
Abstract
Accurate prediction of photovoltaic (PV) power generation is the key to daily dispatch management and safe and stable grid operation. In order to improve the accuracy of the prediction, a finite iterative PV power prediction model with long range dependence (LRD) characteristics was developed using fractional Lévy stable motion (fLsm) and applied to a real dataset collected in the DKASC photovoltaic system in Alice Springs, Australia. The LRD prediction model considers the influence of current and past trends in the stochastic series on the future trends. Firstly, the calculation of the maximum steps prediction was introduced based on the maximum Lyapunov. The maximum prediction steps could provide the prediction steps for subsequent prediction models. Secondly, the order stochastic differential equation (FSDE) which describes the fLsm can be obtained. The parameters of the FSDE were estimated by using a novel characteristic function method. The PV power forecasting model with the LRD characteristics was obtained by discretization of FSDE. By comparing statistical performance indicators such as root max error, mean square error with Conv-LSTM, BiLSTM, and GA-LSTM models, the performance of the proposed fLsm model has been demonstrated. The proposed methods can provide better theoretical support for the stable and safe operation of PV grid connection. They have high reference value for grid dispatching department.
Keywords
Introduction
Solar energy is a renewable energy source which has no pollution, easy to mine, widely distributed, and is the key to future clean energy (Wang et al., 2022). According to the forecast, the cumulative global PV installation is expected to reach 1721 GW by 2030 and further increase to 4670 GW by 2050. However, when PV power generation is connected to the grid, the randomness, and intermittency of photovoltaic power generation bring difficulties to the stable operation and system scheduling of the power grid. Therefore, accurate prediction of PV power generation plays an important role in the stable operation and safe scheduling of the power grid (Li et al., 2022a).
In recent years, more and more methods have been widely used in the field of PV power prediction. Many machine learning models including some deep learning models have been well applied in the fields related to PV power generation prediction. In addition, several hybrid model-based methods are also proposed for improving prediction accuracy.
Li et al. (2022b) proposed a PV power short-term prediction model combining Pearson correlation coefficient, ensemble empirical modal decomposition, sample entropy, sparrow search algorithm, and long short-term memory network (LSTM). The PV power prediction under different weather has high prediction accuracy. Wu et al. (2022) proposed a combined deep learning prediction method based on variational modal decomposition, fast correlation filtering, and bidirectional long short-term memory (BiLSTM) network to minimize the PV power prediction error. Qiu et al. (2022) proposed the LSTM neural network was improved using genetic algorithm to obtain the PV power prediction model. The LSTM considering both time and nonlinearity is used for training, and finally it is improved by genetic algorithm, and compared with traditional methods, so as to achieve more accurate prediction results. Wang et al. (2022) established FWA-CNN-GRU-based PV power prediction model through the combination and optimization of neural networks. The fireworks algorithm (FWA) was introduced to search for the optimal values of the hyperparameters of the network model with high prediction accuracy. Bai et al. (2022) proposed a new method for short-term PV power prediction using deep attention convolutional long and short-term memory (Conv-LSTM) networks and kernel density estimation. The proposed method can achieve the optimal fusion of historical data and clear sky prior knowledge, and significantly improve the accuracy of PV power prediction in all seasons of a year.
Although the above methods can achieve prediction of PV output power, they still have significant limitations. In recent years, the prediction of stochastic sequences with long range dependent (LRD) characteristics has become a hot research topic (Liu et al., 2021). However, there are still few studies on its application in photovoltaic power generation systems. The LRD model comprehensively considers the influence of past and current states on future states and can better predict a sequence of nonsmooth stochastic processes (Wu et al., 2020). Lévy motion is a stochastic process with stationary and independent increment, which is characterized by heavy-tailed distribution and infinite variance (Song et al., 2020). The flexibility of Lévy motion modeling makes it universal for a broad range of stochastic problems. The fractional Levy stable motion (fLsm) is determined instead by two parameters α and H, which can separately characterize the local irregularity and global persistence. For αH > 1, the subsequent value of random sequence can be calculated from the previous sequence (Duan et al., 2020). So that fLsm can describe the long correlation process more flexibly.
The prediction method used in this paper involves the maximum Lyapunov exponent and fLsm iterative prediction model. The maximum Lyapunov index is estimated using the small data method and the reciprocal of the maximum Lyapunov index is used to represent the maximum prediction steps. The fLsm iterative prediction model was established by Fractional Itos formula stochastic differential equation (SDE).First, the fractional Black-Scholes model was extended and the parameterized FSDE was obtained. The fLsm was discretized by Taylor series expansion of fractional order and the mathematical relationship between the increment of fLsm, and Levy's stable white noise was obtained and substituted into the discrete FSDE. Finally, the expressions of the fLsm finite difference iterative forecasting model proposed were obtained by using discrete FSDE and difference equation. We take the real PV data in DKASC PV system in Alice Springs, Australia, and numerical results demonstrate the effectiveness of the proposed method.
The article is structured as follows, the second section, Fractional Order Lévy Stable Motion Model and Parameter Implications. These features have proved the plausibility of the upper level fLsm to be true in predictive modeling. In the third section, fractional Lévy stable motion predictive modeling with parameter estimation. The parameters are estimated for the degenerate model. In the fourth section, it is applied to the Australian (DKASC) PV dataset and power prediction is performed. Finally, we conclude the article.
Fractional Lévy stable motion model
Lévy stable motion and parameter implications
The Lévy stable motion is a non-Gaussian stochastic process with LRD and high variability, using

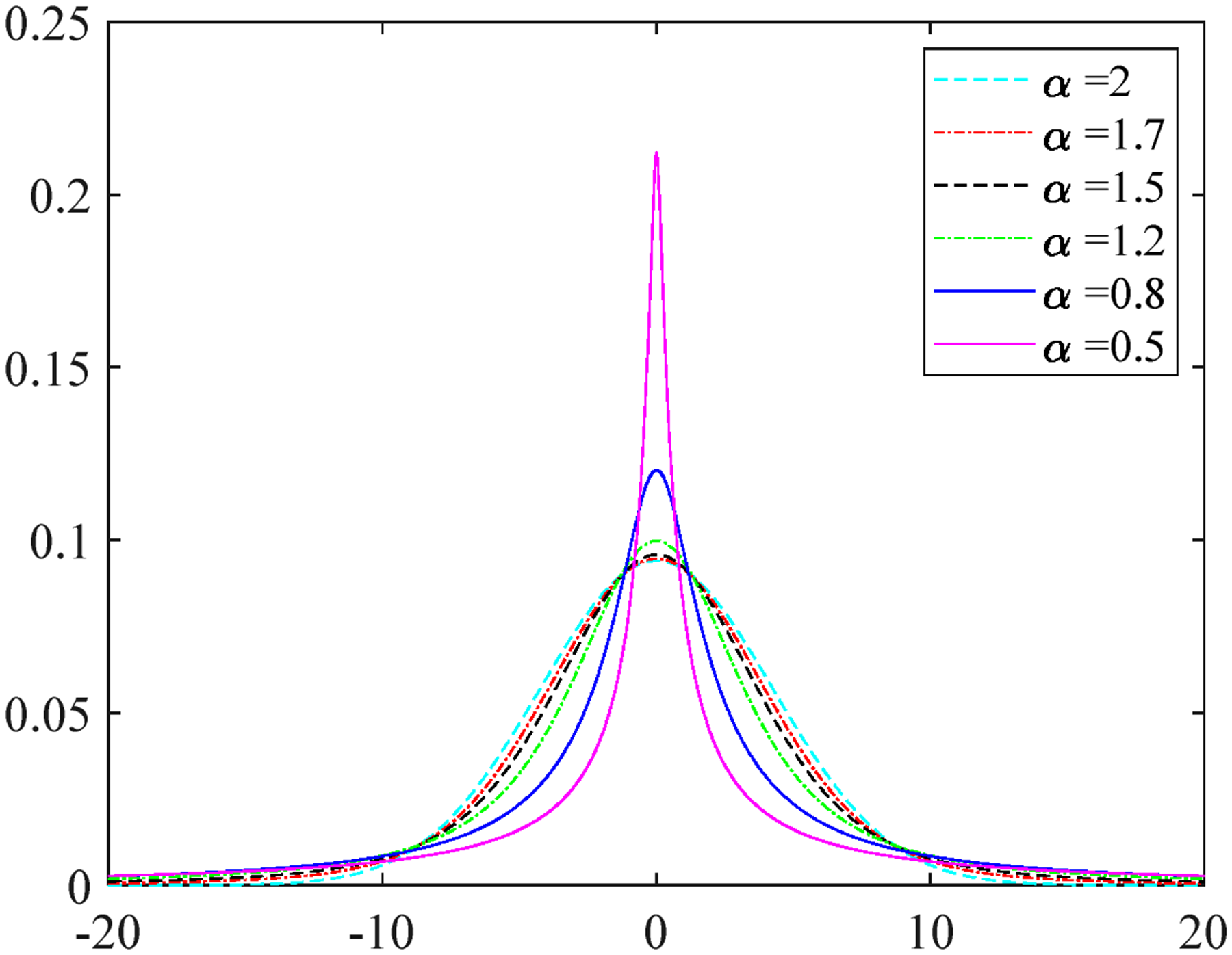
Influence of different characteristic index values on the probability density function.
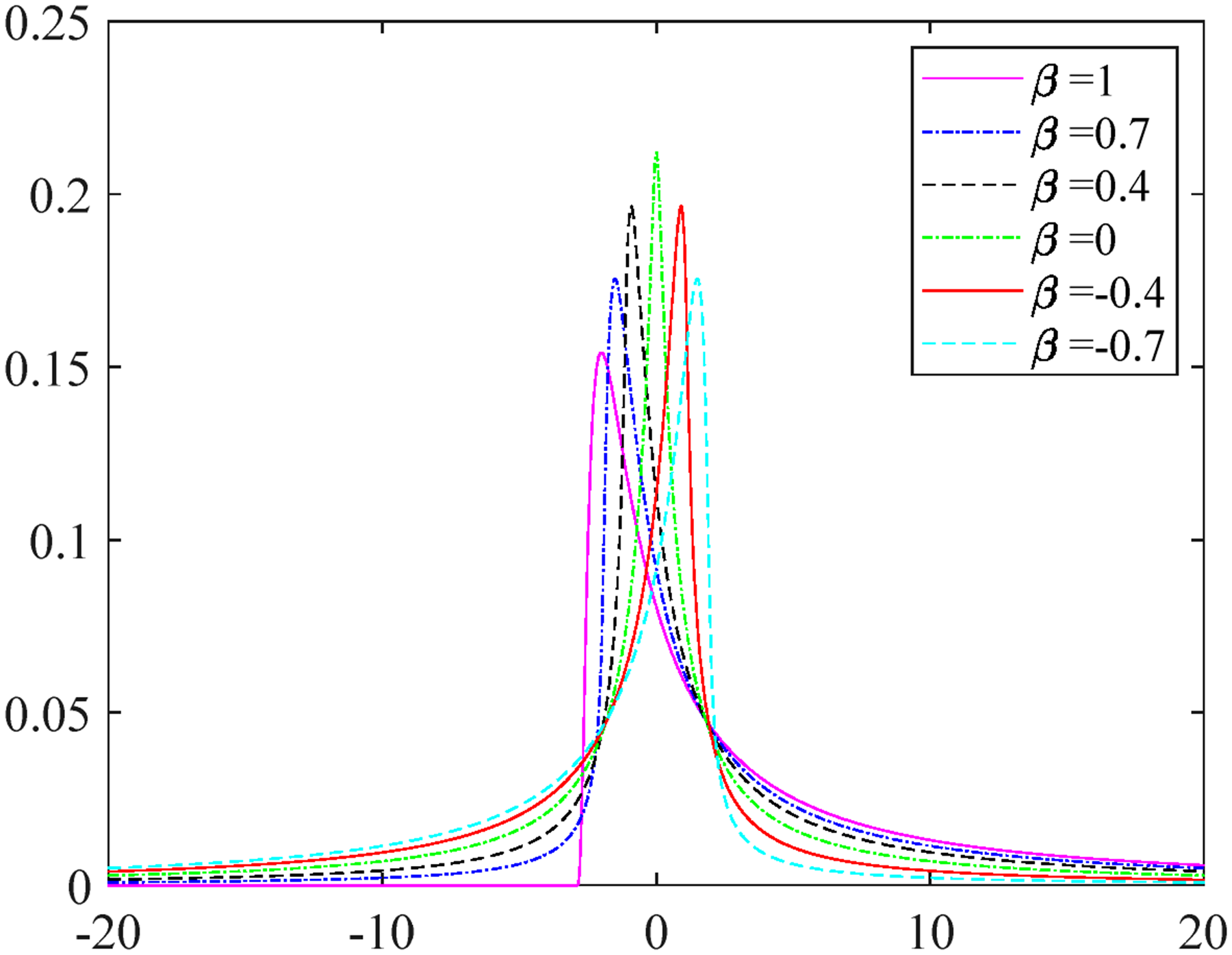
Influence of different symmetry parameter values on the probability density function.
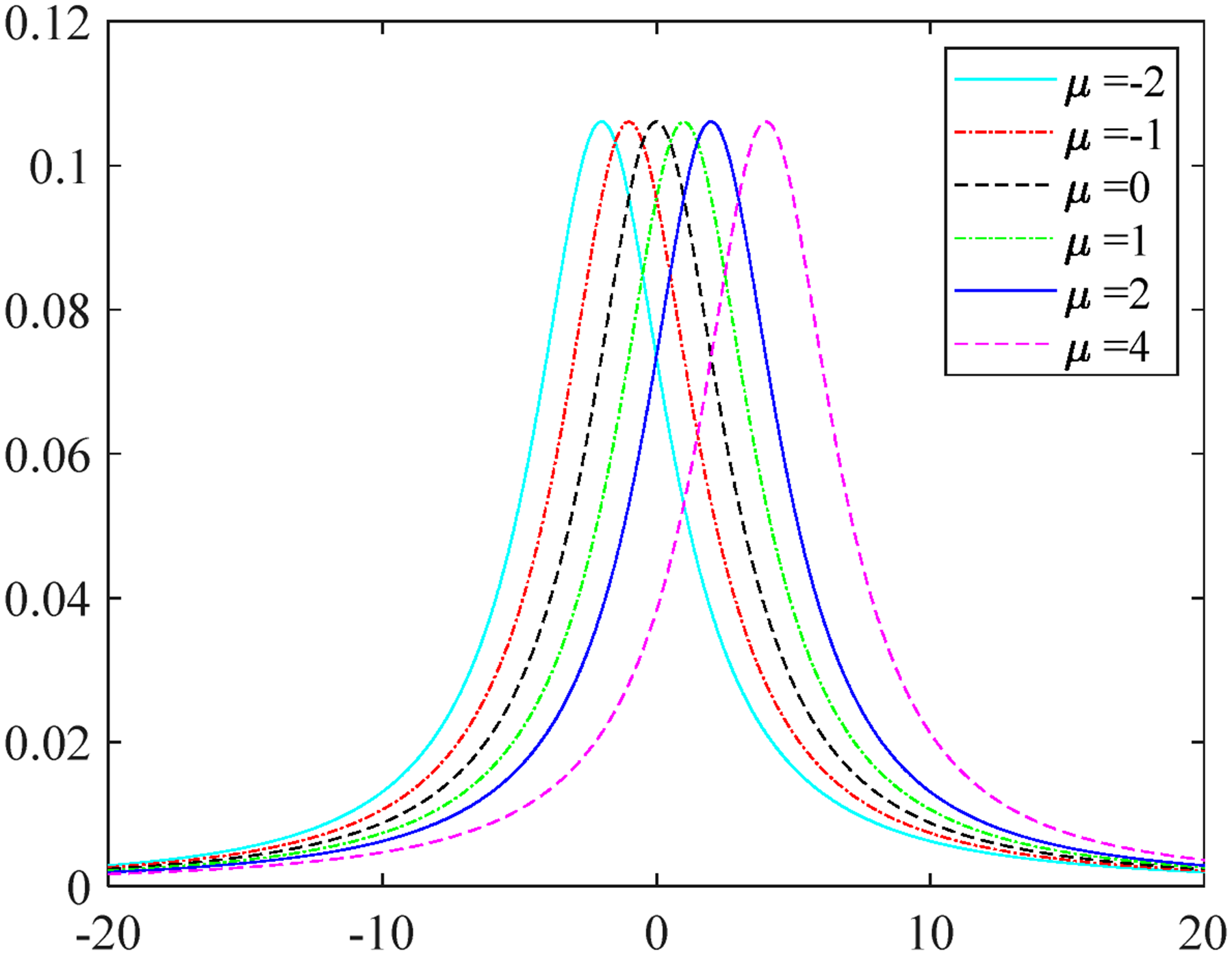
The probability density function for different location parameters.
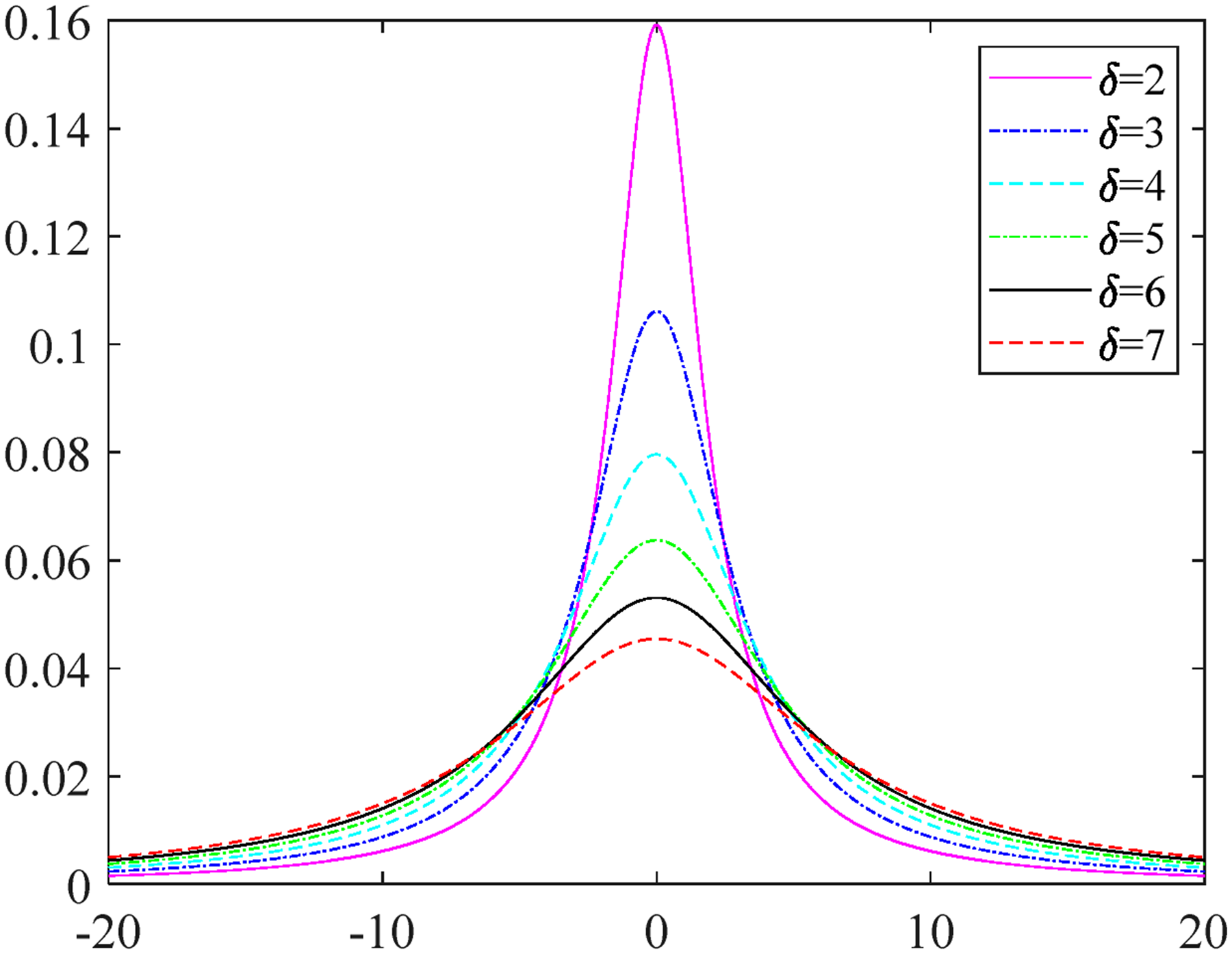
The probability density function for different scale parameters.
Fractional Lévy stable motion model
The fLsm model is given by the following stochastic integral (Li, 2010):

The incremental process of fLsm (i.e. fractional-order Gaussian noise introducing fractional-order Lévy stable noise) was derived by Kogon and Manolakis (Kogon and Manolakis, 1996), as shown in equation (3).

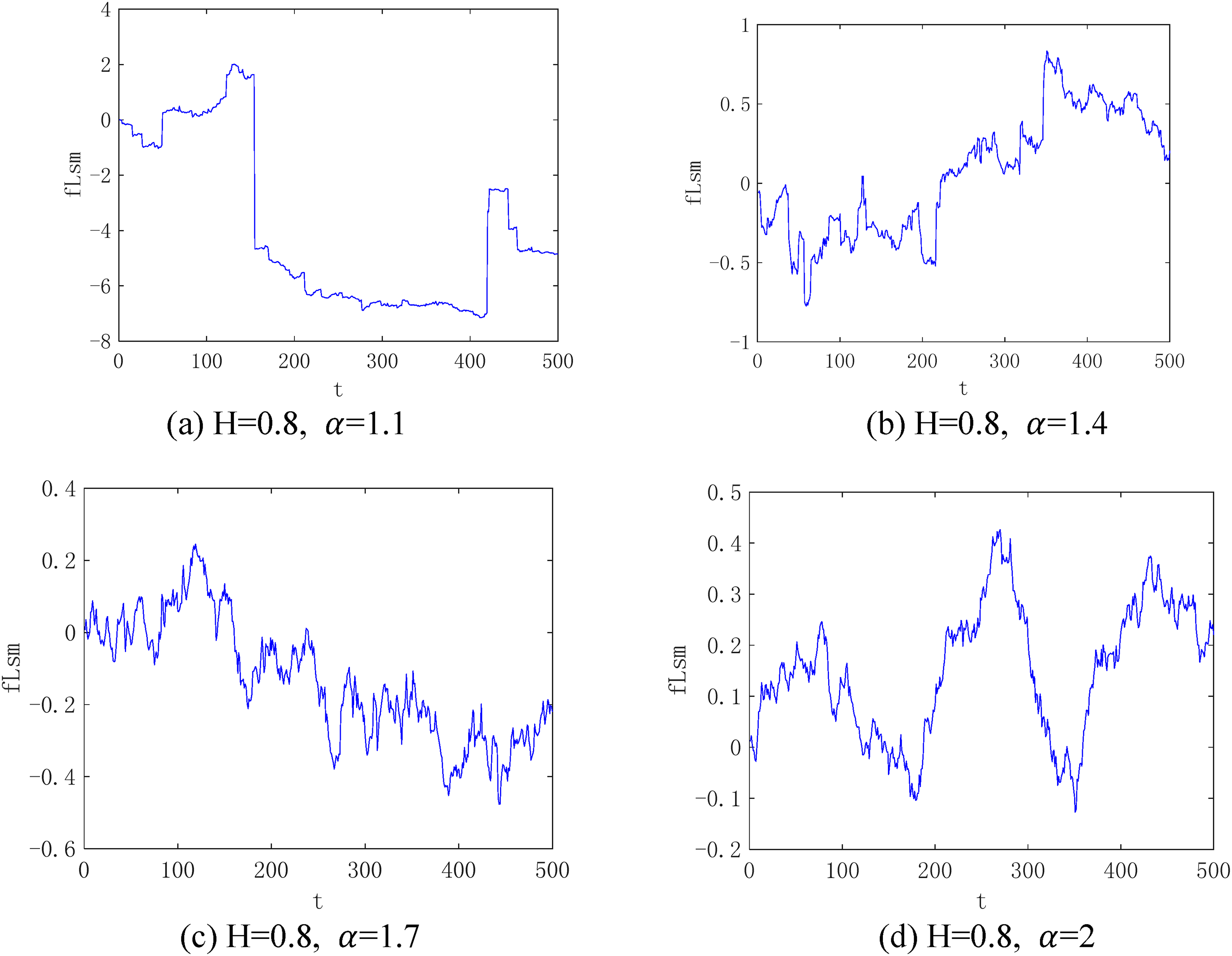
fLsm generated with different
Predictive modeling and parameter estimation for fractional Lévy stable motion
fLsm iterative difference prediction model
The SDE for the stable Lévy motion was proposed by Weron et al. (2005) and the equation is:










Maximum prediction step
In this article, the maximum Lyapunov coefficient is calculated to give the maximum predictable range of PV power and optimize the PV power prediction process. The methods for calculating Lyapunov exponent are general definition method, Wolf method, Jacobian method, P-parametric method, small data volume method, etc. In this article, the most widely used small data volume method is chosen, and the maximum predictable range
Step 1: Define the PV power sequence
Step 2: The Cao algorithm is used to calculate the embedding dimension m.
Step 3: Reconfiguration of phase space:

Step 4: The maximum Lyapunov coefficient



Parameter estimation of the fLsm prediction model
Accurate estimation of the stability exponent α, skewness exponent β, drift coefficient μ, and diffusion parameter δ is crucial for modeling fLsm-based prediction models. Several parameter estimation methods were introduced in the study of Wang et al. (2015), and the effectiveness of these methods was compared, including the great likelihood method, logarithmic moment method, eigenfunction method, and fractional low-order moment method. In this article, the eigenfunction method is used, and the parameter estimation process is as follows.
Step 1: Let
Step 2:

Logarithm of equation (18).


The estimated



Step 4: Parameter





Photovoltaic power forecasting and analysis
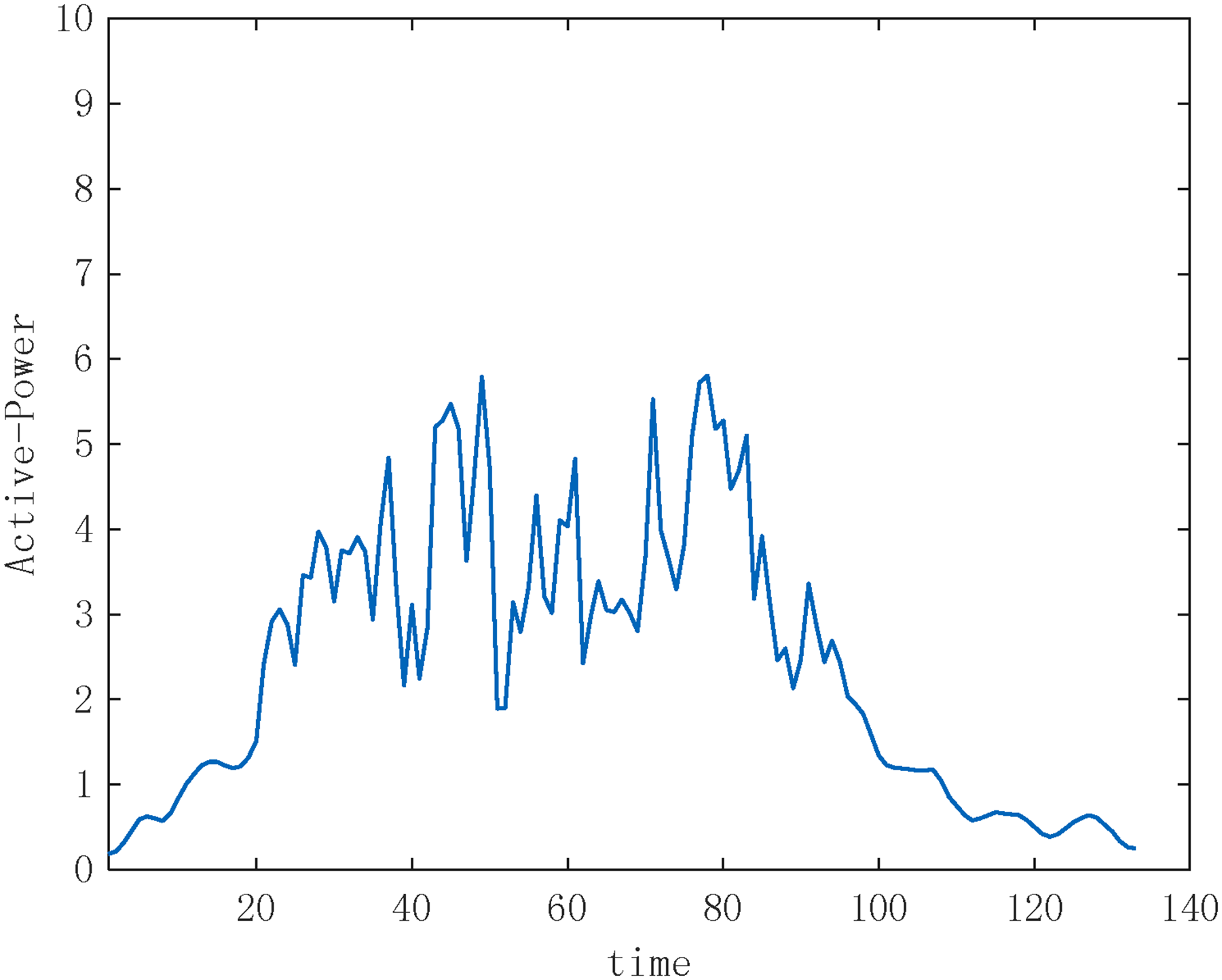
To validate the performance of the short-term PV power prediction model proposed in this article, the Australian (DKASC) PV dataset (with PV plant 17 (capacity of 16.8 kW) as the study object) was selected. The data were collected from 2010 to 2020 with a time interval of 5 min, with both meteorological features and power data (the Active_Power field is the power data). The meteorological characteristics are wind speed, temperature, humidity, wind direction, rainfall, total irradiance, scattered irradiance, etc. Because the output power of PV modules is significantly lower in the morning and evening, close to zero or zero most of the time, this article intercepts the Active_Power power data in the period from 7:00 to 18:00, a total of 133 data as the research object.
Figure 6 shows the power data from 7:00 to 18:00 on 2010/3/12.
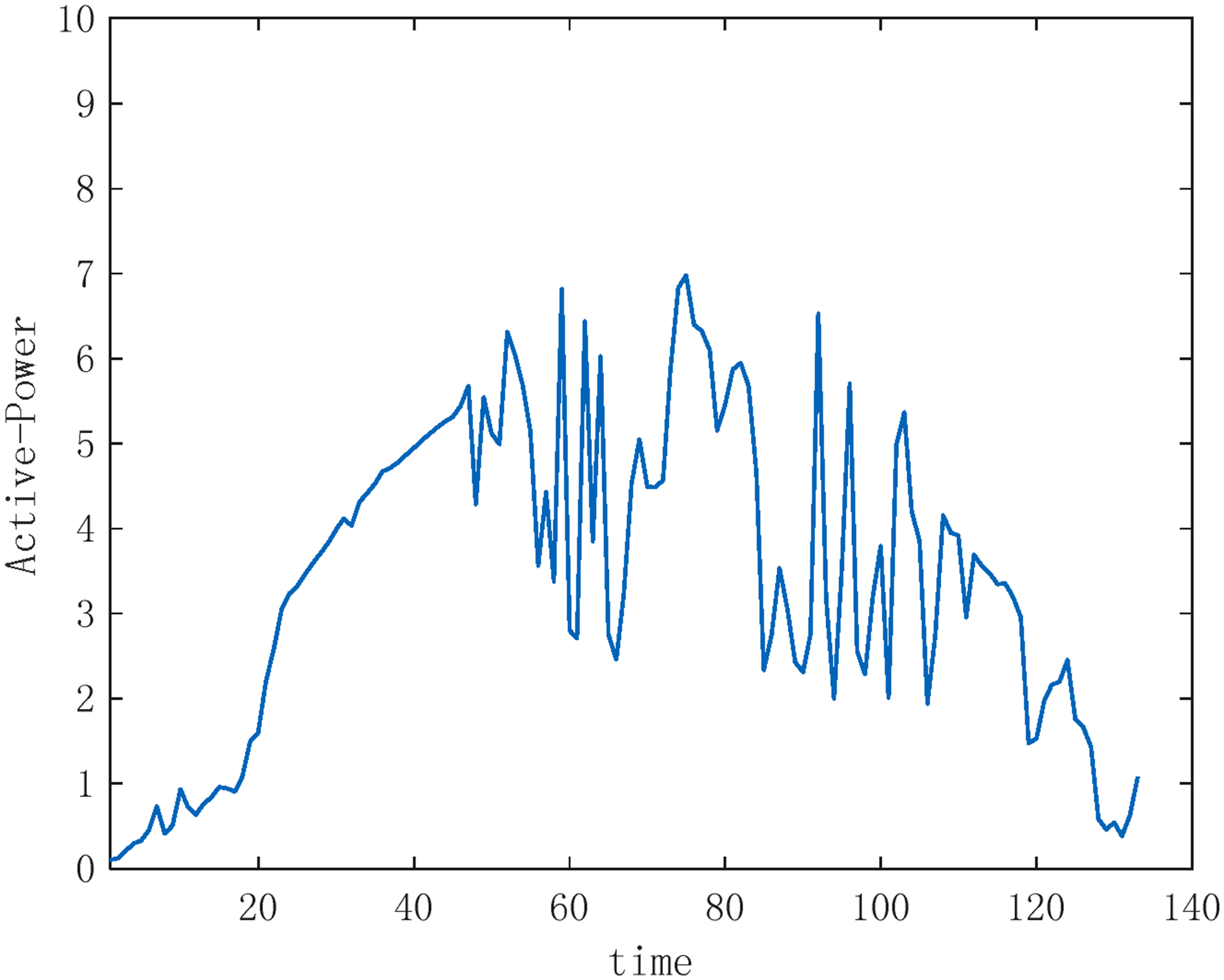
2010/3/127-18Active_Power data.
Before using the fLsm iterative prediction model, it is necessary to determine whether the PV power series is LRD. The values of H and
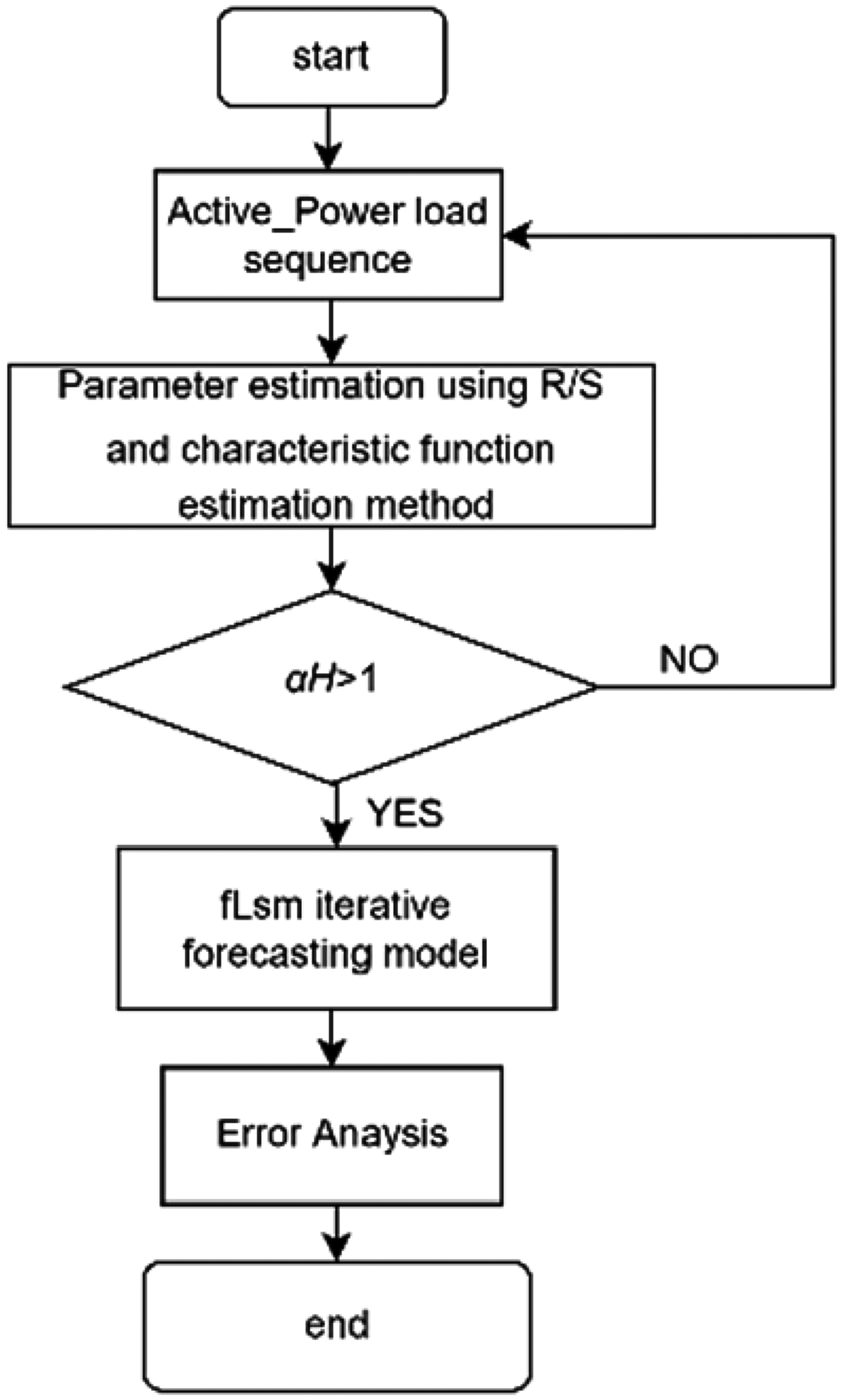
Forecasting process.
Estimated values of prediction model parameters.

Lyapunov maximum prediction range.

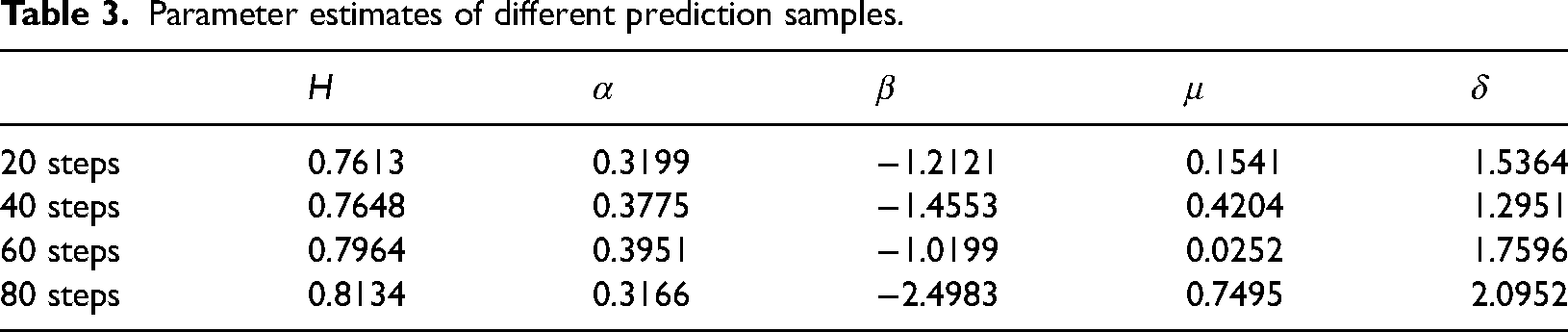
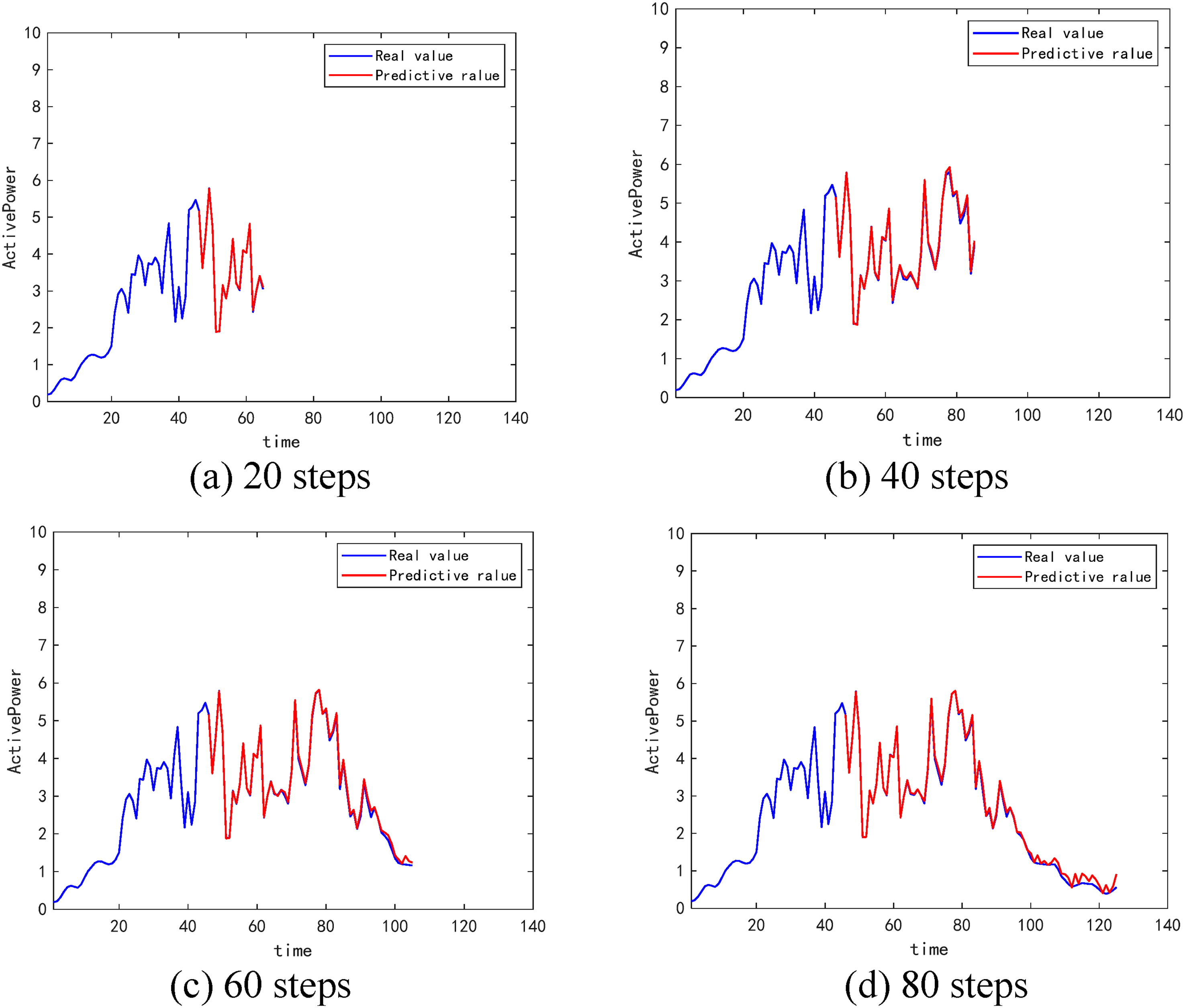
Using the fLsm iterative differential prediction model, the future PV power trends are predicted from 45 steps for 20, 40, 60, and 80 steps, respectively, and the prediction results are shown in Figure 8. The parameter estimates for different prediction samples are shown in Table 3, and the performance analysis of the prediction model is shown in Table 4.
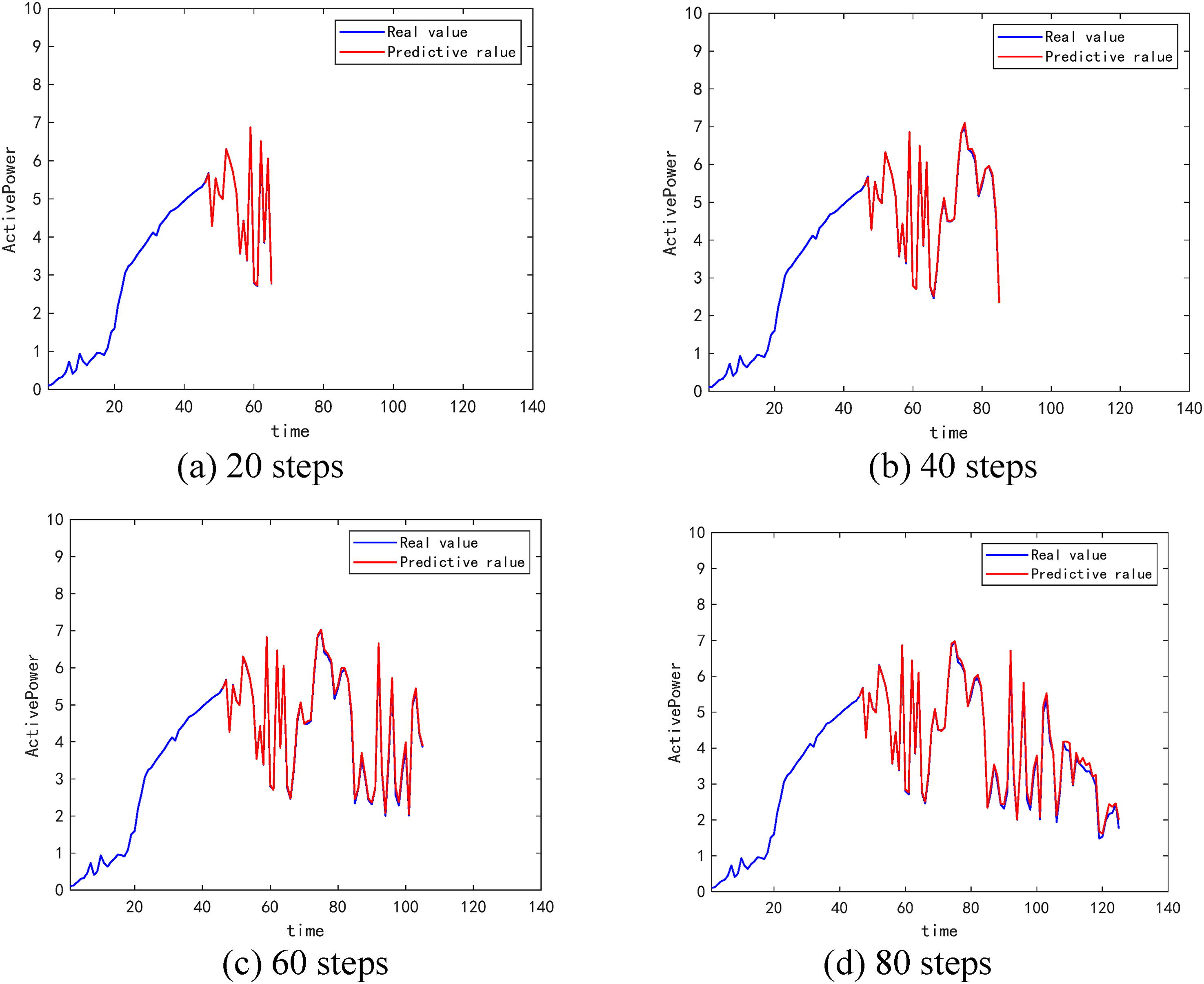
Active_Power predictions.
Parameter estimates of different prediction samples.
Performance analysis of prediction model.
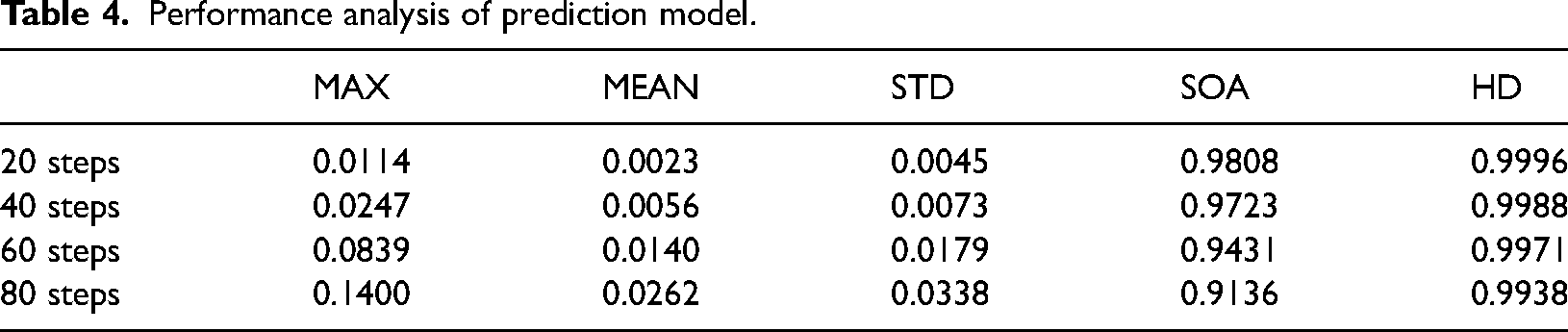
Figure 9 shows the power data from 7:00 to 18:00 on 2016/12/7
2016/12/7 7:00–18:00 Active_Power data.
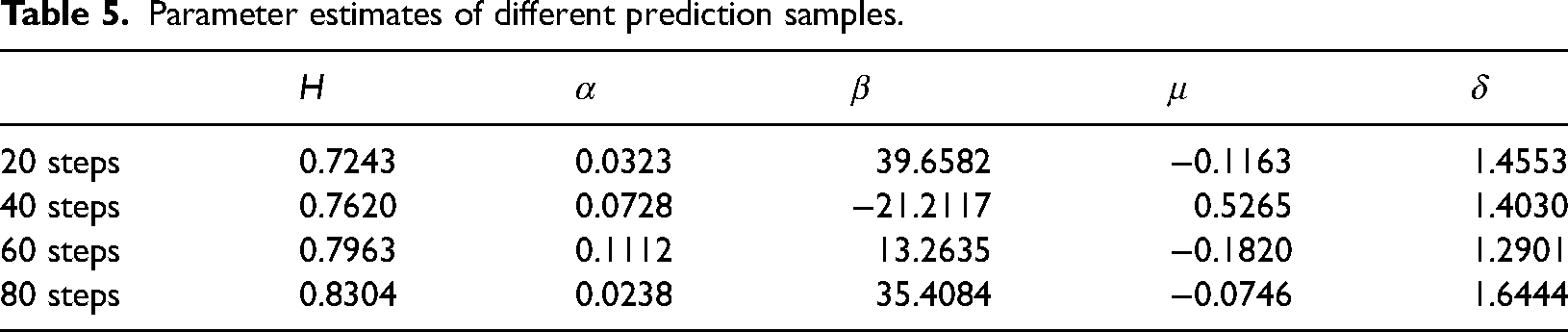
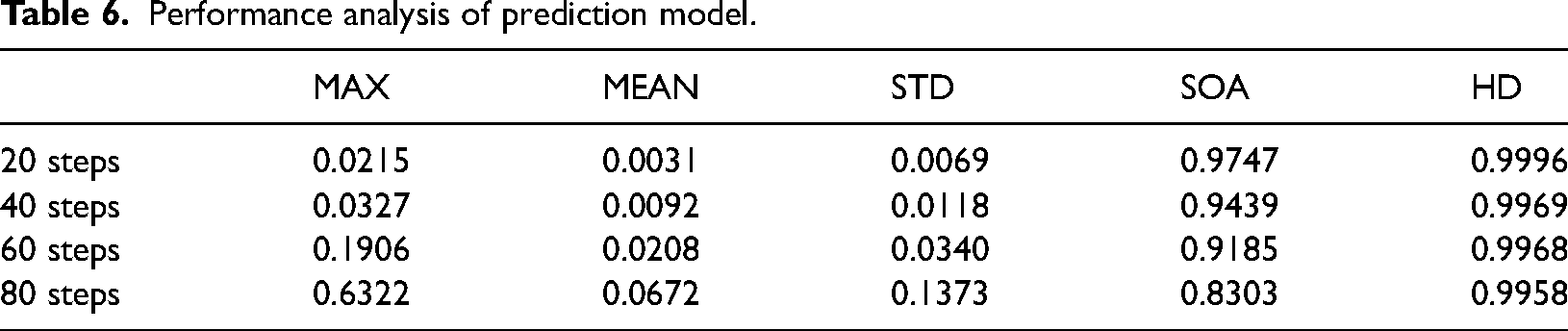
Using the fLsm iterative differential prediction model, the future PV power trends are predicted from 45 steps for 20, 40, 60, and 80 steps, respectively, and the prediction results are shown in Figure 10. The parameter estimates for different prediction samples are shown in Table 5, and the performance analysis of the prediction model is shown in Table 6.
Active_Power predictions.
Parameter estimates of different prediction samples.
Performance analysis of prediction model.
Comparison with different models
1. The power data of 2010/3/12 7:00 to 18:00 was compared with the fLsm iterative prediction models with Conv-LSTM, BiLSTM, and GA-LSTM prediction model by predicting 60 steps, and the prediction results are shown in Figure 11.
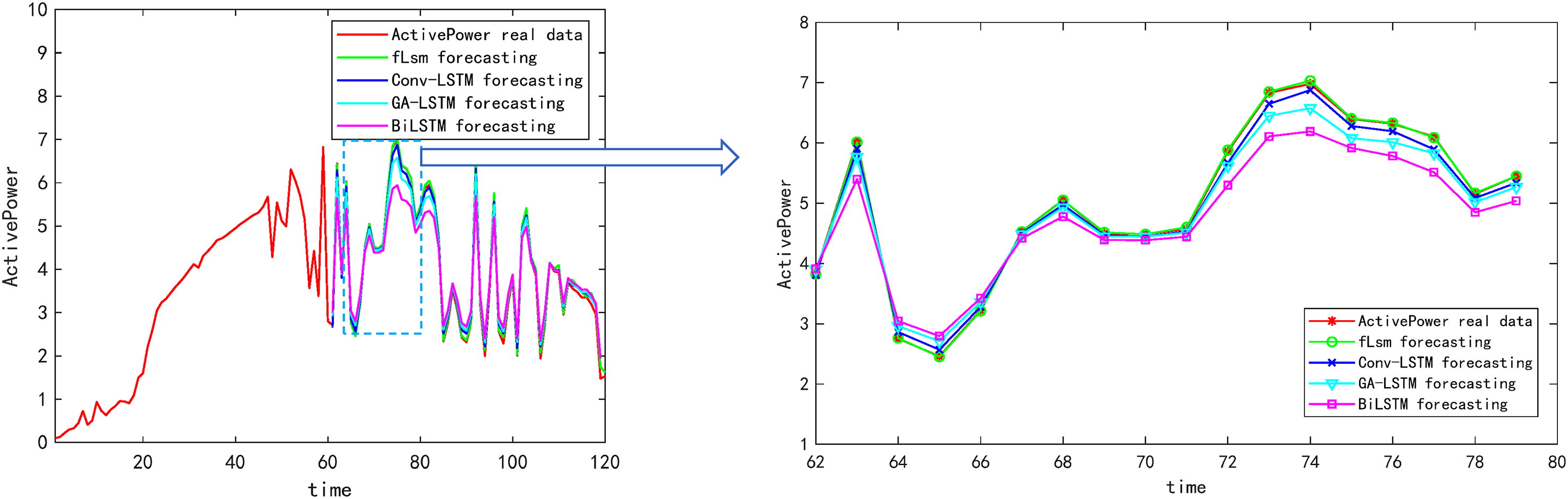
Active_Power predictions with GA-LSTM/BiLSTM / Conv-LSTM /fLsm forecasting. BiLSTM: bidirectional long short-term memory; Conv-LSTM: convolutional long and short-term memory.
The maximum and average percentage errors for the two prediction models are presented in Table 7.
Errors of the three prediction models.

BiLSTM: bidirectional long short-term memory; Conv-LSTM: convolutional long and short-term memory.
2. The fLsm iterative prediction model was compared with the Conv-LSTM, BiLSTM, and GA-LSTM prediction models for the power data from 7:00 to 18:00 on 2016/12/7, and the prediction results are shown in Figure 12. The maximum and average percentage errors of the two prediction models are listed in Table 8.
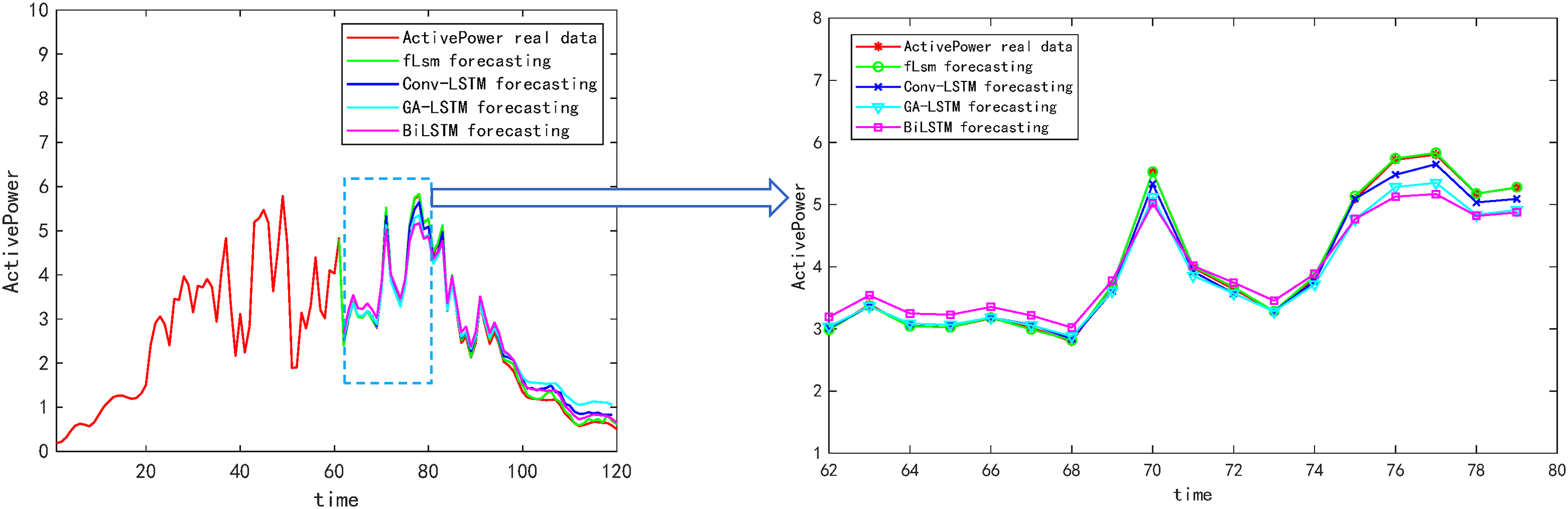
Active_Power predictions with GA-LSTM/BiLSTM / Conv-LSTM /fLsm forecasting.BiLSTM: bidirectional long short-term memory; Conv-LSTM: convolutional long and short-term memory.
Errors of the three prediction models.

BiLSTM: bidirectional long short-term memory; Conv-LSTM: convolutional long and short-term memory.
From Tables 7 and 8 and Figures 11 and 12, fLsm iterative prediction model in this article has high prediction accuracy.
Conclusion
In this article, we propose a finite iterative PV power prediction method using fLsm to establish the power prediction method with LRD characteristics is effective.
The self-similarity and LRD characteristics of the fLsm model are introduced by utilizing the relationship between the self-similarity index and the eigenindex. The parameters of the fLsm model were estimated using a new eigenfunction method. The fLsm iterative PV power prediction model is established by discretizing the fLsm model. When the fLsm model predicts different lengths of PV power with the same length of PV power series, the predictive performance and predictive accuracy of the model gradually become worse with the increase of the prediction length. When the PV power series of different lengths predict the PV power of the same length, the predictive performance and predictive accuracy of the model gradually become higher with the increase of the prediction length. The maximum predictable time scale of PV power is calculated based on the maximum Lyapunov exponent, which was able to accurately predict the PV power in the future period. When the PV power is integrated into the grid, once the PV power abnormality is predicted, the grid scheduling department can be notified in advance to ensure the safe and stable operation of the grid system. Through the experiments of establishing fLsm model and Conv-LSTM, BiLSTM,GA-LSTM prediction models, combined with the prediction simulation diagram and prediction error, the superiority of the fLsm model proposed in this paper to predict the PV power is verified, which provides a new method and idea for the PV power prediction.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science and Technology Project of Fujian Province, Science and Technology Project of Quanzhou City, Joint Open-ended Foundation of State Key Laboratory of Integrated Automation in Process Industry of Northeastern University (grant number 2023H6026, 2022N041, 2022-KF-21-02).