
Abstract
This paper researches into a fixed-time consensus tracking problem for a class of second-order multi-agent systems (MASs) subject to external disturbances based on a fixed-time observer. First, we adopt a state observer to change the states of each agent from unknown to known. The observer is designed so that observed states and the leader’s state reach consensus. Second, according to the designed controller, states of each agent and observed states achieve consensus, namely leader-following consensus is realized and the setting time of which is obtained without depending on initial states. By employing Lyapunov stability theory, some sufficient criteria are obtained to achieve fixed-time consensus tracking for second-order MASs with disturbances. Finally, the validity of the design is verified by numerical arithmetic examples.
Introduction
Enlightened by biological behavior, the topic of cooperative control of multi-agent systems (MASs) has drown lots of interest, which has higher reliability, greater maneuverability, and efficiency than individual agent. As these problems are applied in various domains such as mobile robot (Ren et al., 2022; Sharifi, 2022), consensus (Han and Zheng, 2021; Zhao et al., 2020), and formation (Liu et al., 2019, 2020), it has drawn a tremendous amount of attention. Consensus problems play a critical role in collaborative control. The basic challenge in considering consensus is to conceive suitable protocols that make agents realize common states through local information interactions between neighboring agents. Some productive and significant results have been accomplished through researches in this direction (Ni and Cheng, 2010; Qin et al., 2017).
According to the presence or absence of a leader in the considered MASs, consensus protocols can be divided into two kinds. One is leader-following consensus protocol and the other is leaderless consensus protocol. Leader-following consensus can as well be referred to as consensus tracking. So far, there are plenty of fruitful results in this area. In the work by Zhao et al. (2018), an event-triggered protocol without the need for constant communication among followers was conceived to tackle consensus tracking problems for second-order nonlinear MASs. Based on the observer, problems of consensus tracking for nonlinear MASs were looked into in the work by Zhang et al. (2018), where MASs have state constraints and unknown disturbances. In the work by Gu et al. (2020), a sliding mode controller was constructed by introducing the statistical information of channel fading to reach consensus tracking for second-order MASs. In the work by Yoo (2018), recursive design approaches were proposed to devise local general adaptive controllers to tackle distributed consensus tracking problems for switched nonlinear MASs with directed graph.
Convergence rate is the key to determine whether consensus protocols are good or not. Asymptotic consensus with infinite convergence time was first introduced, and then finite-time consensus was raised. In contrast to asymptotic consensus, it is not difficult to derive that finite-time consensus can deliver better anti-interference performances as well as faster convergence rates. In the work by Li et al. (2011), the finite-time consensus problem in the absence of a leader and the finite-time observer-based consensus problem with external disturbances were examined for second-order MASs, respectively. The robust nonlinear finite-time consensus problem under undirected topology was addressed for MASs with external disturbances in the work by Zuo and Tie (2016). Using backstepping design method to come up with the event-based finite-time controller to achieve consensus for second-order MASs with input delay was addressed in the work by Ran et al. (2020). In the work by Tian et al. (2018), for second-order MASs that possess unknown velocities and external disturbances, robust finite-time consensus tracking problems were tackled using a high-gain observer.
In recent years, the terminal sliding mode control method has been widely used to study the fixed-time consensus tracking problems of MASs (Gao et al., 2020; Wang et al., 2019; Zhao et al., 2017). What is particularly noteworthy is that despite favorable performances of finite-time consensus, convergence times hinge heavily on initial states of the agents. The inability to acquire information about initial conditions of agents in advance leads to limit practical applications, which is considered to be the biggest drawback. Therefore, the notion of fixed-time consensus was born and was first cited in the work by Polyakov (2011) to be used for the purpose of surmounting the above drawbacks. In the work by Zou et al. (2019), fixed-time consensus problems for heterogeneous nonlinear MASs in the presence and absence of a leader was considered, respectively. Problems of fixed-time consensus for MASs under directed graphs with linear and nonlinear state measurements were addressed in the work by Zhang and Jia (2015). In the work by Ning et al. (2017), fixed-time consensus problems for first-order MASs with discontinuous nonlinear intrinsic dynamics were treated. In the work by Han et al. (2021b), two distributed bipartite average tracking protocols were constructed to resolve problems of finite-time and fixed-time consensus with bounded disturbance. The problem of fixed-time consensus tracking for second-order MASs based on terminal sliding mode control was first addressed in the work by Zuo (2015). The sliding mode surface is designed as a terminal sliding mode form, which can ensure that the state converges in finite time after reaching the sliding mode surface.
Under the influence of above discussions, based on a fixed-time observer, this paper inquires into the fixed-time consensus tracking problem for second-order MASs subject to external disturbances using the terminal sliding mode control and fixed-time stability theory. The contributions of this paper are threefold. First, unlike the works by Ran et al. (2020), Zou et al. (2019), Zhang and Jia (2015), Ning et al. (2017), this paper takes into account inevitable external disturbances. In real life and applications, external disturbances exist everywhere, which makes it indispensable to consider fixed-time consensus tracking problems under the influence of disturbances. Second, although there are many results on the finite-time consensus and fixed-time consensus, as far as we know, there is few result on the fixed-time consensus of MASs based on the distributed observer. Compared with the works by Zuo and Tie (2016), Zou et al. (2019), Zhang and Jia (2015), Ning et al. (2017), this paper designs distributed fixed-time observers to change the states of each agent from unknown to known. It can observe states of leader to ensure that MASs can reach fixed-time consensus. And it only relies on information between neighboring agents. Even if the agent doesn’t link to the leader directly, the state information of the agent can be observed.
The remainder of this paper is organized by five parts. Section “Preliminaries” proposes preliminaries and system description. Section “Main results” discusses the problem of fixed-time consensus tracking problem for second-order MASs. Simulations are performed in section “Simulations” and it summarizes in section “Conclusion.”
Preliminaries
Graph theory
A directed network can be expressed as
System description
Let a set of

where

where

Lemmas

where



Main results
A distributed fixed-time observer
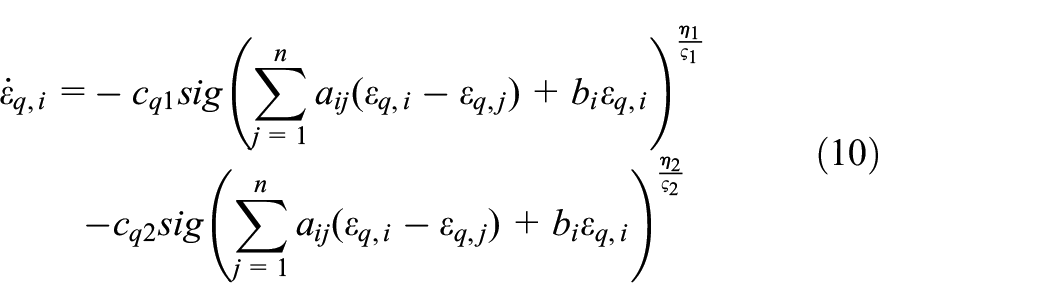
Due to the fact that not all agents have a direct link to the leader, states of the leader is required to be estimated, so the fixed-time observer is designed as follows
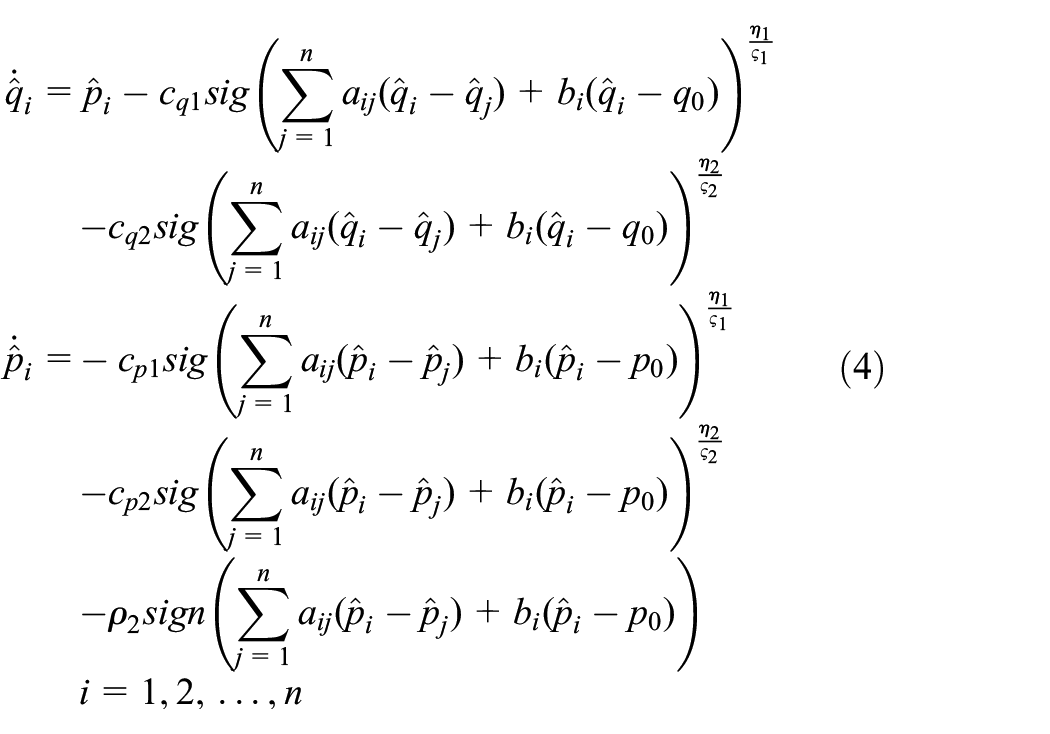
where

Then, the derivative of equation (5) can be written as follows
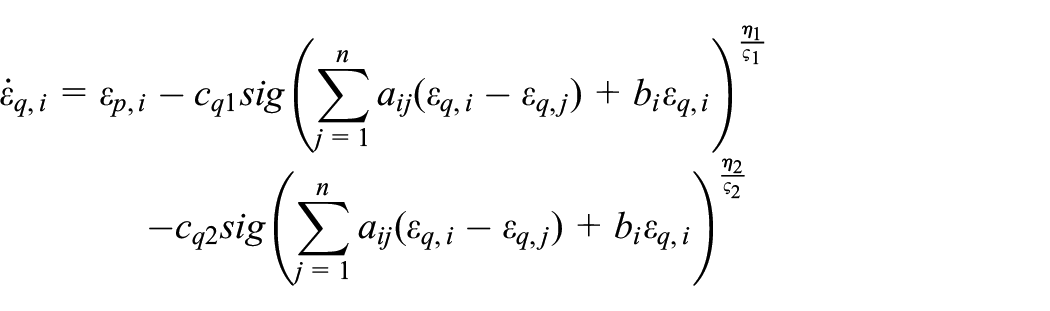
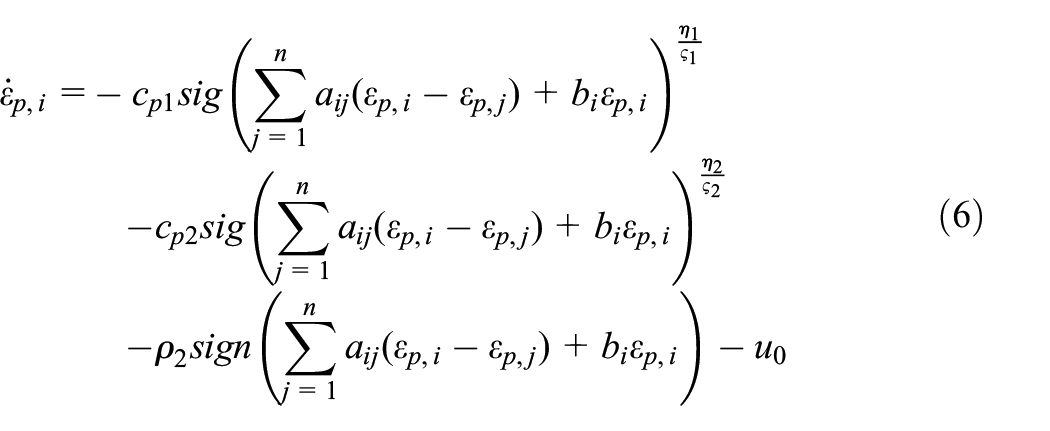
Let
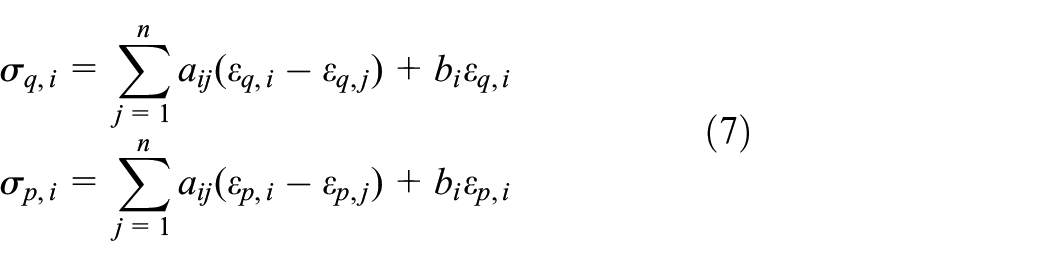
Define

where
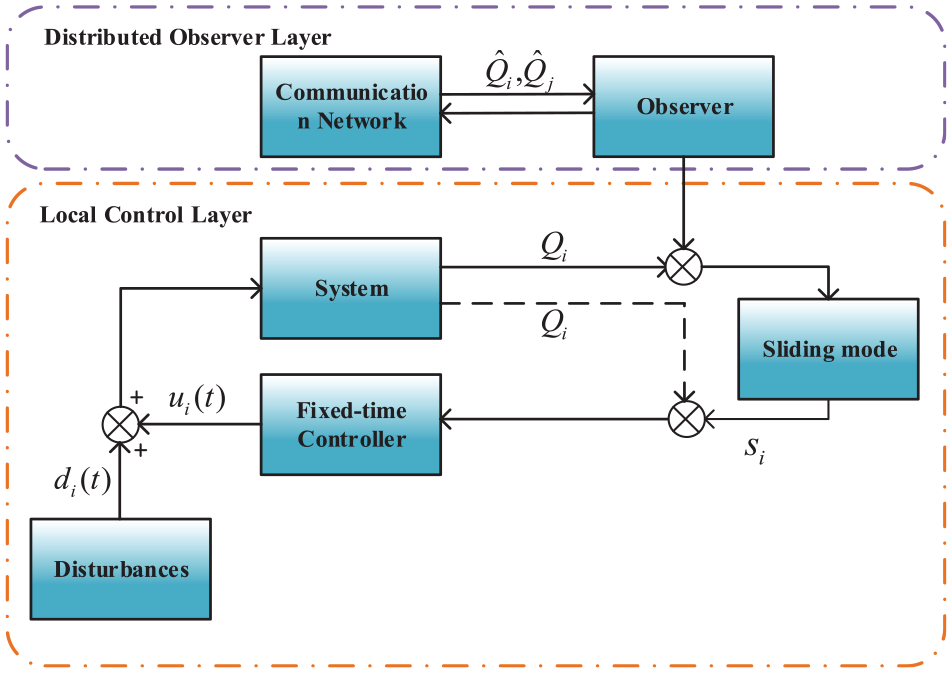
Control framework of the proposed fixed-time algorithm.

Taking the derivative of
By Lemma 2, Lemma 3 and Assumption 2, we can further get
Since

In the issue, by Lemma 1, we can obtain
Similar to the above steps, we construct Lyapunov function as

one has

Hence, by Lemma 1, we can easily obtain
A fixed-time tracking controller
On the basis of the above fixed-time observer, follwers can make an accurate estimate of leader states. Define

as the tracking error. After

The fixed-time sliding mode surface is constructed as follows

and the controller is chosen as follows
where

Construct the Lyapunov function as follows

If

Due to Assumption 1, we can further obtain

Hence,

Consider a Lyapunov candidate

Its derivative is

Based on Lemma 1,
Simulations
In this section, the validity of theorems is verified by numerical arithmetic examples. Consider a system of

and

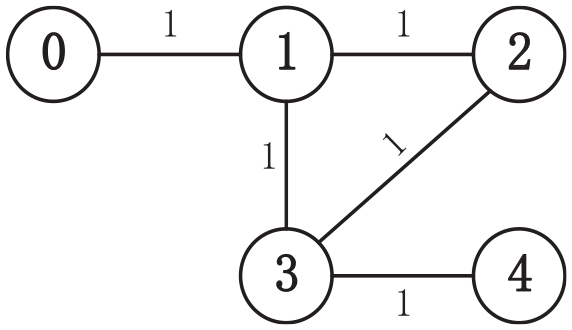
Interaction topology
The dynamics of agents is given by equation (1) with disturbance term

and

Parameters of the observer are set as
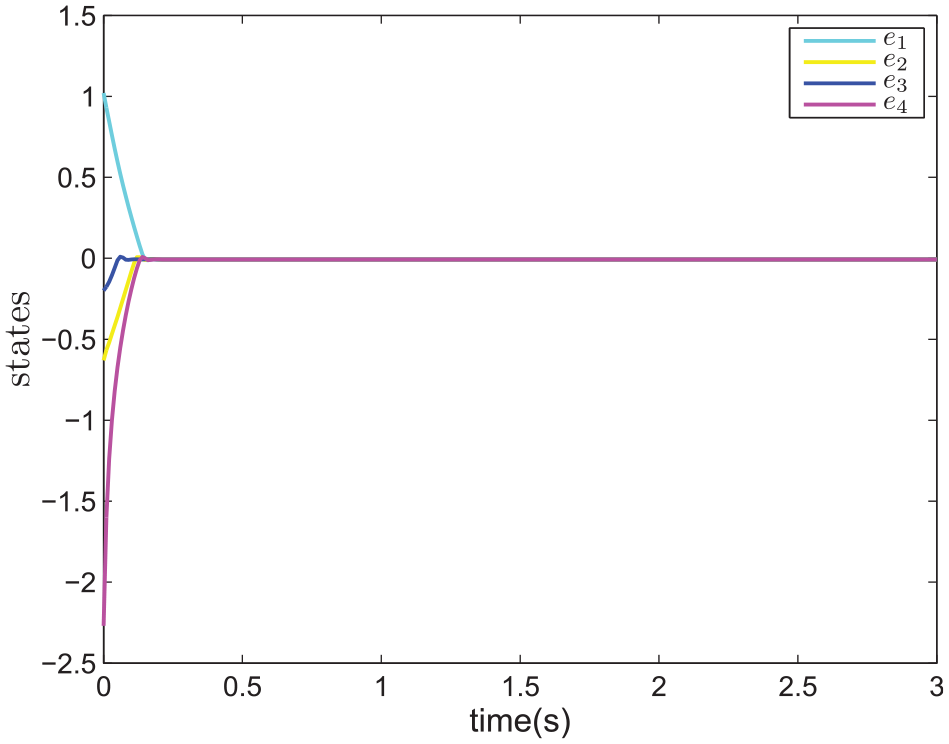
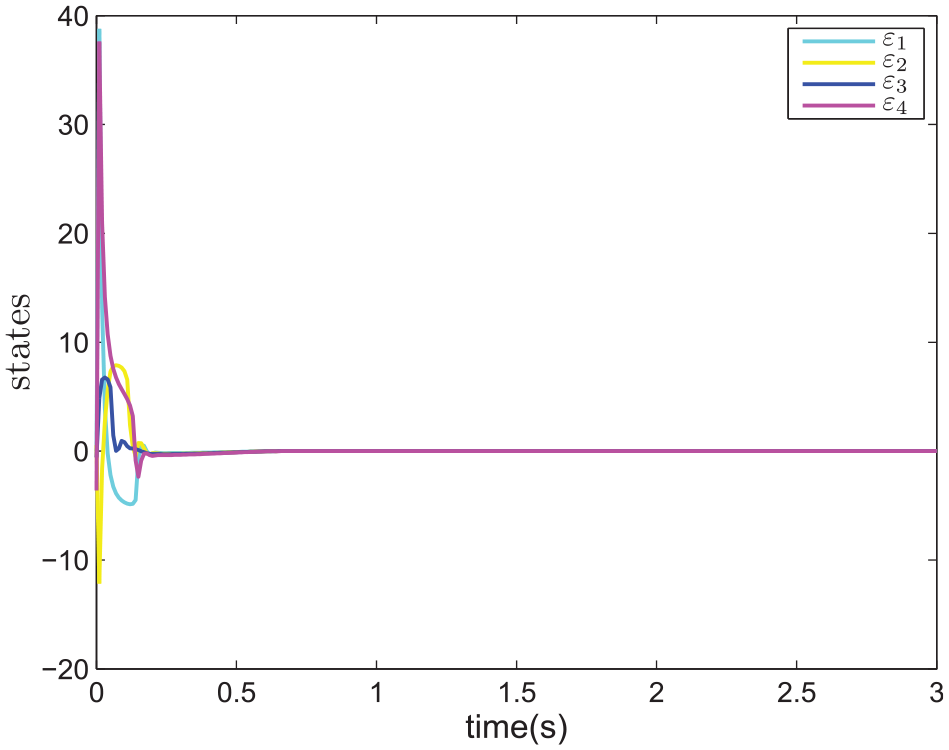
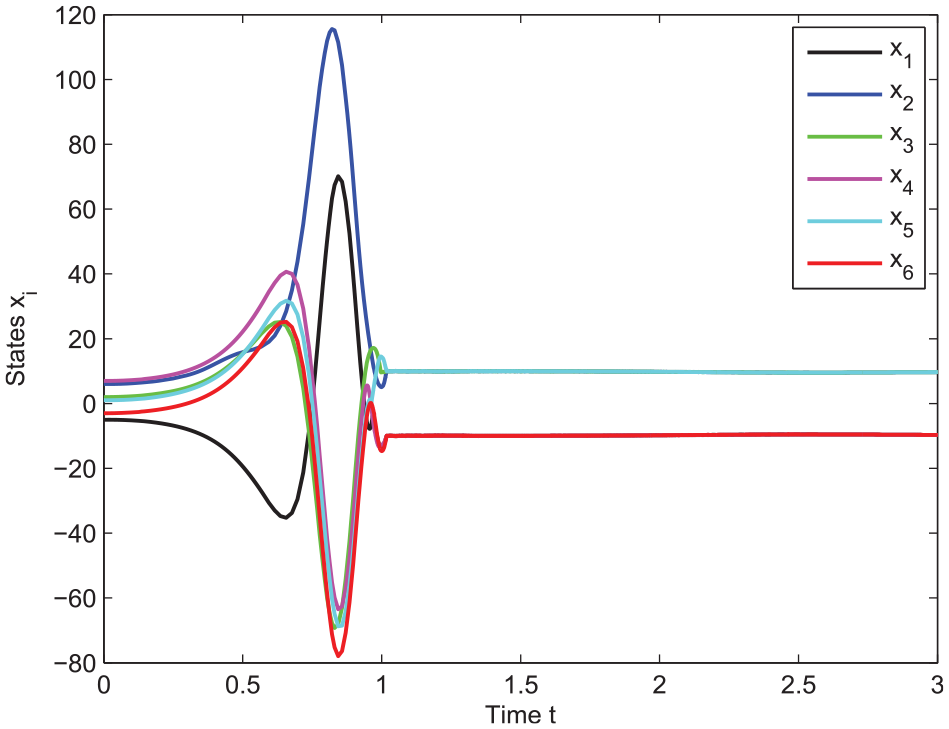
From the above parameters, we can obtain the following simulation results (see Figures 3–8). Figures 3 and 4 show trajectories of
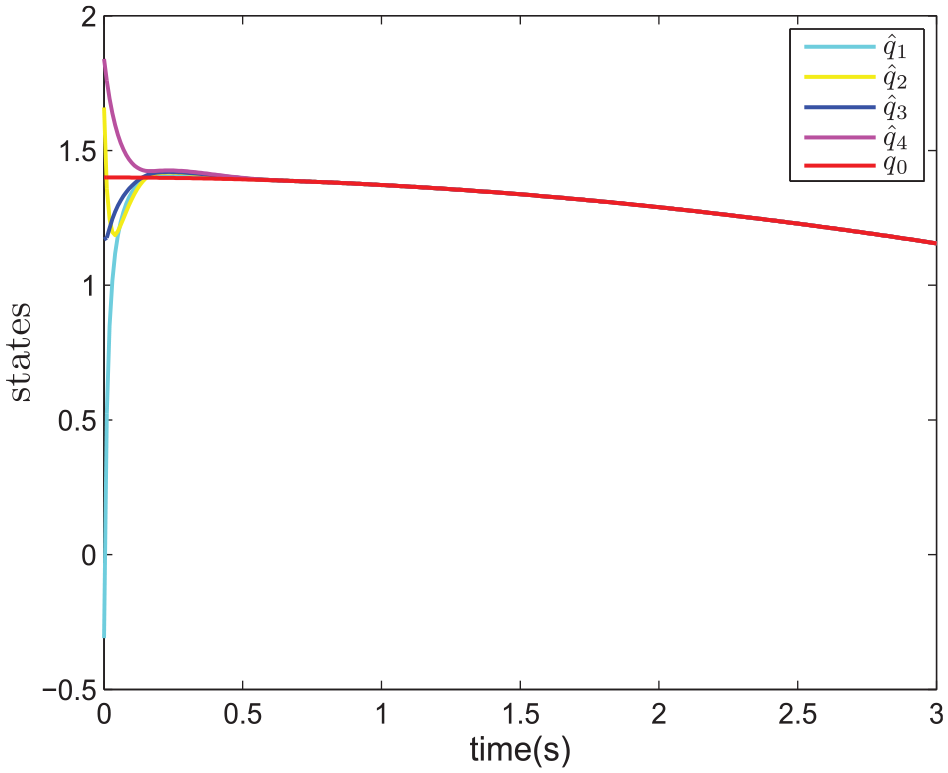
Trajectories of
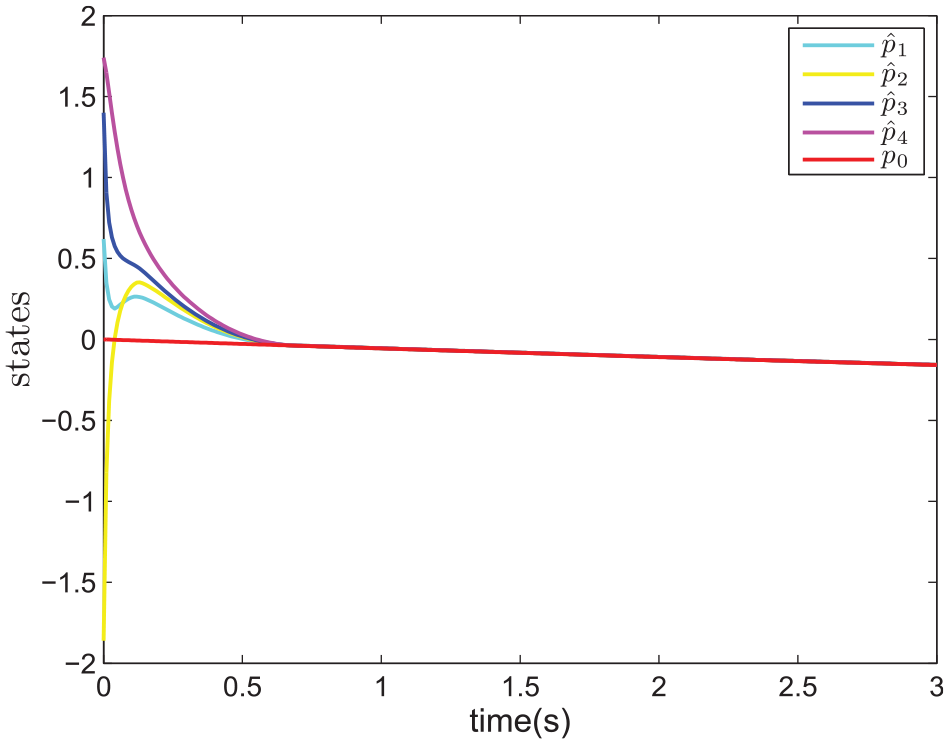
Trajectories of
Evolutions of
Evolutions of
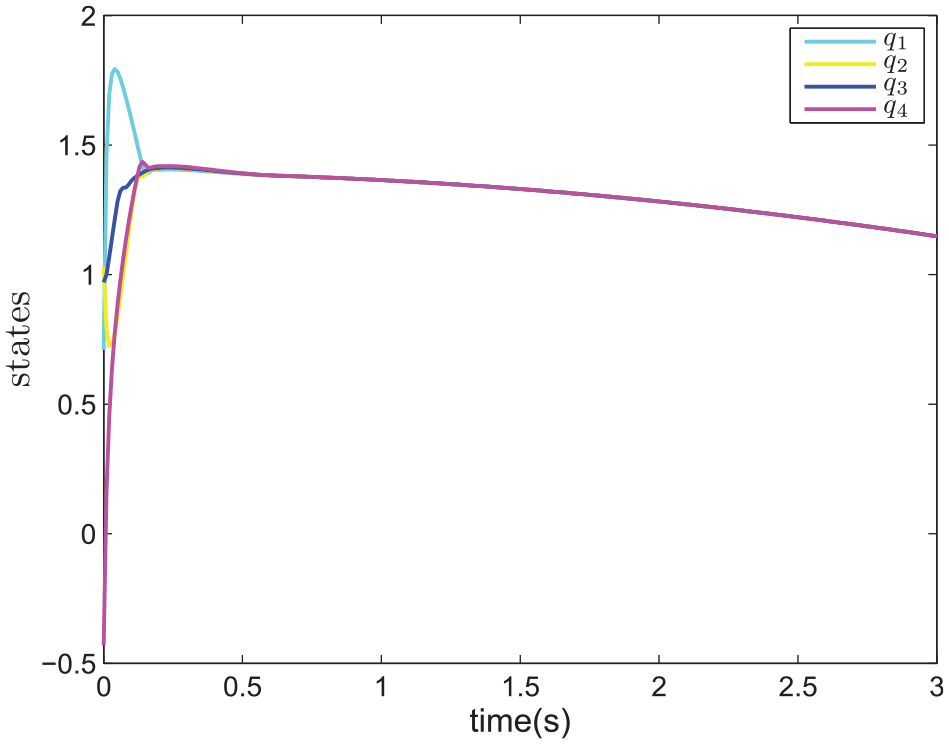
Position state trajectories of each agent.
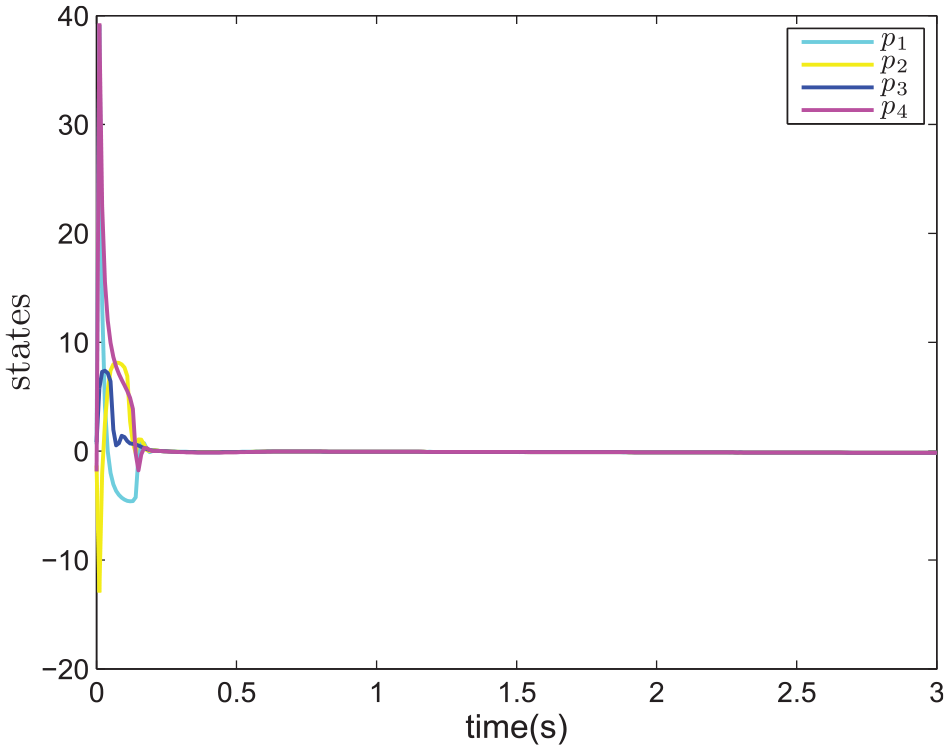
Velocity state trajectories of each agent.
Fixed-time bipartite consensus of Theorem 1 in the work by Li et al. (2022).
Conclusion
This paper centers around the problem of fixed-time consensus tracking for second-order MASs with external disturbances under undirected graphs. To implement the fixed-time tracking task, the design thinking is divided into two steps. First, a distributed fixed-time observer is engineered to make each agent estimate leader’s states at a fixed time. Second, based on the estimation of the leader state, each follower tracks the leader at a fixed time using a fixed-time sliding surface. Simulation results showed that the proposed control laws could guarantee the closed-loop system had fixed-time convergence rate and desired tracking performance. Future research can be extended toward the study of the directed graph and predefined time.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grants 62071173, 62072164, and 61971181; the Natural Science Foundation of Hubei Province under grant 2022CFB479; and the Outstanding Youth Science and Technology Innovation Team in Hubei Province under grant T2022027.