
Abstract
Ensemble Kalman filter (EnKF) has been widely studied due to its excellent recursive data processing, dependable uncertainty quantification, and real-time update. However, many previous works have shown poor characterization results on channel reservoirs with non-Gaussian permeability distribution, which do not satisfy the Gaussian assumption of EnKF algorithm. To meet the assumption, normal score transformation can be applied to ensemble parameters. Even though this preserves initial permeability distribution of ensembles, it cannot provide reliable results when initial reservoir models are quite different from the reference one. In this study, an ensemble-based history matching scheme is suggested for channel reservoirs using EnKF with continuous update of channel information. We define channel information which consists of the facies ratio and the mean permeability of each rock face. These are added to the ensemble state vector of EnKF and updated recursively with other model parameters. Using the updated channel information, ensemble parameters are retransformed after each assimilation step. The proposed method gives better characterization results in case of using even poorly designed initial ensemble members. The method also alleviates overshooting problem of EnKF without further modifications of EnKF algorithm. The methodology is applied to channel reservoirs with extreme non-Gaussian permeability distribution. The result shows that the updated models can find channel pattern successfully and the uncertainty range is decreased properly to make a reasonable decision. Although initial channel information of the ensemble members shows big difference with the real one, it can be updated to follow the reference.
Keywords
Introduction
When developing oil and gas fields, reservoir characterization is crucial for estimating reserves and deciding proper future production plans. By using only static data, initial reservoir models have high uncertainty and give rather inaccurate results for production prediction. Therefore, in order to make a reliable reservoir model, dynamic data such as production data should be fully utilized in reservoir characterization. We call this procedure dynamic data integration or history matching. A number of history matching methods have been proposed.
Ensemble Kalman filter (EnKF), which is proposed by Evensen in 1994, is one of the most popular history matching methods. It uses recursive data handling steps based on stochastic approach with equi-probable many models, known as ensembles. Advantages of EnKF are sound theoretical background and easy coupling with any commercial simulator. Moreover, it can assess uncertainty and update model parameters in real time. Nævdal et al. (2002) demonstrated that EnKF can be applied successfully in reservoir monitoring and give good performances in predicting future production. From then on, it has been actively utilized to reservoir charaterizations.
However, history matching poses many challenges for oil and gas reservoirs with complex geological structure such as channel reservoirs. The algorithm fails to preserve key channel characteristics such as connectivity and continuity and results in unrealistic posterior models. This results from the factor that they are not satisfied with Gaussian distribution of model parameter (Lorentzen et al., 2012; Shin et al., 2010). Instead of Gaussian distribution, they are likely to follow a bimodal distribution. There have been many researches for channel fields to conserve channel characteristic and reduce overshooting.
Jafarpour and McLaughlin (2007) introduced discrete cosine transformation (DCT) as a robust parametrization alternative, which can capture the most important feature of the field. The merits of DCT are not needed for statistical variables and reduction of unnecessary redundancy to make the inverse problem well-posed. Moreover, by combined EnKF with DCT, they demonstrated that their proposed method can preserve geological continuity, which gives better prediction of future performance (Jafarpour and McLaughlin, 2008, 2009; Kim et al., 2016). EnKF with DCT is good to find overall pattern of a channel, but it cannot figure out channel details and shows overshooting.
Shin et al. (2010) studied EnKF using non-parametric approach to characterize reservoir models with a strong non-Gaussian distribution. They utilized normal score transformation (NST) to meet the Gaussian assumption of EnKF scheme and showed successful characterization results. Zhou et al. (2012a, 2012b) applied normal-score EnKF (NS-EnKF) to characterize a channel aquifer model. This shows good performances in preserving channel pattern, but it has to assume known values of the mean permeability and the facies ratio. However, this assumption is unrealistic in practical cases.
Lee et al. (2013a, 2013b) suggested K-mean clustering based on Hausdoff distance to reduce overshooting by grouping similar initial ensemble members. Although EnKF with the clustered covariance gives better history matching and future production prediction than conventional EnKF does, it cannot fully identify the channel trend of the reference and has difficulty in defining a general distance function. Le et al. (2015) proposed ensemble smoother with multiple data assimilation to characterize channel field with posterior model parameter process. For every step of data update, assimilated data are classified according to the facies and changed to fit the original distribution. Even though it can find geometry of a channel, information about the facies distribution should be assumed known and much computation time is needed for this method.
This research aims to characterize channel reservoirs using EnKF with recursive update of channel information: mean permeability of each rock face and ratio of facies. All of the former studies (Le et al., 2015; Lee et al., 2013a; Kim et al., 2016; Zhou et al., 2012a, 2012b) make an assumption that these channel information is fixed at specific value, which is rarely realistic. However, the proposed technique does not need any assumption on the channel information and figures out them as unknown parameters in EnKF. To follow the Gaussian assumption of EnKF, we apply NST to prior model parameters. In addition, by adding channel information variables to model parameters of each ensemble, these information values as well as petro-physical parameters (e.g. permeability) are updated simultaneously. In retransforming posterior parameters to the original parameters by inverse NST, updated mean permeability and facies ratio values are utilized to make better history matching.
Methodology
Ensemble Kalman filter
Kalman filter (KF) algorithm is a recursive process to minimize estimation error for linear problems and is applicable to real-time noise filtering (Kalman, 1960). EnKF was developed to improve KF algorithm for non-linear models (Evensen, 1994). Ensemble members, multiple equi-potential realizations of model parameters, are employed in EnKF for independent predictions. The mean of ensembles is assumed as true for the parameters and their covariance is measured as the estimation error. Each ensemble member is represented by state vector. The state vector of the

EnKF consists of two steps: prediction and assimilation. In the prediction step, initial ensembles are used for forward simulation until the next observed data are available. After getting observed data, the assimilation step updates ensemble models by using equation (2). The changes of ensembles are proportional to Kalman gain and the difference between observed data and predicted data. Especially, Kalman gain in equation (3) is designed to minimize the estimated error covariance. These two procedures are done repetitively to the last measurement data as a recursive update. Figure 1 shows the flow cart of EnKF.
The flow chart of a standard ensemble Kalman filter.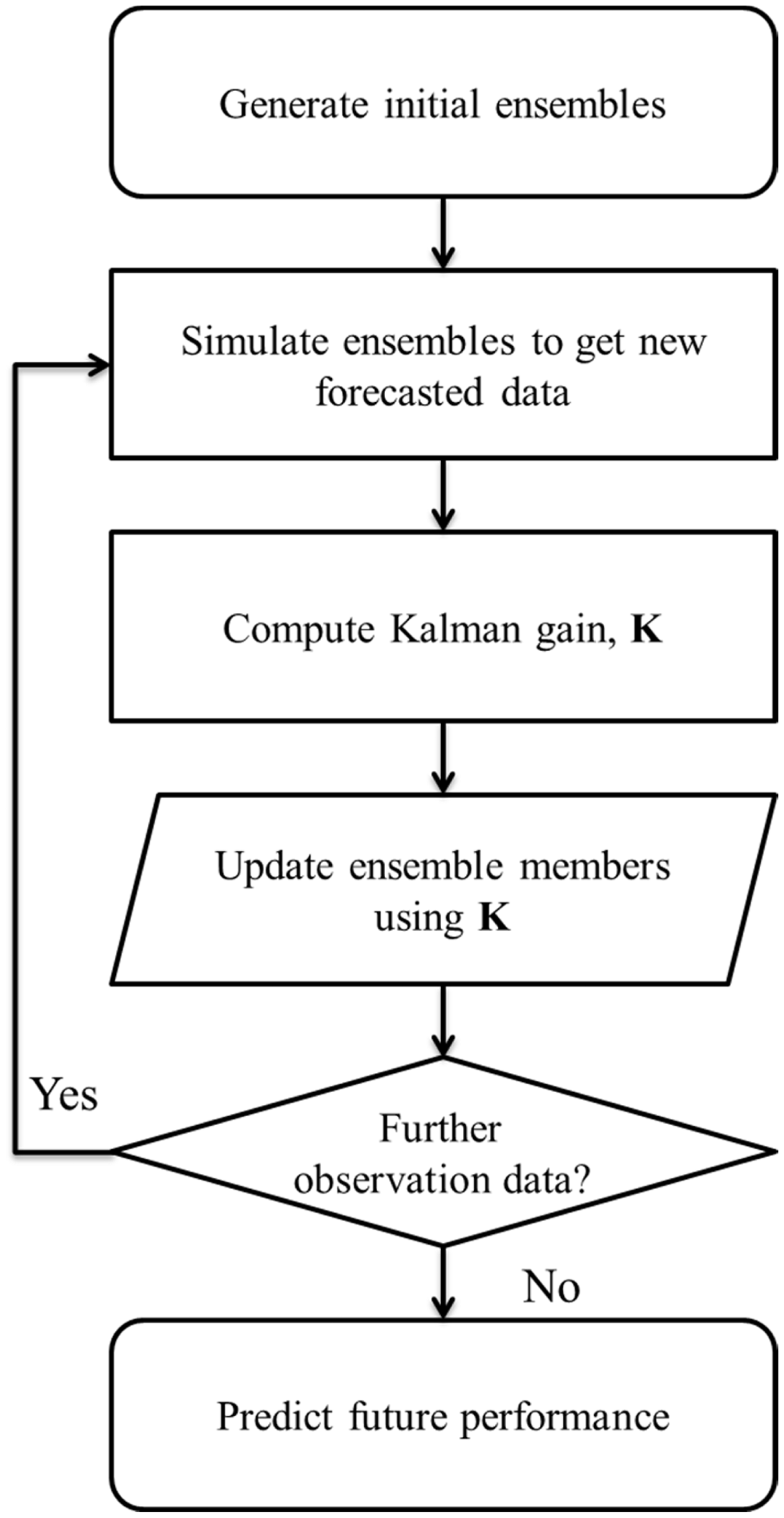


Normal-score EnKF
Many of the previous researchers have applied EnKF to synthetic permeability fields that follow Gaussian distribution after a log transformation (Evensen et al., 2007; Nævdal et al., 2002; Park and Choe, 2006). However, those conventional methods are not applicable for channel reservoirs with highly non-Gaussian distribution and typically result in overshooting and filter divergence problems (Shin et al., 2010; Zhou et al., 2012a, 2012b).
To make parameters of ensembles satisfy Gaussian distribution, additional pre- and post-process steps should be carried out. In the pre-process step, each model parameter of former state vector is transformed to a new variable by NST. It utilizes experimental cumulative distribution function (CDF), which is needed to construct NST functions. All new variables of transformed state vector follow the Gaussian distribution with zero mean and unit variance. After the assimilation, each model parameter of updated state vector should take inverse transformation as the post-process step. Shin et al. (2010) and Zhou et al. (2012a, 2012b) suggested to use previously constructed CDFs of each ensemble.
Figure 2(a) presents the concept of NST. The left graph is an experimental CDF of original parameters in an ensemble member. The right graph shows the CDF of the standard normal distribution with zero mean and unit variance. As the dotted arrow shows, each CDF value in the original data graph is transformed to the corresponding rank in the standard normal distribution. The transformed data satisfy the standard normal distribution (Choe, 2007). In order to transform back from the normal score data to the original data this procedure can be done inversely as shown in Figure 2(b).
Conceptual diagram of normal score transformation and its inverse transformation. (a) Normal score transformation; (b) inverse normal score transformation.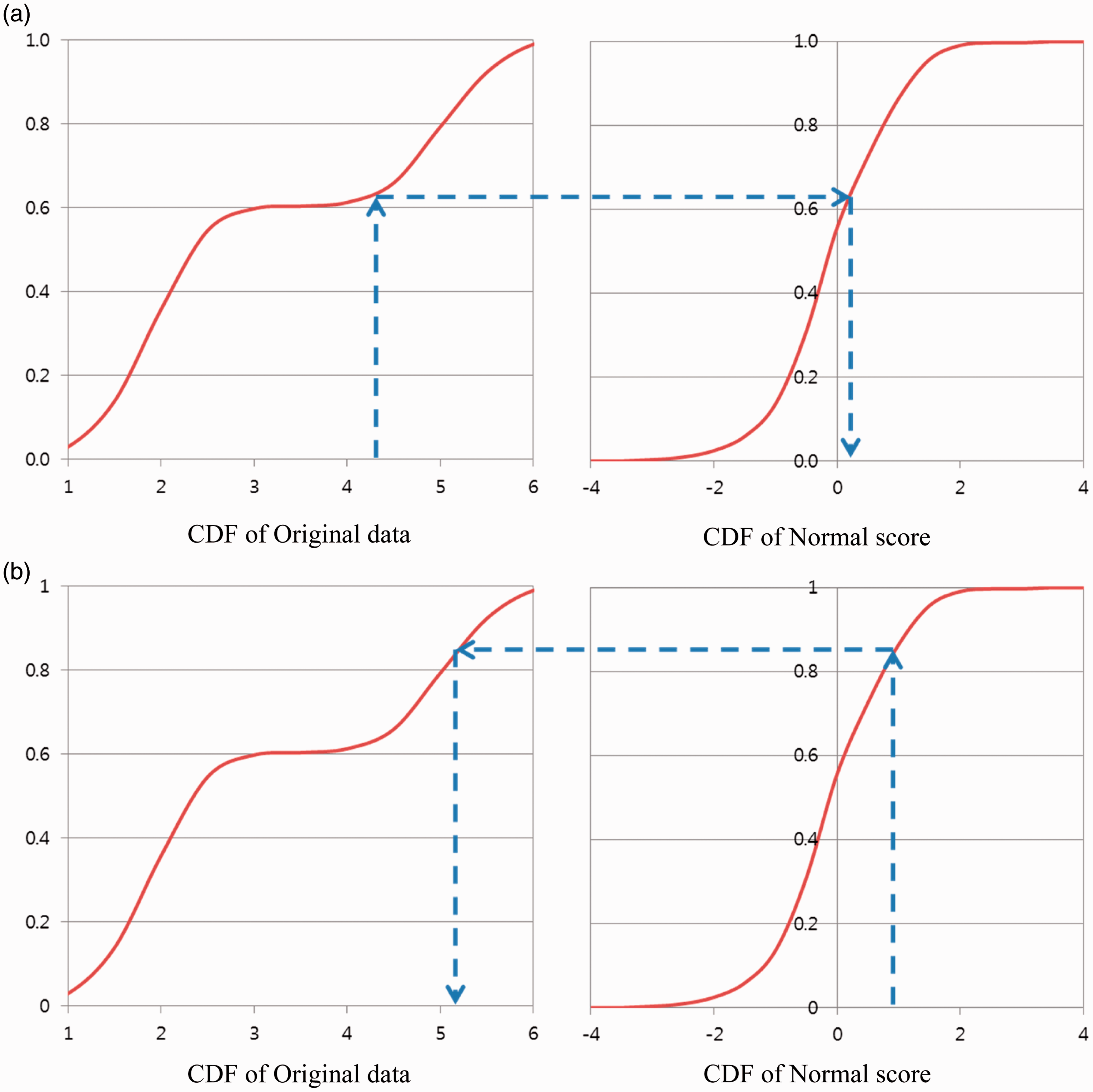
NS-EnKF with recursive update of channel information
It is true that NS-EnKF has advantages in preventing overshooting and preserving initial permeability distribution of channel reservoirs. However, if initial ensembles are made poorly due to lack of geological information, it cannot be applied to correct channel information such as facies ratio and mean permeability of each rock. In other words, NS-EnKF cannot fully characterize channel permeability fields, because it has no procedure to update incorrect channel information.
To overcome this limitation, we suggest NS-EnKF with continuous update of channel information. The proposed method includes additional procedure to update facies ratio and mean permeability of each rock. Figure 3 shows the flow chart of our proposed method. The key difference with the conventional NS-EnKF is the introduction of updating channel information recursively. After the assimilation step, updated normal score parameters are transformed back to real parameters to follow adjusted channel distribution trend. With this proposed method, we can figure out geological channel information of initial ensembles while assimilating other model parameters.
The flow chart of the proposed method.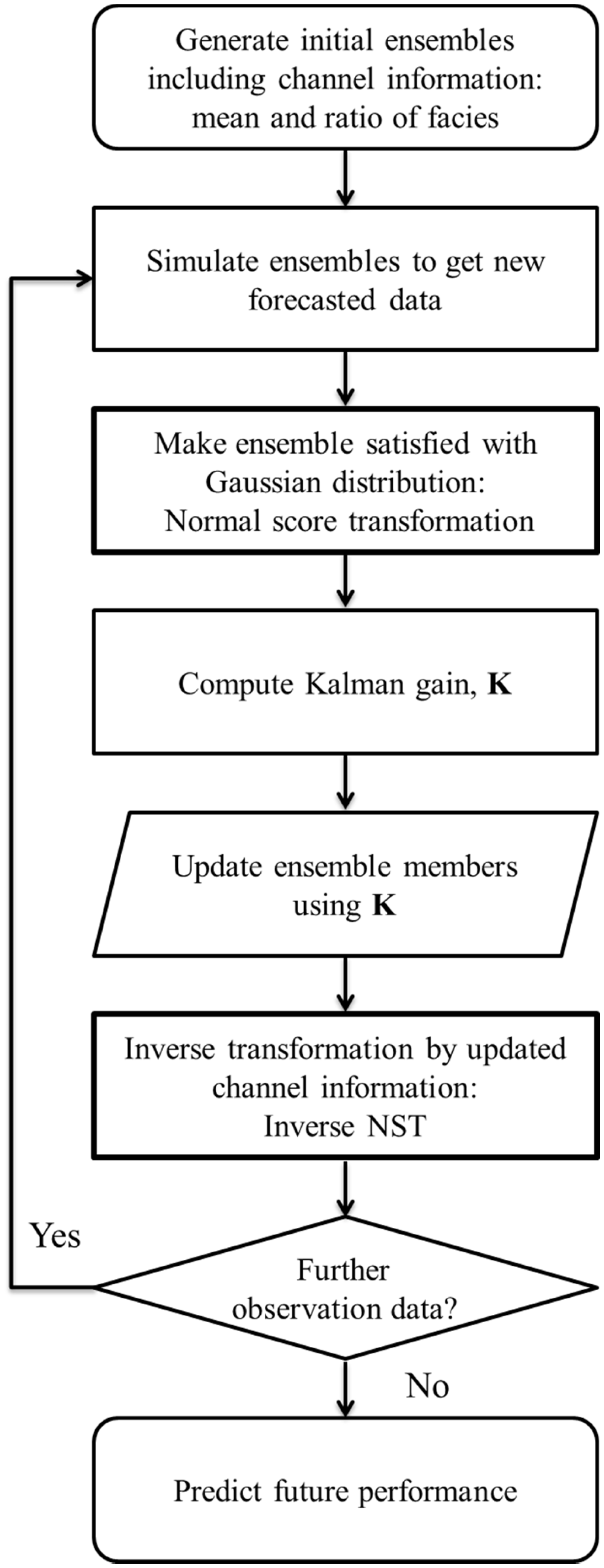
Results
Synthetic 2D case
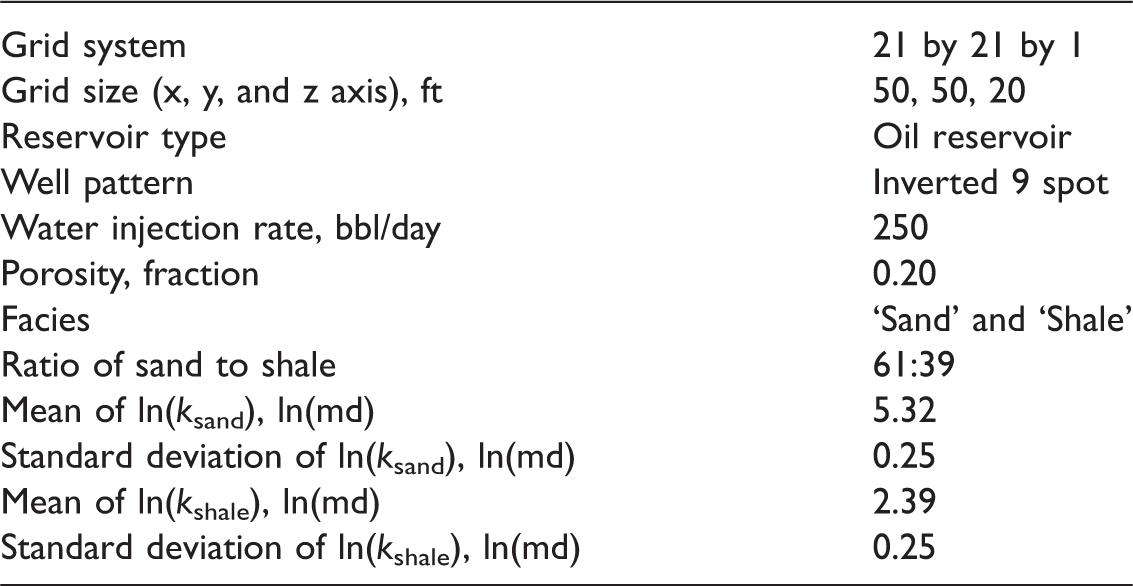
Reservoir parameters of 2D synthetic field.
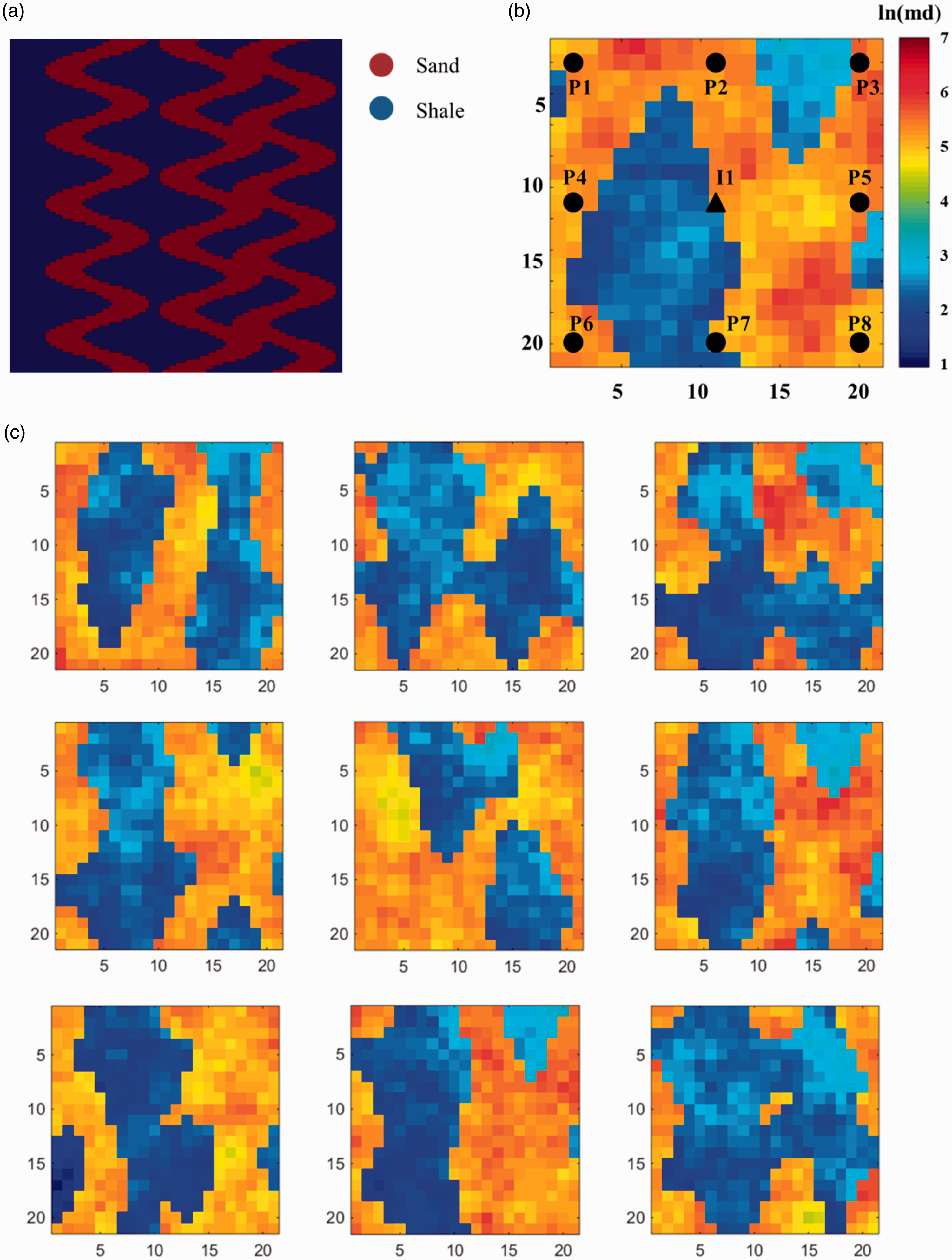
Synthetic 2D Channel fields: the reference and examples of initial reservoir models. (a) Training image; (b) the reference field; (c) examples of initial ensemble members.
One injector is surrounded by eight producers arranged in an inverted nine-spot pattern. Injection rate is 250 bbl/day and every producer is under constant pressure control. Observed oil production rates of each producer are utilized to assimilate ensemble parameters for 400 days. Prediction period is 1000 days after the history matching period.
Figure 5 presents the mean of the initial and updated permeability fields by each method. The initial ensembles show different trend of channel with the reference, even though they are made using the same known data. The reference field has strong connectivity between wells P1 and P2, but the initial field does not maintain visible connectivity. Figure 5(b) shows the updated mean permeability by the standard EnKF (STD EnKF). It has extremely high permeability in several points indicating evident overshooting. Moreover, the channels have poor quality with wide variations in permeability, while the reference does not. NS-EnKF alleviates overshooting, but it still loses channel connectivity, especially between wells P4 and P6 in the east side of the reservoir as shown in Figure 5(c). This causes oil production in well P6 to be reduced. Only the proposed method can find reliable channel pattern and solve overshooting (Figure 5(d)).
The mean permeability of initial ensembles and updated ensembles by the three methods compared. (a) Initial field; (b) STD EnKF; (c) NS-EnKF; (d) the proposed method.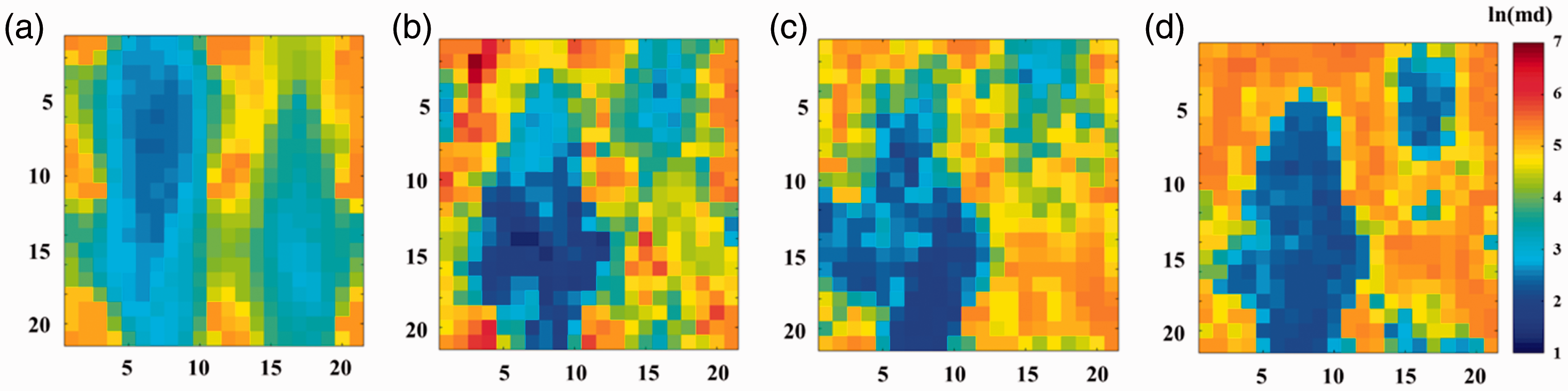
Two ensemble members, the 5th and 15th, are examined closely in Figures 6 and 7. By comparing these, we can discern difference of each method. In the STD EnKF case, overshooting becomes prominent in both of the ensemble members. The updated field can hardly distinguish sand from shale due to its Gaussian assumption (Figure 7(c)), which is quite different from the reference in Figure 7(a). NS-EnKF does not show overshooting, but gives very poor channel connectivity. It cannot figure out key channel characteristics such as facies ratio, mean of sand permeability, and mean of shale permeability. That is why the connectivity of channel gets feeble, especially for the 15th member in Figure 6(c). If the initial facies ratio is different with the reference, NS-EnKF cannot characterize this information properly, although a bimodal distribution is managed as shown in Figure 7(d).
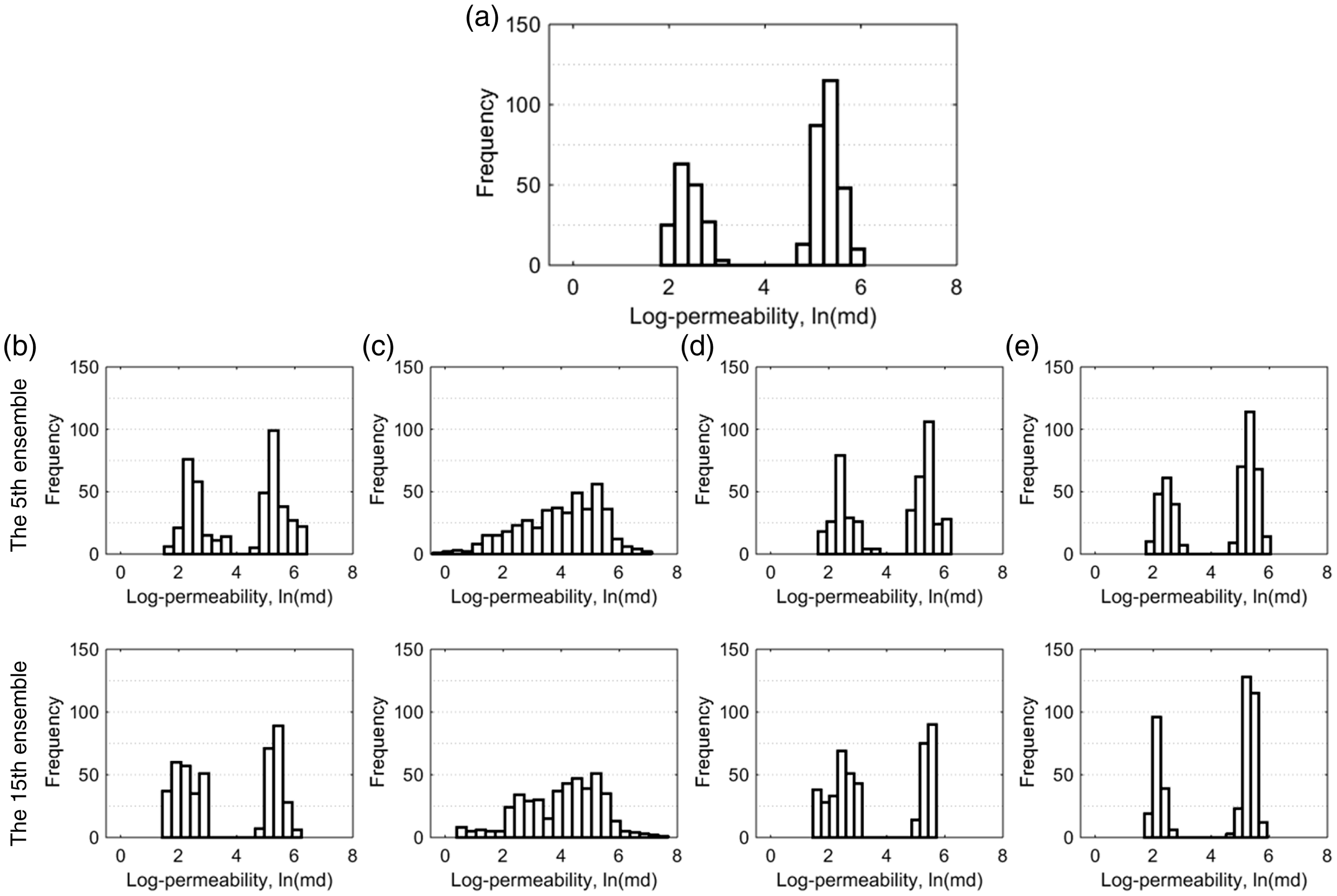
Two examples of updated permeability by the three methods. (a) Initial field; (b) STD EnKF; (c) NS-EnKF; (d) the proposed method. Permeability histogram of the reference field and two updated ensemble members by the three methods. (a) Reference; (b) initial field; (c) STD EnKF; (d) NS-EnKF; (e) the proposed method.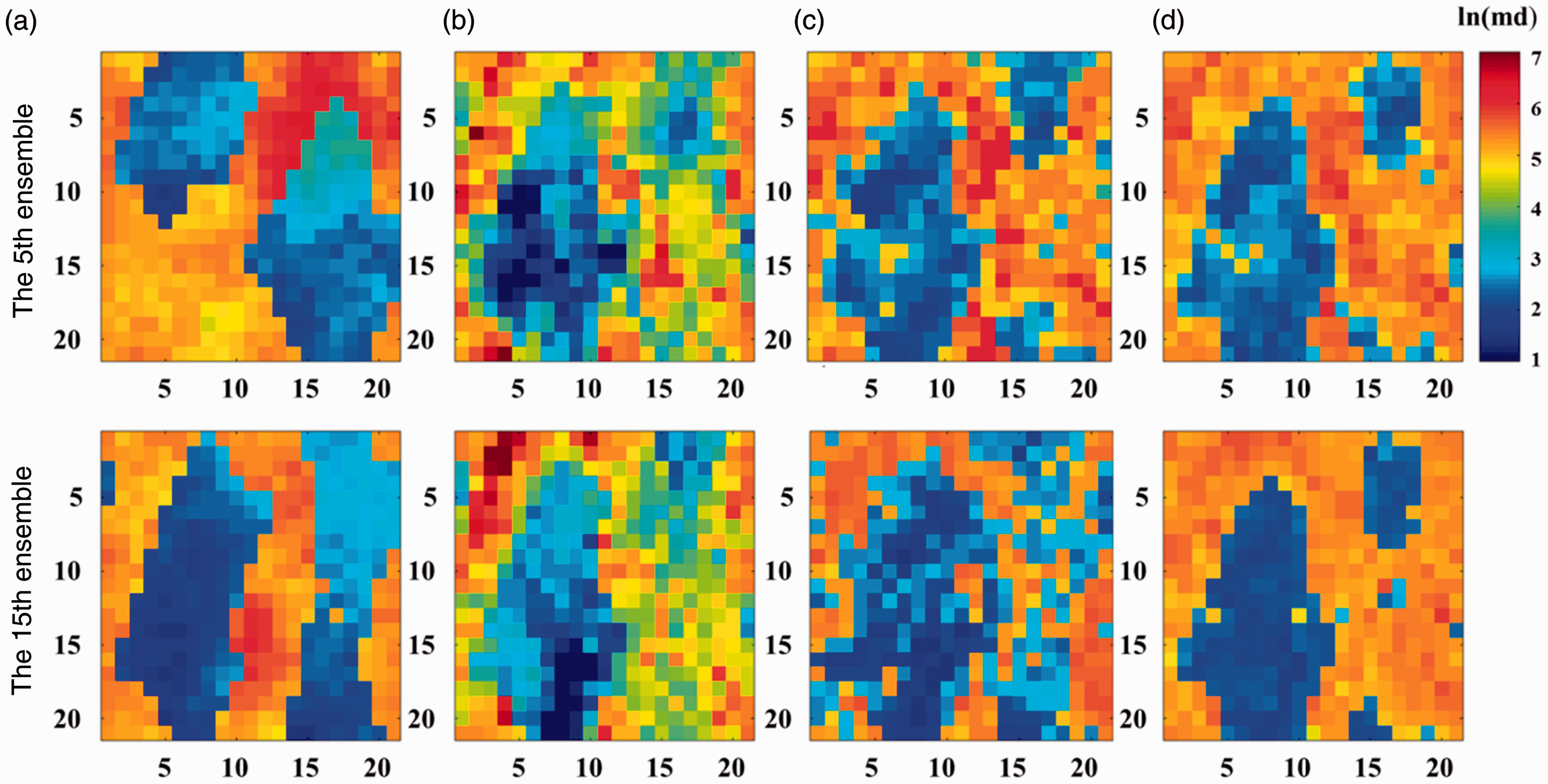
However, the proposed method shows very similar channel pattern with the reference (Figure 6(d)), while maintaining the bimodal distribution for the both members (Figure 7(e)). This means that the proposed method overcomes the limitation of the conventional NS-EnKF by updating permeability and channel information simultaneously.
Figure 8 shows oil and water production rates predicted at wells P1 and P3. The initial ensembles show high uncertainty in the both cases (Figure 8(a)). The STD EnKF reduces uncertainty of the ensembles after the update, but its predictions are biased having the reference one far off the center (Figure 8(b)). It results from weak channel stream between the injector and the producers as shown in Figure 6(b). NS-EnKF improves the results and covers the reference value in the band, but the average oil production of ensembles mismatches the reference one.
Prediction of oil and water productions by the three methods: well oil production rate (WOPR) and watercut (WWCT) of wells P1 and P3. (Grey, blue, and red lines mean each ensemble member, the average of them, and the reference one, respectively.) (a) Initial field; (b) STD EnKF; (c) NS-EnKF; (d) the proposed method.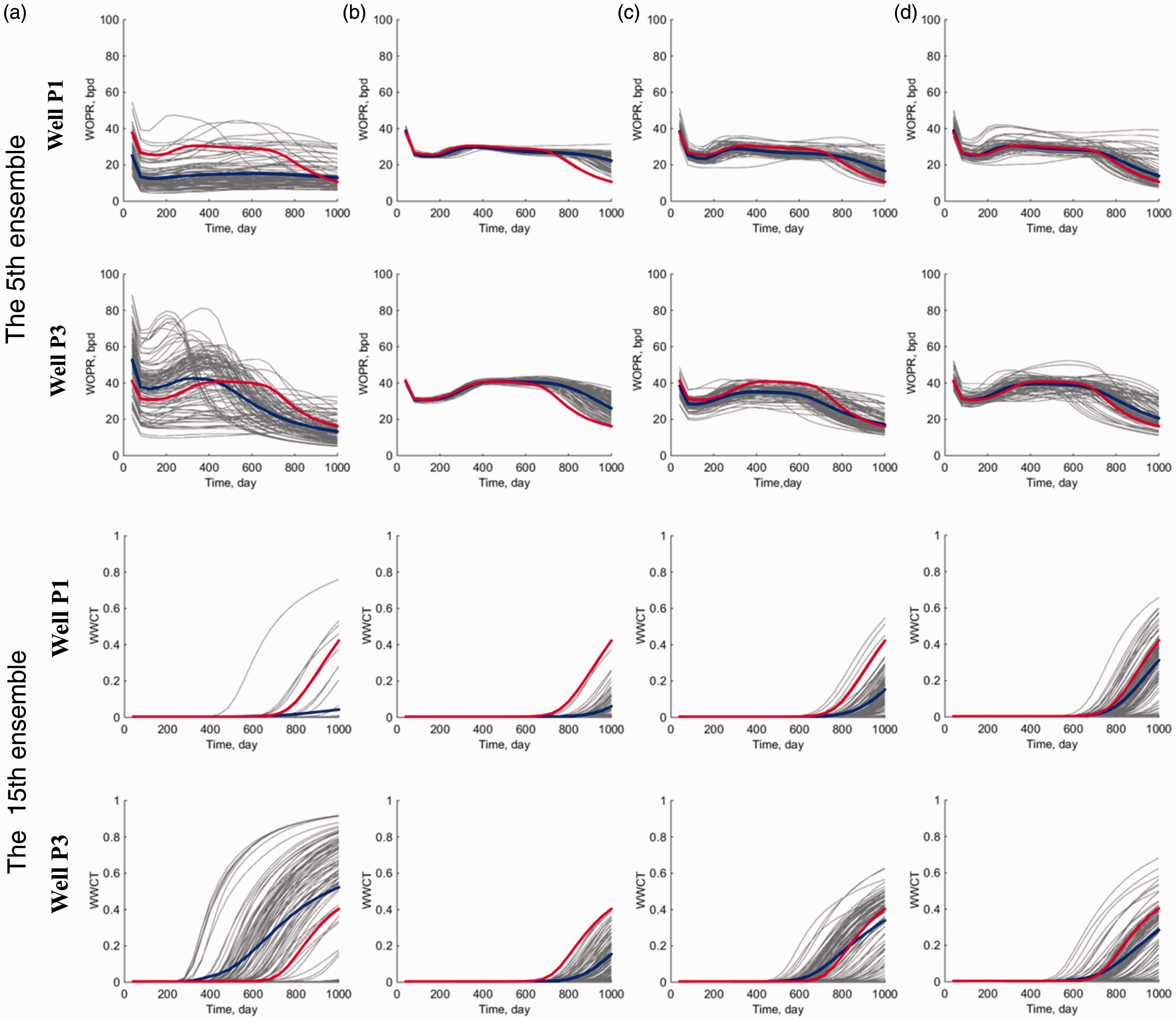
However, the proposed method provides sensible future performances as shown in Figure 8(d). The range of oil production rates covers the real one properly. Moreover, the average of watercut prediction is similar to the reference, while the STD EnKF and NS-EnKF cannot do. Crucial differences between the proposed method and the other methods compared are whether the average follows the true value and uncertainty range covers the real one at the same time.
By checking the total oil and water productions (Figure 9), we can double check performances of each ensemble member and individual well. After the assimilation, the result of STD EnKF gets close together to reduce uncertainty, but it is biased with the sign of filter divergence (Figure 9(b)). NS-EnKF reduces uncertainty properly to cover the reference value, but the average value is still off from the true case (Figure 9(c)). The proposed method provides proper uncertainty range with following the true value. It gives better estimation of future performances than EnKF and NS-EnKF do in the point of ensembles’ band and its average performances.
Total forecasted production using the results of the three methods: field oil production total (FOPT) and field water production total (FWPT). (Grey, blue, and red lines mean each ensemble member, the average of them, and the reference one, respectively.) (a) Initial field; (b) STD EnKF; (c) NS-EnKF; (d) the proposed method.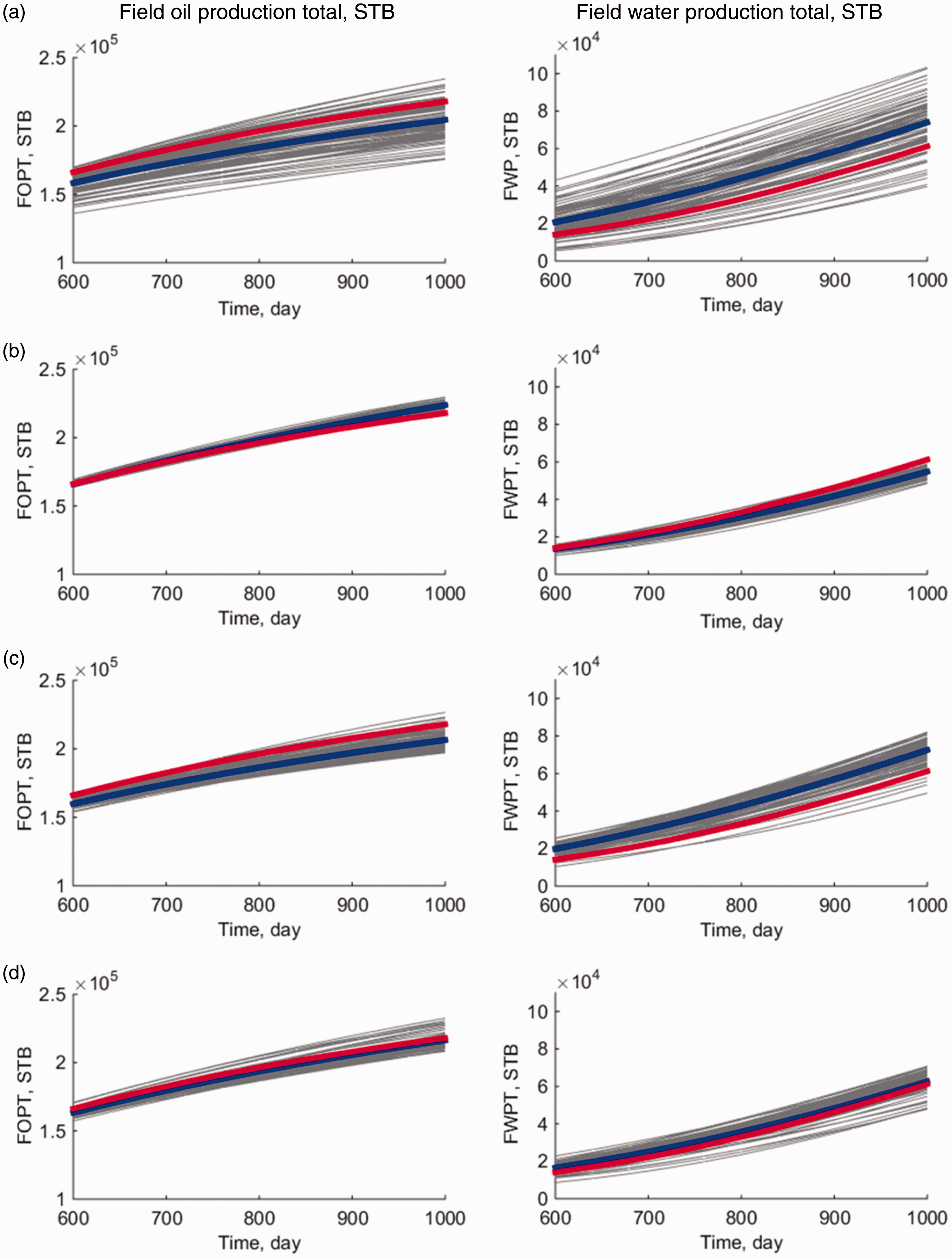
Figure 10 further demonstrates that the proposed method shows good performances in characterizing channel information. Although initial mean permeabilities of sand and shale have wide ranges, the updated mean permeabilities gather together with covering the true value (Figures 10(a) and 10(b)). Histogram of the facies ratio in Figure 10(c) clearly verifies the performance of the proposed method. Even though initial facies ratios are small and the average of them is far from the reference one, the proposed method updates it to find the true value with properly reduced uncertainty.
Histogram of the mean permeability and sand ratio before and after the assimilation by the proposed method. (a) Mean of sand; (b) mean of shale; (c) sand ratio.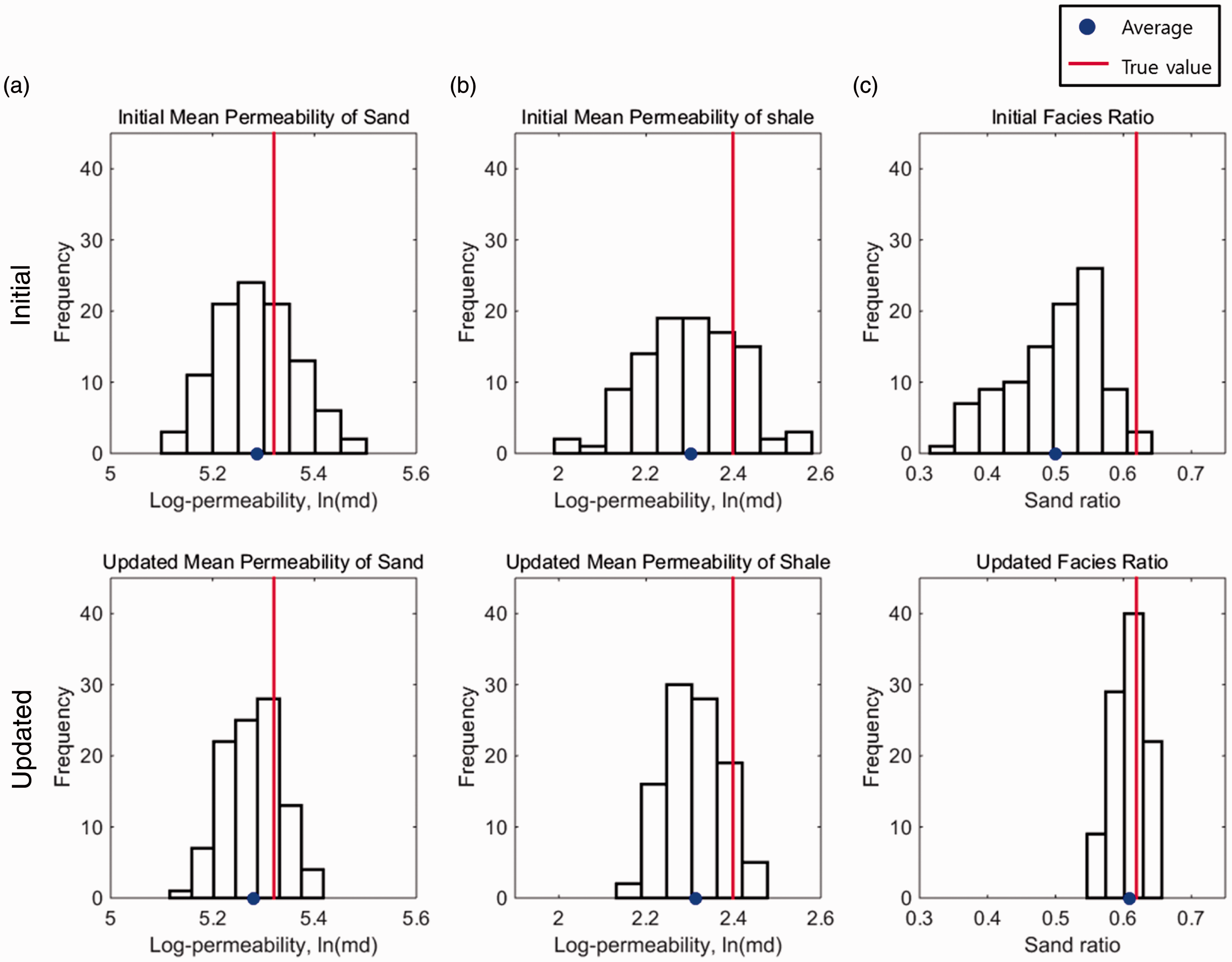
Real 3D case
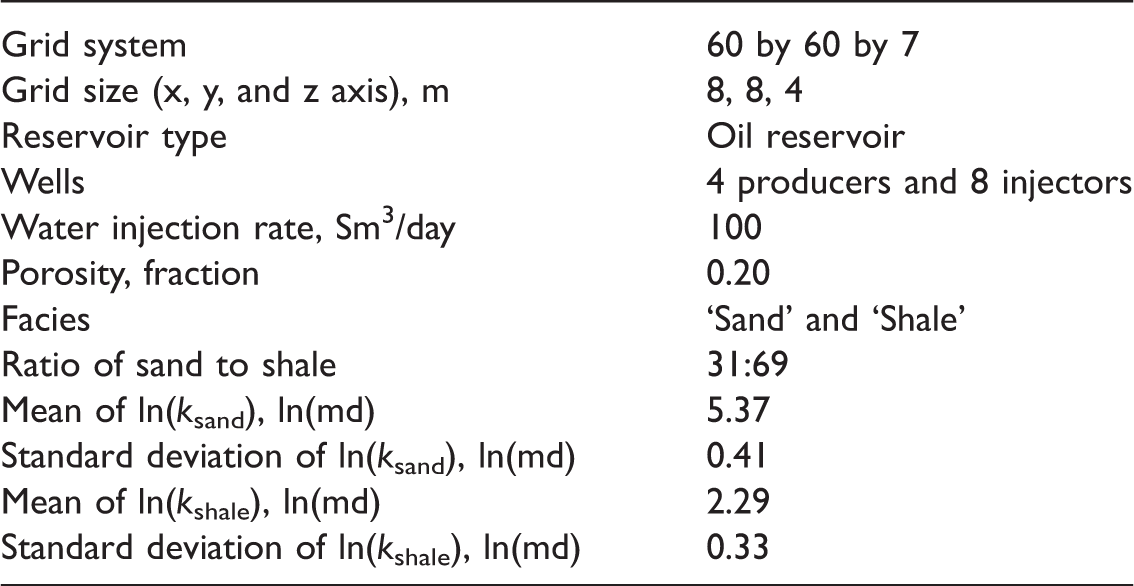
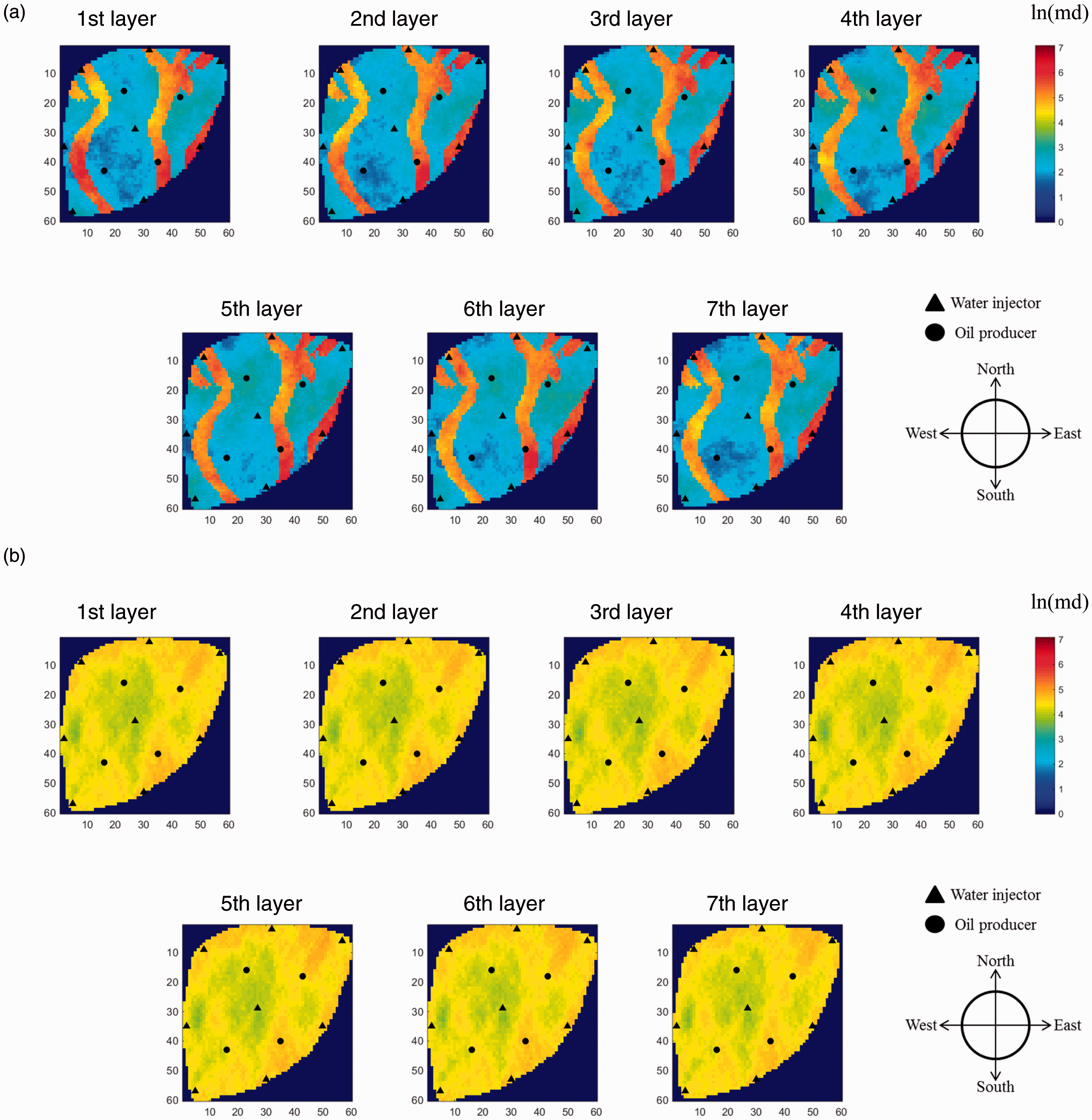
The proposed method is applied to a benchmark reservoir model to prove that the method is competent for a large scale and complicated channel reservoir as well. Egg model is a meandering channel reservoir with eight water injectors and four producers. It is composed of 60 by 60 by 7 grid cells and total number of active cells is 18,553. The non-active cells are positioned at outside of the model and this makes an-egg-shaped model of active cells as known as Egg model (Figure 11). The grid size is 8 m in x and y directions and 4 m in z direction. Other specific parameters for Egg model are listed in Table 2. Figure 12 displays reference permeability field and initial mean permeability field in each layer. Reference Egg model has two clear channel stream from north to south in every layer. However, due to high heterogeneity of channel pattern and limited available data, initial mean permeability field hardly shows recognizable channel stream as presented in Figure 12(b).
Reference permeability field of Egg model and locations of wells. Reservoir parameters of Egg model. Reference permeability and mean of initial permeability in each layer: Egg model. (a) Reference permeability field; (b) mean of initial permeability field.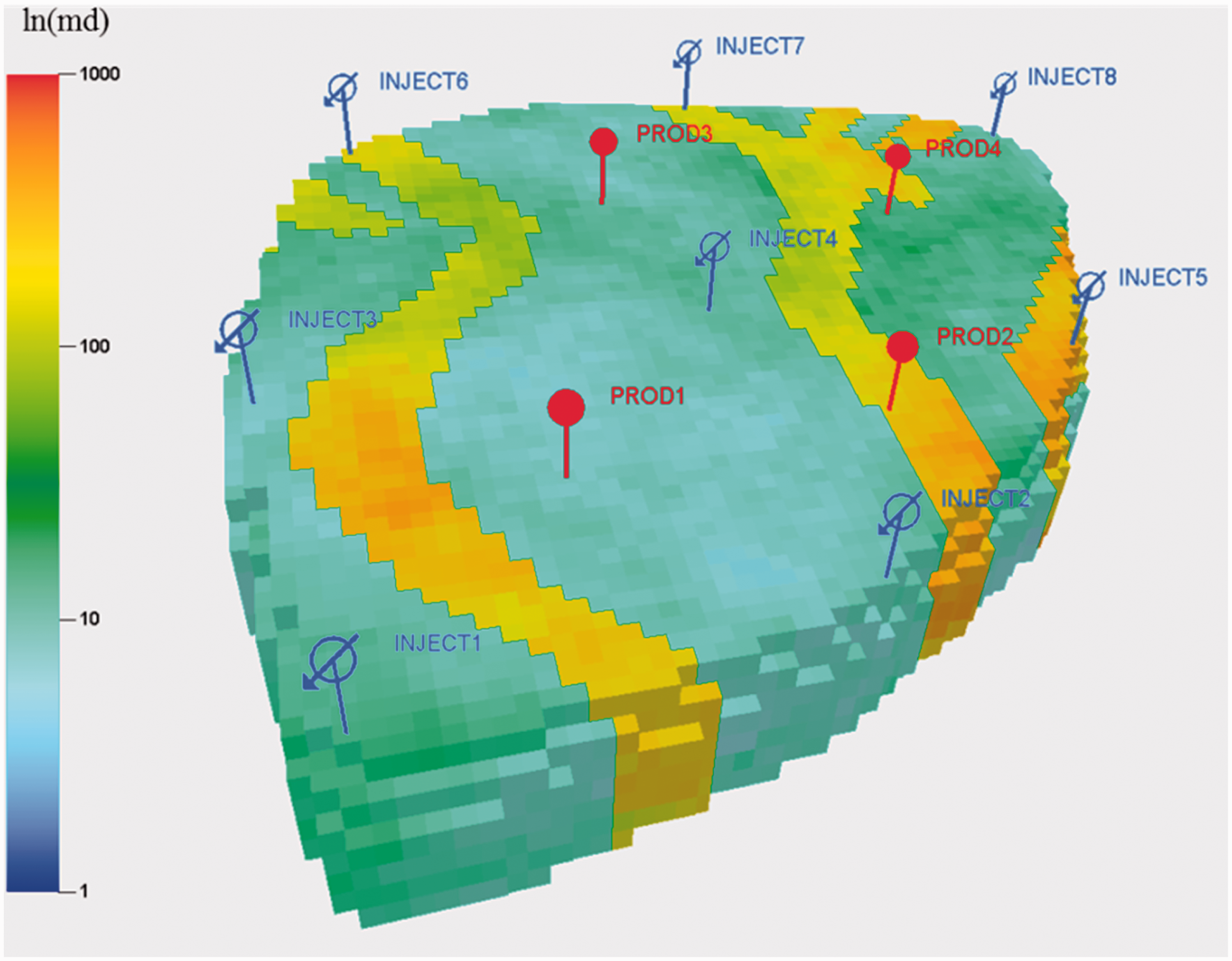
In Egg model reservoir, the injectors are designed to inject water at 100 Sm3/day and the producers produce oil under constant pressure condition. Production rates of the producers and bottom-hole pressures of the injectors are utilized to assimilate ensemble parameters for 500 days. Prediction period is 1000 days after the history matching period.
Figure 13 shows updated mean permeability using the STD EnKF and the proposed method. Although the STD EnKF updates the initial ensembles, it results in overshooting and unclear channel pattern. The reference has strong connectivity between wells P2 and P4, but the updated field fails to maintain visible connectivity between them. The proposed method manages overshooting problem and can figure out reliable channel pattern (Figure 13(b)).
Mean of updated ensembles in each layer: Egg model. (a) Updated permeability field by the standard EnKF; (b) updated permeability field by the proposed method.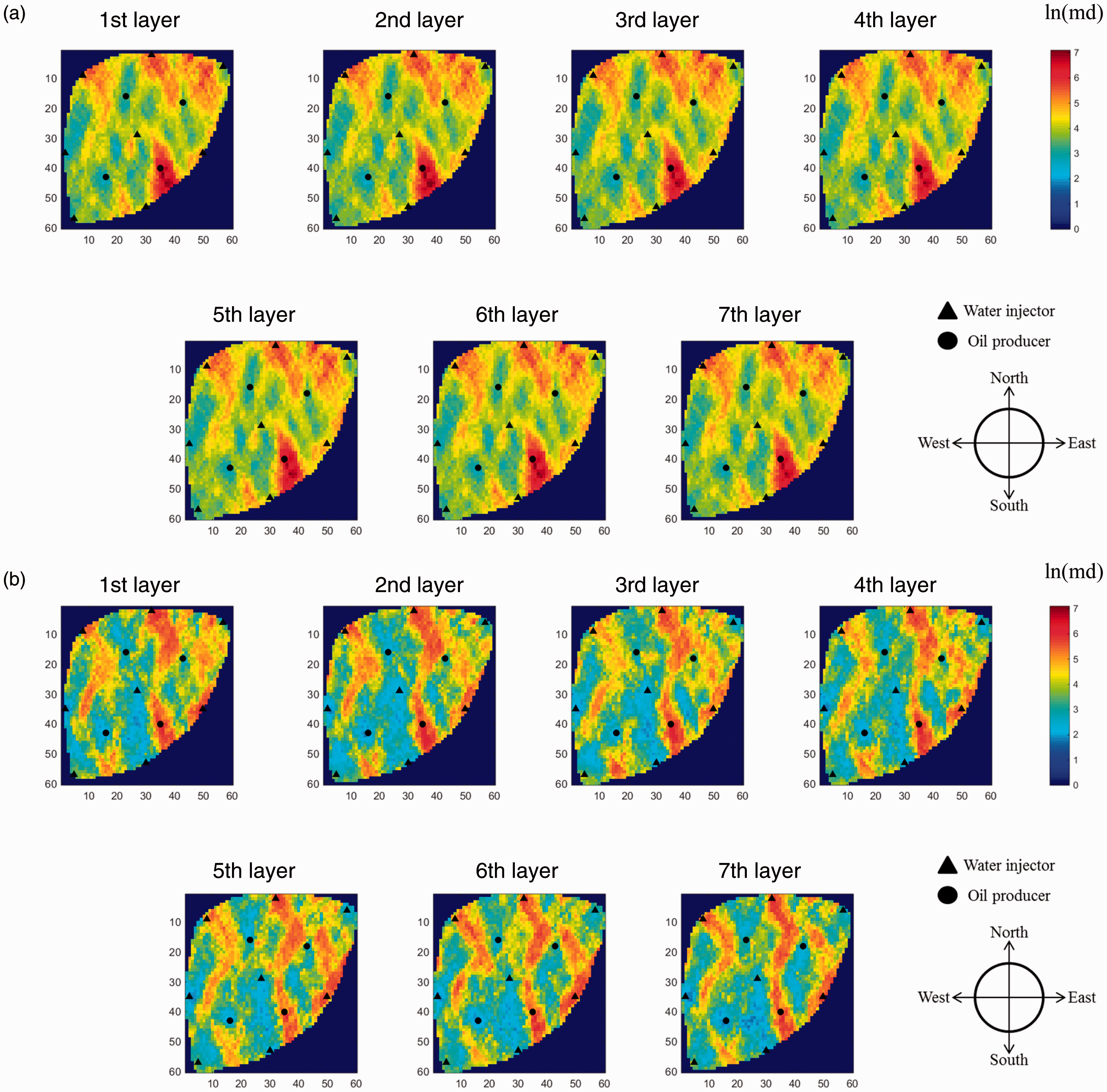
To verify excellence in characterizing performances of the proposed method, five ensembles are closely investigated. Figure 14 presents permeability of the second layer in each case. In the STD EnKF case, it cannot preserve channel stream and has severe overshooting with high tail values in the histogram in Figure 14(b). The boundaries between sand and shale are smeared because updated permeability is changed to follow a Gaussian distribution instead of the initial bimodal distribution, especially in the 20th, 40th, and 100th members. Even though the permeability distribution of the 80th member is a bimodal distribution, it is far from the reference case. However, the proposed method overcomes overshooting and finds proper channel trend. By applying NST and updating channel information recursively, it can preserve sharp facies boundaries and the bimodal distribution.
Permeability field and histogram of each ensemble member: the 2nd layer in Egg model. (a) Initial ensemble members; (b) updated ensemble members by the standard EnKF; (c) updated ensemble members by the proposed method.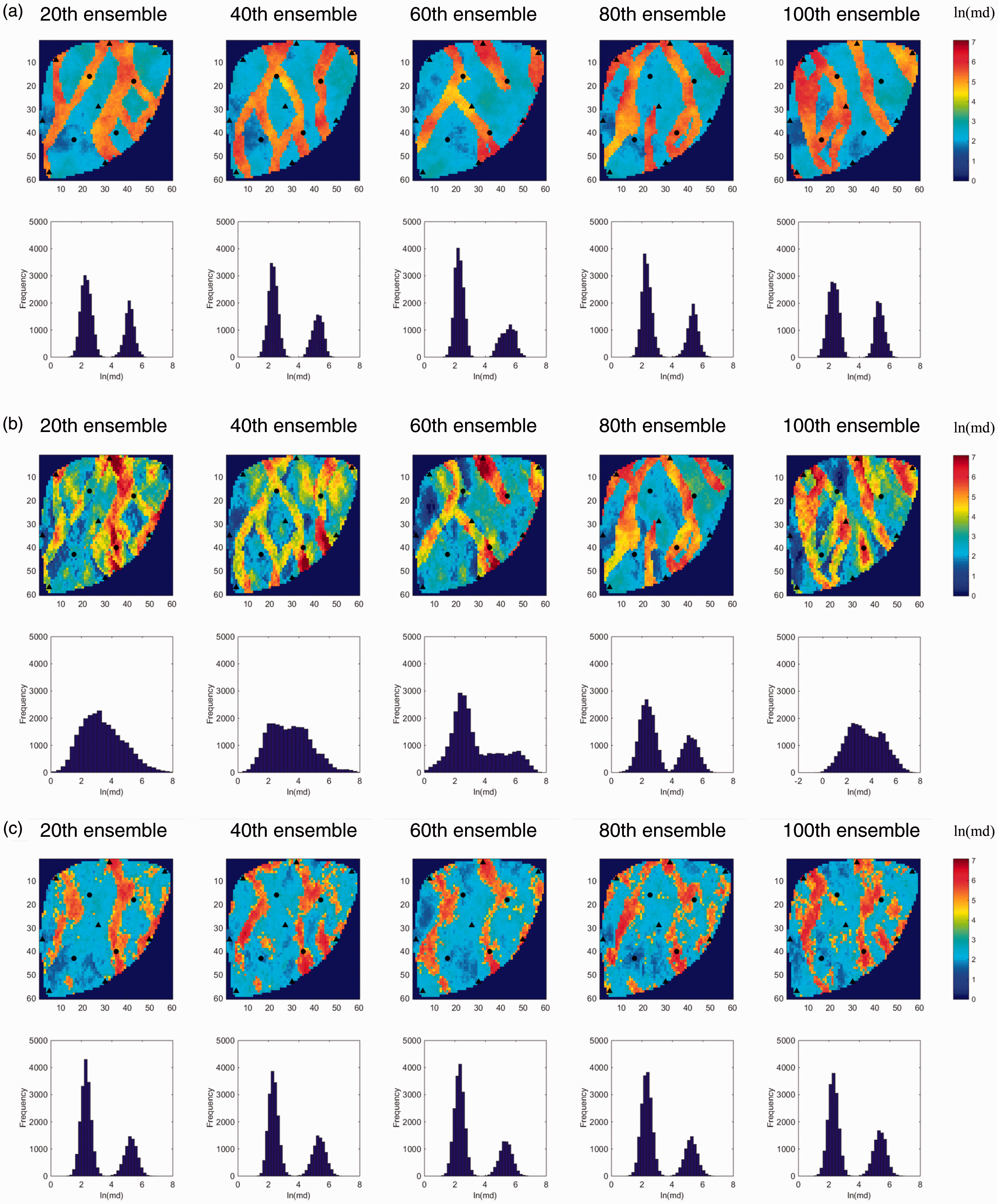
Figure 15 presents oil production rates of wells P1, P2, P3, and P4. The initial ensembles show high uncertainties in every production well due to severe heterogeneity of the channel reservoir (Figure 15(a)). By applying the updates, the STD EnKF reduces uncertainty in reasonable ranges. As shown in Figure 15(c), the proposed method improves prediction performances meaningfully. All of the reference oil rates are covered by the ensemble members and the averages of the ensembles are located more closely than the STD EnKF. Total oil and water productions in Figure 16 also prove that the proposed method gives more reliable prediction performances with dependable uncertainty band than the other does.
Prediction performances in Egg model: WOPR. (Grey, blue, and red lines mean each ensemble member, the average of them, and the reference one, respectively.) (a) Initial field; (b) STD EnKF; (c) the proposed method. Total forecasted oil and water productions using the results of the two methods in Egg model: FOPT and FWPT. (Grey, blue, and red lines mean each ensemble member, the average of them, and the reference one, respectively.) (a) Initial field; (b) STD EnKF; (c) the proposed method.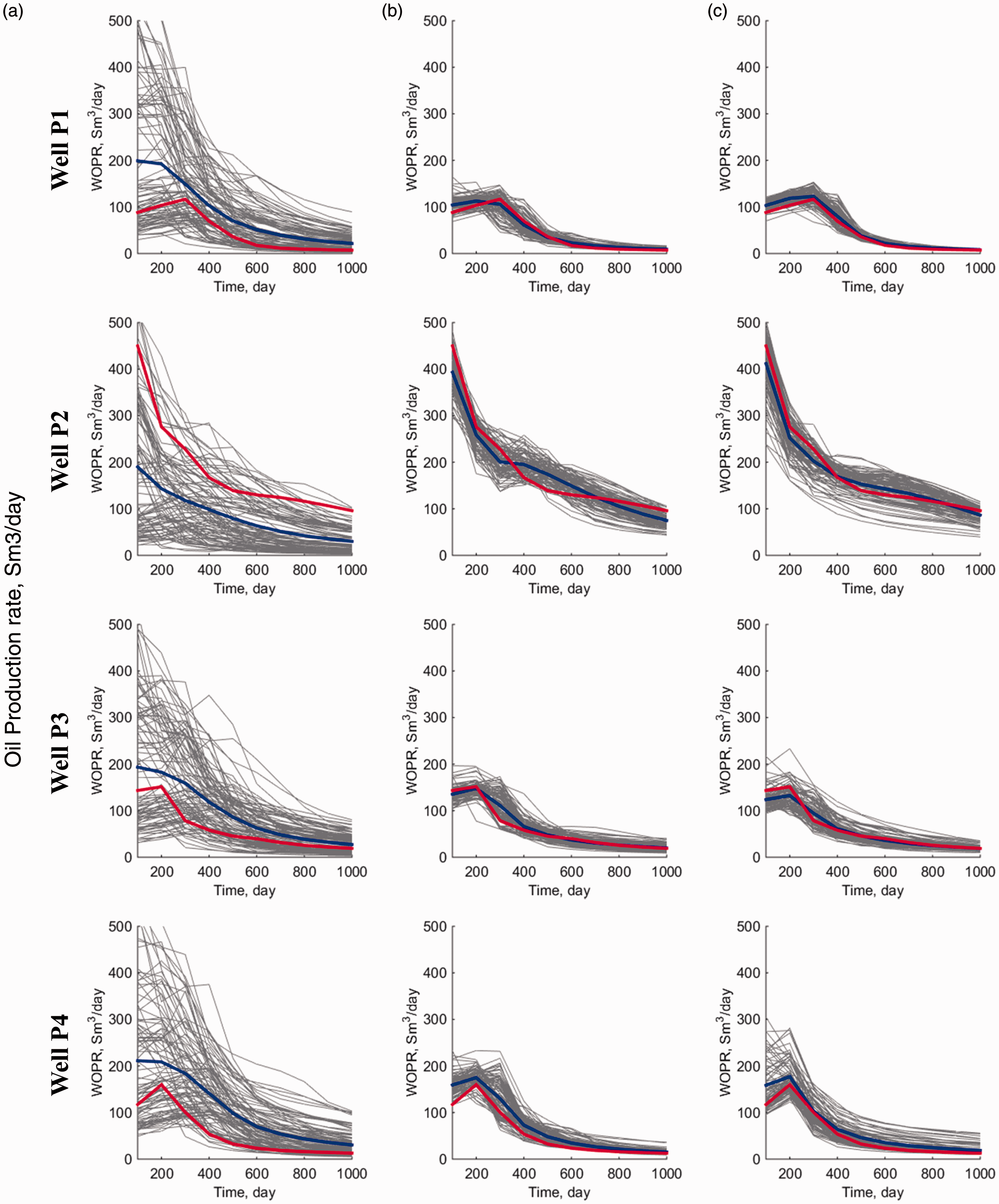
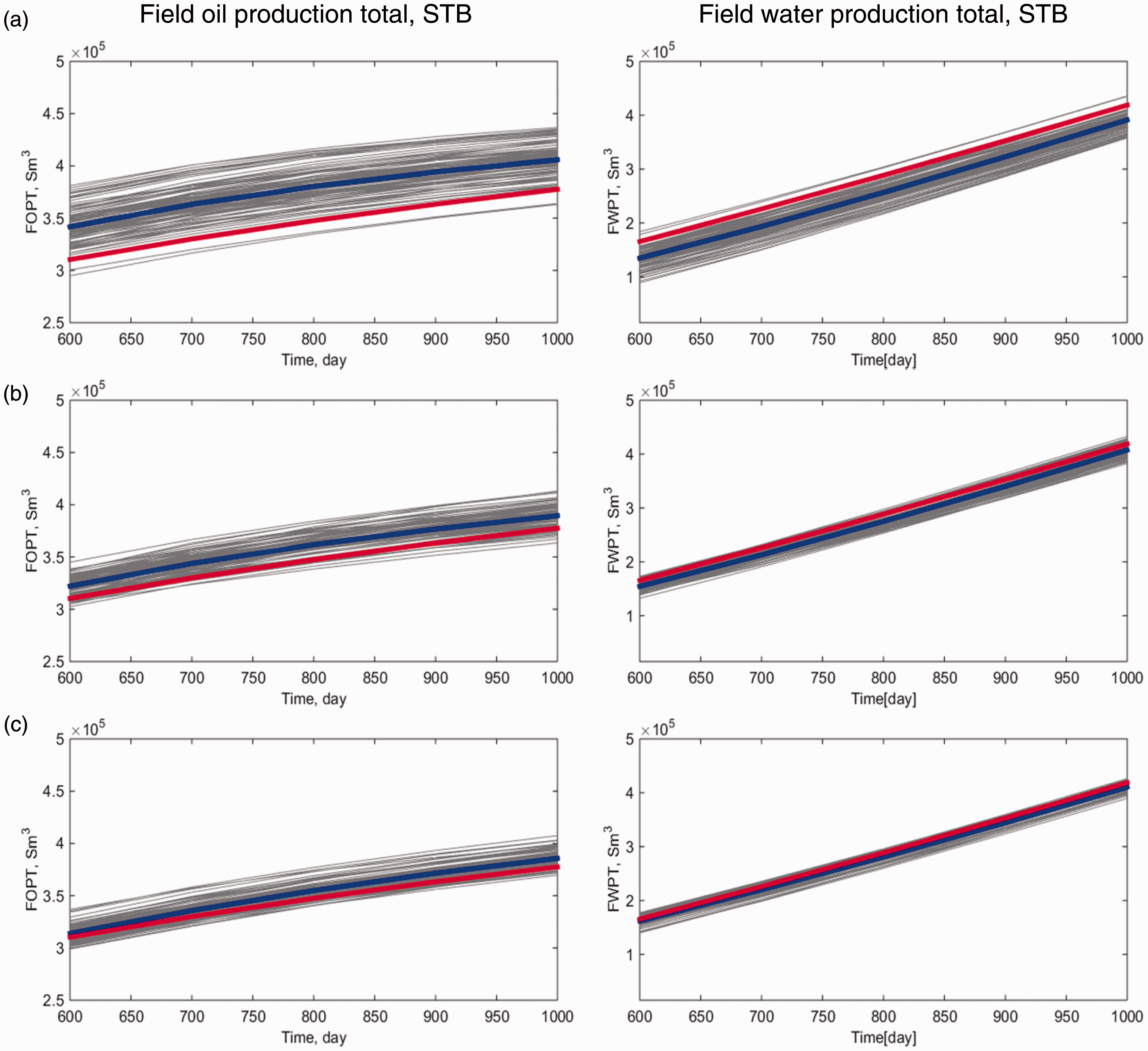
Figure 17 shows histograms of channel information before and after the history matching. Although initial channel characteristics such as mean permeability of each rock face and facies ratio of Egg model are distributed in broad ranges, the proposed method successfully calibrates them similar to the true values. This confirms that the proposed method is applicable for characterizing channel information in 3D channel reservoirs as well.
Histogram of the mean permeability and sand ratio before and after the assimilation by the proposed method: Egg model. (a) Mean of sand; (b) mean of shale; (c) sand ratio.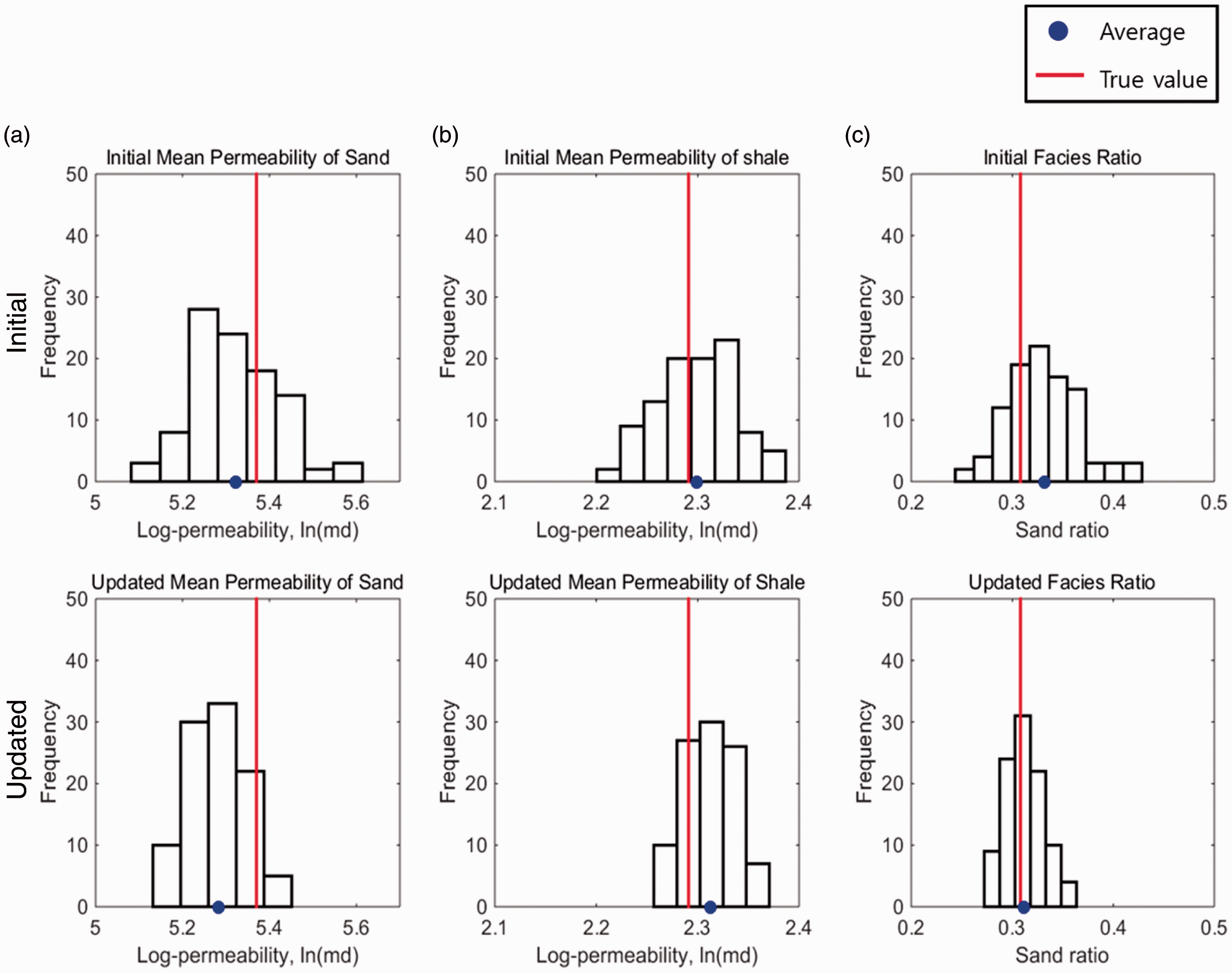
Conclusions
In this study, we suggest a new ensemble-based history matching method for channel reservoirs by applying NST and updating channel information recursively. NST makes parameters of ensemble members follow a Gaussian distribution, which is an inherent assumption of EnKF scheme. Moreover, by updating channel information as one of model parameters, the proposed method can figure out the true values. The three methods are applied and compared with one another to identify characterization and uncertainty quantification performances in channel fields.
A STD EnKF cannot characterize the reference permeability of channel reservoirs with severe overshooting. The permeability histogram of updated ensembles changes from a bimodal distribution to a Gaussian distribution, because of the Gaussian assumption of EnKF. This smears the boundary of rock facies and cuts the connectivity of channels unlike the true case. Therefore, the STD EnKF cannot provide dependable uncertainty quantification of future performances.
NS-EnKF can preserve an initial bimodal permeability distribution of each ensemble member. This alleviates overshooting and may characterize overall channel pattern. However, it maintains the initial channel information such as facies ratio and the mean permeability of each rock face. Therefore, if those initial values are quite different from the reference due to limited data available, it provides poor characterization results.
The proposed method overcomes the drawback of NS-EnKF by recursively updating channel information. Even if the initial channel information differs from the true one, the proposed method can assimilate the value properly to be similar to the reference one. Therefore, it finds channel pattern with clear facies boundary and connectivity of channel stream. In addition, it reduces overshooting problem without any modification of EnKF algorithm. The updated ensembles match both well production rates and field total productions with proper uncertainty ranges, which cover the real one. Therefore, the proposed method enables us to make sensible decisions.
We propose and verify the new ensemble-based history matching method without complex modifications or additional pre-processing. The two key schemes are use of NST to satisfy inherent EnKF assumption and recursively update of channel information as a static variable. The proposed method shows considerable improvement of history matching in channel reservoirs by applying these two schemes.
Footnotes
Authors’ note
This research is conducted through The Institute of Engineering Research at Seoul National University, Korea.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The Ministry of Trade, Industry, and Energy (20142520100440).