
Abstract
This paper studies model predictive control for a Takagi–Sugeno (T–S) fuzzy system with randomly occurring actuator saturation and packet losses. The nonlinearity of the actuator saturation is transformed into a set of convex hulls, while the packet losses are assumed to obey the rules of Bernoulli distribution. Both parallel-distributed-compensation (PDC) and non-parallel-distributed-compensation (non-PDC) strategies are adopted to design the controller for the system. In addition, sufficient conditions of the stability for the closed-loop system are given in terms of linear matrix inequalities. It is shown that the non-PDC strategy behaves less conservatively than the PDC strategy in controlling the considered T–S fuzzy system, when the input and output constraints are explicitly considered. Two simulation examples are provided to illustrate the effectiveness of the proposed design techniques.
Introduction
Over the past few decades, model predictive control, which features in solutions to constrained control problems, has been intensively studied. As one of the most popular advanced control theories, model predictive control predicts future system behaviour and selects optimal control sequences based on an explicit model and an objective function (Cole et al., 2014; Corbin et al., 2013; Wu, 2015). So far, model predictive control technology has been utilized in many application areas, such as processing industries, where plants are sufficiently slow to implement operations (Chai et al., 2013; Forbes et al., 2015; O’Brien et al., 2011). Moreover, to eliminate geographical restrictions and meet the increasingly demanding requirements in complex control industries, model predictive control technology can now be commonly found in network control systems.
Network control systems have attracted great attention in both practical applications and theoretical research in the past decades, since they have huge advantages over traditional point-to-point control systems, such as simplification of maintenance and installation or reduction in the cost of the cables and power (Heemels et al., 2010; Wang and Lemmon MD, 2011; Yue et al., 2013).
However, there still exist new challenges, owing to unreliable networked transmissions (Chen et al., 2010; Donkers et al., 2011; Heemels et al., 2013). New approaches for network control systems should be proposed to eliminate poor performance caused by the undesired networked environment, for instance, packet losses (Ding, 2011; Xu et al., 2012; Zhang and Tian, 2010), time delay (Garcia and Antsaklis, 2013; Song et al., 2011) and quantized signals (Coutinho et al., 2010; Liu et al., 2015; Yang et al., 2011). Packet losses, as the main issue to be discussed in this paper, have turned out to be a hot topic, with unsolved challenges in the network control system. Xiong and Lam (2007) addressed the stabilization problem of network control systems with bounded packet losses and Markov packet losses, and established stability conditions for both types of packet loss. By modelling the packet losses as a Bernoulli process, Sahebsara et al. (2007) presented a control strategy for a discrete-time network control system, considering the problem of optimal filtering for discrete-time systems with random sensor delay, multiple packet losses and uncertain observation. Zhang et al. (2012) considered the estimation problem over networks with packet losses. The estimator was presented by solving a deterministic Riccati equation, which shows that it has a smaller error covariance and wider applications.
Some interesting results were presented in the aforementioned documents. However, all of the results were obtained under the assumption that the controlled plants were linear systems. However, most systems are complex and nonlinear in actual industrial production; hence, more attention should be paid to the design of nonlinear networked controllers and it is urgently necessary to study the relevant results further. In the field of nonlinear control systems, fuzzy control has aroused great attention, especially for the T–S fuzzy model, which is an effective solution to narrow the gap between the fruitful linear control systems and complex nonlinear fuzzy control ones (Bouyahya et al., 2013; Lu and Shih, 2010; Ren et al., 2014).
Saturation is one of the most common factors to deteriorate system performance in engineering (Mahjoub et al., 2014;Wen et al., 2011; Zhao et al., 2016, Song et al., 2014); owing to the limitation of the communication bandwidth, large information-carrying packets might be randomly saturated or lost while being transmitted, with only a small number of packets being transmitted successfully to the actuator. The problem of saturation and packet loss at the actuator node are highly likely to occur. Therefore, it is essential to take both issues into account. Most recently, we are delighted to see that there are nice works addressing packet loss and the input saturation problem of robust stabilization for T–S fuzzy discrete systems (Kaleybar and Esfanjani, 2014; Zhao and Li, 2015; Zhou and Zhang, 2012). Kaleybar and Esfanjani (2014) investigated a linear network control system subject to input saturation and packet losses. Two methods have been presented to synthesize a stabilizing controller for the considered control system. The output feedback control problem was studied for networked discrete-time systems with actuator saturation and packet losses by Zhou and Zhang (2012), who proposed an output feedback controller that is dependent on both saturation and packet loss. Zhao and Li (2015) studied the problem of robust stabilization of T–S fuzzy discrete systems with actuator saturation. By using a parameter-dependent Lyapunov function, both parallel-distributed-compensation (PDC) and non-PDC strategies were designed. All these works gave us good ideas.
However, unlike these works, we would like to emphasize that the contribution of this paper is not just a simple comparison between the PDC and the non-PDC strategy. In fact, compared with the existing literature, the main contribution of this paper is that we consider the synthesis approach of model predictive control for network control systems with randomly occurring actuator saturation and packet losses. For model predictive control, the synthesis approach means that the closed-loop system is stable once the optimization problem is feasible at the initial time. Although there are many nice papers considering the design of model predictive control for network control systems, only a limited number of works have been found on the synthesis approach of model predictive control. The main difficulty in extending the synthesis approach of model predictive control to the networked environment is guaranteeing closed-loop stability. For non-networked model predictive control, closed-loop stability can be guaranteed by imposing appropriate constraints on the optimization problem. However, when communication networks are taken into consideration, these constraints do not maintain the desired closed-loop stability. Hence, the feature of this paper is that we provide a new solution to the synthesis approach of model predictive control for network control systems, which has not, to our knowledge, yet appeared in the literature.
Notation
I is the identity matrix, with appropriate dimensions. For any vector x and matrix W,
Problem statement
Fuzzy model
The structure of a fuzzy network control system with randomly occurring actuator saturation and packet losses is presented in Figure 1.
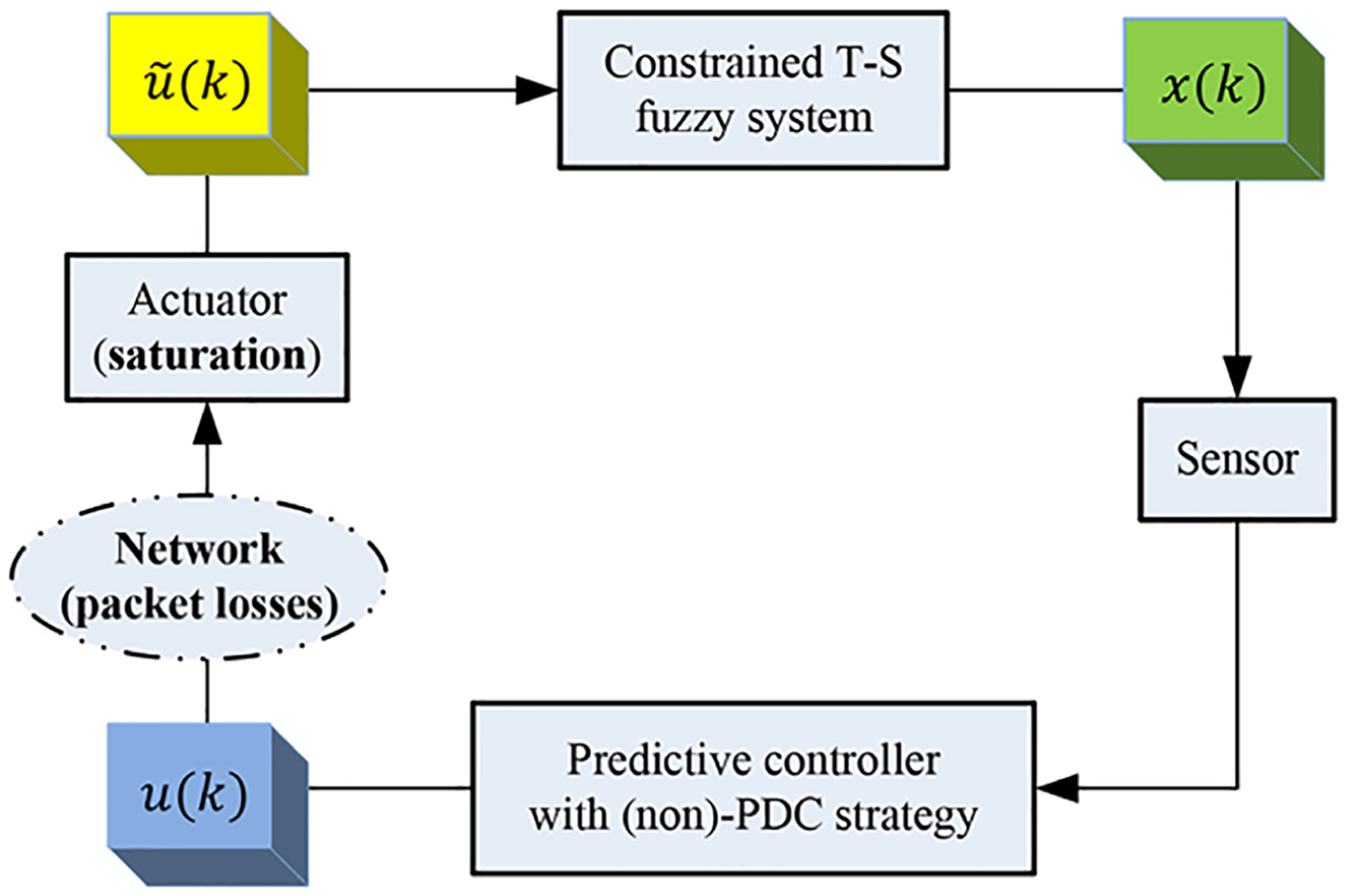
Structure of the fuzzy network control system.PDC: parallel distributed compensation.
The fuzzy system is supposed to be represented by the following discrete-time nonlinear model, in which the jth rule is provided as follows.
Plant rule j. If


where
By utilizing fuzzy blending, the model of the fuzzy system can be expressed as


where
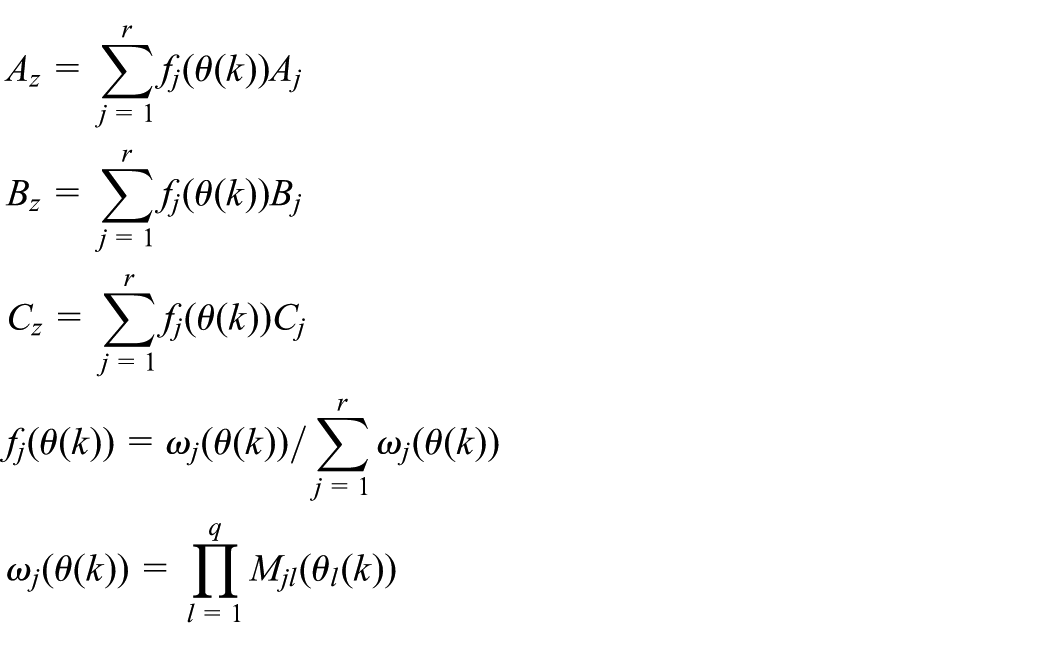
where
Actuator saturation and packet losses
Next, consider the fuzzy system with saturated input

where

Before proceeding, the following definitions and lemmas are provided to deal with the main issues of the random actuator saturation and Bernoulli packet losses in later sections.


where F is the feedback gain to be designed. Let
Owing to the limitation of the communication bandwidth, the large information-carrying packets might be randomly saturated or lost while being transmitted; only a small number of packets can be successfully transmitted to the actuator. The problem of actuator saturation and packet losses is highly likely to appear. Therefore, it is essential to take both issues into account. By considering Bernoulli packet losses, the control input

To analyse the control system conveniently, we introduce the random variables


where
If
If
If
Finally, considering both the random actuator saturation and Bernoulli packet losses, the system model can be presented as


Model predictive control optimization
Let us consider the formulated model predictive control problem
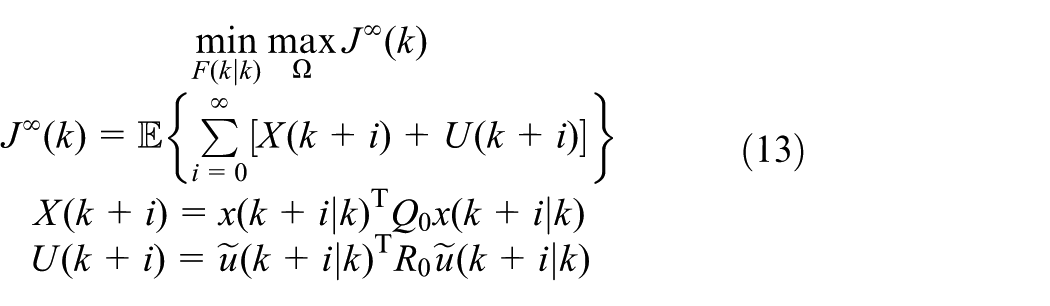
where
The input and output constraints are


where
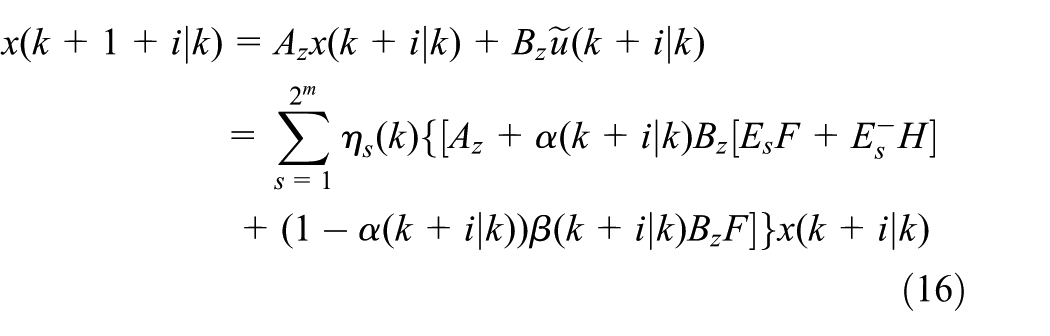
By taking equations (11) and (12) as the predictive model, we can obtain the predictive states at the future sampling time as

To derive an upper bound of
Furthermore,

where
Summing equation (19) from
Let us define

Thus the min-max optimization problem for the proposed model predictive control can be developed as equation (21), which gives an upper bound on
Main results
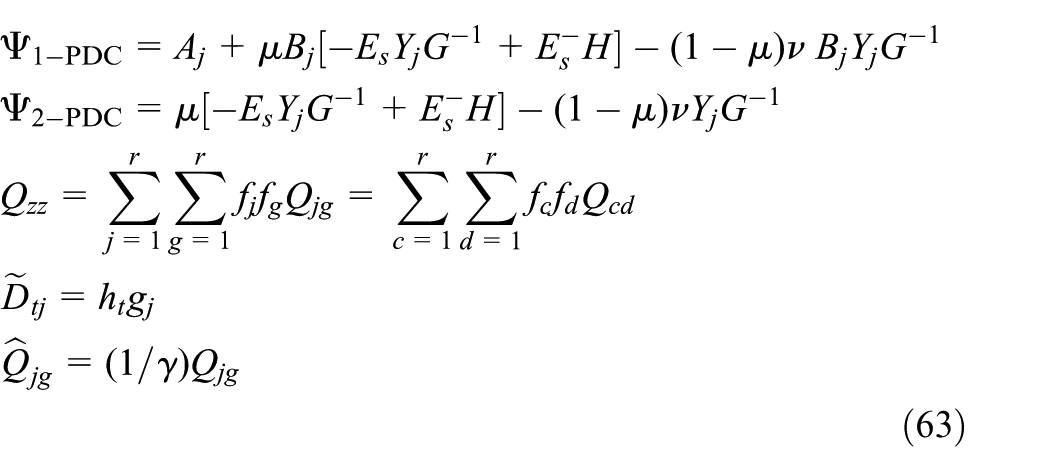
Non-parallel distributed compensation
In this section, the non-PDC strategy will be utilized for the fuzzy model predictive control problem. For the considered fuzzy system (equation (16)), the non-PDC state-feedback fuzzy control strategy is given as
By defining
and considering equation (8), we can obtain the closed-loop system



where
then the Lyapunov function can be taken as

Pre- and post-multiply

Then we can get
It should be noticed that

then based on the Schur’s complement, equation (26) can be obtained.
Based on Schur’s complement, equation (21), which is equivalent to

The stability of the presented system is guaranteed by equation (19); by computing the mathematical expectation of both sides, it can be rewritten as
After pre- and post-multiplying by
therefore equation (33) can be unfolded as
Thus, based on equation (31) and the Schur’s complement, equation (34) can be transformed into the following linear matrix inequalities
That completes the proof.
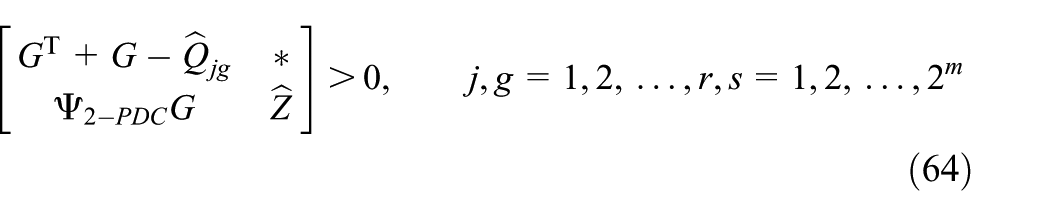
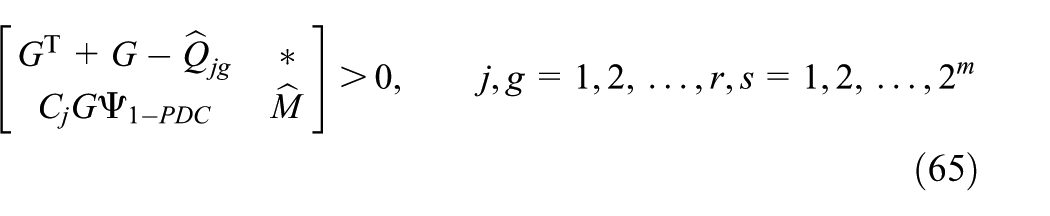
Constraints handling

with

with
Based on equations (9) and (10), obviously, equation (38) can be rewritten as

Since

After pre- and post-multiplying by
Thus, the constraint of the input holds if equation (36) is satisfied.
With the non-PDC strategy obtained at sampling time k, we have
Similarly, one can obtain
Using Schur’s complement and the fact that

Hence, by increasing
Feasibility

Recursive feasibility
It can be known that the constrained model predictive control optimization problem is feasible at the sampling time k. Assume that the optimal solutions at k are

where ‘+’ is the next sampling time, which means
According to Theorem 1, an upper bound of

After pre- and post-multiplying this inequality by

It should be noted that
where

Certainly,
Closed-loop stability
We assume that

where
As mentioned in equations (19) and (51), we obtain

Computing the mathematical expectation of both sides of equation (52), and for any
considering
where
That completes the proof.
Parallel distributed compensation
In this section, the PDC strategy for a fuzzy system with random actuator saturation and packet losses is adopted:
Plant rule j: IF

Therefore,
Thus, the closed-loop fuzzy system under the PDC strategy can be obtained as
In the following, the infinite-horizon model predictive control problem for fuzzy system with PDC strategy will be presented.


where
then the Lyapunov function can be taken as
with
Illustrative examples
In this section, we present two simulations to illustrate the method developed in this paper.
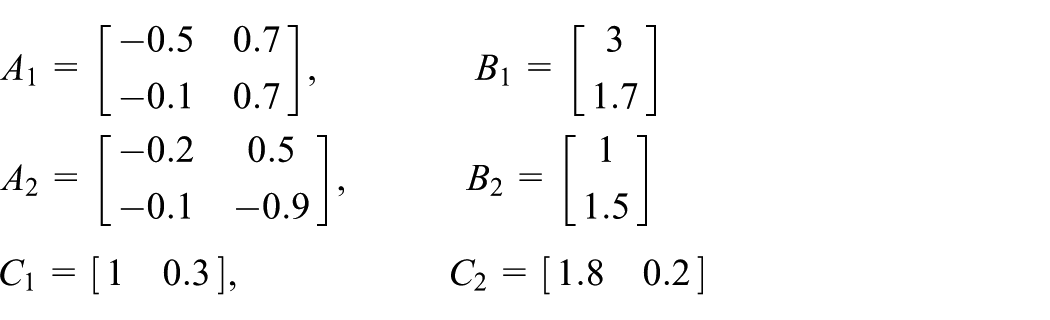
Example 1
The considered fuzzy system with actuator saturation and packet losses is described as follows.


The membership functions have the forms

where the system matrices are presented by the following vertices
A comparison of the different strategies is presented in Table 1.
Comparison of different strategies.
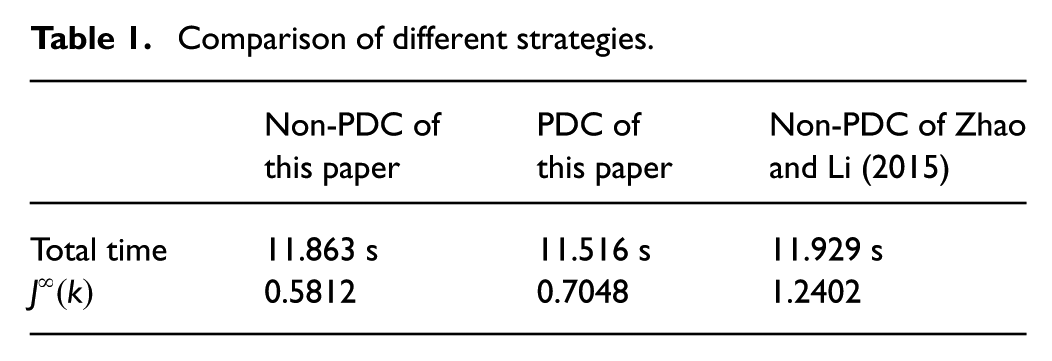
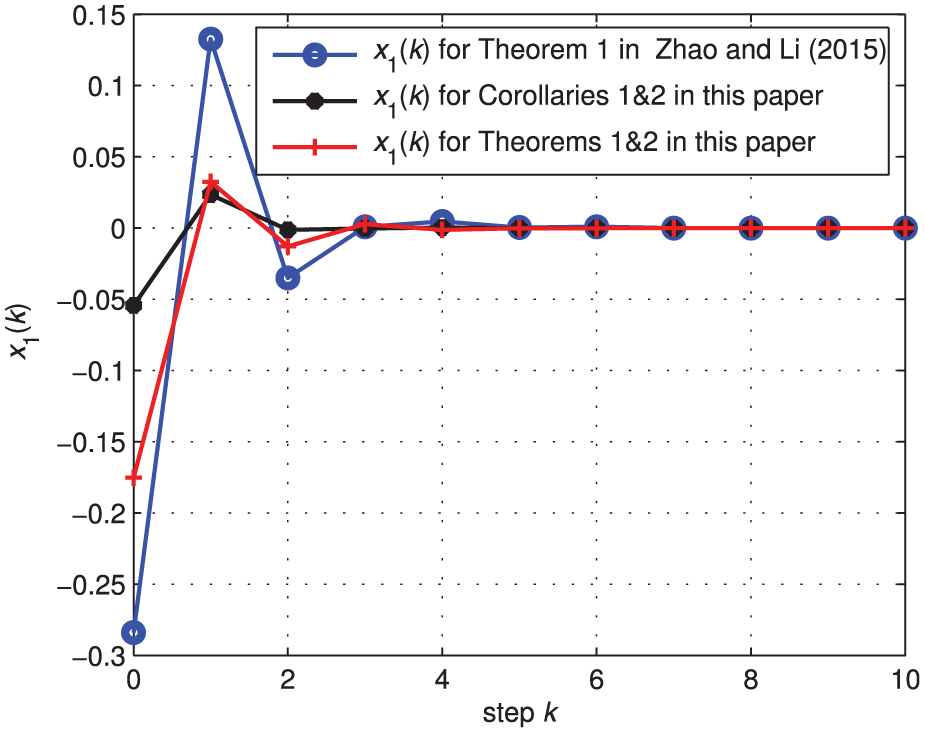
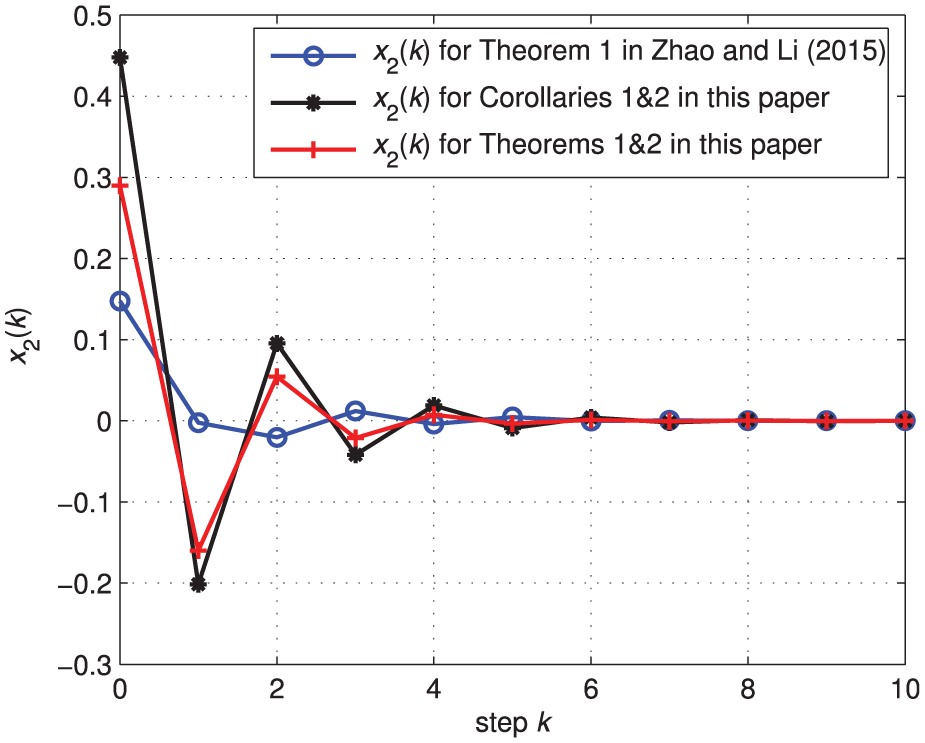
We have given a comparison between the non-PDC strategy (Theorems 1 and 2) and PDC strategy (Corollaries 1 and 2) proposed in this paper and the non-PDC strategy (Theorem 1) proposed in Zhao and Li (2015). For the non-PDC strategy, the states of the control system are given in Figures 2 and 3 and the evolution of
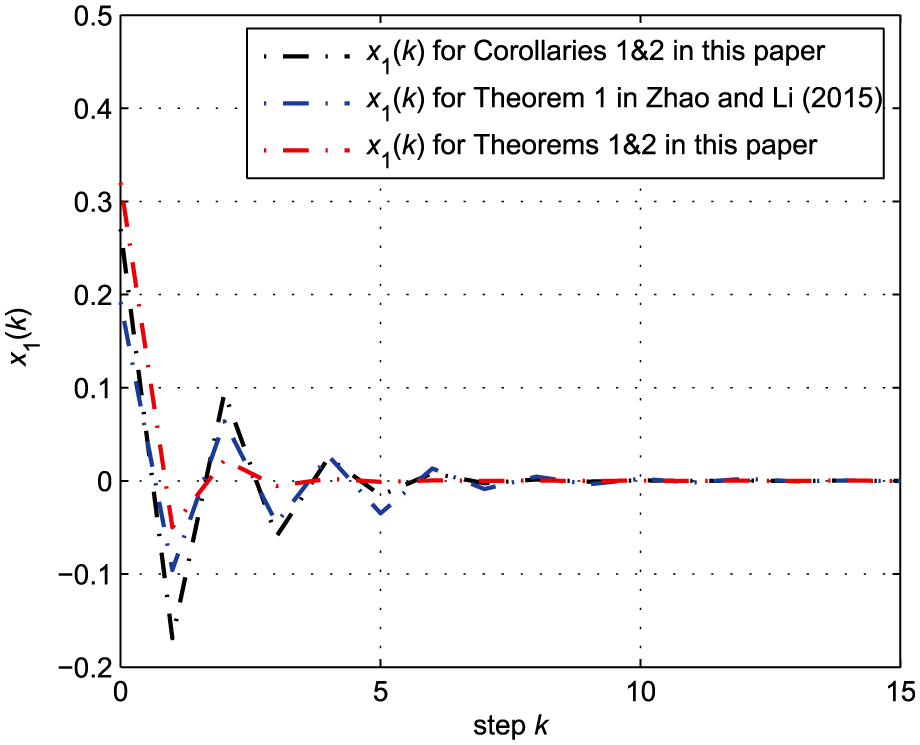
State
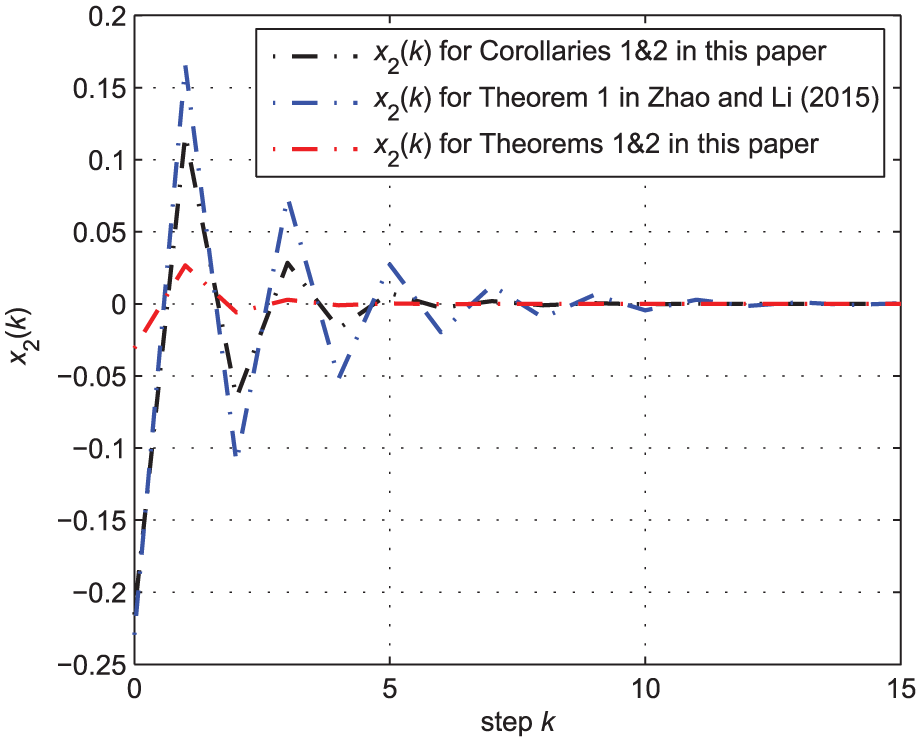
State
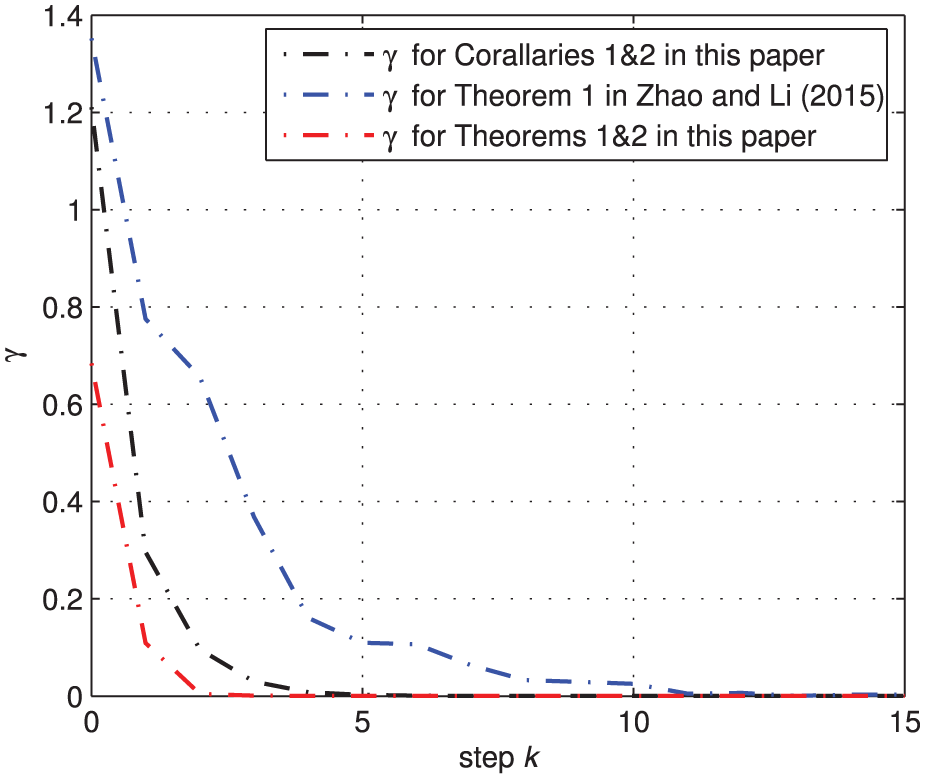
Evolution of
Example 2
Consider an inverted pendulum controlled by a direct-current motor, as shown in Figure 5. Its discrete-time model is presented as

where
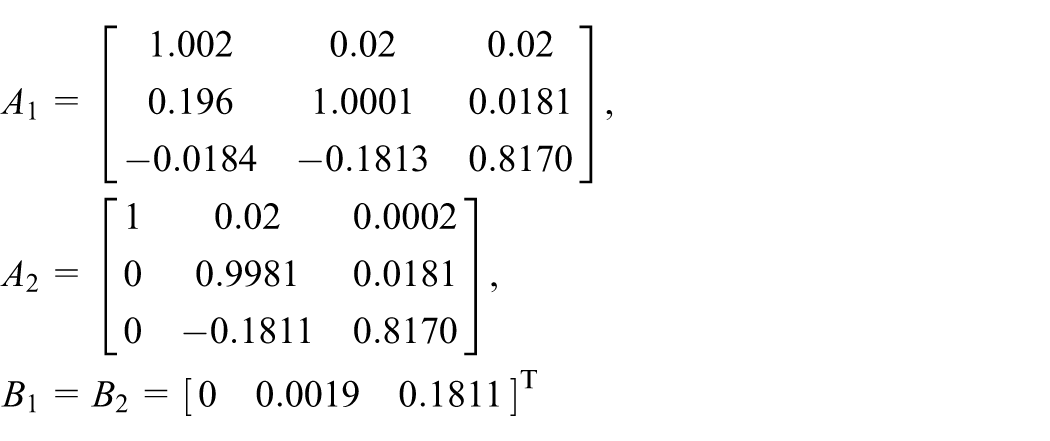
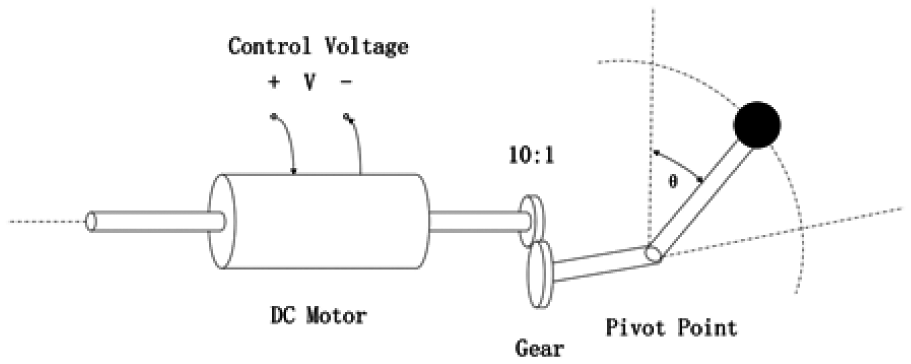
Inverted pendulum controlled by a direct-current (DC) motor.
To demonstrate the effectiveness of the obtained results, we assume the membership function at the plant and controller side to be

Different states for the fuzzy control system are given in Figures 6, 7, 8 and 9, from which it can be seen that different strategies give different performances. The proposed non-PDC strategy is less conservative than the PDC strategy, and the proposed PDC strategy behaves better than the non-PDC one given in Zhao and Li (2015).
State
State
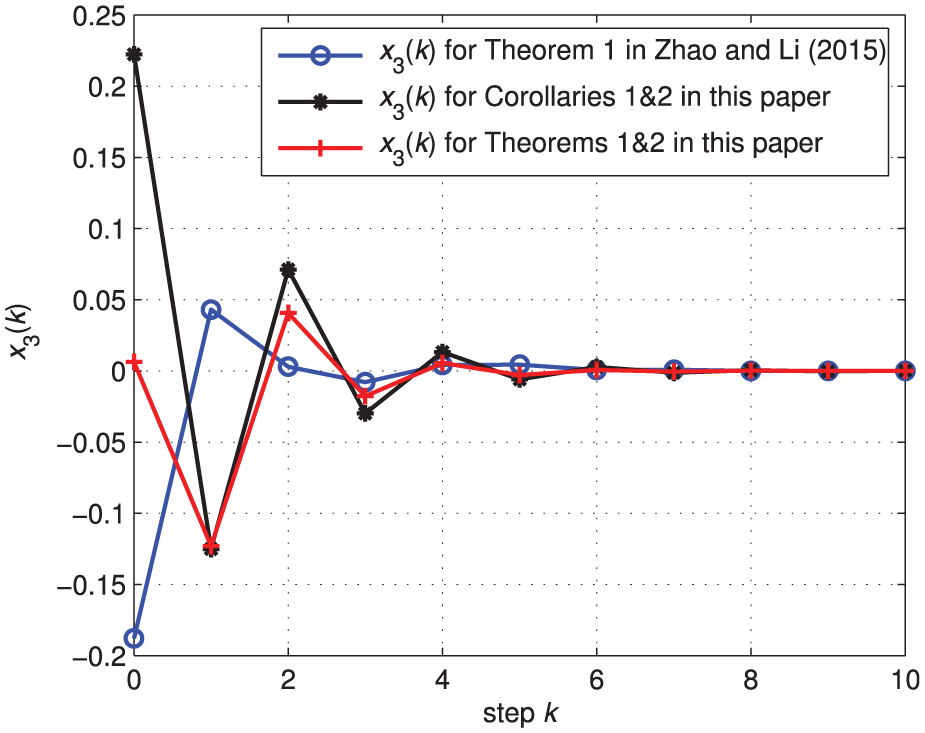
State
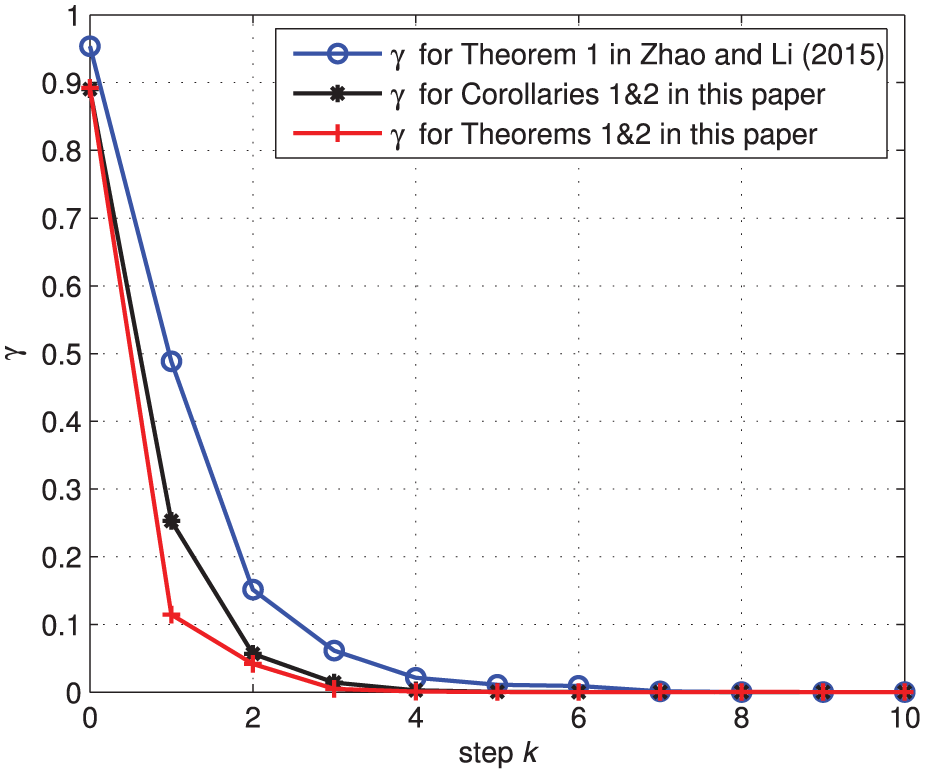
Evolution of
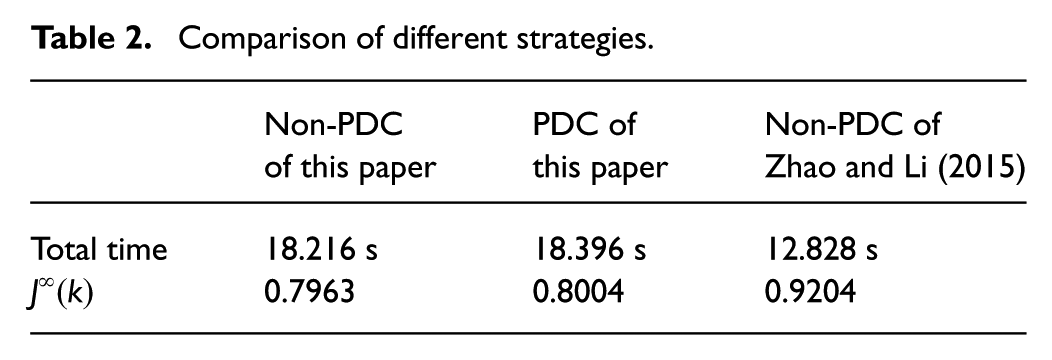
A comparison of the different strategies is presented in Table 2.
Comparison of different strategies.
Conclusion
This paper presents a study of model predictive control for a fuzzy system with randomly occurring actuator saturation and packet losses. Two sets of Bernoulli sequences are introduced to express randomly occurring actuator saturation and packet losses. An online model predictive controller is obtained by solving an infinite-horizon optimization problem online, which explicitly considers the actuator saturation and packet losses. Based on the solution of the model predictive control optimization problem, we provided state-feedback controllers using both PDC and non-PDC strategies; our results show that the non-PDC strategy leads to less conservatism than applying does the PDC strategy. Moreover, the proposed controllers meet the restriction of the input and output. In addition, results show that there is a faster convergence when using the non-PDC strategy than when using the PDC strategy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflict of interests with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant number 61403055), the Research Project of Chongqing Science and Technology Commission (cstc2018jcyjAX0691), the Scientific and Technological Research Program of Chongqing Municipal Education Commission (KJQN201800645, KJ1500437), Chongqing Postgraduate Research and Innovation Project (grant number CYS16163).