
Abstract
The adaptability of the power system needs to be improved due to the significant growth in the share of variable renewable electricity generation. Enhancing the flexibility of low-carbon sources, including nuclear power plants (NPPs), is essential to achieving this goal while reducing CO2 emissions. Reactivity, a measure of a nuclear reactor's critical state, is a commonly used metric in the nuclear industry. Reactivity can be controlled through a reactor control (RC), which poses a significant challenge in NPPs. This study focuses on designing and implementing an optimized fractional-order proportional-integral-derivative controller (FOPIDC) to support the reactivity of NPPs through RC. The FOPIDC controls the movement of the rod to match the reactor system's reactivity for power regulation during load-following operations. The gains of the FOPIDC are optimized using the arithmetic optimization algorithm (AOA) and particle swarm optimization (PSO) to improve its effectiveness and efficiency. A comparison between AOA and PSO techniques is presented to demonstrate the usefulness and superiority of AOA. Simulation outcomes reveal that AOA-FOPIDC is performing better than PSO-FOPIDC, which is 25% faster in settling time in dynamic conditions with an overshoot reduced by 38%. In addition, the proposed method exhibited better stability and the ability to cope with reactivity perturbations owing to Xenon and Iodine more rapidly. All of these findings indicate that AOA could be a strong potential tuning method for nuclear reactor control systems under flexible grid operations. The MATLAB/SIMULINK software is used for all studied scenarios.
Keywords
Introduction
Motivation and background
The use of nuclear energy (NE) began to emerge at the start of World War II, particularly after the bombings of Hiroshima and Nagasaki. The NE field developed in two directions: one for peaceful purposes and the other for military purposes. These purposes include electricity generation, conversion of U238 to Pu239 for nuclear weapons, medical procedures, and research (Awad et al., 2024; Joga et al., 2024). This is evident in the significant increase in the number of nuclear reactors (NRs) established, with the number of NRs rising from 11 to 450 reactors between 1960 and 2018 (Clulow and Reiner, 2022; Abhishek Raj et al., 2025). NE is a reliable energy source with a large production capacity that produces clean energy. Unlike other energy sources like wind and wave energy, which are dependent on natural conditions, NE can be produced anywhere as long as the basic components are available, leading to a growing interest in using it for electricity generation (Morganti, 2020; Sinha et al., 2025).
Changes in the operating conditions of a NR during its operation, such as control rod (CR) movement, fuel burn-up, Xenon isotope generation, and temperature progression, necessitate an autonomous NR power control (PC) scheme to regulate reactivity variations caused by these changes in the NR's working environments (Liu and Ye, 2016; Mohamed Nasr et al., 2024). This NR-PC must be designed with high precision to improve nuclear power plant (NPP) performance and mitigate risks from operating condition changes. Most studies in the literature on NRs emphasize a stable flux with minimal settling time (ST), rise time (RT), and overshoot values (OVs). High overshoot ranges negatively impact NR performance by altering the position of CRs, potentially reducing NR reactivity, and leading to harmful reactivity imperfections and xenon toxic conditions exceeding desired power levels. Conversely, a long settling time can increase boric acid levels, resulting in an unwanted positive moderator temperature coefficient (Lamine et al., 2024; Zeng et al., 2021).
Literature review
Classical PID controllers (PIDCs) have been widely used in the control of the NR process (Arunadevi et al., 2024; Assessment and Defect, 2024; Maamar et al., 2025; Mousakazemi et al., 2018b; Wang et al., 2015). In a study by Mousakazemi and Ayoobian (2019), an adaptive gain programmed PIDC for the NR's pressurized water reactor (PWR) type was implemented. The Ziegler-Nichols method was applied to develop fast and efficient regulators for the load-following process of NPPs (Zarei, 2020). The implementation of PIDCs in the NR control process increases its nonlinearity and complexity, making it challenging to tune the PIDC gains. This challenge has led to the exploration of different optimization methods (OMs) for tuning PIDC gains. Various OMs have been proposed, ranging from benchmark methods like genetic algorithms (GA) (Mousakazemi, 2019; Muzzammil, 2013) and particle swarm optimization (PSO) (Dong, 2014; Mousakazemi et al., 2018a) to numerous other optimization techniques. Examples of these OMs include elephant herding (Duan et al., 2022), whale optimization (Mohamed Metwally Mahmoud et al., 2022), and wild horse optimizer (Metwally Mahmoud, 2022).
Despite the PIDC's ability to stabilize the NR power against transients in a regular NR process, it tends to have a long response time (RT) and large OVs depending on the flux rate, making it challenging to regulate NPPs using traditional PIDCs.
To address the control challenges associated with implementing PIDCs for NR control, various approaches have been proposed. One approach is to use adaptive control techniques such as adaptive T-S fuzzy (Kulkowski et al., 2017), self-adaptive (Yin et al., 2023), and variable structure (Elsisi and Abdelfattah, 2020) control. Another approach involves updating the gains of the PIDC using fuzzy logic tuning of the PIDC parameters for PC in an NPP (Yin et al., 2023).
Innovative control designs have also been proposed to address specific challenges in control systems. For example, a novel design of a Smith predictor with an interior-loop PD controller and an outer-loop PI controller has been developed for challenging unstable/integrating plants with dead time and positive zero (Raja, 2021). Additionally, a tri-parametric fractional controller (TFC) has been proposed to support dual-area thermal power systems facing network-related challenges such as transference latency (TL) and Supervisory Control and Acquisition (SCA) systems, enhancing system efficiency (Aryan et al., 2025). Furthermore, a modified inferred internal model control-proportional derivative decoupled binal-loop control system has been suggested for plants with prevalent unstable and integrating dynamics and dead time (Aryan et al., 2024).
A simple and robust automatic suction pressure control system has been designed for a newly developed portable meconium aspirator system (PMAS). The system incorporates a proportional-integral-derivative controller in series with a fractional-order filter (PIDFF) designed using a fractional-augmented internal model control (FAIMC) strategy (Dudhe et al., 2024). Additionally, a fuzzy inferencing mechanism-based GA is presented to provide efficient NR-PC (Liao and Chen, 2013). While these adaptive control techniques and updated gains of the PIDC can efficiently control NRs and overcome issues of conventional PIDCs, they may have difficult and costly installation requirements.
A novel cascade combination of fractional-order proportional-integral-derivative controller (FOPIDC) and PID with a filter, known as CFOID-FOPIDN controller, is utilized as a secondary controller for automatic generation control (Peddakapu et al., 2022; Singh and Arya, 2023). A parallel fuzzy integral-proportional-integral-derivative (FI-PID) controller is suggested for a two-area power system in a deregulated environment, with controller gains optimized using a novel quasi-oppositional equilibrium algorithm (QOEA) (Aryan and Lloyds Raja, 2022). An effective cascade fractional-order fuzzy PID-integral double derivative (CFOFPID-IDD) controller is proposed for efficient utilization of tidal turbines, with design variables tuned through the Jaya algorithm. A Fractional-Order Proportional Tilt Integral Derivative plus one (FOPTID + 1) controller is introduced in the design of AGC to maintain frequency stability and regulate frequency quickly during load disruptions (Choudhary et al., 2023).
A novel fractional-order proportional-integral-derivative (FOPID) controller cascaded with 1 + tilted-derivative (1 + TD) controller (FOPID-(1 + TD)) is proposed for load frequency control (LFC) of a multiarea renewable-integrated hybrid power system (RIHPS). The controller parameters are optimized using the flow direction algorithm (FDA) with integral time square error (ITSE) as the fitness function (Ansari and Raja, 2024b). The FDA is also optimized for a hybrid cascaded PIλ-(1 + TD) controller with integral time square error as the objective function for frequency regulation of a seaport hybrid microgrid (SHMG) system comprising various renewable energy sources (Ansari and Raja, 2024a).
The FOPIDC is a modification of the traditional PIDC, adapting both the differentiation and integration order of the PIDC (Puchalski et al., 2020). FOPID controllers have shown better performance than PIDC in many control applications (Mohamed M Mahmoud et al., 2023), especially in noisy and time-varying goal functions (Parnianifard et al., 2020). FOPIDC design has been applied to the power control of a highly nonlinear heavy pressurized water reactor (PWR) (Bhase and Patre, 2014) and in NRs to determine power routes and overcome errors and instabilities (Zare et al., 2020). The gains of FOPIDC are typically obtained through trial and error rather than using optimization methods for optimal operation and performance (Bhase and Patre, 2014; Zare et al., 2020; Lamba et al., 2017).
Contributions
To bridge the gap between using the FOPIDC optimized through trial-and-error methods for NR-PC, an optimization method (OM) is implemented in this study for fine-tuning the FOPIDC gains. The OM used is the arithmetic optimization algorithm (AOA), which was recently introduced by Abualigah et al. (2021). The advantages of using AOA over other OMs were detailed in Abualigah et al. (2021). AOA has been successfully applied to optimize real-world applications in mechanical and chemical engineering, process and synthesis, and power electronics systems (Zahedi yeganeh and Ansarifar, 2018). Additionally, AOA has not been previously utilized in the investigated application in any published research article.
The primary objective of this study is to develop a new, robust, and optimized FOPIDC for regulating NR power during load following, specifically for the Egyptian Testing Research Reactor (ETRR-2).
The contributions of this work are summarized as follows:
- Utilizing the novel OM, AOA, to optimally tune the FOPIDC parameters. - Employing the optimized FOPIDC to enhance the automation power level of the NR control system under both fixed and variable power input levels. - Conducting a comparison between AOA and particle swarm optimization (PSO) to assess the effectiveness of the new OM in optimally tuning the gains of the FOPIDC.
Paper organization
The remainder of the work is laid out as follows: the second section describes the NR model, which includes the NR point kinetic (NRPK), heat transfer (HT), poisons, and CR models. The third section discusses the construction and tuning of the FOPIDC. The concept of AOA and PSO algorithms is presented in the fourth section. The fifth section showcases simulation studies and discussions for the two investigated methodologies. The article concludes in the sixth section with the conclusions and references.
Description of the ETRR-2 model
To analyze the closed-loop control scheme, the entire ETRR-2 structure of the NR and the dynamic models can be combined to a complete higher-order nonlinear model that includes the models of NRPK, HT, poisons, and CR, as shown in Figure 1. At a steady state, where the NR power equals the reference power (Pref), there will be no error (Ep). Therefore, no control signal will be generated for the controller. When the load power deviates from the reference power, the error signal will change from zero, and this control signal will be sent to the controller. The main objective of the designed controller is to maintain the output power of the NR at the desired value despite any changes in the load power (Bhusari et al., 2023; Wu et al., 2022).
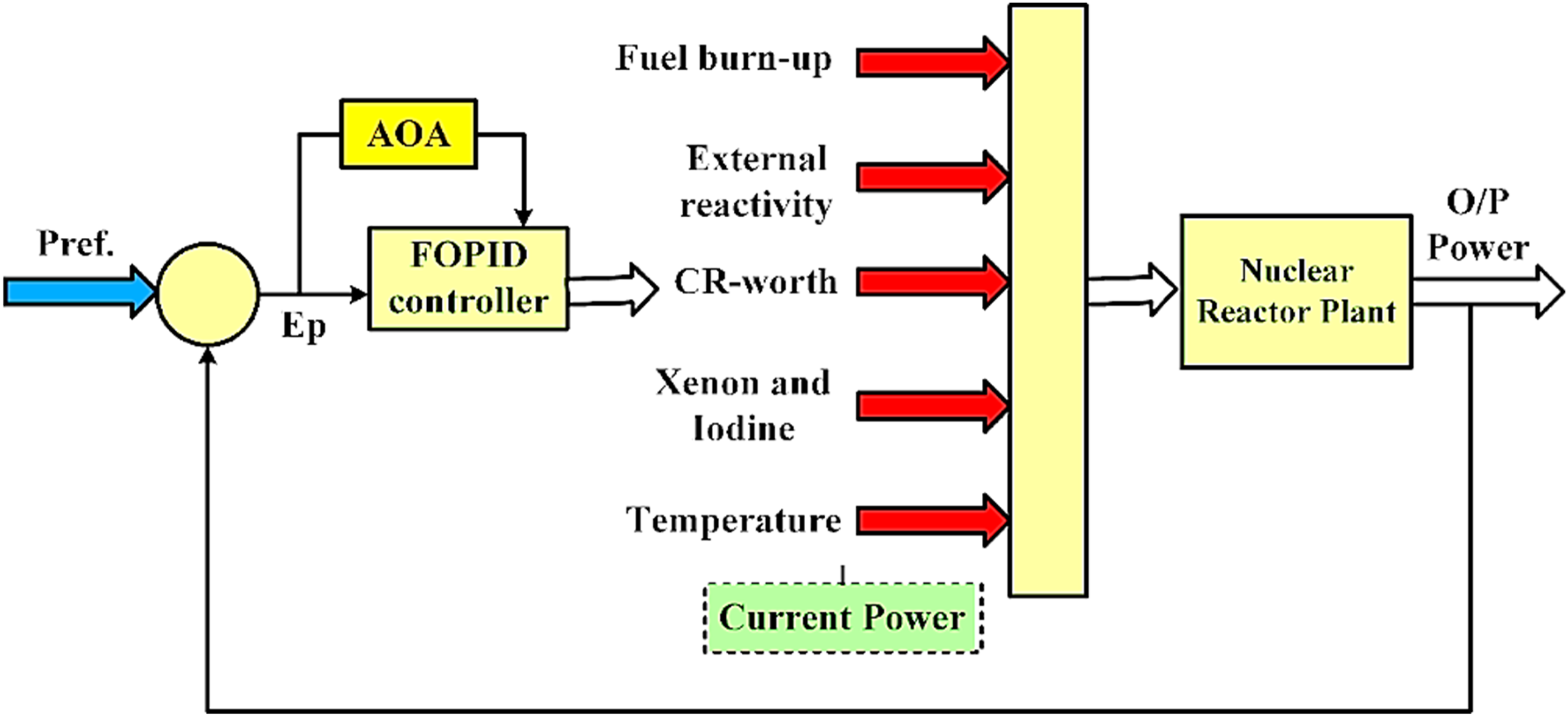
NR control scheme. NR: nuclear reactor.
NR dynamics and PK model
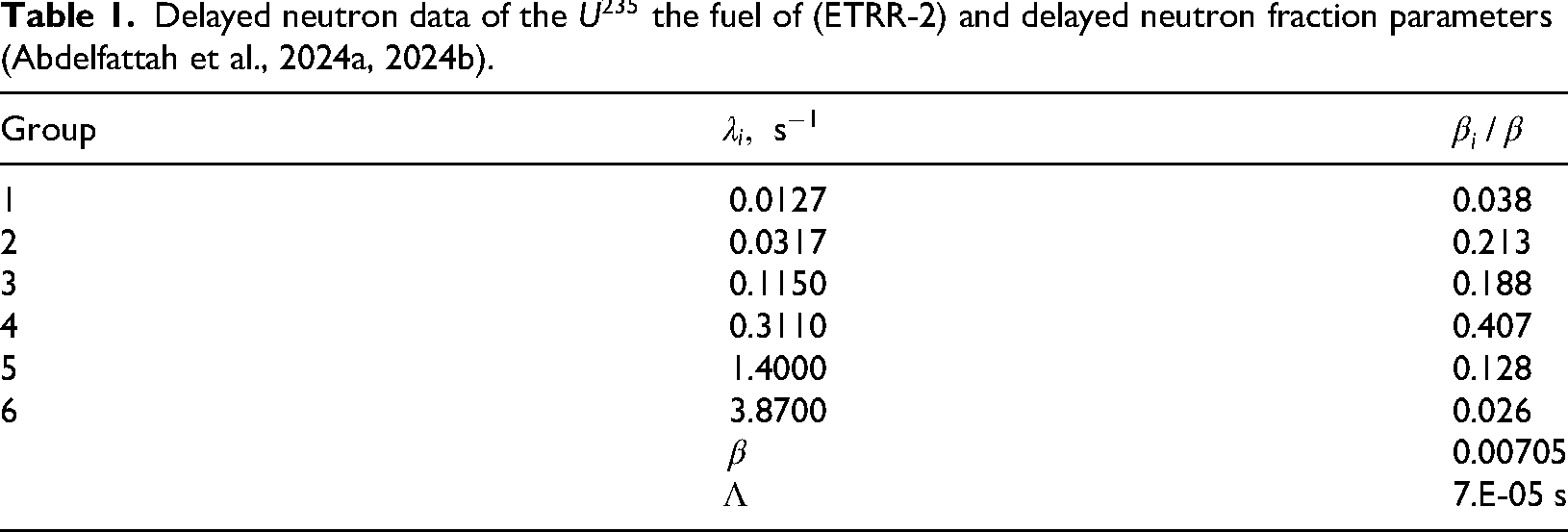
All 24 fission fragments produced by a fission chain reaction have unique half-lives. These fragments are categorized into six groups based on elements with similar half-lives. Table 1 shows the delayed neutron fraction and prompt neutron generation time. The following PK equations are utilized by six organizations to study ETRR-2 dynamics (Peinetti et al., 2006; Wan et al., 2017; Zaidabadi Nejad et al., 2024).


Delayed neutron data of the
HT and temperature feedback model
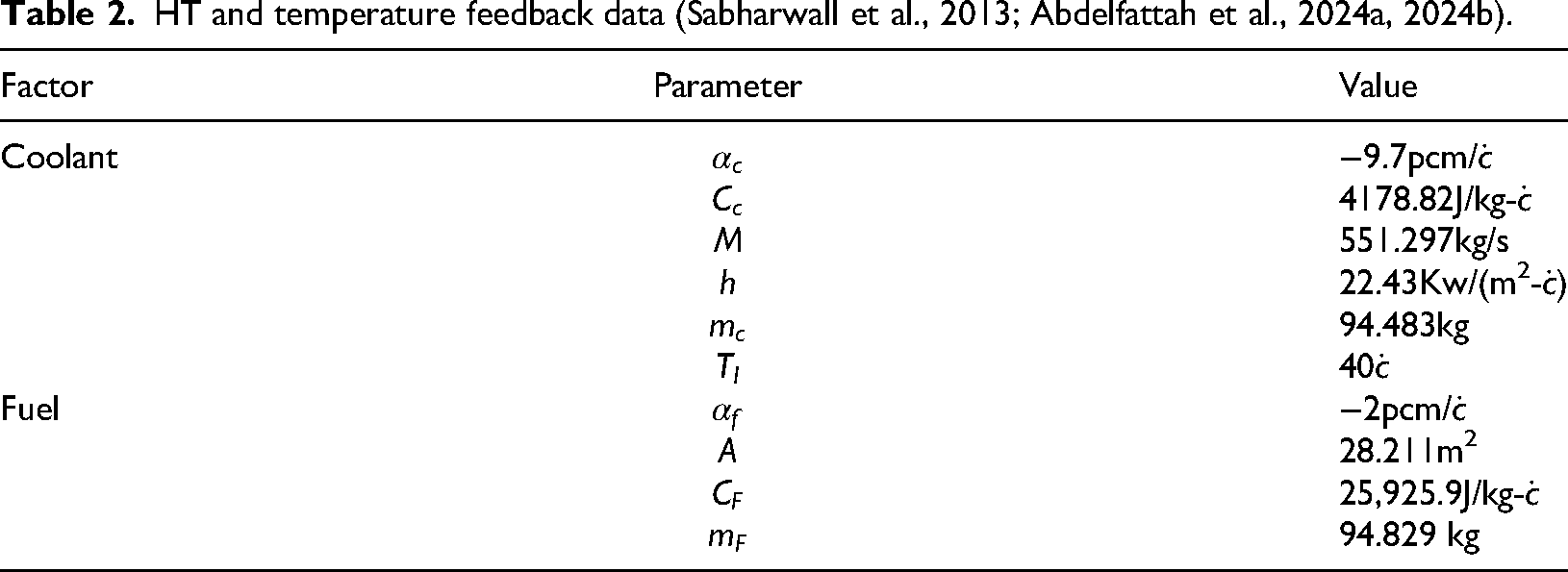
Utilizing the model equations from Rajesh (2019) and Abbasi and Hadad (2012), this section of the NR model analyzes the dynamic heat generation within the NR core. The temperature feedback and HT data for the ETRR-2 are presented in Table 2 (Xu et al., 2022; Sabharwall et al., 2013).


HT and temperature feedback data (Sabharwall et al., 2013; Abdelfattah et al., 2024a, 2024b).
Poisons physical equations modeling
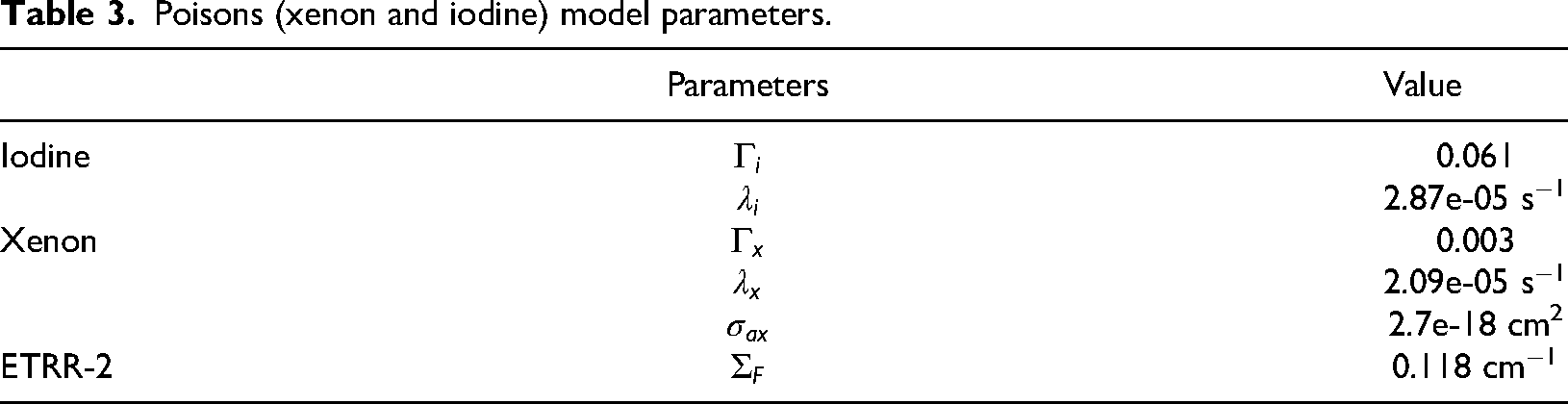
The most dangerous fission product poison is Xe-135 due to its high thermal neutron absorption cross-section of 2.7E + 6 barns. This isotope is produced directly from U-235 fission and indirectly through I-135 decay. Xenon is formed partly from the decay of iodine, so its concentration depends on the level of iodine in the environment. The data for the xenon and iodine model are compiled in Table 3. The concentration rates of iodine and xenon are represented by the following differential equations (Kheradmand Saadi et al., 2010):

Poisons (xenon and iodine) model parameters.
CR model
The complete reactivity related to the PKs equations in the NR core can be described by equations that depend on feedback from fluctuations in the fuel temperature and xenon concentration, as well as external reactivity provided by the controlling rod. These equations are written as (Abdelfattah et al., 2024a, 2024b):

Structure of FOPIDC
FOPIDCs have garnered significant interest in recent years, both from academic and industry perspectives, due to their increased flexibility compared to classical PIDCs. The block diagram of an FOPIDC is depicted in Figure 2. While PIDCs have three controllable parameters (KP, KI, KD), FOPIDCs add two more parameters, bringing the total to five (
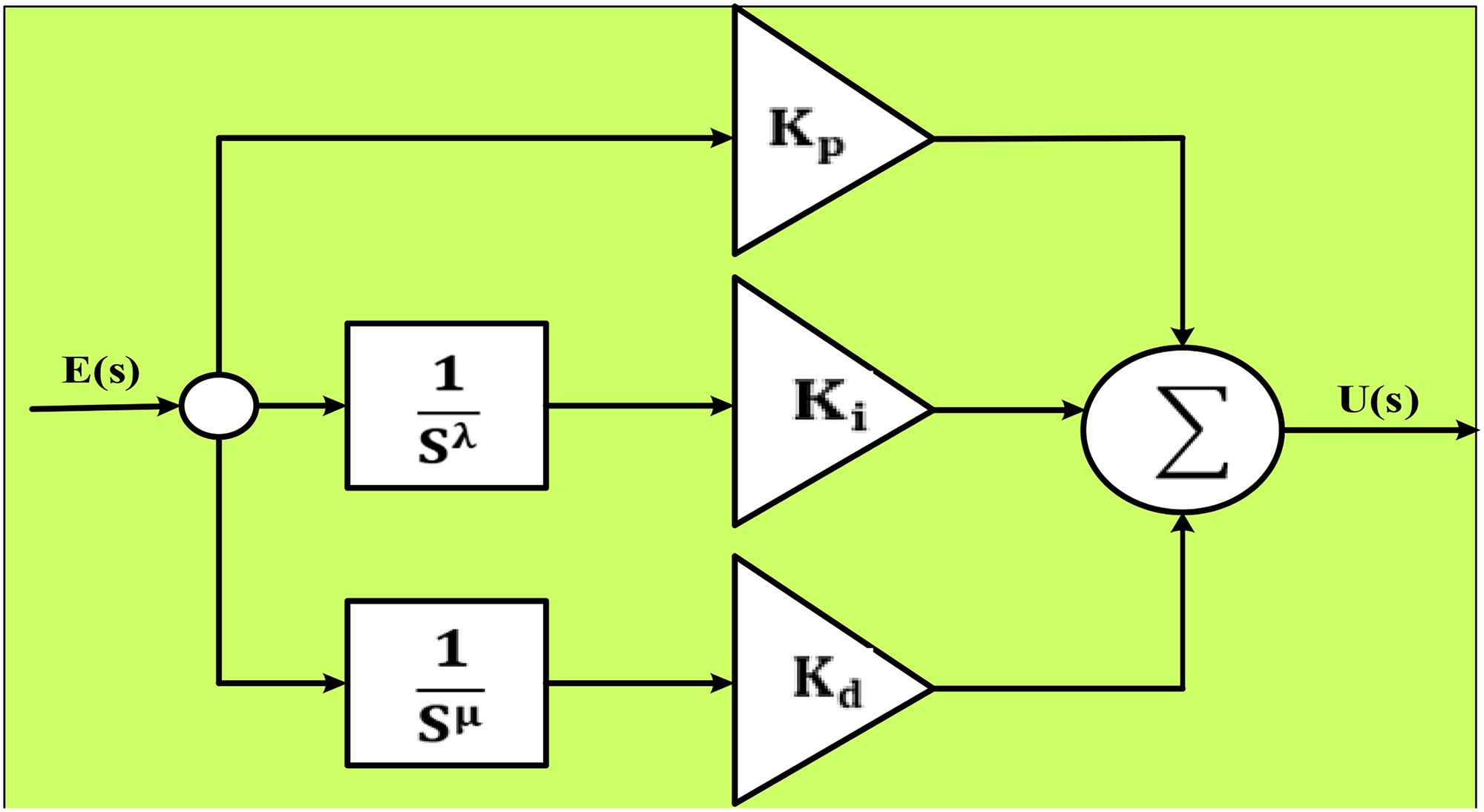
FOPIDC block diagram. FOPIDC: fractional-order proportional-integral-derivative controller.
Investigated and applied OMs
Here, AOA is used for fine-tuning the five gains of the FOPIDC (
Both AOA and PSO aim to determine the optimal parameters of the FOPIDC by minimizing the OFs. The selected OF aims to minimize the TR characteristics due to the error's dependence on time.
An additional performance index called integral square error (ISE) is selected to demonstrate the outcomes of the suggested method and it can be written as follows:
PSO technique
The PSO was considered technologically advanced in 1995. Its creation was inspired by simulations of simpler animal community activities such as fish schooling or bird flocking. The PSO begins with the initialization of particles in the interplanetary hunt, randomly placing inhabitants and relying on swarm particle community actions. It aims to find the most desirable particles of the entire swarm at each successive step (generation) by adjusting each individual's direction toward its ideal position (Fang et al., 2023; Rajesh, 2019). The steps taken by the PSO to optimize the FOPIDC for the NPP are illustrated in Figure 3.
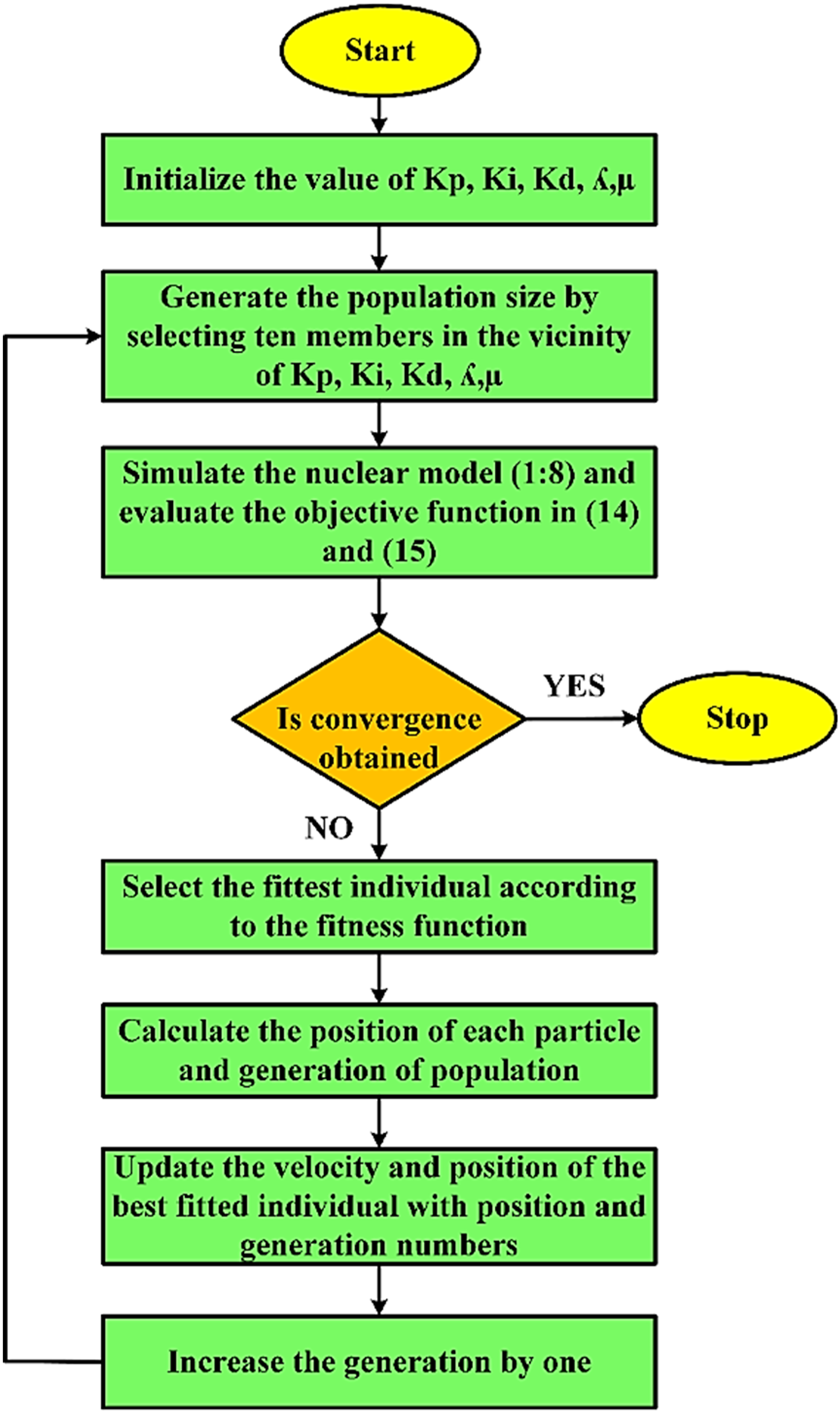
Flow chart of optimizing FOPIDC parameters using PSO. FOPIDC: fractional-order proportional-integral-derivative controller; PSO: particle swarm optimization.
AOA technique
The primary inspiration for the proposed AOA is the utilization of AOs in solving arithmetic problems (Abualigah et al., 2021; Liu et al., 2022). The AOA process consists of two phases: exploration and exploitation. To avoid local optima, the search agents of the algorithm perform exploration over a significant portion of the search space. Exploitation, as illustrated in Figure 4, involves refining the solutions discovered during the exploration phase. The actions of the AOs (multiplication, division, addition, and subtraction) and their impacts are analyzed. The order of the AOs and their precedence from outer to inner is depicted in Figure 5. Before the arithmetic operator mechanism (AOM) begins its operation, it is crucial to select the search phase (exploration or exploitation). The math optimizer accelerated function is a coefficient derived from equation (12) and utilized in the subsequent search phase.

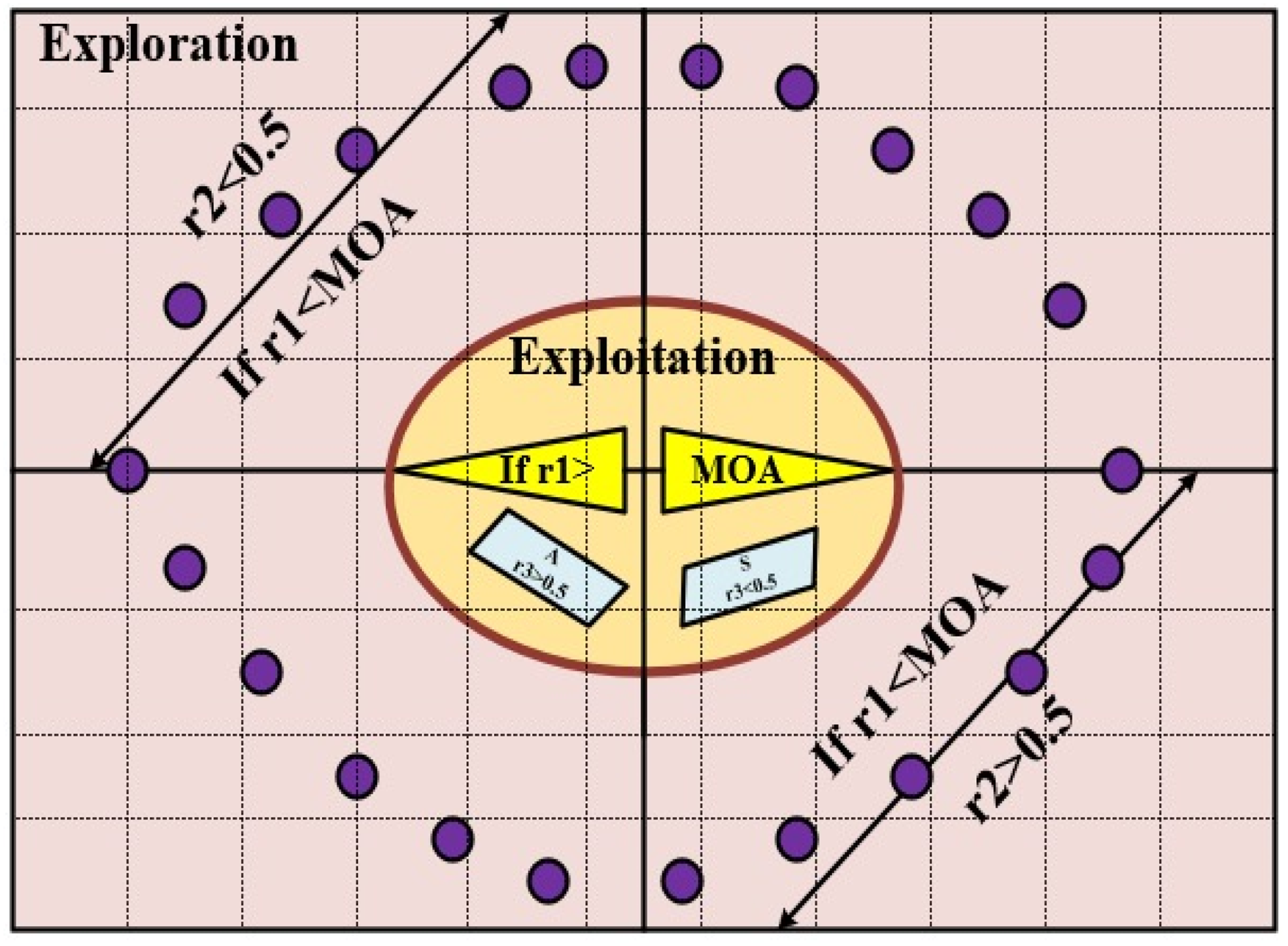
Search phases of AOA. AOA: arithmetic optimization algorithm.
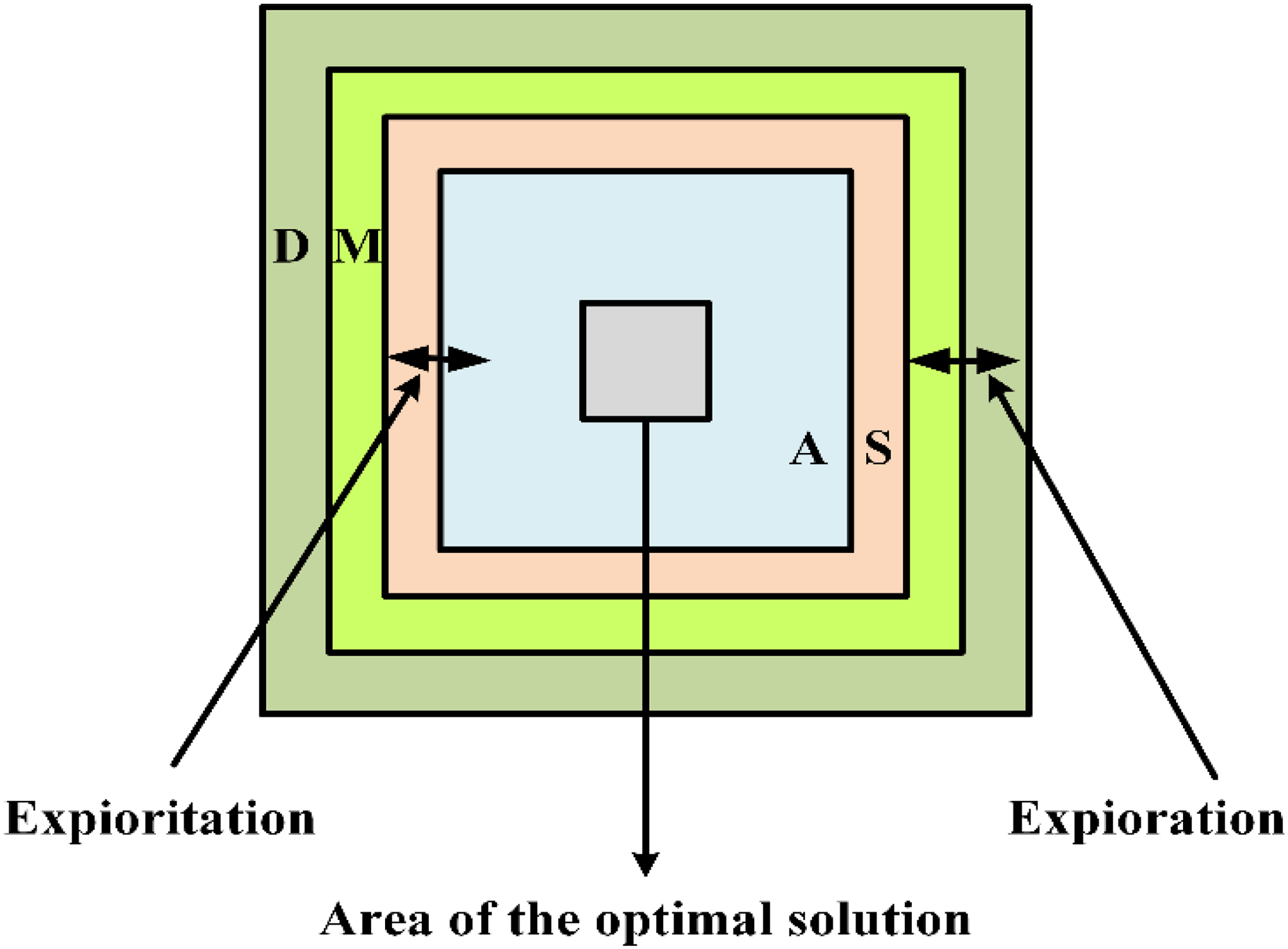
Hierarchy of arithmetic operators.
In the equation,
The following location-modifying formulas are recommended for the exploration phase. The exploration operators of AOA explore the search area randomly in different regions and directions to find a better solution based on two main search strategies: Division (D) search strategy and multiplication search strategy, as modeled in equation (13) (Abualigah et al., 2021).

where α is a crucial factor that indicates the precision of the exploitation across the iterations and is set to 5.
The exploitation operators of AOA (subtraction (S) and addition (A)) delve deep into the search area at various dense locations and aim to find a better solution using two primary search techniques (S and A), as modeled in (15) (Abualigah et al., 2021). The suggested flow chart of AOA for optimizing the FOPIDC for the NR's power is shown in Figure 6.
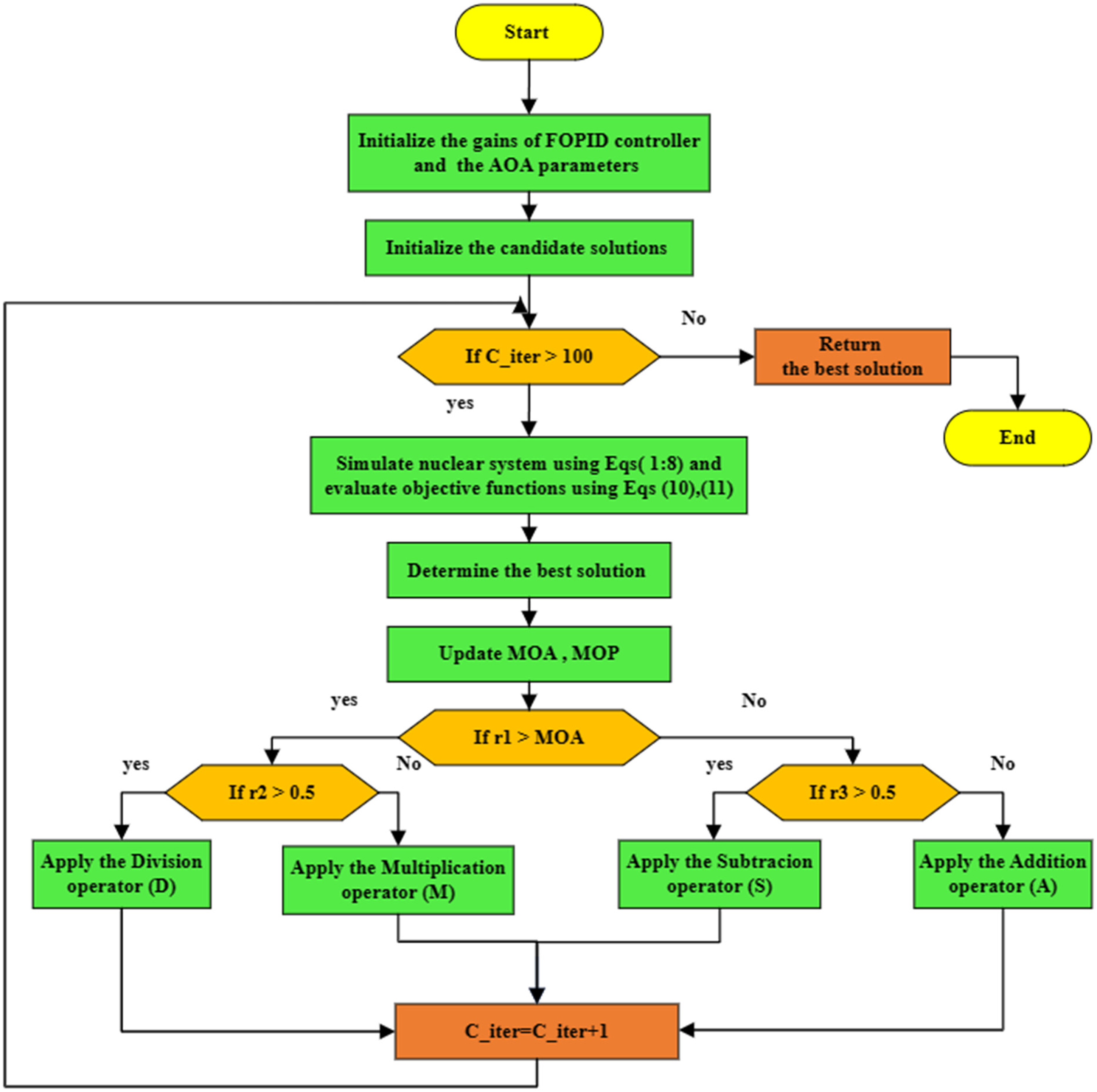
Flowchart of the proposed AOM. AOM: arithmetic operator mechanism.
Proposed controller design
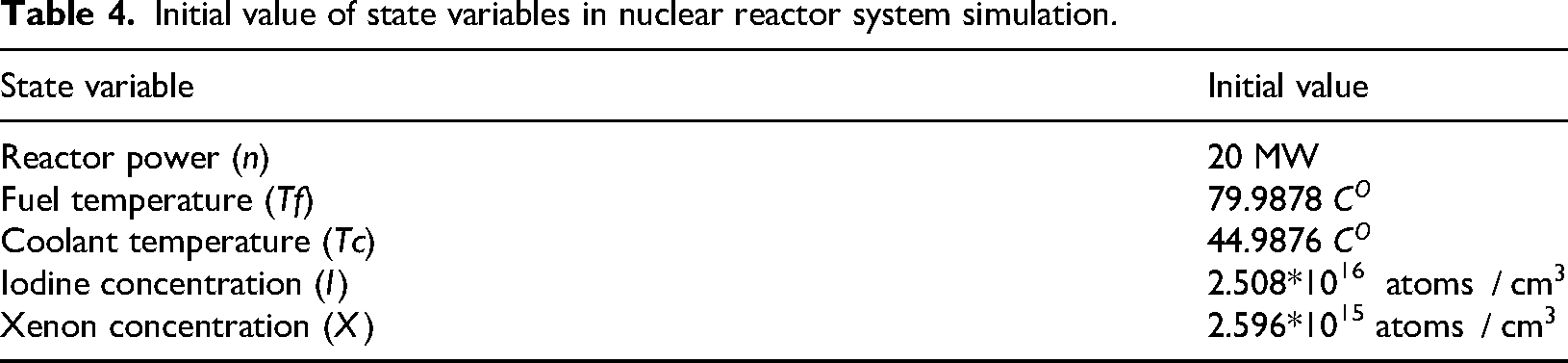
The main objective of the optimized FOPIDC presented here is to stabilize the power of the NR during load-following conditions. This study is applied to the ETRR-2 model. The suggested FOPIDC-based AOA with desired power is used to regulate the output power level through a control signal as shown in Figure 1. Whenever there is a change in the output power from the reference power, the difference between these two powers is considered as output feedback (OF) that was optimized using the AOM and PSO. This difference (error) dynamically corrects the FOPIDC gains in the process using the two applied algorithms. The initial state variables mentioned in Table 4 are used to simulate the fundamental NR system. The FOPIDC parameter settings are chosen as follows for the optimal optimization of the FOPIDC using the AOA and PSO algorithms:
Initial value of state variables in nuclear reactor system simulation.
To enhance accuracy and achieve optimal results, both AOA and PSO algorithms were executed 100 times. The minimum value of the objective function is considered the best value among the 100 iterations. The optimal values of the FOPIDC gains for the NR model obtained through AOA and PSO are presented in Table 5. The convergence profiles of AOA and PSO for IAE over 100 iterations are illustrated in Figure 7.
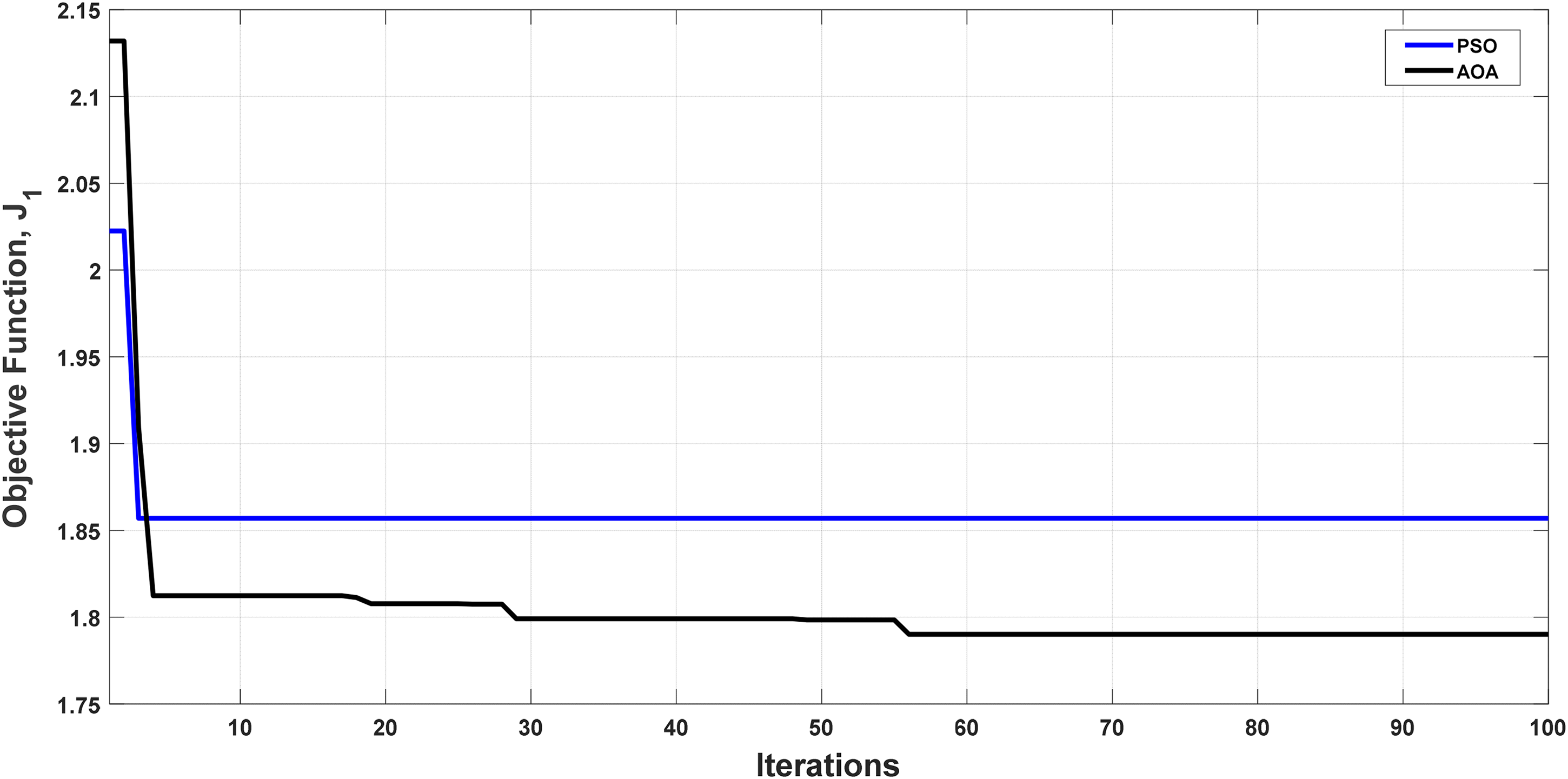
Convergence curve with AOA and PSO based on IAE. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
Tuning parameters of FOPID based on AOA and PSO.
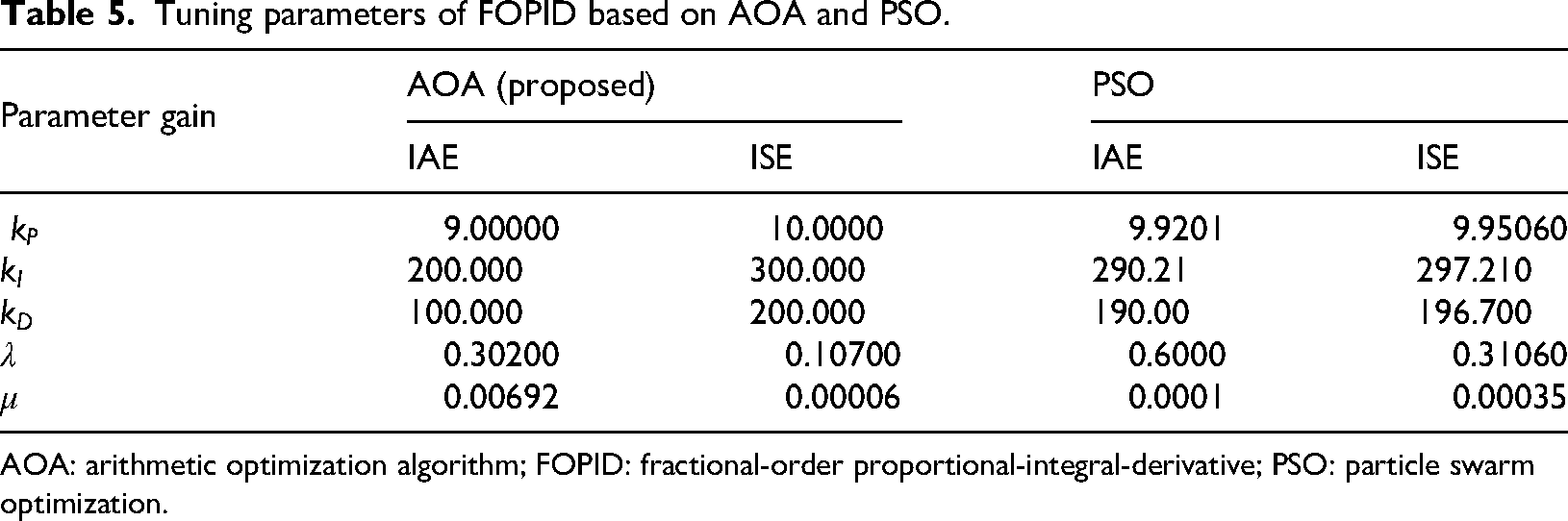
AOA: arithmetic optimization algorithm; FOPID: fractional-order proportional-integral-derivative; PSO: particle swarm optimization.
Results and discussions
The effectiveness of the FOPIDC-AOA in maintaining the NR's output power constant is evaluated in this article through two-test scenarios. The first scenario involves a fixed reference power, while the second scenario involves a variable reference power. Both tests are conducted using the MATLAB application. The following subsections provide a detailed analysis of these two scenarios.
Case 1: Constant power
In this case, the reference power is set at 100 MW, and the ETRR-2 system is examined with and without the proposed FOPIDC. The AOA and PSO techniques are utilized to optimize the FOPIDC gains. The optimized FOPIDC gains for two different objective functions (IAE and ISE) are presented in Table 2.
Without a controller, the NR power in the system, as shown in Figure 8, increased to a maximum of 165% of the rated power, posing a risk of explosion or detachment from the system. Additionally, as depicted in Figure 8, the NR power did not reach a steady-state value even after 1 minute without the controller. However, when the optimized AOA-FOPIDC and PSO-FOPIDC are employed, considering both IAE and ISE objective functions, the NR output power profile is significantly improved. The performance of the NR power is better with the AOA-FOPIDC compared to the PSO-FOPIDC when considering both objective functions.
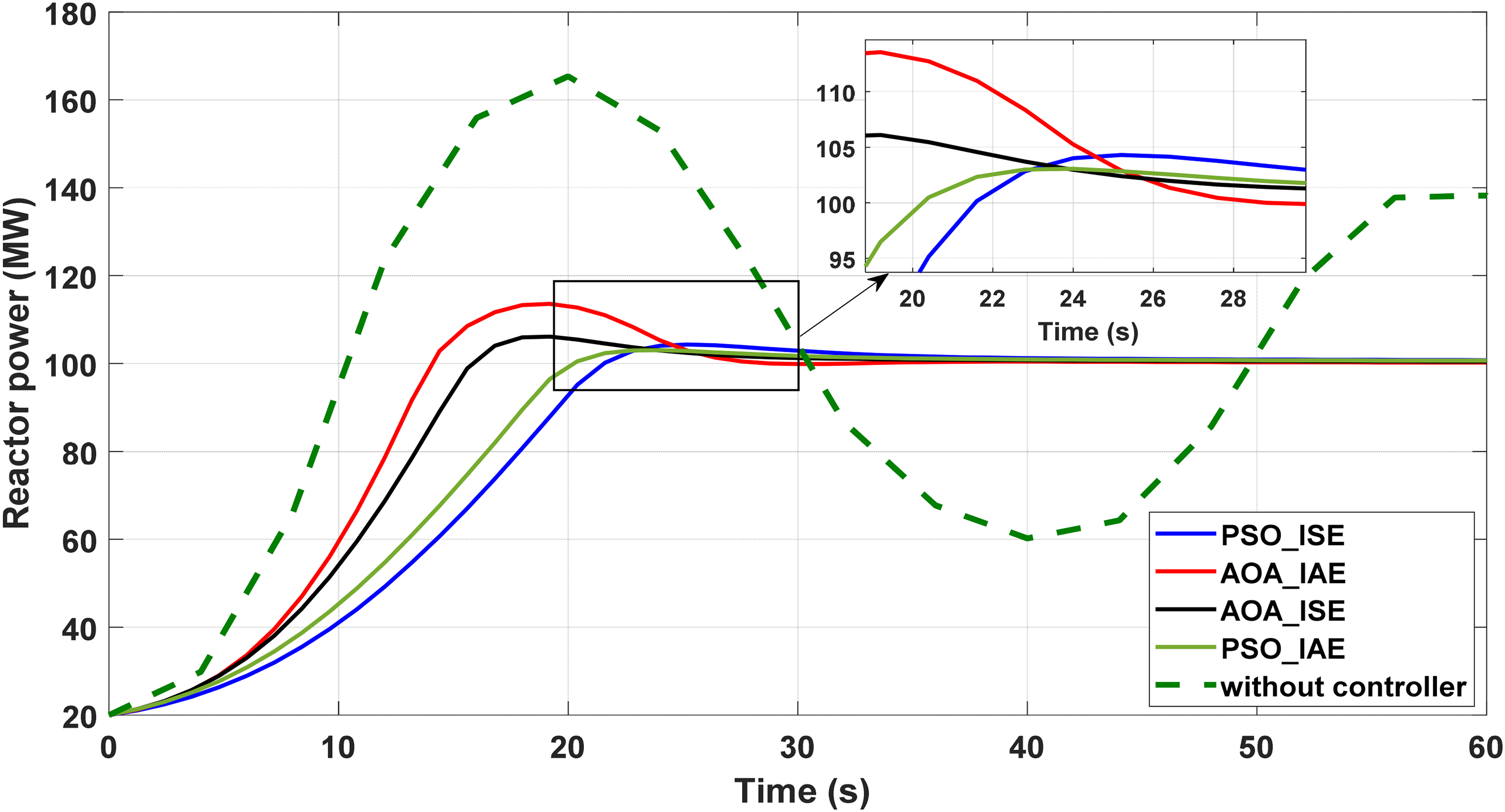
Power response with AOA and PSO based on IAE and ISE. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
The state variable responses of the ETRR-2 NR system are enhanced when the proposed AOA is implemented instead of using the PSO algorithm. In comparison to PSO, the AOA-FOPIDC successfully reduced the OV and ST for selected state variables of the nuclear systems, as illustrated in Figures 9 to 14. The chosen state variables for evaluating the performance of the proposed AOA-FOPIDC are the second, third, and sixth delayed neutrons, coolant and fuel temperatures, xenon, and iodine.
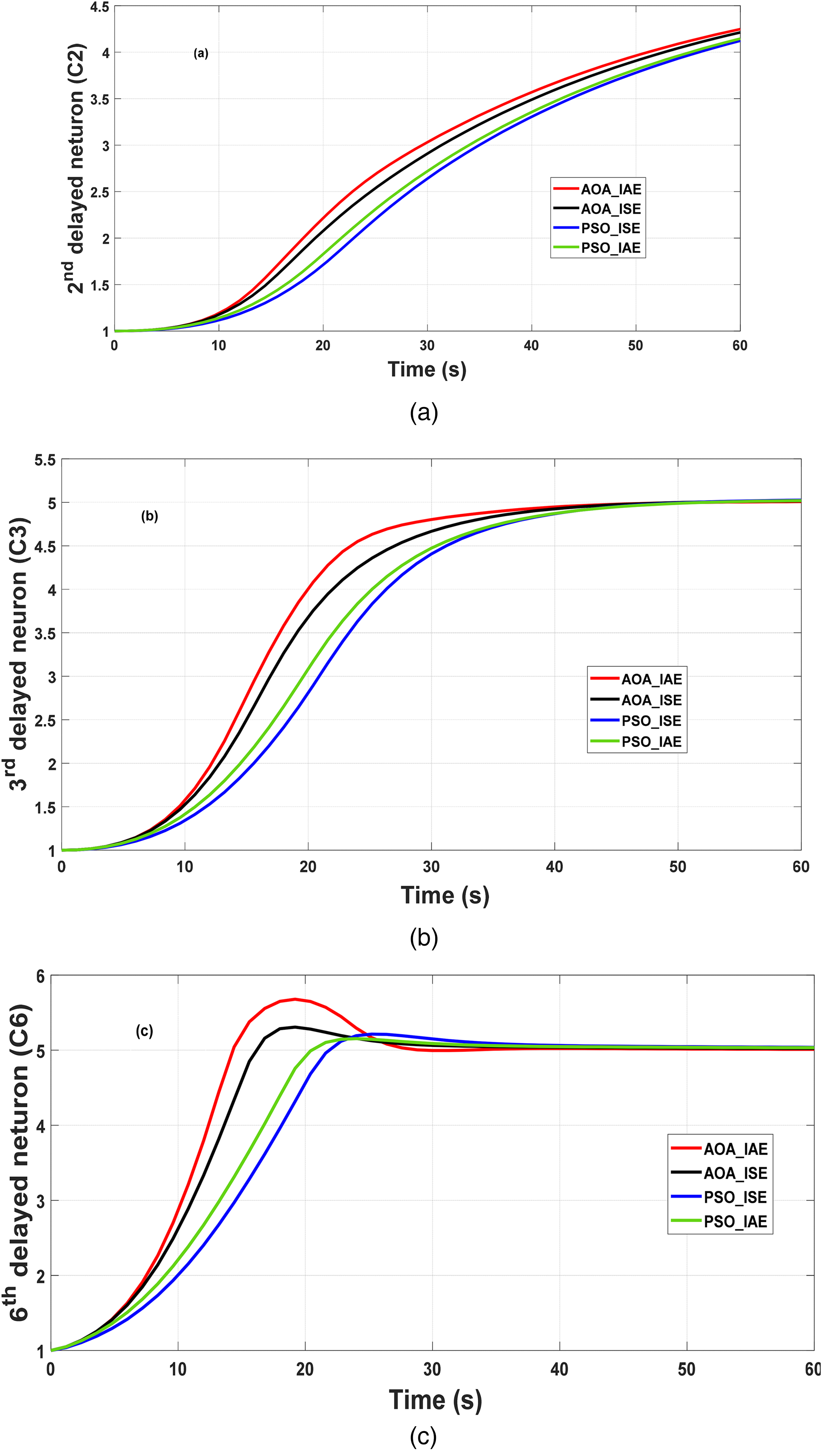
Delayed neuron responses with AOA and PSO based on IAE and ISE. (a) Second delayed neutron; (b) third delayed neutron; and (c) sixth delayed neutron. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
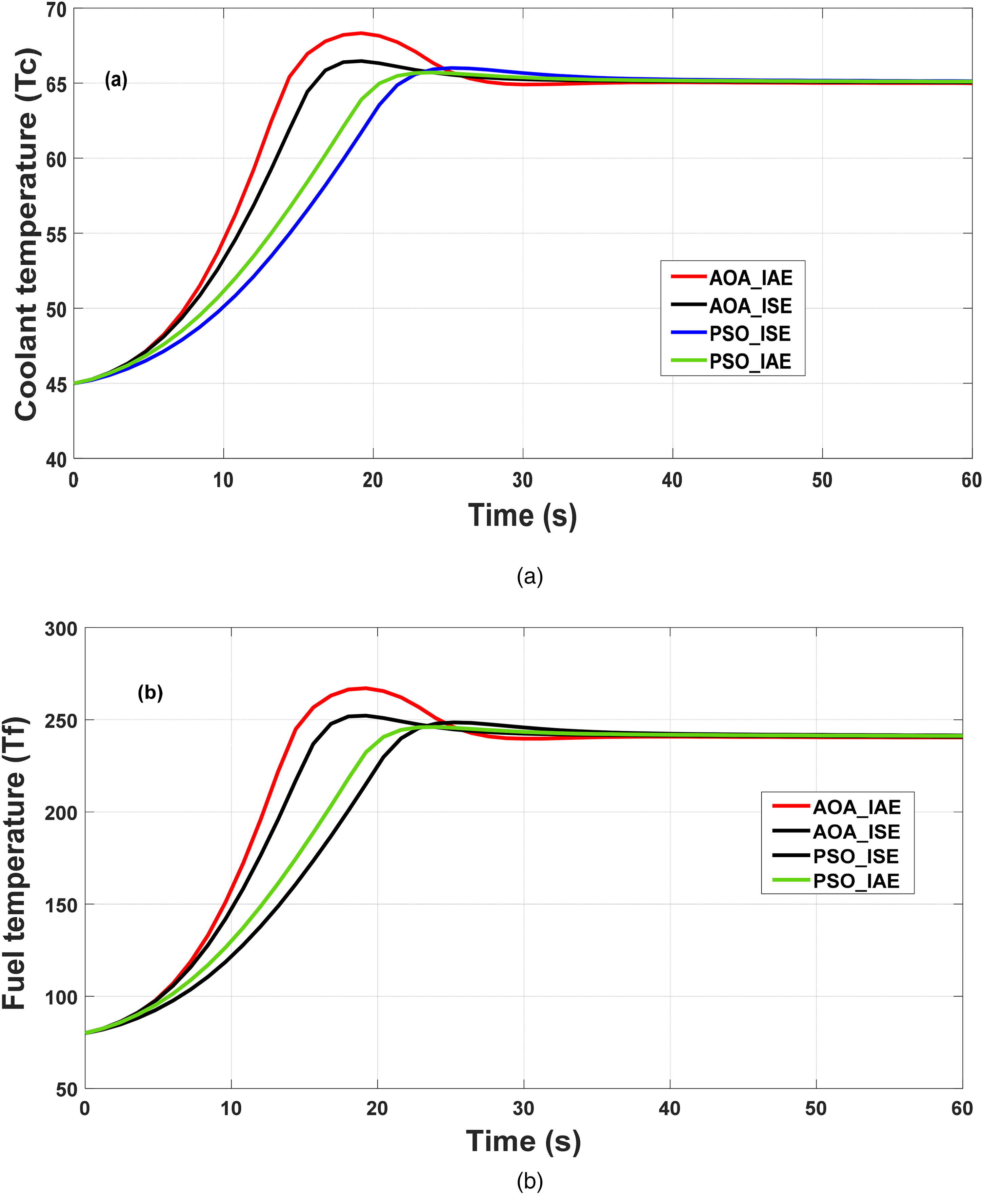
Temperature response with AOA and PSO based on IAE and ISE. (a) Coolant temperature and (b) fuel temperature. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
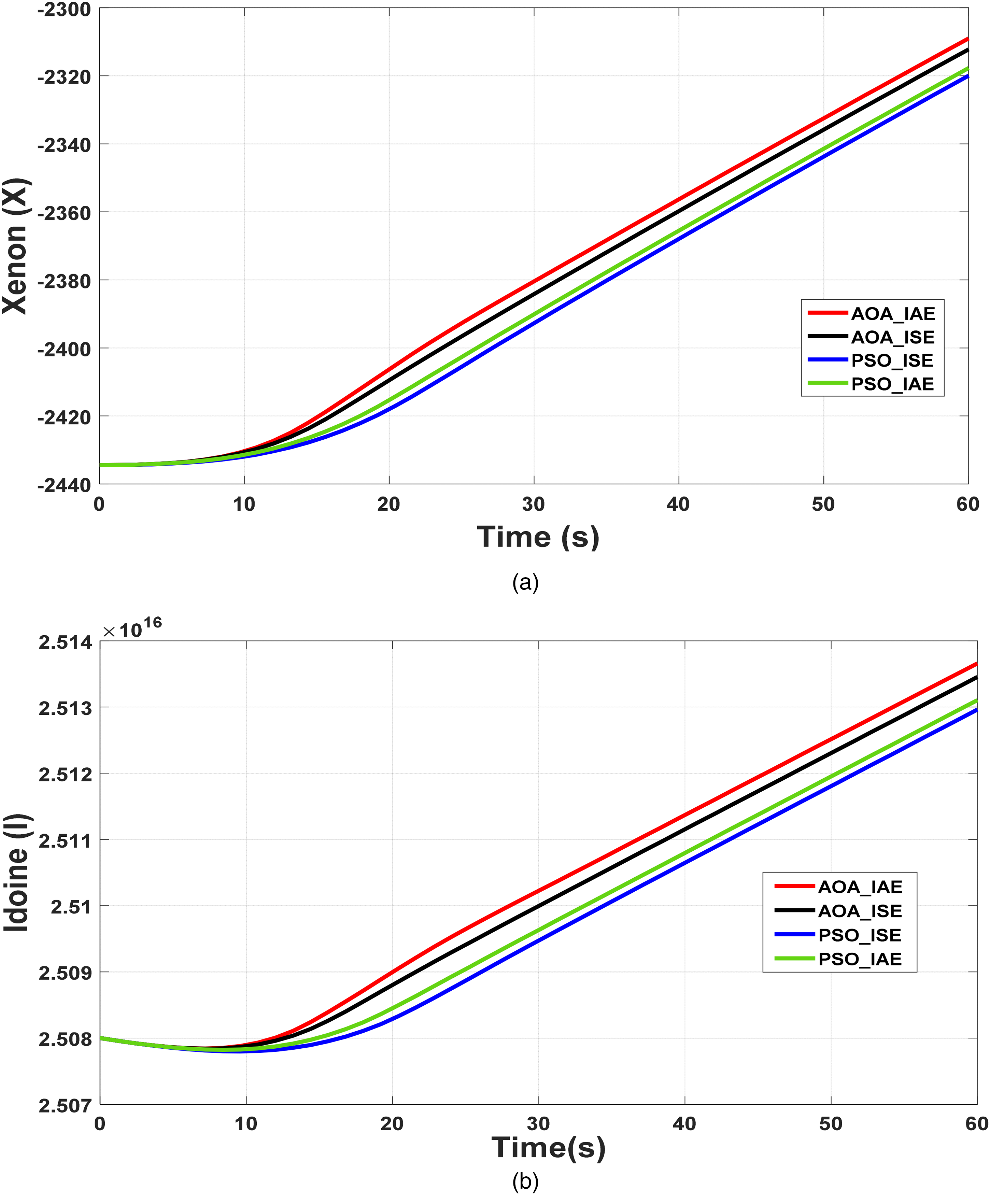
Xenon and iodine responses with AOA and PSO based on IAE and ISE. (a) Xenon and (b) idoine. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
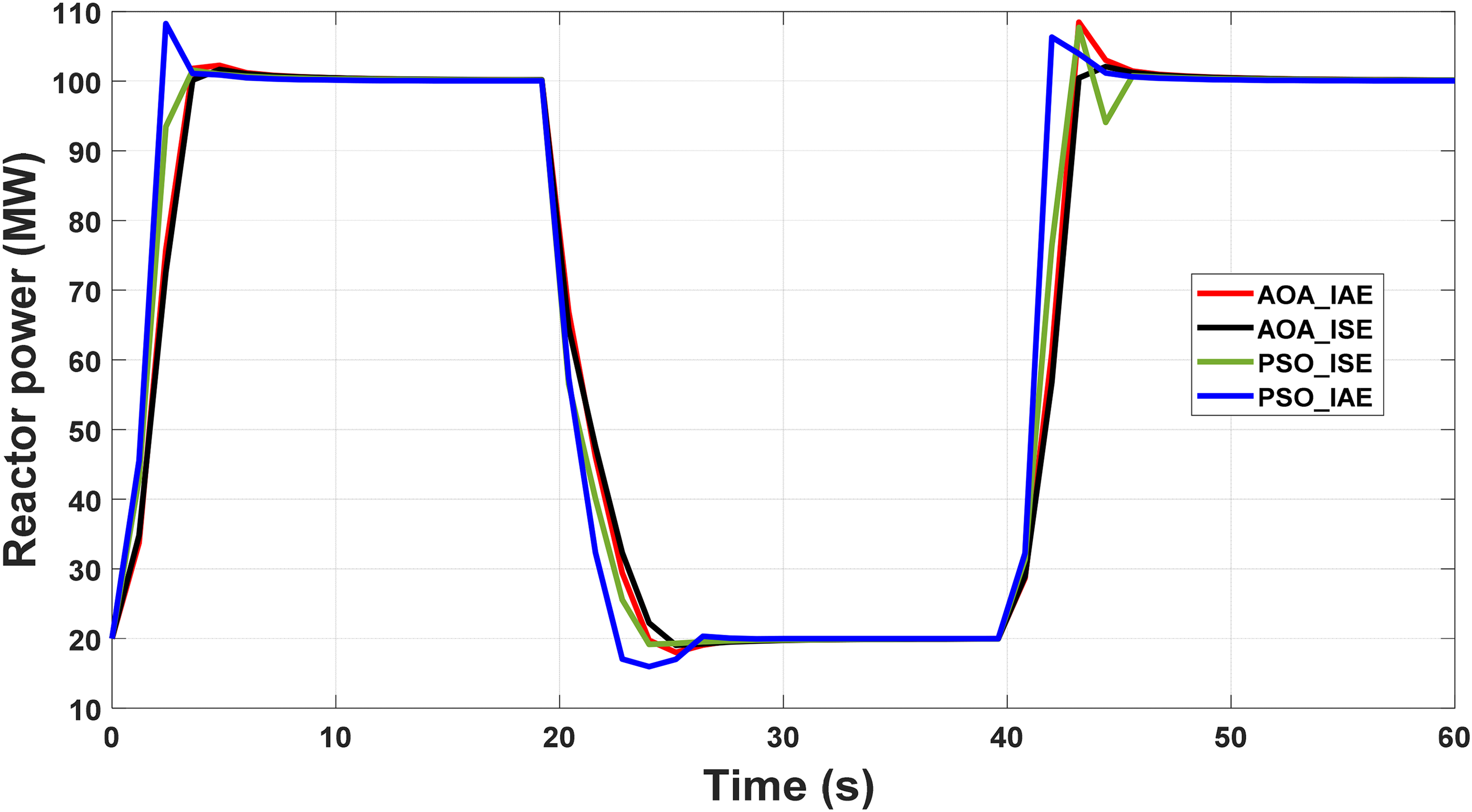
Power response with AOA and PSO based on IAE and ISE in power change. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
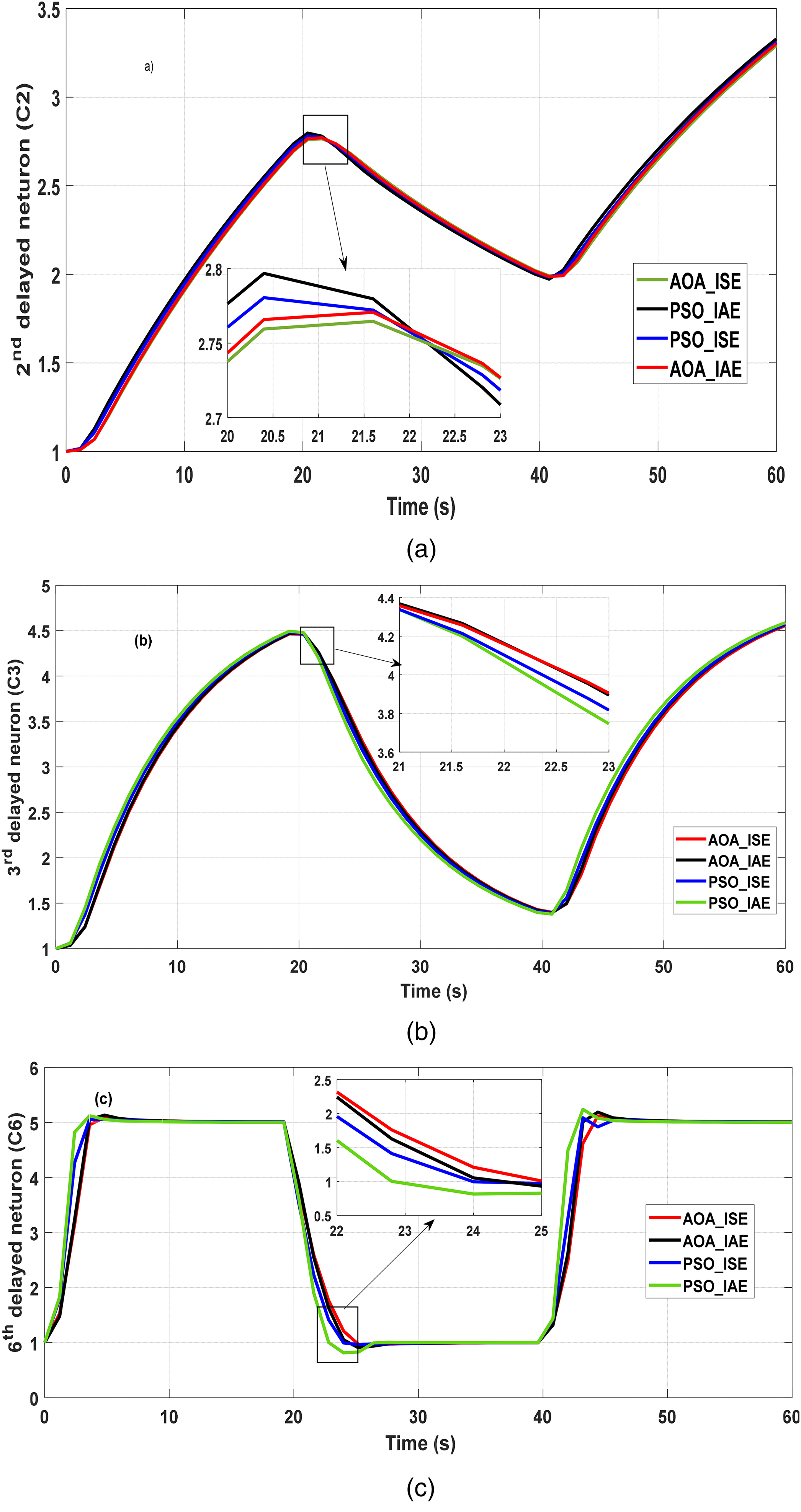
Delayed neuron responses with AOA and PSO based on IAE and ISE. (a) Second delayed neturon; (b) third delayed neturon; and (c) sixth delayed neturon. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
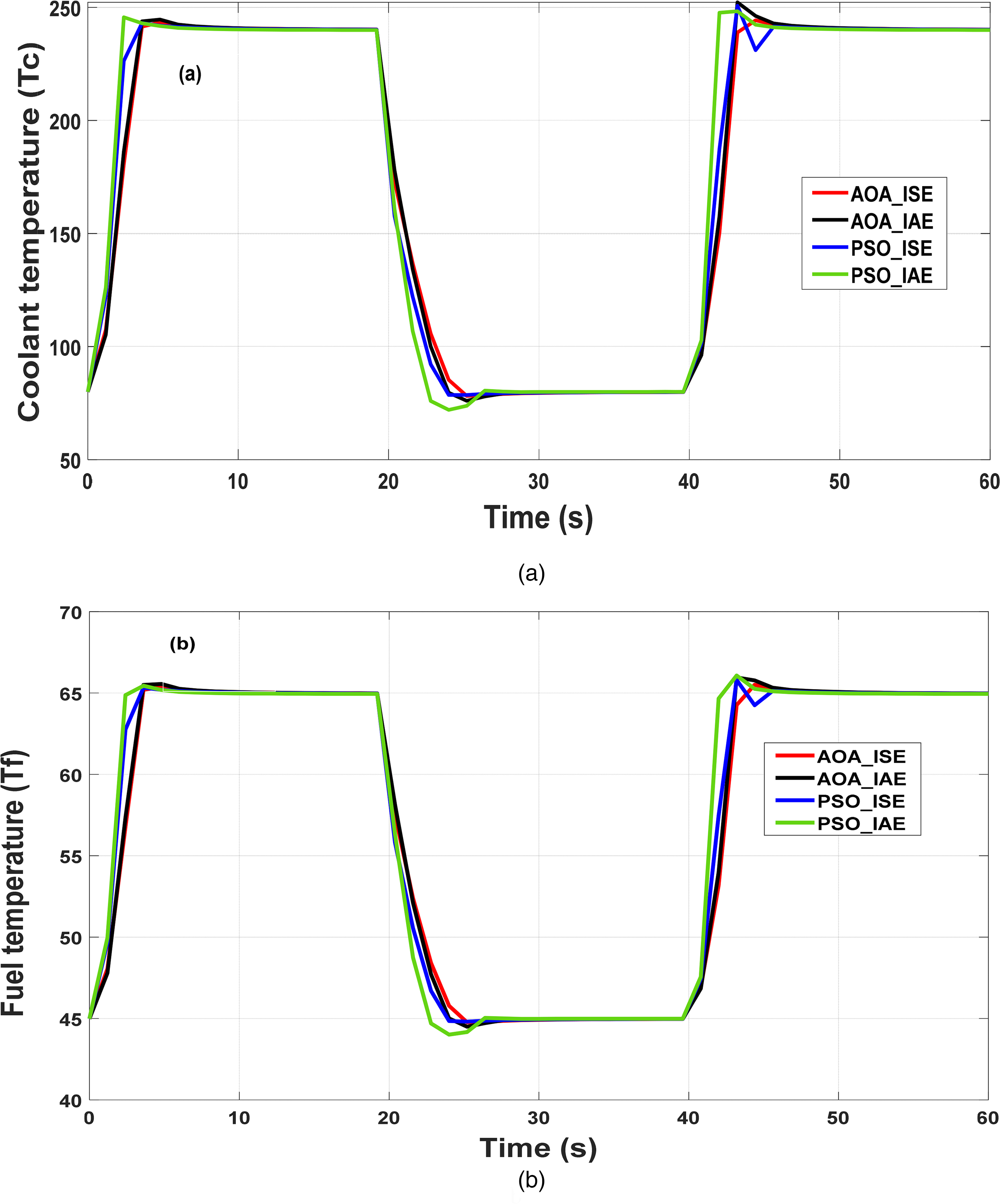
Temperature response with AOA and PSO based on IAE and ISE. (a) Coolant temperature and (b) fuel temperature. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
For the second, third, and sixth delayed neutrons, the performance is improved when using AOA-FOPIDC compared to PSO-FOPIDC, as shown in Figure 10(a) to (c). The OF-IAE provides the best performance, as depicted in Figure 9. The proposed AOA-FOPIDC enhanced the coolant and fuel temperatures, as shown in Figure 11(a) and (b). Additionally, the application of AOA-FOPIDC led to improvements in the xenon and iodine profiles, as depicted in Figure 11(a) and (b).
Case 2: Variable power
The desired power of the ETRR-2 abruptly dropped from 100 to 20 MW between 20 and 40 seconds. This abrupt change was applied to evaluate the effectiveness of the suggested optimized FOPIDC in tracking the new reference power while improving certain control indices. The gains of the FOPIDC were adjusted using AOA and PSO. AOA showed better performance when considering both ISE and IAE as objective functions in comparing the NR power responses with AOA and PSO. In Figure 12, it can be seen that the NR power response using an AOA-FOPIDC resulted in a decreased maximum OV and a shorter ST when considering ISE.
Considering the two OFs, other state variables of the nuclear system were investigated using AOA-FOPIDC and PSO-FOPIDC. These variables include the second, third, and sixth delayed neutron, coolant and fuel temperatures, xenon, and iodine. The results show that the AOA-FOPIDC-based IAE outperformed the AOA-FOPIDC-based ISE and PSO-FOPIDC-based ISE and IAE, as depicted in Figures 13 to 15. The comparison between the maximum OV and ST for the selected NR system state variables when using AOA-FOPIDC and PSO-FOPIDC considering the two objectives is summarized in Table 6.
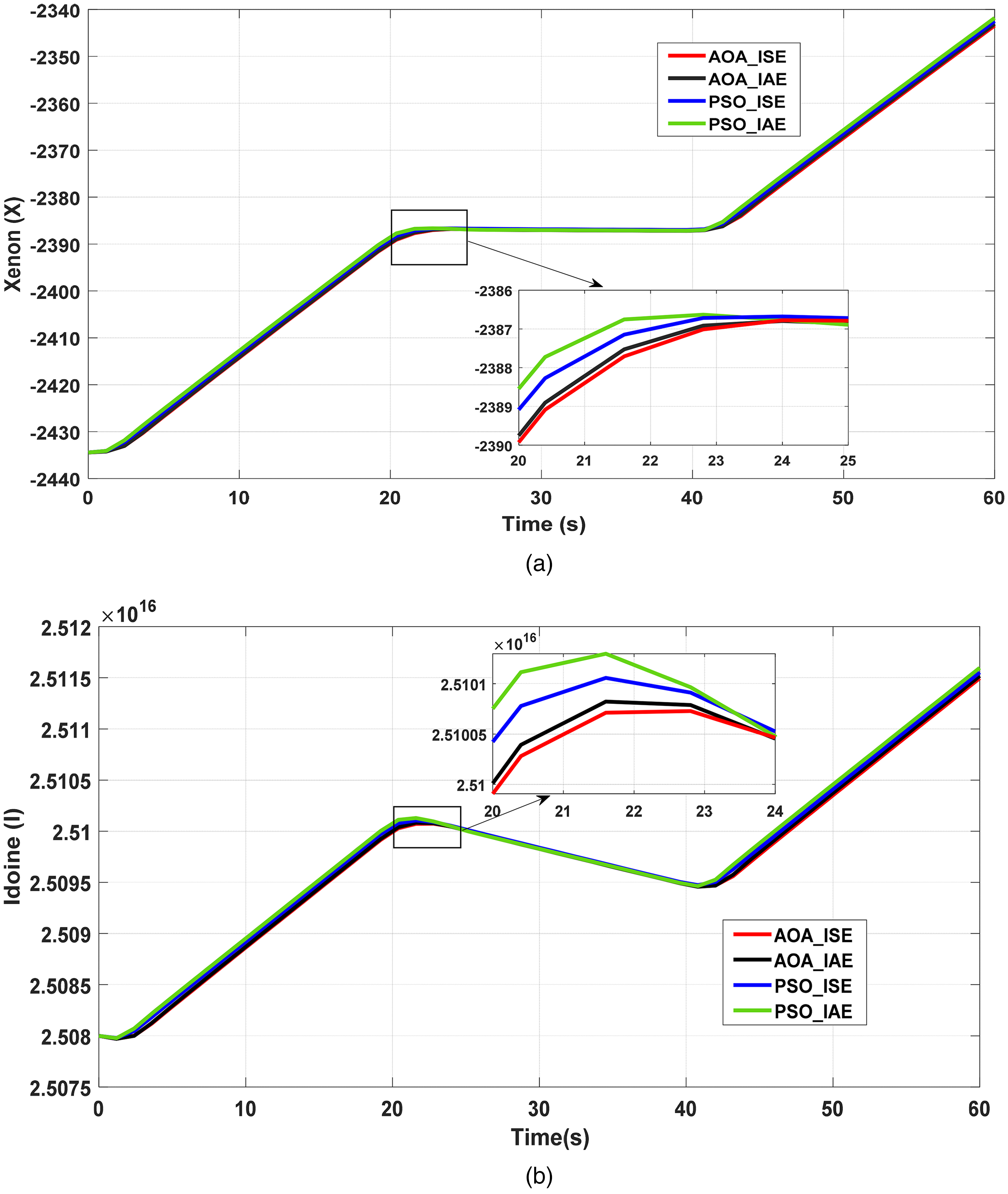
Xenon and iodine responses with AOA and PSO based on IAE and ISE. (a) Xenon and (b) idoine. AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
The maximum peak overshoot and settling time values of some state curves are based on AOA and PSO in the case of IAE and ISE.
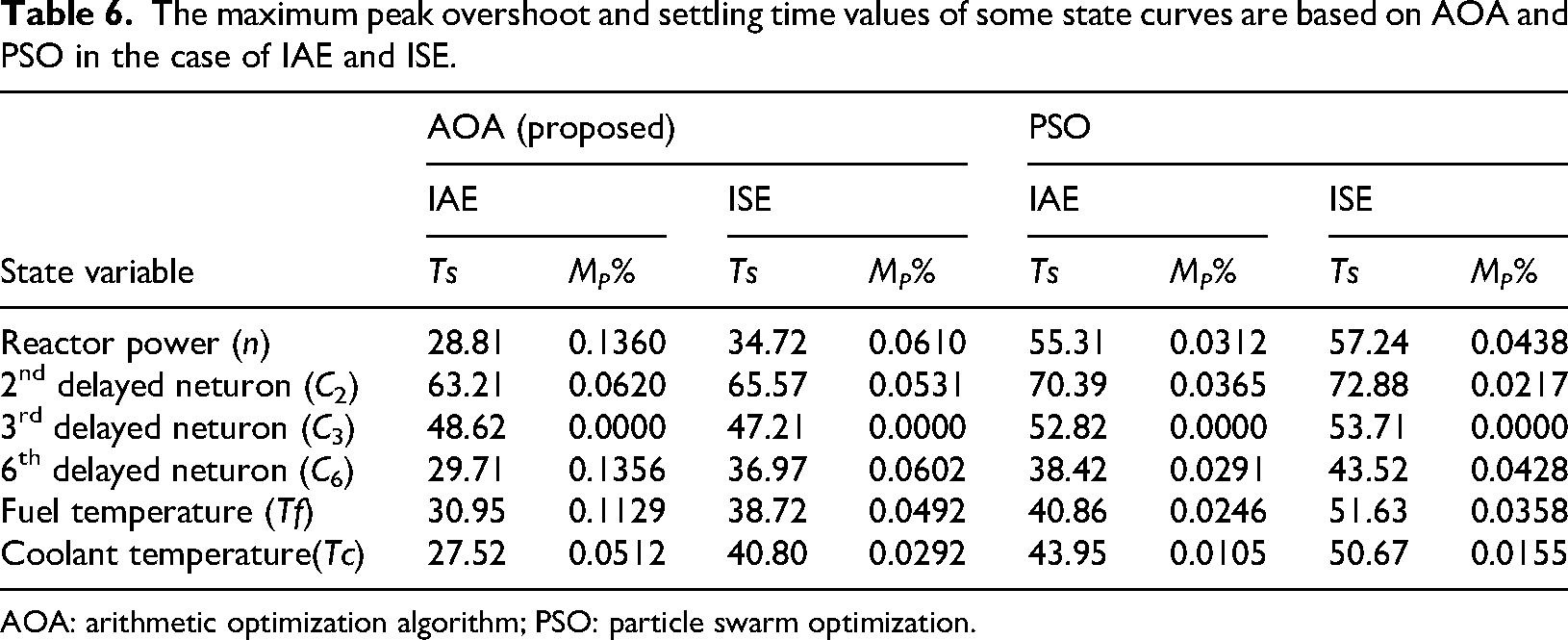
AOA: arithmetic optimization algorithm; PSO: particle swarm optimization.
Extended discussion of results
From the comparative results of the constant and variable power scenarios for the FOPID controllers optimized by the AOA and the PSO, it was seen that there was a substantial difference in performance, well above the realm of numerical superiority. The AOA controller, indeed, has always shown reduced overshoot and lesser settling time, across all major state variables. This performance has either way benefited from the capability of the AOM with better exploration and exploitation and finer convergence towards the optimal gain sets. A prime example would be the rapid adjustment of rod reactivity during sudden power deviations, indicating effective tracking and system stability under stress conditions: a fundamental requirement for deployability in nuclear reactors.
Furthermore, IAE-based optimizations yielded faster response compared to those based on ISE. These might suggest that, while squared error minimization is employed, absolute error minimization allows for faster system response, which seems crucial in actual reactor control because transient behavior minimization is of utmost importance. In both test scenarios, the improved xenon and iodine dynamics under AOA-FOPIDC blatantly demonstrated its capacity to suppress reactivity oscillations due to fission product poisons, an issue that has historically jeopardized safe reactor operation.
The PSO is still a robust optimization technique; however, it is characterized by a lower convergence rate and random performance variability over iterations seen in their convergence profiles. Such performance variability can result in suboptimal controller tuning, particularly in safety-critical applications that demand consistent and repeatable performance. In contrast, AOA has a more robust convergence, and the majority of runs exhibit lower objective function values. This distinction further bears the general applicability of AOA in control applications that require both reliability and precision.
From control systems theory, the robustness of the AOA-FOPID could also be interpreted in terms of phase and gain margin properties, which were not computed systematically within this study. Future work can include these analyses in the frequency domain to further substantiate this claim. However, the current time-domain results already indicate that this controller excels in rejecting disturbances, steady state tracking, and accommodating nonlinearities in the nuclear reactor model.
These group of results reinforce that the optimized AOA-FOPIDC is not just greater numerically, but rather potently ensures systemically stable, safe, and efficient reactor power regulation, thereby marking a significant progress toward more intelligent and adaptive control of nuclear energy systems.
The superiority in performance of the AOA-FOPID controller, from the lens of control theory, has been attributed to the increase in the solution search space and tuning freedom brought about by the fractional parameters. System response characteristics to dynamic changes can be adjusted more freely than the traditional PID controllers due to the use of both integral and derivative orders (λ, μ). The result is smooth error trajectories and less oscillatory behavior due to memory effects and nonlocal dynamics. Whereas classically tuned PID controllers are limited by inconsistent convergence rate and poor particle diversity, in AOA, harmonic mean proportionating offers an appropriate balance between exploration and exploitation, thereby providing optimal gain search.
Conclusion
This article compared the performance of FOPID controllers optimized by AOA and PSO in maintaining NR power under both constant and variable reference conditions. From the simulated results, it is seen that the AOA optimization provided a much better-performing FOPID controller in terms of tracking accuracy and transient response as compared to the PSO optimization. Quantitatively, the AOA-FOPID controller was able to reduce the overshoot in reactor power by almost 38% and improve settling time by 25% under variable power conditions. In addition, the IAE values of reactors controlled by AOA-tuned controllers were consistently lower for both test cases, thus indicating a better steady-state tracking accuracy.
The advantage of the AOA-FOPID controller is qualitative in that it relates to the more robust convergence to global optima in the parameter space controlled by the algorithm's balanced exploration-exploitation behaviour. In addition, the inclusion of fractional orders in the design of the controller gives it more flexibility under dynamic plant conditions, as well as memory effects related to neutron kinetics and poison feedback. This has also been seen in the AOA-FOPID controller through its suppression of xenon oscillations, which means that it would also be able to demonstrate deeper and more stable iodine dynamics, lending further strong support for its application in real reactor systems that require high safety demands.
In short, the adapter of the AOA-FOPID control architecture promises to be a compelling mechanism for adaptive regulation and precision in the management of NRs. Future works could include hardware-in-the-loop implementation and the effect of tuning the controller on core thermal-hydraulic feedback characteristics; in addition, it might be helpful to conduct comparative studies with other metaheuristic optimization frameworks such as Grey Wolf Optimizer or Whale Optimization Algorithm.
Footnotes
Author note
Wulfran Fendzi Mbasso is also affiliated with Applied Science Research Center. Applied Science Private University, Amman, Jordan.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
All relevant data are within the article.