
Abstract
The optimal performance of the Kalman filters is highly dependent on the measurement and process noise characteristics, making the whole system unable to achieve the desired estimation in the presence of non-Gaussian mean noise distribution and high initial uncertainties. Recently, the H-infinity filter, as a robust algorithm, has been broadly used, as it is not being dependent on the pre-knowledge of the noise nature; however, making a balance between high robustness and estimation accuracy is a challenging issue. Hence, to overcome this problem, a new adaptive H-infinity extended Kalman filter (AHEKF) was designed in this paper, which benefits from both high robustness and precision. The suggested algorithm contains two adaptive sections to achieve high accuracy as well as controlling the effects of time-varying noise characteristics, high initial uncertainties, and abnormal data that can degrade the accuracy of state estimation in an integrated navigation system. The presented algorithm was used to integrate data from two independent sensors data. The simulation results for an inertial navigation system (INS)/global positioning system (GPS) sensor fusion are presented and compared with the standard H-infinity filter, extended Kalman filter (EKF), and unscented Kalman filter (UKF) to show the effectiveness of the proposed algorithm. Evaluations demonstrate that the AHEKF achieves over 50% higher accuracy and robustness, and over 2.5 times faster convergence of estimation errors than the standard H-infinity filter.
Keywords
Introduction
Inertial navigation system (INS) and global positioning system (GPS) are extensively used for positioning and attitude determination for aircraft and vehicle navigation or tracking, marine applications, and so on. It is well known that GPS-like signals are susceptible to jamming or being lost due to electromagnetic wave limitation (Liu et al., 2018). In addition, all INSs suffer from integration drift; small errors in the measurement of angular velocity and acceleration are integrated into larger errors in velocity and position (Hu et al., 2015; Sabzevari and Chatraei, 2021). Due to these limitations, the GPS/INS integration provides more accurate performance in comparison with GPS or INS standalone (Wang et al., 2006). Efficient sensor fusion algorithms and methods based on Kalman filter were proposed (Sasiadek and Wang, 2003). To improve the navigation system accuracy, extensive researches have been done to fuse the information of data from different sensors based on the Kalman filters (KFs) approach (Liu et al., 2018; Van Der Merwe et al., 2004). The divergence problem of standard KFs due to poor knowledge of the models or non-Gaussian noises are the most challenging issue (Hu et al., 2015; Huang et al., 2017; Wang et al., 2017). Unlike the standard KFs, which require detailed knowledge of the noise, the H-infinity filters require no prior assumption of process and measurement noise (Simon, 2006). As a result, it is a more efficient algorithm than standard KFs (Gong et al., 2020). Multitude types of H-infinity filter solutions have been considered such as game theory (Shen and Deng, 1997), frequency domain (Grimble and El Sayed, 1990), and Krein -space approach in terms of the state-space form (Hassibi et al., 1999). Although the Krein space approach is used for linearized systems, it can be utilized for the nonlinear system based on the extended Kalman filter (EKF) (Zhao, 2017). Despite the good performance of H-infinity filters, there are many circumstances such as model uncertainty, and environmental disturbances, resulting in information fusion hindrance and low accuracy of estimations (Havangi, 2015; Yu et al., 2014). In addition, inaccurate estimation of initial values can make the filter unstable. To manage these limitations, adaptive approaches have been proven to be an effective strategy (Yang and Gao, 2006). Multiple types of adaptive formation have been studied like innovation and residual-based adaptive KFs (Aghili and Su, 2016; Tong et al., 2017), in which only the adaption of the measurement noise and gain matrix is considered. Some others like Shao et al. (2016) use adaptive EKF, in which both measurement and process covariance matrices are considered as adaptive ones. Although the multiple-model-based adaptive estimation (MMAE) can somehow overcome the model uncertainty, due to implementing multiple banks of KFs, the computational burden would impact the system performance (Kottath et al., 2017). The adaptive fuzzy algorithm is proposed in Assad et al. (2019), Yazdkhasti and Sasiadek (2018), and Yazdkhasti et al. (2016), which is based on EKF, weighted EKF, and unscented Kalman filter (UKF), improving the estimation accuracy by adaption of the process (
Therefore, to tackle the aforementioned problems, in this paper a novel adaptive H-infinity extended Kalman filter (AHEKF) is designed. The contribution of this paper is as follows: First, an adaptive factor is assumed to tune
The rest of the paper is structured as follows: The second section represents the principle of the HEKF. In the third section, the adaptive structure is proposed in which an adaptive scale factor is used to converge the effect of non-zero mean noises more rapidly. In addition, the adaption of
The H-infinity extended Kalman filter
The HEKF makes robust estimations against environmental noises. As a result, it is widely used in industrial applications (Grimble and El Sayed, 1990; Shen and Deng, 1997; Simon, 2006). Unlike the standard KFs, the HEKF requires no primary assumption of the noise characteristics. The KFs minimize the mean squared error of the estimation error, while the HEKF minimizes the highest estimation error, which makes it more robust than the various KFs such as EKF and UKF (Hassibi et al., 1996, 1999; Zhao, 2017). The nonlinear system model is defined as follows (Hassibi et al., 1996; Simon, 2006)


where


The HEKF would not only finite the upper bound on estimation error, but also minimize this upper bound. Following this, a cost function is defined as follows (Hassibi et al., 1999; Simon, 2006; Zhao and Mili, 2019)

where

where



where

where

where


By attending


where
In this case, a Krein space model as a sub-optimal solution is used to address the optimal H-infinity problem as its analytical solution was a complicated method to achieve (Havangi, 2015; Shen and Deng, 1997; Simon, 2006). Also, the threshold value should be tuned precisely, since inaccurate tuning may cause the filter divergence; however, there is no actual upper level for this threshold. Hence, to maintain both robustness and accuracy, in this paper, an adaptive algorithm is designed to overcome these issues and make estimations more accurate and flexible by tuning the error covariance matrix as well as
The adaptive H-infinity extended Kalman filter
Various kinds of adaptive and robust KFs have been studied (Kottath et al., 2017; Wang et al., 2006; Yang et al., 2001). In most cases, the suggested algorithm was neither accurate nor robust enough to deal with system model uncertainties, non-Gaussian noise distribution, and outliers (Liu et al., 2008; Shao et al., 2016). Therefore, in this paper, to overcome the influence of abnormal observations in measurement, noise characteristics variation, system instability, and inaccuracy, the AHEKF is designed. The AHEKF algorithm consists of two adaption sections: first, an adaptive scale factor based on HEKF, which can converge the effect of non-zero mean noises more rapidly; second, the adaption of
Adaptive scale factors
In this section, the proposed AHEKF is developed by using an adaptive scale factor

In addition, the covariance matrix of the residual vector is defined as (Aghili and Su, 2016; Sabzevari and Chatraei, 2021)

By using the covariance matrix of the residual, the adaptive factor is defined as

where

Consequently, the adaptive scale factor can be employed as follows

where

Therefore, in this section, AHEKF is developed based on a scale factor
Rk and Qk adaption weights
Although HEKF does not require knowing the nature of the measurement and process noise, for optimal performance the

where

where

where
Correspondingly, the process covariance matrix will be modified if errors are intensified significantly (Shao et al., 2016). Therefore, the adaption of
where the innovation vector is defined as


Second, the measurement update phase based on the residual provided by new measurements can be obtained, which involves the adaptive factors



where

Finally, this adaptive factor will benefit the proposed algorithm to avoid the influence of high initial uncertainties and variation of noise nature in the navigation system. In addition, the block diagram of the proposed AHEKF method is presented in Figure 1 to demonstrate the whole structure.
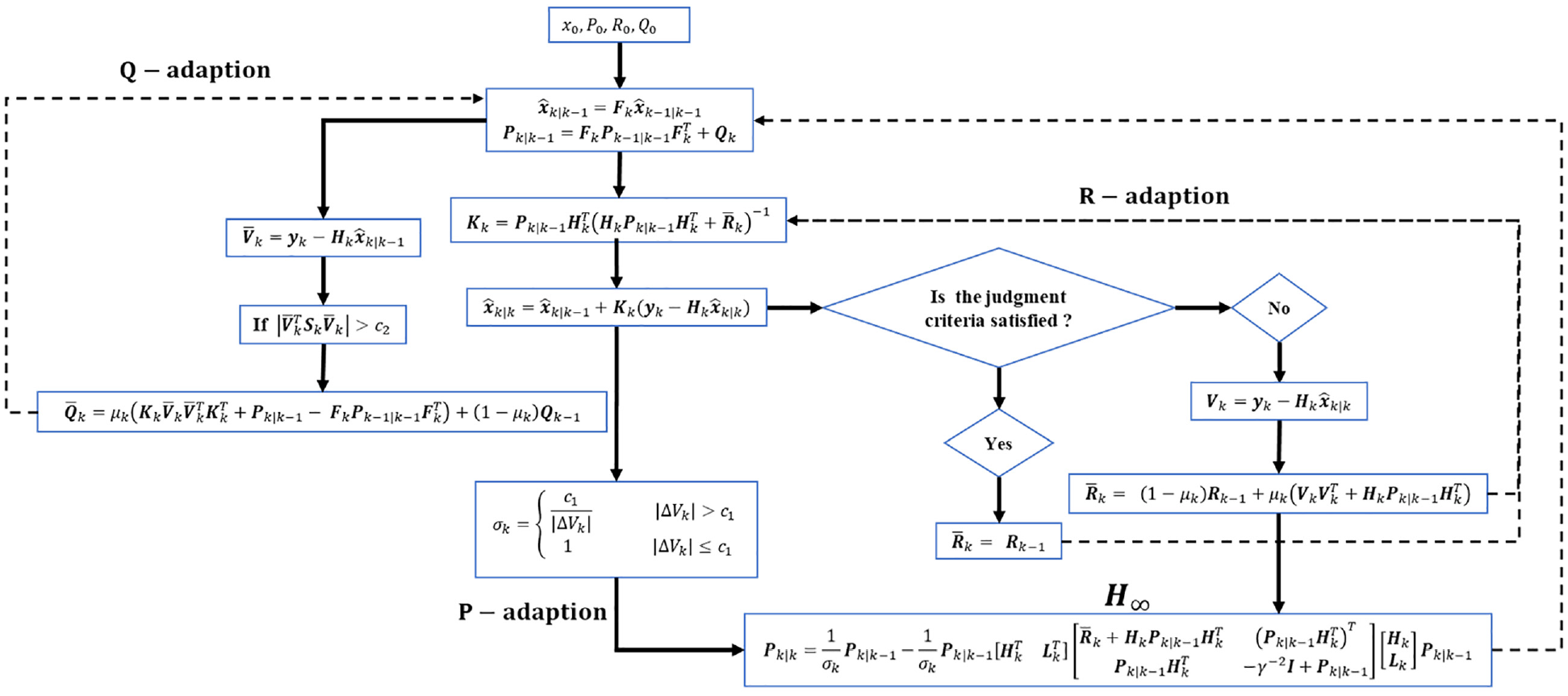
The block diagram of AHEKF.
Results
The simulation experiment has been done to evaluate the performance of the proposed AHEKF. The state vectors used in the simulation included three states for INS position errors, three for INS velocity errors, and two states for GPS range drift and range bias (Yazdkhasti and Sasiadek, 2018). The initial conditions were selected as follows

Pseudo range equations were implemented as a measurement model of the AHEKF

where

With
The AHEKF parameters are designed based on experience. To have both minimum variance and high robustness,
The simulations were performed based on a laptop that was equipped with a Core-i7 CPU, 8GB of RAM, and MATLAB2019a software. The time comparison has been compared between four different KF types involving AHEKF, UKF, EKF, and HEKF. The results are shown in Table 1.
Time consumption comparison.

It is obvious from Table 1 that EKF has the lowest time consumption in contrast to UKF, which has the highest one. The time consumption of HEKF is a bit higher than EKF and lower than AHEKF, which lasts 6.36 seconds. The reason that AHEKF lasts longer than HEKF is due to the computation of the adaption sections. Although AHEKF does not have the lowest running time, it has still much lower time consumption than UKF. To evaluate the algorithm in more details, four different schemes are considered to make an accurate comparison between different KF algorithms.
Scheme 1: Robustness against high initial uncertainties
In this case, the performance of four different filters affected by high initial uncertainties is considered, in which
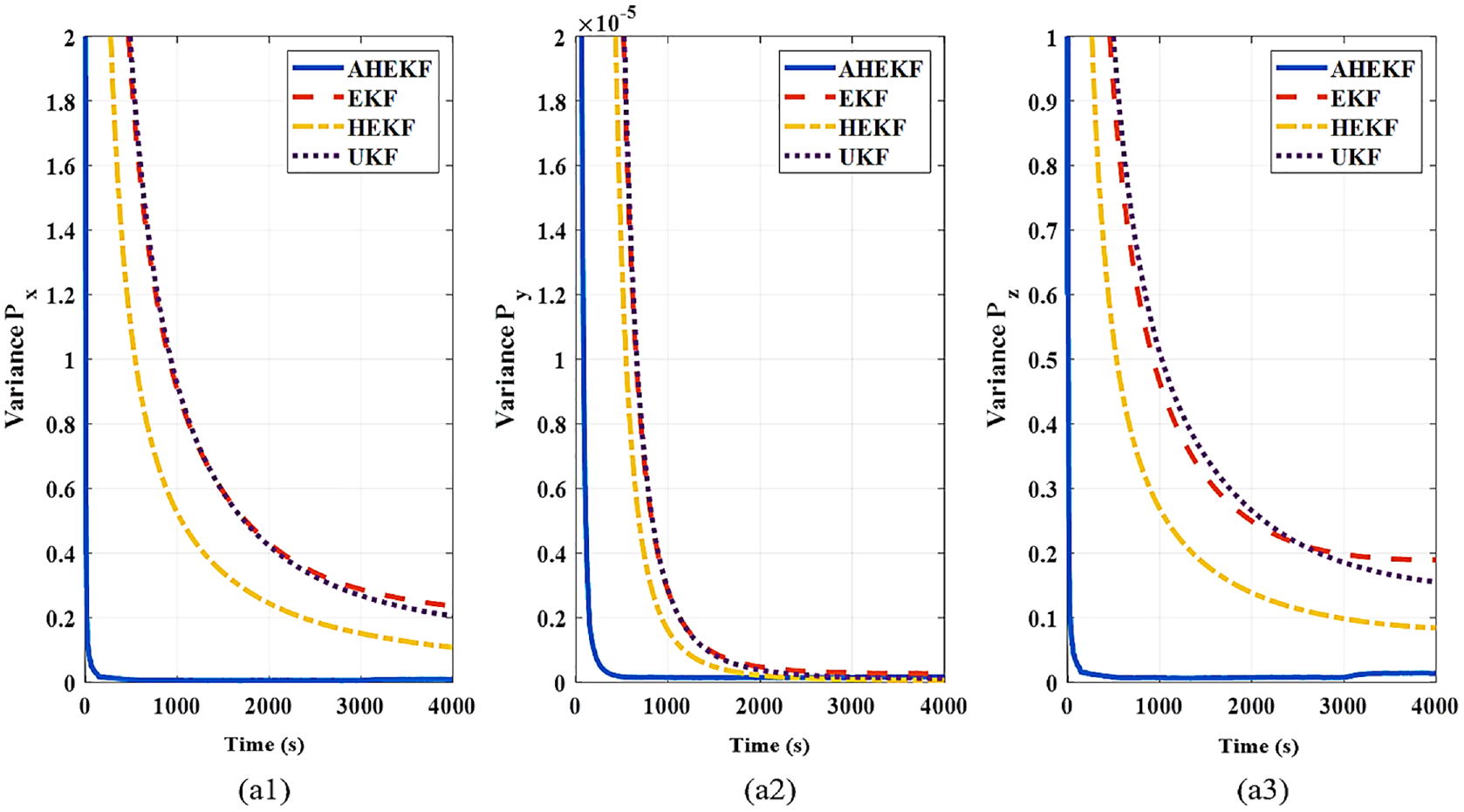
To evaluate the performance of the proposed AHEKF, all filters have been tested for various parameter uncertainties. The effects of four different uncertainty values on the filter’s variance are shown in Figure 2 which illustrates the variance of AHEKF, UKF, EKF, and HEKF when the highest uncertainty, 3
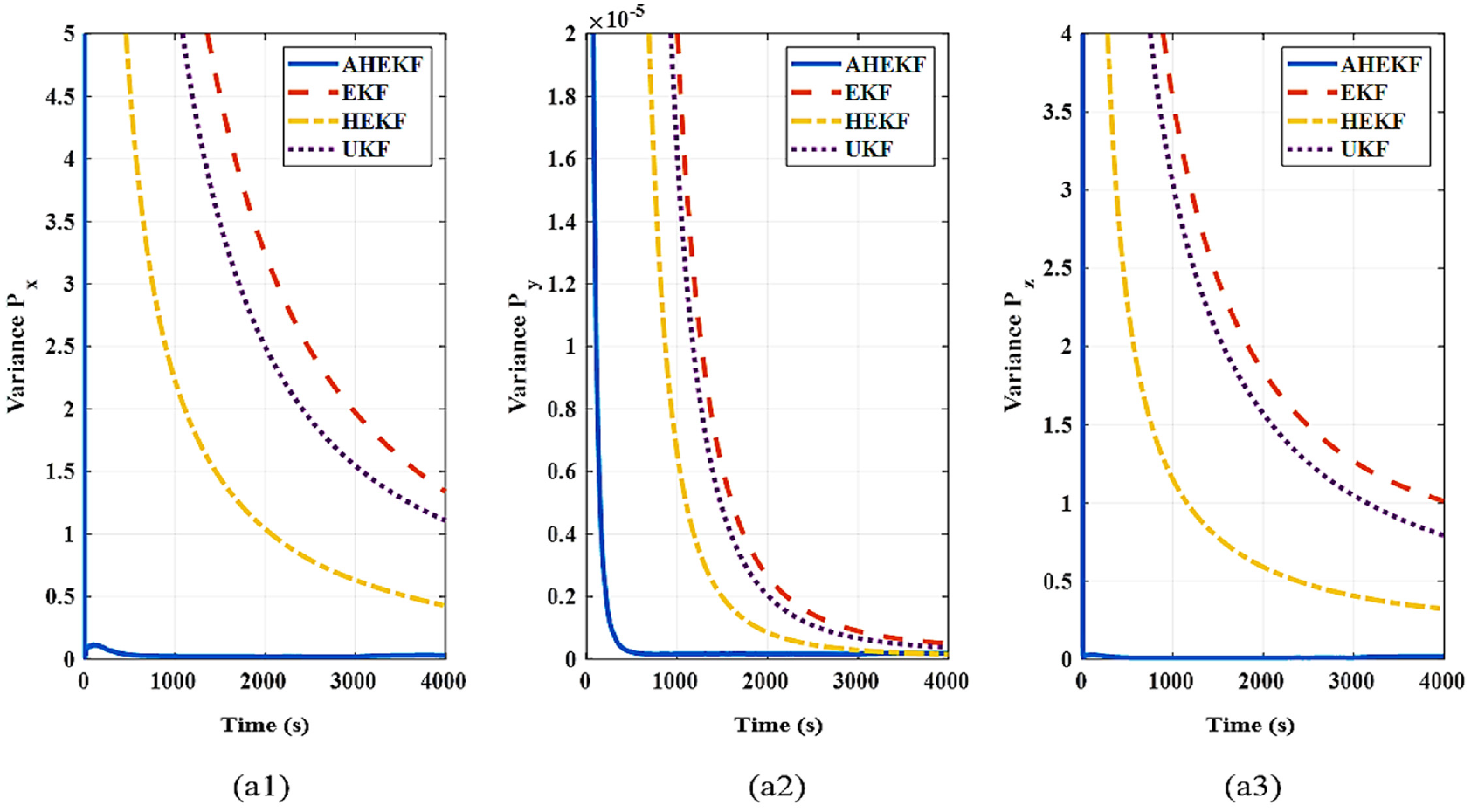
Position variance comparison: (a1):
3
The simulation was repeated for different covariance values (
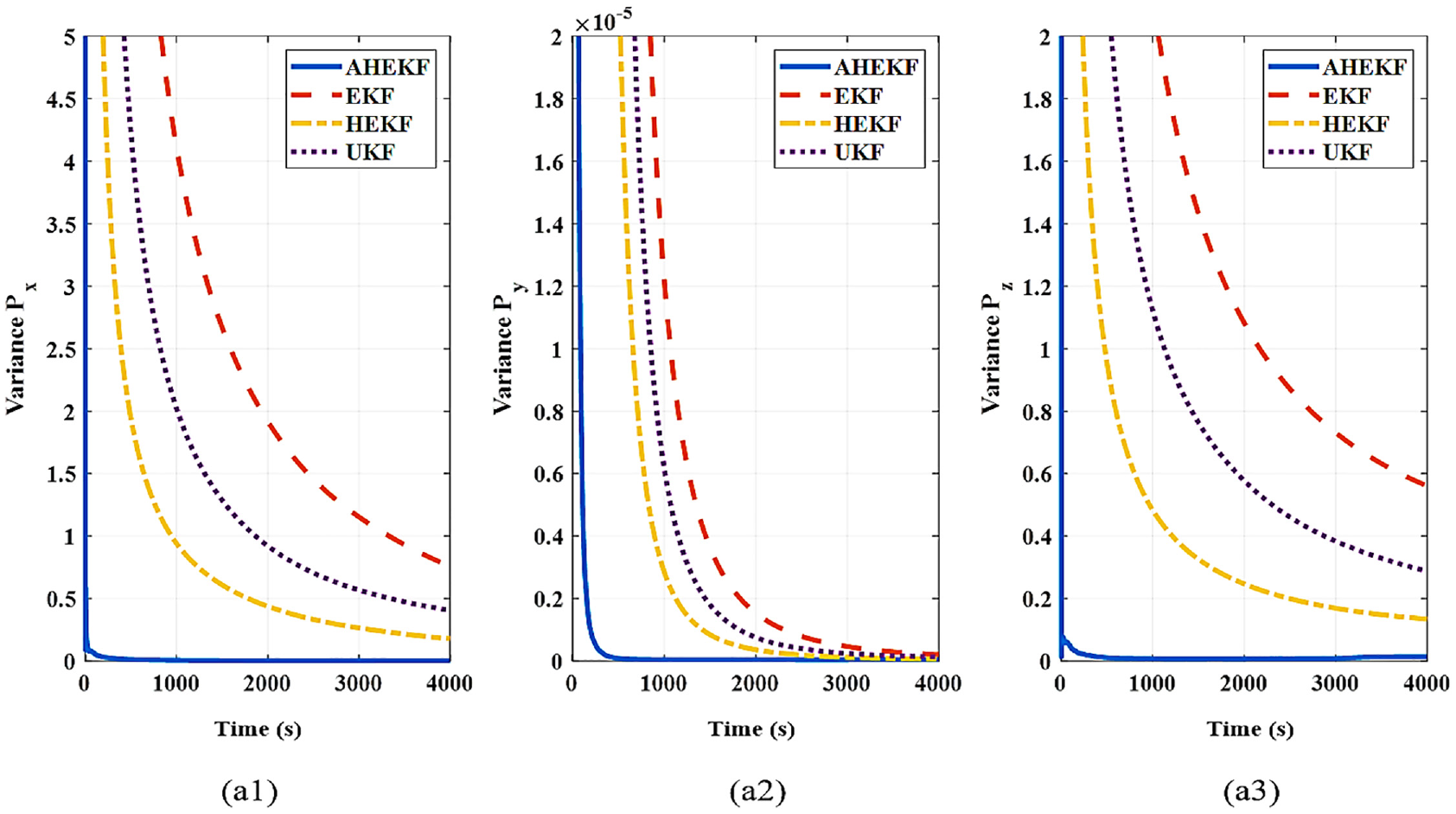
Position variance comparison: (a1):
Position variance comparison: (a1):
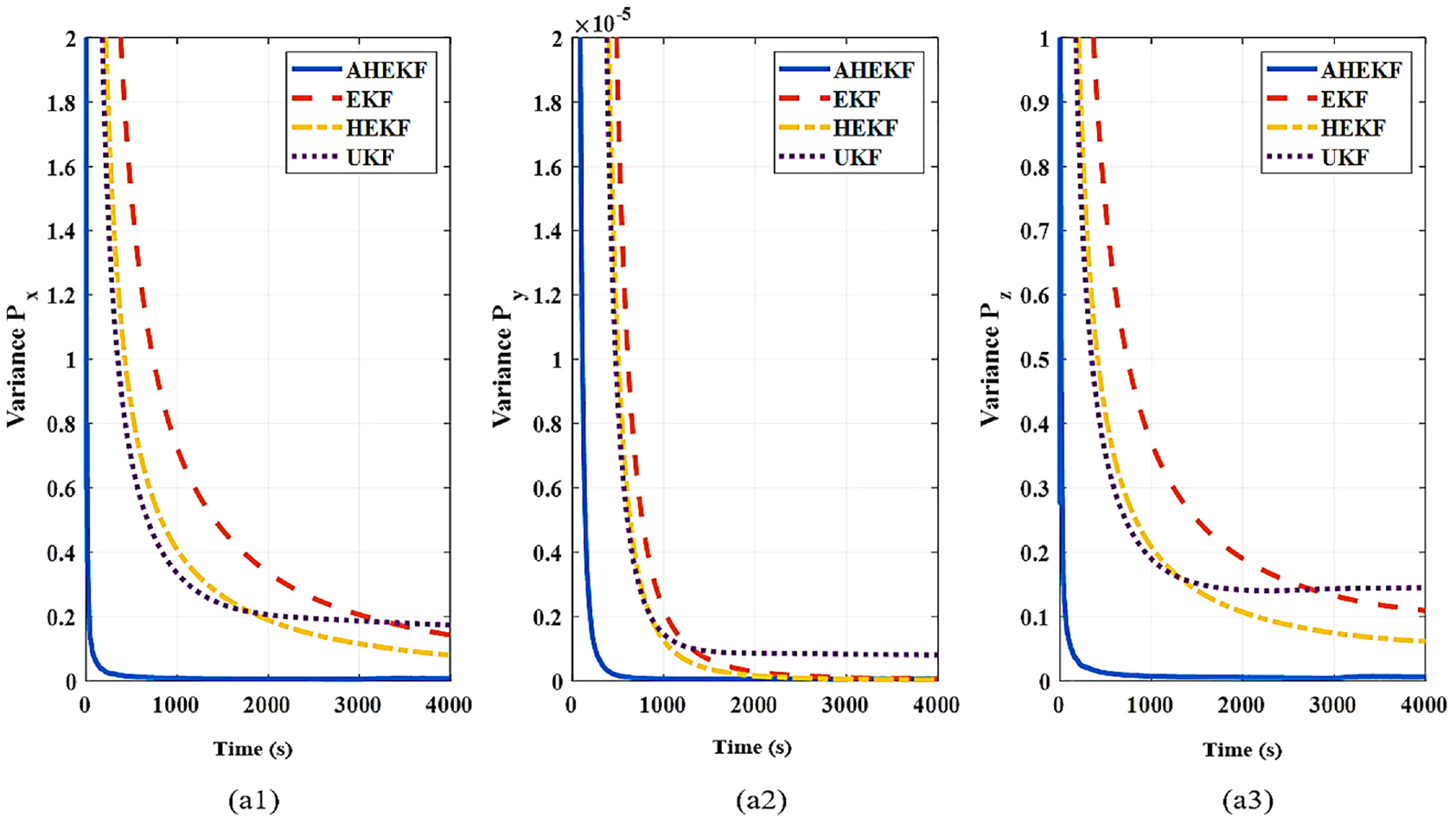
Position variance comparison: (a1):
Scheme 2: Robustness against non-zero mean noise
For the second part of the simulation experiment, the performance of all filters is evaluated for different non-zero mean noise values. This set of experiments aims to evaluate the effect of non-zero mean noise on the accuracy of the state estimation. The position errors are presented in Figure 6(a) and velocity errors in Figure 6(b). They represent the corrected position and velocity errors of the AHEKF, HEKF, UKF, and EKF when the noise mean variable is µ = 0.1, as it shows the AHEKF has the lowest position and velocity errors in comparison with other filters. The corrected position and velocity errors of the filters when the noise mean is µ = 0.5 are presented in Figure 7. Also, Figure 8 represents the corrected position and velocity errors of the filters when the non-zero mean is µ = 1.2.
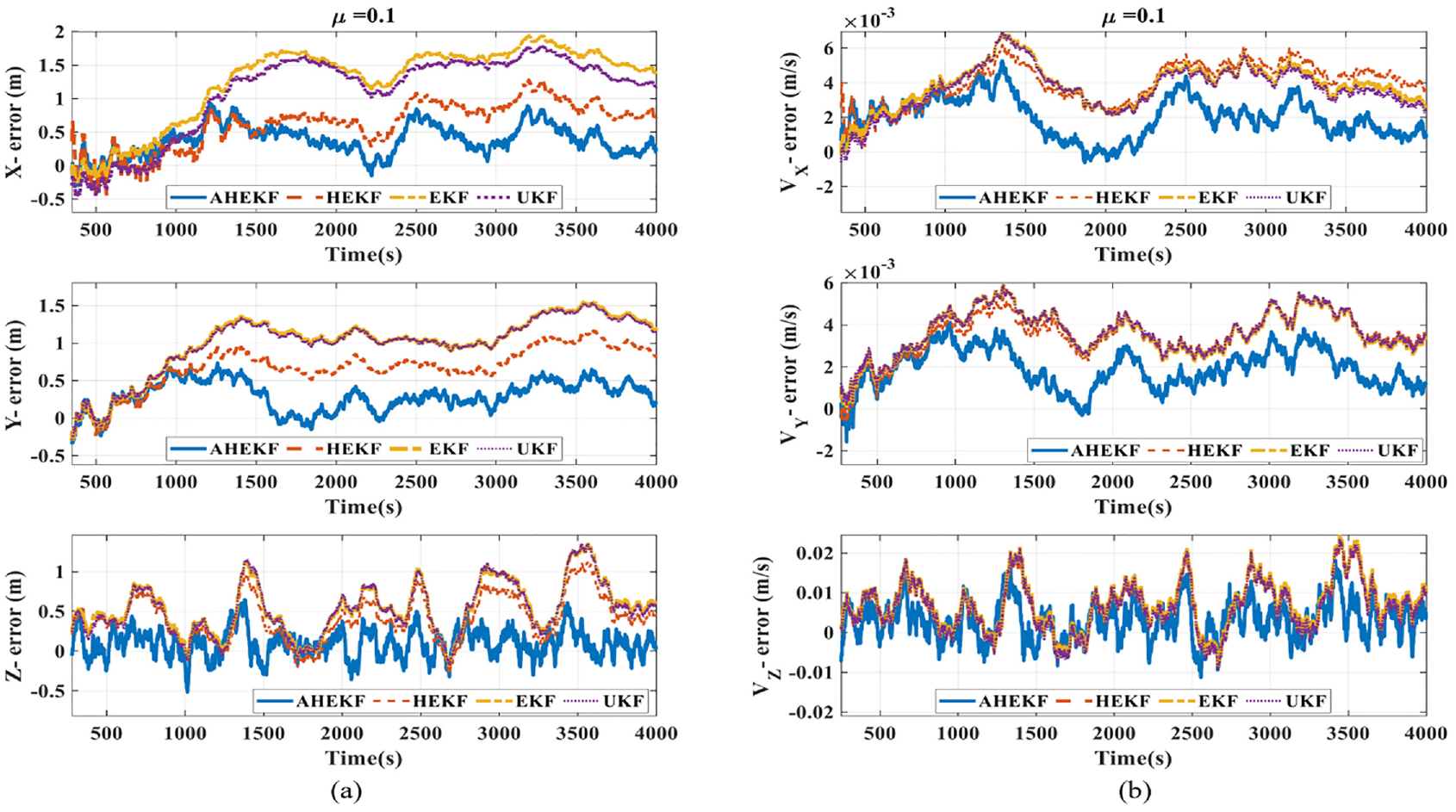
Errors comparison, when non-zero mean is µ = 0.1: (a) Position errors. (b) Velocity errors.
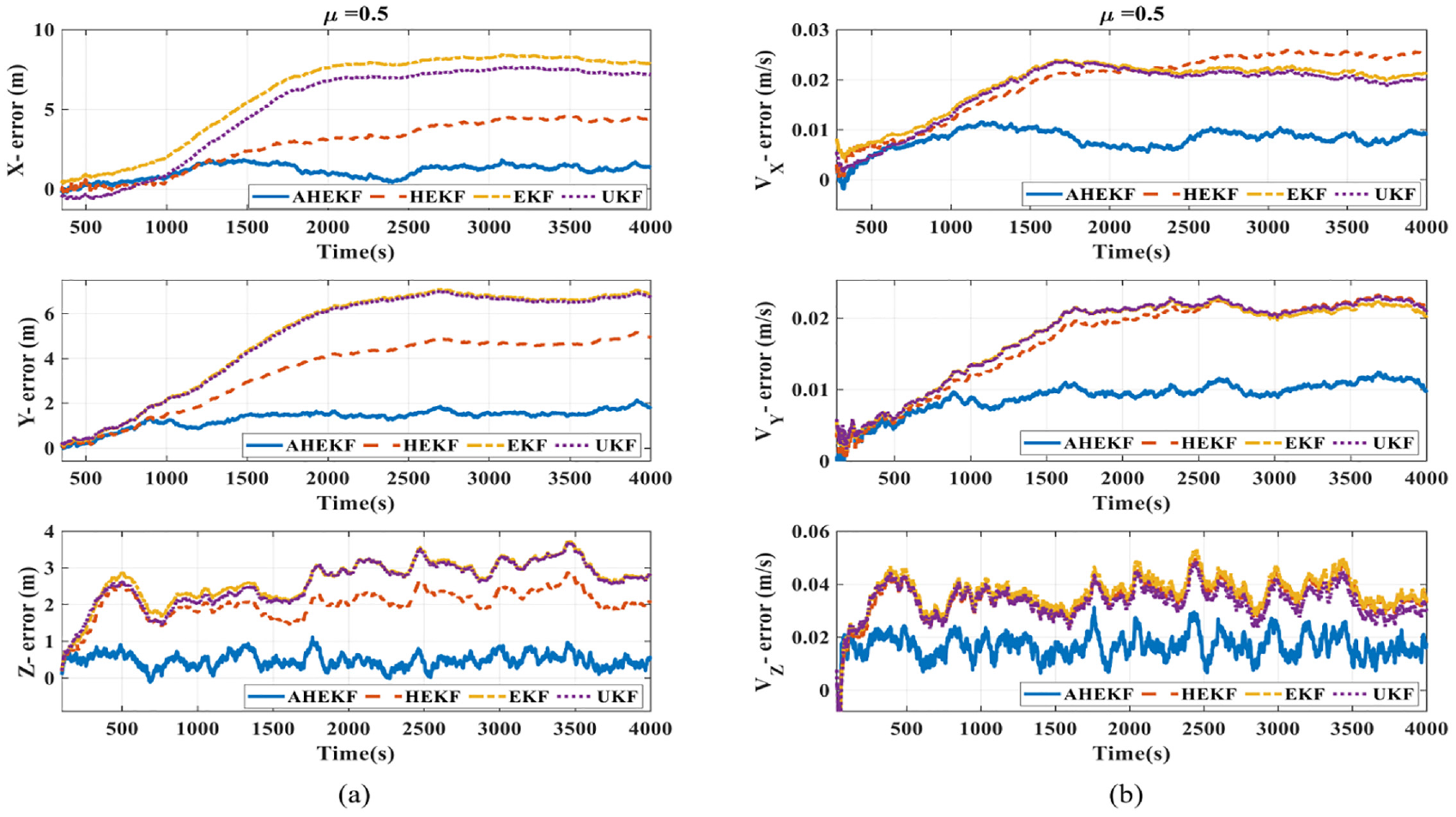
Errors comparison, when non-zero mean is µ = 0.5: (a) Position errors. (b) Velocity errors.
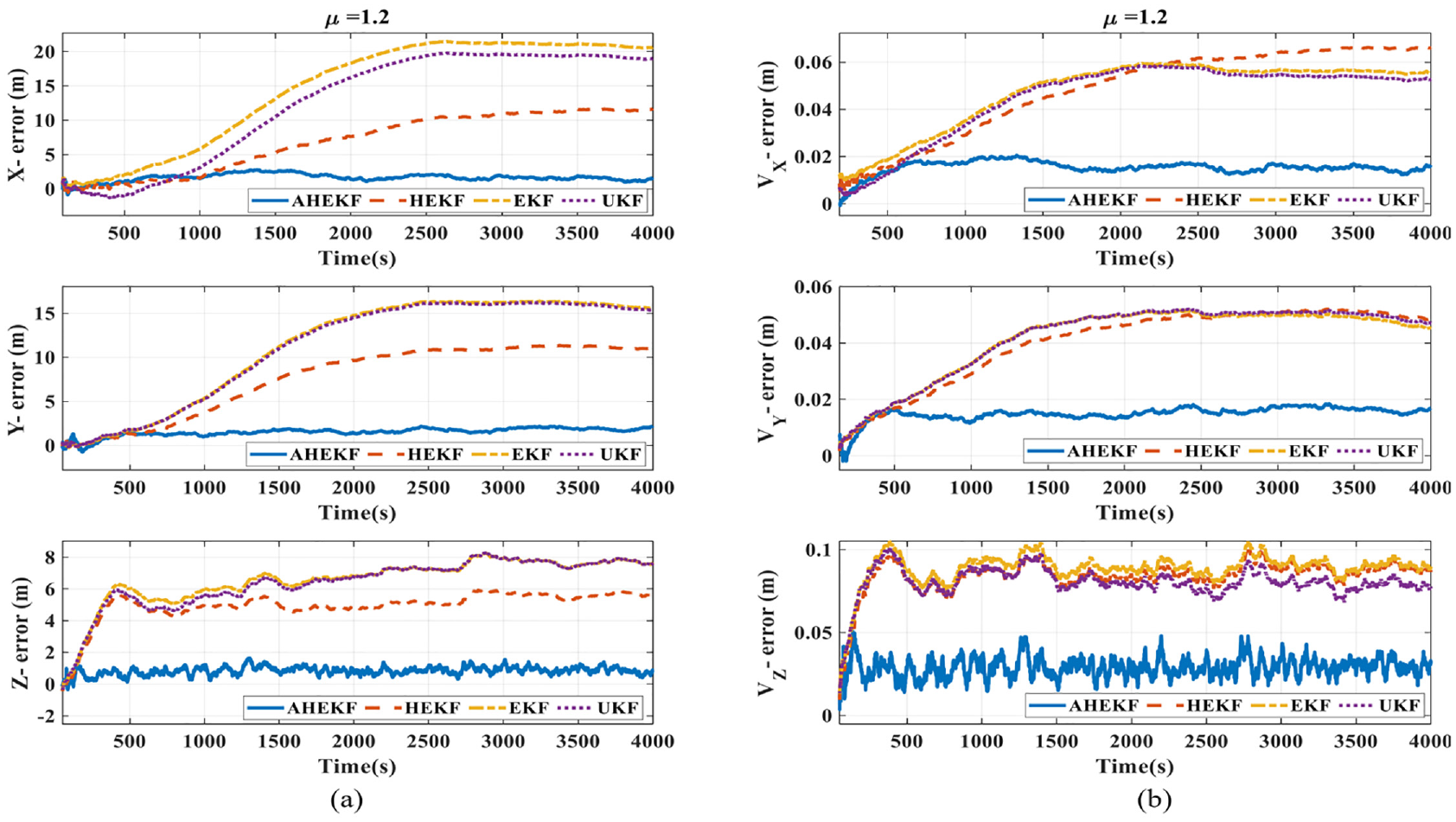
Errors comparison, when non-zero mean is µ = 1.2: (a) Position errors. (b) Velocity errors.
It should be noted that the corrected error is defined as the current INS error minus the estimated INS error. As it illustrates, when the mean increases the position and velocity errors of the proposed AHEKF remain close to zero while the others diverge to high values.
As the non-zero mean noise increases, the adaptive structure would decrease the effect of noise characteristics varying. Therefore, when the non-zero mean noise increases, AHEKF shows higher robustness in the position error by over 50% improvement rather than the classic HEKF procedure and over 120% for EKF and UKF methods. It can be concluded from this section that, AHEKF performs the best compared with other procedures to deal with the non-zero mean noise caused by model uncertainty or biased measurements.
Scheme 3: The worst-case condition
In this section, to appraise the algorithm efficiency, both high initial uncertainties and non-zero mean noise are simultaneously assumed as the initial condition. Following this, multiple cases have been evaluated in which different coefficients of initial process and measurement covariance matrices, and various means of non-zero mean noises are considered as well. Figures 9 to 10 illustrate the position and velocity Root mean square (RMS) errors in all X, Y, and Z directions, separately. In position errors, it is obvious that when
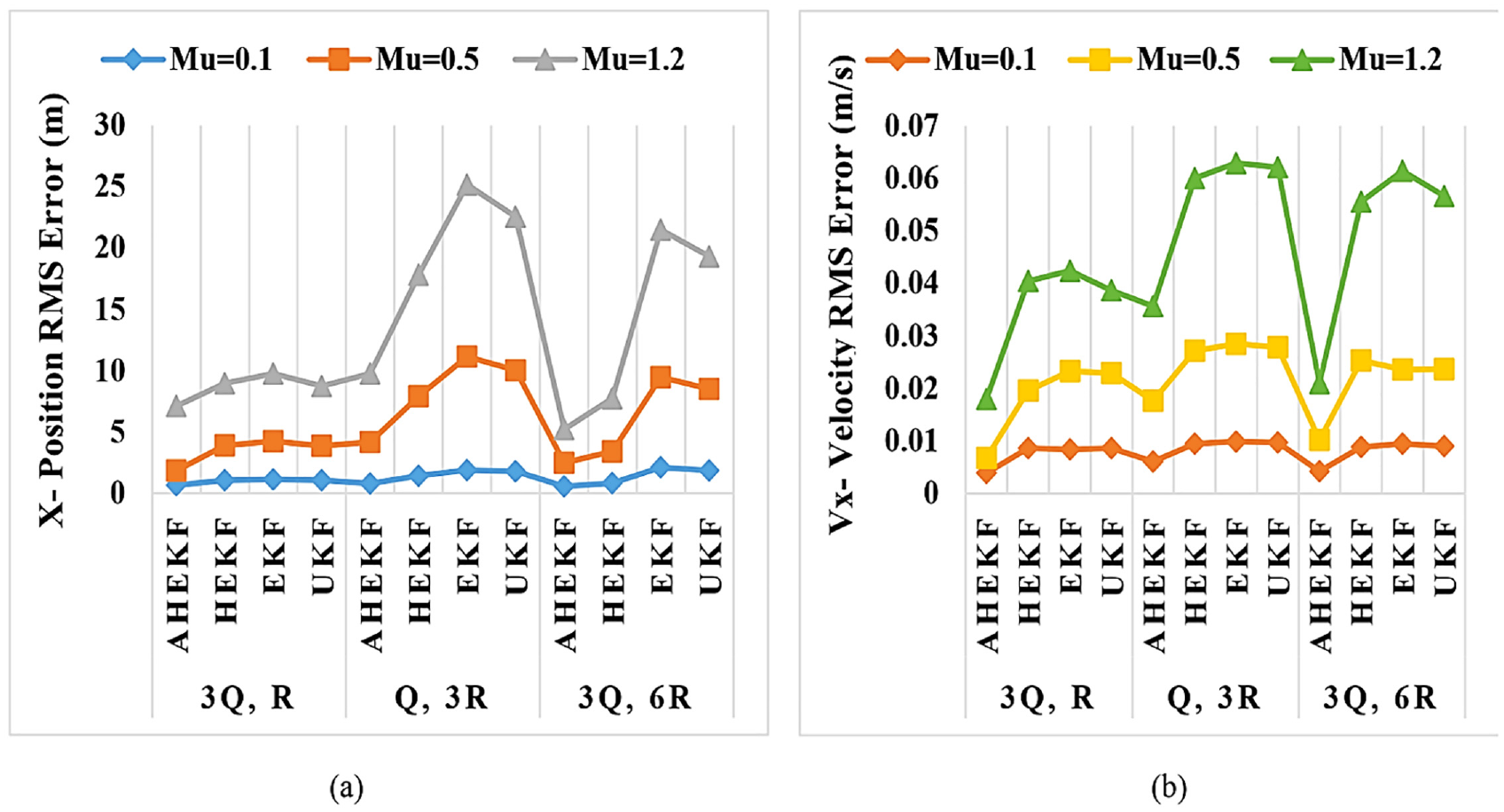
RMS errors comparison in X-direction, when both non-zero means and high initial uncertainties are applied: (a): X-Position, (b): X-Velocity.
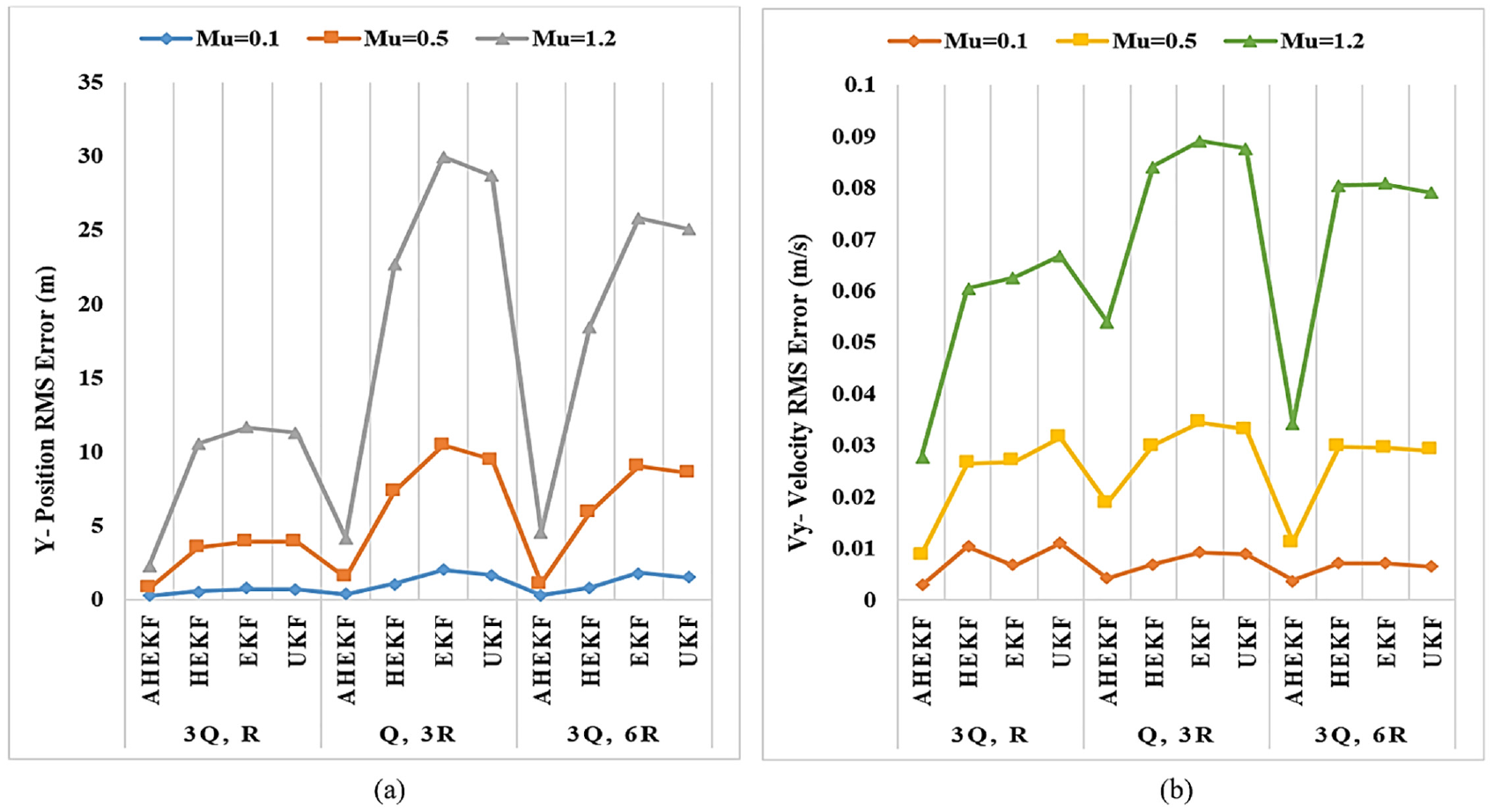
RMS errors comparison in Y-direction, when both non-zero means and high initial uncertainties are applied: (a): Y-Position, (b): Y-Velocity.
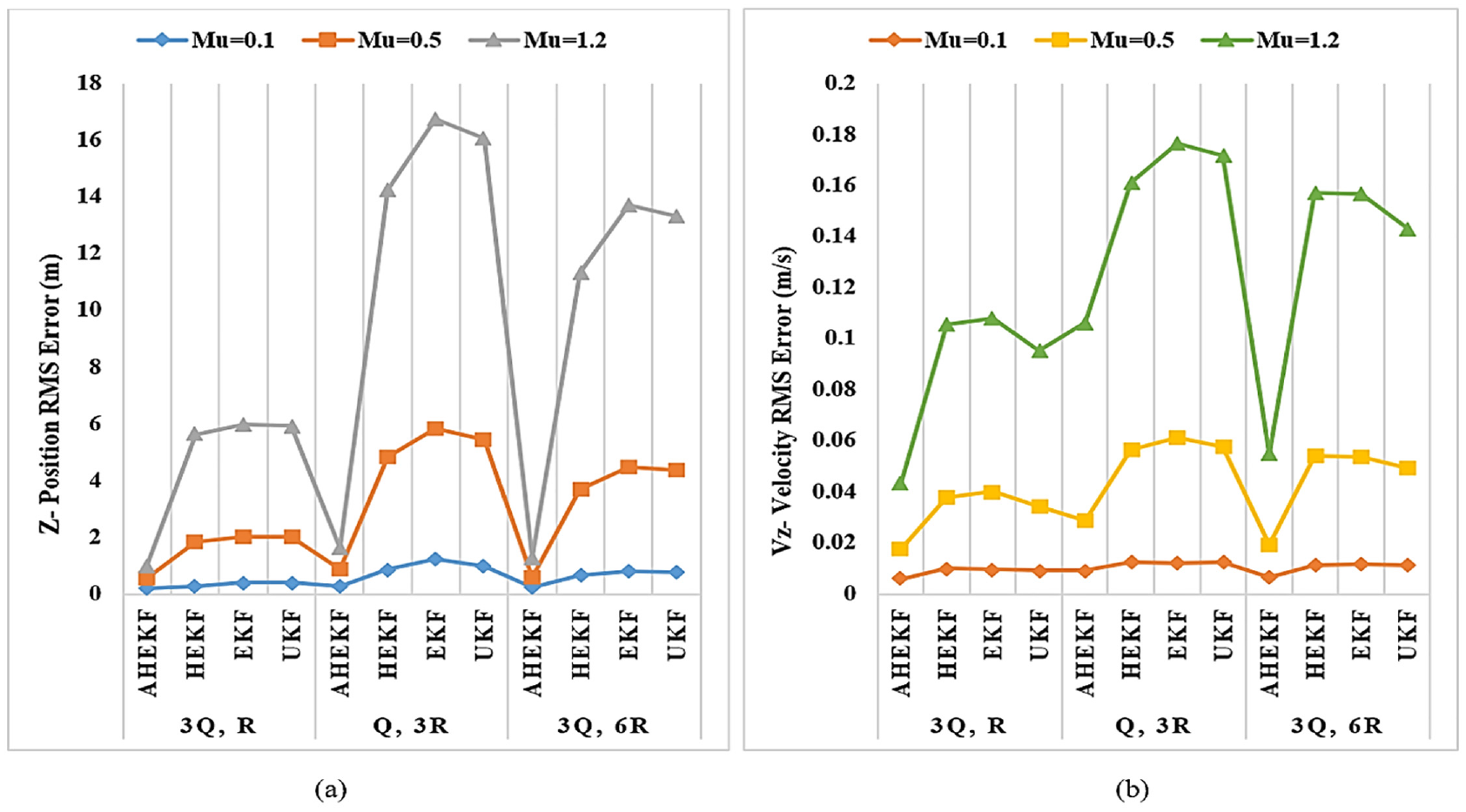
RMS errors comparison in Z-direction, when both non-zero means and high initial uncertainties are applied: (a): Z-Position, (b): Z-Velocity.
Scheme 4: Robustness against measurement outlier data
In this section, since the measurement matrix can be affected by disturbing data from environmental observations in the navigation system, an adaptive structure of the measurement covariance matrix
Therefore, the AHEKF was not affected as other procedures and maintained the lowest RMS errors which indicates that when we have both non-zero mean noise and high initial conditions, it is essential to adapt both weights
As discussed before, the measurement covariance matrix is adaptively tuned as depicted in equation (22), and disturbed or abnormal data will be bounded, which is based on residual covariance monitoring shown in equation (16). The forgetting factor
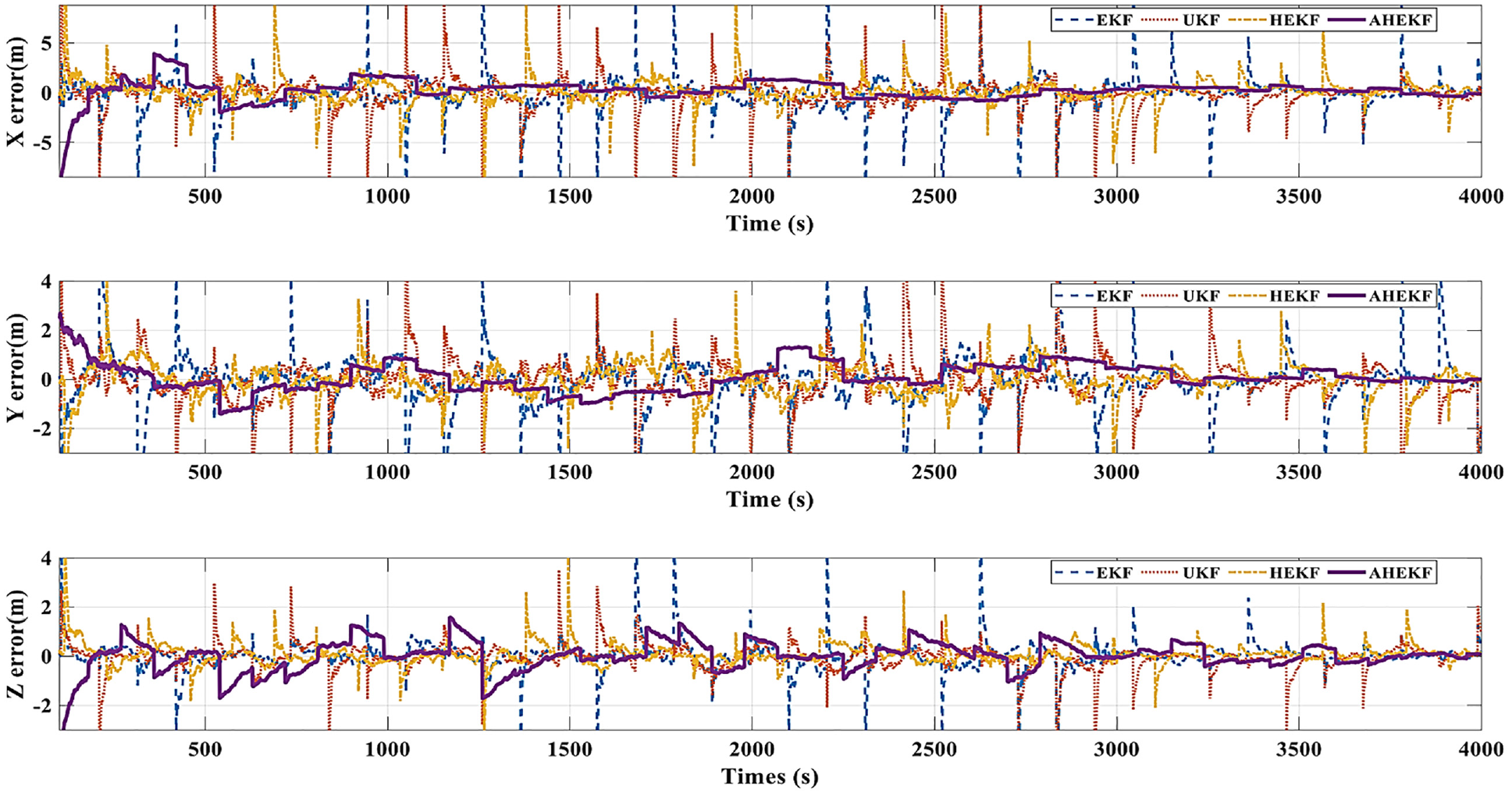
Position errors comparison against outlier measurement data.
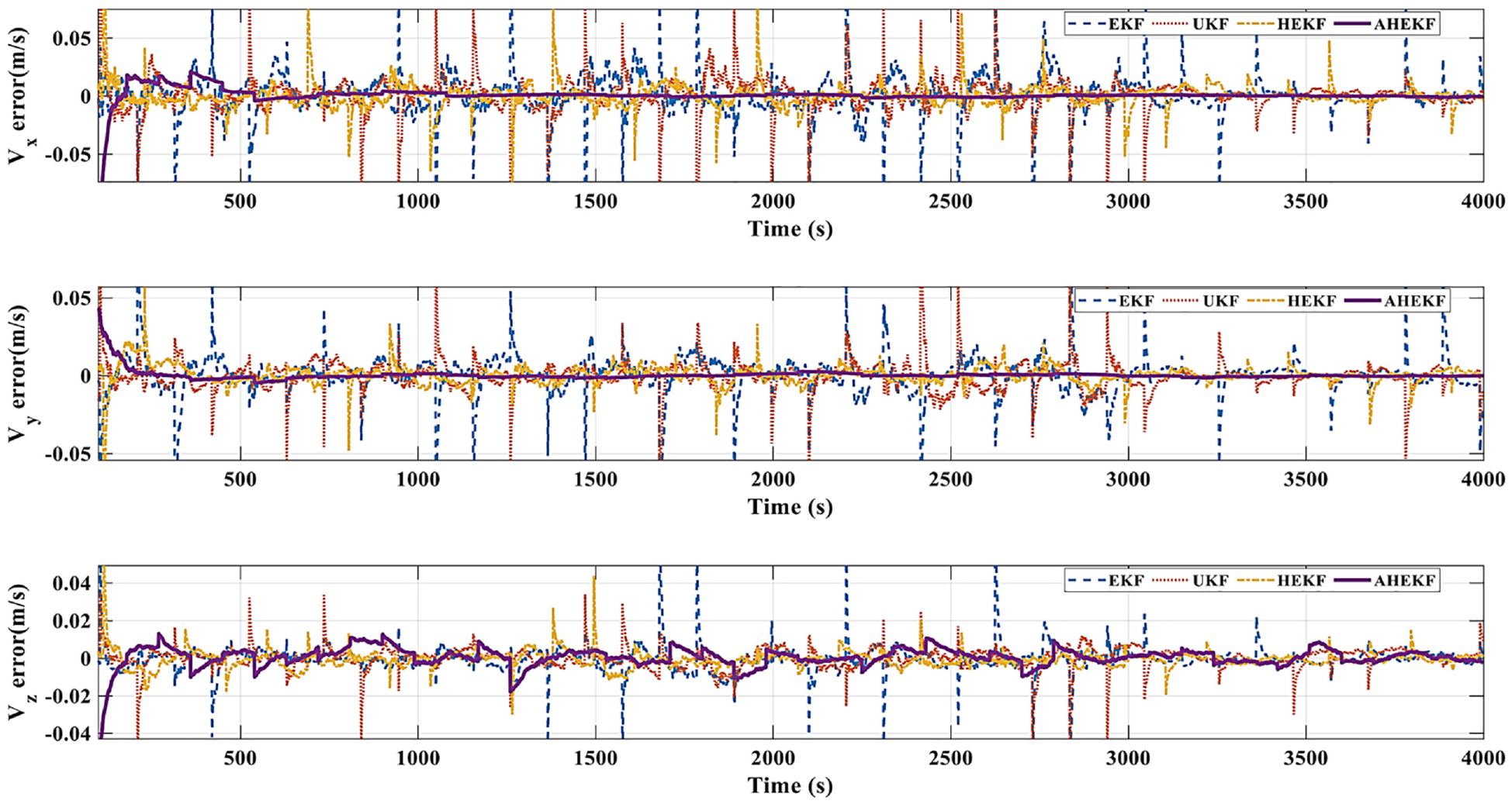
Velocity errors comparison against outlier measurement data.
Conclusion
Although the standard H-infinity filter does not require knowing the nature of the measurement and process noise, for optimal performance in the case of both robustness and accuracy, a novel AHEKF is proposed. The suggested approach can overcome high initial uncertainties, noise characteristics varying, and outlier data in the measurements. Subsequently, an adaptive scale factor is designed, balancing the robustness and accuracy of the filter. Also, in the case of the high value of the initial condition, process and measurement covariance weights are presumed to be adaptively and simultaneously tuned based on the innovation and residual vector, respectively, to achieve optimal performance as well. Finally, a judgment criterion is considered by upper and lower bound levels when the residual vector is contaminated by environmental disturbances. The proposed method is applied to fuse data of GPS and INS sensors, and to evaluate the proposed algorithm performance, four different schemes are presented. The simulation results demonstrated that the AHEKF’s performance was more effective than other compared filters in terms of the faster convergence rate of estimation errors with over 2.5 times improvement in comparison with HEKF, as well as, higher robustness, and higher accuracy, in which the maximum position error increment when applying the worst-case condition for AHEKF was only 16%, while for HEKF was 34%, for UKF was 67%, and for EKF was 70%.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
The authors confirm that the data supporting the findings of this study are available within the article.