
Abstract
Wind energy has been developed and is widely used as a clean and renewable form of energy. Among the existing variety of wind turbines, variable-speed variable-pitch wind turbines have become popular owing to their variable output power capability. In this study, a hybrid control strategy is proposed to implement pitch angle control. A new nonlinear hybrid control approach based on the Adaptive Neuro-Fuzzy Inference System and fuzzy logic control is proposed to regulate the pitch angle and maintain the captured mechanical energy at the rated value. In the controller, the reference value of the pitch angle is predicted by the Adaptive Neuro-Fuzzy Inference System according to the wind speed and the blade tip speed ratio. A proposed fuzzy logic controller provides feedback based on the captured power to modify the pitch angle in real time. The effectiveness of the proposed hybrid pitch angle control method was verified on a 5 MW offshore wind turbine under two different wind conditions using MATLAB/Simulink. The simulation results showed that fluctuations in rotor speed were dramatically mitigated, and the captured mechanical power was always near the rated value as compared with the performance when using the Adaptive Neuro-Fuzzy Inference System alone. The variation rate of power was 0.18% when the proposed controller was employed, whereas it was 2.93% when only an Adaptive Neuro-Fuzzy Inference System was used.
Keywords
Introduction
Over the past decades, wind energy has become a popular clean and renewable form of energy (GWEC, 2021; Tian et al., 2021). With wind turbine technology maturing and with increasing electricity demand, variable-speed variable-pitch wind turbines have attracted attention owing to their variable output power capability (Roy, 2014). The source of a wind turbine is wind, which changes frequently in nature. As a result, the turbine's output power fluctuates according to variations in wind speed (Ochoa and Martinez, 2018). When the wind speed is above the cutin speed and below the rated value of the wind turbine, the wind turbine is controlled to capture the maximum wind energy. When the wind speed is higher than the rated value but lower than the cutout value, the rated power is maintained by an applied pitch controller to ensure the safety of wind turbine components. Various control strategies have been used for pitch angle control to keep the wind turbine operating at a rated power (Ebrahim et al., 2018; Navarrete et al., 2019). The conventional control method uses proportional-integral (PI) control based on the error between the rated power and the actual value (Fan et al., 2016; Hwas and Katebi, 2012; Pao and Johnson, 2009). However, a wind turbine pitch control system is strongly nonlinear, so a PI linear control approach cannot satisfy the pitch control requirements (Hosseini and Shahgholian, 2017).
Recently, various intelligent control strategies have been applied to control the pitch angle, which can be automated through the emulation of biological intelligence (Colombo et al., 2020; Dahbi et al., 2016; Ghasemi et al., 2016; Oğuz and Güney, 2010). As a type of intelligent technique, a fuzzy logic controller can translate logic statements into a nonlinear mapping and regulate higher-order nonlinear systems (Divandari and Rezaie, 2016; Han et al., 2016). Some researchers have verified the effectiveness of fuzzy controllers as pitch angle controllers (Civelek, 2020). Abdelbaky et al. (2020) proposed a partial offline fuzzy pitch controller to guarantee the stability of the output power when the wind speed is above the rated value of a turbine. Their research demonstrated that the proposed control strategy achieved better performance than a PI controller. Lasheen and Elshafei (2016) designed a fuzzy predictive algorithm for pitch control and employed a gap-metric criterion in the fuzzy model to reduce the rule base. The proposed control strategy could significantly enhance the power harvesting capability and reduce the mechanical load compared with either a PI controller or an H2/H∞mixed controller. Asgharnia et al. (2018) employed optimal fuzzy proportional integral derivative (PID) and optimal fractional-order fuzzy PID controllers to control the pitch angle of a wind turbine, and the superior performance of the optimal controller was validated on a 5 MW wind turbine. However, a pitch angle controller requires a fast compatible response for unexpected changes in wind speed. As a universal estimator, the Adaptive Neuro-Fuzzy Inference System (ANFIS), which incorporates both an artificial neural network (ANN) and a fuzzy logic controller, is superior to controllers that adopt a single control technique (Varghese and Reji, 2019; Zamen et al., 2019). ANFIS can automatically generate fuzzy if-then rules and optimize turbine parameters via the learning capability of an ANN, and has been primarily used to predict the power coefficient of a wind turbine and to estimate the wind speed (Fan and Mu, 2020; Marugan et al., 2018). Asghar and Liu (2018) estimated the wind speed using the ANFIS controller and improved the reliability of wind speed estimation. Khosravi et al. (2018) optimized an ANFIS controller with a particle swarm optimization algorithm, and the predicted speed was in excellent agreement with actual wind speed values. Dalibor et al. (2014) designed an ANFIS controller to adjust the continuous variable transmission ratio in order to maintain the maximum output power of a wind turbine. Sarkar et al. (2019) implemented an ANFIS approach to predict the power coefficient of wind turbine blades. Their results demonstrated that the predicted values were very close to the objective values.
In this study, a hybrid control strategy is proposed to implement pitch angle control when the wind turbine operates in the third region. First, an ANFIS controller is employed to estimate the pitch angle based on the input wind speed and rotor tip speed ratio. Then, a fuzzy logic controller is adopted to compensate for the nonlinear relationship between pitch angle and wind speed, in which the output power error and its derivative were chosen as the input variables. Finally, the proposed controller is verified through simulations on a 5 MW wind turbine.
Model of hydraulic wind turbine system
The major components of an offshore hydraulic wind turbine system include a wind turbine, hydraulic transmission system, and generator. In this study, a variable displacement pump is connected to the wind turbine rotor, through which the captured wind energy is converted into hydraulic energy. Finally, the energy is transformed into electrical energy using an induction generator coupled to a Pelton turbine. In the hydraulic transmission system, a pressurization system was employed to support pumping seawater into the nacelle (Buhagiar et al., 2015), and an accumulator was used to smooth the output power. The structure of the hydraulic wind turbine is shown in Figure 1. The kinetic energy P extracted from the wind turbine blades can be calculated as follows:


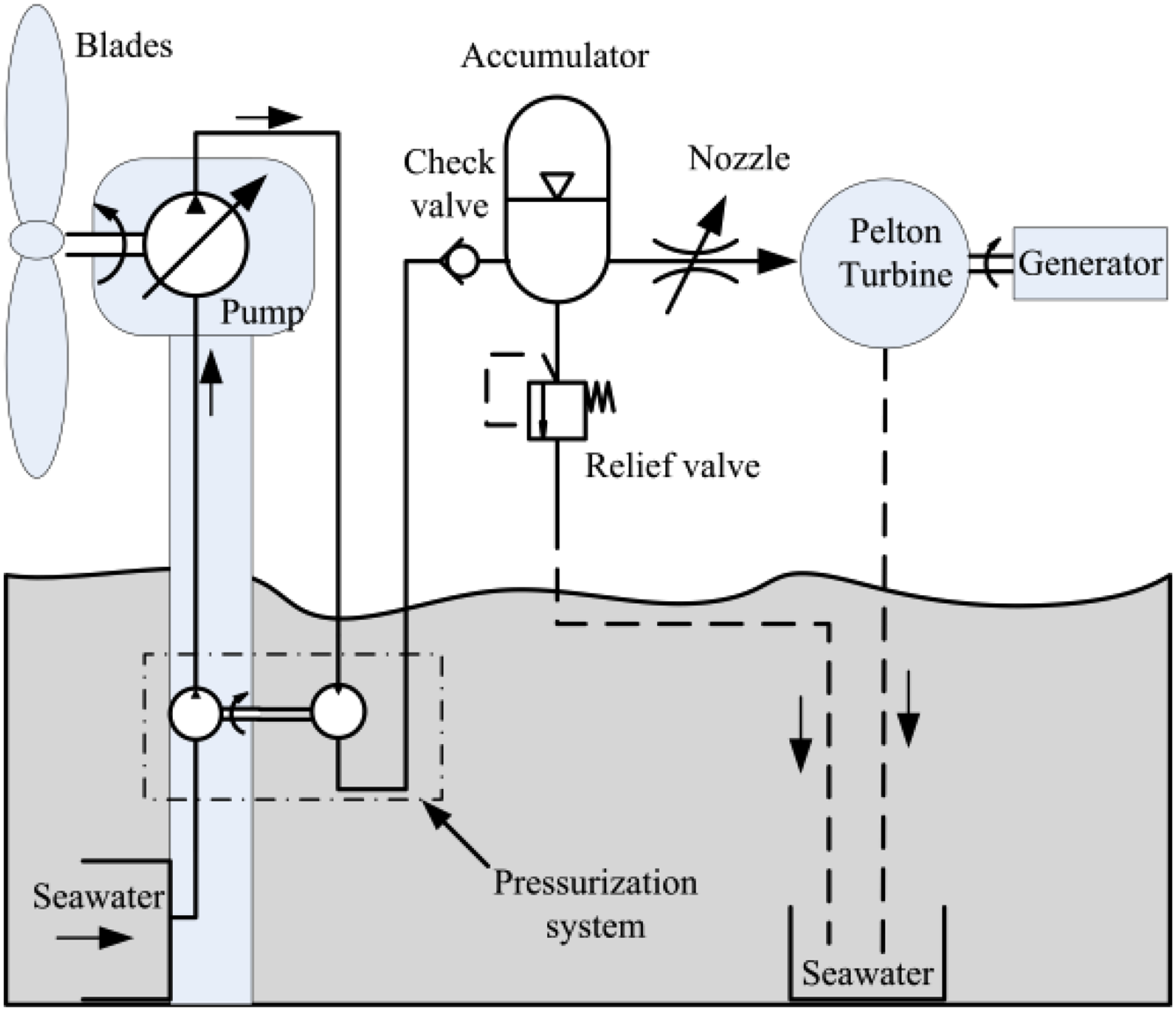
Schematic of the hydraulic wind turbine system evaluated in this study.
The power coefficient


The differential equation between the Pelton turbine and the generator is given as

Method
Hybrid pitch angle controller based on ANFIS and fuzzy logic control
In this study, the control objective was to change the pitch angle of the wind turbine and ensure the safety of the generator device when the wind speed was higher than the rated value. The value of pitch angle should be increased to maintain the captured power at a constant value. The accuracy of the pitch angle is crucial for a variable-speed wind turbine. Because the relationship between the captured power and pitch angle is nonlinear, an intelligent controller is the most appropriate method to provide safe control. In this study, we propose a novel hybrid controller that includes a feedback loop. Figure 2 shows a block diagram of the proposed hybrid pitch angle controller. First, the reference value of the pitch angle is predicted by an ANFIS, in which the wind speed and blade tip speed ratio are the inputs. Then, a fuzzy logic controller was designed to adjust the estimated value of the pitch angle based on the input wind speed, and the power deviation from the desired value and its variation.
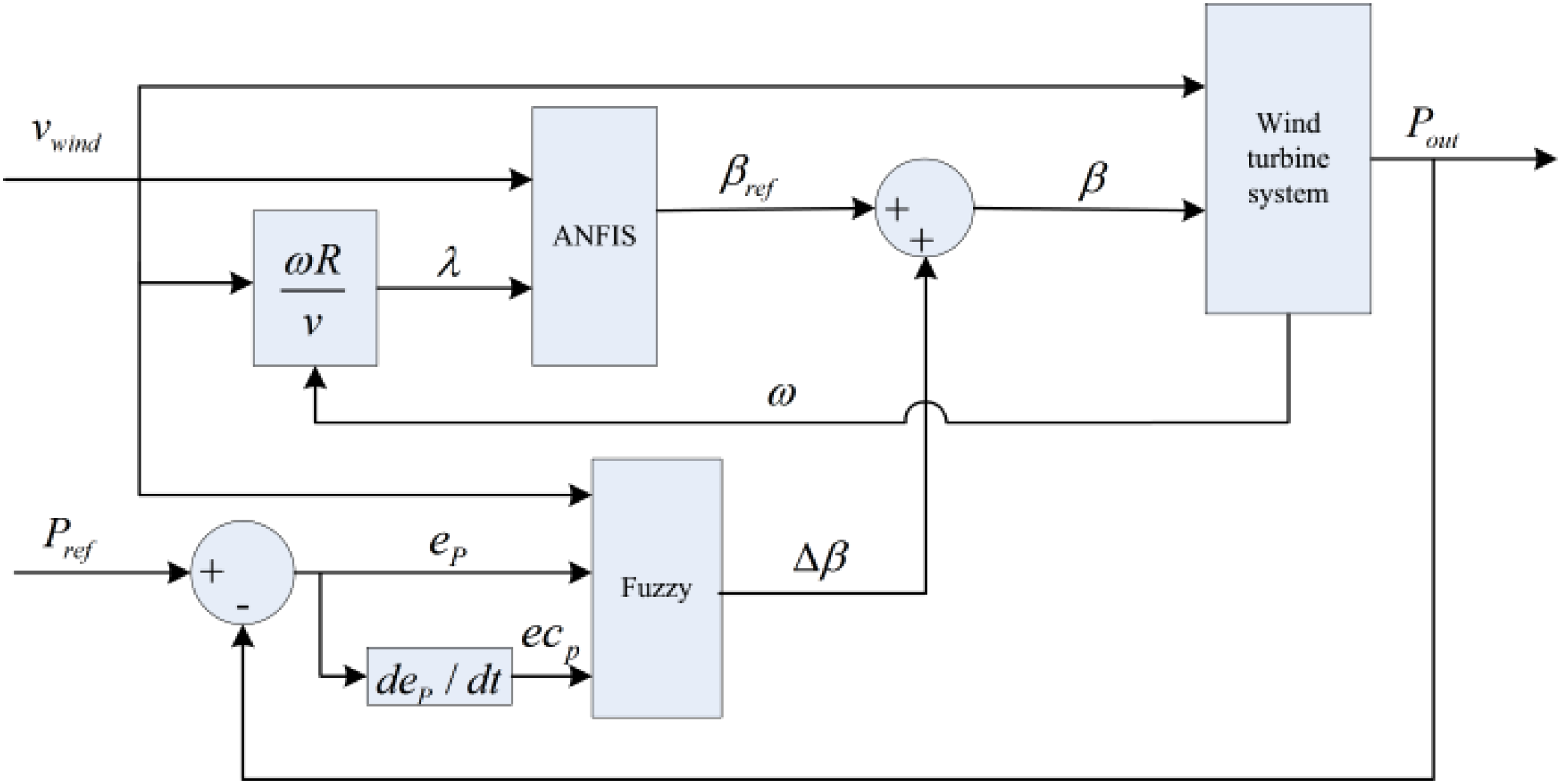
Block diagram of the proposed hybrid pitch angle controller.
Design of ANFIS
The ANFIS controller is a hybrid intelligent ANN and Takagi-Sugeno (T-S) fuzzy inference system that can estimate nonlinear relationships between input and output data by using fuzzy inference and can update the parameters of the T-S inference model by employing an ANN. The structure of the ANFIS used in this study is shown in Figure 3, in which the parameters wind speed v and the tip speed ratio

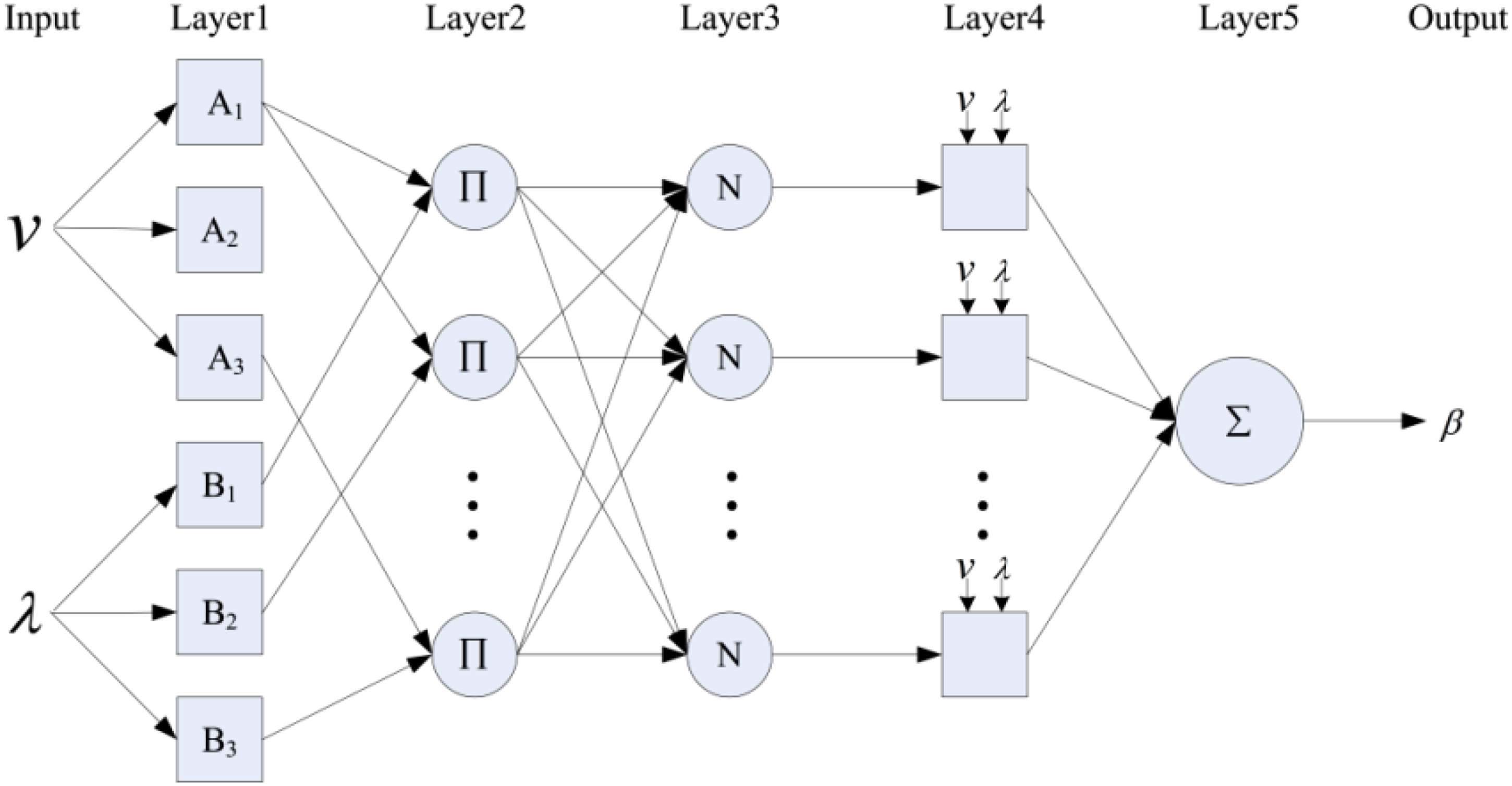
Adaptive Neuro-Fuzzy Inference System (ANFIS) structure.
The second layer is the rule layer, and in this layer, the firing strength with respect to each rule is calculated by the following equation.



The final layer is the sum layer, which computes the network output. There is one node in this layer, whose output is computed using the following equation.

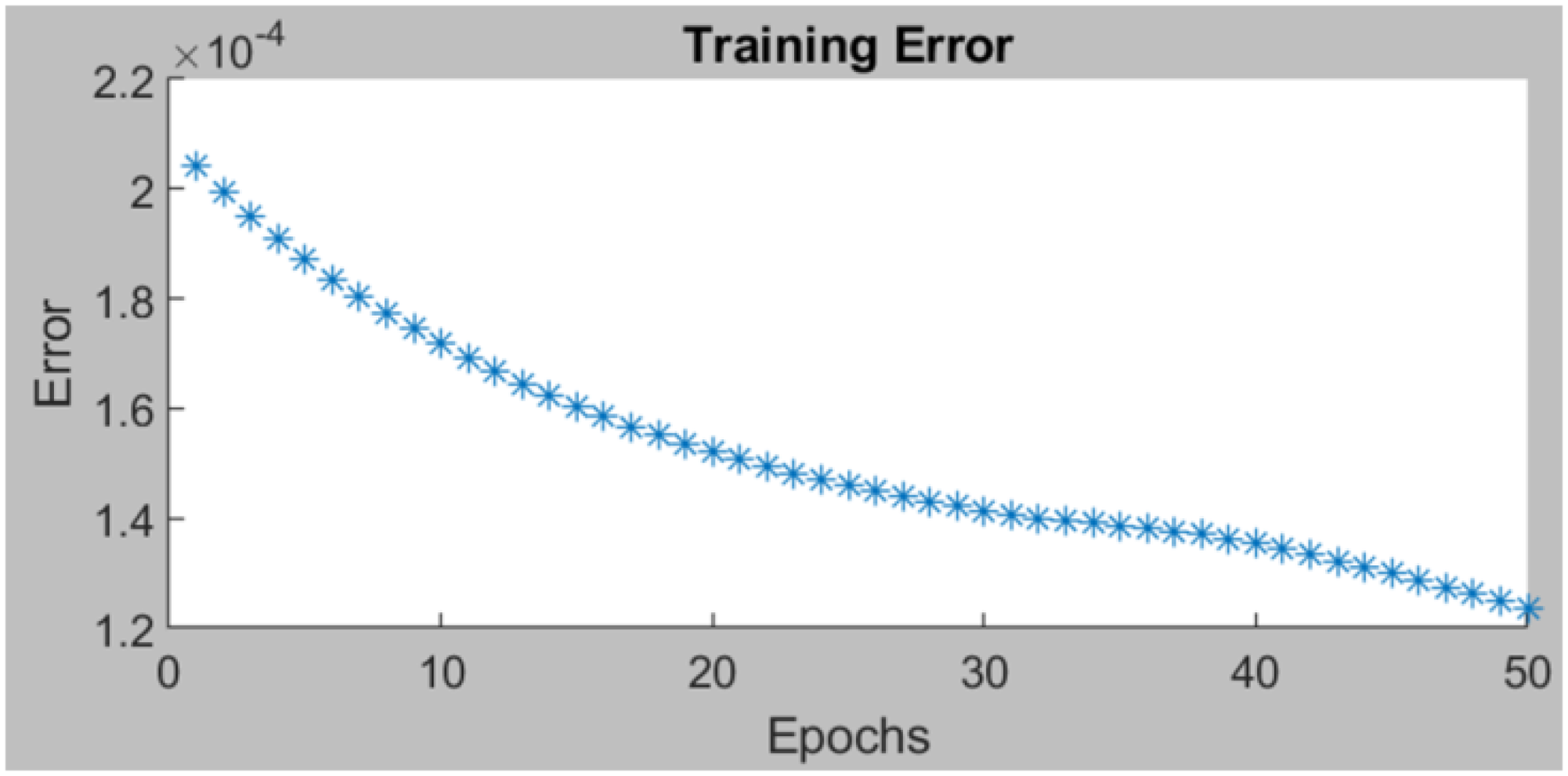
Adaptive Neuro-Fuzzy Inference System (ANFIS) training error.
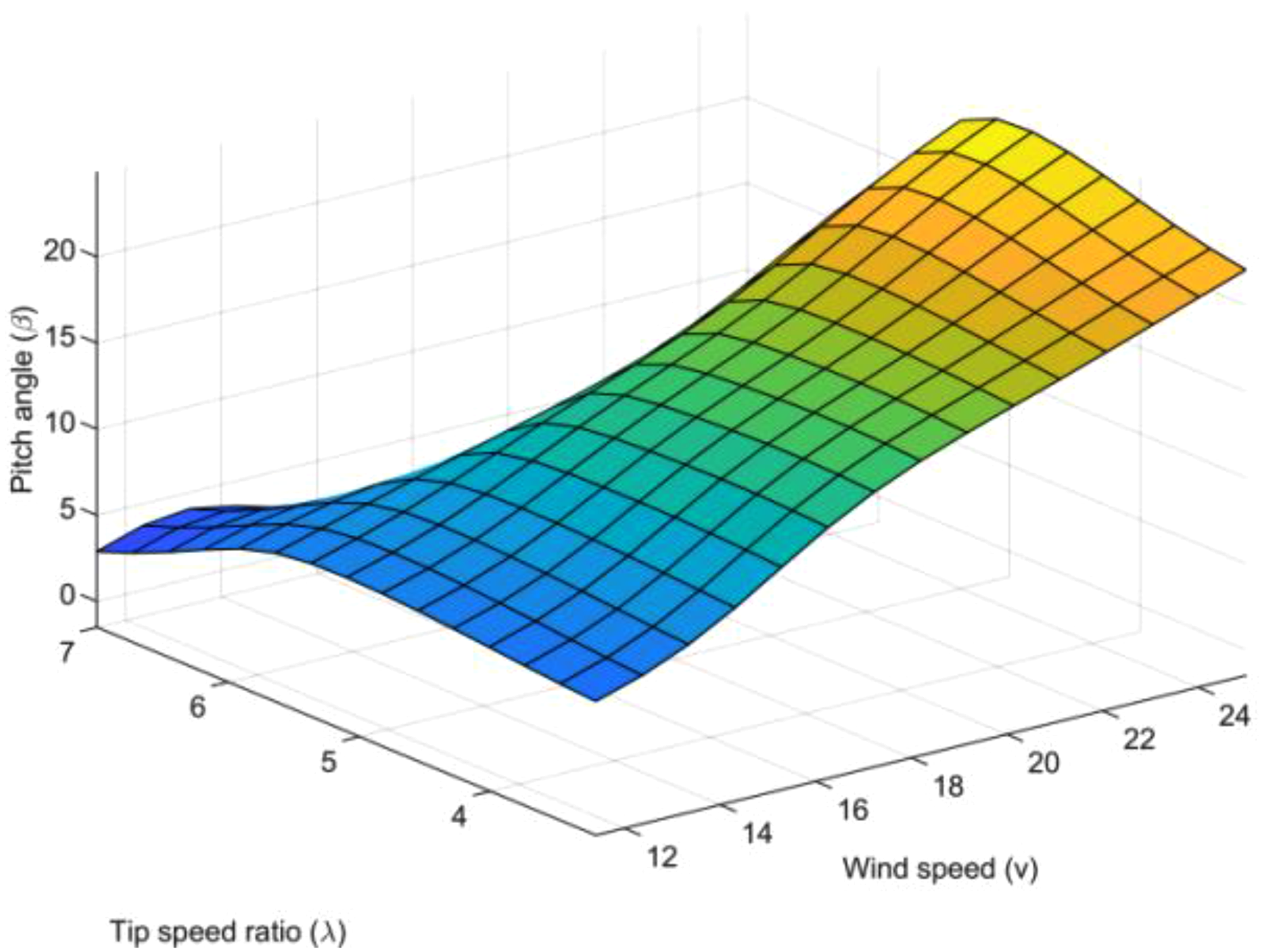
Final three-dimensional predicted surface for the pitch angle.
Design of fuzzy logic controller to complement ANFIS
A fuzzy logic controller is an adaptive nonlinear control system that can adjust the pitch angle and does not require a concrete mathematical model of the wind turbine. In this study, the output power error and its derivative were chosen as the input variables, and both were transformed into a uniform fuzzy range of (−1, 1). To compensate for the nonlinear relationship between the pitch angle and wind speed, the wind speed was employed as the third input variable, which was limited to the (11.4, 25) interval. The Gaussian shape membership function was chosen for the wind speed, and the triangular membership function was used for the power error and its derivative. The corresponding fuzzy subsets are expressed as
where NL, NS, ZO, PS, and PL represent negative large, negative small, zero, positive small, and positive large, respectively. The input MFs are shown in Figure 6(a) and (b).
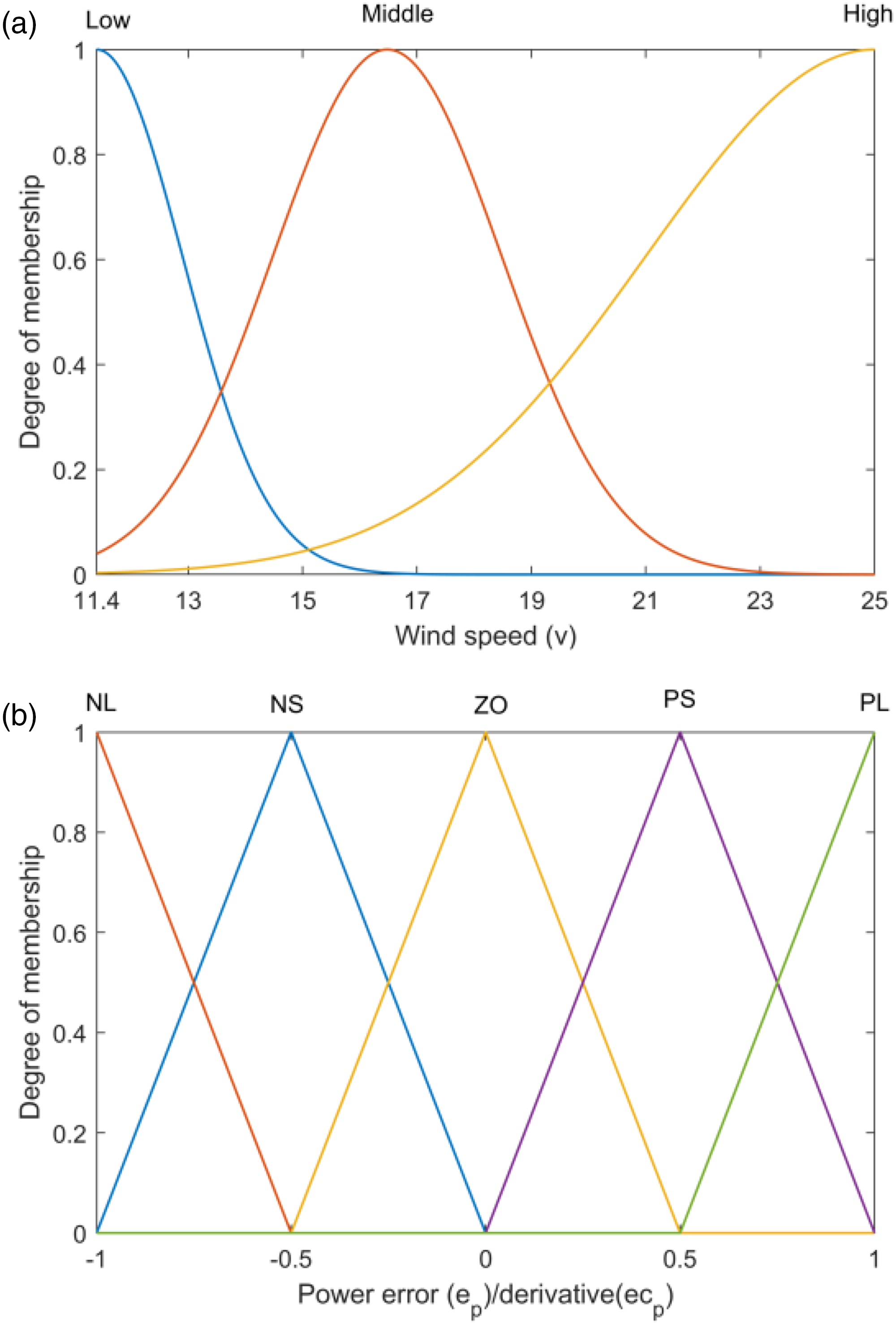
Input membership functions.
The pitch angle change was considered as the controller output, and the triangular membership function was used for the fuzzy system. The output variable was limited to the (−0.5, 0.5) interval. The corresponding fuzzy subset is given as
where NML, NM, NMS, PMS, PM, and PML represent negative medium large, negative medium, negative medium small, positive medium small, positive medium, and positive medium large, respectively. The output MFs are shown in Figure 7.
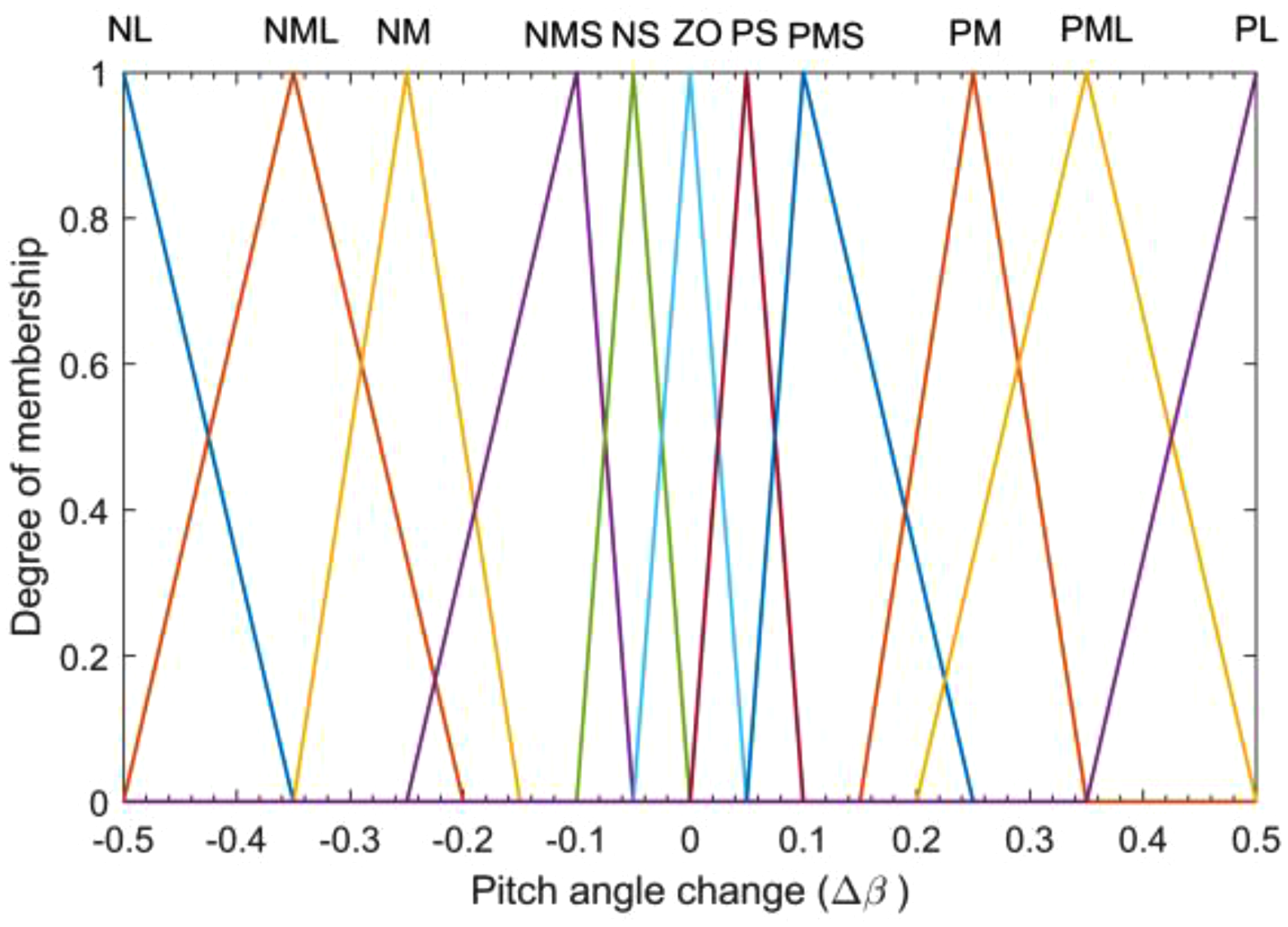
Output membership functions.
When the wind speed is low, the sensitivity of the pitch angle to wind speed is lower, so a larger
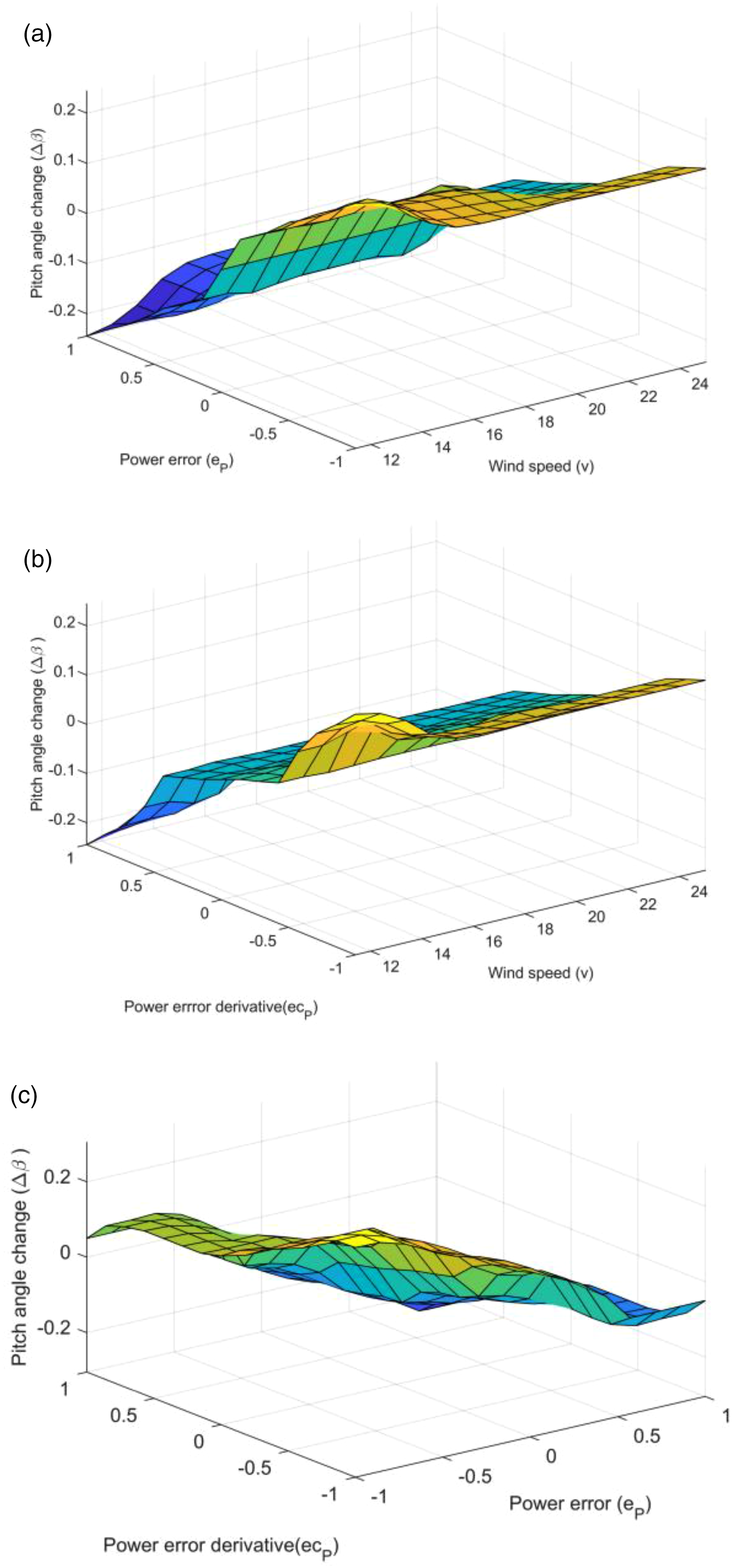
Three-dimensional surface of predicted pitch angle change.
Fuzzy inference rules were obtained for the designed fuzzy controller.
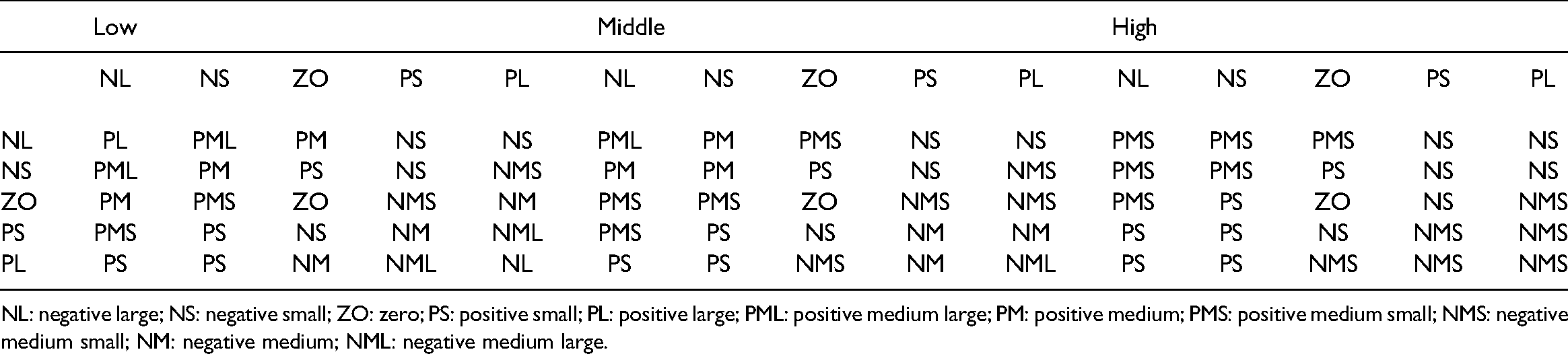
NL: negative large; NS: negative small; ZO: zero; PS: positive small; PL: positive large; PML: positive medium large; PM: positive medium; PMS: positive medium small; NMS: negative medium small; NM: negative medium; NML: negative medium large.
Simulations and discussions
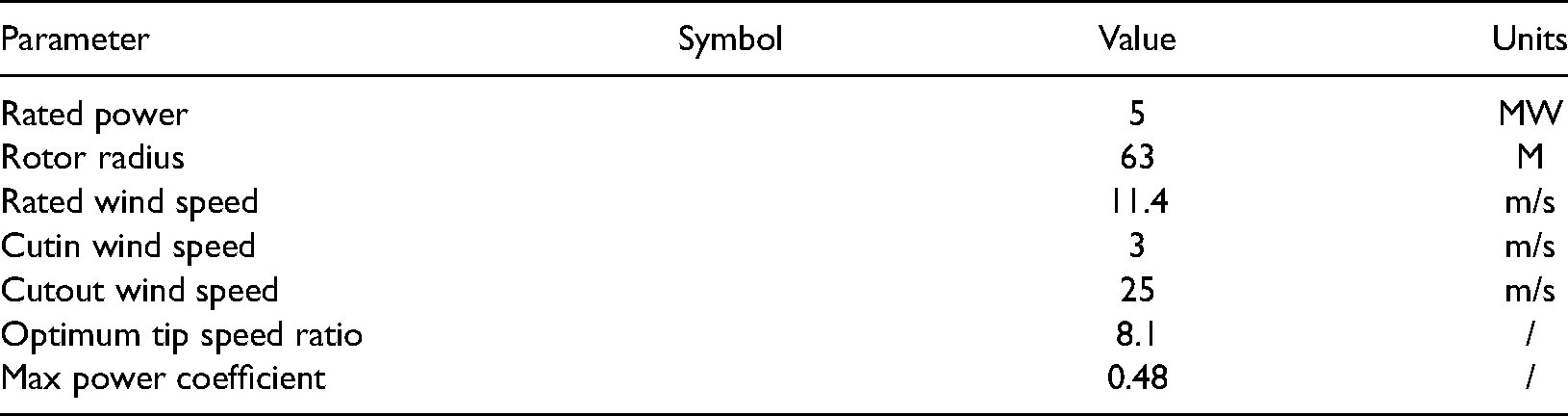
Simulations were carried out based on a 5 MW offshore wind turbine (Jonkman et al., 2009) to validate the effectiveness of the proposed hybrid controller under two different wind conditions. The parameters of the wind turbine are listed in Table 2, and the control performances are shown in Figures 9 and 10, respectively.
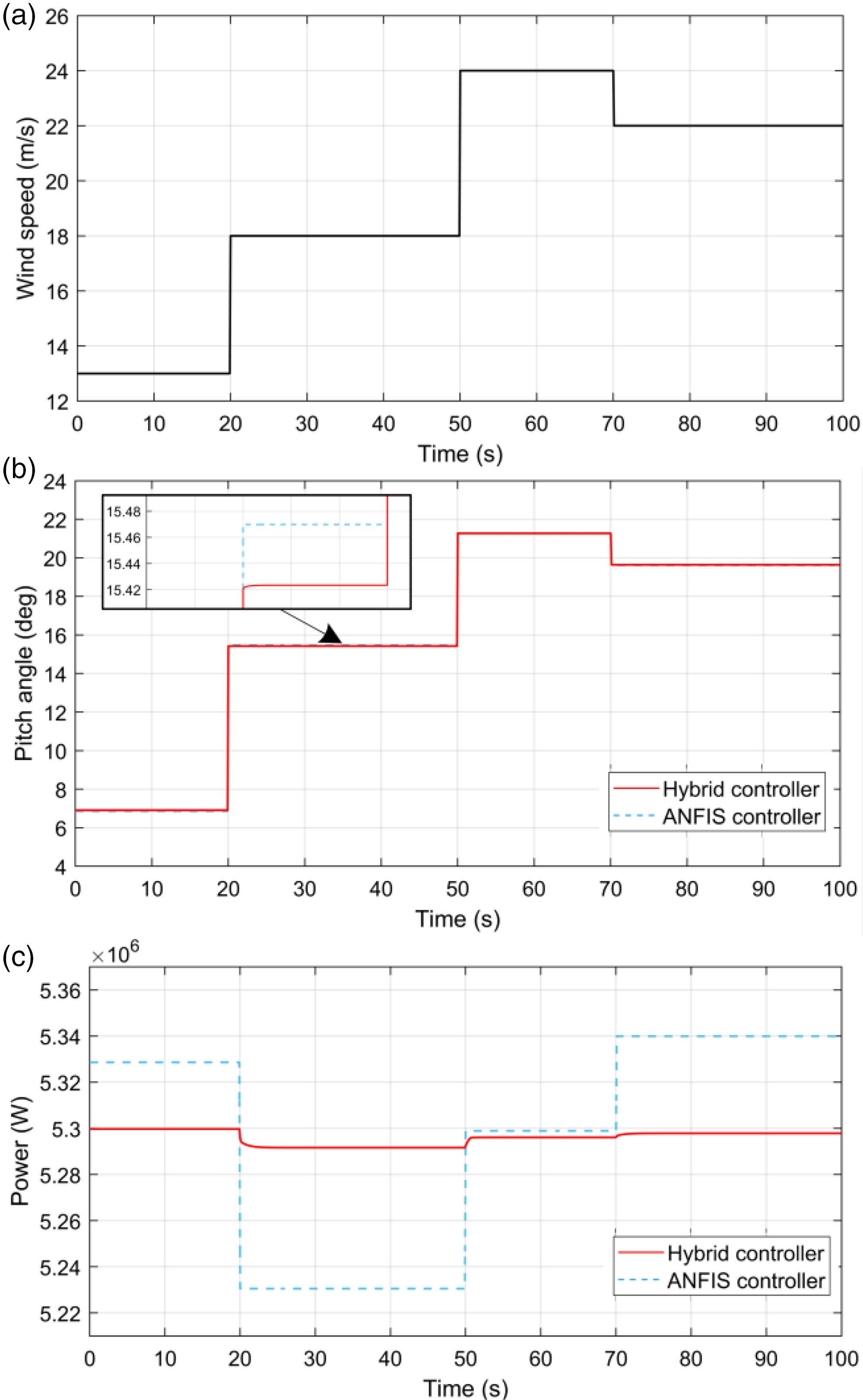
Transient performance simulations for a wind speed with step changes.
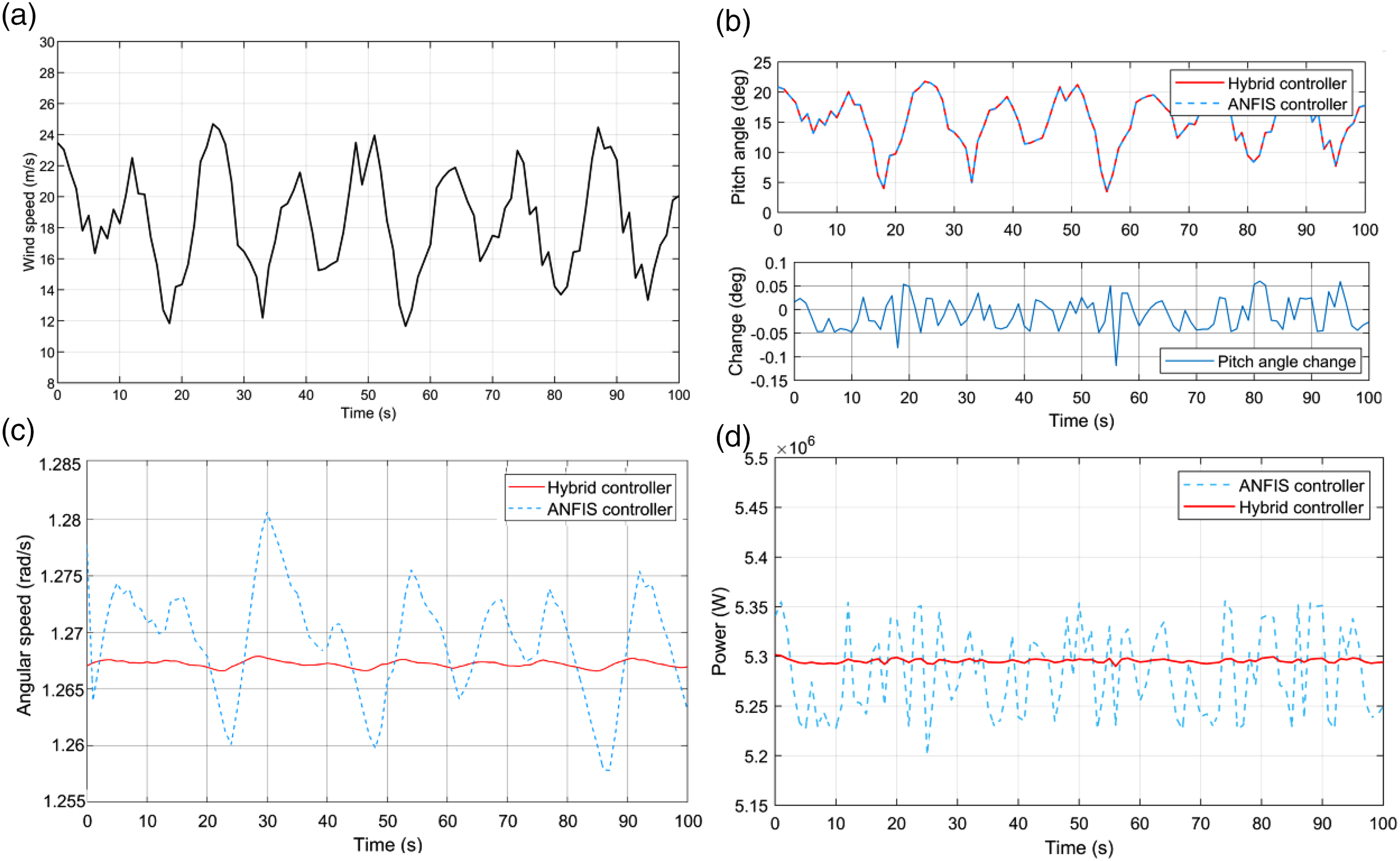
Simulation results for random wind speed changes.
Main parameters of the wind turbine evaluated in the simulations (Jonkman et al., 2009).
In Figure 9, the transient performance of the pitch controllers is investigated. Figure 9(a) shows the results for the wind speed involving three step changes over the 11.4 m/s to 25 m/s range. In Figure 9(b), there are few differences in the change curve of the pitch angle between the ANFIS-only and hybrid controllers under the stepped wind speed. In Figure 9(c), the captured mechanical power is always close to the rated value (5.2966 MW) because of the pitch angle amendment implemented by the hybrid controller. The power control performance of the hybrid controller is better than that when ANFIS alone is used because a larger deviation occurs when only ANFIS is adopted.
In Figure 10, a random wind that varied between 11.4 m/s and 25 m/s was used to investigate and compare the hybrid system performance to the ANFIS-only performance. The change curve of the wind turbine is shown in Figure 10(a). In Figure 10(b), the changes in pitch angle under the two controllers are consistent with the wind speed, which verifies that the two controllers can effectively predict the pitch angle according to the input wind speed. For the hybrid controller, a feedback loop was designed to compensate for the nonlinear sensitivity of the pitch angle to the output power; therefore, the pitch angle change is estimated by the output power error, its derivative, and the input wind speed. As shown in Figure 10(c), the rotor speed always converges to the rated value (1.2671 rad/s) when the hybrid controller is used, while the rotor speed oscillates near the rated value when the pitch angle is controlled using only the ANFIS controller. The angular speed change ranges were 1.2666–1.2678 rad/s for the hybrid controller and 1.2578–1.2806 rad/s for the ANFIS-only controller. Figure 10(d) indicates that the hybrid controller can ensure that the captured mechanical power is near the rated value (5.2966 MW), where the value changes between 5.2899 MW and 5.2994 MW. However, when only the ANFIS controller is used, the power changes between 5.2006 MW and 5.3558 MW. The variation rates of power between the two control schemes were 0.18% and 2.93%, respectively. The simulation results indicate that the control performance of the hybrid controller was significantly better than that when only ANFIS or fuzzy logic controller (Civelek, 2020) was used.
Conclusion
In this study, to stabilize the captured mechanical power and mitigate the fatigue load, a novel pitch controller for a variable-speed variable-pitch wind turbine was proposed. In the proposed control system, the pitch angle was estimated using an ANFIS approach based on the wind speed and blade tip speed ratio. A feedback loop was then added to track the captured mechanical power and constantly adjust the pitch angle. Results using ANFIS alone were compared with the results using the proposed hybrid controller. The simulation results demonstrated that the control performance of the hybrid controller is better than that of the ANFIS-only controller, and can dramatically mitigate fluctuations in rotor speed and can maintain the mechanical power of the wind turbine under variable wind conditions. This control mechanism will provide safer and more stable operation of wind turbines, thus prolonging their lifetime and reducing maintenance and repair costs.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded by Scientific Research Plan Project of Shaanxi Education Department (17JK0365), Natural Science Foundation of Shaanxi Province (2018JM5166), International Science and Technology Cooperation and Exchange Program of Shaanxi Province (2020KW-014) and Key Laboratory Scientific Research Project of Shaanxi Education Department (19JS037).