This paper is concerned with the nonfragile predictive control problem for the networked control system (NCS) with input delay and network-induced time delays (NITDs). First, the transmission strategy governed by redundant channels is introduced to reduce the occurrence of data packet dropout between the sensor and the observer. Moreover, the event-triggered mechanism (ETM) is employed to save the network resources, where the maximum triggered interval is given. Subsequently, a nonfragile networked predictive control scheme (NPCS) is designed to address the input delay and the NITDs. Accordingly, the sufficient criterion ensuring mean-square exponential stability (MSES) is derived by employing the Lyapunov–Krasovskii stability theorem. Both the observer gain matrix (OGM) and the controller gain matrix (CGM) are gained through solving the nonlinear minimization problem with convex constraints. Finally, a simulation example is utilized to demonstrate the usefulness of the proposed main results.
In recent years, accompanying with the rapid developments of communication and control techniques, the traditional point-to-point control system has exposed some problems such as complex wiring and maintenance difficulties, which is hard to adapt to the requirements of the complex engineering structure. As discussed in (Pang et al., 2022a; Zhang et al., 2020b), the networked control system (NCS) has the advantages such as low cost, maintenance convenience, and high flexibility, which is gradually replacing the point-to-point control system. At present, the NCS plays a vitally important role in many different fields such as aerospace (Pongsakornsathien et al., 2019), transportation (Lv et al., 2021), and military defense (Hu et al., 2021). In contrast to the traditional control system, it is more difficult to handle the control problem for NCS due to network-induced phenomena (NIP) occurring in the networks, which would weaken the whole performance of the control system and even lead to instability (Pang et al.,2021a, 2021b, 2022a, 2022b; Suo and Li, 2022). During the past decades, the analysis problem has received increasing attention for the NCS with NIP and a large of innovative results have been reported (Li et al., 2019a; Rouamel et al., 2020; Xu et al., 2018; Zhao et al., 2021a). In addition, due to the limitation of network resources, the network environment is usually difficult to realize the desired control performance of multiple control systems to access the network. Consequently, the researchers have made great efforts to discuss the transmission strategies (Wang et al., 2019; Zhao et al., 2021b) and communication protocols (Liu et al., 2021a; Shen et al., 2020a, 2020b, 2021).
Up to now, many kinds of strategies have been proposed to deal with the NIP. The transmission strategy governed by redundant channels is a highly effective method to reduce the occurrence of data packet dropout and increase the reliability of the information (Li et al., 2021; Liu et al., 2021b; Shen et al., 2020b; Zhang et al., 2017). Under this transmission scheme, the output feedback control problem has been investigated in (Shen et al., 2020a) for the networked nonlinear semi-Markov jump system, where the proposed method can reduce the adverse effects caused by data packet loss. On the contrary, the networked predictive control method (NPCM) has been utilized to compensate the network-induced time delays (NITDs) (see Liu, 2022a, 2022b; Pang et al., 2021a; Pang et al., 2022b; Zhang et al., 2020a). With the help of the NPCM, the closed-loop NCS has been modeled as a switch system in (Sun and Chen, 2014), where sufficient conditions ensuring stability have been derived and the adverse effects caused by NITDs have been overcome. Subsequently, a networked predictive control scheme (NPCS) has been presented in (Liu, 2016), where the necessary and sufficient condition has been established to guarantee both stability and consensus for the closed-loop multiagent system. Besides, the change in the system operating environment will lead to input time delay, which is also a problem to be addressed. Nevertheless, most aforementioned results concerning NPCM for NCS are only applicable to the case of unlimited network resources. It has not been paid enough attention to the study of NPCM under the limited communication ability.
Due to the implementation error or unknown noise (Tan et al., 2021), the controller gain may change resulting in lower control performance. To treat this issue, the nonfragile controller has been proposed to achieve the desired control effect. For instance, an observer-based nonfragile controller has been designed to stabilize the nonlinear system with external disturbances and actuator saturation in (Sakthivel et al., 2019), where additional parameter perturbations in the controller are characterized by norm-bounded uncertainties. Considering the occurrence of uncertainties in the controller, the observer-based nonfragile controller has been proposed in (Arumugam et al., 2020) to achieve the desired performance requirements. The nonfragile sampled-data controller has been designed in (Muthukumar et al., 2019), and the stabilization problem has been solved for uncertain NCS with additive time-varying delay. So far, the nonfragile controller has played a meaningful role in the NCS, so it is significant to study such controller design problem.
It is well recognized that the signals are transmitted under the time-driven mechanism in most cases, where this communication method does not take the limited communication resource into account. However, the communication bandwidth is a scarce resource which needs to be properly utilized (Yang et al., 2020). At present, the event-triggered mechanism (ETM) is popular as an effective communication strategy (Deng et al., 2021a; Gao et al., 2020; Han and Lian, 2021; Liang et al., 2021; Qu, et al., 2022; Sun et al., 2022; Tan et al., 2023). The results show that the network resources can be effectively saved and the network environment can be optimized by combining the ETM with the NPCM. For instance, by aid of the Lyapunov stability theorem, the predictive control problem has been solved in (Zou et al., 2017) for NCS based on the ETM, where the event-triggered generator (ETG) has been added to reduce unnecessary signal transmission between the sensor and the observer. Recently, the NPCS has been designed in (Deng et al., 2021b) based on ETM, which can not only effectively reduce the pressure of network bandwidth, but also deal with the negative impact due to the denial-of-service attack. Compared with the ETM mentioned above, the maximum trigger interval is constructed in (Yang et al., 2018). This is an effective way to avoid inaccurate prediction results caused by too-long trigger intervals. To sum up, it is significant to study the design problem of NPCS under the ETM. In addition, there are a few of researches on handling the design problem of nonfragile NPCM with better robustness, which constitutes another research motivation.
Inspired by the aforementioned discussions, we aim to design the event-triggered nonfragile NPCS under the redundant channels such that the mean-square exponential stability (MSES) can be guaranteed for the conducted NCS. The major contributions are summarized as follows. (1) A nonfragile NPCS is proposed to compensate input delay and NITDs, the redundant channel transmission strategy is used to deal with data packet dropout, and the ETM is used to reduce resource consumption. (2) By taking an important property of the ETM proposed in this paper, the closed-loop system is transformed into a switched system with time delay. In virtue of the Lyapunov–Krasovskii stability theorem, the desired control performance analysis is conducted, and new sufficient condition ensuring MSES is acquired for the closed-loop system in form of matrix inequalities. (3) The observer gain matrix (OGM) and controller gain matrix (CGM) are acquired by solving nonlinear minimization problem with convex constraints. The rest of this paper is described as follows. In “Problem formulation and preliminaries” section, the control system model and transmission strategy governed by redundant channels are introduced, respectively. Moreover, the event-triggered NPCS is designed. The main theorem is presented in “Main results” section to address the problem of MSES for NCS with input delay and NITDs. A simulation example is shown in “An illustrative example” section to illustrate the main results. The conclusion of this paper is given in “Conclusions” section.
Notations: The notations used are awfully standard in this paper. The set of all matrices and the n-dimensional Euclidean space are represented by and , respectively. The inverse and transpose of matrix Q are denoted by and , respectively. If Q is a positive-definite symmetric matrix, then we write as . Let and I be the zero matrix and the identity matrix with appropriate dimensions, respectively. In a symmetric matrix, “*” is employed to describe the symmetric term. If x is a random variable, stands for the mathematical expectation of x. The maximum and minimum eigenvalues of the matrix Q are denoted by and . Besides, ⊗ represents the Kronecker product of matrix.
Problem formulation and preliminaries
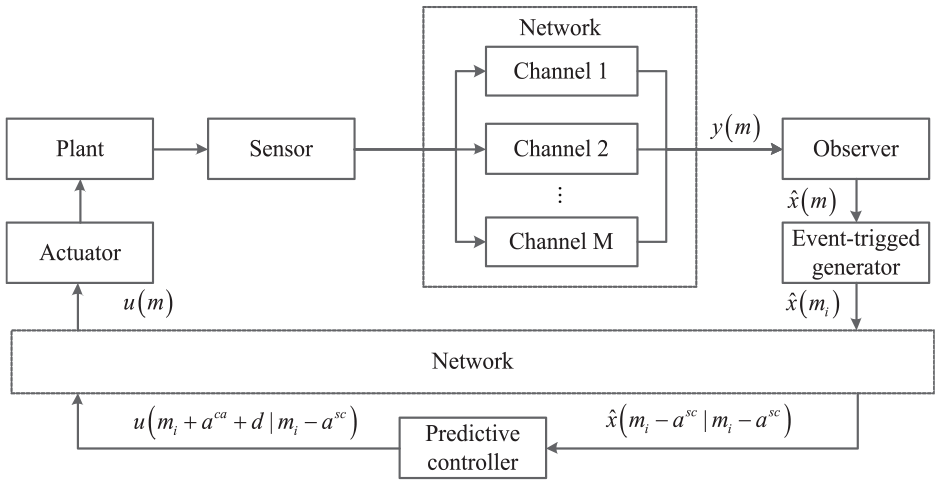
The block diagram is shown in Figure 1 for the NCS under the redundant channel transmission scheme and the ETM discussed in this paper. In Figure 1, the signals in the sensor will be transmitted to the observer through the network, and it is assumed that only the data packet dropout phenomenon may occur. When the released signals by the ETG are transmitted to the predictive controller through the network, the NITD occurred is . When the signals from the predictive controller are transmitted to the actuator through the network, the NITD occurred is .
Diagram of the NCS under the redundant channel transmission scheme and the ETM.
The plant in Figure 1 is described by a linear system with input delay
where and denote the state vector and control input, respectively. and are known real matrices. represents the input delay. In fact, the system will not receive the control signal for , that is, the control input is for .
To reduce the negative impact of data packet dropout between the sensor and the observer, the redundant channel transmission scheme is introduced to obtain more effective signals for the observer. To be more specific, under the M redundant channels, the measurement output received by the observer is described in the following form
where denotes measurement output and . is known real matrix for . The random variables are used to describe the data packet dropout phenomenon in the k th channel and satisfy the Bernoulli distribution with
where are known constant. Assume that and are mutually independent for .
Remark 1. On the basis of equation (2), we know that the transmission channel will be determined based on the value of . If , it indicates that the channel 1 is capable of transmitting signals at time m, so the signals will be transmitted through the channel 1. If , it means that signals can not be via the channel 1 at time m, then we will consider whether the signals can be transmitted via the channel 2. Therefore, the signals will be transmitted through the channel k () if and only if the channel () cannot transmit signals and the channel k can transmit signals. Obviously, this transmission strategy can reduce the occurrence of data packet dropout.
Remark 2. Compared with the single-channel transmission strategy, the redundant channel transmission strategy can effectively reduce the probability of packet loss and increase the availability of data. Note that this scheme may increase the communication burden and the computational complexity.
By employing the information of measurement output, the following state observer is designed
where denotes the one-step prediction for time , and L is the OGM to be designed and .
To effectively reduce the communication burden and save network resources, an observer-based ETG is employed to reduce the transmissions of signals in the feedback channel from the sensor to the controller. The triggered instants can be generated by
where , is the event generator function, is a symmetric matrix, is a constant, and H stands for the maximum triggered interval, , . According to equation (5), for , we know that the released signal can be described by
Remark 3. For a given in equation (5), the adjustable parameters H and determine the number of times triggered. The ETM becomes the time-triggered mechanism when or . Meanwhile, the network burden may aggravate, which is not applicable to a weak network environment and degrades the system performance. If H and are too large, a few of data packets are sent through the network and signals in the controller are not updated in time, which might degrade the system performance. Therefore, we need to set the appropriate H and in the ETG to balance the system performance and the network resource consumption.
Remark 4. There have been many reports showing that event-triggered control for continuous time is more widely used than discrete time (Tan et al., 2022, 2023). It is worth mentioning that the study of the event triggering for discrete systems is still meaningful. With the expansion of the research field of system theory and the wide application of computer technology, the theory of discrete system has been developed into a branch of control theory parallel to the continuous system, which has become an important part of control theory. But the study of the discrete system is still not perfect, especially in the aspect of networked predictive control. Besides, the control of a continuous system is also achieved by discretizing the control of the system in practice. Therefore, the ETM is introduced into the study of networked predictive control for discrete system, which not only enriches the NPCM for the such system but also promotes its practical application.
Remark 5. The Zeno behavior is not expected to exist in the triggered-control scheme. As the research object of this paper is discrete system, the lower bound of inter-execution times by the proposed ETM is larger than 1. This means that Zeno behavior can be avoided.
If there is no ETG in the feedback channel or all signals in the observer can reach the controller through the ETG, then the data received by the controller from the observer are
More generally, due to the existence of an event-triggered generator in the feedback channel, the following two cases need to be considered.
Case 1: The data from the observer are received in the predictive controller at the time m. The latest data received by the predictive controller are expressed by
Case 2: No data reach the controller through the ETG at the time m. The data stored in the predictive controller at the previous moment will be used, that is
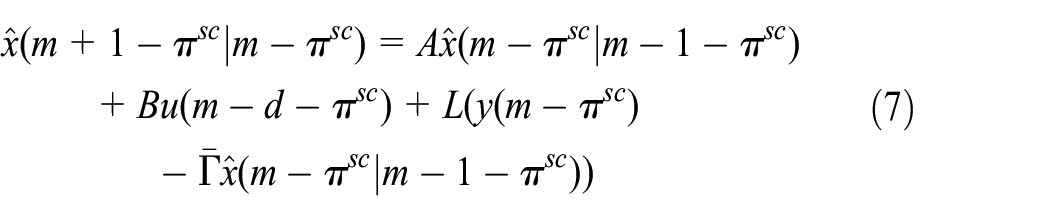
When is determined by equation (8), the state can be predicted by
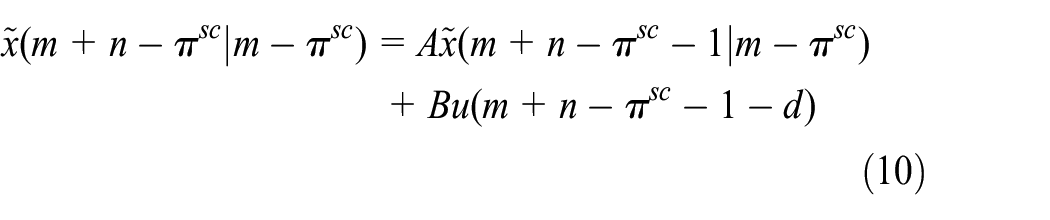
for , where . Furthermore, when is determined by equation (9), the state can be predicted by
To compensate the NITDs and input delay, the following nonfragile controller is designed based on the signals governed by the ETG
where () is the latest triggered moment, , K is the CGM to be designed, satisfies the structure: , D and E are constant matrices, is unknown time-varying matrix satisfying .
Remark 6. It is noted that the controller gain contains the perturbation term . The purpose of introducing is mainly to increase the insensitivity of the controller in practical application and cope with the possible influences from data inaccuracy, measurement error, and noise on the control performance.
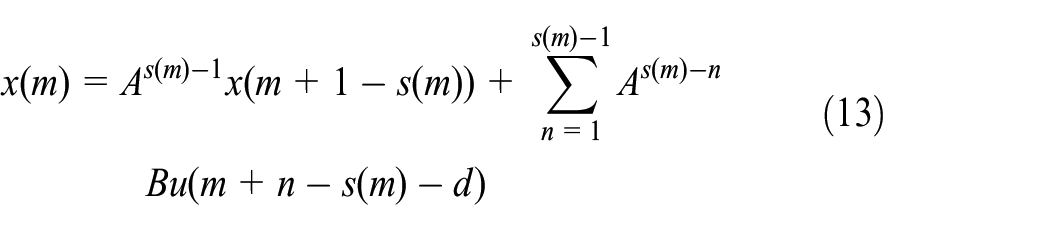
For the sake of illustration, set . According to equation (1), it is clear that
Letting , , , the following augmented system with delay can be obtained according to equations (17) and (18) as
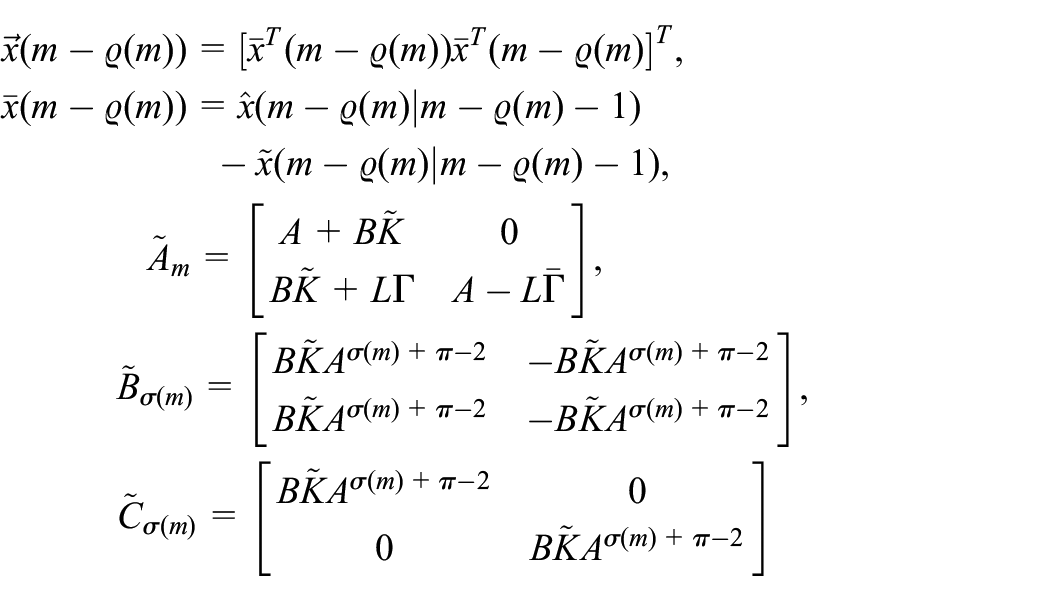
where
Now, it can be seen that the augmented system (equation (19)) is a switched system with time delay. is the switching signal and denotes time-varying delay. Let , . For the sake of simplicity, set
Before proceeding, we introduce some definitions and lemmas that will be very useful for subsequent analysis of MSES.
then, equation (19) is said to be mean-square exponential stable, where decay coefficient is a constant and represents the decay rate.
Lemma 1. For known matrices , , and unknown matrix (), the inequality holds, if and only if there exists scalar , such that (Feng and Hao, 2020).
The objective of this paper is to deal with the issue of predictive control for NCS (equation (1)) with input delay and NITDs under the redundant channel transmission scheme (equation (2)) and the ETM (equation (5)). More precisely, the following two issues need to be handled.
Propose sufficient condition ensuring the MSES for the augmented system (equation (19)).
Design gain matrices L and K such that the input delay and NITDs can be compensated by the NPCS proposed based on the ETM.
Main results
In this part, based on the Lyapunov–Krasovskii stability theorem and the matrix analysis technique, sufficient condition is attained to ensure the MSES of the augmented system (equation (19)). Moreover, the OGM and CGM are obtained by solving the nonlinear minimization problem with convex constraints.
Analysis of MSES
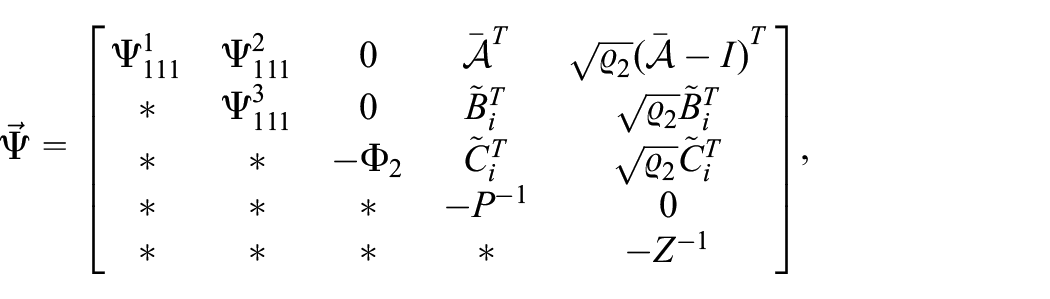
Theorem 1. For known scalar , the augmented system (equation (19)) is mean-square exponential stable, if there exist matrices , , , , , and , real matrices () and scalar such that
where
Proof. Letting , one has
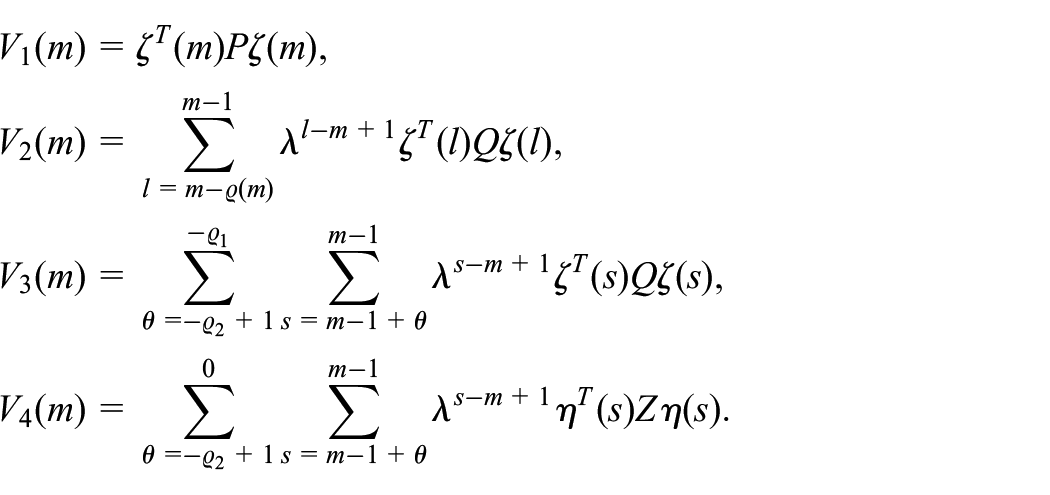
Choose the Lyapunov functional
where
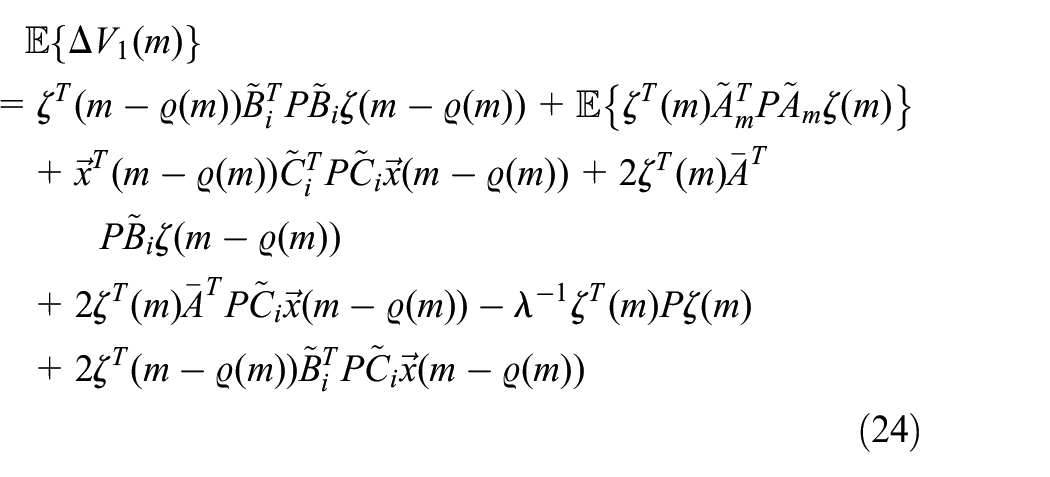
Letting and along with the solution of equation (19), we have
For brevity, we set
Subsequently, it is not hard to get
Then, by virtue of the properties of Kronecker product, we deal with the term as follows
With the help of Schur complement lemma, we know that means
According to Lemma 1, it is not hard to get that equation (35) is equivalent to the following inequality
Furthermore, the above inequality can be rewritten as , where
By applying the Schur complement lemma again, one has from . Evidently, it is clear from and that . After some straightforward algebraic manipulations, one further has
where and . It follows immediately from equation (37) that
Therefore, we know that the augmented system (equation (19)) is mean-square exponential stable according to Definition 1. The proof of this theorem is now complete.
Design of observer and controller gains
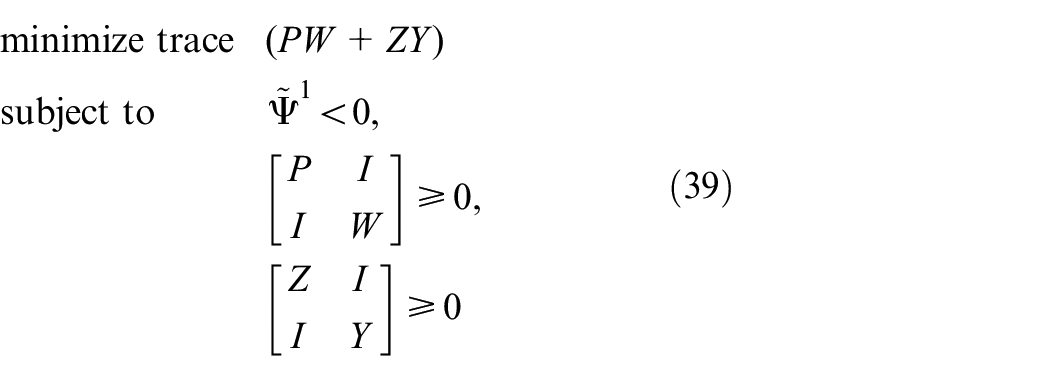
It should be noted that it is pretty difficult to get the OGM and CGM from the matrix inequalities (equations (20) and (21)) because the formula (20) is not a linear matrix inequality due to the existence of P, , Z, and . Then, we will handle this problem by employing the cone complementary linearization algorithm in (Liu et al., 2017).
For convenience, we set and . It is not difficult to get that , . By replacing the term in equation (20) by , it converts to , where and . The OGM and CGM can be obtained by solving the following nonlinear minimization problem
Remark 7. So far, we have developed a new nonfragile NPCS under the transmission of the redundant channel and event-triggered communication criteria. The condition in Theorem 1 guarantees the MSES of the addressed NCS. Besides, we can obtain the OGM and CGM by solving equation (39). In Theorem 1, we can observe the effect of redundant channel transmission strategy and ETM on system stability. To be specific, reflects the influence of redundant channel transmission strategy on system stability and the stability criterion involves parameters and in the ETM.
Remark 8. In this paper, we mainly answered the following two questions: (1) how to propose an effective NPCS to deal with the delay influence caused by the network? (2) how to ensure stability with theoretical analysis by proposing a new control method? Compared with the existing NPCS in (Sun and Chen, 2014; Liu, 2016; Yang et al., 2018; Pang et al., 2021b), the major effort has been devoted to designing the nonfragile NPCS based on ETM in the case of communication limitation. The differences compared with existing literature are as follows. (1) The effects of gain perturbation, communication limitation, and NIP are considered comprehensively when analyzing the system performance. (2) The closed-loop system is modeled as a switching system and its MSES problem is analyzed. (3) New effective nonfragile NPCS is proposed to compensate the effects of the input time delay and NITDs.
An illustrative example
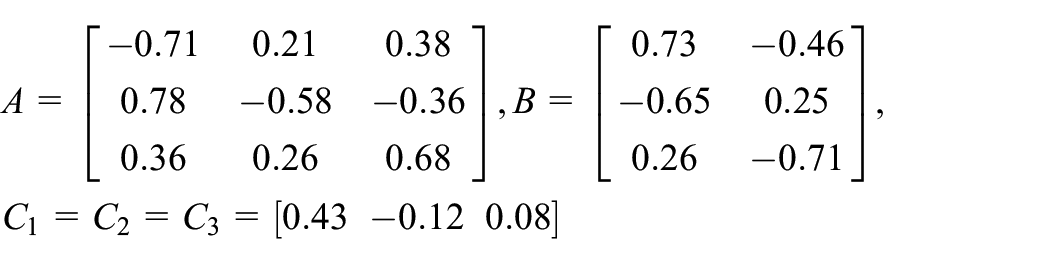
In this section, a simulation example is used to illustrate the effectiveness of the designed nonfragile NPCS based on the ETM. To be more specific, for the NCS described by equations (1) and (2), let and select the following parameter matrices:
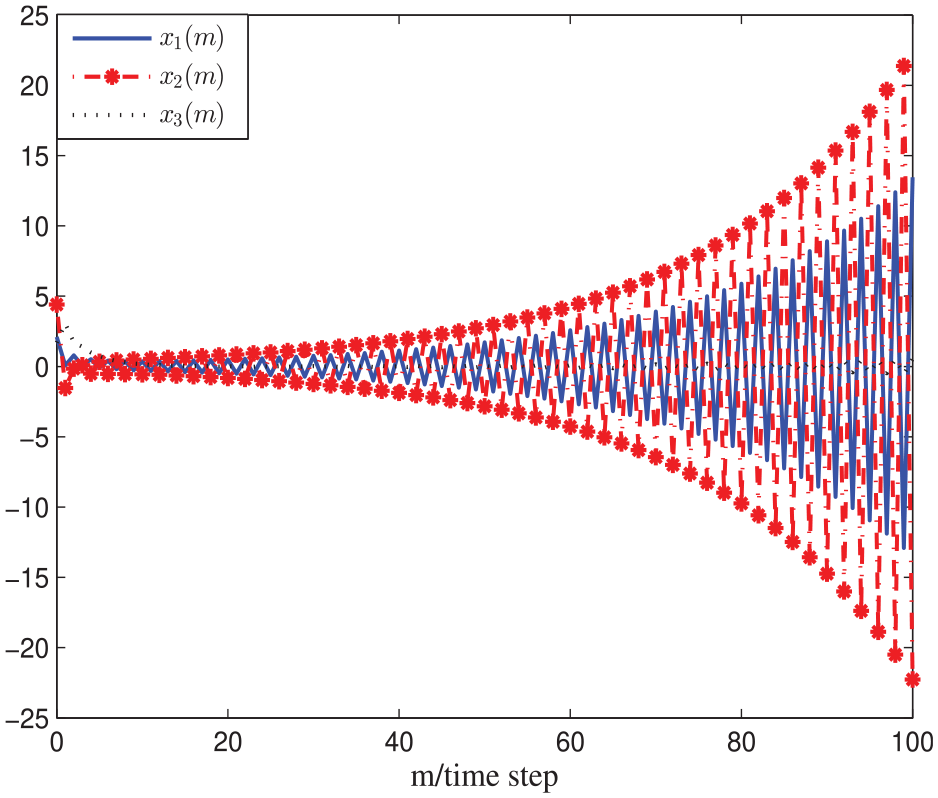
Assume input delay , the bounds of NITDs , then we have . The parameters are selected as , , in the ETM. The initial values of NCS are set to , , and . The expectations of , , and are , , and , respectively. The other parameters are selected as , , , . The state trajectories of the open-loop system are depicted in Figure 2, where () is the r th element of state . Obviously, the open-loop system is unstable.
State trajectories of open-loop system.
For comparison with existing control methods, three cases are discussed in this example.
Case 1: For this case, the effects from both input delay and NITDs are tackled simultaneously, the nonfragile NPCS is employed. The controller is given by equation (12), that is
By solving the nonlinear minimization problem (equation (39)) with convex constraints, the OGM and CGM are obtained as follows
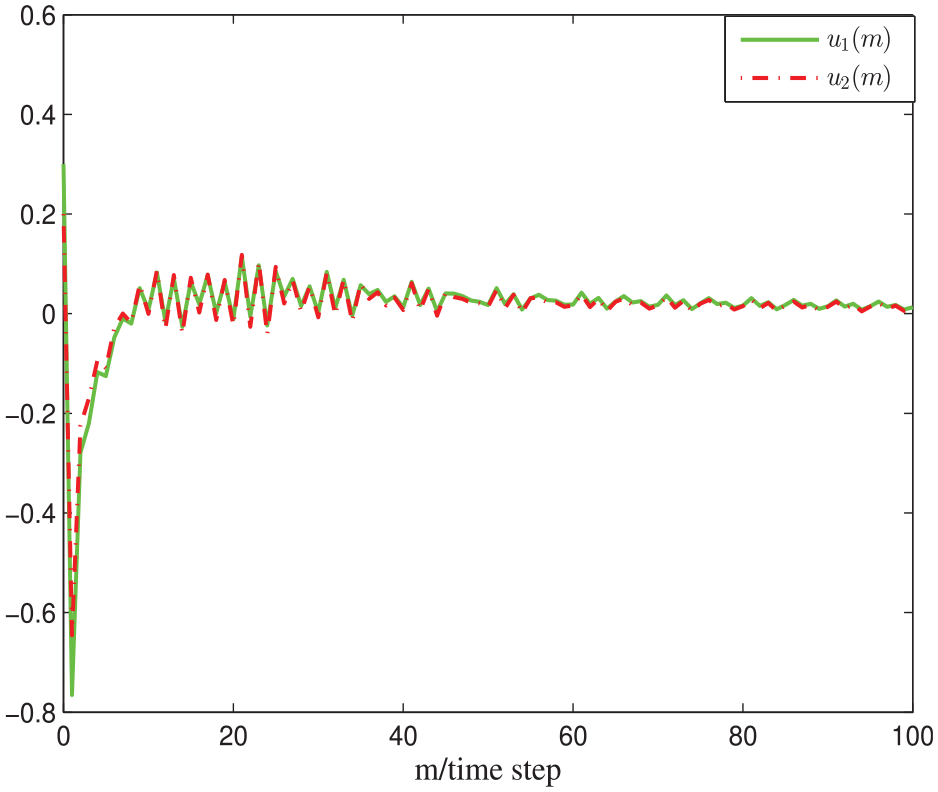
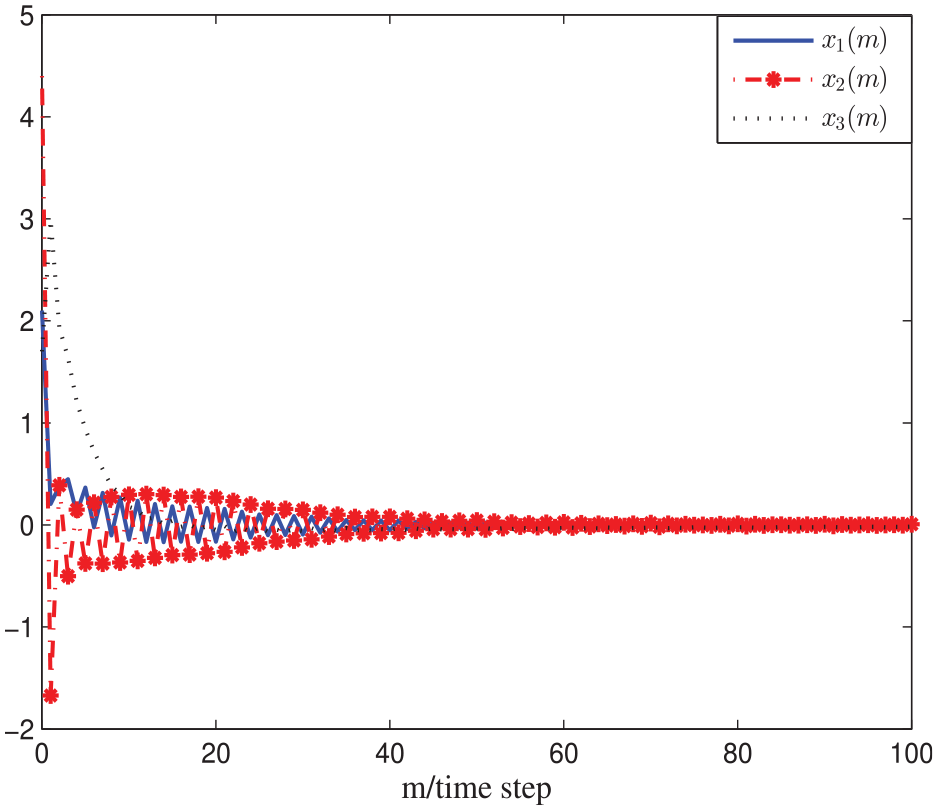
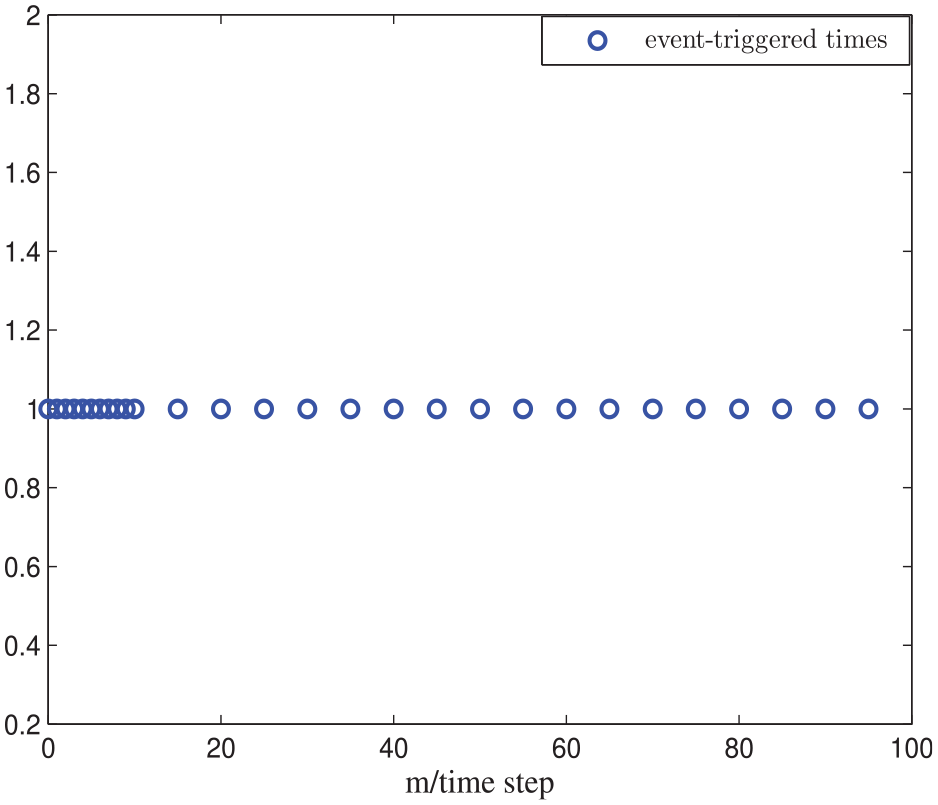
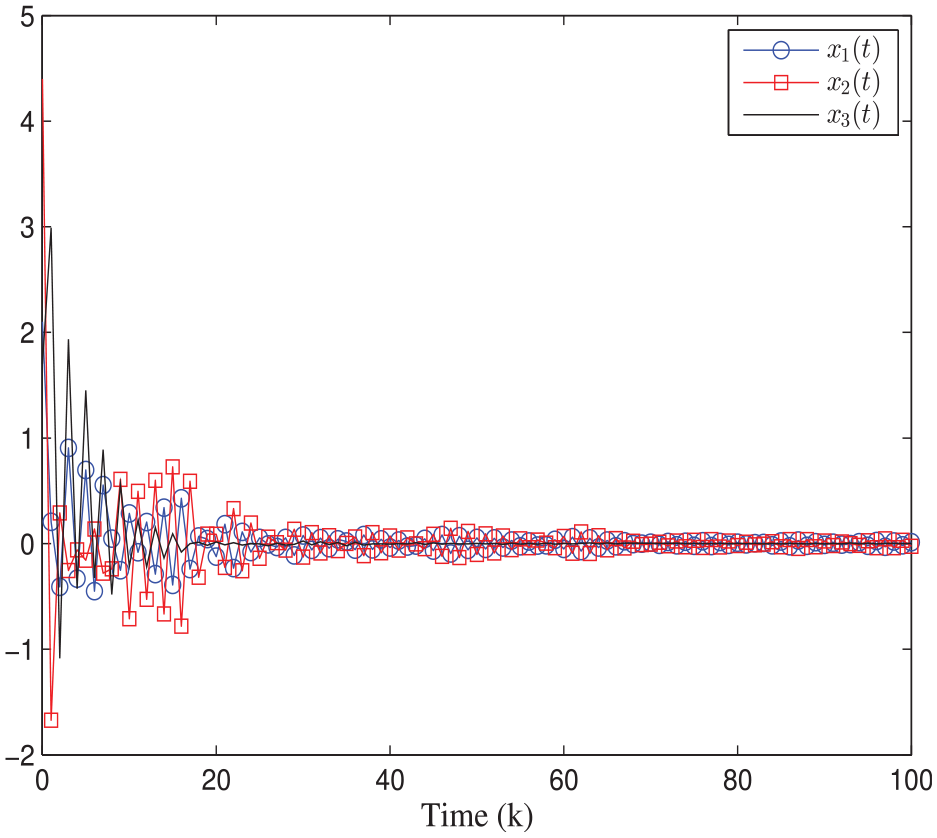
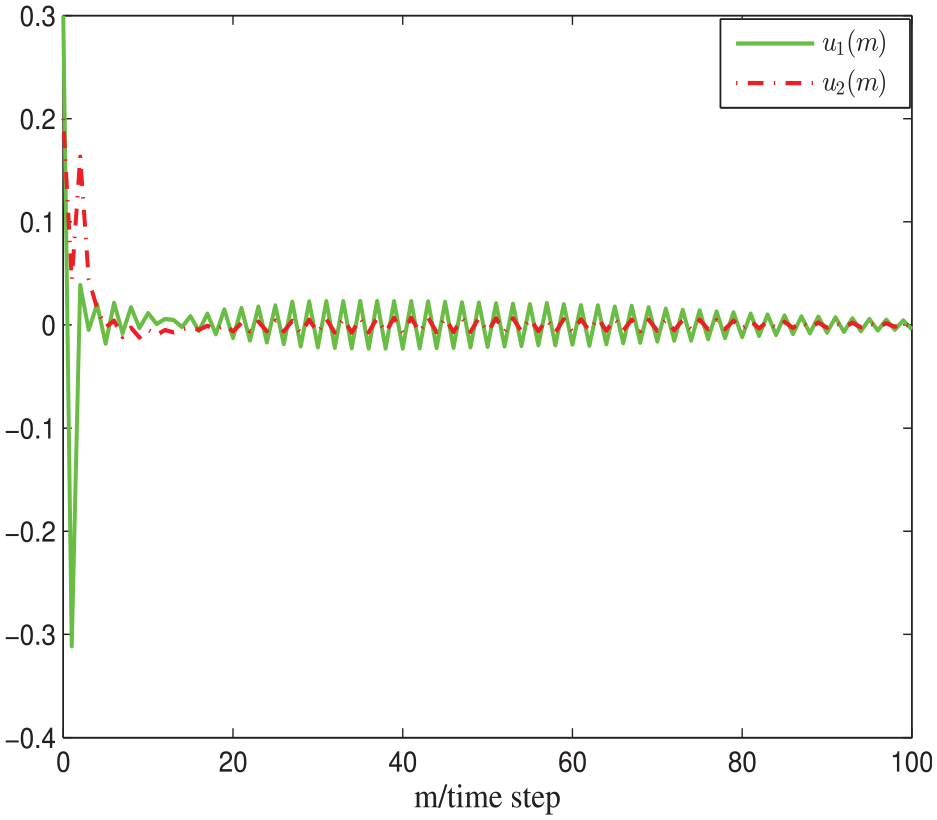
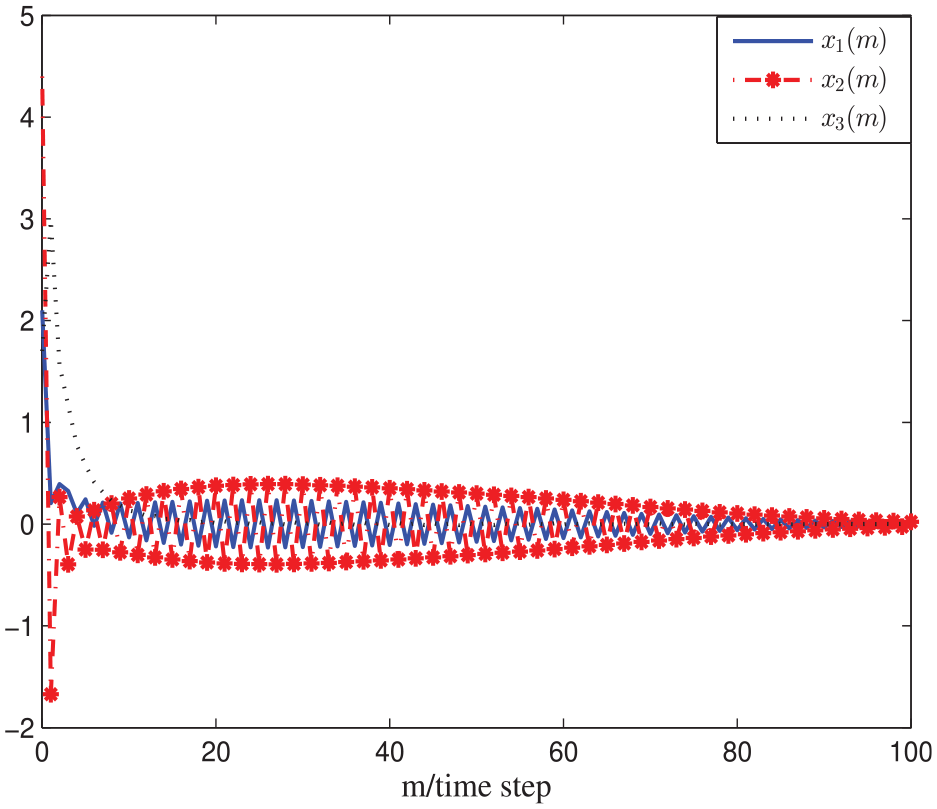
Figure 3 describes the trajectories of the control input under the designed nonfragile NPCS, the corresponding state trajectories of the closed-loop system are displayed in Figure 4, where () and () are the r th element of state and control input , respectively. Figure 5 shows the event-triggered times. At this time, the state trajectories are convergent.
Trajectories of control input in Case 1.
State trajectories of the closed-loop system in Case 1.
Event-triggered times.
Case 2: Only the input delay is compensated. The following control method proposed in (Tan et al., 2019) is adopted
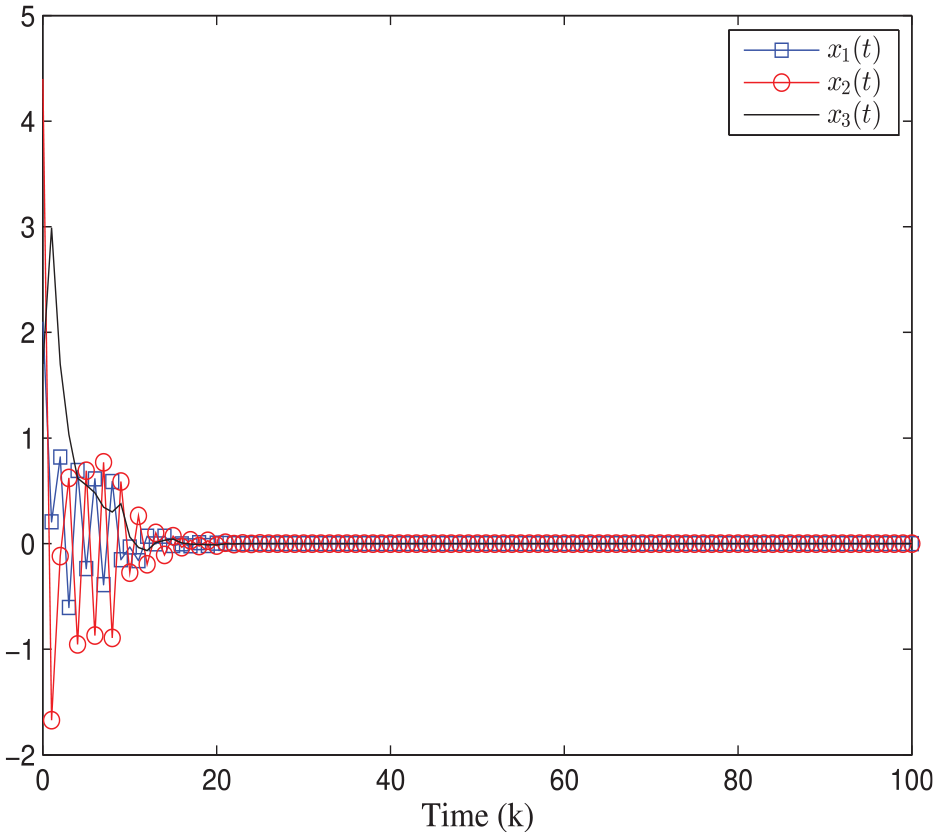
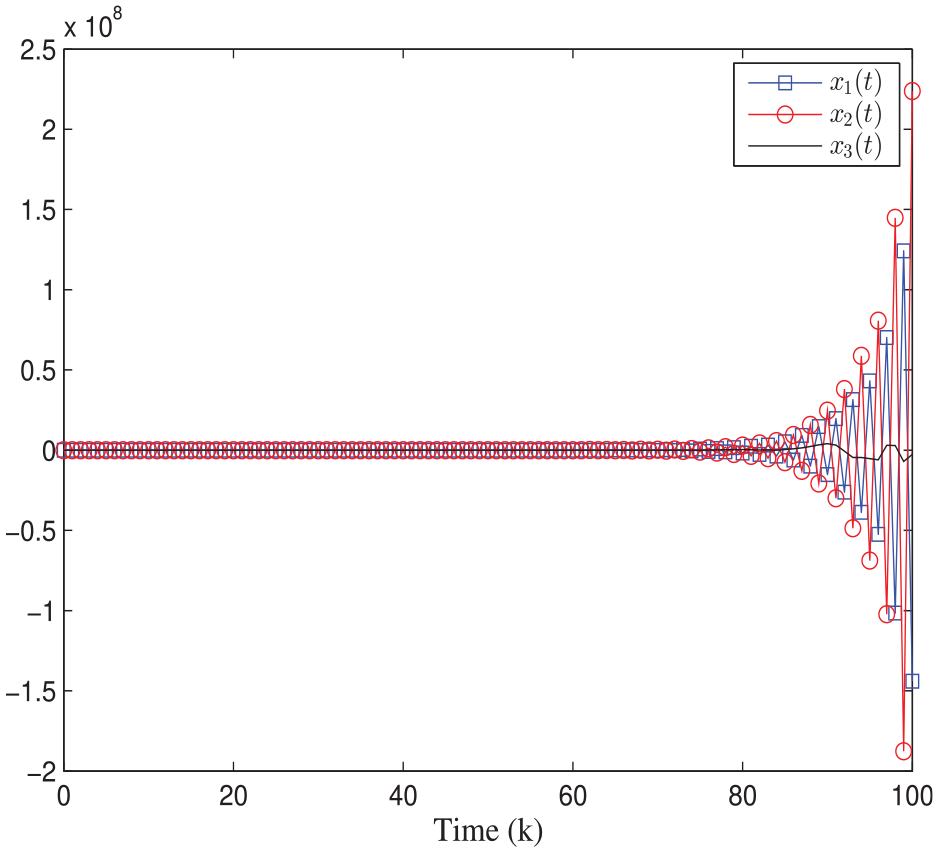
It can be seen from Figure 6 that the state trajectories of the closed-loop system are convergent when there are no NITDs. If there are NITDs, the control effect is shown in Figure 7. Clearly, the desired stability has not been achieved.
State trajectories of the closed-loop system without NITDs in Case 2.
State trajectories of the closed-loop system without compensating NITDs in Case 2.
Case 3: The input delay and NITDs are compensated. In this case, the following NPCS mentioned in (Li et al., 2019b) is used
The OGM and CGM are obtained by the eigenstructure assignment method as follows
Similar to Case 1, the trajectories of the closed-loop system shown in Figure 8 are convergent.
State trajectories of the closed-loop system in Case 3.
The results under the different cases show that the NPCM can effectively compensate the input delay and NITDs. The ETM can effectively reduce the frequency of signal transmission in the network while ensuring the control performance of the system.
The statistical properties of random variables , , and are changed for the comparison purpose. To increase the occurrence of data packet dropout, let , , and , all other parameters are the same as mentioned above. Figures 9 and 10 depict the control input trajectories and state trajectories in this case, respectively. The convergence speed of the state trajectories becomes slow, which also means that the occurrence of data packet dropout will affect the performance of the system.
Trajectories of control input with compensating under , , and .
State trajectories of the closed-loop system with compensating under , , and .
Conclusions
The problem of predictive control has been investigated for the NCS with input delay and NITDs in this paper. The transmission scheme regulated by redundant channels has been adopted, which has enhanced the reliability of signal transmission. The nonfragile NPCS based on the ETM has been proposed to compensate input delay and NITDs and reduce the frequency of signal transmission. By using augmented technology, the closed-loop system has been converted to a switched system. By the aid of the Lyapunov stability theorem, sufficient condition ensuring MSES has been given for the closed-loop system. Moreover, the OGM and CGM have been obtained by solving the nonlinear minimization problem. Finally, the effectiveness of the nonfragile NPCS proposed has been verified by providing an illustrative example. Further research includes extending the event-triggered nonfragile predictive control method to nonlinear systems (Tan, 2017; Tan et al., 2021).
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (grant nos. 12071102 and 61673141) and the Natural Science Foundation of Heilongjiang Province of China (grant no. ZD2022F003).
ORCID iDs
Hairui Zhao
Dongyan Chen
Data accessibility statement
All data generated or analyzed during this study are included in this published article.
References
1.
ArumugamALiuYRRathinasamyS, et al. (2020) Distributed event-triggered nonfragile control for networked nonlinear systems with energy constraints and redundant channels: Observer-based case. International Journal of Robust and Nonlinear Control30(17): 7150–7168.
2.
DengCCheWWWuZG (2021a) A dynamic periodic event-triggered approach to consensus of heterogeneous linear multiagent systems with time-varying communication delays. IEEE Transactions on Cybernetics51(4): 1812–1821.
3.
DengYRYinXXHuSL (2021b) Event-triggered predictive control for networked control systems with DoS attacks. Information Sciences542: 71–91.
4.
FengJLHaoF (2020) Event-triggered sliding mode control for time-delay uncertain systems. Asian Journal of Control23(3): 1407–1418.
5.
GaoHYDongHLWangZD, et al. (2020) An event-triggering approach to recursive filtering for complex networks with state saturations and random coupling strengths. IEEE Transactions on Neural Networks and Learning Systems31(10): 4279–4289.
6.
HanYCLianJ (2021) Event-triggered control of networked switched systems under network attacks. Transactions of the Institute of Measurement and Control44(6): 1334–1343.
7.
HuJZhangHXLiuHJ, et al. (2021) A survey on sliding mode control for networked control systems. International Journal of Systems Science52(6): 1129–1147.
8.
LiBWangZDMaLF, et al. (2019a) Observer-based event-triggered control for nonlinear systems with mixed delays and disturbances: The input-to-state stability. IEEE Transactions on Cybernetics49(7): 2806–2819.
9.
LiJRNiuYGYangYK (2021) Output-feedback control under hidden Markov analog fading and redundant channels. IEEE Transactions on Circuits and Systems II-Express Briefs68(8): 2922–2926.
10.
LiYJLiuGPSunSL, et al. (2019b) Prediction-based approach to finite-time stabilization of networked control systems with time delays and data packet dropouts. Neurocomputing329: 320–328.
11.
LiangHJLiuGLZhangHG, et al. (2021) Neural-network-based event-triggered adaptive control of nonaffine nonlinear multiagent systems with dynamic uncertainties. IEEE Transactions on Neural Networks and Learning Systems32(5): 2239–2250.
12.
LiuDWangLJPanYN, et al. (2016) Mean square exponential stability for discrete-time stochastic fuzzy neural networks with mixed time-varying delay. Neurocomputing171: 1622–1628.
13.
LiuGP (2016) Consensus and stability analysis of networked multiagent predictive control systems. IEEE Transactions on Cybernetics47(4): 1114–1119.
14.
LiuGP (2022a) Coordination of networked nonlinear multi-agents using a high-order fully actuated predictive control strategy. IEEE-CAA Journal of Automatica Sinica9(4): 615–623.
15.
LiuGP (2022b) Predictive control of high-order fully actuated nonlinear systems with time-varying delays. Journal of Systems Science and Complexity35(2): 457–470.
16.
LiuHJWangZDFeiWY, et al. (2021a) On finite-horizon state estimation for discrete-time delayed memristive neural networks under stochastic communication protocol. Information Sciences555: 280–292.
17.
LiuSWangZDShenB, et al. (2021b) Partial-neurons-based state estimation for delayed neural networks with state-dependent noises under redundant channels. Information Sciences547: 931–944.
18.
LiuYYangGHLiXJ (2017) Fault-tolerant control for uncertain linear systems via adaptive and LMI approaches. International Journal of Systems Science48(2): 347–356.
19.
LvZHLouRRSingAK (2021) AI empowered communication systems for intelligent transportation systems. IEEE Transactions on Intelligent Transportation Systems22(7): 4579–4587.
20.
MuthukumarPArunagirinathanSLakshmananS (2019) Nonfragile sampled-data control for uncertain networked control systems with additive time-varying delays. IEEE Transactions on Cybernetics49(4): 1512–1523.
21.
PangZHBaiCDLiuGP, et al. (2021a) A novel networked predictive control method for systems with random communication constraints. Journal of Systems Science and Complexity34(4): 1364–1378.
22.
PangZHFanLZGuoHB, et al. (2022a) Security of networked control systems subject to deception attacks: A survey. International Journal of Systems Science53(16): 3577–3598.
23.
PangZHLuoWCLiuGP, et al. (2021b) Observer-based incremental predictive control of networked multi-agent systems with random delays and packet dropouts. IEEE Transactions on Circuits and Systems II-Express Briefs68(1): 426–430.
24.
PangZHZhengCBLiC, et al. (2022b) Cloud-based time-varying formation predictive control of multi-agent systems with random communication constraints and quantized signals. IEEE Transactions on Circuits and Systems II: Express Briefs69(3): 1282–1286.
25.
PongsakornsathienNLimYGardiA, et al. (2019) Sensor networks for aerospace human-machine systems. Sensors19(16): 3465–3465.
26.
QuFRZhaoXWangXM, et al. (2022) Probabilistic-constrained distributed fusion filtering for a class of time-varying systems over sensor networks: A torus-event-triggering mechanism. International Journal of Systems Science53(6): 1288–1297.
27.
RouamelMGherbiSBourahalaF (2020) Robust stability and stabilization of networked control systems with stochastic time-varying network-induced delays. Transactions of the Institute of Measurement and Control42(10): 1782–1796.
28.
SakthivelRPriyaRMWangC, et al. (2019) Observer-based finite-time non-fragile control for nonlinear systems with actuator saturation. Journal of Computational and Nonlinear Dynamics14(1): 426–430.
29.
ShenBWangZDWangD, et al. (2020a) Distributed state-saturated recursive filtering over sensor networks under Round-Robin protocol. IEEE Transactions on Cybernetics50(8): 3605–3615.
30.
ShenHLiFCaoJD, et al. (2020b) Fuzzy-model-based output feedback reliable control for network-based semi-Markov jump nonlinear systems subject to redundant channels. IEEE Transactions on Cybernetics50(11): 4599–4609.
31.
ShenYXWangZDShenB, et al. (2021) Outlier-resistant recursive filtering for multisensor multirate networked systems under weighted try-once-discard protocol. IEEE Transactions on Cybernetics51(10): 4897–4908.
32.
SunJChenJ (2014) Networked predictive control for systems with unknown or partially known delay. IET Control Theory and Applications8(18): 2282–2288.
33.
SunYTianXWeiGL (2022) Finite-time distributed resilient state estimation subject to hybrid cyber-attacks: A new dynamic event-triggered case. International Journal of Systems Science53(13): 2832–2844.
34.
SuoJHLiN (2022) Observer-based synchronisation control for discrete-time delayed switched complex networks with coding-decoding approach. International Journal of Systems Science53(13): 2711–2728.
35.
TanCYangLZhangFF, et al. (2019) Stabilization of discrete time stochastic system with input delay and control dependent noise. Systems and Control Letters123: 62–68.
36.
TanLN (2017) Adaptive dynamic programming-based design of integrated neural network structure for cooperative control of multiple MIMO nonlinear systems. Neurocomputing237: 12–24.
37.
TanLNCongTPCongDP (2021) Neural network observers and sensorless robust optimal control for partially unknown PMSM with disturbances and saturating voltages. IEEE Transactions on Power Electronics36(10): 12045–12056.
38.
TanLNGuptaNDerawiM (2023) control for oscillator systems with event-triggering signal transmission of internet of. IEEE Access11: 8938–8949.
39.
TanLNTranHTTrranTT (2022) Event-triggered observers and distributed control of physically interconnected nonholonomic mechanical agents in harsh conditions. IEEE Transactions on Systems Man Cybernetics-systems52(12): 7871–7884.
40.
WangLCWangZDWeiGL, et al. (2019) Variance-constrained state estimation for time-varying multi-rate systems with redundant channels: The finite-horizon case. Information Sciences501: 222–235.
41.
XuYChuCYLiWX (2018) Quantized feedback control scheme on coupled systems with time delay and distributed delay: A finite-time inner synchronization analysis. Applied Mathematics and Computation337: 315–328.
42.
YangHJGuoXDDaiL, et al. (2018) Event-triggered predictive control for networked control systems with network-induced delays and packet dropouts. International Journal of Robust and Nonlinear Control28(4): 1350–1365.
43.
YangJJMaLFChenYG, et al. (2020) – state estimation for continuous stochastic delayed neural networks via memory event-triggering strategy. International Journal of Systems Science53: 2742–2757.
44.
ZhangSJDingDRWeiGL, et al. (2017) state estimation for artificial neural networks over redundant channels. Neurocomputing226: 117–125.
45.
ZhangTYYouBLiuGP (2020a) Motion coordination for a class of multi-agents via networked predictive control. Journal of Systems Science and Complexity33(3): 622–639.
46.
ZhangXMHanQLGeH, et al. (2020b) Networked control systems: A survey of trends and techniques. IEEE-CAA Journal of Automatica Sinica7(1): 1–17.
47.
ZhaoYHLiuYFMaYC (2021a) Robust finite-time sliding mode control for discrete-time singular system with time-varying delays. Journal of the Franklin Institute-Engineering and Applied Mathematics358(9): 4848–4863.
48.
ZhaoZYWangZDZouL, et al. (2021b) Finite-time state estimation for delayed neural networks with redundant delayed channels. IEEE Transactions on Systems Man Cybernetics-Systems51(1): 441–451.
49.
ZouYYSuXNiuYG (2017) Event-triggered distributed predictive control for the cooperation of multi-agent systems. IET Control Theory and Applications11(1): 10–16.