
Abstract
In this paper, robust finite-time consensus of a group of nonlinear multi-agent systems in the presence of communication time delays is considered. In particular, appropriate delay-dependent strategies which are less conservative are suggested. Sufficient conditions for finite-time consensus in the presence of deterministic and stochastic disturbances are presented. The communication delays don’t need to be time invariant, uniform, symmetric, or even known. The only required condition is that all delays satisfy a known upper bound. The consensus algorithm is appropriate for agents with partial access to neighbor agents’ signals. The Lyapunov–Razumikhin theorem for finite-time convergence is used to prove the results. Simulation results on a group of mobile robot manipulators as the agents of the system are presented.
Keywords
Introduction
Distributed cooperative control of multi-agent systems has been extensively studied in recent decades due to its applicability in the real physical world. The applications include cooperation between robots (He et al., 2020), distributed estimation in sensor networks (Knotek et al., 2020), cyber physical systems (Zhang and Ye, 2020), and communication networks (Foerster et al., 2021). In these systems, local controllers provide an appropriate group behavior using information from neighbor agents. Among the different types of group coordination problems such as formation, flocking, coverage, and rendezvous, consensus is more inclusive and often is applied to other coordination schemes. The objective of consensus control is to achieve an agreement among agents’ states by designing local distributed controllers (see, for example, Shao et al., 2018; Shi et al., 2019, on the consensus of multi-agent systems).
In order to improve the performance of multi-agent systems, some significant challenges should be resolved. Some examples are the rate of convergence, the presence of time-delays in communications, and robustness issues.
In many physical systems, the transient performance of the system is important. It is appropriate that control objectives are achieved in a finite-time interval which is faster and more precise comparing to Lyapunov-sense stability. Consider a cooperative robotic system that fulfills several tasks from approaching and grasping a given object to some more complicated and precise tasks like minimally invasive robotic surgeries. In these applications, accomplishing the goal in finite-time is indispensable. A strategy giving finite settling time can be beneficial as it guarantees that the task has been performed faster and exactly as commanded (Denasi, 2015). The finite-time stabilization concept originates from optimal control problems for finite-time operation dynamical systems (Bhat and Bernstein, 2000). Some more recent work in this field include (Golestani et al., 2016; Oliva et al., 2017; Wu et al., 2016). Finite-time consensus tracking for a class of uncertain mechanical systems under switching topology is investigated in Cai and Xiang (2017).
In the above references, the problem of the presence of time-delays in communication between the agents has not been considered. However, many real practical systems are affected with time delays because of the finite speed information processing and transmission between agents and limited bandwidth of channels. Time delays often cause undesirable dynamic behaviors such as oscillation, performance degradation and instability in the system (Park et al., 2013). For instance, in a networked or tele-operated multi-agent system where agents communicate through a network suffering from communication delays, the whole stability of the system is influenced and one of the main tasks is to reduce the adverse effects. In Sakthivel et al. (2019), the problem of finite-time consensus of linear multi-agent systems with input delay by employing on-fragile control scheme under switching network topology is considered. Communication time-delays, disturbances, and nonlinear dynamics are not employed in their design.
Analysis of the consensus problems of networked manipulators operating on an under-actuated dynamic platform in the presence of communication delays is presented in Nguyen and Dankowicz (2017). Finite-time consensus in the presence of time-delays using an auxiliary approach based on an input to output framework is studied in Li et al. (2018). In our recent work by Sharifi and Yazdanpanah (2020), the finite-time consensus in the presence of time-delays was considered. However, the nature of delayed consensus is apparent in these works, and consensus between all agents does not happen synchronously, that is, the consensus error is defined as
There are also some few work considering finite-time stabilization of time-delayed linear systems (see Stojanovic et al., 2013; Zheng and Wang, 2019) but none of them are applied for control purposes in nonlinear multi-agent systems. For instance, in comparison with the study of Jiang et al. (2016), which provides a sliding mode solution that may cause undesired discontinuities in the control signal without any stochastic disturbance consideration, this paper provides a finite-time solution and considers broad ranges of deterministic and stochastic disturbances. In addition, this result is more promising, especially when the delays are long, which reduces the conservatism of the results. There is also a possibility to maximize the allowable upper bound of the delays by solving an optimization problem.
Another important factor in the performance of a multi-agent system is its robustness against uncertainties and disturbances. Generally, these can be categorized into two groups: deterministic and stochastic. Deterministic disturbances are caused by lack of full knowledge from the system dynamics or external signals and deteriorate the system performance. However, stochastic disturbances are often caused by the presence of noise in the measurements, stochastic couplings in the interconnected systems, and so on. Therefore, providing a method which handles these phenomena is indispensable. In Saboori and Khorasani (2014), the consensus problem with
In this paper, in order to confront the effects of time-delays and disturbances, two distributed robust control schemes are provided. One of them considers deterministic disturbances and the other takes into account the stochastic ones. There is no necessity for an agent to possess all the neighbor signals and only a part of them is sufficient under some conditions. Furthermore, there are no limitations on time-delays. They can be time-varying, non-uniform, non-symmetric, and even unknown but bounded. Establishment of consensus in multi-agent systems is much more difficult in a finite-time sense especially when there are delays in the transmissions. Because dynamics of the cooperative system in the presence of delays is more complicated, more restrictive conditions are needed for finite-time consensus.
The main contributions of this paper are threefold. (1) Design of new distributed control algorithms to guarantee finite-time robust consensus in the presence of communication time-delays and disturbances. Both deterministic and stochastic disturbances are considered and appropriate strategies are presented. In the case that deterministic disturbances are involved, an
The paper is organized as follows: In the first section, some preliminaries including a short description of graph theory and some relevant lemmas, problem statement, system description, and its properties are presented. After that,
Preliminaries
Communication graph (Cheng and Ugrinovskii, 2016)
A communication graph G is denoted by
The in-degree and out-degree of a node are the number of edges that this node is the termination and origination point for them, respectively. If the in-degree and out-degree are equal for all the nodes, the graph is balanced. Assume
Lemmas and definitions

where
System (1) is stable;
There exists

hold whenever
Furthermore, if




Model description
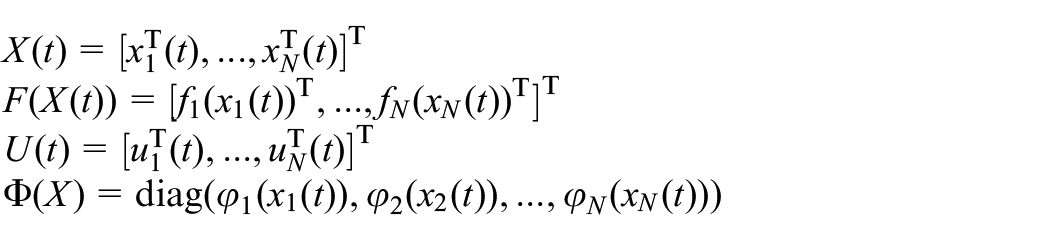
In this paper, the following class of nonlinear systems is considered for N agents of the multi-agent system

where
The following assumptions hold for system (4):
In this regard, we can present the complete dynamics of the multi-agent system as follows

where
consensus control
In this section, a
In this paper, the communication between agents could be through a connected undirected graph or a balanced strongly connected digraph. First, consider the consensus error vector for the multi-agent system as

where ⊗ denotes the Kronecker product and matrix M is consisting of the left eigenvectors of the Laplacian matrix of multi-agent system corresponding to N–1 nonzero eigenvalues. In other words, if the eigenvalues are arranged from smallest value, that is,

Note that the eigenvectors of the Laplacian matrix of an undirected graph which is symmetric, are perpendicular to each other. It is also known that the eigenvector corresponding to eigenvalue

where k is a real number. Thus, consensus condition will be achieved.
For the directed graph topology, consider
delay-dependent consensus algorithm
In this section, we provide a consensus algorithm in which the closed loop system is robust against the uncertainties. These uncertainties are either due to model mismatches in the agents’ dynamics or the presence of external disturbance signals. We consider a generalized model for the system with disturbances

where

in which,

In this section, the objective is to design a distributed control protocol for the agents of the system to achieve the consensus while preserving a desirable disturbance rejection performance. Consider the following consensus control algorithm for the multi-agent system of equation (7)
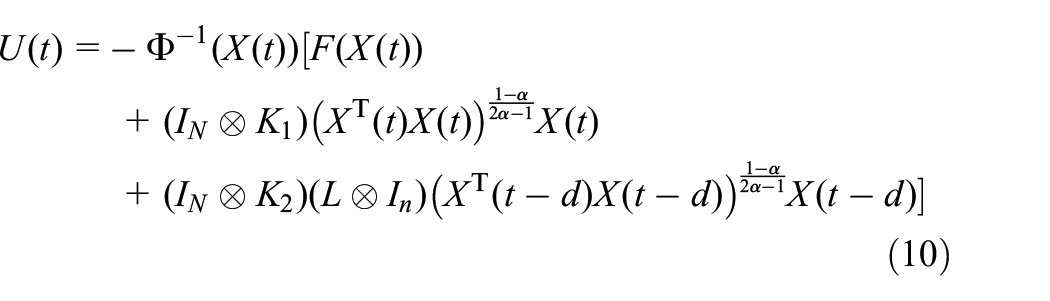
in which,
To establish the

The closed-loop multi-agent network with
For any non-zero

for
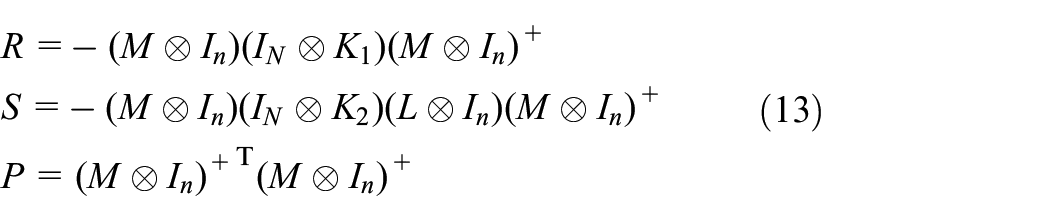
Consider the following definitions
in which,


Furthermore, the finite consensus time

where |·| defines the absolute value.

By taking the derivative of equation (18) one can reach

in which

Substitution of equation (10) in equation (20) gives
By replacing
Substituting equation (22) in equation (19) and utilizing the definitions in equation (13), one obtains
By using Lemma 2 for the third and fourth terms of equation (23), the following inequality is acquired
Finally,
Furthermore, equation (22) can be written as below by moving all terms to one side

Multiplying equation (26) by
Furthermore, due to Lemma 4, we get
where b is a positive real number.
In addition, utilizing Lemma 3 and meeting the required condition of Lemma 1, one obtains
Hence,
By adding the left side of equation (30) to the right side of equation (27), using equation (29) and rewriting the integral terms in quadratic form, we get
where

in which
We will prove the following inequality to establish the required robustness for the multi-agent system

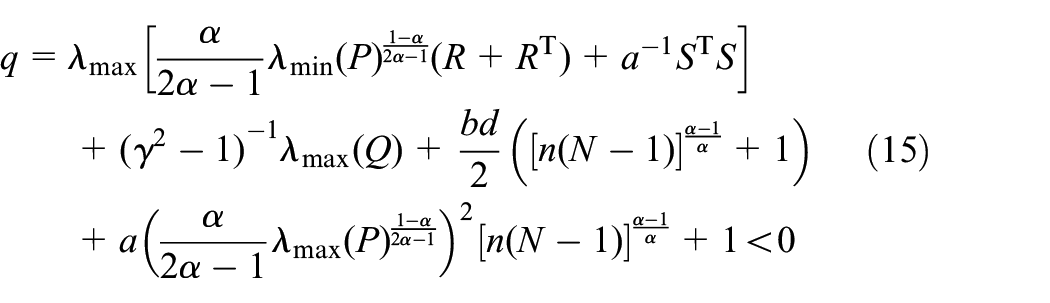
Substituting equation (31) in equation (33) and assuming all inequalities of equations (14)–(16) are satisfied, results in
The above inequality can be written as
therefore, we obtain

Using the state zero response and if equation (15) is satisfied, it is concluded that
where we employ a new control gain
Leader-follower finite-time consensus
If the agents are being determined to make consensus on tracking a specific path, the problem can be considered in a leader-follower topology in which, the leader agent has the accessibility to the tracking target and other agents’ goal is to track the leader in finite-time. Without loss of generality, consider the first agent as the leader. Therefore, the target tracking error for the leader can be considered as

in which,

where

In the above definition,
in which,
In addition, using equations (38) and (6),
After a few simplifications,
In the above expression,
where
and
By using the same Lyapunov function as equation (18) with the variable
From now on, the proof of Theorem 1 can be followed.
Finite-time stochastic consensus
In this section, a multi-agent system subject to stochastic disturbances is considered. Due to the random uncertainties such as stochastic forces on physical systems, noisy measurements, or stochastic couplings in the interconnected systems, this approach provides more applicability in real world. A complex network exhibits complicated dynamics which may be absolutely different from those of a single node. Since the whole multi-agent system becomes a coupled system influenced by stochastic perturbations, a stochastic differential equation should be considered for that, instead of a deterministic one. By finite-time stochastic consensus, we mean the expected value of the consensus error norm converges to zero in finite-time. Consider the stochastically perturbed model of the nonlinear multi-agent system as

where



Moreover, the finite consensus time


Substituting the control signal and getting the expectations of both sides, gives
Considering
where

and
Therefore, provided that the sufficient conditions in equations (44) and (45) are satisfied, finite-time convergence of
Simulation results
In this section, to evaluate the effectiveness of the presented approach, simulations are performed on a group of four identical nonholonomic mobile robots as the agents (Figure 1). The mobile robots consist of a vehicle with two driving wheels on the same axis and a front free wheel. The motion and orientation are achieved by independent actuators, such as dc motors, which provide the necessary torques to the rear wheels. The nonlinear dynamics of each robot in an n dimensional configuration space with coordinates

with
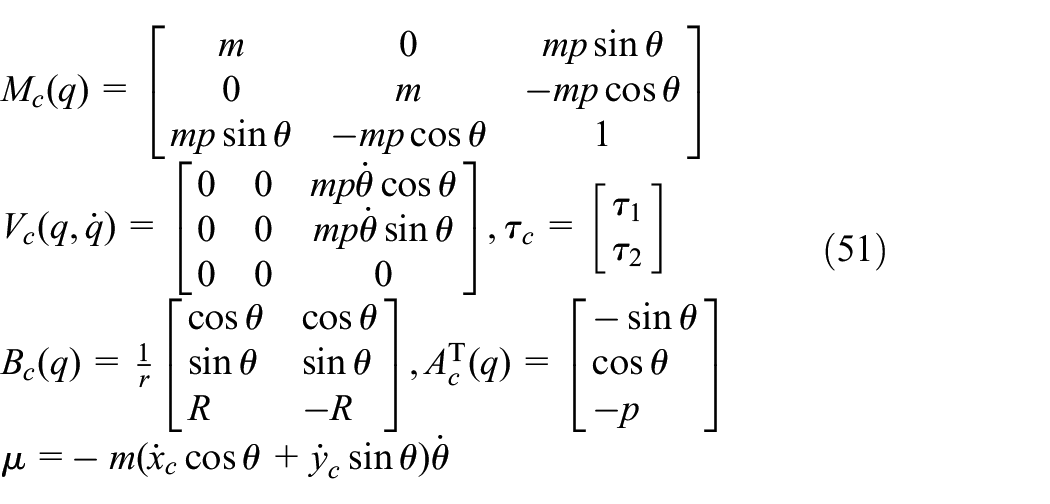
where
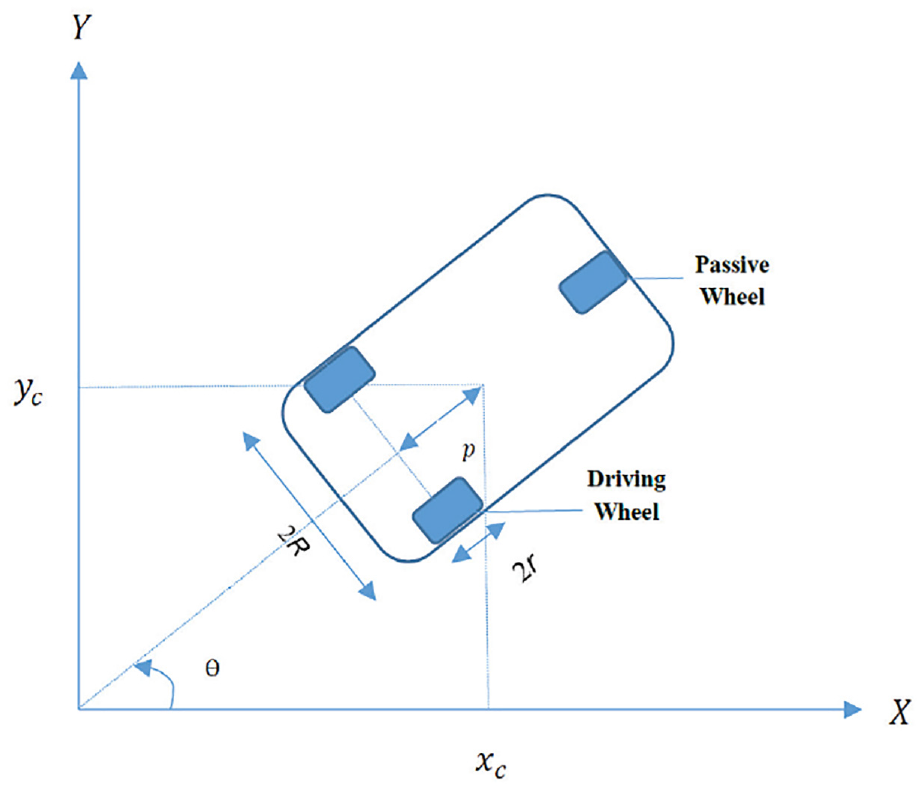
A nonholonomic mobile platform.
Furthermore, kinematic equality constraints can be expressed as

There is a full rank matrix

According to equations (52) and (53), a vector time function

The nonholonomic constraint states that the robot can only move in the direction normal to the axis of the driving wheels. If
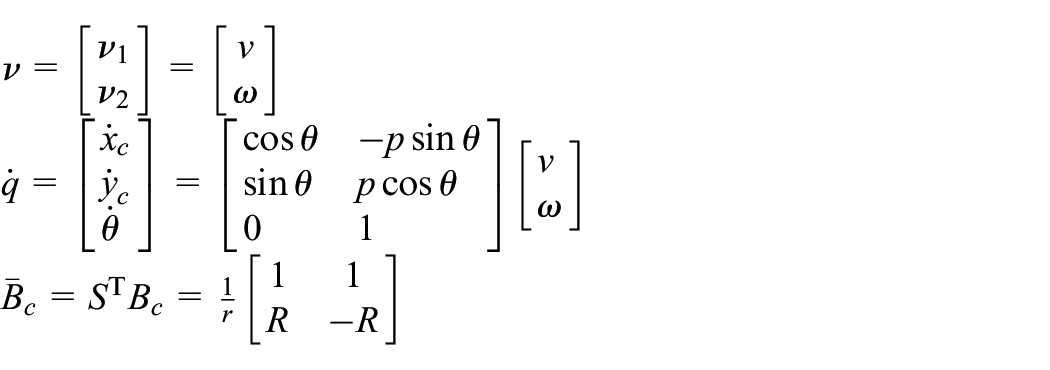

where
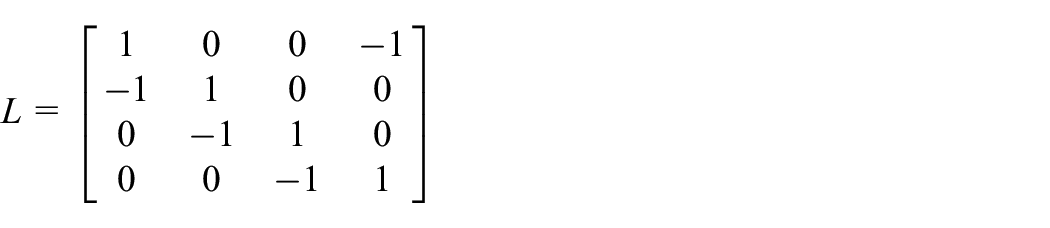
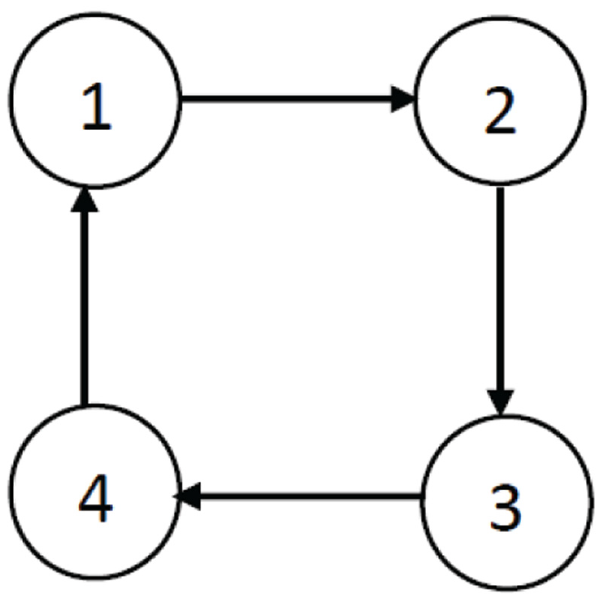
Directed communication graph.
In this regard, the eigenvalues of the Laplacian matrix and the resulting matrix M which has been used to construct the consensus error vector are as
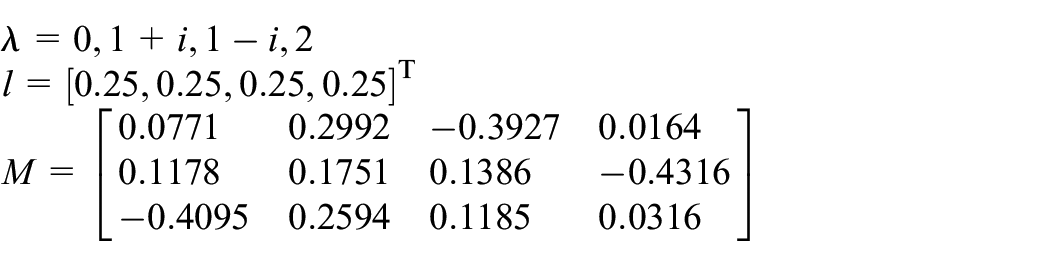
Therefore, it is concluded that
To obtain control signal parameters, the consensus conditions in equations (14)–(16) were solved as LMI using CVX toolbox. We choose
Figure 3 shows the results for two cases of leaderless and non-stationary targets in which the fourth agent has been chosen as the reference of consensus scheme and
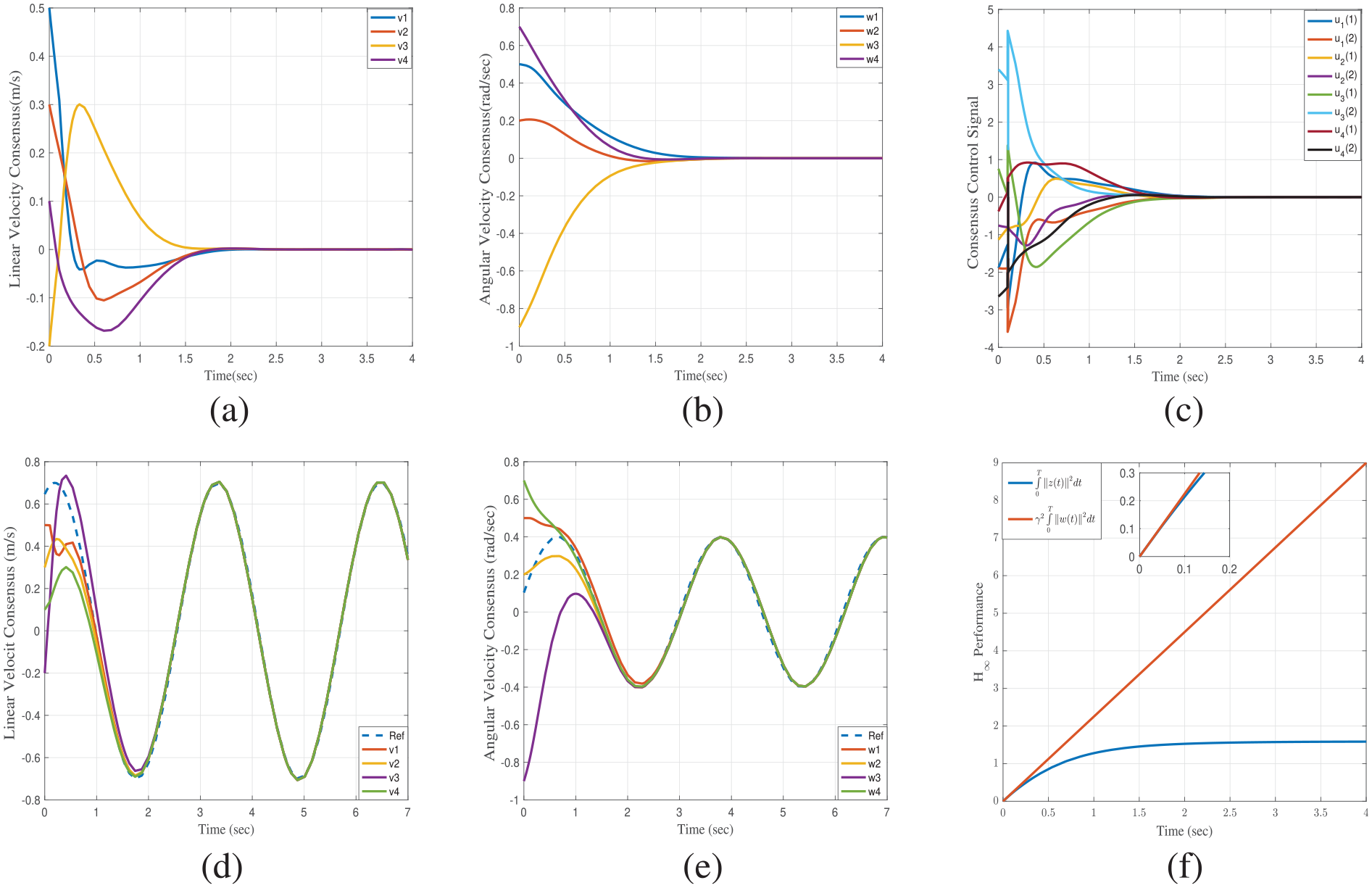
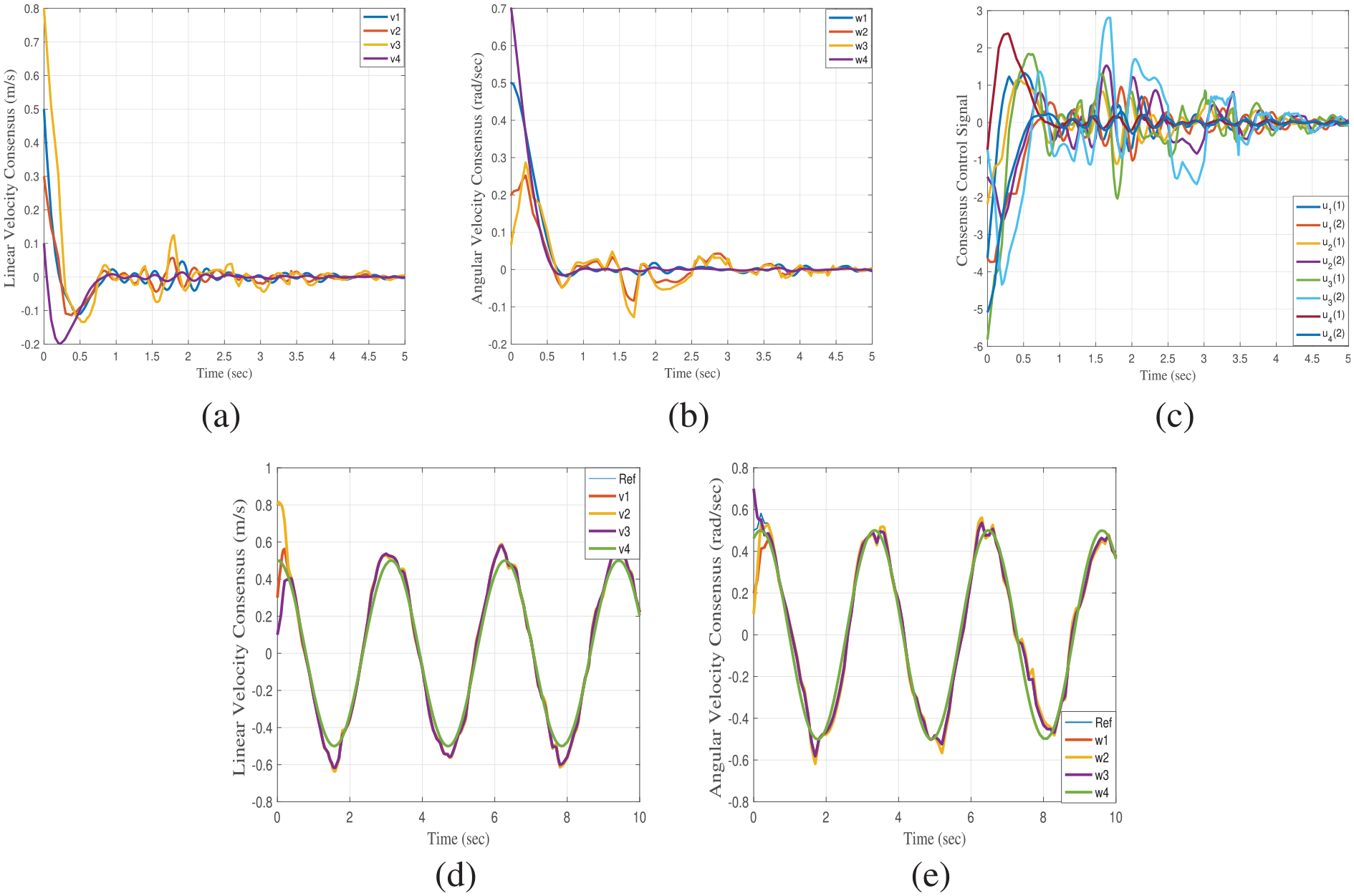
Stochastic finite-time consensus. (a) Consensus of linear velocities, (b) consensus of angular velocities, (c) consensus control signals, (d) non-stationary target consensus of linear velocities, and (e) non-stationary target consensus of angular velocities.
Conclusion
In this paper, the problem of robust finite-time consensus of a class of nonlinear systems in the presence of communication delays is considered. In order to compensate for the adverse effects of time-delays and uncertainties in a finite-time interval, novel delay-dependent consensus algorithms have been suggested. In this regard, deterministic and stochastic uncertainties are considered and appropriate strategies to come up with them are proposed. The algorithms can be used for cases with partial access of agents to their neighbor signals. In addition, there are no strong limitations on communication time-delays. Future works include the robust finite-time consensus strategy for time-varying graph topologies.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.