
Abstract
This paper introduces a novel sliding mode controller to regulate frequency within a decentralized control framework. The decentralized frequency regulation model is a continuous-time linear system with mismatch disturbance that cannot be effectively removed. The proposed method combines the sliding mode and active disturbance rejection theories to reject the effects of mismatched disturbances with the aid of a disturbance observer to achieve a fully decentralized frequency regulation control. Furthermore, the sliding variables can be directly computed using the proposed steady-state method. In addition, by incorporating a constant delay into the input of the sliding mode controller, the transient performance is improved, resulting in a smaller overshoot and a shorter response time. Specifically, the proposed method demonstrated enhancements over the liner active disturbance rejection algorithm (5.04% and 54.4%, respectively), conventional proportional integral derivative method (5.09% and 68.03%, respectively), disturbance observer–based integral sliding mode control method (6.59% and 84.34%, respectively), and disturbance observer–based adaptive integral sliding mode control method (5.93% and 82.47%) in terms of both overshoot and response time.
Keywords
Introduction
load frequency control (LFC) is a critical aspect of power system operation, essential for maintaining grid stability, ensuring system reliability, and managing economic implications. In recent years, the uncontrollable renewable resources (electric vehicles, household batteries, etc.) installed on the consumer side and stochastic power demand can cause undesired frequency fluctuations, which push the pressure on the generators to stabilize the power system (Lu et al., 2016). Therefore, an LFC technique is urgently required to maintain the frequency within tolerable limits.
Considerable research efforts have been dedicated to the investigation of LFC. The LFC methods can be classified into centralized LFC control and decentralized LFC control. In the first category, the tie-line powers are employed for constructing an input signal. The proportional–integral–derivative (PID) control methods (Khodabakhshian and Edrisi, 2008), optimal control (Daneshfar and Bevrani, 2012), and H-∞ control (Davidson and Ushakumari, 2016) are widely used due to their simple design procedure. In contrast, decentralized LFC is another category that regards tie-line power as an external disturbance (Khousa and Ismail, 2013). It involves aggregating disturbances and rejecting them at the input channel. However, the performance can be further improved. In recent years, the power system has shifted toward decentralized control (Shirkhani et al., 2023), which only necessitates local measurements. This has led to a notable reduction in communication requirements. As a result, our main goal is to regulate frequency through decentralized control.
Among variable control methods, sliding mode control (SMC) is considered a promising solution for frequency regulation because of its strong robustness. SMC is believed to enhance system performance by providing fast response times, easy implementation, resistance to plant parameter variations, and robust rejection of external disturbances. Various integral sliding mode control (ISMC) has been proposed to regulate the frequency. A predictive-based ISMC is proposed by Dev et al. (2021), which utilizes an ISMC to regulate the frequency. Nevertheless, this approach is constructed upon a centralized control framework. Furthermore, the disturbance observer-based ISMC (DOB-ISMC) is widely used. The adaptive disturbance observer adaptive ISMC is proposed by Mi et al. (2016) and Wang et al. (2016) to regulate the frequency. However, the proposed method is built based on the centralized scheme, and the estimated disturbance is not fully utilized. A novel sliding surface based on the state variable transformations is proposed by Liao and Xu (2017) to stabilize the power system. However, this method is not generalizable and can only be applied to specific systems. In addition, a new sliding surface based on a transferred system is constructed and proposed by Tummala et al. (2018), which highly depends on the estimation accuracy of the disturbance observer. In Farivar et al. (2022) and Zhang et al. (2016), a novel sliding surface is constructed by combining H-∞ theory. However, the advantage of sliding mode theory is not fully taken.
Motivated by the above discussion, the first goal of this paper is to design a sliding surface that can fully take advantage of the SMC employed in the decentralized LFC control scheme. In addition, the impact of the estimation accuracy of the observer on the performance of LFC has often been overlooked. Therefore, the second goal is to design a method to mitigate estimation errors in the DOB-ISMC performance.
Simplifying the process of tuning the parameters of an ISMC system is another consideration in this paper. In recent years, various parameter tunning methods have been taken for optimal performance including artificial bee colony (ABC) (Bagheri et al., 2021), particle swarm optimization (PSO) (Mu et al., 2017), marine predators algorithm (MPA) (Guha, 2023), gray wolf optimization (GWO) (Guha et al., 2016), and genetic algorithm (GA) (Vrdoljak et al., 2010) to regulate frequency. However, these methods can be time-consuming and computationally complex due to multiple iterations and evaluations required. A T-S fuzzy method (Kuppusamy and Joo, 2019) is taken to modify sliding variable gains. Nonetheless, proper rules, membership functions, and training data set choices are required. Thus, the fourth goal is to design a sliding surface that can quickly and adequately calculate the sliding gains. Table 1 summarizes the related literature and the advantages of the proposed method.
comprehensive literature survey of SMC based LFC.
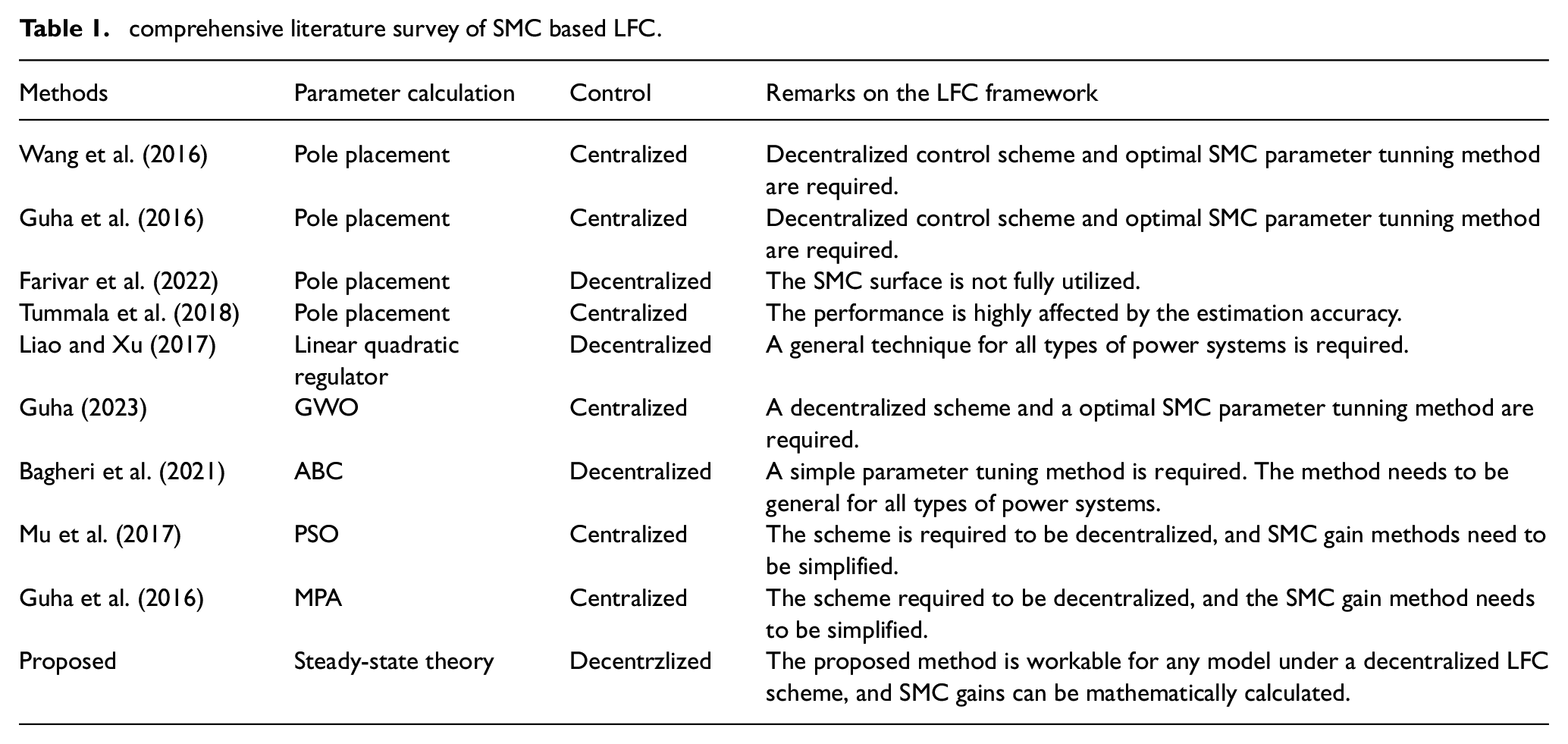
The summary of contributions in this work is as follows:
A method that is adaptable to any generator configuration within a decentralized LFC scheme is proposed.
A novel sliding surface is proposed to mitigate this dependence on estimation errors, thereby ensuring more reliable performance.
A novel combination of ADRC and ISMC theories is proposed to directly eliminate the influence of mismatched disturbances from the output channel, which presents a distinctive perspective compared to conventional DOB-ISMC methods.
A steady-state approach is employed to calculate sliding variables, which eliminates the need for laborious computational procedures.
A novel constant delay term is incorporated as a part of the input to enhance LFC transient performance.
The paper is structured as follows: First, an introduction is provided, which includes a description of the LFC power system model. Subsequently, the design procedures of the disturbance observer and a comprehensive explanation of the DOB-ISMC control scheme are presented. Extensive simulation results demonstrate the effectiveness of the proposed approach, which is further validated through a performance comparison with existing methods. Finally, a conclusion is provided.
Model of power system
The control architecture for a distinct region within a multiarea power system is illustrated in Figure 1. The dynamics of the
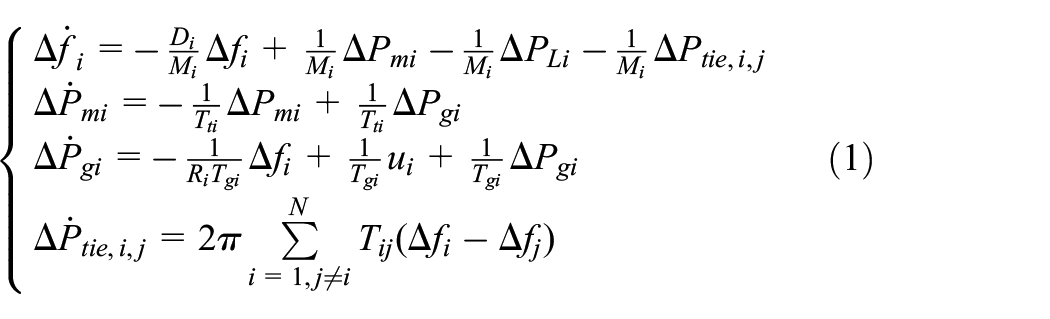
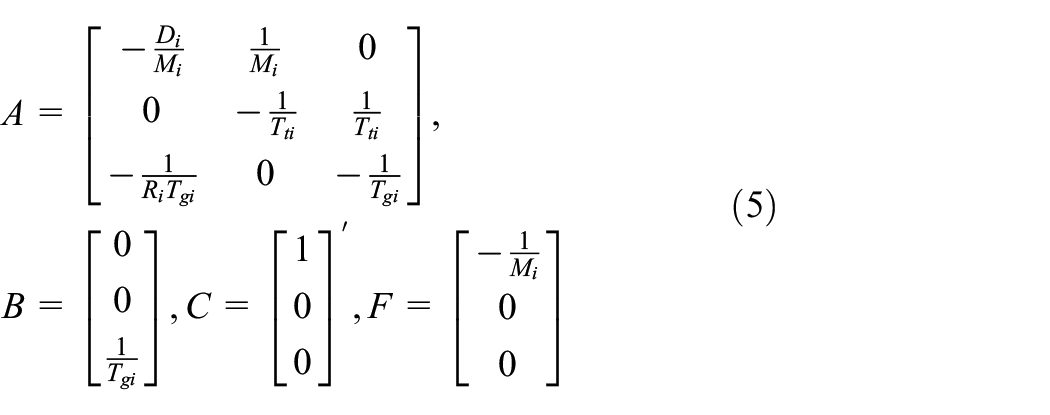
where

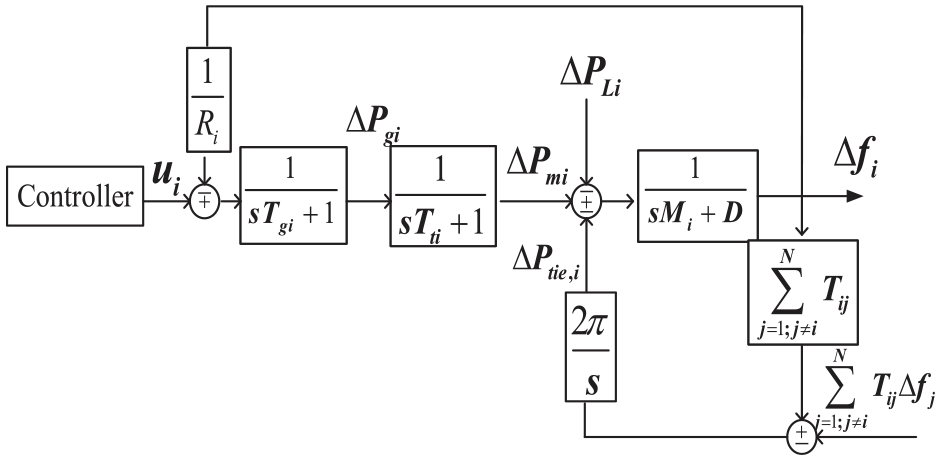
Structure of the controller of
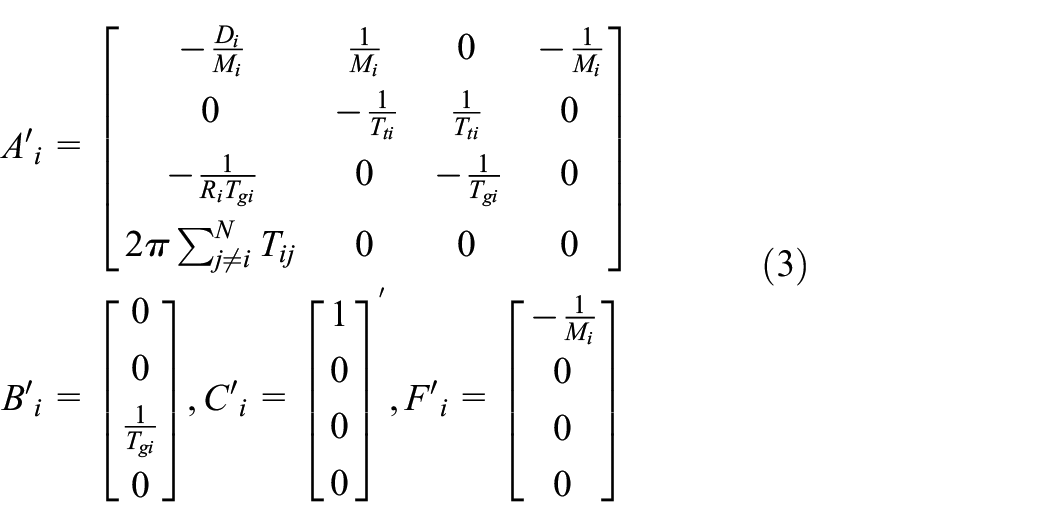
The corresponding matrices can be acquired as follows:
For decentralized control, the tie-line power is combined with other disturbances as

where
The decentralized LFC model is a single input and single output model, wherein a mismatched disturbance operates in a channel distinct from the control input. While mitigating the effects of mismatched disturbance with conventional DOB-ISMC methods is possible, rejecting it altogether is more difficult. Therefore, the control object is to design an approach that involves precisely estimating and ultimately eliminating the impact of mismatched disturbance.
The proposed DOB-ISMC LFC control scheme
Disturbance observer design
A nonlinear disturbance observer (Mi et al., 2016) is proposed to estimate the aggregated disturbance. In this paper, the

From equation (6), the disturbance observer matrix can be constructed as:

where
From equations (6) and (7), the error state values are defined as

The eigenvalues of matrix
Proposed sliding surface and input design
To achieve the disturbance rejection function, the memoryless disturbance observer–based feedback control signal is created as equation (9), which is the same as by Zhang et al. (2023).

The first term signifies the feedback control law designed to guarantee system convergence. The subsequent term constitutes the disturbance rejection component, where

where

To control the frequency, the input singnal is formulated as:

where

where
Upon the fulfillment of the switching condition
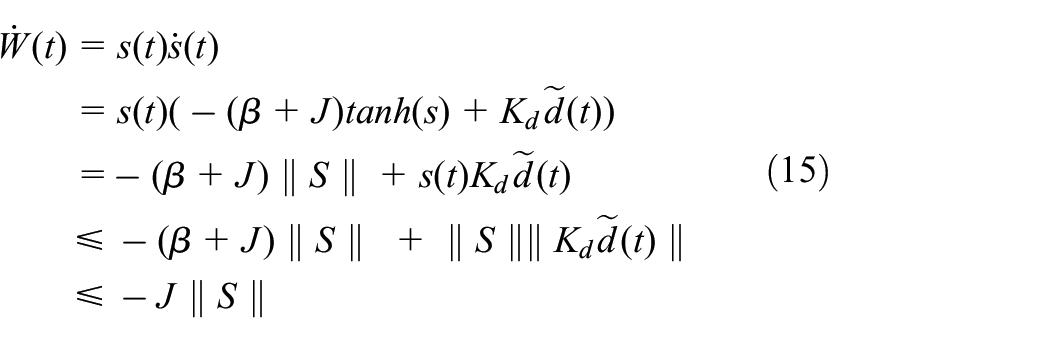
It is evident that Lyapunov stability, represented by
The proposed method introduces a novel constant delay to construct the control input. To ensure optimal LFC performance, the linear matrix inequality (LMI) technique is utilized to design the feedback control gain
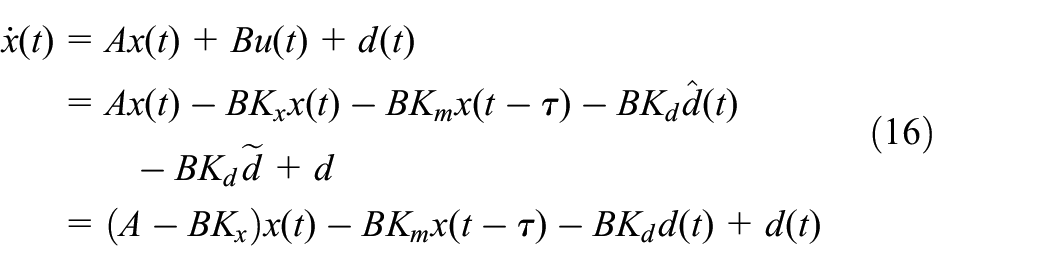
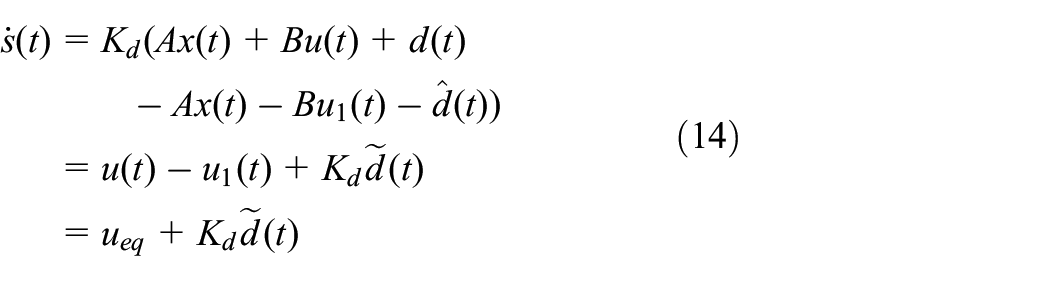
In equation (16), the disturbance is rejected by the
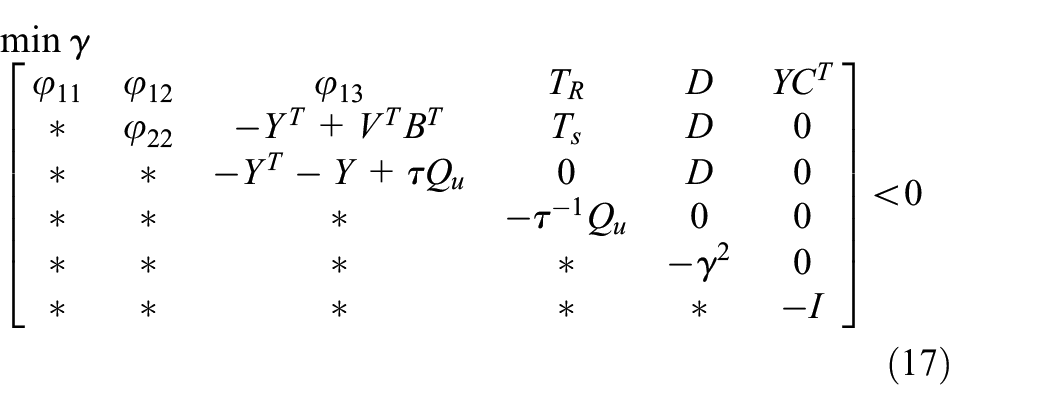
where
The corresponding controller parameters can then be obtained as:

and


where
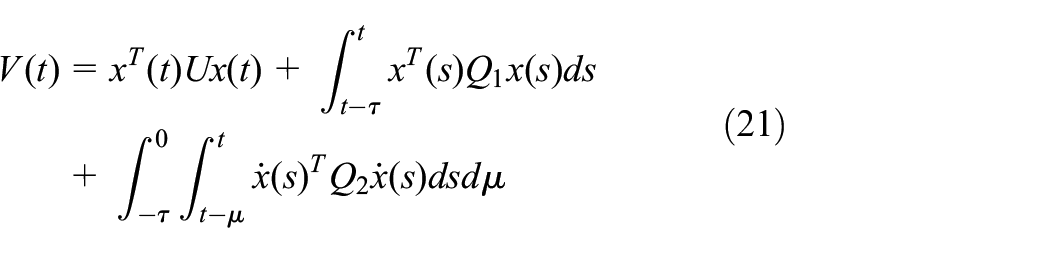
Take time derivative on equation (21), we get:
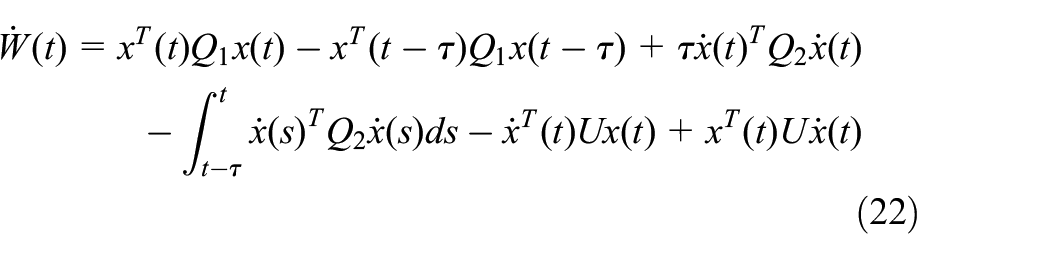
Now use the Newton–Leibniz formula (Wen et al., 2015)

By taking free-weight matrices, the following function can be constructed:

where
Selecting appropriate free-weight matrices

Let

where
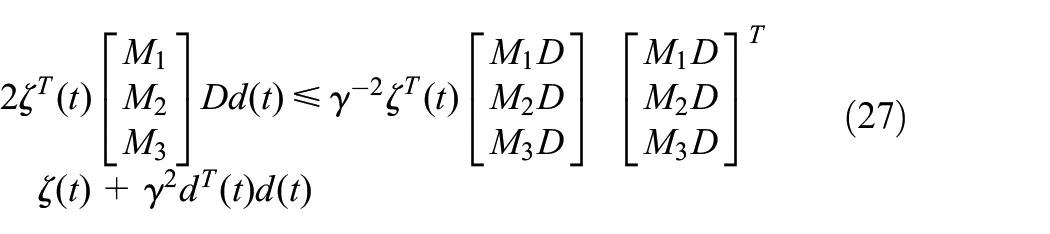
Combining equations (22), (23), and (27) yields:
where
Combining with equation (22), the H-∞ objective becomes now to ensure

The goal is to transform the inequality into an LMI structure to derive the controller parameters. The combined matrices can be expressed as:
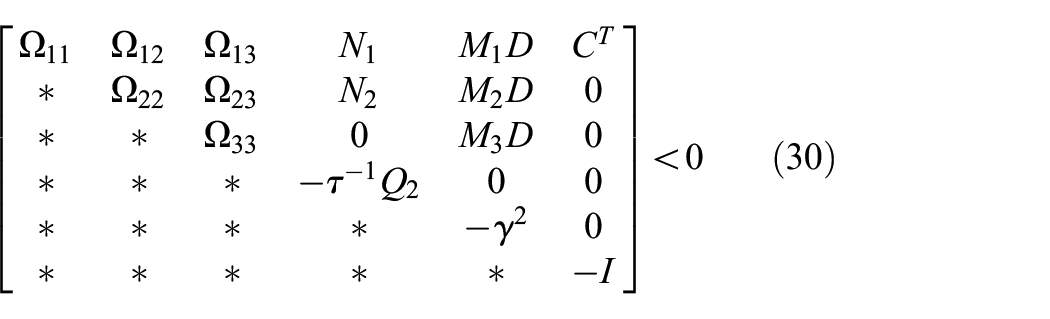
Assume
Disturbance rejection gain and sliding variable design
In the aforementioned section, the feedback control gain value

Simulation studies
Multiple test cases are designed to assess the LFC performance, taking into account governor deadband and generation rate constraints. In case 1, a standard IEEE 39 bus testbed is employed to evaluate the effectiveness of the novel memory-based control signal. In case 2, the LFC is validated on a three-area system. In case 3, a three-area system comprising various types of generators is employed. Four other methods are considered for comparison: Conventional PID method (Khousa and Ismail, 2013); liner active disturbance rejection method (LADRC) (Dorado-Rojas et al., 2019); disturbance observer–based integral sliding mode control (DOISMC) (Farivar et al., 2022); disturbance observer–based adaptive integral sliding mode control (DOAISMC) (Wang et al., 2016).
Case 1: IEEE 39 bus system
A standard IEEE 39-bus system is utilized to evaluate the performance of the memory-based control input in contrast to the method with memoryless control input proposed in the study (Zhang et al., 2023). The structure of the IEEE 39 testbed, as shown in Figure 2, utilizes parameters derived from Dorado-Rojas et al. (2019). Each area of the IEEE 39 bus testbed introduces a step load disturbance, as shown in Figure 3(a). Figure 3(b)–(d) demonstrate the performance comparison of the controller with one constant delay term. The results of three areas show that one delay constant term can highly improve LFC transient performance. The constant delay term can regulate the frequency with lower overshoot and smooth oscillation.
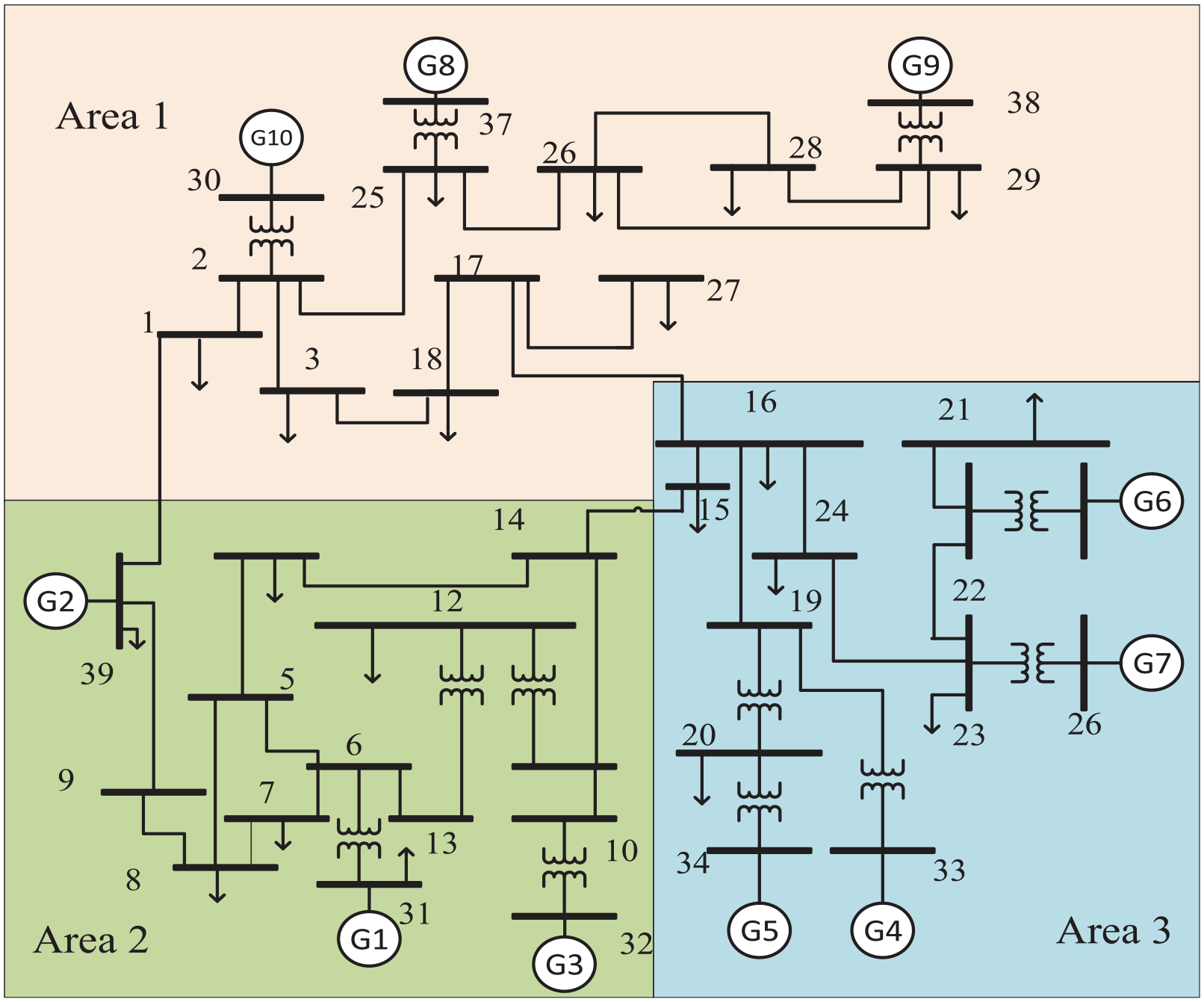
Structure of the IEEE 39 bus system.
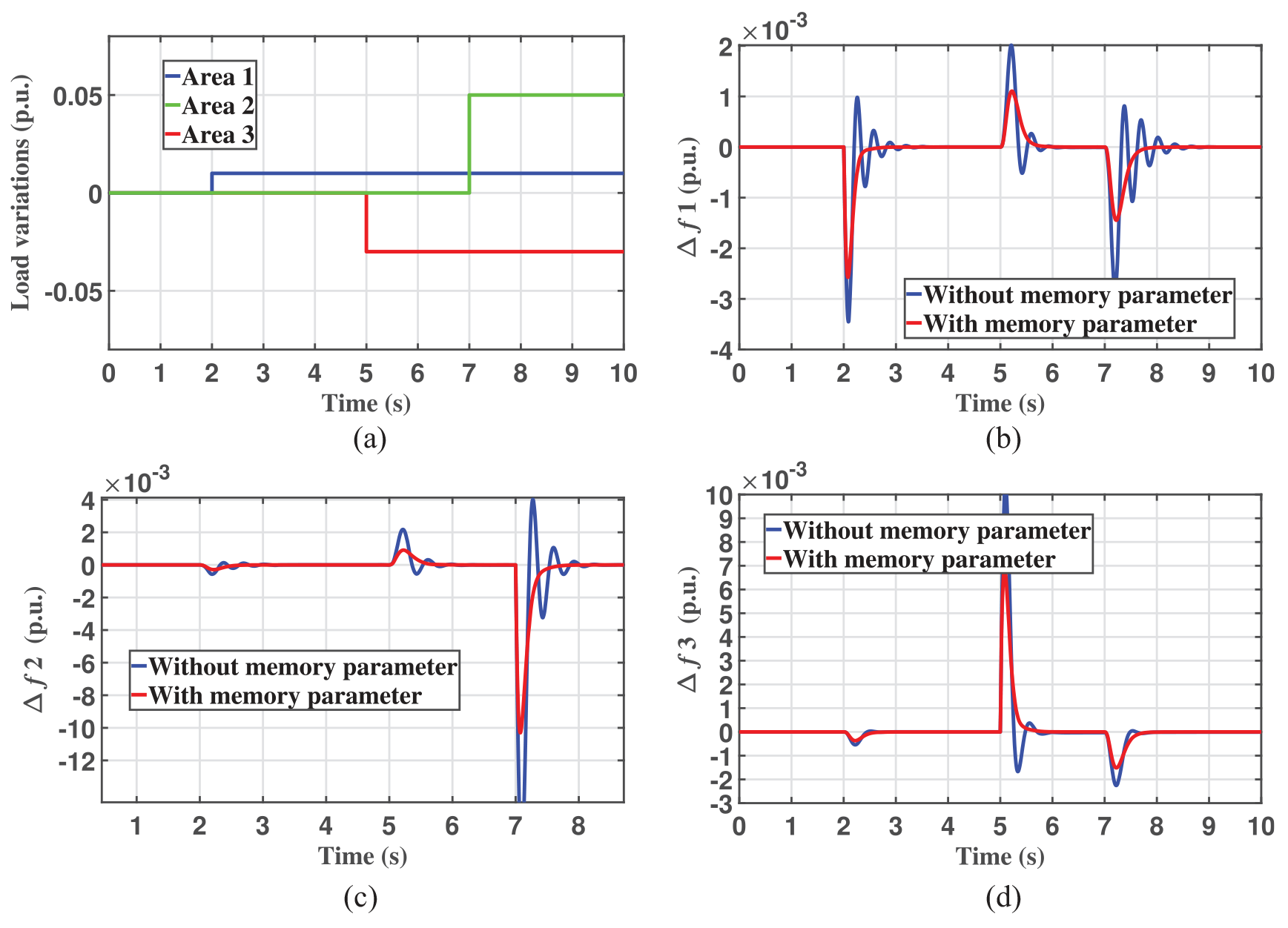
Load variations and dynamic performance of frequency regulation: (a) load variations in three areas, (b) LFC performance of area 1, (c) LFC performance of area 2, and (d) LFC performance of area 3.
Case 2: Single-area power system
Letting
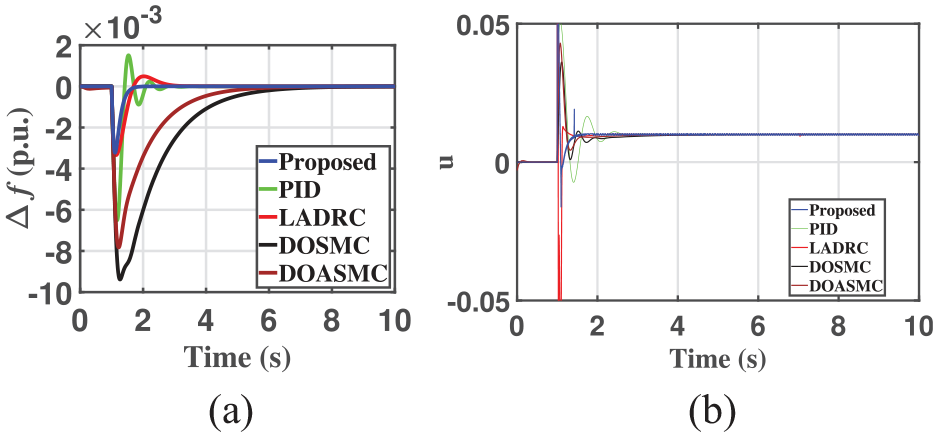
(a) Dynamic performance of LFC in a single area and (b) control signal.
Transient performance.
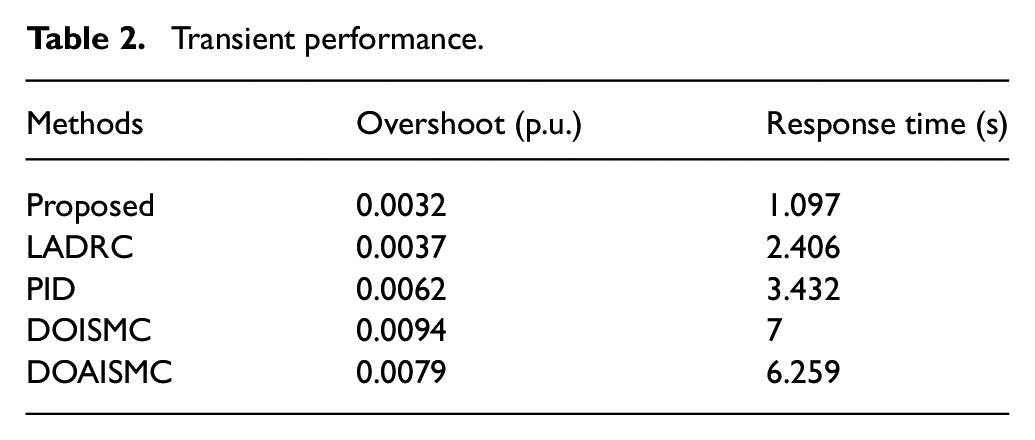
Figure 5 presents the disturbance estimated error and the dynamic performance with different parameters for the disturbance observer. Three sets of parameters are used to allocate the eigenvalue value of matrices
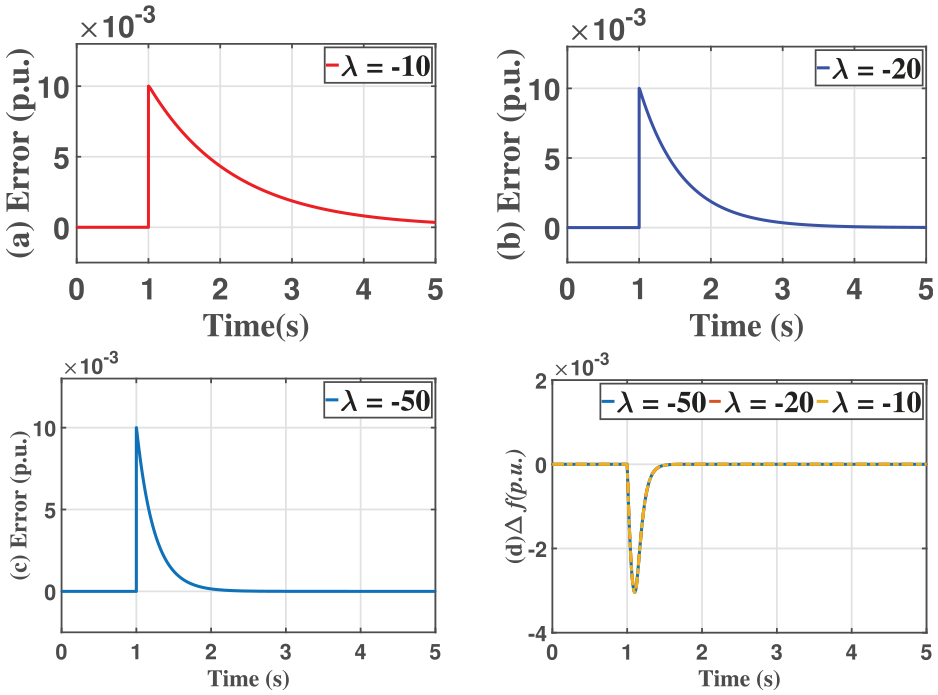
Dynamic performance of the disturbance observer and proposed control method with different disturbance observer poles.
Case 3: Three-area interconnected power system
The power system model in this case is built based on other literature, for example, Cai et al. (2016) and Oshnoei et al. (2021). The three-area LFC structure, depicted in Figure 6, is employed to validate its adaptability to a more complex power system. To replicate a more intricate setting, a third area is introduced into the system, incorporating a reheat turbine. The transfer function of the reheat turbine is constructed as follows (Oshnoei et al., 2021),

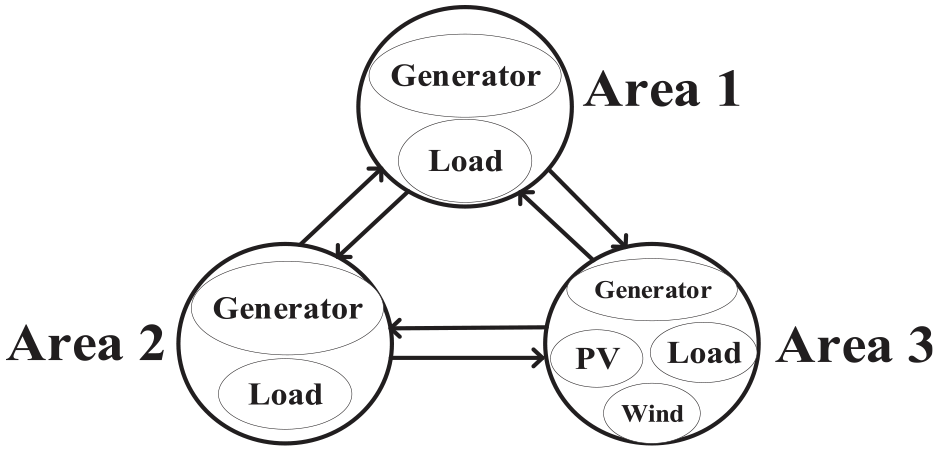
Structure of the studied three-area power system.
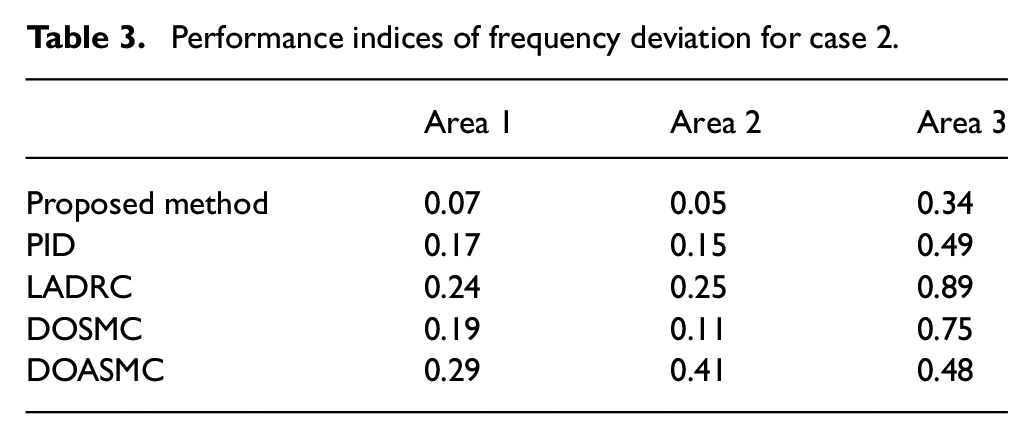
Figure 7(a) illustrates the scenario in which five sequential step load variations are introduced to both area 1 and area 2. In addition, a random renewable power is introduced in area 3. The system performance in three areas with different methods is demonstrated in Figure 7(b)–(d). To quantitatively compare the results of the five methods, the integral of absolute error (IAE), which represents the accumulated frequency deviation over time, is taken as the performance index to compare the results, as shown in Table 3. The superiority of the proposed method over the other three approaches is apparent, as illustrated in Table 3.
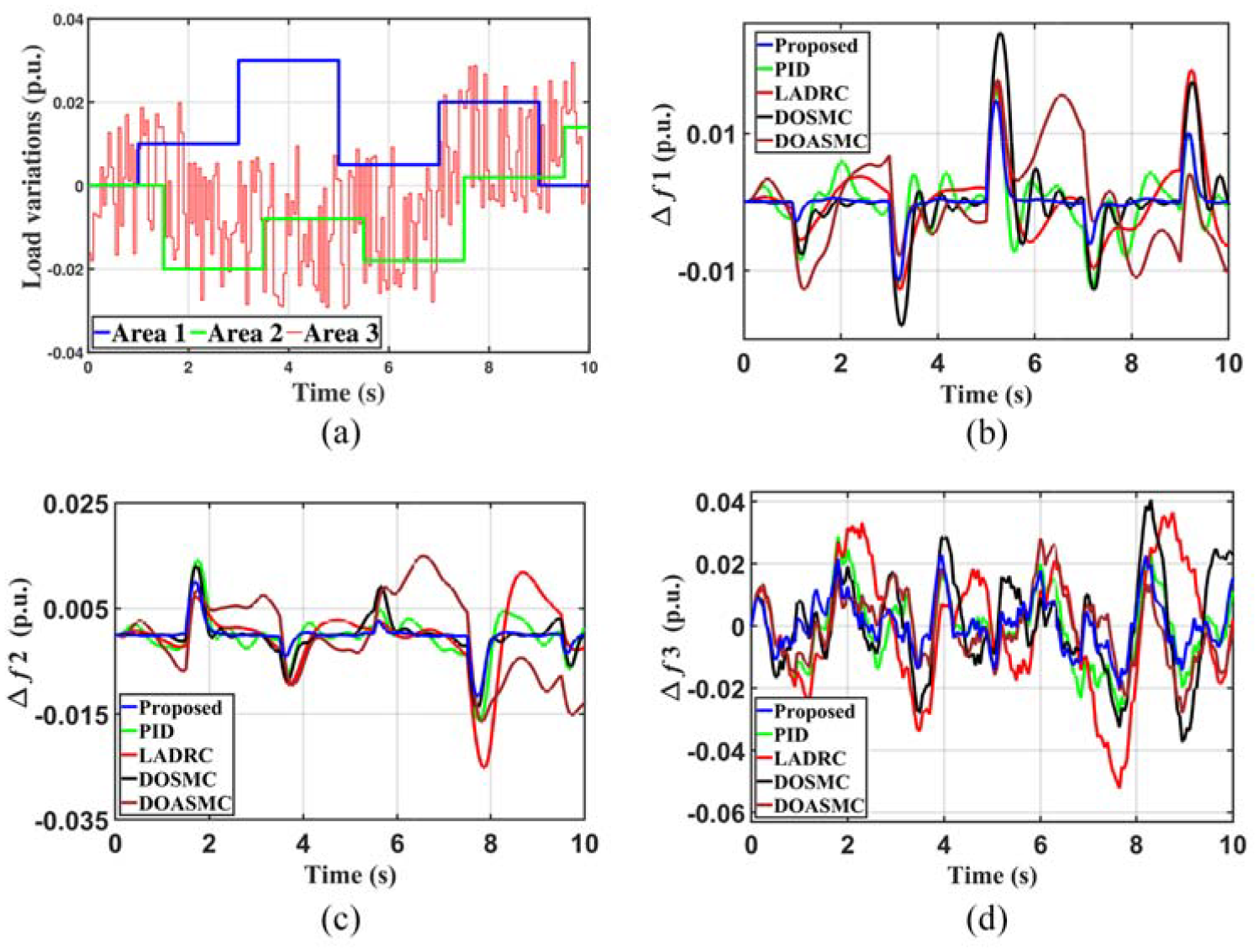
Load variations and dynamic performance of frequency deviation: (a) lumped disturbance in area 3, (b) LFC performance of area 1, (c) LFC performance of area 2, and (d) LFC performance of area 3.
Performance indices of frequency deviation for case 2.
Conclusion
A novel DOB-ISMC LFC is proposed to regulate frequency. The results demonstrate effective frequency regulation with reduced dependence on the disturbance observer. The steady-state theory simplifies the parameter tuning process. Moreover, the inclusion of a memory-based control input term in comparison to a memoryless input significantly improves the transient performance of LFC. Through extensive case studies, the DOB-ISMC LFC method presented in this study offers a promising solution for stabilizing power systems, effectively regulating frequency, and improving transient performance. The findings of this research contribute to the advancement of LFC techniques and provide valuable insights for power system engineers and researchers working toward the reliable and efficient operation of power grids. However, there are limitations to the proposed method. First, the proposed SMC reaching law causes high chattering problems. Second, practical LFC in power systems typically involves sample-based control. Consequently, the proposed method may not be applicable to discrete systems, particularly when the sampling interval is large. As a future step, there is a need to extend the proposed method to accommodate a sample-based LFC model, addressing the practical considerations of discrete systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.