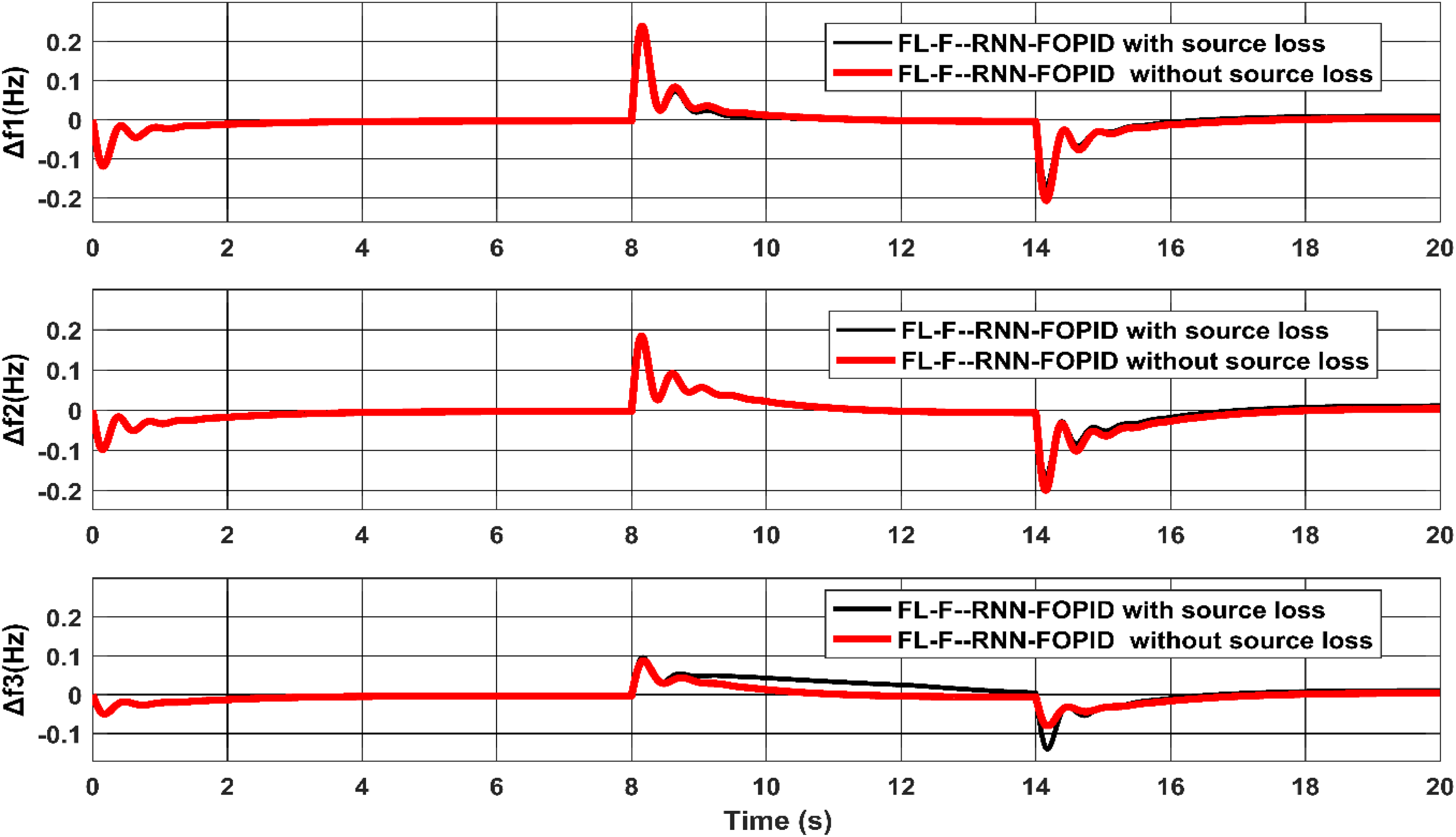
The frequency responses of microgrid 1, microgrid 2 and microgrid 3 during source loss.
Case III-c: IMS performance assessment in the presence and absence of communication link failure
In microgrid, a communication link failure is the loss or interruption of component-to-component communication, which can affect fault detection, energy management, control, islanding decisions and emergency response. Implementing redundant and dependable communication networks, cutting-edge protocols and technology to quickly identify and fix connection problems are all necessary to mitigate this failure. Maintaining a microgrid's resilience and dependability under changing settings requires strong communication. If a communication link or tie-line within the system fails, the IMS has been designed to operate in islanded mode. As a result, it becomes essential to implement a strong controller to guarantee the microgrid's safe and dependable operation in the IMS. When there is a loss of communication between microgrids, it can be difficult for a controller to identify problems like overloading or islanding, which can lead to major problems like overloading, islanding and instability in the microgrids.
A case study was carried out to evaluate the controller's resilience to communication link failures. Within the IMS, the scenario called for disconnecting the links at 9 s between microgrid 3 and microgrid 1 and microgrid 3 and microgrid 2, as well as at 13 s between microgrid 2 and microgrid 3 and microgrid 2 and microgrid 1. Figure 13 shows the graphical representation of the IMS system during the loss of communication links. Figure 14 shows the frequency responses of microgrid 1, microgrid 2 and microgrid 3 during IMS communication link loss. The findings show that the controller is adaptive and adjusts the frequency to maintain system stability even when communication links are unavailable for certain microgrids. This study highlights the importance of an effective controller in minimising the effects of communication link failures inside IMS and maintaining the microgrid's reliable and secure operation.
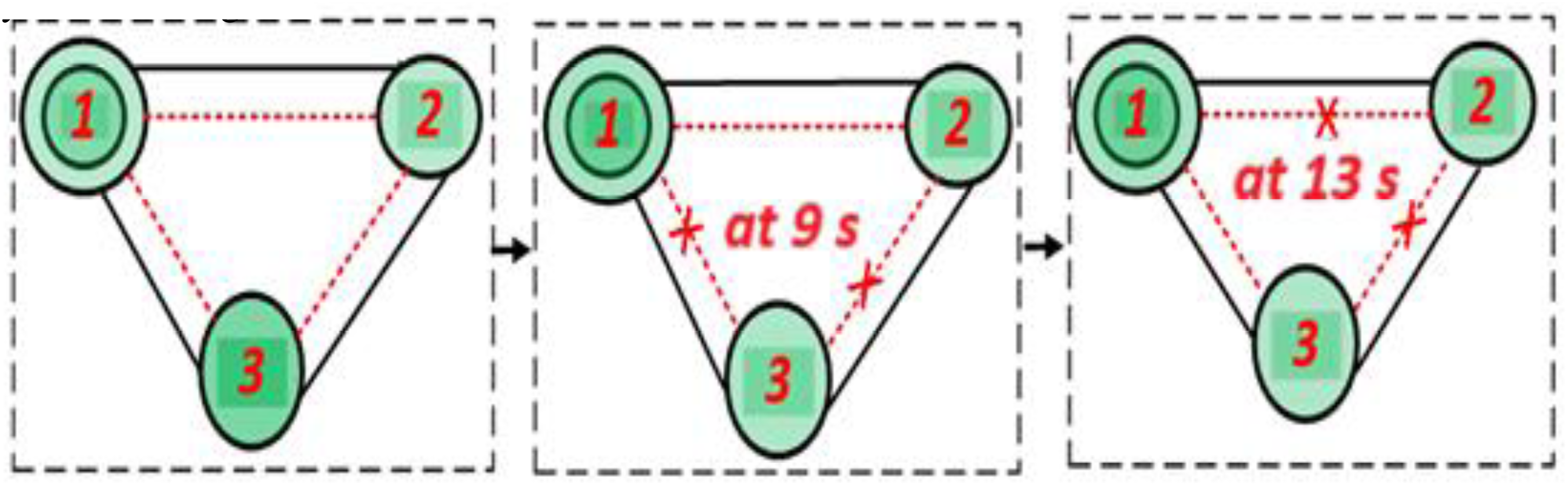
Graphical representation of IMS during communication link failure.
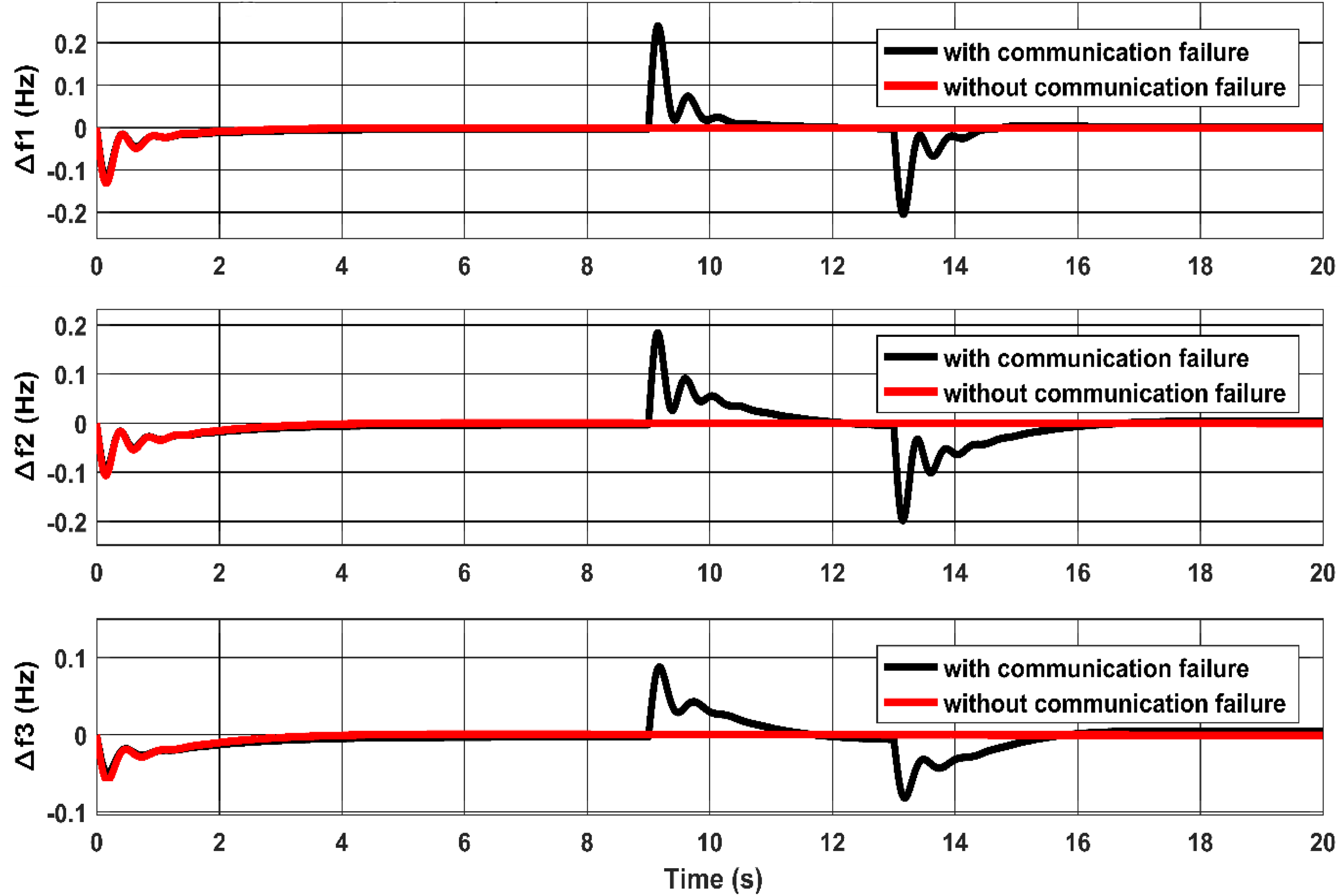
Frequency responses of microgrid 1, microgrid 2 and microgrid 3 during communication link failure.
Conclusion
This study examines previous research on frequency control, along with the various control methods proposed for microgrid frequency control. Various control strategies have been proposed for frequency regulation of microgrids (e.g. centralised, decentralised and intelligent). However, there are still unresolved major issues with respect to the previously published work. These problems are primarily due to most of these studies using centralised or partially centralised schemes, which are prone to single points of failure, limited scalability and communication bottlenecks as the number of DERs increases. Furthermore, most intelligent controllers lack a formal Lyapunov stability proof when fractional-order dynamics, stochastic load variations and communication delays coexist. This research work proposes an FL–F-RNN–FOPID architecture that enables decentralised intelligence transfer without centralising data, thereby achieving scalability, privacy and robustness. The results show that, across several case studies ranging from general operational situations to perturbations induced by random load variations and PMU failure scenarios such as communication delay, communication link failure, and source loss, robustness, adaptability and reliability are superiorly verified in IMS via the proposed controller compared to other investigated controllers. The controller operates at a near-constant level, with precision frequency control and rapid settling time under typical conditions. At the same time, real-time HIL testing on an OPAL-RT platform demonstrated the proposed controller's reliable performance under communication delays of 25–75 ms. The proposed strategy is demonstrated to provide decreased consensus error, faster settling time, improved damping characteristics and robust frequency consolidation between all connected microgrids. Thus, this work demonstrates a viable, scalable and resilient control solution for real-world independent microgrid applications while overcoming the challenges faced by existing methods. Also, the quantitative performance analysis clearly demonstrates the superiority of the proposed FL–F-RNN–FOPID controller over RNN–FOPID and F-RNN–FOPID across all microgrids. In terms of error minimisation, the FL–F-RNN–FOPID achieves the lowest integral absolute error (IAE) values (e.g. 0.6212 × 10−3 for microgrid 1, 0.5911 × 10−3 for microgrid 2 and 0.5900 × 10−3 for microgrid 3), indicating a significant reduction in cumulative frequency deviation compared to RNN–FOPID, which exhibits much higher values (above 2.16 × 10−3). Similarly, integral time absolute error (ITAE) and integral squared error (ISE) metrics show substantial improvement, with reductions of more than 90% in microgrid 2 and microgrid 3 when compared to conventional approaches, highlighting enhanced transient performance and faster error decay. The integral time-weighted squared error (ITSE) values are also drastically reduced (e.g. from 5.1215 to 1.3801 × 10−3 in microgrid 1), confirming superior damping characteristics. From a dynamic response perspective, the proposed controller achieves the fastest settling times of 3, 3.2 and 3 s for microgrid 1, microgrid 2 and microgrid 3, respectively, compared to over 6 s in RNN–FOPID, representing nearly a 50% improvement. Additionally, peak magnitude is significantly minimised (up to ∼75% reduction), indicating reduced overshoot and improved stability. The absolute error is also minimised across all microgrids, confirming precise steady-state regulation. Overall, these quantitative findings validate that the FL–F-RNN–FOPID controller ensures faster convergence, lower oscillations and superior robustness, making it highly effective for frequency regulation in IMSs. The future work will involve scaling the proposed framework to very large systems with plug-and-play DERs and a communication architecture resilient to cyberattacks, as well as the further development of adaptive event-triggered FL to enhance scalability, security and real-world applicability through experimental field deployment.
Footnotes
Abbreviations
Author contributions
Jeevitha Kandasamy: writing – original draft, methodology, software, validation, conceptualisation. Sheila Mahapatra: review & editing, supervision. Sachin Shrestha: project administration, formal analysis.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Availability of data and materials
All data generated or analysed during this study are included in this published article.