
Abstract
This paper studies the synchronization of fractional-order chaotic systems in the presence of unknown external disturbances. A new disturbance identification method using fractional-order algebraic identification is proposed to handle unknown disturbances. In order to guarantee system stability, the nonlinear state-feedback controller is designed based on the Lyapunov theory. All system parameters and orders, as well as the external disturbances, are considered time-varying in this paper. The simulation results show that the estimation of unknown disturbance is executed more quickly and accurately using the proposed method, which also leads to fast and precise synchronization of the chaotic systems. A circuit implementation is also performed to identify the unknown disturbances in a fractional-order electronic chaotic oscillator system to evaluate the practicability of the proposed approach.
Introduction
Over the past decades, fractional-order calculus has played an undeniable role in a wide range of scientific and industrial processes. It is an extension of an integer-order calculus that is more powerful and more accurate. Recently, fractional-order calculus has been widely employed to study the anomalous behavior of dynamical systems in chaotic systems. The first serious discussion of fractional-order calculus in chaotic systems was conducted by Grigorenko in 2003, which led to the introduction of many fractional-order chaotic (FOC) systems such as fractional-order Lorenz system (Wu and Shen, 2009), fractional-order Duffing system (Ge and Ou, 2007), fractional-order Chua’s system (Aghababa, 2018), and fractional-order Liu system (Hegazi et al., 2013).
Synchronization of the FOC systems is a challenging task that has attracted great attention due to its potential applications in various fields of science and engineering such as coupled laser systems in nonlinear optics and secure communication (Li and Wu, 2019; Sayed and Radwan, 2020; Xu et al., 2022; Yang et al., 2020), power converters, and chemical reactions (Mofid et al., 2019). In the literature, several effective methods have been introduced to achieve chaos synchronization such as sliding mode control (Razzaghian et al., 2021), active control (Bagheri and Ozgoli, 2016; Tang, 2014), backstepping control (Shukla and Sharma, 2017), linear matrix inequality (LMI) technique (Pourgholi and Boroujeni, 2016), and fuzzy approach (Chen et al., 2013).
Most of these methods for the synchronization of FOC systems mainly do not consider the external disturbances and uncertainties, which cannot be neglected in practical applications. Engineering processes are often associated with unknown external disturbances that affect the behavior of the systems, especially chaos synchronization behavior and degrade the stability and performance of real systems. Therefore, significant efforts have been accomplished to investigate in this regard by researchers. For example, in Munoz-Vazquez et al. (2021), a high-gain fractional smooth proportional–integral (PI)-like disturbance observer based on a state-feedback controller is proposed to observe continuous but not necessarily differentiable disturbances. In Chen et al. (2012), disturbance observer–based robust synchronization control of uncertain chaotic systems has been studied. In Chen et al. (2016), observer-based synchronization of FOC has been introduced. In Martínez-Guerra et al. (2022) and Martínez-Fuentes and Martínez-Guerra (2019), a globally Mittag–Leffler observer is designed for nonlinear fractional-order systems. In Martínez-Fuentes et al. (2022), generalized synchronization of commensurate FOC systems considering a class of chaotic nonlinear fractional systems of commensurate order called Liouvillian’s systems is done. Shao et al. (2016) designed a sliding mode synchronization controller based on the nonlinear fractional-order disturbance observer (FODO) to synchronize the fractional-order jerk systems in the presence of unknown bounded disturbances. In Chen et al. (2016), the FODO was proposed using the integer-order design approach in the synchronization control for a class of fractional-order nonlinear systems. In Modiri and Mobayen (2020), an adaptive sliding mode control technique was proposed to synchronize the FOC systems with external disturbances. A disturbance observer–based semi-globally robust synchronizer for a chaotic system using sliding mode control was designed in Mofid et al. (2021).
Most of the mentioned above were established using a sliding mode control approach to handle the external disturbance. With the increasing need for fast synchronization in the presence of disturbance, the demand for more appropriate approaches to estimating disturbance has dramatically risen. However, most of the chaos synchronization studies have been examined under some special conditions, time-invariant orders, parameters, and bounded disturbances. It is clear that the behavior of the FOC systems is very sensitive and dependent on initial conditions, fractional orders, and parameters. Consequently, the synchronization of FOC systems in the presence of an unknown external disturbance becomes more challenging in the event that the orders and parameters change in the time domain. Therefore, this paper focuses on the synchronization of the FOC systems with time-varying parameters and orders in the presence of time-varying external disturbances.
In this paper, a new disturbance estimation method using algebraic identification is proposed for fast synchronization of the FOC systems. To the best of the authors’ knowledge, no efforts have been made to design an algebraic disturbance observer method for synchronization of the disturbed FOC systems. Based on the proposed disturbance observer, nonlinear feedback control is developed to synchronize the FOC systems. Using the proposed method, the estimation of unknown disturbance is executed more quickly and accurately, which also leads to fast and precise synchronization of the chaotic systems. Also, applying the Lyapunov stability concept, the presented control method satisfies that the states of the fractional-order master and slave chaotic systems are synchronized quickly. One of the main contributions of this paper is that the proposed technique is efficient for the FOC systems with the parameters, orders, and disturbances that are all time-varying. A circuit implementation is also performed to identify the unknown disturbances and synchronize the FOC systems to evaluate the practicability of the proposed approach. In this paper, system orders are assumed to be fractional and time-varying, which leads to a further decrease in synchronization rate. Also, note that the chaotic electronic oscillator generally has a relatively lower synchronization rate than other systems. In practical examples, system parameters are considered variable time.
In general, the contributions of this paper are listed as follows:
A new fast fractional-order algebraic method is investigated for the identification process.
A new control method is designed for variable orders and parameters of fractional-order systems in the presence of unknown external disturbance.
A new stability analysis is done to achieve synchronization in the switching conditions.
A new method for practical implementation of fractional-order dynamics is introduced.
The rest of this paper’s structure is organized as follows. Section “System description” describes the preliminaries and important definitions of fractional calculus along with the considered system model. Section “Proposed method” presents the proposed approach in detail. Section “Simulation and experimental results” provides the circuit implementation and experimental results. Finally, the paper is concluded in section “Conclusion.”
System description
This section presents some preliminary definitions of fractional-order calculus and the structure of fractional-order electrical chaotic oscillators.
Preliminaries on fractional calculus
The major definitions of fractional calculus are Grunwald–Letnikov, Riemann–Liouville, and Caputo. The Caputo definition of fractional-order derivate of a continuous function

where

Consider the following dynamical system

where

where


where

where


System model
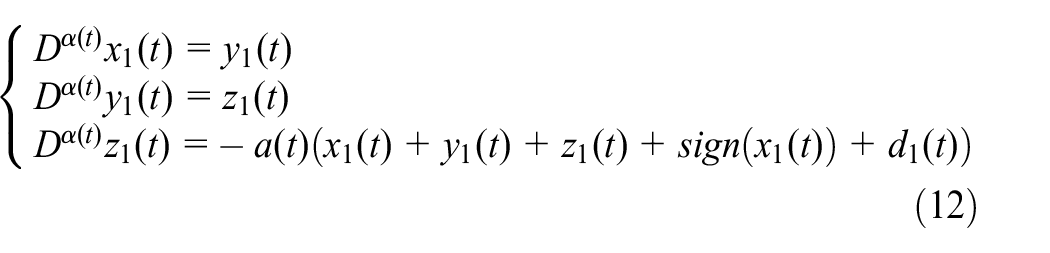
The used system to implement the proposed method in this paper is fractional-order electronic chaotic oscillator (ECO) introduced in Ahmad and Sprott (2003). ECO is one of the well-known FOC systems that is defined as follows

It was proven that the chaotic behavior of the system (11) occurred when
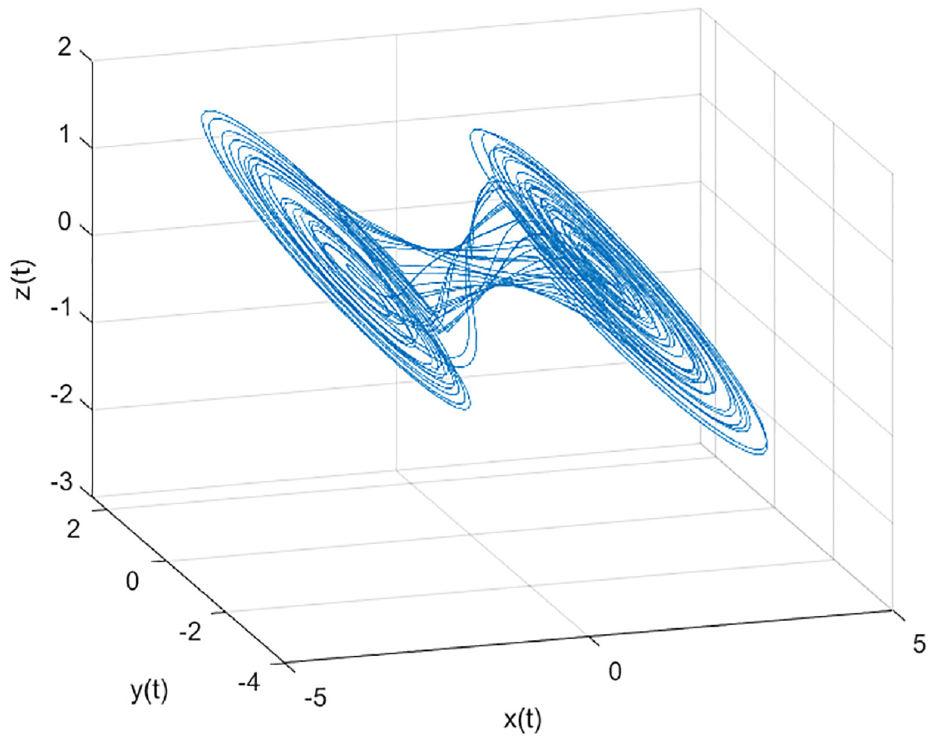
Chaotic behavior of fractional-order ECO system.
Proposed method
Figure 2 demonstrates the block diagram of the proposed method for synchronizing the time-varying fractional-order ECO systems in the presence of the external disturbance. The synchronization is based on a drive system and a response system, which are known as the master system and slave system, respectively. The disturbance identifier analyzes the effect of external disturbance d entered into the master system by sampling its states and then provides an estimate of the disturbance through the algebraic method. The estimation of disturbance d, denoted by
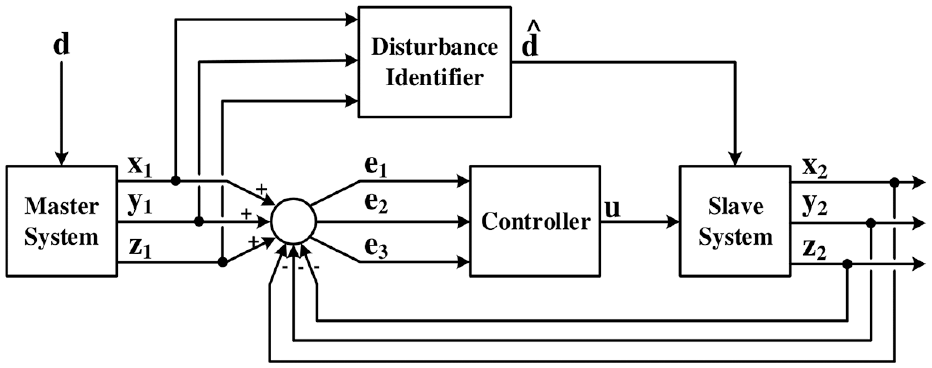
Block diagram of the proposed method for synchronization of fractional-order chaotic systems.
Fractional-order algebraic identification of unknown disturbance
In this section, the identification of unknown external disturbance in a fractional-order ECO system is examined using the fractional algebraic method. Like any parameter identification approach, the algebraic identification method also requires relatively accurate knowledge of the system model. In other words, the system parameters must be available except for the ones that need to be identified. The algebraic identification method is based on a system model that is executed to achieve an accurate and static formula for unknown parameters. The formulas for estimating the parameters are based on measurable quantities, such as inputs and outputs, which are obtained through algebraic manipulations in the model equations (Mojallizadeh and Badamchizadeh, 2016). Unlike the asymptotic observers, the algebraic estimators do not rely on asymptotic convergence arguments and Lyapunov stability theory, which simplifies its design and lets this approach become more interesting for many applications (Mojallizadeh and Badamchizadeh, 2016).
Define the fractional-order ECO chaotic with an external disturbance as
where

By multiplying two sides to
Then, integrating both sides of equation (14) leads to
Now, using Corollary 2, we have
By sorting equation (16), the following relation is obtained
and

By replacing equation (18) in equation (17), the algebraic formula is achieved
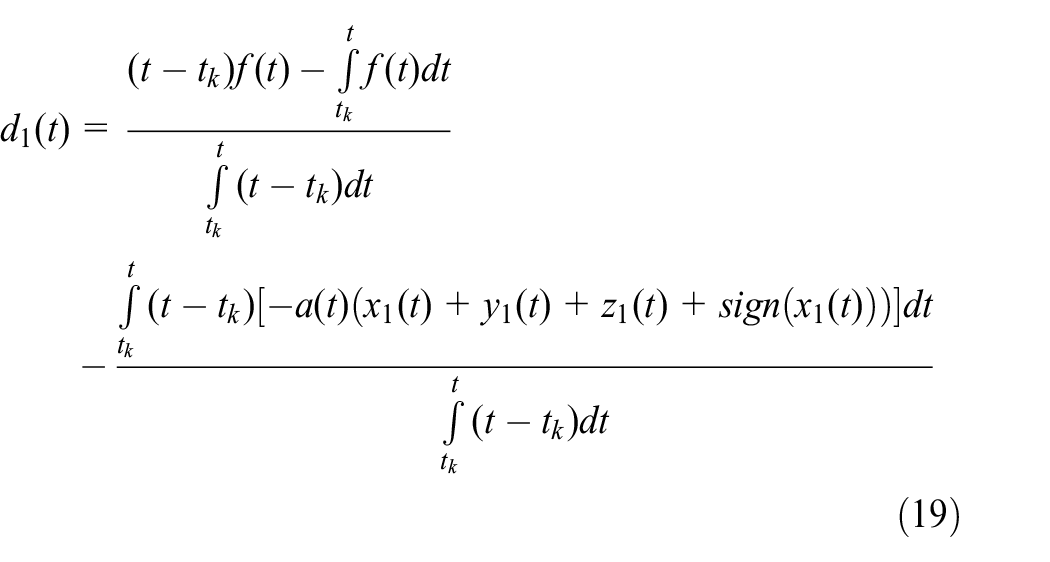
The estimation formula in equation (19) requires a repetitive resetting of the parameters at the end of the updating interval because the unknown parameters may change at the end of the parameter updating interval (

It is concluded that the disturbance of the system can be estimated by the fractional-order algebraic identification method.
Synchronization of fractional-order ECO with unknown disturbances
For synchronization of the fractional-order ECO system with time-varying disturbance, equation (12) is considered as the master system, and the following fractional-order ECO system is considered as a slave system
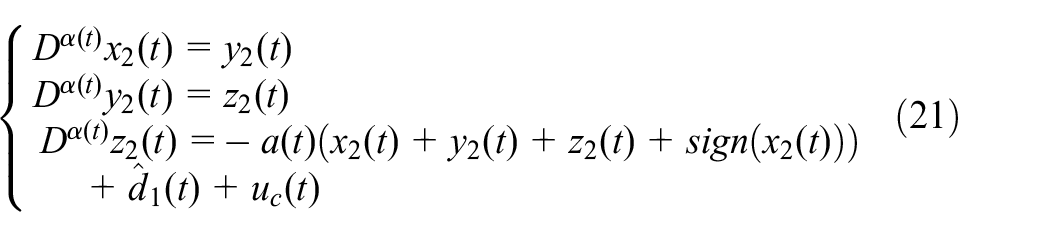
where
Let the synchronous errors be defined as
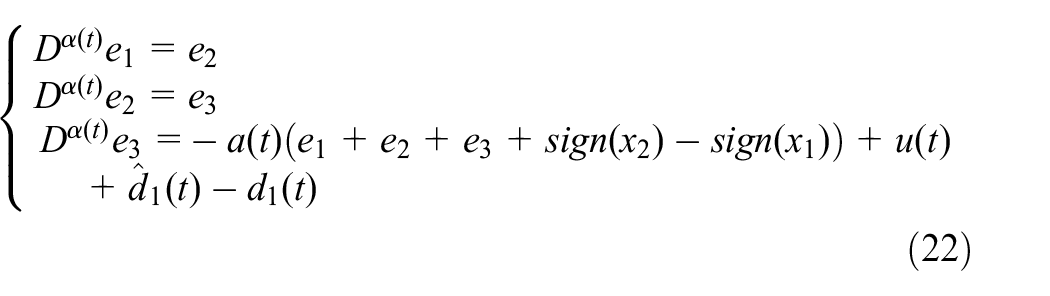
Parameters

where

leads to
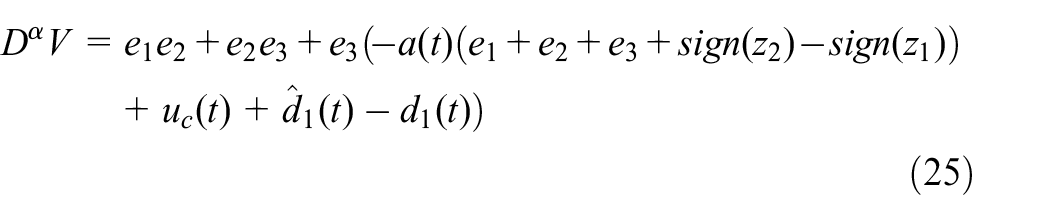
According to Lemma 2, we have

Therefore, the

so it can be concluded for
Simulation and experimental results
In this section, the numerical simulation is first carried out to demonstrate the effectiveness of the proposed approach. Then, the practical implementation is performed to examine the performance of the proposed method for estimating the disturbance and synchronization of the ECO system.
Based on the fractional-order ECO system (12), the time-varying parameter and order are considered as follows


where

Also, the standing time and updating interval for the identification algorithm is considered as
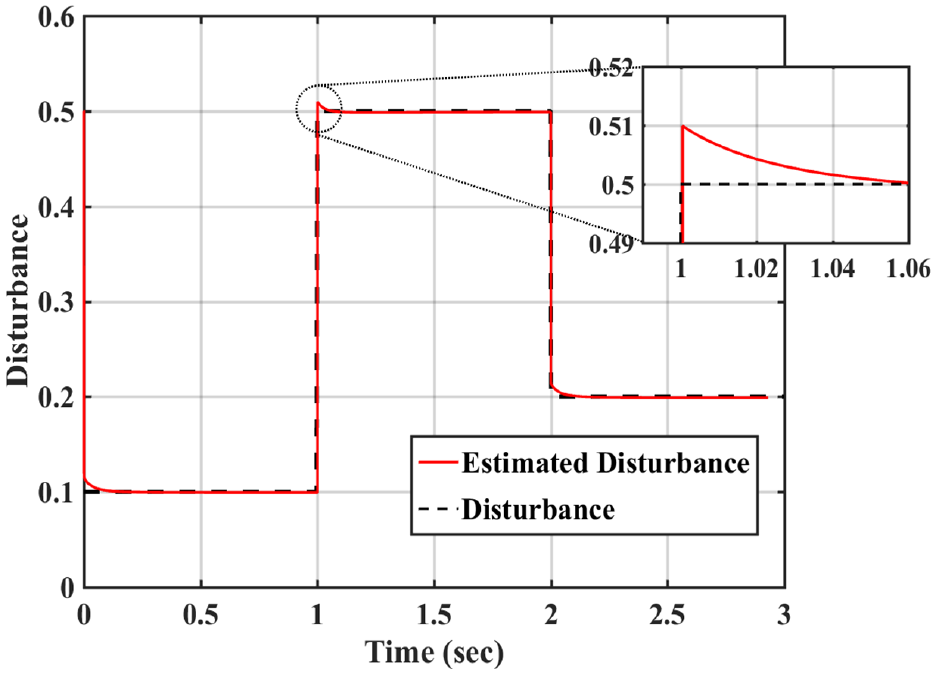
Identification of time-varying disturbance of system (12).
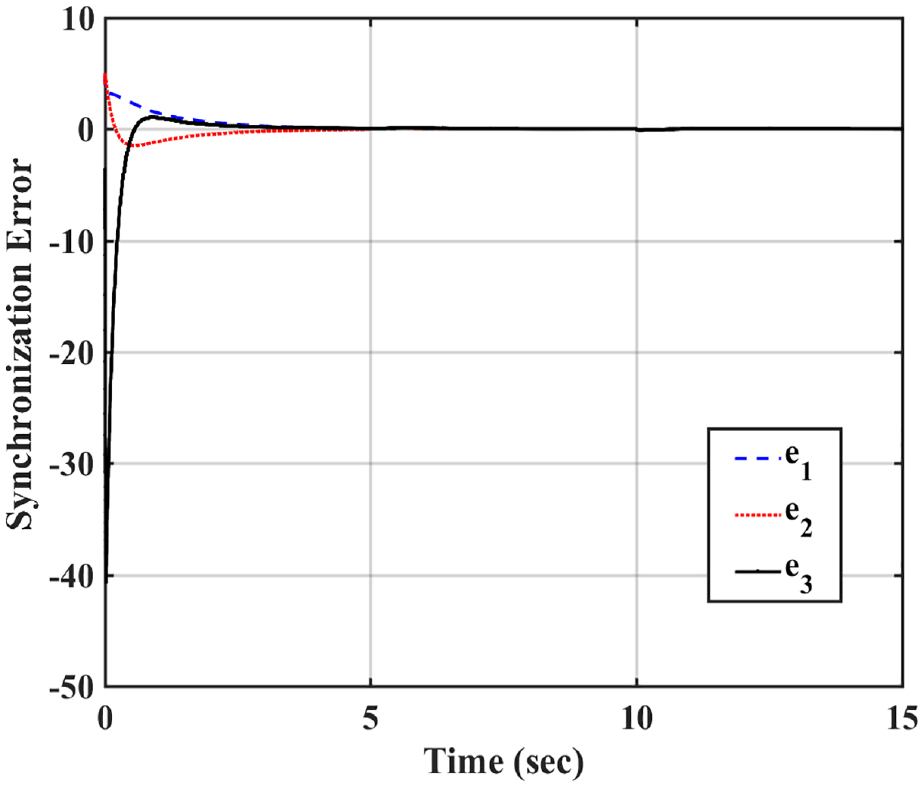
Synchronization errors for ECO systems with disturbances.
The circuits of the fractional-order ECO system and disturbance identification are designed to verify the simulation results. Then, the implemented circuits are practically set to report the experimental results. According to the model description in equation (12), the block diagram of the fractional-order ECO can be depicted as Figure 5, in which an unknown external disturbance is applied to the third state. The illustrated block diagram is implemented as the circuit shown in Figure 6 according to the parameter and order equations. In this paper, the discretization method for the fractional derivative is the Adams–Bashforth–Moulton algorithm (Diethelm and Ford, 2004). Operational amplifiers are employed to realize the fractional derivative as well as generate the sign function. The capacitive network is controlled with the switch elements to consider the variability with time in the fractional orders. Also, the potansiyometre changes at specific times to vary the parameter values. The node marked with the letter A in the circuit is the third state in which external disturbance is applied.
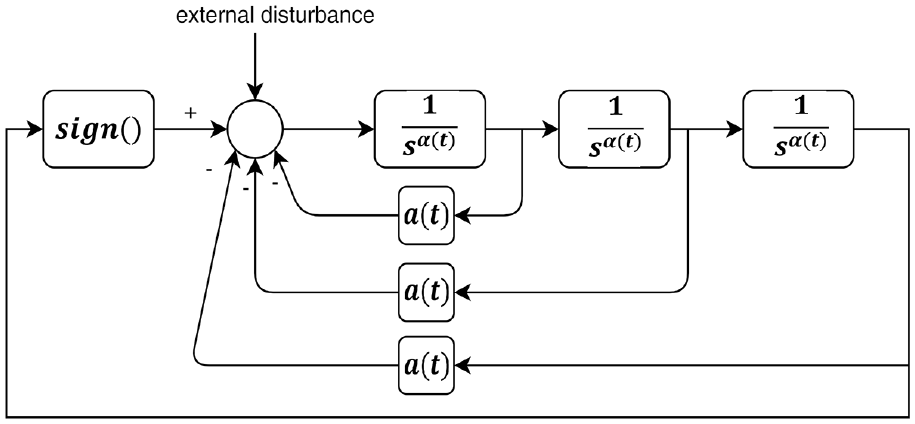
Block diagram of fractional-order ECO system with external disturbance.
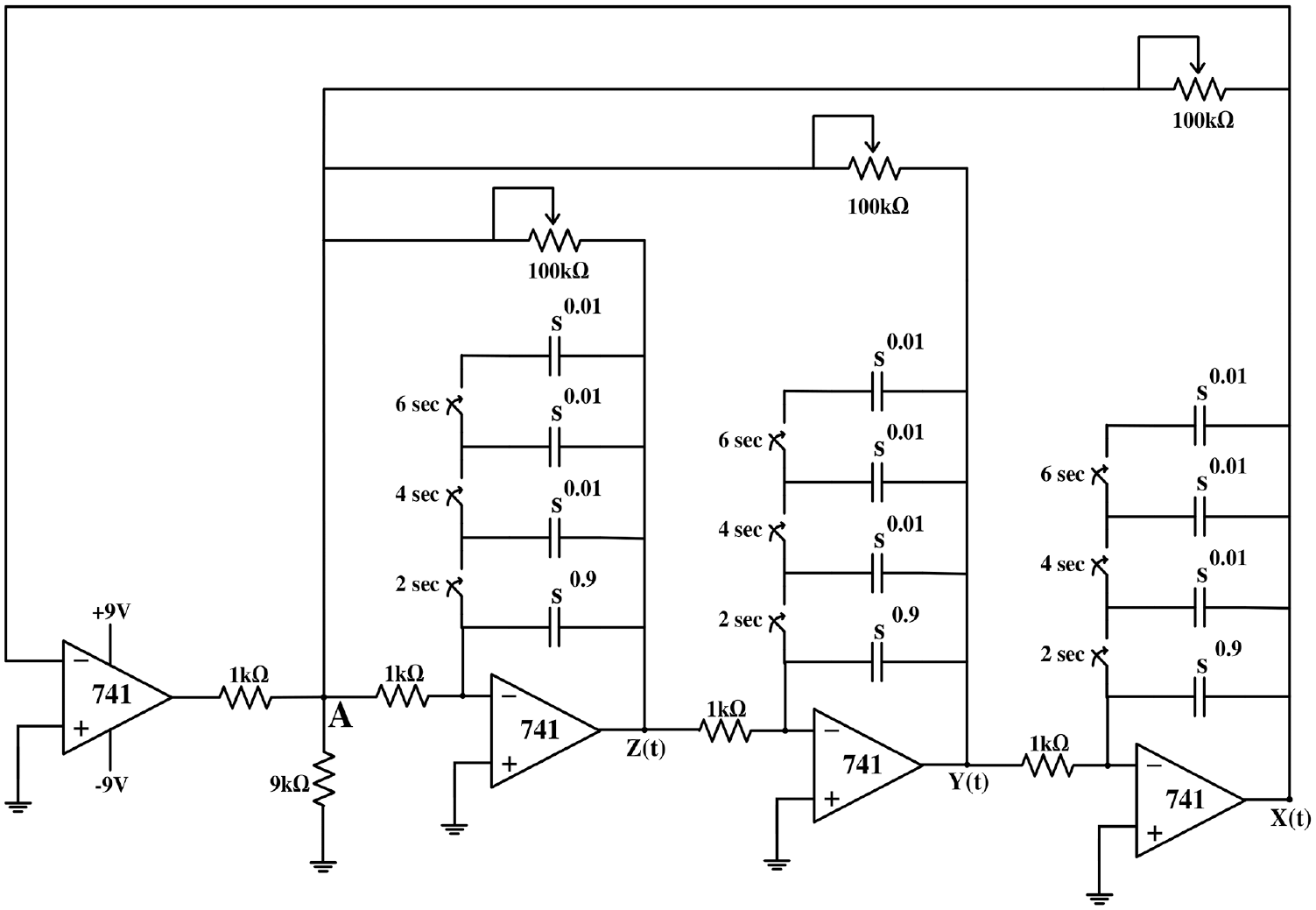
Circuit implementation of a fractional-order ECO system with time-varying parameters and orders.
With respect to the calculated equation (20), a circuit as the form of Figure 7 is designed to identify the unknown disturbance signal where

Operational amplifiers are used to provide the integrator, derivative, and logarithm functions.
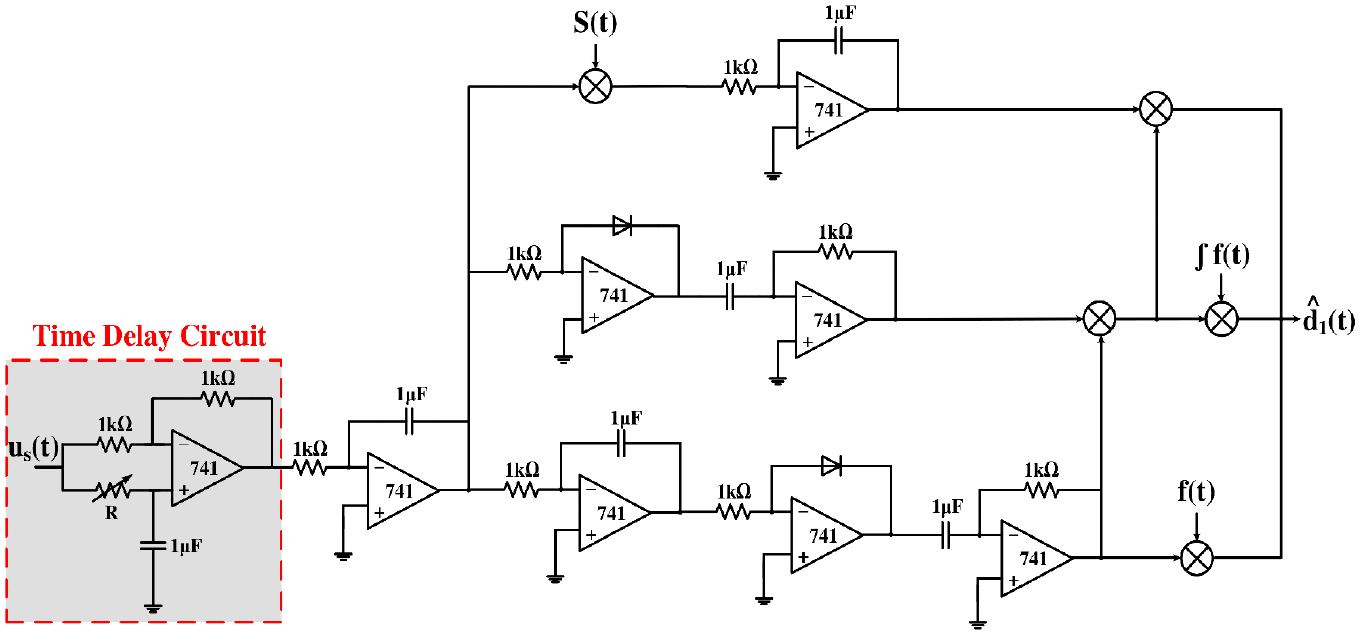
Circuit implementation of estimating unknown disturbance via algebraic identification.
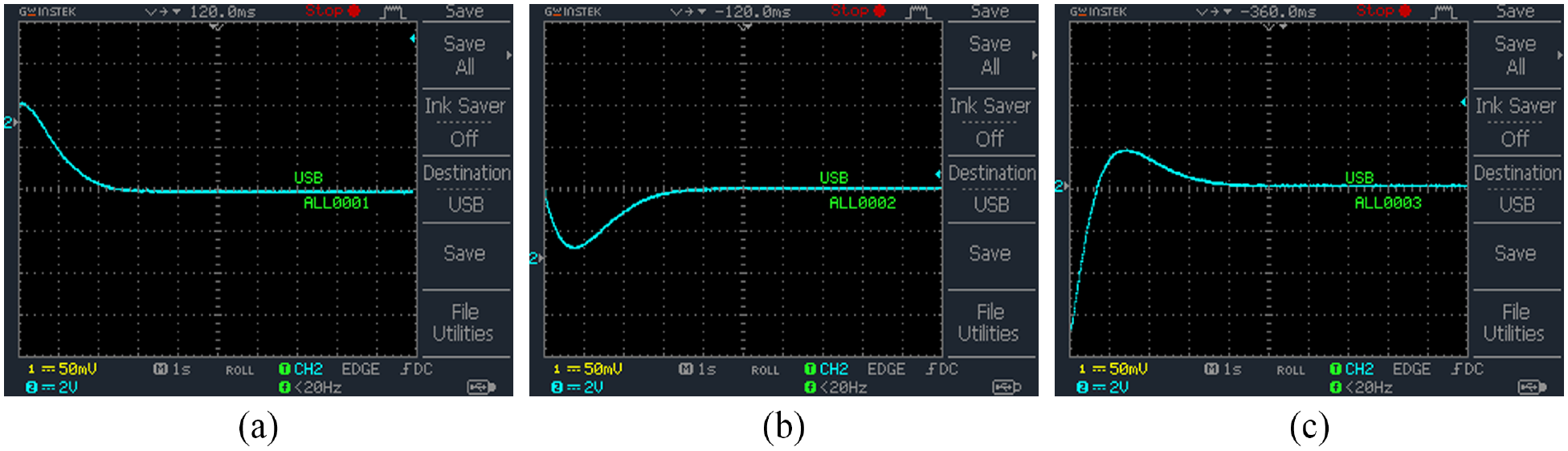
The practical results of the chaotic behavior of the fractional-order ECO system are illustrated in Figure 8. Also, the chaotic states of the ECO system (11) are shown in Figure 9. The experimental result of identification of the unknown disturbance is shown in Figure 10, which indicates that the identification of the disturbances is performed with high speed and accuracy. The experimental synchronization errors of the considered ECO systems are illustrated in Figure 11, which shows that the synchronization is performed in a short time. As seen, the experimental results are compatible with the simulation results, which prove the feasibility and efficiency of the proposed approach.
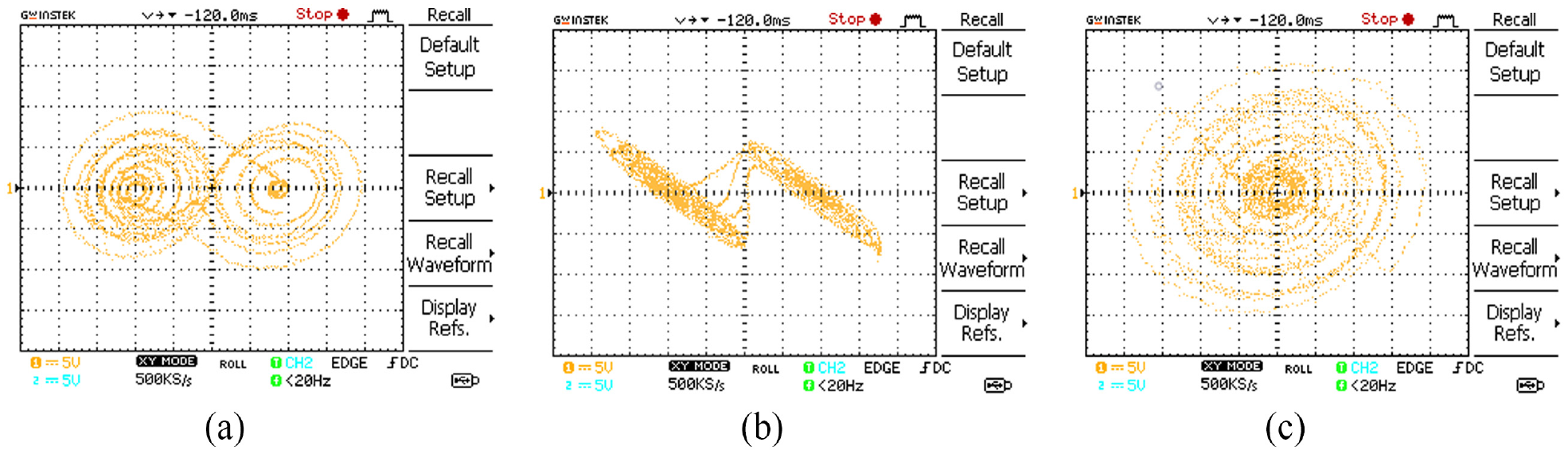
Chaotic behavior of fractional ECO system: (a) channel 1: x, channel 2: y, (b) channel 1: x, channel 2: z, and (c) channel 1: y, channel 2: z.
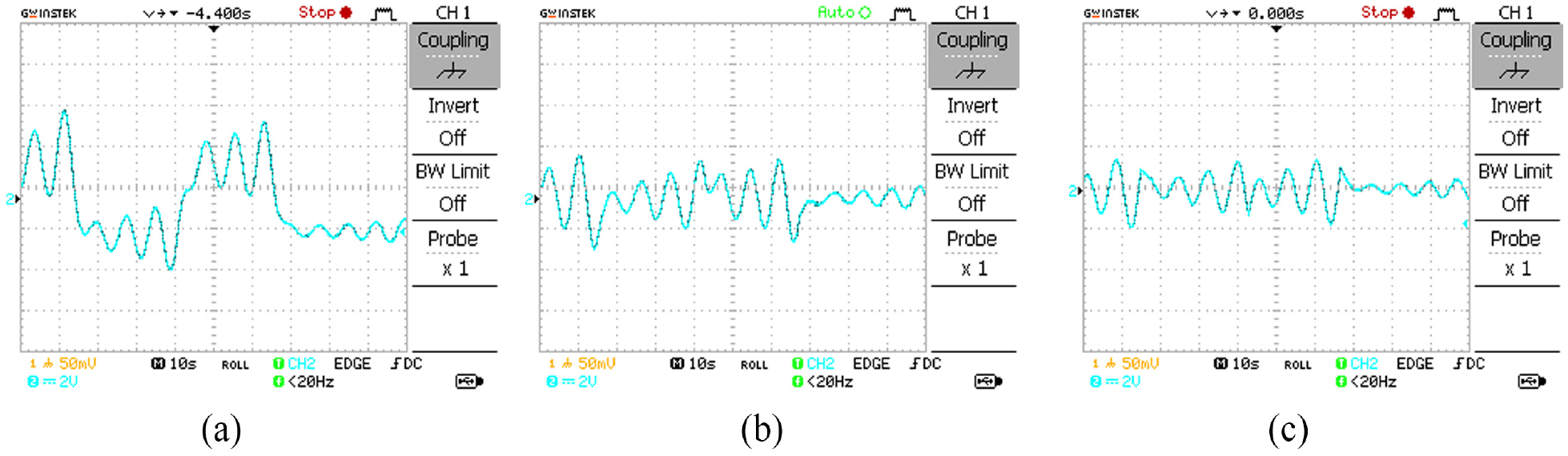
Chaotic states of fractional ECO system: (a): x, (b): y, and (c): z.
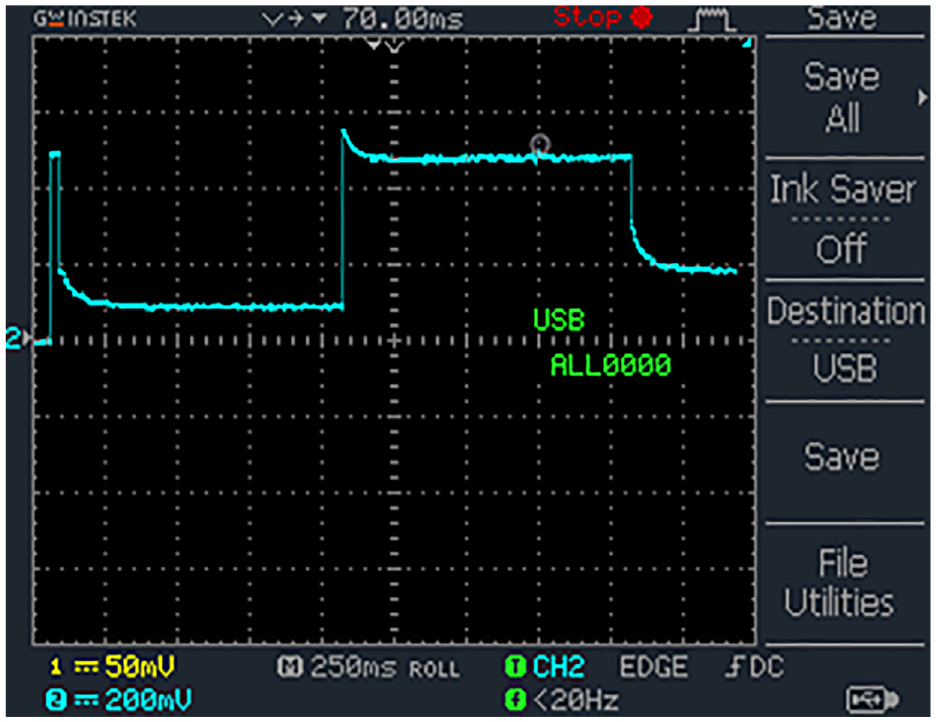
Experimental result of identification of unknown disturbance
Experimental synchronization errors of two fractional-order ECO systems: (a):
For comparison, we use the identification method by Behinfaraz et al. (2016). In this method, a recursive least square approach has been designed for identification. For system (12), a disturbance is selected as follows

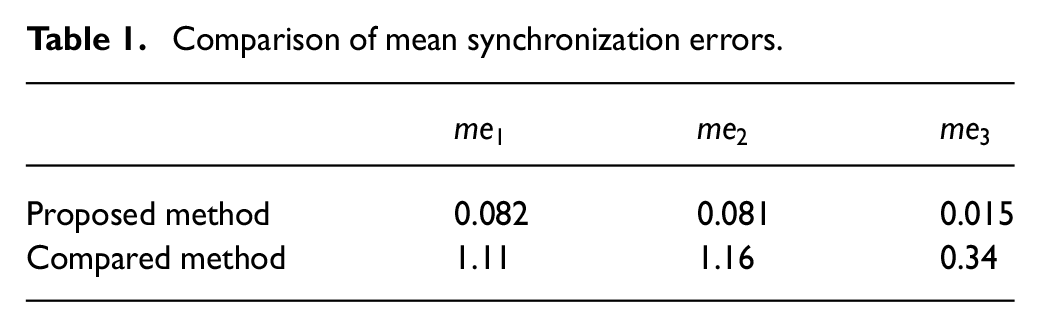
Results of identification with the mentioned method and the proposed method in this paper are shown in Figure 12. As seen in this figure, the compared method cannot overcome the time variations, but the proposed method in this paper has a good performance in this condition. Synchronization errors with the compared method are shown in Figure 13 which verify that inappropriate identification of unknown disturbance destroys the synchronization process. For statistical comparison, we calculate the following mean error in each state

where T is the simulation time, and
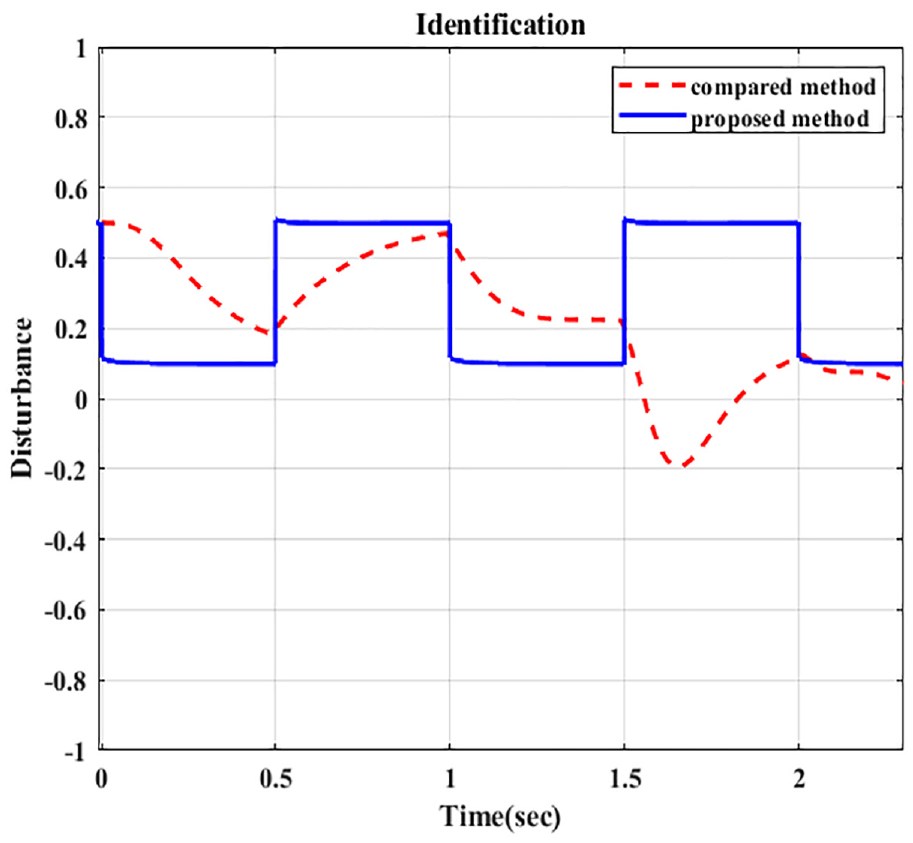
Identification of unknown disturbance equation (32) with two methods.
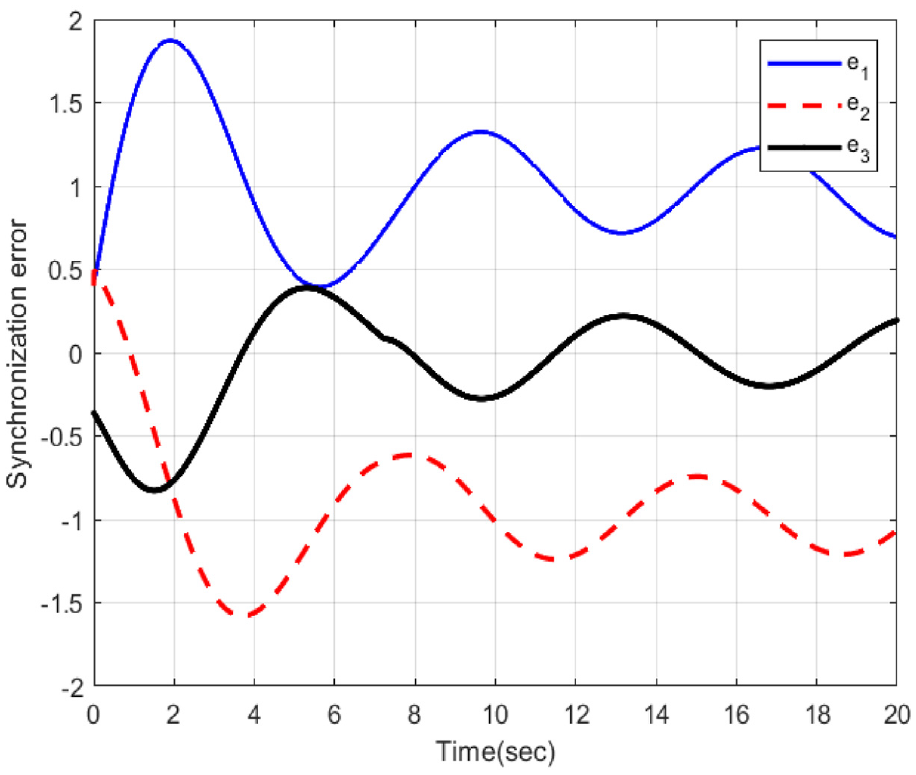
Synchronization errors with identification method of Behinfaraz et al. (2016).
Comparison of mean synchronization errors.
To show the advantages of the proposed method in this paper, we add one more comparison. We select a proposed method in Martínez-Fuentes et al. (2022). We use this method for the synchronization of two fractional-order systems with variable order and parameter as follows


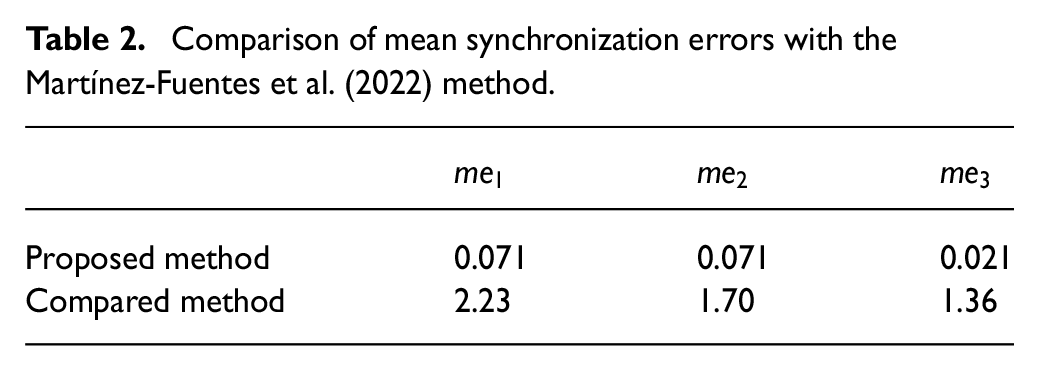
Results of this comparison are shown in Figure 14. As seen in this figure, the proposed method has an acceptable performance in the presence of time variations on the order and parameter, but the compared method does not have a good performance. Also, we calculate the equation (33) for this case and write it in Table 2. As seen in this table, the proposed method in this paper has a less mean synchronization error compared to the Martínez-Fuentes et al. (2022) method.
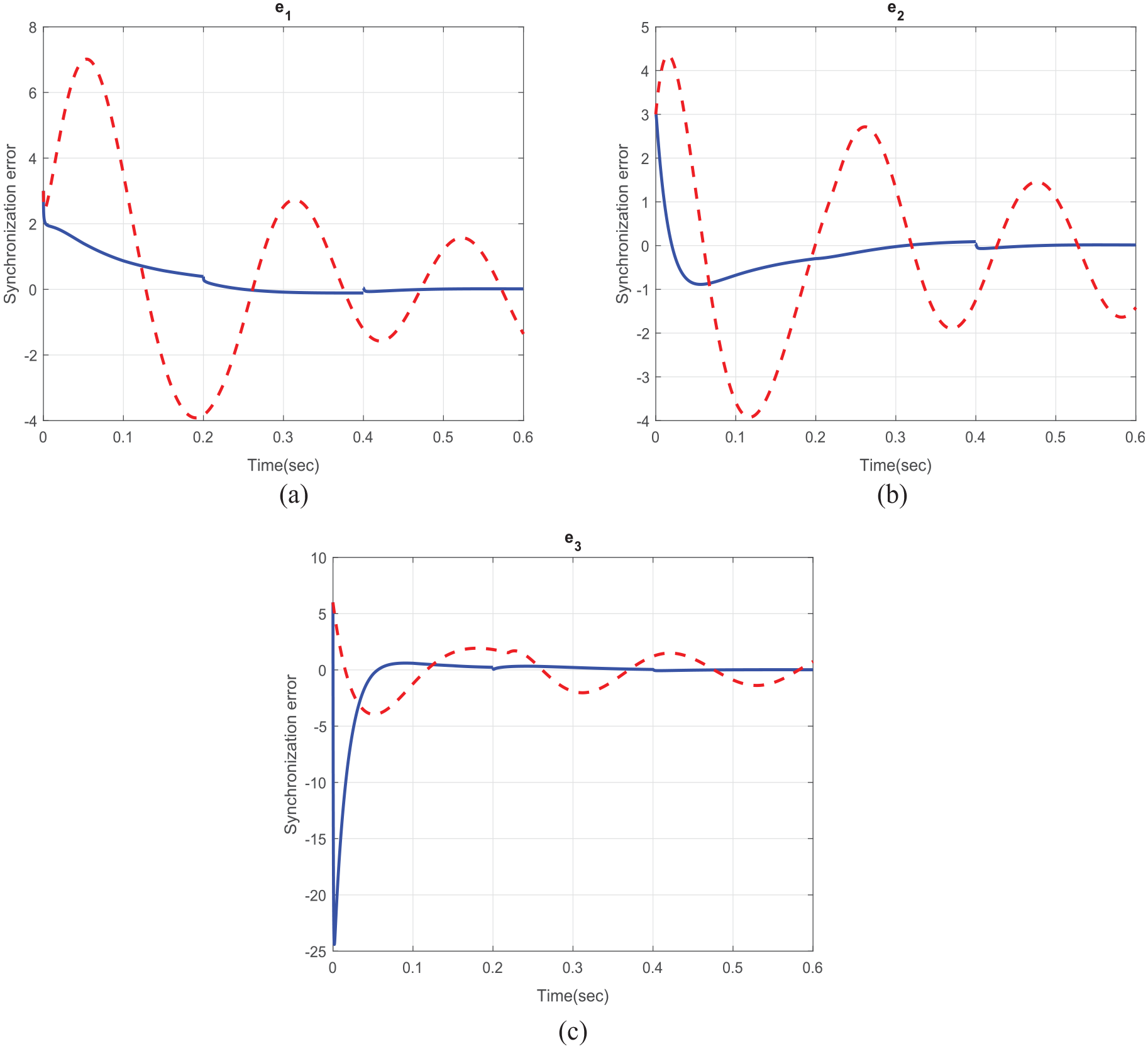
Comparison of synchronization results (proposed method (blue line), compared method (red line)): (a):
Comparison of mean synchronization errors with the Martínez-Fuentes et al. (2022) method.
Conclusion
In this paper, the synchronization of FOC systems with time-varying parameters, orders, and disturbance using nonlinear feedback control and Lyapunov theory was investigated. The unknown disturbance is first estimated using algebraic identification. The most important advantage of the proposed method is that the estimation is fast and accurate. In addition, this method is stable against noise, unlike many methods used so far to estimate the unknown disturbance. However, identification in cases where system changes are fast can be more challenging, which can be mentioned as a limitation of the proposed method. In the next step, synchronization of the fractional-order FOC systems in the presence of external disturbances was carried out using the proposed technique. Finally, the circuit of the proposed methodology is designed to set the practical implementation. The simulation and experimental results validated that the proposed approach offers accurate and fast transient responses. Further study of the algebraic method identification is an interesting topic in the future. We can consider this method for identifying the unknown parameters and uncertainties in many systems.
Footnotes
Appendix A
The practical implementation of the proposed approach is set up as shown in Figure 15. The master system is realized through the MATLAB IDE, while the slave system and disturbance identifier are implemented by the electrical elements according to the designed circuits. The operational amplifiers and the multiplier blocks are implemented using the LM741 and AD633 ICs, respectively. A data acquisition card with a sampling time of 1 ms is utilized to implement a fractional derivative circuit. So, due to the use of software as a fractional-order derivative in practical implementation, the existing noise does not have a significant impact on the system.
Using the data acquisition card does not have the limitations of other methods, such as frequency limitations and low estimation accuracy. A numerical method for the variable order fractional systems has been proposed in different studies before, and we used these researches in our simulations (Behinfaraz and Badamchizadeh, 2015; Tavares et al., 2016).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
All data analyzed during this study are included in this article.