This paper is concerned with the outlier-resistant observer-based control problem for a class of interval type-2 (IT2) Takagi–Sugeno (T-S) fuzzy systems under adaptive event-triggered protocol (AETP). To improve the efficiency of resource utilization, AETP is mainly through an adjustable threshold parameter to dynamically schedule the data transmission, which occurs in the sensor-to-controller channel. In order to resist the abnormal measurement values, an output saturation composition is constructed in the observer. With the aid of Lyapunov theory, sufficient conditions are obtained to ensure the desired performance. Furthermore, the desired controller is designed for a class of IT2 T-S fuzzy systems. The combination of orthogonal decomposition and linear matrix inequalities is implemented to deal with the nonlinear coupling terms in the gain solving process. Finally, a numerical example is employed to justify the practicality and effectiveness of the proposed control scheme.
During the past few decades, fuzzy control represented by Takagi–Sugeno (T-S) fuzzy control (Takagi and Sugeno, 1985, 1992) has become a very effective tool for handling the stability analysis and controller synthesis of nonlinear systems (Cuesta et al., 1999). Generally speaking, T-S fuzzy model (FM) is a global model constituted by a series of linear sub-models smoothly connected through nonlinear fuzzy weights, which can narrow the gap between the nonlinear and linear systems. For now, considerable results based on T-S FM for stability analysis and performance design have been reported in the literature (Xie et al., 2017; Zhao et al., 2009a). For instance, the fault-tolerant controller has been designed in Huang and Yang (2014), Makni et al. (2020) with actuator or sensor faults for T-S FM. In addition, the problem of fault detection is discussed about T-S FM in Zhao et al. (2009b) and Zhuang et al. (2015). It should be noted that the type-1 T-S FM is invalid in dealing with uncertainty of linear or nonlinear systems. Therefore, interval type-2 (IT2) fuzzy systems are presented to address this difficulty.
In traditional T-S fuzzy control, it is usually assumed that the fuzzy weights only contain certain information. However, in practical applications, uncertainties are often unavoidable in nonlinear systems, such as uncertain parameters, unpredictable variables, and unknown perturbations. Thus, Mendel (2014) describes the traditional T-S FM, which is used to stand for nonlinear system with parameter uncertainty, it may lead to uncertain information contained in its fuzzy weights. In this case, the parallel distributed compensation (PDC) strategy will not be available to design the fuzzy feedback controller (Arino and Sala, 2008; Lam and Leung, 2005). Although the non-PDC strategy can handle T-S fuzzy systems with uncertain membership functions (MFs), it cannot effectively use the uncertain information hidden in the MFs. Therefore, it usually generates greater conservativeness to the stability conditions. In addition, the upper and lower MFs of IT2 fuzzy sets mean the higher and lower bounds of uncertainty. Accordingly, it can effectively address the uncertain information in nonlinear systems. Moreover, IT2 T-S FM (Tang et al., 2019) is considered as the set of infinite type-1 T-S FM with determined MFs. Consequently, it has a stronger ability to handle uncertainty compared to the type-1 T-S FM. In Lam and Seneviratne (2008), the stability constraints of fuzzy control system have been analyzed by using the uncertainty information included in the uncertain domain of the IT2 fuzzy set. In Lam et al. (2014), the IT2 fuzzy controller was used to make the system stable in the case of the imperfect premise matching.
In recent years, increasing attentions have been attracted on the control problem of networked systems with limited communication capability (Sun et al., 2016; Zou et al., 2017). Since the constraint of communication network bandwidth and hardware, there are data collisions and network congestion (Zou et al., 2016) in network-based data transmission. Consequently, it inevitably leads to network-induced phenomena, for example, data transmission time-delays and data loss. In order to avoid such phenomena, it is necessary to establish network communication protocols for relieving network burden, saving communication energy, and alleviating data congestion. According to the communication protocol, the sensors or controllers use the network, transmit and receive data in accordance with the protocol rules. In addition, there are various effects on networked systems caused by different communication protocols.
Since the limited energy and heavy communication burden in network transmission, it is necessary to introduce an appropriate scheduling protocol to manage the necessary data transmission. In general, event-triggering scheme (Ding et al., 2015; Jia et al., 2014; Li et al., 2016; Zhang et al., 2017), the threshold is used to adopted as a constant. Because the threshold parameters cannot be adjusted flexibly, it will lead to the redundant sampling signals pass through the limited communication network. Therefore, the adaptive threshold parameter adjustment method (Peng et al., 2017, 2018; Wang et al., 2019) can effectively improve this situation, and has attracted extensive attention. As described in Zhang et al. (2019), the threshold parameters in adaptive event-triggered protocol (AETP) are related to the data transmission rate in the communication network. In some practical cases, that is not reasonable and conservative. In Li et al. (2021), a novel adaptive scheme is used to manage the data transmission. In addition, the impact of communication congestion is also mitigated. In Tang and Li (2020), an adaptive event-triggered model predictive control synthesis algorithm based on a state observer and an adaptive event-triggering scheme is proposed, aiming to solve the problems of bounded disturbances and the presence of data loss.
In the networked system, due to sensor network failures, malicious network attacks, and unknown environmental changes, the measured values may be anomalous, which will cause a sudden increase in the innovation of the measured values (large deviations), thus further degrade the desired control performance. Therefore, it is very important to go for an observer/estimator that is insensitive to the measured outliers in order to reduce the impact. Also, this has received special attention from a wide range of researchers, and some relevant results are in the literature (Alessandri and Zaccarian, 2018; Dai and so, 2018; Mu and Yuen, 2015; Park, 2017; Vecchia and Splett, 1994). For example, in Fu et al. (2020), Shen et al. (2020), a filter with an output saturation composition was constructed to resist the abnormal measurement values. Further, in Fu et al. (2021), a dynamic saturation constraint is utilized to suppress the effect of outliers on the system performance. Meanwhile, a comparison is made with a fixed saturation constraint in simulation, and the effect is clearly better than the latter. However, the corresponding results for observer-based control problems are very scarce. Therefore, it is one of the main motivations of this paper to propose an outlier-resistant observer to attenuate its effect on the system.
For the above discussion, we can conclude that it is necessary to further systematically investigate outlier-resistant observer-based control problem under AETP in particular. The key contributions of the article are emphasized as follows: (1) the outlier-resistant observer-based control problem is, for the first time, addressed for the IT2 T-S fuzzy systems under adaptive event-triggered protocol (AETP). (2) In the analysis and synthesis problems of the IT2 T-S fuzzy systems, a novel general framework is established in order to deal with the impact of innovation saturation and the adaptive event-triggered protocol (AETP). (3) The sufficient conditions are derived to guarantee the stability and the performance of the closed-loop system. Meanwhile, using the orthogonal decomposition method, a computationally appealing algorithm is proposed for designing the desired controller;
The specific contributions of this paper are divided into four non-divisions. The first part briefly introduces the background and current state of research, the advantages and disadvantages of interval type-1 T-S fuzzy control and IT2 T-S fuzzy control, and the advantages of AETPs. In the second part, this paper develops a control model for IT2 T-S fuzzy systems based on an outlier-resistant observer, introducing an innovative saturation mechanism to mitigate the effect of measurement outliers on the system, that is, the saturation function is insensitive to measurement outliers. In section “Main results,” the paper gives sufficient conditions to guarantee the stability and performance of the closed-loop system. Also, an algorithm for designing a computationally attractive expectation controller is proposed using the orthogonal decomposition method. In the last part of the article, simulations are performed to demonstrate the practicality and validity of the experimental results.
Notation: the notations applied in the article are quite standard unless otherwise indicated. , represent the -dimensional Euclidean space and the set of all real matrices, respectively. The and mean transposition and inversion of A, which is a matrix, denotes its orthogonal basis. The identity matrix is represented by I, and 0 stands for the zero matrix with compatible dimensions. is the space of square-summable sequences. If not explicitly stated, matrices are assumed to have compatible dimensions.
Problem formulation and preliminaries
IT2 T-S fuzzy systems
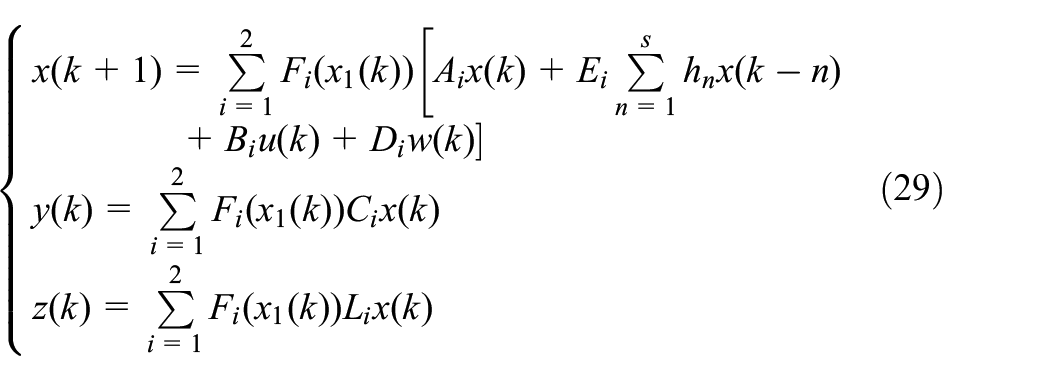
An IT2 fuzzy model is considered with r rules whose the consequent is a linear dynamical system. Rule i is described as follows:
Plant Rule i: IF is and is and … and is , THEN
where represents IT2 fuzzy set of Rule i. The is the premise variable with . r and denote two positive integers. , , and stand for the system state, measurement output, and controlled output, respectively. is the control input, and is the exogenous disturbance input. , , , and are known matrices with appropriate dimensions.
Next, the firing strength of Rule i is shown by the following intervals sets
where
and represent the lower and upper membership grades, respectively. and stand for the lower and upper MFs, respectively. Moreover, all the secondary grades of the IT2 fuzzy sets are indicated entirely by its own uncertainty footprint. Simplify . At the same time, the IT2 T-S fuzzy mode is denoted as follows
where
and are nonlinear weighting functions. They depend on the parameter uncertainties that satisfy .
Remark 1. The parameter uncertainties which are present in the nonlinear system may lead to uncertainties of MFs. As a result, the weighting functions and possibly exist the parameter uncertainties and cause uncertain . However, they are not necessary to be known in practical application, but they actually exist. Furthermore, it has been demonstrated that it is possible to reduce the conservativeness of desired controller by choosing reasonable values of the weighting coefficients in Lam et al. (2014). Specifically, we define and are associated with state variables as the nonlinear functions, but not fixed functions, in order to reduce the conservativeness.
AETP
The data transmission in this paper occurs from the sensor to the observer. To reduce energy consumption and alleviate data conflicts in this communication channel, the AETP is implemented to improve resource utilization. Meanwhile, AETP is discussed in this article as follows.
The event-triggered time instant sequence is , which can be determined by
where , and is the latest transmission instant of the measurement component of . is given weighted matrix. is the triggered threshold to be designed satisfying following adaptive law
where
where reflect the change rate of . Meanwhile, is the lower bound of and , and is the higher bound of .
By the above analysis, the latest triggering measurement output vector can be indicated as
and similarly, can also be expressed as
Therefore, is written as
Remark 2. Notice that the value of in equation (5) has two situations: one is and the other is . Moreover, when with , it can be derived that . In this case, the triggered threshold keeps increasing, which will lead to a lower communication frequency. In addition, the smaller can make a higher transmission frequency, which will create data congestion and cause network burden. Furthermore, if the parameter , we can know that , the adaptive transmission scheme (3) will be regarded as the traditional event-triggered protocol. Meanwhile, the adaptive scheme discussed in equation (3) will be periodic by selecting parameters . The threshold parameters of adaptive event-triggering are more sensitive in the regulation process compared to traditional static event-triggering, which is used in this paper. An innovative adaptive scheme is introduced to manage the data transfer, which not only ignores the inconvenient effects of inflexible point threshold adjustment, but also improves to some extent the unfavorable factors such as data flow congestion, thus making the system have a better performance.
Outlier-resistant observer-based controller
In this paper, innovation saturation is considered in the observer to get desired control performance, which has the same MFs with plant. Therefore, the overall IT2 T-S fuzzy observer is shown
where and are the estimate of and , respectively. denotes the observer gain matrix to be designed. The saturation function is indicated as
which satisfies
where
in which denotes the element of the saturation level vector . Note that, without loss of generality, the saturation level is taken as unity.
Remark 3. It should be noted that the innovation is constrained to a predetermined range subject to the saturation function . This avoids the deviation of the innovation anomaly from its usual range due to the abnormal measurement value. In addition, the saturation level can be determined based on engineering practice, and the saturation function is limited by the sector bounded condition (7), which facilitates the subsequent performance analysis. Moreover, the introduction of the outlier-resistant structure improves the reliability of the proposed observer. In particular, the designed observer (6) becomes a conventional Luenberger observer when tends to infinity. Meanwhile, to address the outlier problem, this paper introduces an observer with an innovative saturation mechanism that not only has many of the advantages of the Luenberger observer but also mitigates the impact of measurement outliers on the system, that is, the saturation function is insensitive to measurement outliers and is more helpful for observation.
In this paper, we employ a different MF from the plant to fuzzy controller parameters, which can improve the flexibility of the design.
Controller Rule c: IF is and is and … and is , THEN
where is the controller gain matrix to be determined. Next, the firing strength of Rule c is shown by the intervals sets as follows
where
where is fuzzy set. n is the number of controller premise variables . and represent the lower and upper membership grades, respectively. and stand for the lower and upper MFs, respectively. The global IT2 controller is shown by
where
and are nonlinear weighting functions. They depend on the parameter uncertainties that satisfy .
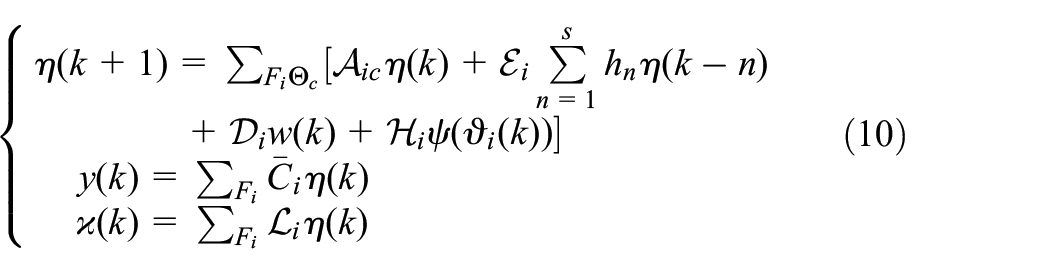
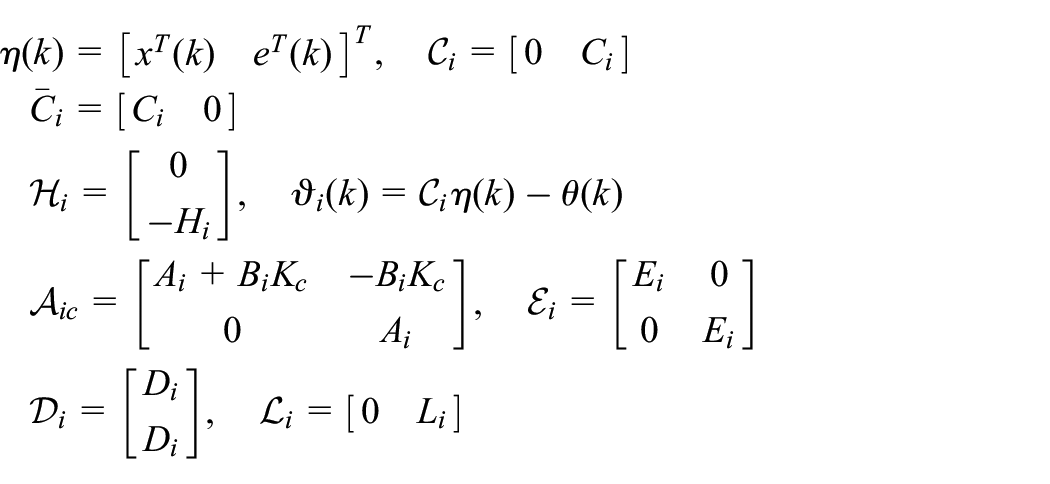
Define and . For convenience, simplify . We can obtain the following argument system
where
Remark 4. It can be seen that the plant and the observer share the same premise variables and MFs, which are different from the controller. Accordingly, they each have their own separate design. To some extent, this increases the flexibility of the controller design.
Definition 1. The augmented system (10) with is exponentially stable if there exist constants and satisfy
This paper aims to look for an observer-based controller with the form (9) which can satisfy both of the following requirements.
The argument system (10) is exponentially stable.
For a given scalar , the following performance is satisfied for and all nonzero
where .
Main results
Exponentially stability and performance analysis
In this section, we focus on analyzing the exponentially stable and performance of the augmented system (10) under innovation saturation and adaptive event trigger protocol.
Theorem 1. With the given gain matrices , and performance index . The system (10) is exponentially stable with while achieving the performance constraint (12) if there exist positive definite matrices P, L and positive scalars , such that
where
Proof. To get the purpose simply, the following Lyapunov–Krasovskii function is selected
By following the trajectory of the augmented system (10), then, the difference of the yields
Take equation (3) into account and we can get as follows
which can be written in compact form and satisfy the following condition
Moreover, on the basis of equations (7) and (19), we know that
where
By the Schur complement lemma, it follows immediately from equation (13) that . Taking the above analysis, we can clearly demonstrate exponentially stable via making a similar analysis to Wang et al. (2009). In what follows, let’s push the process forward and make performance analysis of the argument system (10) for . For this purpose, is constructed as follows
where
Equation can be determined by equation (13) because of the following
According to the nature of the inequality, the following changes are made on both sides of equation (22)
The proof of Theorem 1 is completed.
Observer and controller design under adaptive event trigger protocol
Theorem 2. With the given performance index . The system (10) is exponentially stable with while achieving the performance constraint (12) if there exist positive definite matrices , and L, and gain matrices , , matrix and positive scalars , such that
Furthermore, the gain matrix of the controller and observer is given by
where
Proof. Let and pre and post multiplying the inequality (13) by diag and its transposition, we have
where
It is clear that
which implies that
Accounting for equation (27) and making use of the variable substitution
Furthermore, we conclude that equation (26) is ensured by equation (23). Therefore, the remaining proof proceeds immediately from Theorem 1.
Remark 5. The observer-based controller design problem is solved by adopting the orthogonal decomposition proposed in Dong and Yang (2008). Specifically, the matrix and a special constructed free matrix are denoted to get over the difficulty from the products in Theorem 1. In addition, we know that the main results have established in Theorem 2, which provides sufficient conditions for designing the desired observer-based controller under the AETP.
Illustrative example
In this section, we give the following simulation example to verify the effectiveness of the proposed fuzzy controller and adaptive event trigger protocol in the IT2 T-S fuzzy system.
Now, take into account the following fuzzy model with two rules in the form of equation (1) as follows
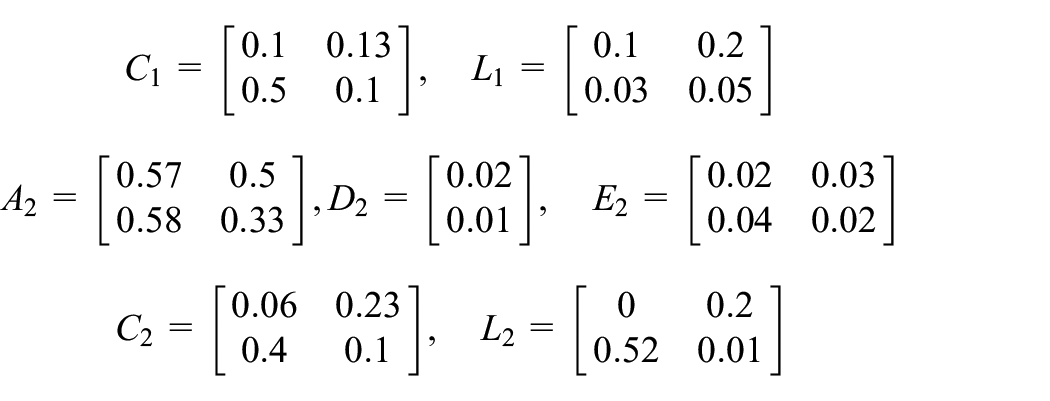
The model parameters are given below
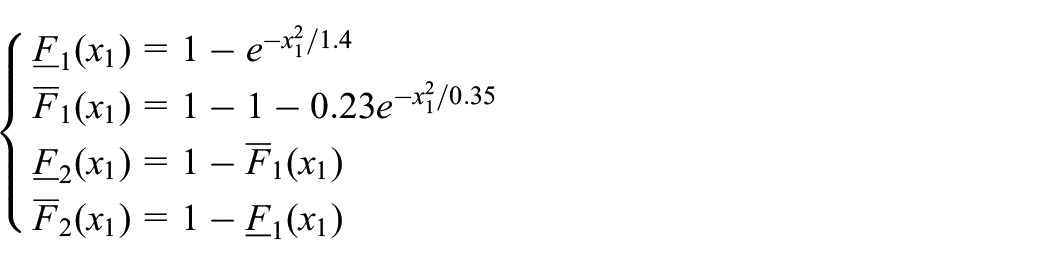
where the MFs of the plant are given
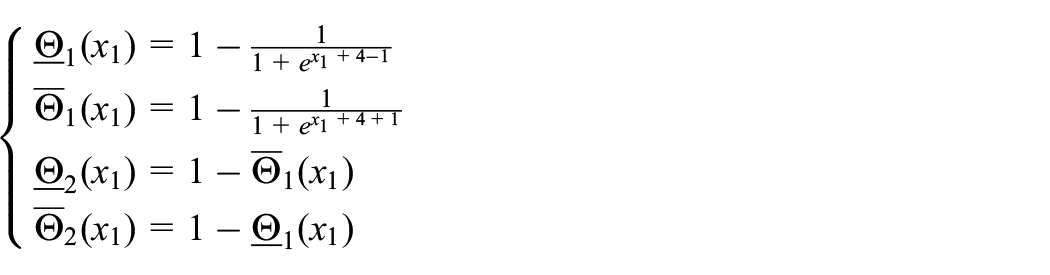
The MFs of the controller are given
where represents the first element of the system state.
In this example, we define the weighting functions under the fuzzy rules. and , , and .
We choose the distributed time-delays and the constant . The exogenous disturbance is taken as , and is selected to be 0.95. The sector-bounded parameter in equation (7) is chosen as . The triggered thresholds parameters in equation (4) are given as , , and . Moreover, the event-triggered weight matrix is selected as .
Using the MATLAB software with the YALMIP 3.0, we can solve equations (23) and (24) and get the following solutions
Therefore, the gain matrices are summarized by equation (25) as follows
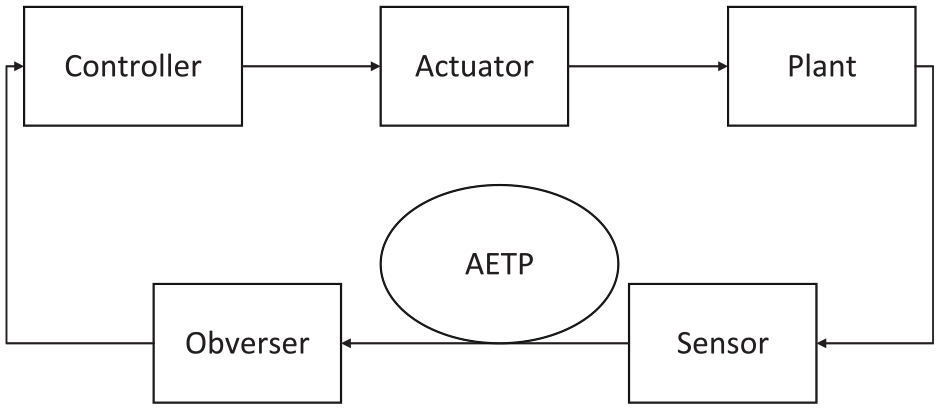
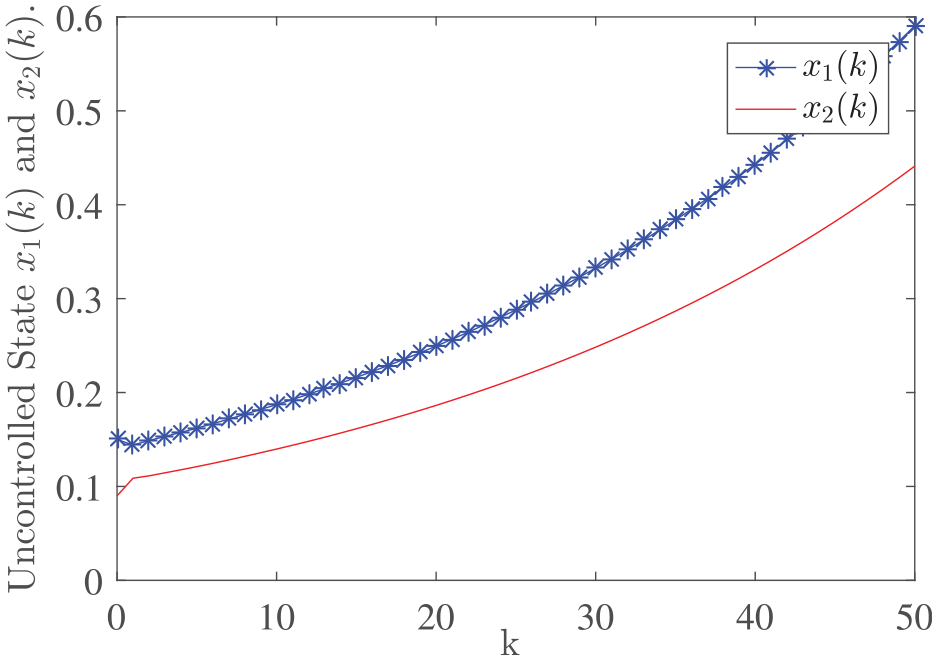
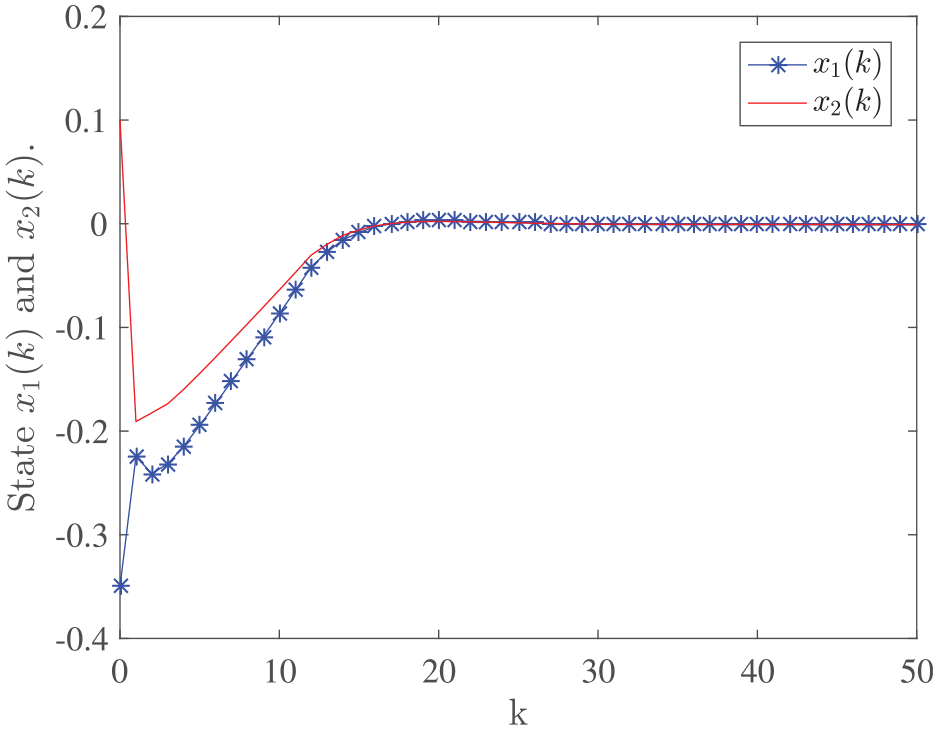
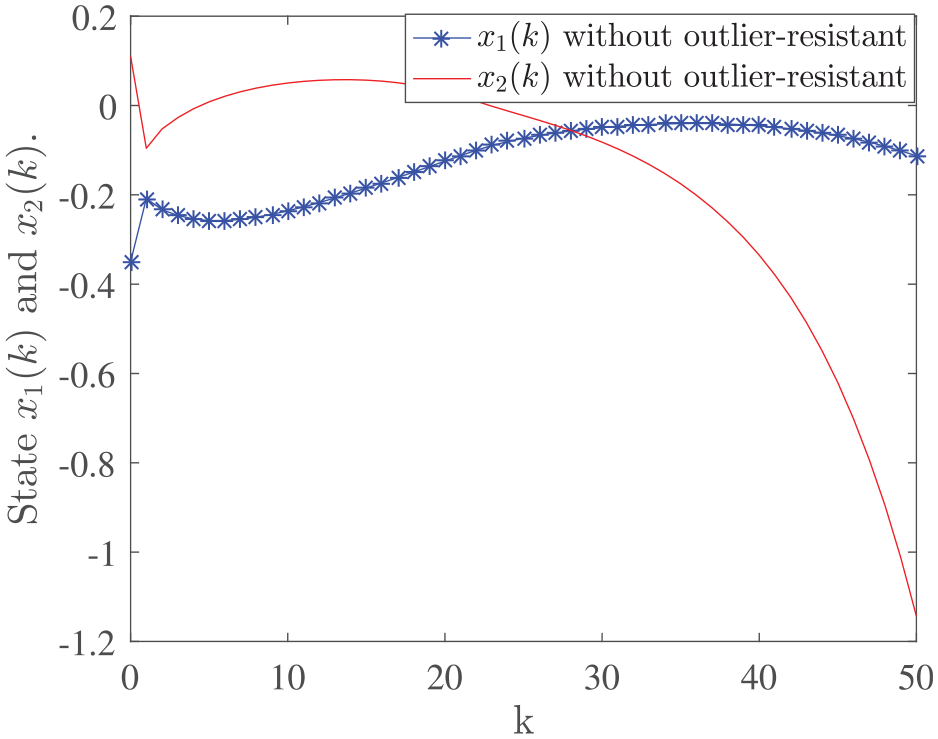
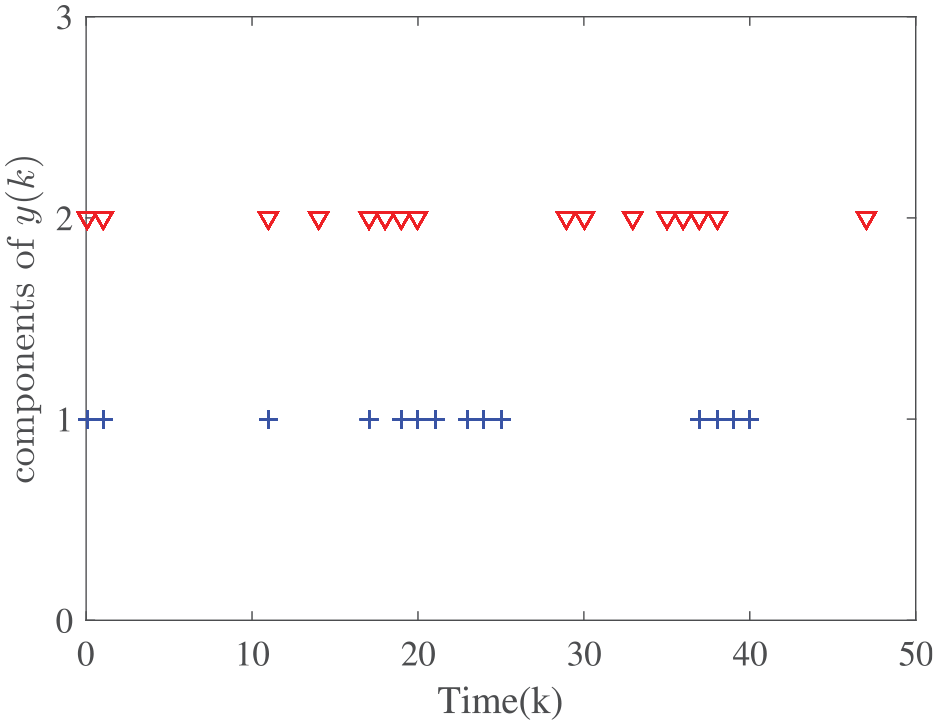
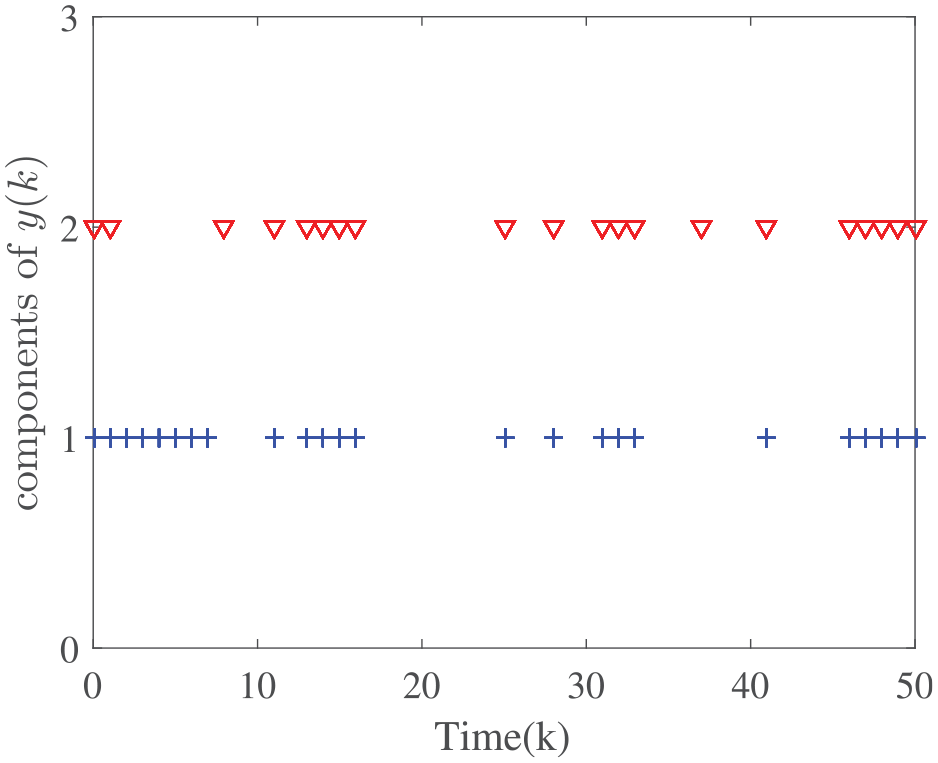
Figure 1 shows the system structure. The simulation results are presented in Figures 2–6. Specifically, Figure 2 shows the state trajectory of the system (10) without control, and it is clearly unstable. Moreover, Figure 3 plots the dynamics of the closed-loop system (10) with outlier-resistant control. Figure 4 depicts the system dynamics without outlier-resistant observer-based control (traditional Luenberger observer). Obviously, Figure 2 is more advantageous in terms of resistance to outliers. Figures 5 and 6 represent the triggering instant under AETP and traditional event-triggering mechanisms (with a fixed threshold), respectively. It can be seen that the triggering number of the former is significantly less than that of the latter, indicating that the AETP proposed in this paper is effective.
Structure of the control system.
Evolution of the system state without control.
Evolution of the system state with outlier-resistant control.
Evolution of the system state with control.
Adaptive event trigger protocol time instants for different components of .
traditional event-triggered scheme time instants for different components of .
Conclusion
In this paper, we have studied outlier-resistant observer-based control problem for the IT2 T-S fuzzy discrete-time systems with distributed delays under AETP. Supported by Lyapunov stability theory, the sufficient conditions are derived to guarantee the stability of the controlled fuzzy system as well as ensure the prescribed performance. Moreover, the relevant control problem is reduced to a linear convex optimization problem using orthogonal decomposition and LMI technique. The numerical simulation results indicate the effectiveness and reliability of the proposed control method. It needs to be noted that the primary results of this paper can be promoted to other fields, such as the occurrence of more complex network-induced phenomena or dynamic saturation constraint. It is useful to research our future research topics.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the National Natural Science Foundation of China (grant no. 61603255) and the Shanghai Twilight Program of China (grant no. 18CG52).
ORCID iD
Sunjie Zhang
References
1.
AlessandriAZaccarianL (2018) Stubborn state observers for linear time-invariant systems. Automatica88: 1–9.
2.
ArinoCSalaA (2008) Extensions to “stability analysis of fuzzy control systems subject to uncertain grades of membership.”IEEE Transactions on Systems, Man and Cybernrtics, Part B (Cybernetics)38(2): 558–563.
3.
CuestaFGordilloFAracilJ, et al. (1999) Stability analysis of nonlinear multivariable Takagi-Sugeno fuzzy control systems. IEEE Transactions on Fuzzy Systems7(5): 508–520.
4.
DaiJSSoHC (2018) Sparse Bayesian learning approach for outlier-resistant direction-of-arrival estimation. IEEE Transactions on Signal Processing66(3): 744–756.
5.
DingDRWangZDShenB, et al. (2015) Event-triggered distributed state estimation with packet dropouts through sensor networks. IET Control Theory & Applications9(13): 1948–1955.
6.
DongJXYangGH (2008) Robust static output feedback control for linear discrete-time systems with time-varying uncertainties. Systems & Control Letters57(2): 123–131.
7.
FuHJDongHLHanF, et al. (2020) Outlier-resistant filtering for a class of networked systems under Round-Robin protocol. Neurocomputing403: 133–142.
8.
FuHJLiJHHanF, et al. (2021) Outlier-resistant observer-based PID control under stochastic communication protocol. Applied Mathematics and Computation411: 126535.
9.
HuangSJYangGH (2014) Fault tolerant controller design for T-S fuzzy systems with time-varying delay and actuator faults: A k-step fault-estimation approach. IEEE Transactions on Fuzzy Systems22(6): 1526–1540.
10.
JiaXCChiXBHanQL, et al. (2014) Event-triggered fuzzy control for a class of nonlinear networked control systems using the deviation bounds of asynchronous normalized membership functions. Information Sciences259: 100–117.
11.
LamHKLeungFHF (2005) Stability analysis of fuzzy control systems subject to uncertain grades of membership. IEEE Transactions on Systems, Man and Cybernrtics, Part B (Cybernetics)35(6): 1322–1325.
12.
LamHKSeneviratneLD (2008) Stability analysis of interval type-2 fuzzy-model-based control systems. IEEE Transactions on Systems, Man and Cybernrtics, Part B (Cybernetics)38(3): 617–628.
13.
LamHKLiHYDetersC, et al. (2014) Control design for interval type-2 fuzzy systems under imperfect premise matching. IEEE Transactions on Industrial Electronics61(2): 956–968.
14.
LiQShenBLiuYR, et al. (2016) Event-triggered state estimation for discrete-time stochastic genetic regulatory networks with Markovian jumping parameters and time-varying delays. Neurocomputing174: 912–920.
15.
LiXWeiGLDingDR (2021) Distributed resilient interval estimation for sensor networks under aperiodic denial-of-service attacks and adaptive event-triggered protocols. Applied Mathematics and Computation409: 126371.
16.
MakniSBouattourMEl HajjajiA, et al. (2020) Robust fault tolerant control based on adaptive observer for Takagi-Sugeno fuzzy systems with sensor and actuator faults: Application to single-link manipulator. Transactions of the Institute of Measurement and Control42(12): 2308–2323.
17.
MendelJM (2014) General type-2 fuzzy logic systems made simple: A tutorial. IEEE Transactions on Fuzzy Systems22(5): 1162–1182.
18.
MuHQYuenKV (2015) Novel outlier-resistant extended Kalman filter for robust online structural identification. Journal of Engineering Mechanics141(1): 04014100.
19.
ParkH (2017) Outlier-resistant high-dimensional regression modelling based on distribution-free outlier detection and tuning parameter selection. Journal of Statistical Computation and Simulation87(9): 1799–1812.
20.
PengCYangMJZhangJ, et al. (2017) Network-based control for T-S fuzzy systems with an adaptive event-triggered communication scheme. Fuzzy Sets and Systems329: 61–76.
21.
PengCZhangJYanHC (2018) Adaptive event-triggering load frequency control for network-based power systems. IEEE Transactions on Industrial Electronics65(2): 1685–1694.
22.
ShenYXWangZDShenB, et al. (2020) Outlier-resistant recursive filtering for multisensor multirate networked systems under weighted try-once-discard protocol. IEEE Transactions on Cybernetics51: 4897–4908.
23.
SunXMLiuKZWenCY, et al. (2016) Predictive control of nonlinear continuous networked control systems with large time-varying transmission delays and transmission protocols. Automatica64: 76–85.
24.
TakagiTSugenoM (1985) Fuzzy identification of systems and its applications to modeling and control. IEEE Transactions on Systems, Man, and Cybernetics15(1): 116–132.
25.
TanakaKSugenoM (1992) Stability analysis and design of fuzzy control systems. Fuzzy Sets and Systems45(2): 135–156.
26.
TangXMLiY (2020) Adaptive event-triggered output feedback predictive control for nonlinear network systems represented by interval type-2 T-S fuzzy model. In: 2020 Chinese automation congress (CAC), Shanghai, China, 6–8 November, pp. 6590–6595. New York: IEEE.
27.
TangXMDengLQuHC (2019) Predictive control for networked interval type-2 T-S fuzzy system via an event-triggered dynamic output feedback scheme. IEEE Transactions on Fuzzy Systems27(8): 1573–1586.
28.
VecchiaDFSplettJD (1994) Outlier-resistant methods for estimation and model fitting. ISA Transactions33(4): 411–420.
29.
WangYYXiaYQAhnCK, et al. (2019) Exponential stabilization of Takagi-Sugeno fuzzy systems with aperiodic sampling: An aperiodic adaptive event-triggered method. IEEE Transactions on Systems, Man, and Cybernetics49(2): 444–454.
30.
WangZDHoDWCLiuYR, et al. (2009) Robust control for a class of nonlinear discrete time-delay stochastic systems with missing measurements. Automatica45(3): 684–691.
31.
XieWBLimCCZhangJ, et al. (2017) New approaches to observer design and stability analysis for T-S fuzzy system with multiplicative noise. Journal of the Franklin Institute354(2): 887–901.
32.
ZhangHWangZPYanHC, et al. (2019) Adaptive event-triggered transmission scheme and filtering co-design over a filtering network with switching topology. IEEE Transactions on Cybernetics49(12): 4296–4307.
33.
ZhangWBWangZDLiuYR, et al. (2017) Event-based state estimation for a class of complex networks with time-varying delays: A comparison principle approach. Physics Letters A381(1): 10–18.
34.
ZhaoYGaoHJLamJ, et al. (2009a) Stability and stabilization of delayed T-S fuzzy systems: A delay partitioning approach. IEEE Transactions on Fuzzy Systems17(4): 750–762.
35.
ZhaoYLamJGaoHJ (2009b) Fault detection for fuzzy systems with intermittent measurements. IEEE Transactions on Fuzzy Systems17(2): 398–410.
36.
ZhuangGMLiYMLuJW (2015) Fuzzy fault-detection filtering for uncertain stochastic time-delay systems with randomly missing data. Transactions of the Institute of Measurement and Control37(2): 242–264.
37.
ZouLWangZDGaoHJ (2016) Observer-based control of networked systems with stochastic communication protocol: The finite horizon case. Automatica63: 366–373.
38.
ZouLWangZDGaoHJ, et al. (2017) Finite-horizon consensus control of time-varying multi-agent systems with stochastic communication protocol. IEEE Transactions on Cybernetics47(8): 1830–1840.