
Abstract
Robotic manipulators are nowadays widely used in various underwater scenarios, but their motion control remains a challenging task due to hydrodynamic effects. This article proposes a novel adaptive fuzzy sliding mode control (AFSMC) strategy for precise and robust control of underwater manipulators. To simulate the movement of the robotic manipulators in the underwater environment, the Unified Robot Description Format (URDF) file of a custom-designed electric underwater manipulator is imported into the Simscape Multibody and the hydrodynamic disturbance is modeled according to Morison’s equation. Furthermore, the proposed control strategy takes advantage of the universal approximation capability of fuzzy systems to avoid chattering and observe disturbances by adjusting the control gains of classical sliding mode control (CSMC). And adaptive laws are designed to update the parameters of the fuzzy systems. The strong friction caused by the seal is also compensated by actual test data. In the simulation experiments, a special environment of water flow and variable loads is considered. The results demonstrate that the AFSMC strategy can achieve high precision and strong robustness against disturbances for trajectory tracking. More importantly, the chattering caused by CSMC can be eliminated and the hydrodynamic disturbance can be estimated with high precision through the proposed control strategy.
Keywords
Introduction
Robotic manipulators have started playing pivotal roles in the underwater world to protect workers from workplace hazards in complex and unpredictable environments. In recent years, many underwater manipulators have been developed for different tasks, including inspection (Wang et al., 2019), hull cleaning (Long et al., 2022), marine products grasping (Cai et al., 2020), sea mining exploration (Di Vito et al., 2021), and cooperative object transportation (Heshmati-Alamdari et al., 2021). Compared with traditional industrial manipulators, there are many technical difficulties in controlling an underwater manipulator because of the hydrodynamic influence, unknown external disturbances, and uncertainty in the dynamical model. For more precise control of underwater manipulators, many studies have been carried out in modeling and controller design.
A crucial component of precise automatic control for underwater manipulators is developing the hydrodynamic model. Morison’s equation was first proposed in 1950 and has since been extensively used to calculate the drag force and virtual mass force caused by the wave (Morison et al., 1950). Recently, a novel dynamic model for multi-link underwater manipulators has been developed using Lagrangian mechanics and Morison’s equation (Yuguang and Fan, 2019). This simplified model can well simulate the disturbance of the robotic manipulators in the underwater environment. In addition, flow visualization, theoretical analysis, experimental measurements, and computational fluid dynamics (CFD) are also gradually being employed to analyze the hydrodynamic forces and coefficients of robotic manipulators (Kolodziejczyk, 2018; McLain and Rock, 1998).
The most widely used control methods for underwater manipulators are proportional–integral–derivative (PID) control, model-based control, sliding mode control (SMC), neural control, and fuzzy control (Sivčev et al., 2018). SMC has been proven to be a powerful nonlinear control method because of its strong robustness and high convergence speed (Utkin, 1977). However, various problems, especially the chattering problem, make the application of SMC challenging in real-world scenarios (Young et al., 1999). Therefore, many methods have been proposed by researchers to investigate the improvement of SMC in the corresponding robotic fields, which include reaching law (Tang et al., 2021), terminal SMC (Hao et al., 2021), fuzzy SMC (Guo and Woo, 2003; Xiuxiang et al., 2018), neural networks (Zhu et al., 2020), reinforcement learning (Xie et al., 2020), and model predictive control (Nicolis et al., 2020). Among them, thanks to the universal approximation capability of fuzzy systems, fuzzy SMC is an effective strategy to avoid chattering caused by classical sliding mode control (CSMC).
For dynamic modeling and hydrodynamic coefficient determination of underwater manipulators, accurate estimation of hydrodynamic disturbance is meaningful. The combination of SMC and disturbance estimation methods is a popular and promising field due to the effective utilization of disturbance information. Disturbance observer is a classical and effective method for estimation (Dou and Yue, 2022; Yin et al., 2022). Time-delay control is also a robust and accurate scheme to estimate the dynamics of robotic manipulators with uncertainties (Baek et al., 2017; Lee et al., 2017). Furthermore, some researchers utilized the properties of fuzzy systems in combination with SMC for disturbance estimation (Ravandi et al., 2018; Van and Ge, 2021).
However, the greater friction of electric underwater manipulators due to joint sealing has not been treated in much detail in previous studies. And existing studies rarely consider the operation of underwater manipulators with water flow. In addition, very little attention has been paid to the role of the adaptive fuzzy sliding mode control (AFSMC) strategy in hydrodynamic disturbance estimation for underwater manipulators. Inspired by the above discussion, this paper is dedicated to developing an AFSMC that enables manipulators to operate efficiently and accurately in underwater moving water environments.
Major contributions can be listed as follows:
A hydrodynamic model applicable to underwater manipulators in water tunnels with water flow is developed and verified by simulation experiments.
Based on CSMC, fuzzy system, adaptive law, and friction compensation, an AFSMC for electric underwater manipulators is designed to overcome the chattering problem and estimate hydrodynamic disturbance.
A visual simulation environment for underwater manipulators is constructed through Simscape Multibody, and the effectiveness of the proposed control strategy is verified by simulation experiments with water flow and variable loads.
The remaining part of the paper proceeds as follows: In section “Modeling,” the underwater manipulator and hydrodynamic disturbance are modeled in MATLAB/Simulink environment. In section “Controller design,” the detailed design process of the proposed AFSMC strategy is provided and the stability of the system is proved mathematically. In section “Experiments and results,” numerical simulations are carried out and the results are presented to prove the superiority of the proposed control strategy. In section “Conclusion,” the overall works and findings of this paper are summarized.
Modeling
Mechanical model
Nowadays, water tunnels are crucial for human society because of the need to transport water to areas with large populations or agriculture (Alp and Apaydin, 2019). To replace workers of dangerous repair work in water tunnels, a remote electric underwater manipulator is designed. As shown in Figure 1, the manipulator has three joints and the end is equipped with a gripper to pick up the working tools. The angle values of these joints are expressed as
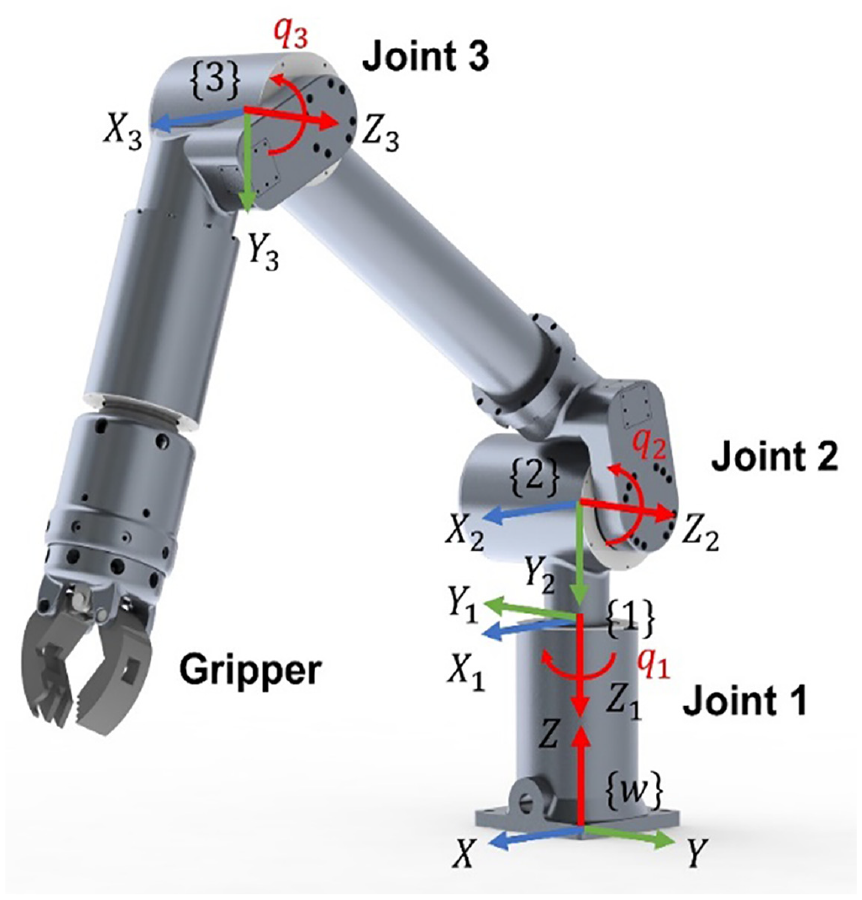
Mechanical model of the custom-designed electric underwater manipulator.
The main physical parameters of the underwater manipulator are given in Table 1.
Physical parameters of the manipulator.

Dynamic model
According to the Lagrangian mechanics, the dynamic model of the 3-degree-of-freedom (DOF) underwater manipulator is given by

where
In addition, the dynamic model of the manipulator also has some important properties, which is crucial in controller design. First, the inertial matrix

where
Joint friction
Nonlinear friction torque is one of the main causes of vibration in manipulators at low speeds, and this torque is further increased by the sealing (Armstrong-Helouvry, 1993). In the early 20th century, Stribeck (1902) investigated the relationship between friction and velocity, and his model has been widely used since then. The joint friction torque

where
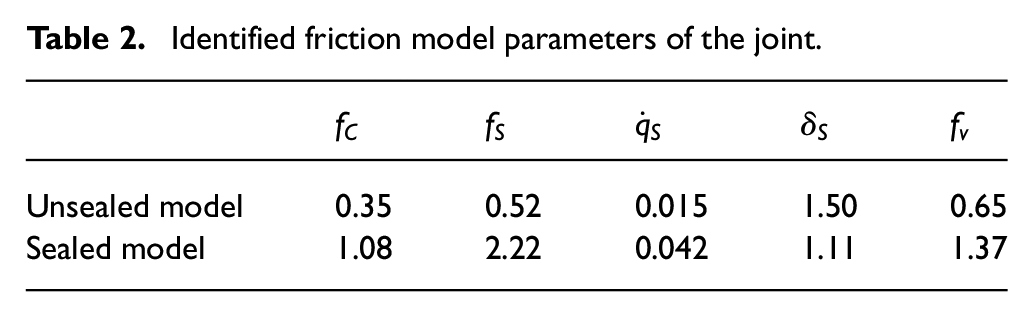
Three identical actuators are used as joints of the manipulator, so the friction torque of each joint is the same. To identify the joint friction parameters, experimental tests are conducted on unsealed and sealed joints. Friction torque is estimated from the measured current values. Both unsealed and sealed curves are consistent with the Stribeck model. The identified friction model parameters of the joint are given in Table 2. The friction torque in sealed joints is about five times greater than in unsealed joints, so the compensation of joint friction torque is necessary for precise control of the underwater manipulator.
Identified friction model parameters of the joint.
Therefore, the dynamic model of the manipulator is extended to

where
Hydrodynamic influence
To simplify the model, the links of the underwater manipulator are approximated as cylindrical elements. According to the report by Schjølberg and Fossen, the following hydrodynamical forces are acting on the manipulator (Schjølberg and Fossen, 1994).
The buoyancy force is an upward force, opposite to the direction of gravity, and it acts on the center of mass of the links. The equation of the buoyancy force is given by

where
When the manipulator moves underwater, the viscous property of the fluid causes the drag force and the attached accelerating fluid causes the additional mass force. Morison’s equation is widely used to calculate these two forces. The equations are given as follows


where
In water conveyance tunnels, the velocity of water flow is generally 0–3 m/s, and its direction is perpendicular to the direction of gravity (Nabipour et al., 2020). So

where
The lift force is generated because of the airfoil structure of the object. The underwater manipulator does not have such a structure, so the lift force is not considered. The vortex shedding induces oscillatory forces on the links in both the drag and the lift direction. This force is also not considered because of the little effect on objects with small cross sections.
Therefore, the dynamic model of the manipulator is extended to

where
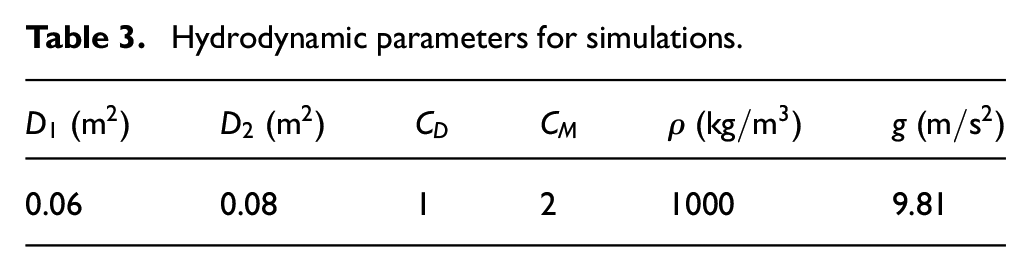
Hydrodynamic parameters for simulations.
Controller design
CSMC
In this paper, the controllers are designed to track the desired trajectory. The desired joint position is defined as

The sliding surface is designed as

where
Equation (11) ensures

when

In CSMC, the control input

where
Substituting equation (14) into equation (9) obtains

where

To prove the stability of the manipulator system, the Lyapunov function candidate is defined as

Since
Using equations (3), (9), and (14), it can be derived that
It can be derived that
According to Lyapunov’s second method, the asymptotic stability of the underwater manipulator system can be proved.
AFSMC
To suppress the chatter problem caused by CSMC, the chattering factor

where the element
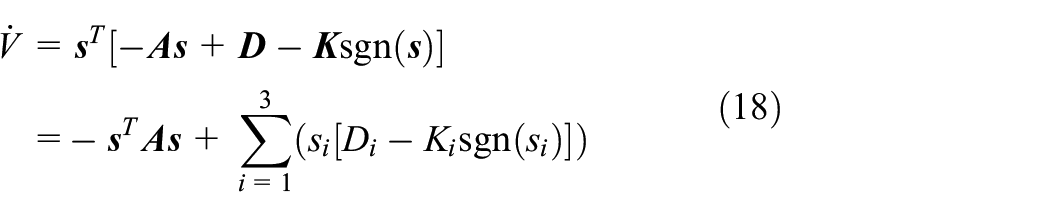
So equation (18) is rewritten as

To ensure
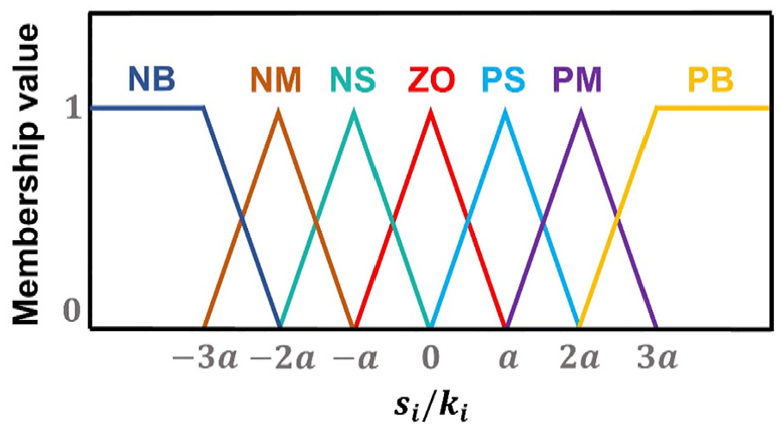
Membership functions of the fuzzy system.
The fuzzy rule base is designed as follows:
R1: IF
R2: IF
R3: IF
R4: IF
R5: IF
R6: IF
R7: IF
A fuzzy system is generally composed of fuzzification, fuzzy rule base, fuzzy inference engine, and defuzzification. And the four units can be expressed as a mathematical formula. Using singleton fuzzification, center average defuzzification, and Mamdani implication, the output

where
Substituting equation (19) into equation (9), we get

where
Define the optimal vector of parameters as

where
Many different kinds of fuzzy systems have been proven to have the universal approximation property (Zeng and Singh, 1995). And the property is expected to estimate the disturbance

Thus, equation (21) can be rewritten as

where
The adaptive law is designed as

To prove the stability of the manipulator system, the Lyapunov function candidate is defined as

Since
Using equations (20), (25), and (26), it can be derived that
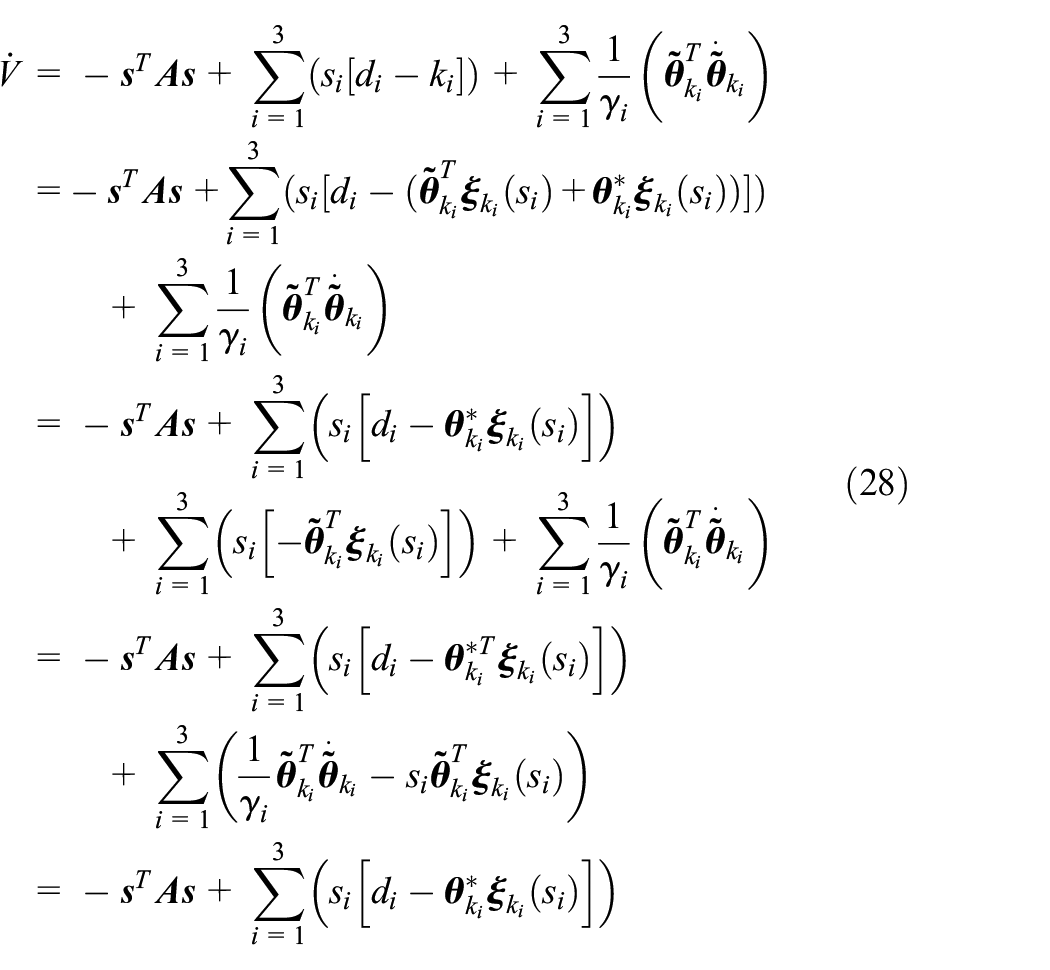
From equation (24), the error

Then

where
Therefore,

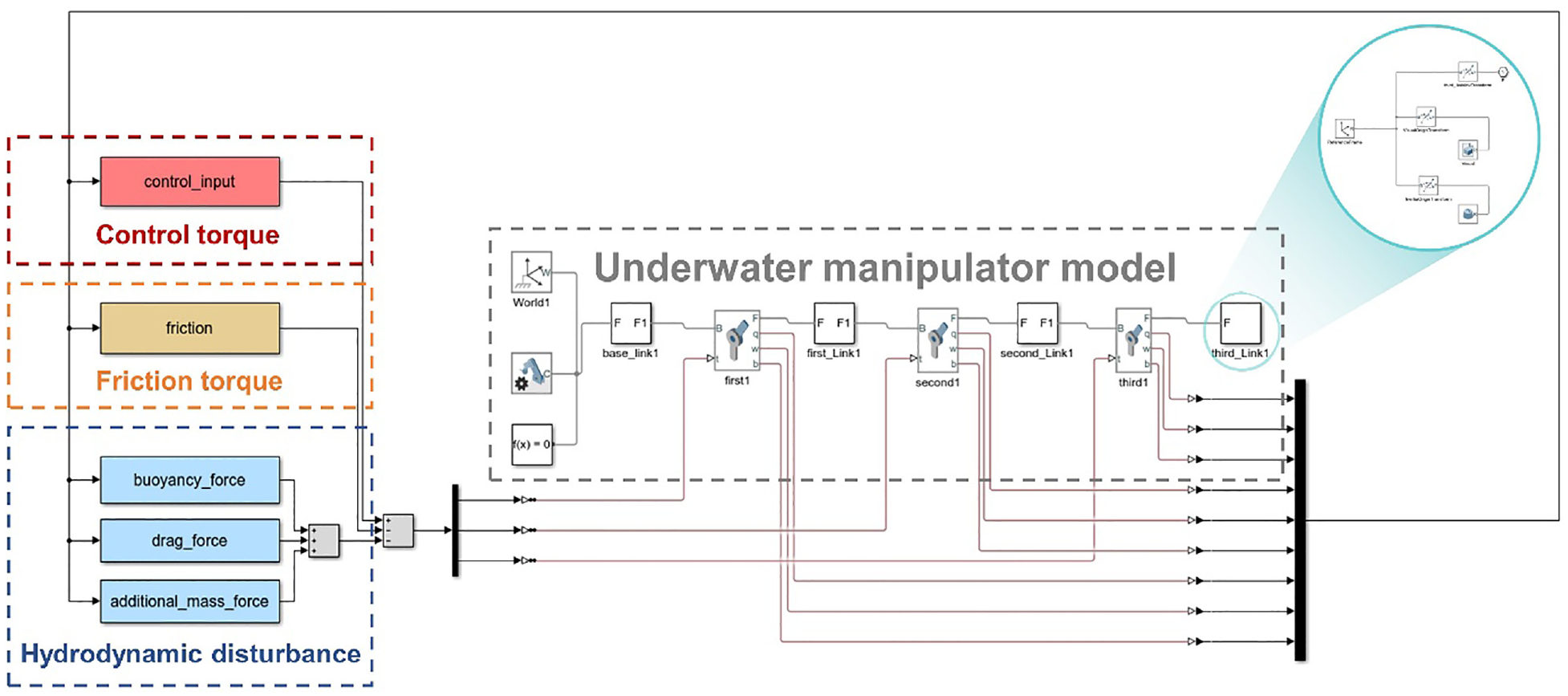
The architecture of the control system is demonstrated in Figure 3. The blue boxes represent the proposed control strategy, consisting of CSMC, fuzzy systems, adaptive laws, and friction compensation. The green box represents the simulation environment. The model of the physical system is established through the Simscape Multibody toolbox of MATLAB/Simulink. The Unified Robot Description Format (URDF) file of the custom-designed underwater manipulator is imported into Simscape Multibody. The friction torque and the hydrodynamic disturbance are both added to the Simscape environment through the S-function.
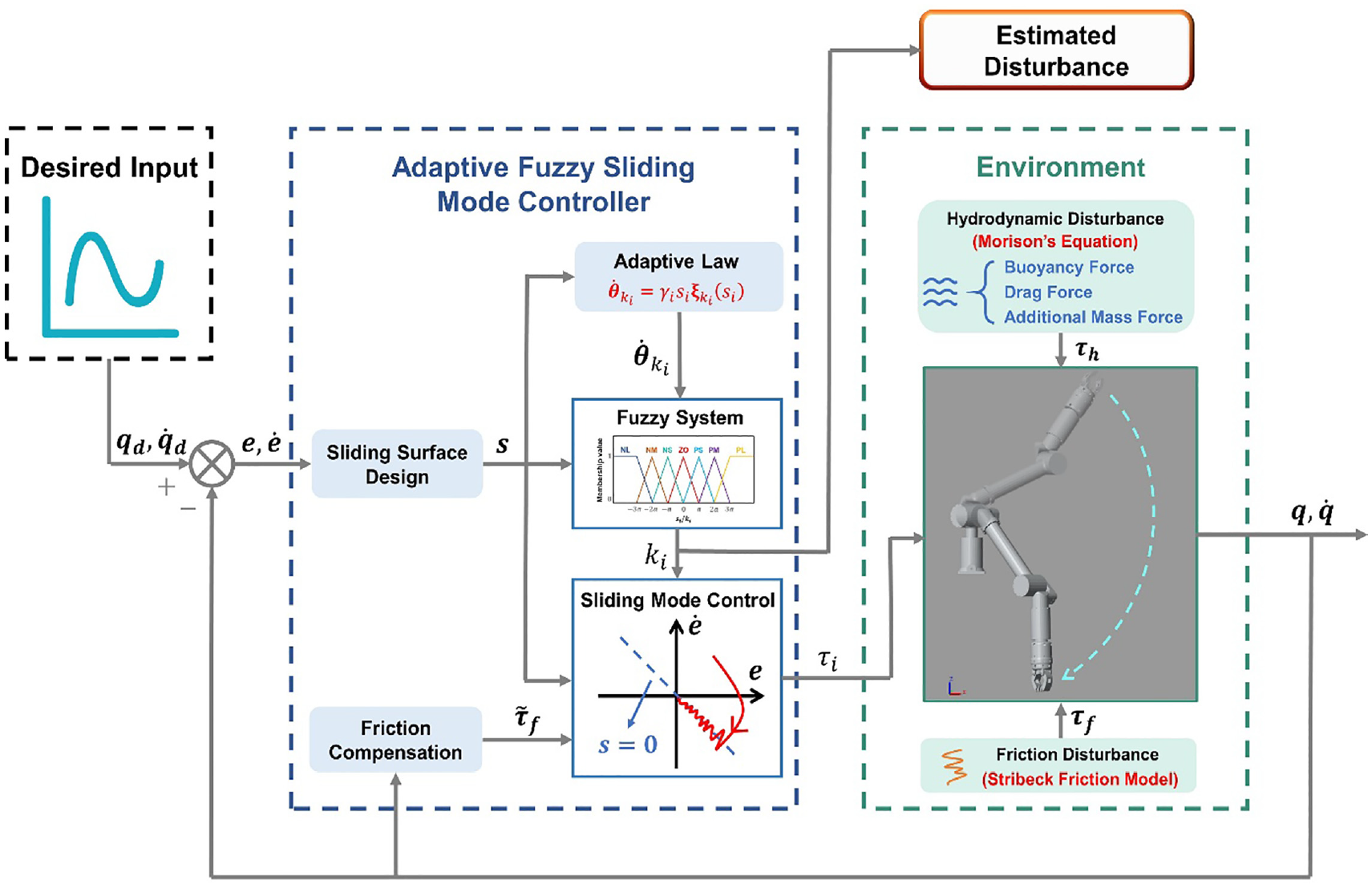
Block diagram of the underwater manipulator control system.
Experiments and results
Simulation of hydrodynamic influence
In this part, numerical experiments are conducted to study the hydrodynamic influence and validate the reasonableness of the model. All the simulations in this paper are conducted in the MATLAB/Simulink environment and the sampling time is chosen as 0.001 s. The simulation is performed in three cases, which are model on land, model underwater without the flow, and model underwater with the flow. In the environment of water flow,
In experiment 1, three models move in the same angular trajectory (
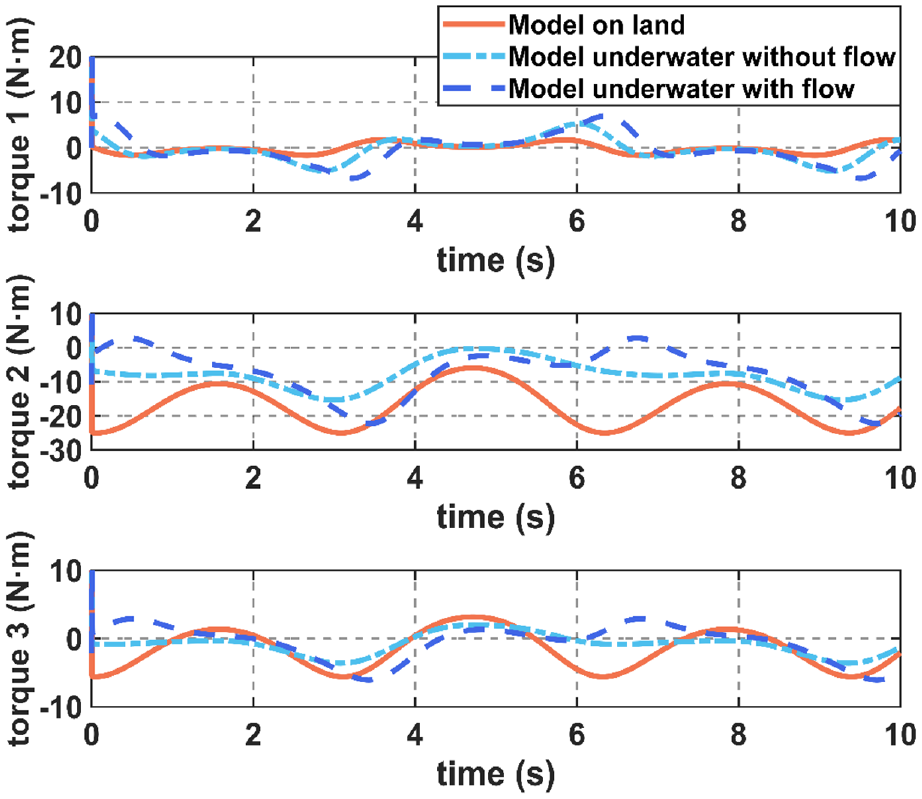
Experiment 1: joint torques for the same trajectory in three different environments.
In experiment 2, the manipulator moves without torque input in all cases. The three kinds of movement processes in the Simscape environment are shown in Figure 5. The manipulator on land in Figure 5(a) swings back and forth under the effect of gravity until it stops in about 3.72 s due to friction, while the underwater movement in Figure 5(b) and (c) stops earlier because of the extra hydrodynamic influence. Due to the buoyancy, joints 2 and 3 of the manipulator have different convergence angles underwater compared to on land. It can also be seen in Figure 5(c) that joint 2 stops at a smaller angle than the static water case because of the influence of water flow.
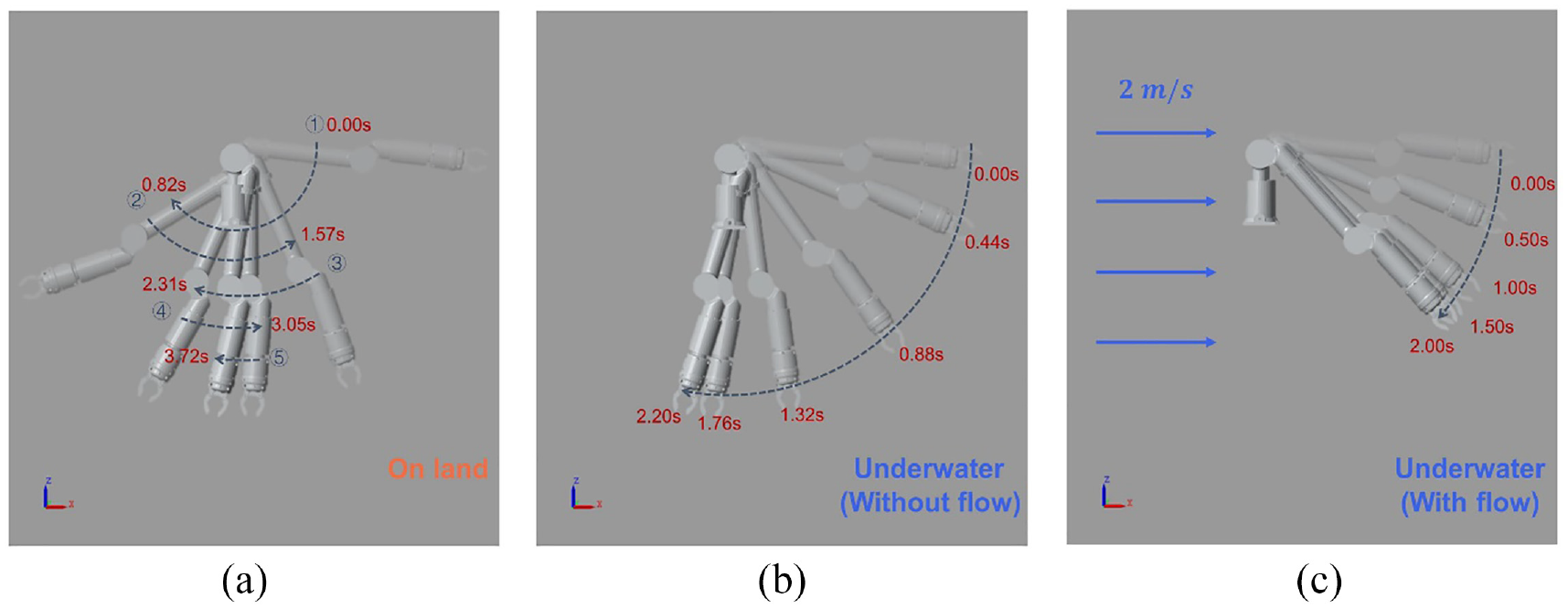
Experiment 2: manipulator movements without control torque: (a) on land, (b) underwater without flow, and (c) underwater with flow.
Based on the above experiments and results, it can be concluded that the proposed hydrodynamic model can simulate the underwater environment effectively.
Simulation of the proposed AFSMC strategy
To demonstrate the effectiveness of the proposed control strategy, comparative experiments in a special environment are conducted on AFSMC and CSMC. The manipulator is required to perform the task of movement with a variable load under the influence of water flow. The whole simulation environment is shown in Figure 6. As is shown in Figure 7, the task consists of two processes: reaching the position of a 1-kg object (the yellow part) within 0–5 s and grasping the object to move to the target position within 5–10 s.
Overall simulation environment in MATLAB/Simulink.
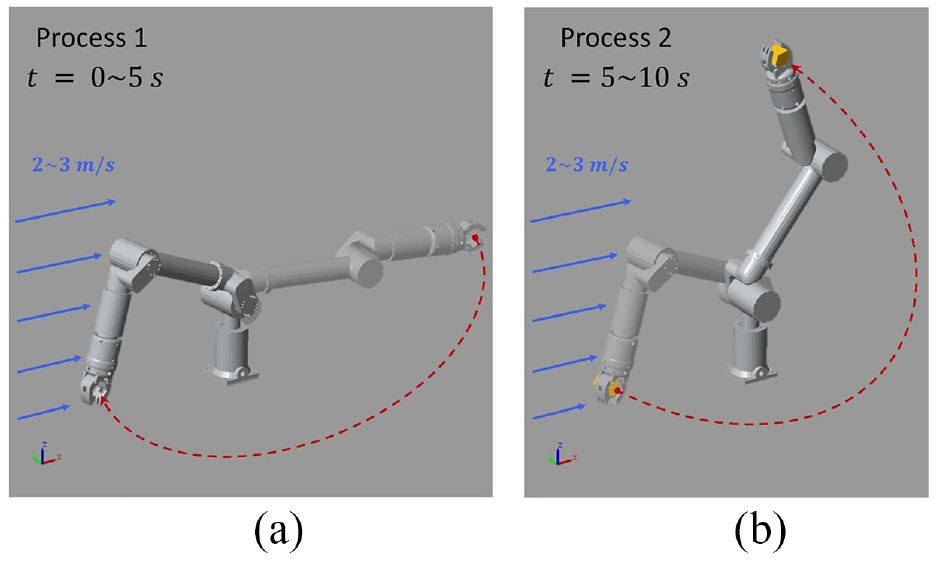
Illustration of the task: (a) process 1 without gripping any object and (b) process 2 with gripping a 1-kg object.
To more realistic simulation of the actual manipulator, quintic polynomials are used for trajectory planning to ensure the same initial angle as well as zero velocity and acceleration at the initial and end positions, which can avoid generating large torques. The desired trajectory of the gripper position is expressed as
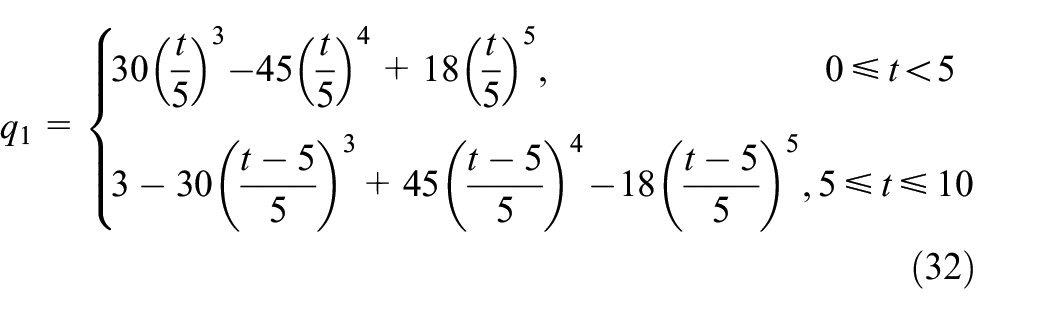


In water conveyance tunnels, the maximum velocity of water flow varies usually between 2 and 3 m/s (Nabipour et al., 2020). So

The parameters selected for controllers are shown in Table 4, and the estimation
Parameters of CSMC and AFSMC for simulations.

CSMC: control gains of classical sliding mode control; AFSMC: adaptive fuzzy sliding mode control.
Simulation results are given as follows. Figure 8 shows the three-dimensional (3D) trajectory tracking of CSMC and AFSMC in Cartesian space. It can be seen from the detailed diagram that AFSMC has better tracking performance than CSMC. Figure 9(a) and (c) shows the trajectory tracking performances of the joint angle and the gripper position. Both algorithms allow the trajectory tracking to converge, but the accuracy is different. The maximum angular error of CSMC and AFSMC is about 0.02 and 0.002, respectively. And the maximum gripper position error of CSMC and AFSMC is about 0.01 and 0.001, respectively. For the tracking of joint angular velocity in Figure 9(b), there is a long time and wide range of chatter in the curve of CSMC. In contrast, the curve of AFSMC is much smoother, with joint 2 producing only a small range of chatter during load changes. Based on the above, the proposed AFSMC strategy has higher steady-state accuracy and enables the manipulator to better track the trajectory in an environment with variable load and water flow.
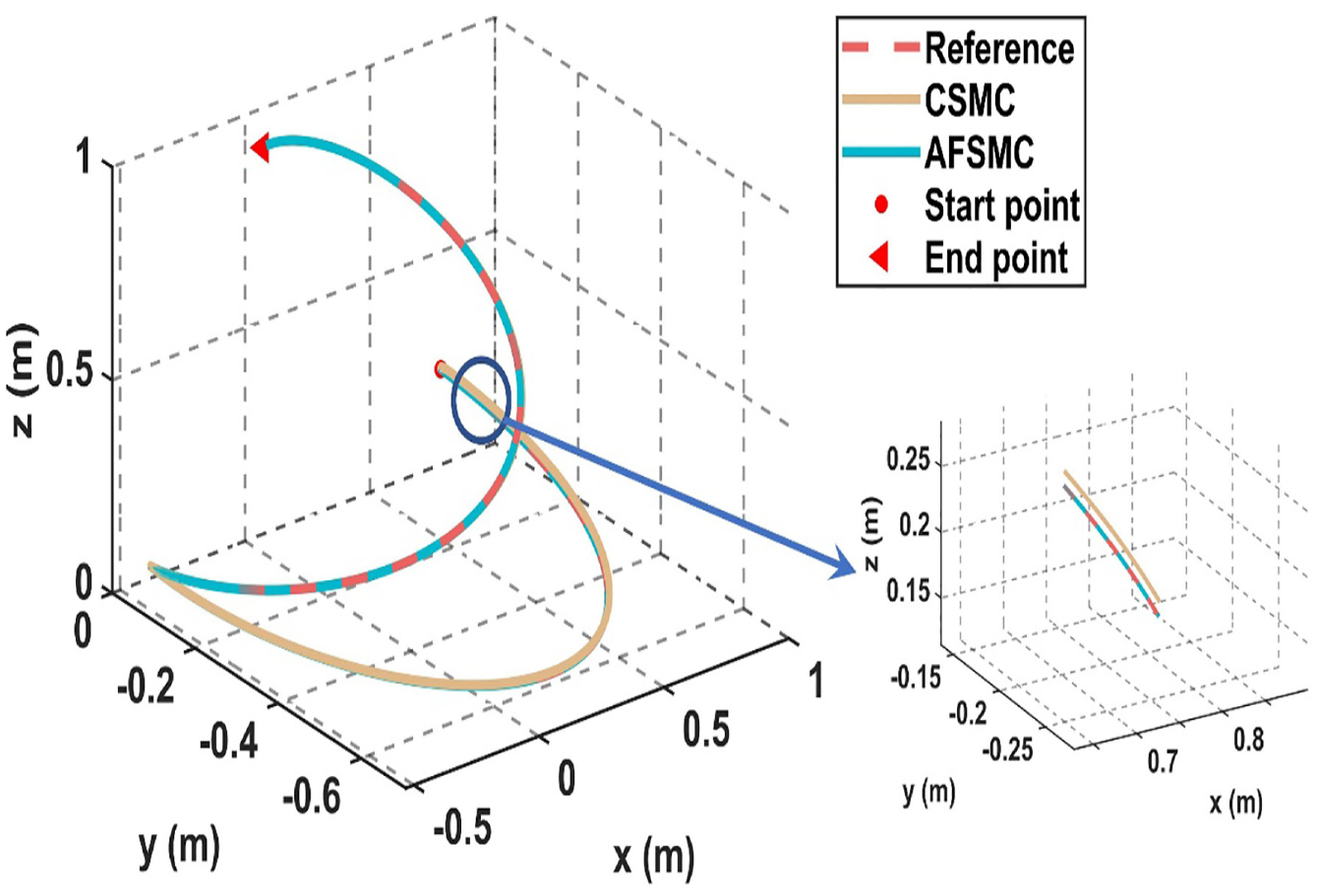
Three-dimensional trajectory tracking of CSMC and AFSMC in Cartesian space.
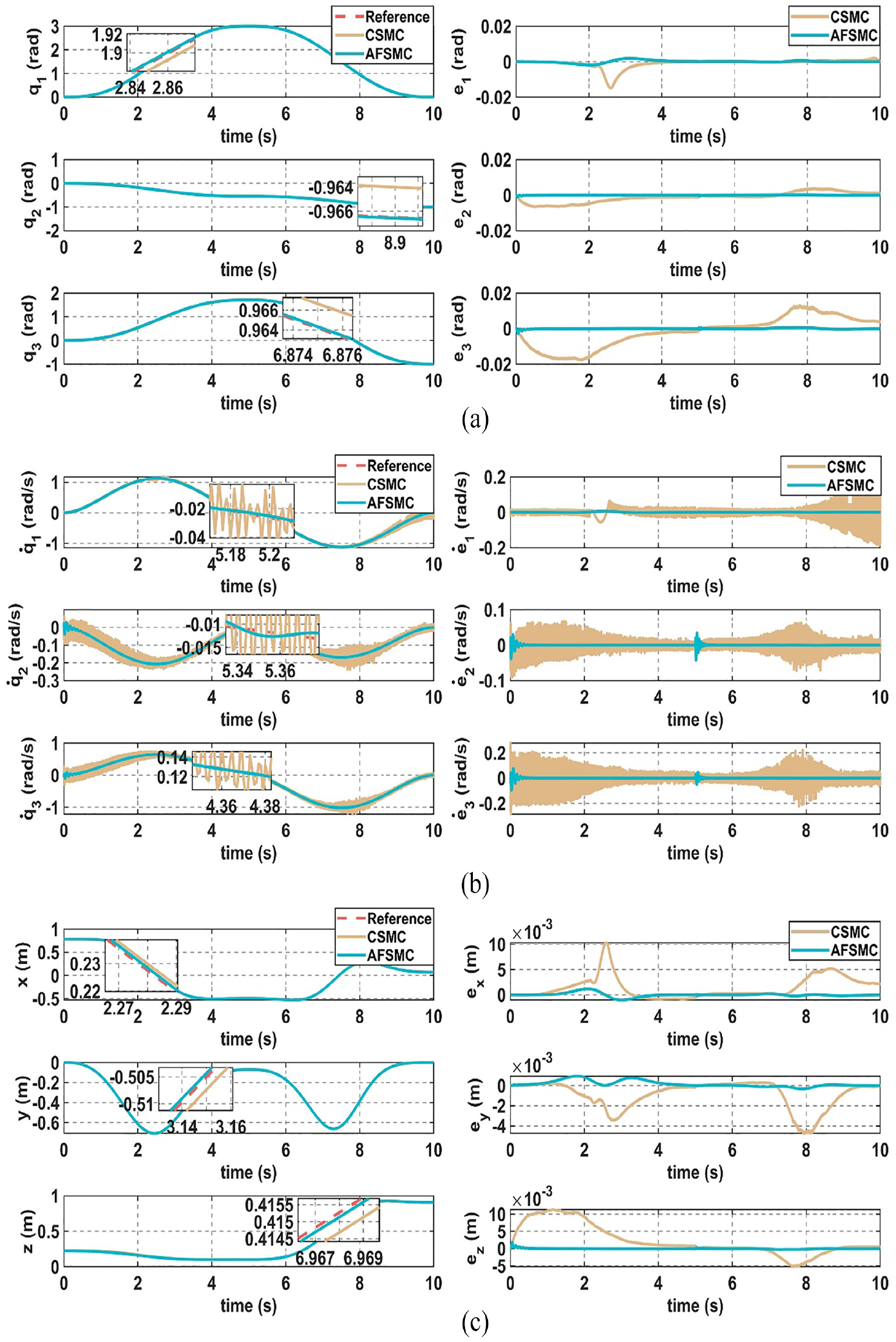
Comparison of tracking performances: (a) joint angle and its error, (b) joint angular velocity and its error, and (c) gripper position and its error.
It is worth mentioning the smooth trajectory of CSMC in Figure 8, despite the large chatter in its angular velocity in Figure 9(b). The reason for this is that the angle is the integral of the angular velocity, and the integrator acts as the equivalent of a low-pass filter. This means that the high-frequency part, namely the chattering part, will be filtered out during the process of integration (Tavares, 1966). So after filtering, the angle curve of CSMC is smooth, and the curve obtained in Cartesian space after the angle is calculated by forward kinematics will also be smooth.
From Figure 10, it can be obviously seen that the control torque of CSMC generates a very high-frequency chatter, where the vibration amplitude of joint 1 reaches about 100 N m. In engineering applications, chattering problems will seriously affect the stability and reliability of the manipulator. AFSMC can effectively solve the problem, which can be seen to have a smooth curve, with joints 2 and 3 producing only a small range of chatter during load changes. The chattering suppression is achieved by adaptive fuzzy systems that continuously adjust
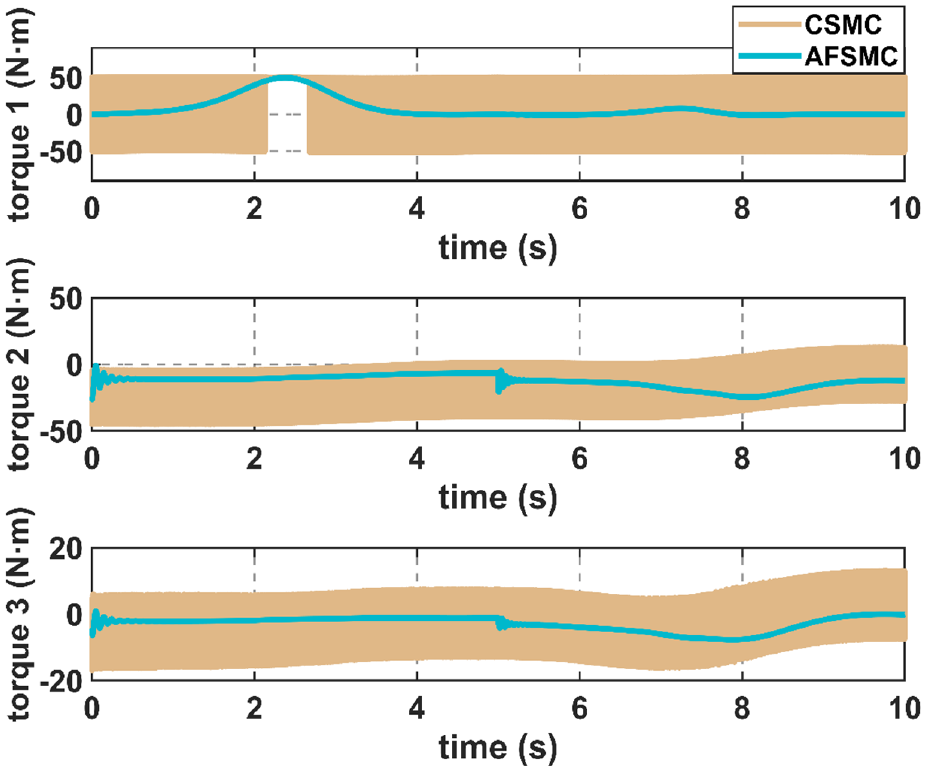
Joint torques of CSMC and AFSMC.
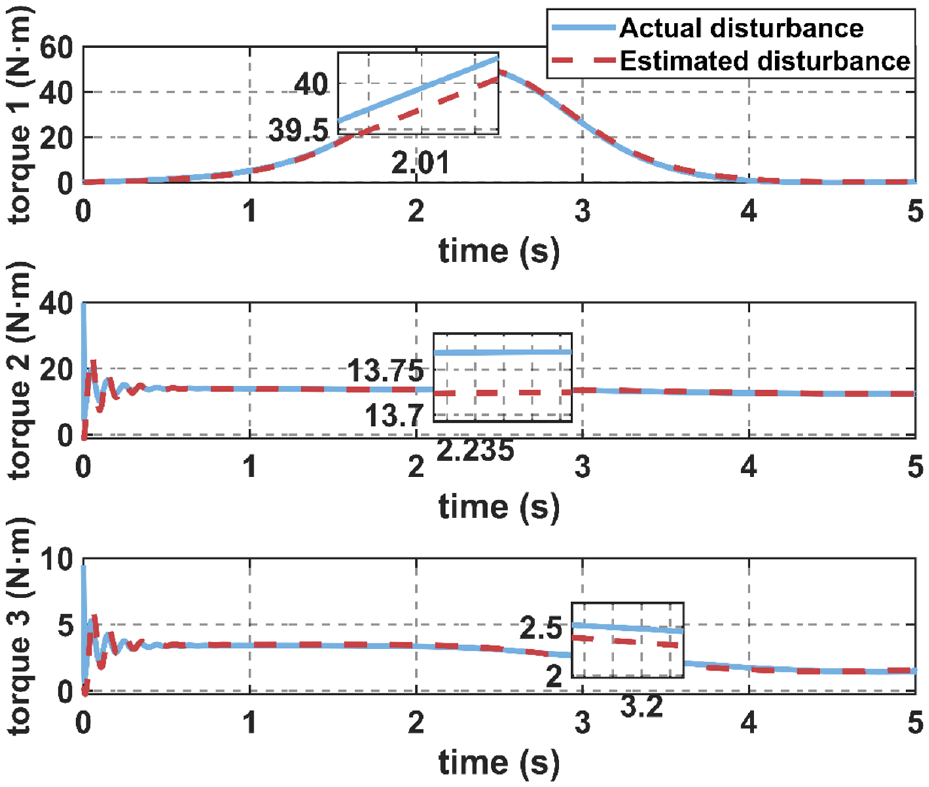
Estimation of hydrodynamic disturbance.
Conclusion
In this paper, a hydrodynamic model is established using the Simscape Multibody toolbox to simulate the movement of underwater manipulators, and a new adaptive fuzzy sliding mode controller is designed for precise and robust control. The joint friction torque is modeled by actual test data, and the hydrodynamic disturbance is modeled according to Morison’s equation to make the dynamic model more accurate. Numerical simulations are conducted in a special environment of water flow and variable load to verify the effectiveness of the proposed control strategy. The results demonstrate that the AFSMC strategy has better performance than CSMC for trajectory tracking. Furthermore, the chattering problem of joint angular velocity and control torque caused by CSMC is overcome by the proposed adaptive fuzzy system. And the AFSMC strategy has the ability to estimate the hydrodynamic disturbance according to the universal approximation theory which can be used as a reference for subsequent hydrodynamic analysis and measurements.
In future work, the tracked vehicle will be installed as the base of the underwater manipulator for the convenience of mobile repair work. Then the new dynamic model will be studied. And the experiments will be conducted on the real system to verify the reliability of the proposed control strategy.
Footnotes
Acknowledgements
The authors would like to thank editor and anonymous referees for their helpful and very delicate comments.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the projects of National Natural Science Foundation of China (No. 61973076, No. 52127813) and the National Key Research and Development Program of China (No. 2020YFC1511904).