
Abstract
In this paper, a consensus-based distributed formation control method is proposed for improving the coordinated battle efficiency of coordinated battle system for manned/unmanned aerial vehicles (MAV/UAVs). The method proposed is designed based on consensus protocol, which contains three parts. First, the distributed structure with limited centralized strategy for MAV/UAVs cooperative system is designed. Second, a second-order dynamic model is built up to describe the distributed formation system, which is further simplified using feedback linearization method. Third, the information exchange topology of MAV/UAV-coordinated battle system is established on the basis of graph theory and leader–follower mechanism. Finally, the effectiveness of the proposed formation strategy for MAV/UAVs cooperative system is proved asymptotic convergence by constructing a reasonable Lyapunov function which guarantees the accurate formation maintenance. Simulation results are presented to demonstrate the effectiveness of the proposed method. And comparative simulation results reveal that the method proposed in this paper is superior to traditional algorithms in the aspects of accuracy and stability.
Keywords
Introduction
Collaboration is becoming one of the most effective means to improve the survivability and operational efficiency of modern battle systems. The collaboration of manned/unmanned aerial vehicles (MAV/UAV) refers to group behavior that not only performs independent calculation, storage, and processing but also achieves a common goal through spontaneous and equal interaction between manned and unmanned systems in terms of organization, decision-making, planning, control, and perception. Compared with unmanned systems, the collaboration of MAV/UAV can perform better in complex tasks due to parallel interaction and integration of human intelligence and machine intelligence. The difference between MAV and UAV in intelligence level and functional performance is an important foundation for the complementation of coordinated battle system. However, efficiency, timeliness and complexity of information exchange cannot be ignored when MAV/UAV perform combat missions. Considering the operational capability and formation security of the coordinated battle system, it is necessary to solve the problems of rapid assembly, formation reconfiguration and formation maintenance. The main advantages of MAV/UAV collaboration can be concluded as follows:
The collaborative system can achieve a better performance when executing difficult tasks. Under the limited control of MAV, UAVs replace MAV to perform dangerous missions, which can greatly reduce unnecessary risks and casualties. In this way, UAVs can adapt to a highly confrontational and highly uncertain environment, and the survivability of the collaborative system is higher.
The collaborative system has stronger robustness. Under the command and control of MAV and self-adjustment of UAVs, the entire system can quickly respond to unexpected accidents, which ensures the missions to be completed safely and efficiently. And the combat capability of the formation is significantly higher.
The collaborative system has higher information exchange efficiency. In the process of coordinated battle, MAV and UAVs transmit information through a short-range data protocols, with fast transmission speeds and high efficiency. Meanwhile, because of the reduction of transmission range, the transmission of information is less interfered by terrain and radar, which effectively prevents the information loss.
In the conceptual design of the MAV/UAV-coordinated battle system, the researchers studied how UAV and MAV can coexist effectively in the same airspace, and give full play to their respective advantages. The concept of manned/unmanned common architecture (MCA) is proposed in (Wilkins, 2003), which focused on the integration capability of manned/unmanned system. The concept of fighter engagement manager (FEM) proposed in Lummus (2003) focuses on developing a solution of lower risk, lower cost, and higher performance to the suppression of enemy air defense (SEAD) missions. The FEM concept utilizes MAV, such as F/A-22, with versatile UAVs to perform the challenging and dangerous Reactive Lethal SEAD (RLS) mission. This study provides improvements in enabling more effective multi-aircrafts and shortening the timelines, collaborative tactics to neutralize and kill Integrated Air Defense System (IADS) threats. Because of the complicatedness of SEAD missions, several issues may arise during the planning process, including reduced situation and plan awareness. In order to assist the MAV, an operator model (Schwerd and Schulte, 2021) that understands the human planning process is developed to support the MAV more explicitly by reducing disruptive interactions. And the plan quality is increased through this mixed-initiative interaction approach. The concept of manned–unmanned teaming (MUM-T) proposed in Schmitt and Schulte (2013) aims at improving the situational awareness of MAV, shortening mission completion time, and reducing the risk of MAV with UAVs integrated. However, these studies also show that the currently used interventions failed to reduce the workload of MAV. The collaboration of MAV/UAV on the battlefield exposed some serious problems, such as disorganization, weak control, and blind action. The fundamental reason lies in the lack of an effective control and optimization mechanism for autonomous coordination of MAV/UAVs collaborative system.
In order to achieve excellent performance, the MAV/UAV-coordinated battle system involves cooperation in all aspects, including observation and monitoring, decision-making and assignment, path planning and collision avoidance, formation control and information exchange, and effective evaluation of coordinated attack, as presented in Figure 1. The function for each component can be expressed as follows:
The function of observation and monitoring module is the collaborative perception, information sharing, and situation understanding of humans and machines.
The function of decision-making and assignment module is to analyze the characteristics of weapons, attack positions and target targets and achieve the distribution of tactical objectives.
The function of path planning and collision avoidance is to plan the route to reach the predetermined location in an environment with known obstacles and threats and avoid collisions in real-time during high-speed maneuvers.
The function of formation control and information exchange module is to design optimized formation and realize the MAV/UAV formation synchronized flight under the constraints of nonlinear dynamics.
The function of effectiveness evaluation of coordinated battle is to evaluate the collaborative ability under confrontation conditions, verify the availability and effectiveness of the collaborative architecture, and establish a supervision mechanism of collaborative system.

The components of MAV/UAV-coordinated battle system.
Apparently, the formation control and information exchange module is the module that connects MAV and UAV, which is the key point to achieve collaboration. The formulated coordinated battle system can be used for subsequent situation inference or coordinated strikes. Therefore, among the above mentioned five functional modules, to solve the problems of formation control is the most challenging part to realize collaboration with considerations of the above mentioned limitations.
Formation control of collaborative systems has been researched extensively in the literature. Typical approaches for formation control can be categorized as behavioral (Alfeo et al., 2019), leader–follower (Gong et al., 2022; Liu et al., 2022; Rosa, 2020), virtual structure (Zhou et al., 2018), and graph theory (Yan et al., 2022; Yuhang et al., 2022) based approaches. Behavioral approach requires that every action of UAV should correspond to every expected behavior of UAV, and it is defined by the weighted average of behaviors. However, accurate modeling of different behavior modes of UAV is the biggest problem in the engineering implementation of this method. Leader–follower-based approach has low computational efficiency owing to the need to communicate with all the followers and to issue control instructions. The computational burden of the leader is excessive. In the virtual structure method, a powerful ground station is usually designated as the virtual leaders, which requires not only high computing performance but also powerful communication functions. Since the ground station needs to calculate the flight state of all UAVs and communicate with them, it is difficult to apply this method to engineering implementation.
It is assumed that information can be received continuously in the above traditional methods, which requires sufficient computing resources and an ideal communication environment. In actual combat, however, there will be problems such as limited transmission speed and delay in obtaining information by sensors (Tang et al., 2022). In the method based on graph theory, the topological constraints of agents and the related communication interaction are two key factors affecting the stability of the coordination systems (Jiang et al., 2020). In some studies, considering linear consistency such as time constraints can solve the problem of formation control in the presence of parameter uncertainties and disturbances (Cheng et al., 2021; Zhang et al., 2021). A method of switching time-invariant formation control for heterogeneous multi-agents formation system is proposed in Tran et al. (2020). In this study, a negative imaginary consensus control protocol is adopted to switch the formation shape of the agents, and only the relative distances between agents and the distance between agents and obstacles are used. Convergence is an important performance metric for formation control of MAV/UAV-coordinated system. However, most existing graph theory–based studies only consider asymptotic stability, that is, when the time tends to infinity, it reaches convergence, without paying attention to the response speed and state of the system.
Considering the information exchange and negotiation between multiple aircrafts, the combination of consensus protocol and distributed (or decentralized) structure is widely used to solve the cooperative control problem (Chen et al., 2022). The typical distributed structure means that each UAV should only communicate with its neighbors to obtain data and adjust its relative position. A decentralized cooperative control method is proposed in Muslimov and Munasypov (2021), which is used to control the fixed-wing UAV swarms to start and keep flying in a parallel formation with specific geometry. Different from the traditional linear consensus protocol, the formation controllers take into account not only the nonholonomic dynamics of fixed-wing UAVs but also the input constraints for the autonomous driving UAV system, so that the aircraft can occupy any initial position before the algorithm starts to run. A fully distributed adaptive formation control protocol for networked four-rotor in switched communication topology is studied in Liu et al. (2021), in which the dynamics of each UAV contains serious nonlinearity and uncertainty at the same time. For the case of switching communication topology, the adaptive formation control protocol is proposed to ensure that the translation and rotation tracking errors of the global closed-loop system eventually converge to the neighborhood of the prior set of the origin. In Sun et al. (2018), a distributed consensus tracking control method is proposed for linear multi-agent systems with deterministic disturbances. The adaptive consistency protocol with directional communication topology is designed under the fully distributed architecture, that is, the parameters in the protocol are independent of global information. This consensus protocol with adaptive state estimator separates the adaptive coupling gain from the controller to the observer, thus isolating the possible bursts of adaptive coupling gain from the control input. Most of the distributed structures in existing methods adopt peer-to-peer cooperation and interaction, and the efficiency and adaptability of information transmission are general. The introduction of hierarchical structure (Wang et al., 2022) in MAV/UAV collaborative system can improve the efficiency of comprehensive decision-making and information interaction. However, in the existing methods, this feature does not extend to the MAV/UAV cooperative control system.
Therefore, it is necessary to obtain a more accurate and efficient MAV/UAV cooperation system by formation control method. Considering the limitations of typical methods, this paper puts forward some novel methods to overcome the shortcomings of the existing methods. This paper focuses on three issues: (1) How to improve control level of MAV in coordinated system? (2) How to build a precise mathematical model for the coordinated formation system? (3) How to improve the robustness of the coordinated battle system? The motivation of this paper is to develop an efficient cooperative strategy for MAV/UAV-coordinated battle system by introducing consensus algorithm. The main contributions of this paper are described as follows:
Compared with the multi-UAVs formation, MAV/UAV formation is a collaboration between different intelligence levels. The differences in mutual understanding and decision-making between MAV and UAVs lead to difficulties in judgments. A distributed structure with limited centralized is proposed to improve the control level of MAV efficiency of information interaction between hierarchical levels in the coordinated system.
Most research works are only based on kinematics or the simplified mathematical model, which can not reflect the complex dynamic characteristics of the large-scale and high-speed physical battle system. A precise mathematical model for the coordinated formation system formation is built under dynamic consistency. Compared with other linearization methods, the proposed method can better accomplish this control task since the output feedback is introduced to make the system more robust to noise and the controllability and observability of the system can be kept unchanged. Based on this precise dynamic model, our research can achieve more complicated formation in three-dimensional space.
In order to improve the fault tolerance and robustness of the coordinated system and ensure the stable convergence of the closed-loop system simultaneously, a consensus-based method is proposed for the MAV/UAV-coordinated formation control. In specific, the information exchange topology is integrated into the controller constraints of the second-order dynamic by extending the consensus problem to a problem of formation control strategy through choosing appropriate state information on which consensus is reached. Besides, we also show that the existing formation control approach and nonlinear dynamic model can be unified in the consensus architecture.
In the above part, the research background and present situation of MAV/UAV-coordinated battle system are analyzed in detail. By pointing out the unsolved problems at present, the research purpose and contribution of this paper are expounded. The rest part of this paper is organized as follows. In section “Methodology,” the distributed structure with limited centralized strategy for MAV/UAV-coordinated system is designed, and the mathematical model formation control for MAV/UAV-coordinated battle system is established. Then, the information exchange topology of MAV/UAV formation is established based on graph theory and leader–follower mechanism. At the same time, the MAV/UAV-distributed formation system is solved by combining consistency with dynamic protocol, which is proved asymptotic convergence. In section “Simulation experiments of formation control,” the simulation results are presented. Finally, conclusions are drawn in section “Conclusion.”
Methodology
Distributed structure with limited centralized strategy
A suitable cooperative control structure can ensure the effective information interaction between MAV and UAVs. The distributed structure with limited centralized is a distributed structure under limited central control which integrates the advantages of centralized and distributed structures and has a better scalability and robustness. System under this structure can fully exert the command and decision-making ability of MAV, and the swarm intelligence perception ability of UAVs; the communication load is better than complete centralized structure and does not require highly autonomous control ability as distributed structure.
The statement of the collaborative MAV/UAV formation problem can be described as follows. When one manned aircraft and several UAVs perform a specific task cooperatively, the MAV and UAVs share battlefield information and respond quickly, which means that the communication between MAV and UAV is considered ideal. In mission area, MAV is located in a safe area outside the enemy’s fire range, monitors the UAV’s mission, and sends instructions directly to the UAV when necessary. What is needed is an MAV/UAV formation control protocol which can express internal communication logic.
To meet the real mission requirements, it is necessary to embed the distributed structure into the framework of coordinated battle system for design to improve the reliability of the system. The introduction of limited centralized strategy into distributed structure is the key to being superior to traditional coordinated system. Therefore, this paper mainly focuses on design of distributed structure in the framework of coordinated battle system.
The distributed structure with limited centralized strategy includes control level, intelligent decision-making level and autonomy level, as presented in Figure 2. The control level and the autonomy level are responsible for the issuance and execution of missions, respectively, and the intelligent decision-making level is responsible for analyzing situation information of battlefield. In particular, the traditional human–machine interface (HMI) has been extended to the human, machine, and agent interface (HMAI). The function of HMAI is to realize the processing of intermediate information and achieve communication between the control level and the intelligent decision level and between the intelligent decision level and the autonomy level. HMAI realizes the transfer of control authority between the control level and the intelligent decision level and also brings advantages of performance of cooperative control system and reducing computation workload. The intelligent decision-making level sends control commands to the UAV through the flight control system (FCS) and the flight management system (FMS).
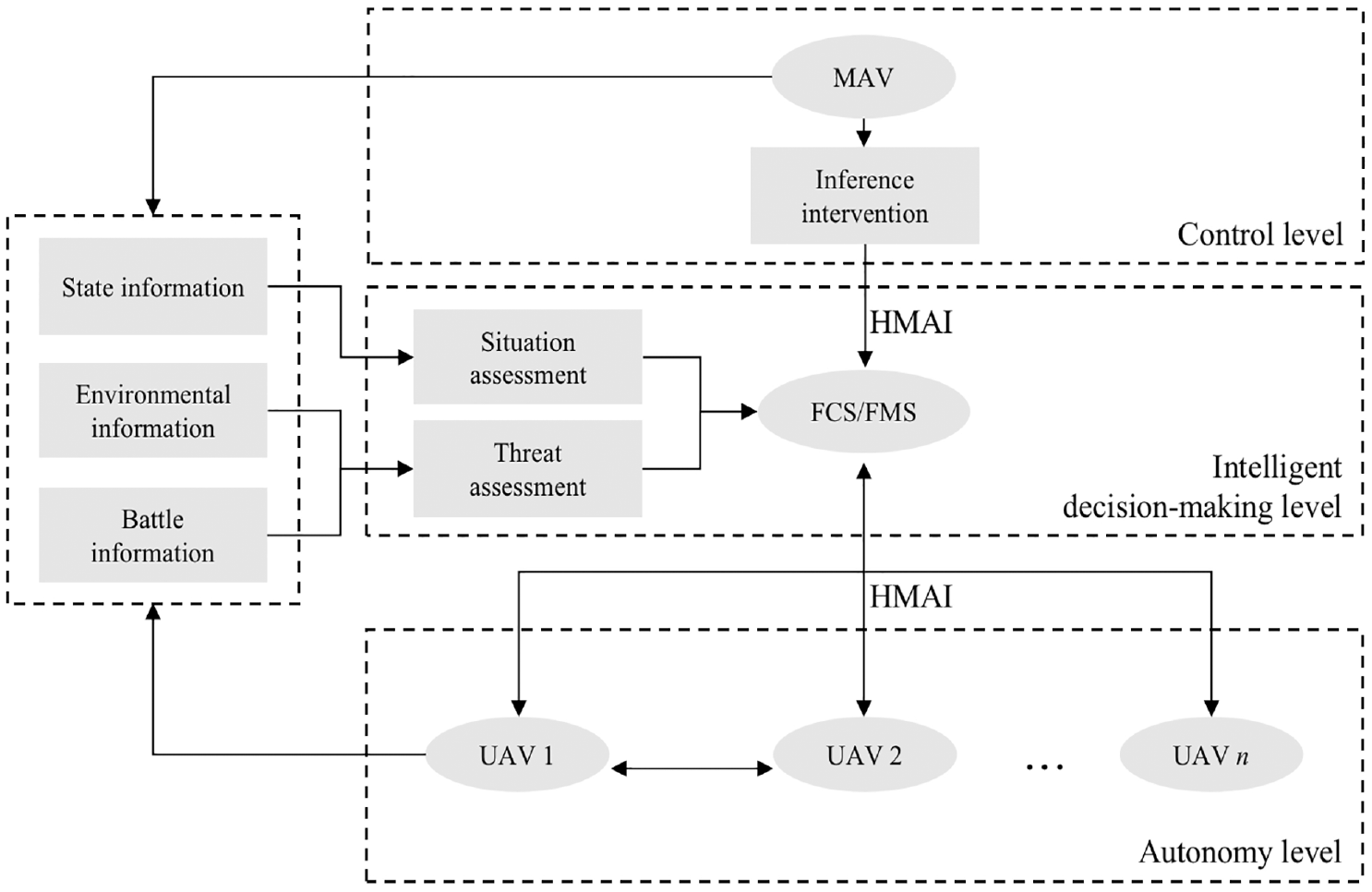
Diagram of distributed structure for MAV/UAV cooperative system.
In order to improve the authority interaction of manned/unmanned collaborative system command and decision-making and to solve the collaborative decision-making problem in a dynamic environment, it is necessary to introduce a limited centralized manned/unmanned coordination intervention mechanism to realize the switching between autonomy and artificial intervention from the decision-making level. As shown in Figure 3, by judging that if the situation assessment
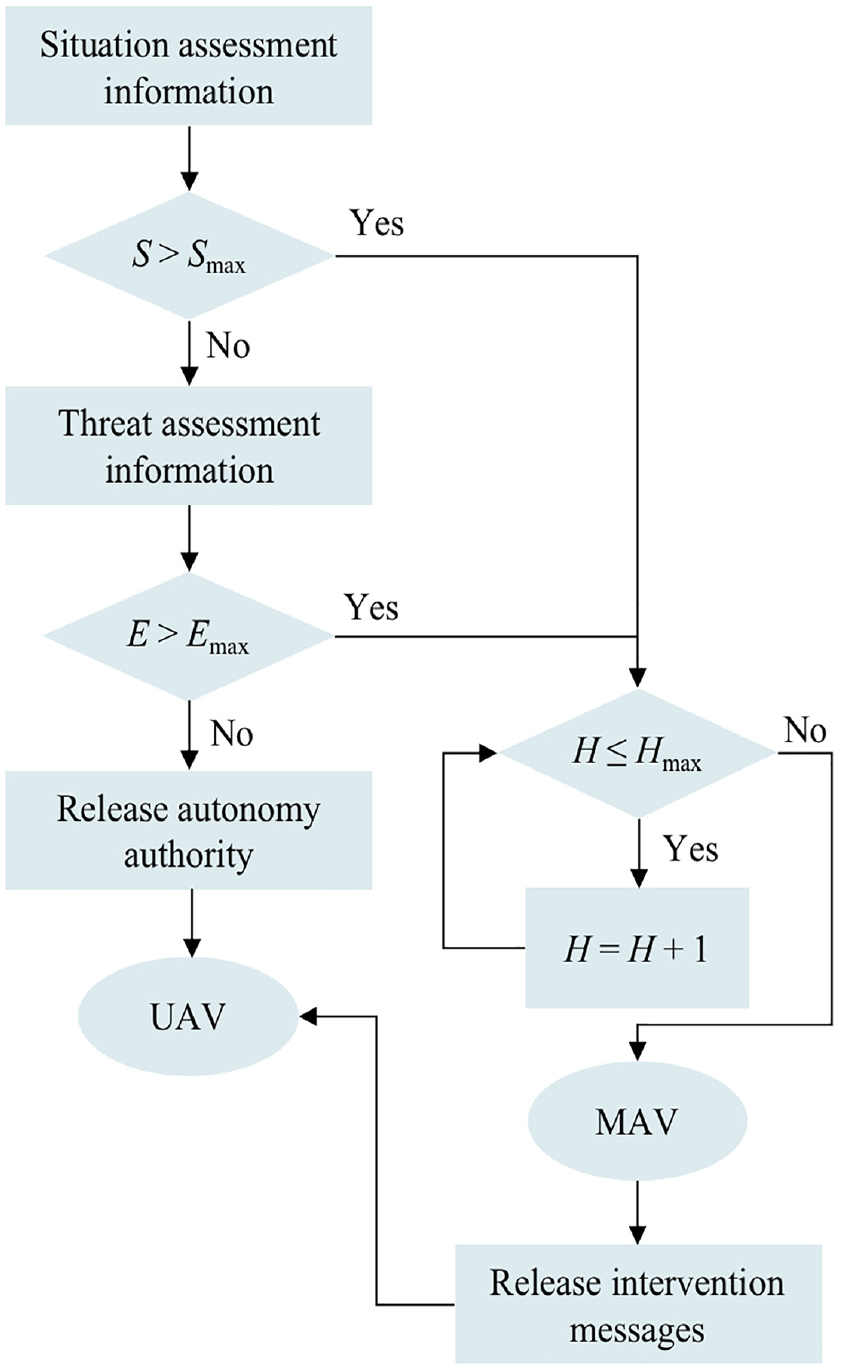
Diagram of intervention mechanism for MAV/UAVs cooperative system.
Consensus-based formation control for MAV/UAVs cooperative system
Mathematical model of MAV/UAV system
The cooperative combat capability of MAV/UAV collaborative system depends on the specifications and structural conditions of the system, and these parameters will be affected by the change of characteristic dynamics and external conditions in flight. Many existing research works do not think that the MAV/UAV cooperative system is a high-order nonlinear system, but assume that the kinematics model is accurate. However, the uncertainty of system parameters may cause the formation control of MAV/UAV model to be unstable. Therefore, the second-order dynamic model is established to describe the motion of the aircraft more accurately, and the feedback linearization method is adopted to facilitate subsequent algorithm design. The system is more robust to noise, and its controllability and observability remain unchanged.
The nonlinear dynamic model of MAV/UAV can be expressed as equation (1)

where
First derivative of

According to the force analysis in Figure 4, it can be obtained that second derivative is given by
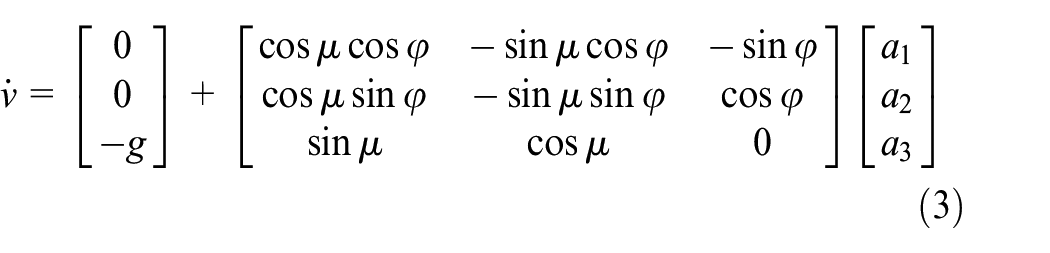
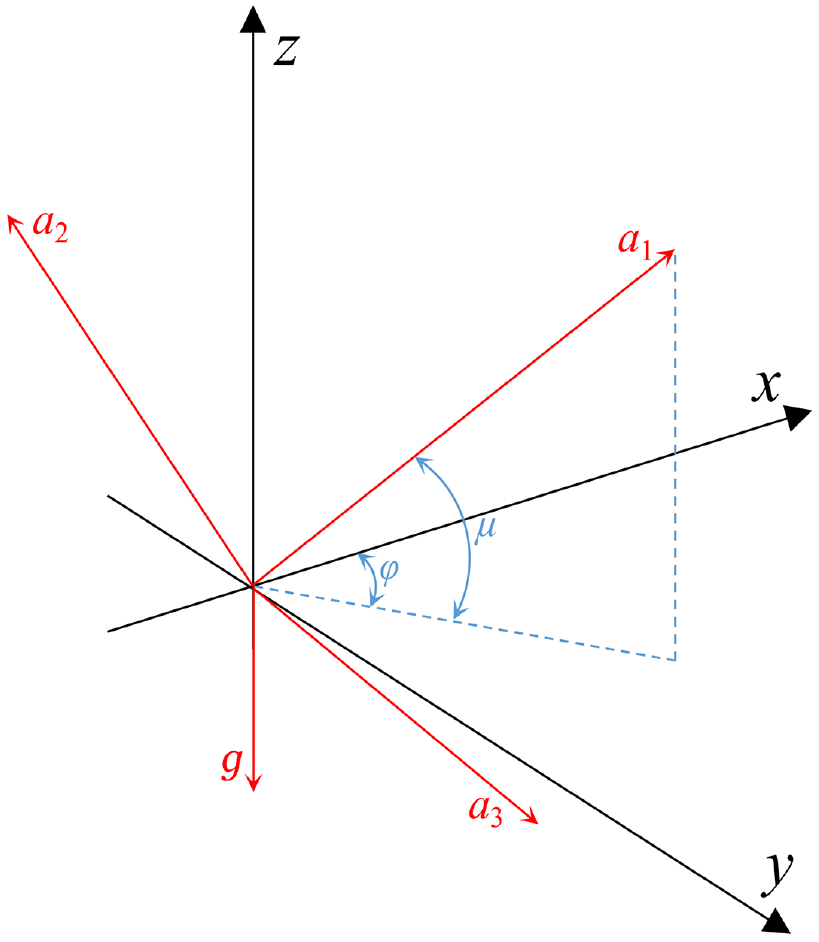
Schematic diagram of force analysis.
The system can be linearized by output feedback due to the relative degree of 2. Assume that

where
And the new input is given by
The state equation of system can be transformed into

Therefore, the second-order nonlinear dynamic model of MAV/UAV is simplified by feedback linearization.
Consensus-based formation control method
The basic idea of consensus theory is that each agent in the MAV/UAV coordinated formation can communicate with its neighbor agent, and a distributed algorithm is designed to make the state variables of agents consistent, so as to realize the cooperation between MAV/UAVs. The advantage of the consensus-based method is that the state information of neighboring agents are introduced as feedback, and the designated formation can be formed only by exchanging information between neighboring agents without complicated stability analysis, which can realize large-scale distributed formation control, and the robustness of the system will not be reduced because of the withdrawal or failure of formation members.
Graph
The inner connection of the information exchange topology network is expressed by the adjacency matrix


where
The in-degree matrix

Particularly, when graph is symmetric,
The position and speed of MAV are denoted by

The incidence matrix B is used to describe the communication enablement between UAVs and MAV, defined as follows

when
To ensure that the system of equation (6) tends to be consensus, the control law is designed as
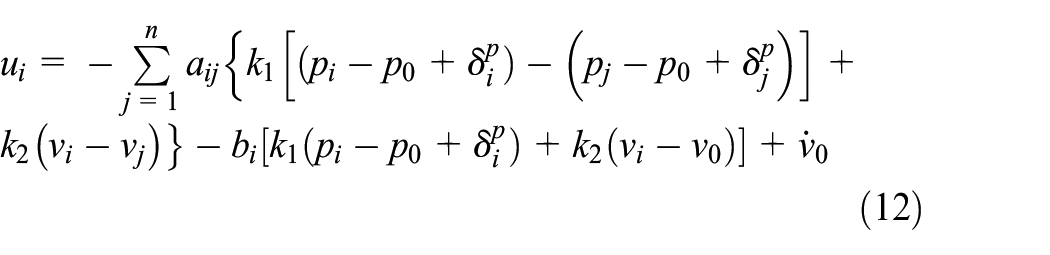
where

satisfies the Hurwitz condition.
In that way, if the vertex of MAV is not globally reachable in graph
Case i: if the vertex of MAV is globally reachable in graph

Zero is a simple eigenvalue of
Thus, the result comes to that zero is an eigenvalue of
Case ii: if the vertex of MAV is not globally reachable in graph
Assume that the vertex of MAV is not globally reachable in graph
Therefore, if node 0 is globally reachable in graph

Since matrix
Thus, it is proved that matrix

satisfies the Hurwitz condition.

With substitution of equation (15), equation (16) can be expressed in matrix form as follows

where
According to Theorem 1, since matrix

where
The Lyapunov equation was constructed as follows

Then

The system (6) is asymptotically stable, that is, the MAV/UAV can achieve formation maintenance under the control law (12), which also implies the stability of system represented by equation (1) due to the equivalence of the system.
Simulation experiments of formation control
Evaluation experiments
To verify the effectiveness of the proposed MAV/UAV formation control method, simulation experiments were performed in the environment of the MATLAB R2018a. The topology diagram for MAV/UAVs of one MAV and four UAVs is presented in Figure 5.
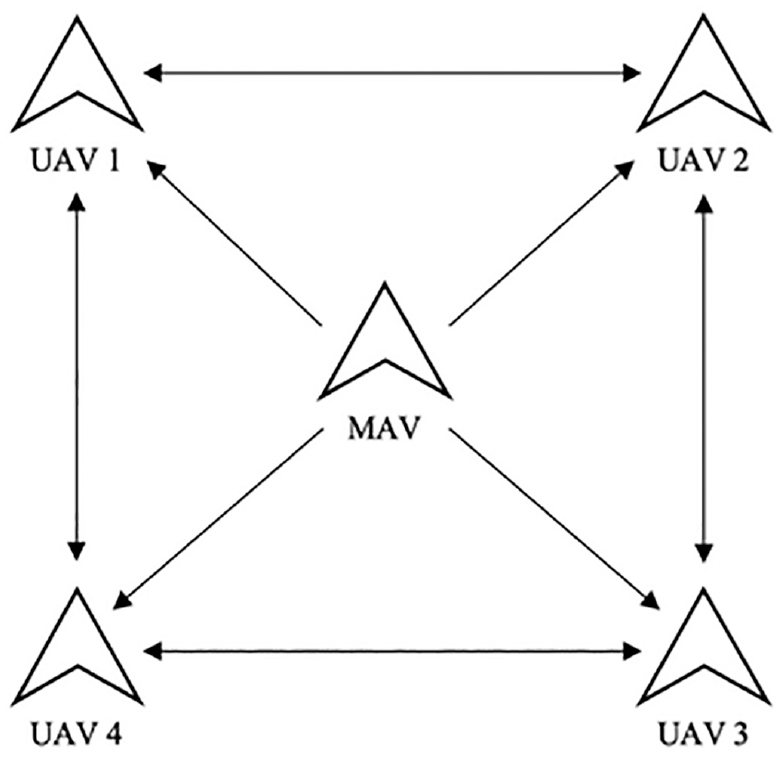
Topology diagram of MAV/UAV formation.
This section takes a coordinated battle system composed of one MAV and four UAVs as a case study. It is worth noting that this method is also effective when the number of UAVs or the topology changes. In the topological diagram of the MAV/UAVs, the MAV is embedded into the topology as geometric center. The adjacency matrix
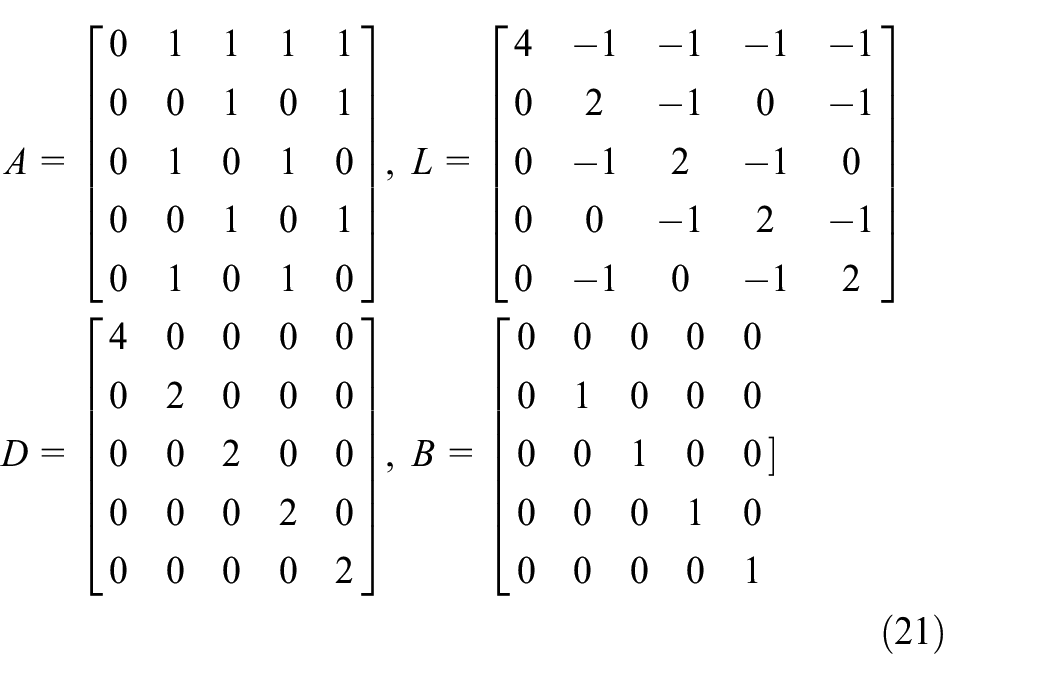
It is noted that the first row of adjacency matrix
In order to satisfy the constraint conditions of Theorem 1 from Zhang and Wei (2017), the control weight matrices in equation (12) are
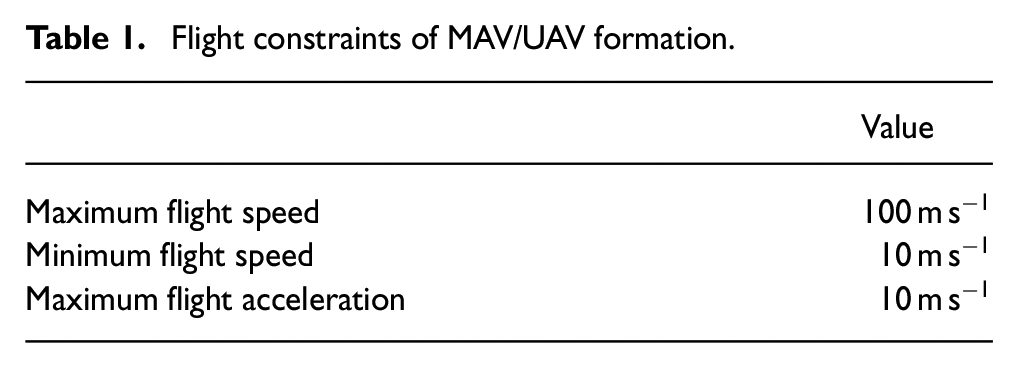
Flight constraints of MAV/UAV formation.
The initial flight conditions of MAV/UAV formation are presented in Table 2, including initial position, velocity, and attitude angles.
Initial conditions of MAV/UAV formation.
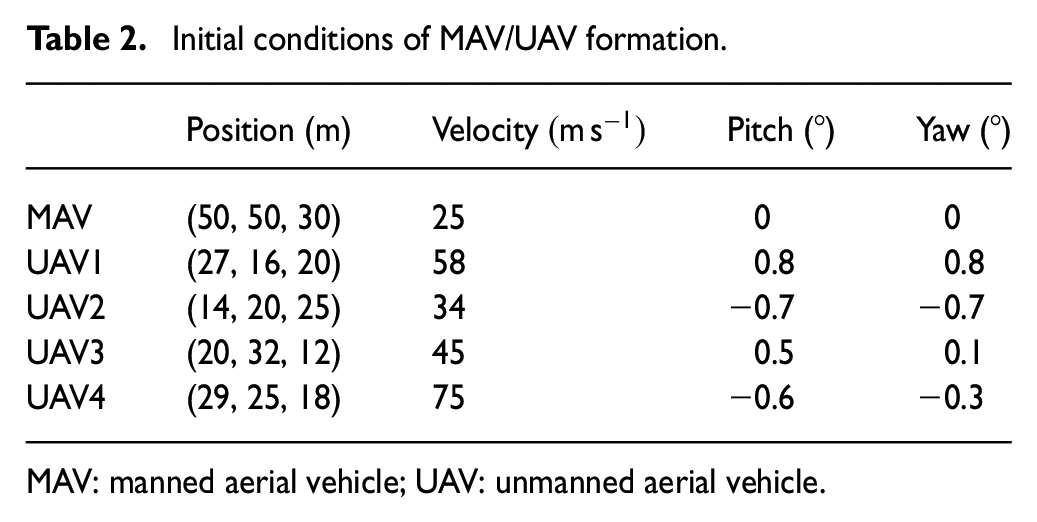
MAV: manned aerial vehicle; UAV: unmanned aerial vehicle.
The conditions of distance difference vectors between the MAV and UAVs in the three-dimensional space and the centroid are set as follows

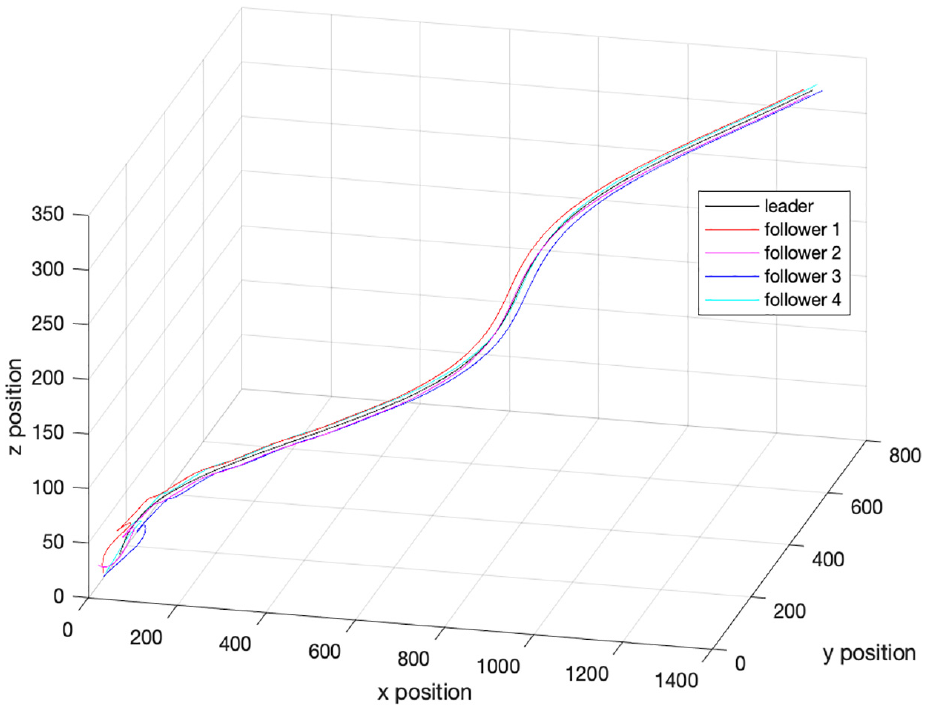
According to the above assumptions and initial conditions, the MAV/UAV formation starts and gather from different starting positions until the expected formation. The trajectory of MAV/UAV formation keeping is presented in Figure 6, where the trajectory of leader MAV is denoted by black solid line, and the trajectory of following UAVs are marked by four different color solid lines. It can be observed from Figure 6 that the four UAVs took off at different initial positions with different speeds, pitch angles, and yaw angles. At the same time, the UAVs fly in formation at a constant speed and tracking under the guidance of the leader MAV.
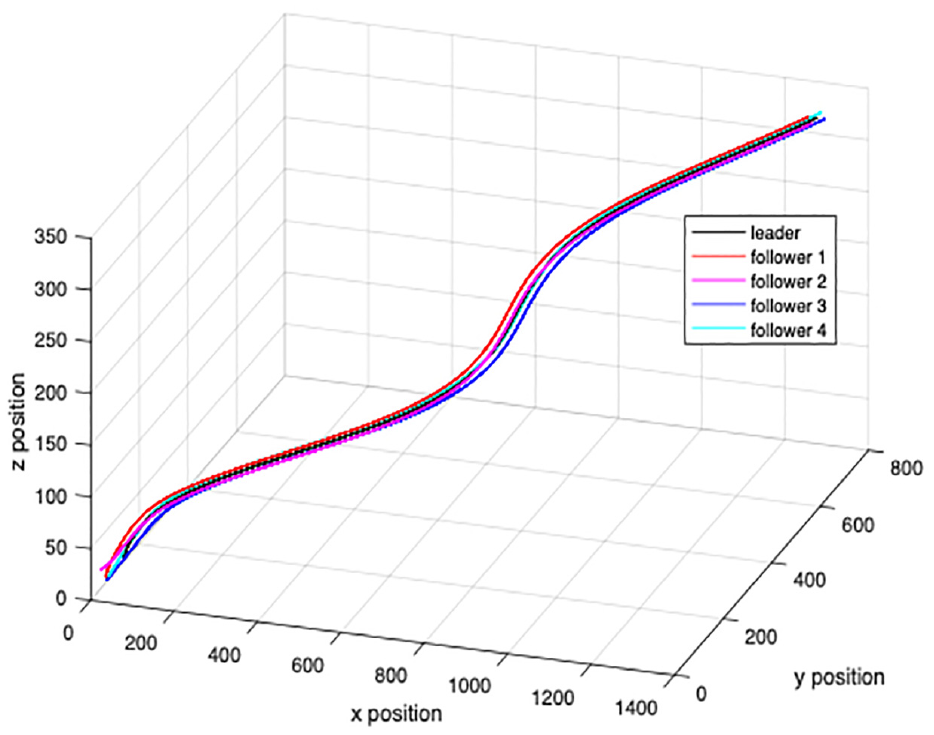
Trajectory of MAV/UAV formation keeping.
The error analysis for the proposed formation control method of position and velocity is presented in Figure 7, where the three-axis trajectory tracking errors and velocity error of four UAVs are denoted by different colored lines. It can be seen from Figure 7 that the UAVs converge to the flight trajectory of the leader at 20 seconds and then maintain the same relative distance and speed for stable flight. The average steady-state errors of three-axis trajectory tracking and velocity are
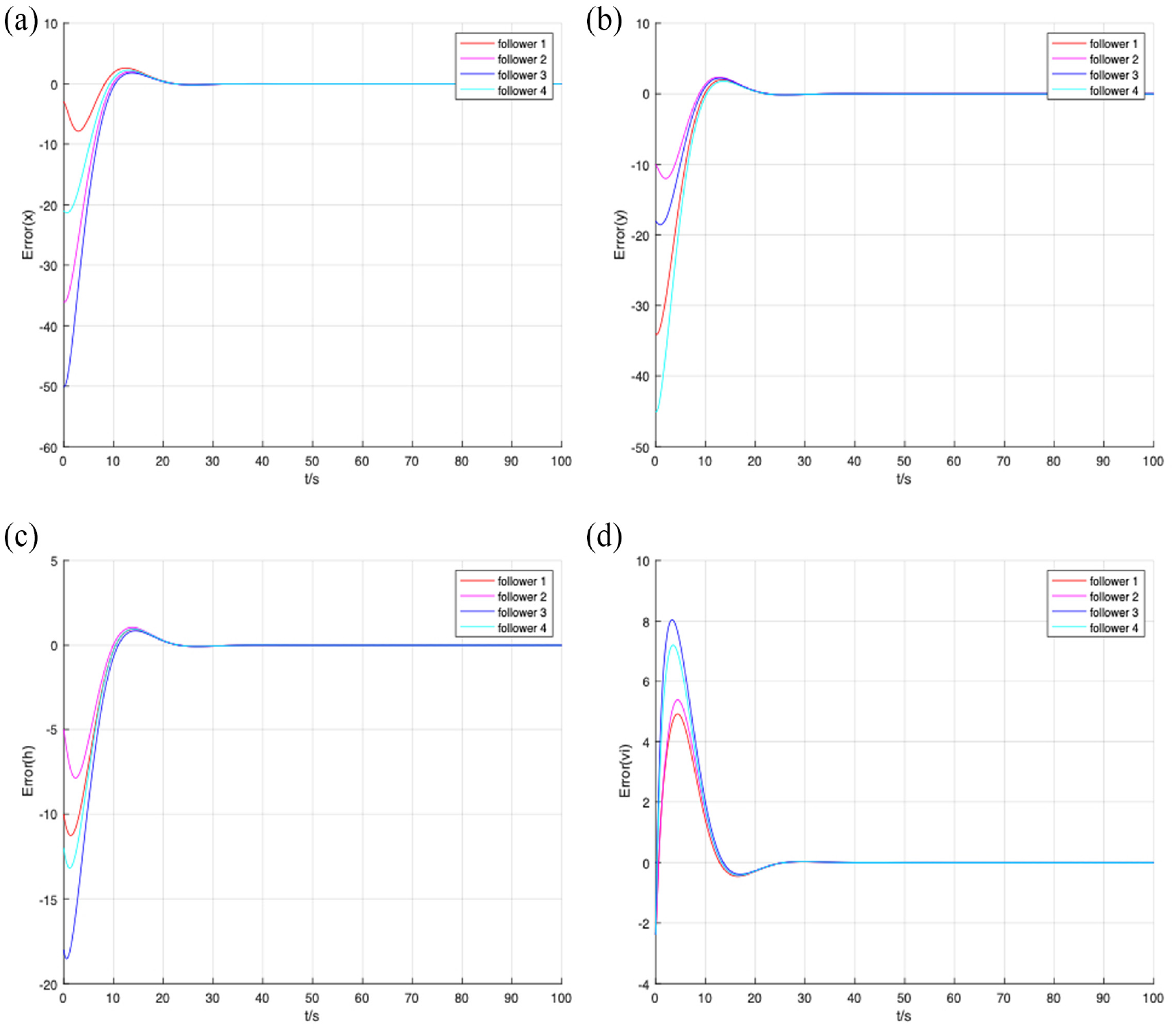
Error analysis for proposed formation control method: (a) error of X-axis, (b) error of Y-axis, (c) error of height, and (d) error of velocity.
Comparison experiments
In this section, in order to further to verify the feasibility and superiority of the proposed algorithm, corresponding simulation results are analyzed and compared with an classical nonlinear adaptive control method (Muslimov and Munasypov, 2021) under the same initial conditions and constraints.
The trajectory of MAV/UAV formation keeping by nonlinear adaptive control method is presented in Figure 8, where the trajectory of leader MAV and following UAVs is denoted by black and colored lines. It can be observed from Figure 8 that the formation control of UAVs failed to converge at the beginning of simulation, and then the UAVs fly in formation with a slower convergence rate. Figure 9 shows the position and velocity error analysis for the comparison formation control method, from which we can find that the overshoots and oscillations of position and velocity are much higher than our method. From the analysis of simulation results, it can be concluded that the system is stable within
Trajectory of MAV/UAV formation keeping of comparison formation control method.
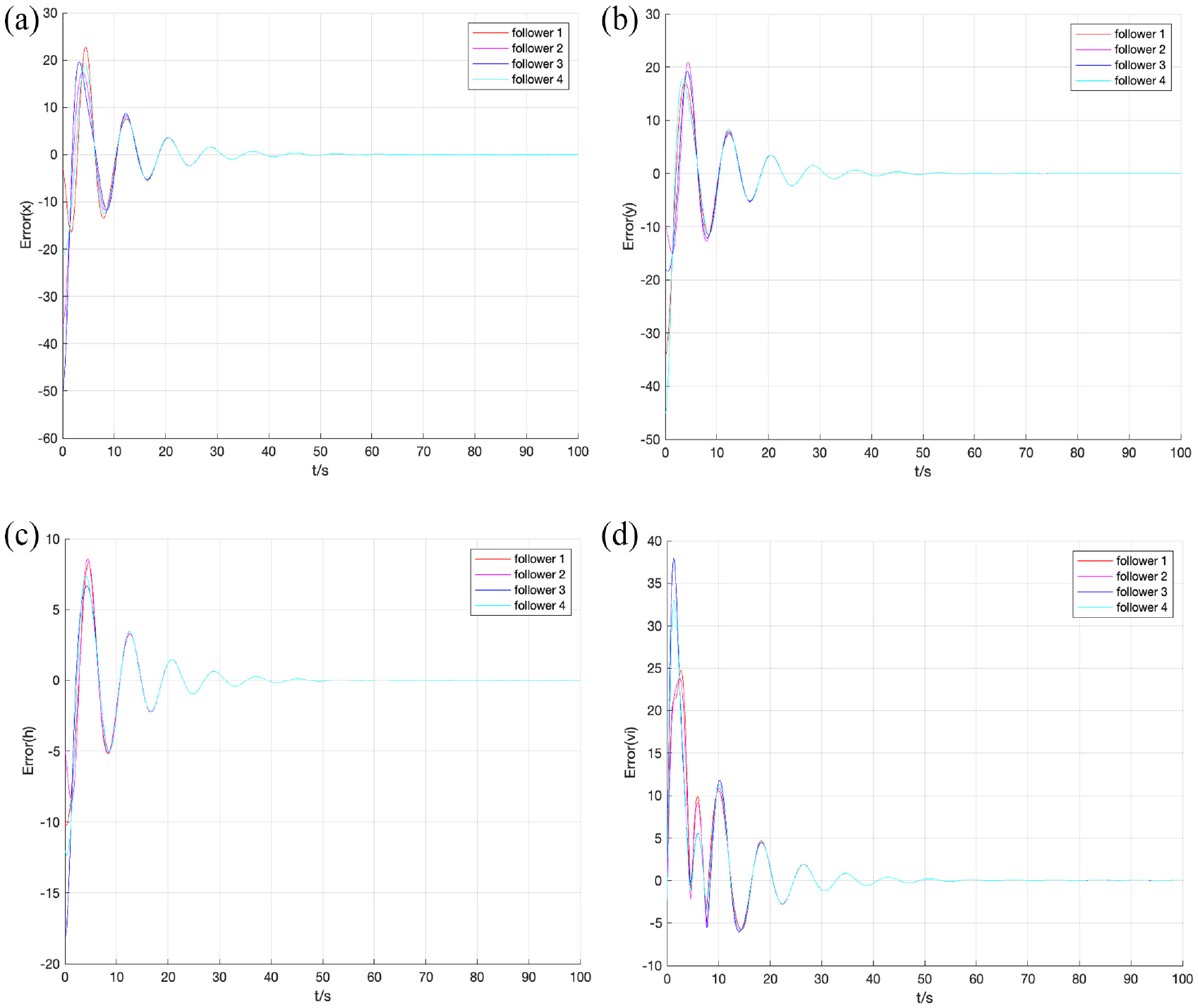
Error analysis of comparison formation control method: (a) error of X-axis, (b) error of Y-axis, (c) error of height, and (d) error of velocity.
In the comparison experiment, steady-state error is taken as a performance metric. The quantitative analysis results of comparison experiments are presented in Table 3. Comparison simulation results show that the distributed MAV/UAV formation control method proposed in this paper can obtain better path tracking, higher convergence rate, and dynamic response performance compared with the typical adaptive back-stepping control method. In addition, the proposed formation control method can suppress the influence of nonlinearity, uncertainty and communication topology.
Comparison experiments of MAV/UAV formation.

MAV: manned aerial vehicle; UAV: unmanned aerial vehicle.
Conclusion
Aiming at improving the combat effectiveness for formation control of MAV/UAV coordinated battle system, this research focuses on the problem of cooperative formation control considering information exchange conditions. The effectiveness of the proposed method is described below. The distributed structure with limited centralized is introduced into the MAV/UAV cooperative combat system, which improves the control level of MAV in the coordinated system by realizing the switching between autonomy and artificial intervention from the decision-making level. The second-order nonlinear dynamic model is introduced into the MAV/UAV coordinated battle system. The proposed precise nonlinear dynamic models are simplified by feedback linearization, which reduces the complexity of the formation system while maintaining the accuracy of the model. The robustness of the coordinated system is improved by introducing information exchange topology of MAV/UAV formation based on distributed structure and consensus protocol. Moreover, the overall stability of the MAV/UAV coordinated system was analyzed. The result of simulation and comparison demonstrate that the MAV/UAV coordinated battle system can converge to a steady state, keep the desired trajectory, and maintain the expected formation with less steady-state error and fewer timelines, which guarantees improving the operational effectiveness of MAV/UAV cooperative formation. In the future works, we will apply the formation control algorithm proposed in this paper to a complete cooperative combat system and devote ourselves to introducing system engineering theory into the demonstration of the entire system design.
Footnotes
Acknowledgements
First and foremost, the authors express their gratitude to their supervisor, Professor Cao Yunfeng, for his suggestions and instructions on this research. The authors also thank Dr Zhang Zhouyu, who gave them considerable help and advice on the manuscript. In addition, the authors appreciate all colleagues’ encouragement and support.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The study in this paper was supported by the National Natural Science Foundation of China (nos 61673211 and U1633105), the Open Project Funds for the Key Laboratory of Space Photoelectric Detection and Perception (Nanjing University of Aeronautics and Astronautics), the Ministry of Industry and Information Technology (no. NJ2020021-01), and the Fundamental Research Funds for the Central Universities (no. NJ2020021).