
Abstract
Mine development or construction projects should be carefully scheduled to meet the project objectives in terms of duration, budget, and scope since they include many highly time- and cost-sensitive activities. The inherent complexity in mining operations, coupled with material, equipment, and resource availabilities, commodity price cyclicality, and market trend uncertainties, can lead to a high risk to the project, resulting in schedule and cost overruns. Therefore, these projects must be planned and controlled efficiently to ensure that the required capital investment does not exceed the project budget and the project deadline is met. This paper proposes a simulation-based model to optimize the trade-off between time and cost of project planning problems under uncertainty. In doing so, equally probable realizations are generated considering different project duration crashing scenarios to quantify the impact of uncertainty on the total project cost and project completion time, and risks are assessed. A numerical example is provided to show the performance of the proposed approach through an underground mine development project. Statistical analysis of the results obtained from the developed simulation model identifies the risk of project completion time, the criticality of activities, and bottleneck activities of the project. In addition, the time–cost trade-off is achieved under the project deadline and budget constraints by implementing 20,736 different crashing scenarios. Finally, the results obtained from the developed formulation are compared with those obtained from the linear programming solution. The proposed approach has a strong potential to add value to project management of mining projects.
Keywords
1. Introduction
Project management is the process of using specific techniques, skills, and knowledge to achieve the preconcerted project goals under constraints regarding budget, time, and scope. 1 Due to globalization and technological advances, the dynamics determining project cost, control, and time have diversified significantly. The available technology, workforce, and tools vary considerably. As a result of these variations, the value-creating potential coupled with project management becomes more prominent. Various industries such as construction, engineering, healthcare, and information technology strive to develop more practical techniques for planning, organizing, managing, and controlling a project to add value to the projects.2,3
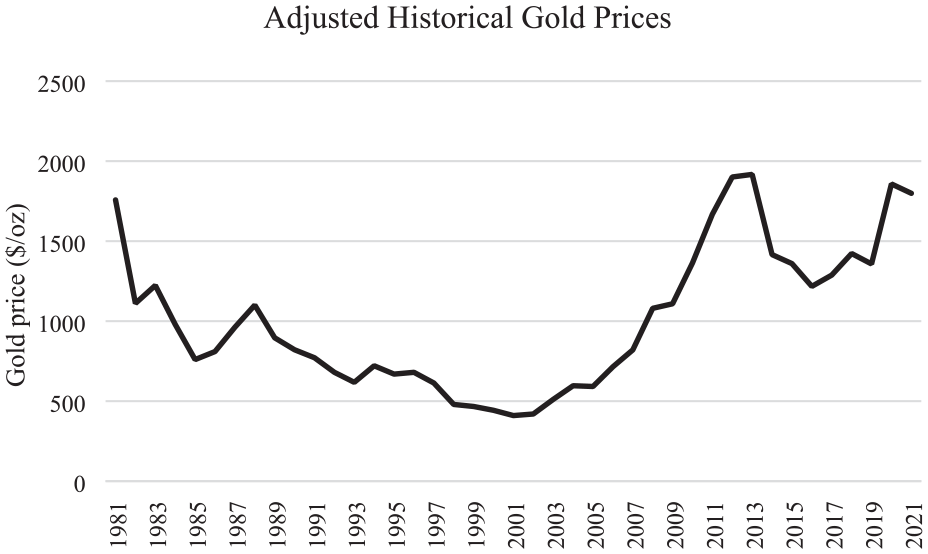
Mine construction projects are large-scale engineering projects where effective coordination among numerous activities performed by different organizational units is required. These projects are inherently complex and uncertain due to the influence of internal and external factors, including procurement, market trends, and commodity price cyclicality.4,5 The completion time of a mine construction project is highly sensitive to the commodity price cyclicity emerging from supply–demand imbalance.6,7 The price cycles are described by boom-bust episodes indicating repeated expansion and recession periods of commodity prices.8,9 Typical commodity price cycles are represented in Figure 1. The gold prices are quoted from the London Bullion Market Association (LBMA).
Producer price index by commodity: all commodities, percent change, annual.
Suppose a project scheduled for completion at the end of a period of commodity price stagnation (or recession) is extended into an expansionary period due to delays. In this case, there could be significant negative consequences for project value. Projects in cyclical sectors, including mining, are sensitive to completion time. Therefore, these price cycles should be taken into account during the project planning phase to ensure that the company remains competitive in the market and is protected from excessive losses. 7 In this regard, project duration is a critical parameter for determining the economic risk of a mine construction project. In line with the diversification of available technologies and tools, managing capital expenditures is also becoming a key issue. Where there is a trade-off between time and cost, mining project management should pay special attention to managing this trade-off.
Project management involves three major phases: planning, scheduling, and controlling. Planning covers defining the project scope and objectives, developing a list of the major tasks and project schedule, and anticipating the uncertainties that may increase the project risk in terms of delays. Scheduling includes sequencing tasks and allotting time and cost to them, identifying their interrelations, and their parameters affecting project goals. Controlling is the process of monitoring progress, deadlines, and budget and modifying the plan when necessary. 10 Network analysis has widely been implemented to address them to achieve effective planning, scheduling, and control of projects. The most commonly used network-based project management methods are the critical path method (CPM) and the Project Evaluation and Review Technique (PERT), developed in the late 1950s.11,12 They are powerful techniques to calculate the shortest completion time, the identification of the critical activities which affect the project duration, and evaluate the effect of changes on the project duration and project cost.3,13 These techniques can also be associated with the project crashing method in a way that the duration of one or more of the critical activities of a project is reduced by allocating more resources such as labor, equipment, and material. Since the additional resources increase the project cost, project crashing must be carried out based on a trade-off analysis between project cost and project completion time. This concept is often referred to as “time-cost trade-off” (TCT) project planning. 14 CPM-based project planning is a deterministic approach that cannot deal with uncertainties combined with duration and cost activities. However, the durations and costs of project activities involve uncertainties related to weather, equipment, operations, human resources, and dynamics, depending on the interrelationships between the internal and external elements of the project. On the contrary, PERT is an uncertainty-based technique that builds on a probability distribution using three parameters, namely, minimum, maximum, and most likely (mode), to estimate the most probable operation times and costs. 15 The PERT, relying on three parameters, has also shortcomings since it may not always accurately capture the true uncertainty associated with an activity, resulting in an underestimation of the expected duration and cost of the project.16,17 Therefore, traditional PERT/CPM methods provide static project plans which may fail to deliver the actual project behavior and a concise depiction of its structure, leading to cost and schedule overruns.
To overcome the limitations of traditional methods and achieve a trade-off between the operation time and cost of the project under uncertainty, the TCT project management problems have been extensively studied by various heuristic and analytical methods in the literature. Siemens 18 studied a heuristic algorithm for a project planning problem to minimize the total project cost. Moreover, the project crashing method was implemented in the study to shorten the project duration by adding more resources to critical project activities. Wollmer 19 presented a stochastic method for a CPM of a project where the activity durations were addressed as random variables to find the minimum investment needed to complete the project regarding the expected project duration. Gutjahr et al. 20 demonstrated a stochastic optimization approach using heuristic methods. The proposed model aimed to establish the combination of measures that enables activity crashing to yield the most cost-effective solution. Azaron et al. 21 investigated a TCT problem in PERT networks and developed a multi-objective model utilizing a genetic algorithm (GA). The study results revealed that the proposed method efficiently achieved the optimal solution in such a way that the direct project cost and the project completion time were minimized. Klerides and Hadjiconstantinou 22 developed a stochastic integer programming (IP) model for the TCT problem considering different scenarios for the duration of each activity. The computational outcomes represented that the developed method could provide an efficient and flexible project scheduling solution for different sizes and uncertainty-level instances. Göçken 23 studied a fuzzy multi-objective project crashing problem where the total budget and target project completion time were considered as triangular fuzzy numbers. The effectiveness of the proposed approach was shown through a numerical example. Pathak and Srivastava 24 proposed a novel model integrating Hybrid Meta-Heuristic with a fuzzy logic framework and investigated a TCT problem considering the impact of real-life uncertainties on the cost and duration of the project activities. The case study results showed that the proposed approach could establish the Pareto-optimal front efficiently. Hoc Tran and Duc Long 25 formulated an adaptive multiple objective differential evolutions algorithm for a project scheduling problem considering the project parameters as cost, time, and risk trade-off. The proposed algorithm aimed to reduce the risk of project delays and enhance the project schedule flexibility while maintaining the solution diversity on the Pareto front. According to the findings, the proposed model could improve the efficiency of the project schedules by generating a better Pareto front compared with other widely used methods. Değirmenci and Azizoğlu 26 proposed an optimization approach for a project budget problem. The proposed approach was based on heuristic algorithms and the branch and bound-based optimization to find the most economically feasible solution among the solutions providing the minimum project completion time. The computational experiments were conducted to test the performance of the developed algorithms. It was demonstrated that the heuristic algorithms could find near-optimal solutions. Ghosh et al. 27 examined a Bayesian Belief Network (BBN)-based model that is effective and flexible in prioritizing the crashing process of the major activities in the project. The developed model aimed to find the best feasible solution minimizing both project completion time and project cost and reducing the complexity of deterministic models by considering the uncertainties between the elements of the project. An empirical example was established to demonstrate that the proposed method could effectively provide the total cost and time of any project. Tao et al. 28 set forth a stochastic chance-constraint programming model for a project scheduling problem considering stochastic activity durations and hierarchical alternatives selection. A metaheuristic framework was developed to find the solution feasibility with minimal project makespan. Numerical experiments were conducted with different uncertainty levels and sizes to represent the validation of the developed model that was compared with the classic GA. The model outperformed the classic GA in terms of both solving time and objectives. Mahmoudi and Feylizadeh 29 developed a gray linear programming (LP) model for the project crashing problem considering the uncertainties of project parameters which are time, cost, and quality of work. The research concluded that the proposed model could significantly reduce project risks. Ballesteros-Pérez et al. 30 investigated the TCT activity crashing problem proposing two non-linear models that allow for both stochastic and deterministic, as well as continuous and discrete, configurations. The model developed considering the variables as several resources involved in the activity, the activity crashed durations and crashed costs is implemented for a numerical example, where the high level of applicability and flexibility of the study was observed. Takakura et al. 31 presented an optimization approach to obtain the optimal cost allocation maximizing the project completion probability within a required completion time. Two mixed-integer LP models based on the classical CPM were developed based on activities and paths. The activity durations are addressed as discrete histograms considering the trade-off between time and cost. The developed model was implemented for different case studies, and the outcomes showed the effectiveness of the mixed-integer linear models.
Besides analytical and heuristic methods, simulation techniques have been widely used in the field of project management. Simulation is a more powerful technique than traditional methods in terms of the modeling of complex problems and its representative structure of the real world. 32 Feng et al. 33 proposed a hybrid approach integrating GAs with simulation methods to optimize the TCT scheduling problem considering the probabilistic nature of the project network. The results represented that the hybrid simulation model provided representative and efficient project schedules and assessed the project risk in terms of project completion time and cost. Li and Lei 34 introduced a discrete event simulation (DES) methodology for analyzing the TCT in construction scheduling problems under uncertainty. A numerical example was conducted to test and verify the efficiency and accuracy of the proposed methodology. Nonetheless, the cost of activity was calculated depending linearly on the random activity durations, thus leaving the crashing concept out of the scope of the study. Jolai et al. 35 studied a project network problem to determine the project completion time and the critical path to complete the project under uncertainty. A DES model was developed and compared with the traditional deterministic methods through a numerical example. It is observed that the simulation model was effective in estimating the project completion time. However, the TCT structure was not integrated into the study framework. Alzraiee et al. 15 investigated a hybrid project planning and scheduling method utilizing a CPM-based network developed in a DES environment integrated with a system dynamics model. The proposed hybrid modeling method aimed to obtain realistic project networks and identify the interactions of the factors of the project considering the uncertain structure of project durations and costs. In order to illustrate and verify the method, two case studies were conducted in the construction industry. A significant difference was observed between dynamic and static models. It was deduced that the proposed method overperformed the traditional planning methods by providing a better understanding of the actual project behavior. Farughi et al. 36 developed an approach integrating the memetic algorithm with the CPM to increase the effectiveness and efficiency of scheduling operations in flexible job shop environments with overlapping operations. The proposed method has been evaluated and demonstrated to yield better results than conventional CPM. Laslo and Gurevich 37 presented a novel optimization approach for TCT project management problems employing Monte Carlo simulations to minimize the chance-constrained budget in a project with a chance-constrained completion time. Considering different activity patterns affected by both internal and external uncertainties, the aim was to optimize budget allocation and activity durations while satisfying the chance-constrained completion time. The developed approach was validated by comparing the effectiveness of several crashing processes using Monte Carlo simulations. Mubin et al. 38 studied a TCT problem for hydropower project planning. Monte Carlo simulation was developed to ensure that the project will be completed within a pre-defined time and budget and to analyze the risk associated with project completion. The study revealed the most probable project completion time, cost, and risk factors that are sensitive to project completion time and cost. Moreno et al. 39 developed a fixed start method using DES for construction projects. The developed method aimed to ensure the planned project completion time and reduce the variability in project delay by controlling the start time of the activities. The results obtained from the case studies were compared with the PERT and the CPM. It is observed that the proposed approach demonstrated a better performance than the traditional methods in terms of assuring higher reliability in meeting the planned project completion time. Nili et al. 40 presented a new optimization framework by integrating DES with a GA to obtain the optimal sequence of repairment activities in maintenance projects to minimize cost. The proposed simulation-based optimization method was implemented for a real case study, and the findings showed the capability and accuracy of the proposed method in optimizing the maintenance plan and estimating the costs. Possik et al. 41 presented a distributed simulation framework for decision-making with Lean tools and techniques by simulating disturbances and fluctuations in industrial contexts. It enables modifications and disruptions in various variables across the product lifecycle, facilitating assessment of their impact. The proposed approach helps decision-makers identify effective Lean practices and improve operational efficiency. Abdelmegid et al. 42 focused on the development of a simulation model for cast-in-place reinforced concrete piling operations in construction projects. The main objective was to ensure a workflow minimizing disruptions caused by delays or unexpected events in upstream activities. By utilizing the proposed model, the overall simulation study was effectively managed, resulting in time savings for various modeling tasks and improved project efficiency and productivity. Soykan and Rabadi 43 investigated the bi-objective scheduling problem for runway operations by utilizing a simulation-based optimization method, which aims to minimize the operational cost and maximize fairness among aircraft considering inherent uncertainties of the operations. Computational experiments using real-life data sets from a major US airport demonstrated the effectiveness and feasibility of the proposed approach, resulting in increasing runway utilization and reducing operation delays.
In the mining industry, the uncertainties at the project implementation level are relatively high and should be managed carefully not to interrupt the turnover of project duration while preventing capital overruns. The main source of uncertainty is the discontinuity and inconsistency in geological phenomena, which results in unexpected costs and durations in a project. Since the value of a mining operation depends on the available gaps in sales potential, customer mass, demand level in the market, price cycles, and the commodity price of the mineral produced, it is crucial to keep the project on schedule. However, although it may have a remarkable effect on capital expenditure, the project management/scheduling problem in the mining industry has not attracted enough attention in previous studies. In this regard, Guo et al. 44 presented an optimization approach for a mining project scheduling problem using a GA, particle swarm optimization algorithm, and the modified particle swarm optimization algorithm. The algorithms were developed based on the network graph addressing the key parameters as the cost and time of each activity, to maximize the net present value. As a result of a case study, the modified particle swarm optimization algorithm was capable of obtaining a near-optimal solution, which is better than the original plan with the highest convergence speed. Botín et al. 6 investigated a mine development system with high complexity by utilizing a stochastic DES integrated with a program evaluation review technique and Monte Carlo simulation to minimize the duration of pre-production development. The developed discrete event methodology was validated through a case study and demonstrated that the cost and duration of the pre-production development stage could be reduced. Han and Wu 45 studied a network planning method for a mine construction organization. The presented network computing technique was validated through a case study. Renaud and Kumral 7 proposed an optimization approach integrating the CPM with LP to optimize the project schedule while maximizing the net present value of large-scale complex mine construction projects. The developed model was applied to a real-life example and revealed the effectiveness of the model in improving the net present value. Mehranfar et al. 46 employed DES to identify and evaluate bottlenecks in the loading, unloading, and in-transit processes of iron ore railcars. A field survey was conducted at a large steel factory and a mine, utilizing work-study and time-study methods to extract event times. Seven scenarios were developed focusing on infrastructure development, equipment procurement, and operations management. The methodology provided a means to examine the impact of various factors on performance, leading to a potential improvement of system performance by 20%.
In spite of several studies that have been performed on project management, multi-scenario simulation modeling of a project planning based on project crashing has not been studied in detail in the literature. Indeed, the application of project management in mining is rather limited. In this paper, a simulation-based approach is developed to analyze the trade-off between the time and cost of a mine project planning problem considering the project deadline and budget. In the field of optimization studies utilizing simulation techniques, various terms have been employed, including “simulation optimization,”“simulation-based optimization,”“optimization via simulation,” and “risk analysis supported by simulation and optimization.” These terms have been used interchangeably in the literature. While there are minor nuances between their definitions, a lack of community consensus exists. It is important to acknowledge that these definitions may vary across different fields and practices. This paper adopts the term “simulation-based optimization” as the preferred terminology. The simulation-based optimization is a method combining simulation modeling with optimization techniques to find the best set of input values or decision variables for a desired performance measure. The simulation model is used to generate data as random numbers from probability distributions and estimate the performance measures for different values of the decision variables. The optimization technique then uses this information to identify the optimal values of the decision variables that produce the best possible performance measure. The simulation-based optimization involves selecting model inputs and running simulations in a sequence to find the combination of these inputs that yields a global optimal output performance measure. The stochastic structure of the model to represent the uncertainties in project execution is addressed with randomized activity durations and costs. A multi-scenario structure is created considering different activity crashing scenarios where the activity durations are shortened in response to the cost incurred by allocating additional resources. The proposed DES model is applied to a mine development project and runs in both deterministic and stochastic environments. The outcomes are compared with the LP solutions in terms of critical path sequence, project completion time, and project cost. The comparison of the results enables a more thorough comprehension of the impacts of uncertainty and risk on project planning and facilitates an examination of the trade-off between time and cost under different scenarios. Hence, this study provides a detailed evaluation of the effects of uncertainty and different project crashing scenarios on project completion time and cost.
The contributions of this paper are (1) the development of a workflow, including LP, IP, Monte Carlo, and DES models to optimize the project scheduling problem with the trade-off between completion time and total cost; (2) the determination of bottleneck activities based on the critical paths generated through multiple realizations, and (3) the generation of multiple project crashing scenarios to minimize project completion time or total cost under deadline and budget constraints.
The rest of this paper is organized as follows. Section 2 introduces the methodology of the problem and the development of the simulation model. Computational results and analysis of the model with a numerical example are stated in section 3. Finally, section 4 concludes the paper by pointing out the final comments and proposing further research directions.
2. Methodology
Project management has become increasingly crucial for companies in recent years since time-based competition has proven to be of great strategic value to ensure continuous improvement of operations. Due to the nature of the global business environment, the equipment and machinery systems and operational processes are constantly changing and evolving, which has increased the momentum of the interest in project management. 14 In this research, a simulation-based optimization model is developed in a DES environment to assess the TCT project planning problem under uncertainty. Depending on the simulation replications realized with random durations, the criticality of the activities for the critical path is analyzed, and the bottleneck activities of the project are identified. Moreover, the project completion times obtained from simulation replications are statistically analyzed. Besides, a simulation-based optimization model with multiple crashing scenarios is formulated to minimize project completion time or total cost considering the project deadline and budget constraints. In addition, the simple project network is constructed as an IP problem to obtain the activities on the critical path. Then, the same TCT project planning problem is formulized as an LP problem based on the PERT. Thus, the project completion time and total project cost achieved by the proposed simulation approach are compared with those provided by the LP method.
For the network-based project planning methods, the project is divided into significant activities in compliance with the work breakdown structure (WBS). At this point, the standard IP model is first formulated to determine the critical path of the network. The project network is constructed as a directed Activity-On-Arc (AOA) graph,

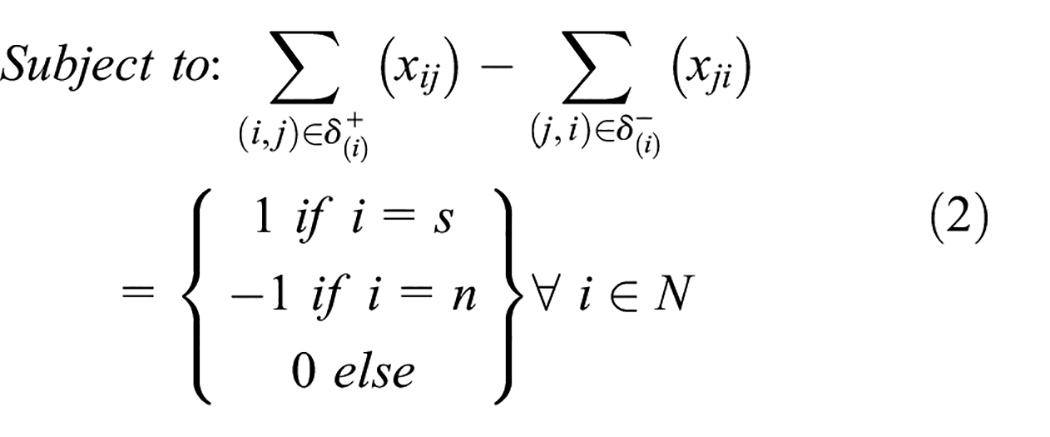

Equation (1) indicates the maximization of the total project completion time, ensuring the longest sequence of the project activities. Equation (2) denotes the flow conservation constraints, while Equation (3) restricts the variables to binary values.
The project network is then modified as an Activity-On-Node (AON) graph

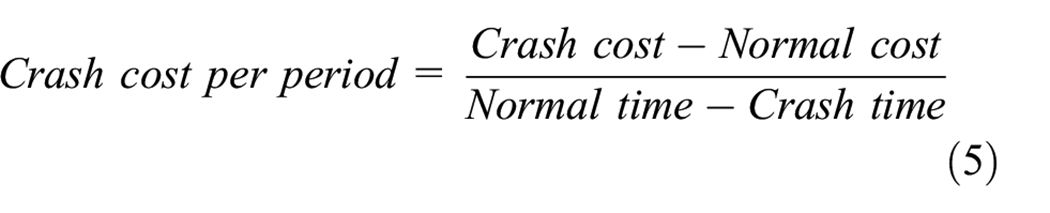
One of the most challenging tasks in project planning is to complete the project within a given timeframe while keeping the cost as low as possible by achieving a trade-off between time and cost. To meet the project deadline and accelerate the project, project duration can be reduced by crashing critical activity durations. The crash is ensured by assigning additional resources to them to shorten critical activity times. Each activity in the network has a normal time associated with its normal cost. The crash time of an activity is defined as the shortest completion time for that activity, generating crash costs. The crash cost per period for each activity in the network can be calculated using Equation (5), assuming that the crash costs are linear over periods:
The optimization of the project network based on PERT is first formulated as an LP model. The notation used in the LP model is summarized in Table 1.
Notation of LP model.
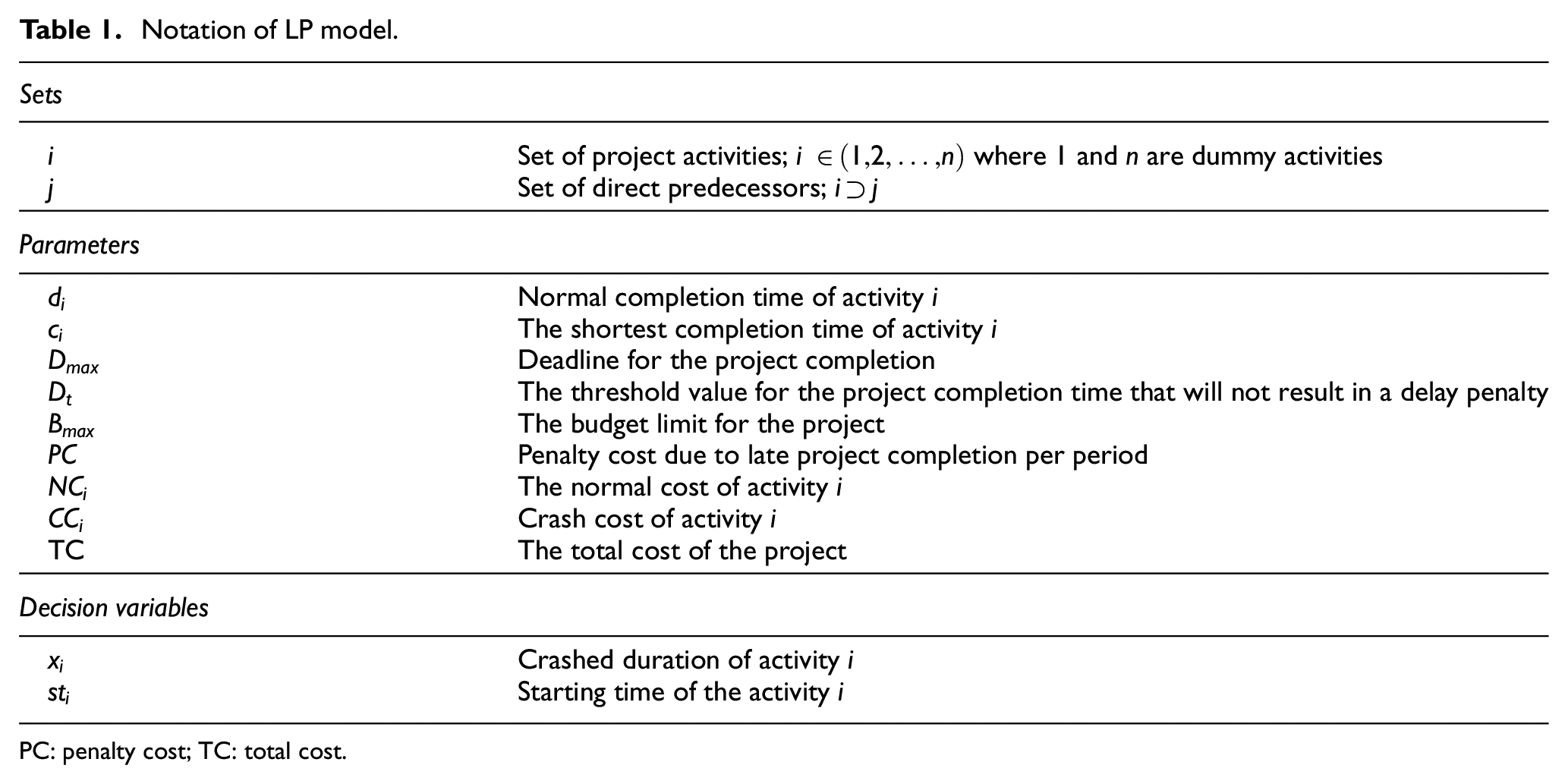
PC: penalty cost; TC: total cost.
The general expression of the mathematical model for minimizing the total project cost function (






Equation (6), the objective function, minimizes the total project cost, including normal cost, crashing cost, and delay cost. Equation (7) states that the crashed duration of an activity cannot be greater than the difference between the normal and the shortest completion time of that activity. Equation (8) defines the precedence relationships between the project activities. Activity
The LP model constructed based on the PERT method provides deterministic project plans, which do not capture the uncertain structure of the project. Therefore, the outcome of the model tends to underestimate the expected makespan and cost of the project by giving optimistic results. In this regard, the DES method, which is more powerful than exact methods in terms of representing the real world, is used to find the TCT project planning problem under uncertainty. The DES model assessed the risks associated with uncertain parameters of a mine construction project and resolved the bottlenecks within the project network. Besides, multiple project crashing scenarios are established for simulation-based optimization where the objective is to minimize either project completion time or total cost under deadline and budget constraints. The structure of the proposed project planning approach is illustrated in Figure 2.
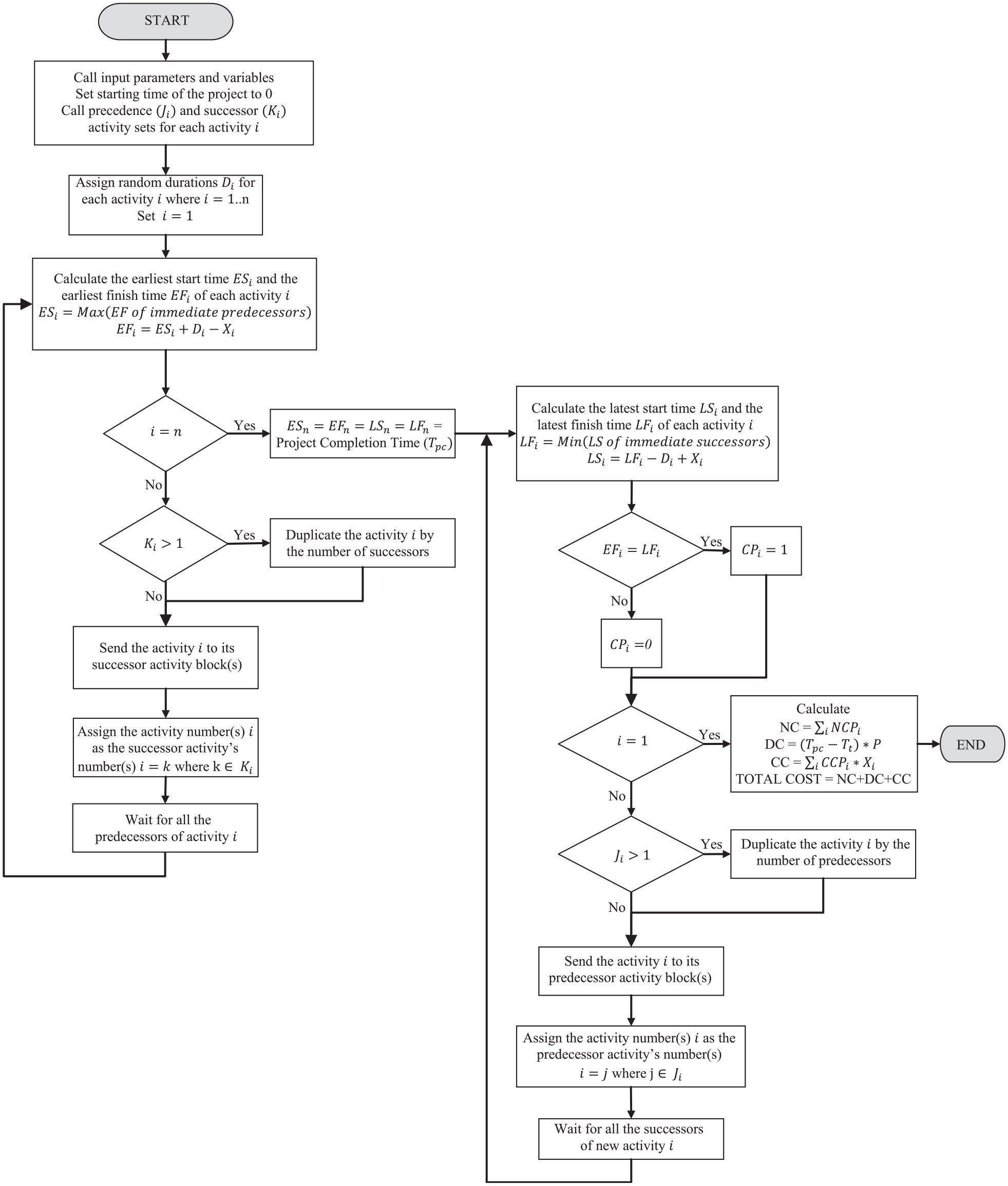
The simulation workflow of the proposed project planning approach.
In the developed network model, there are


Equation (13) minimizes the total project cost, including delay, normal, and crashing costs. Equations (14) and (15) ensure that the project completion time
The research methodology steps conducted in this paper are summarized in Table 2. The methodology represented combines deterministic and stochastic approaches and simulation optimization techniques to provide a comprehensive understanding of the impact of uncertainty and project crashing on the critical path and project completion time. This approach allows for informed decision-making and risk management in project planning and execution.
The research methodology.
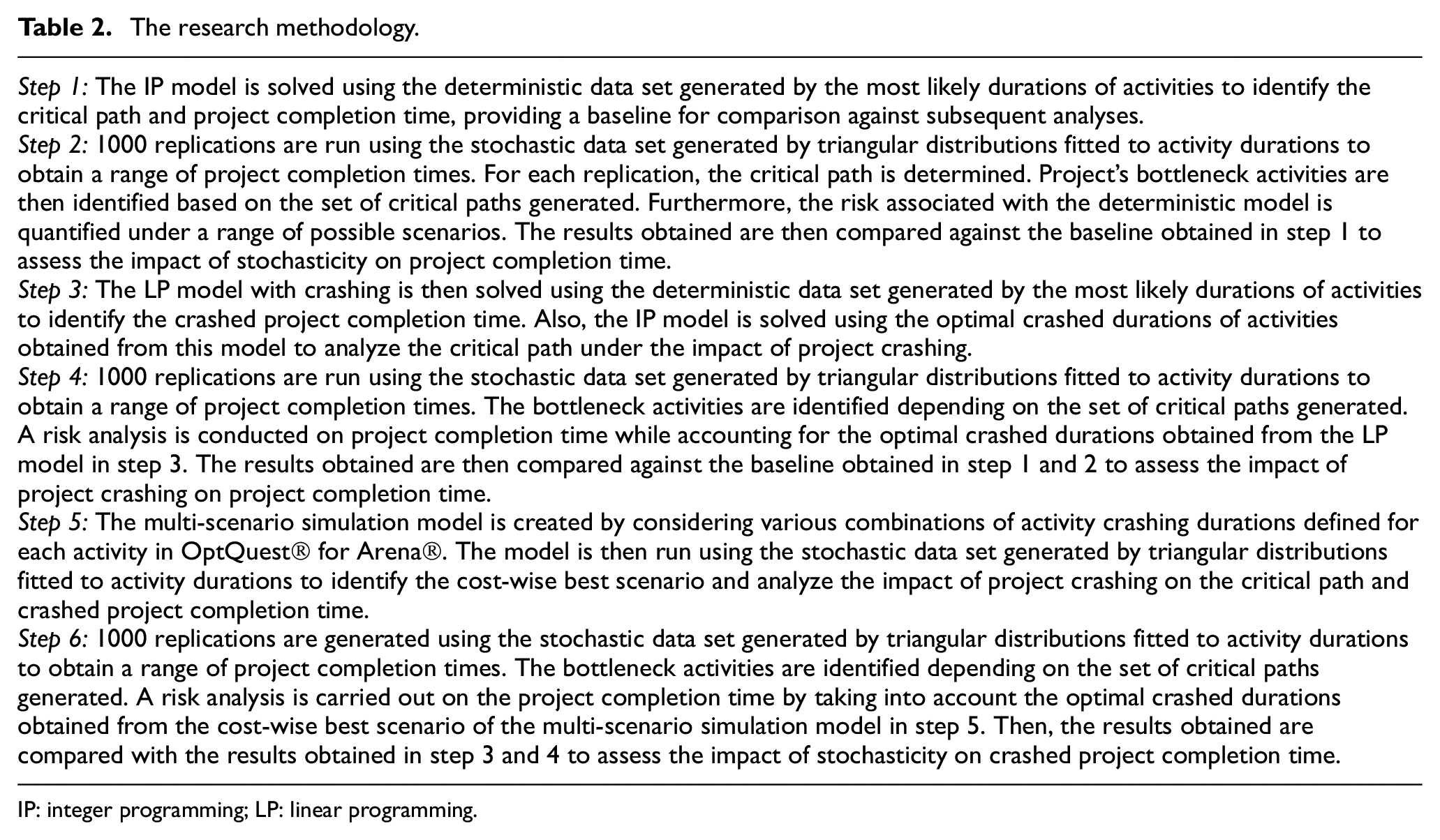
IP: integer programming; LP: linear programming.
3. Case study
Mining construction projects are composed of unique operational activities which occur within a specific period. The value of a mining operation highly depends on the timing of the project. Therefore, the developed simulation model is implemented in a moderately large underground mine construction project, and the computational outcomes are evaluated and compared with an LP approach to reveal the applicability and capability of the model.
On this basis, an underground mine construction project consists of 37 activities with two milestones indicating project starting and project finishing activities, as it is represented in Table 3. The data set used in this study was obtained from expert opinions from the mining industry professionals, who provided activity precedence relationships and estimates of activity durations and cost values based on their experience and expertise in the field. The activity list covers the full range of a mine construction project, which starts from obtaining the operating license to producing ore. The activities for site preparation include clearing and leveling, ditching, and surfacing, and road construction. For the construction of the surface facilities, including processing plant, maintenance and warehouse facilities, and administrative buildings, construction activities are taken into consideration. The activities for equipment procurement involve ordering, delivery and assembly, and equipment installation. Finally, the mining preparation activities consist of all the underground mine development activities required to access the orebody.
Activity list of the mine construction project.
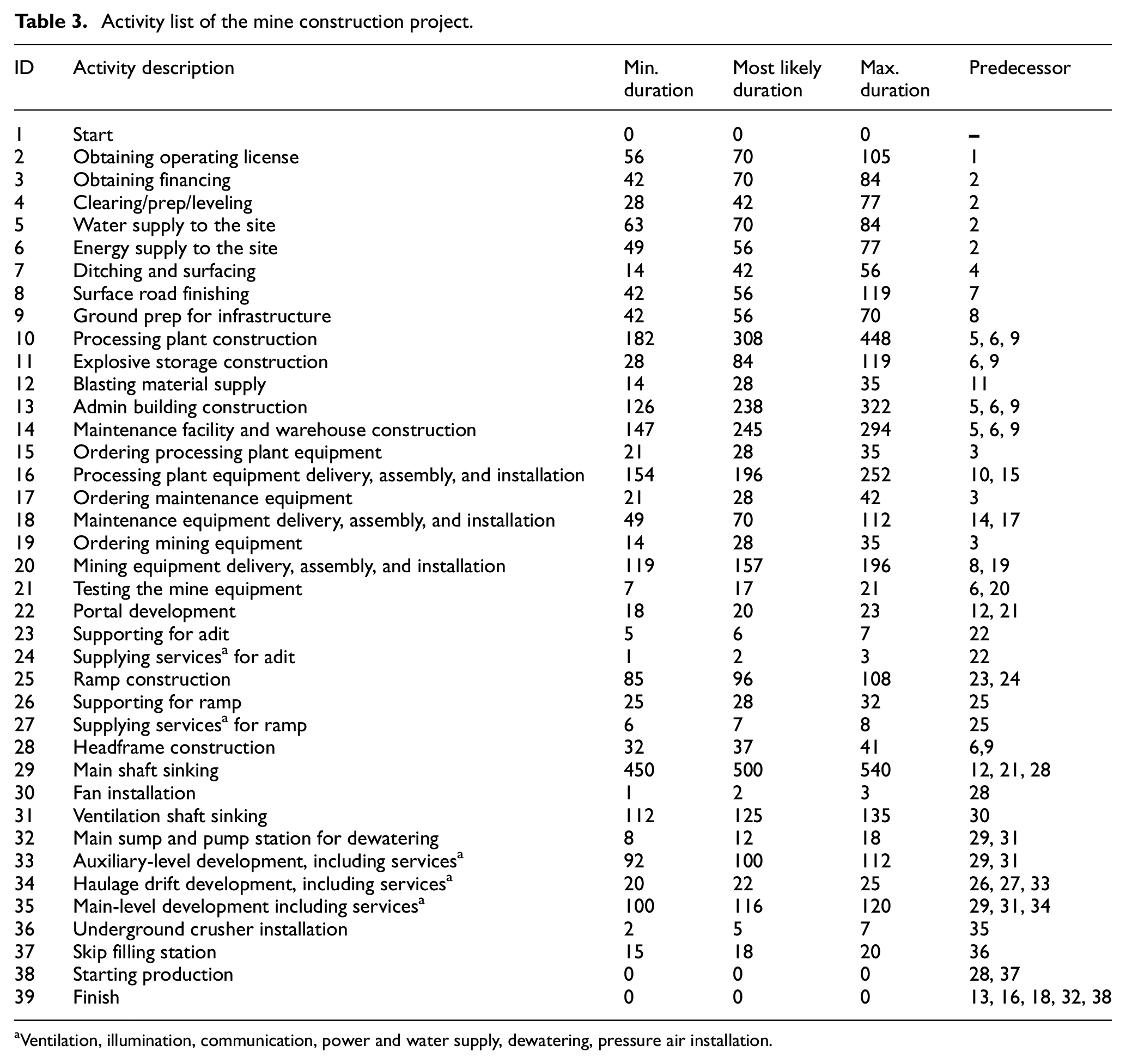
Ventilation, illumination, communication, power and water supply, dewatering, pressure air installation.
The IP model in which the activity durations are defined as the most likely durations is solved using the IBM ILOG CPLEX solver. The critical path obtained covers 15 activities, including 1, 2, 4, 7, 8, 20, 21, 29, 33, 34, 35, 36, 37, 38, and 39, as demonstrated in Figure 3. The project completion time is calculated as 1145 days.
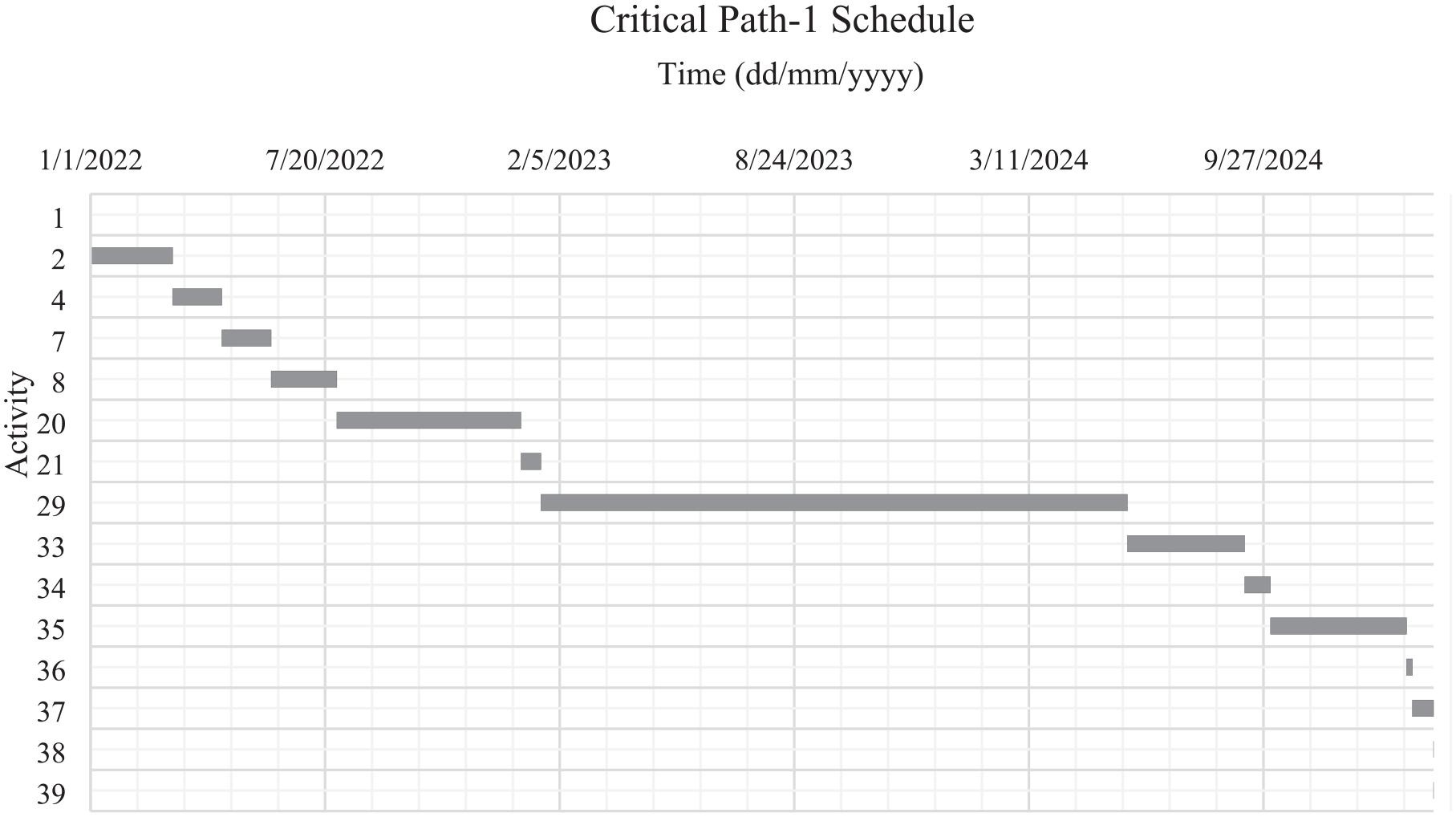
The critical path schedule for Path-1.
After obtaining the critical path by the deterministic approach, the activity network diagram is constructed in a dynamic simulation environment using Arena® Simulation Software. The stochastic input data set is introduced, and the developed model is then computed to determine the bottleneck activities of the project and analyze the risk related to project completion time under stochastic activity durations. Due to stochasticity embedded in the model, the simulation model is replicated 1000 times to eliminate the initial bias where a balance point is reached. It is observed that the developed model chooses between two paths as the critical path according to the assigned random activity durations, as it is seen in Figures 3 and 4. Both paths include activities 1, 2, 4, 7, 8, 29, 33, 34, 35, 36, 37, 38, and 39. Since these activities are included in the critical path in every replication, their probability of occurrence on the critical path is calculated as 100%, and they are indicated as bottleneck activities. Path-1 includes the same activities as the one obtained from the IP model. Depending on the durations, the changing segment covers activities 9, 11, and 12 from Path-2 as an alternative for activities 20 and 21 from Path-1. The probability of occurrence of activities 9, 11, and 12 from Path-2 on the critical path is calculated as 29.4%, while it is found as 70.6% for activities 20 and 21 from Path-1. According to the statistical analysis conducted on the outputs retrieved from 1000 replications, the project completion times are fitted into the best distributions. It is observed that the project completion times can be identified using a normal distribution with a mean of 1167.3 and a standard deviation of 33.3. Figure 5 displays the histogram of the original output data and the fitted normal distribution. Considering the stochastic activity durations, it is observed that the project completion time is expected to be less than or equal to 1222 days with 95% probability. Moreover, the probability that the project completion time is expected to be less than or equal to 1145 days is calculated as 25.1%. Compared with the deterministic approach, the simulation model generates probabilistic information considering the uncertainties during the execution of the project such that risk associated with completion time is quantified. The results obtained under these uncertainties show how far the deterministic approach deviates in terms of project completion time.
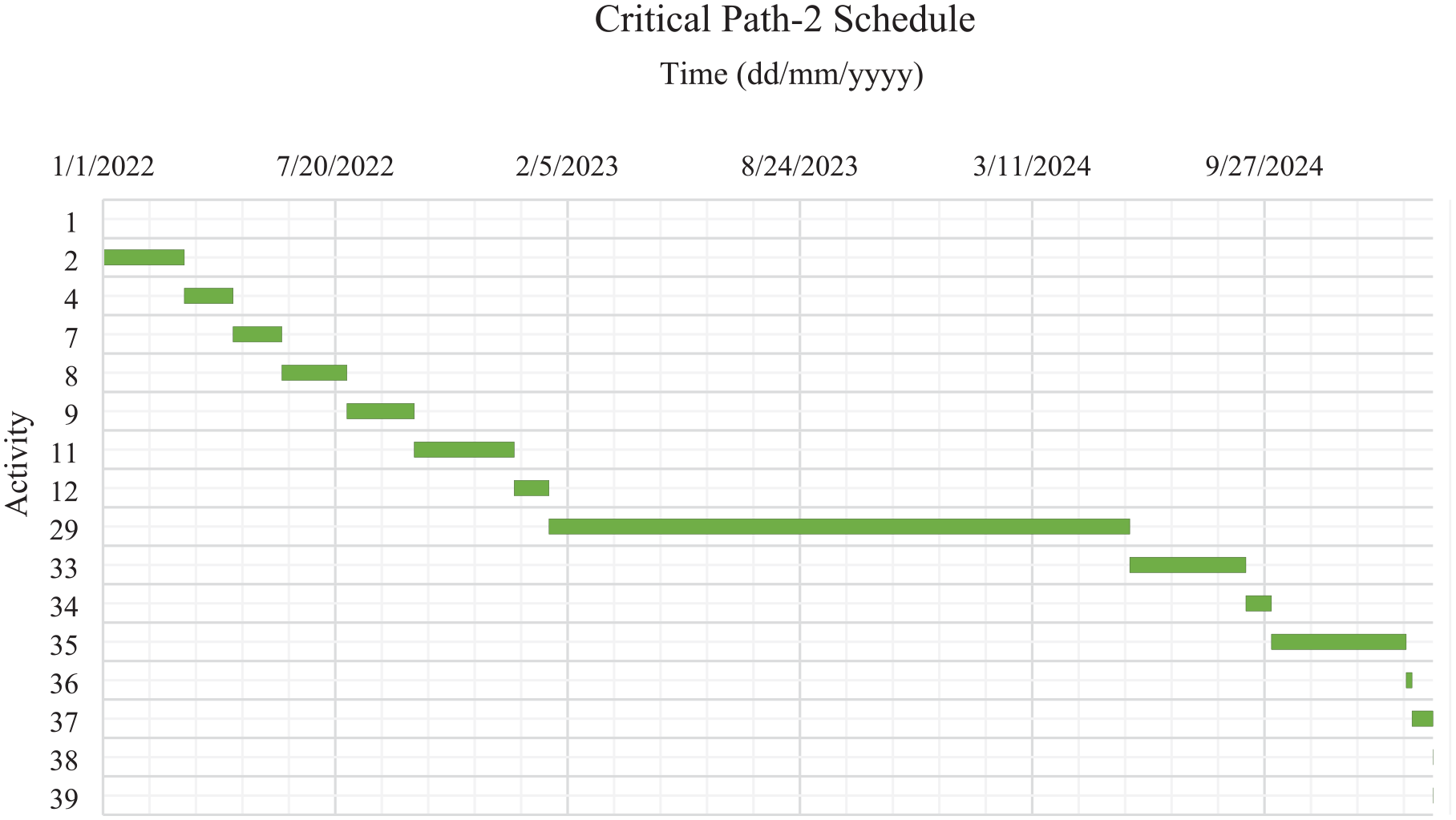
The critical path schedule for Path-2.
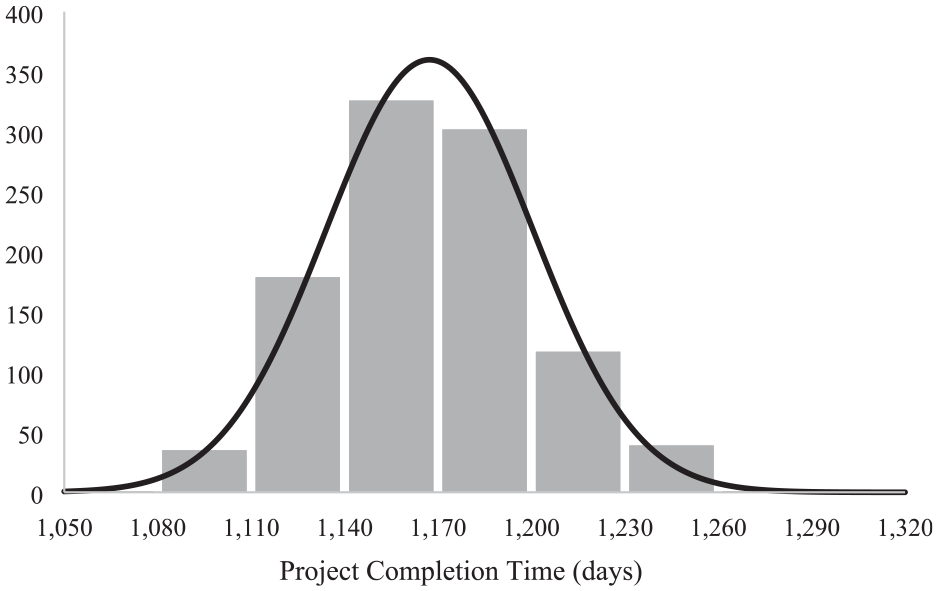
Fitting normal distribution for project completion times without crashing of the LP model.
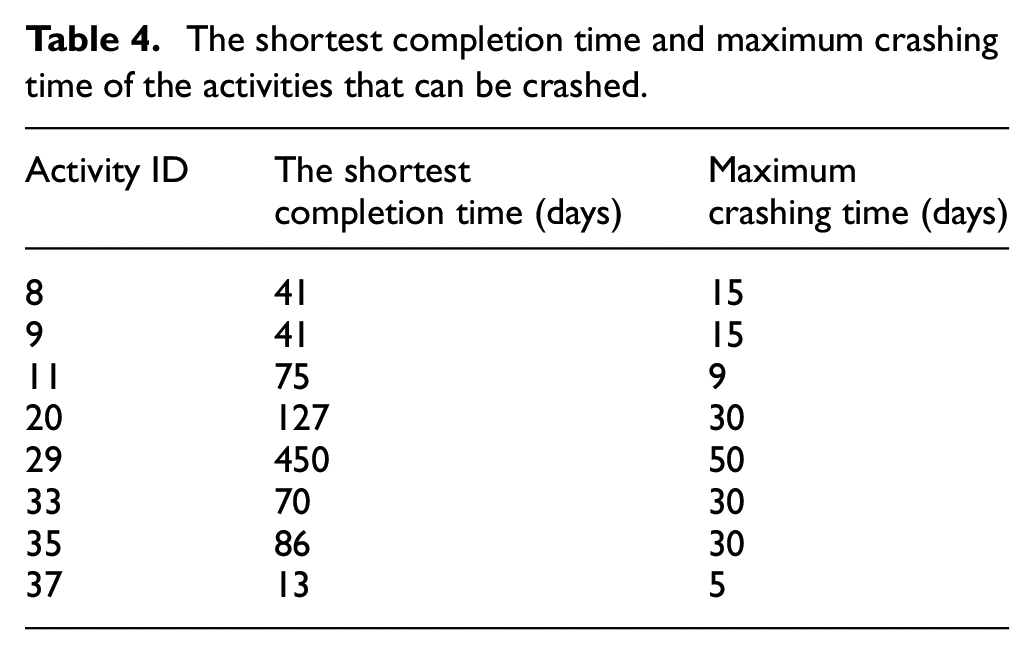
Furthermore, project crashing is applied to the model where the project duration can be shortened by assigning additional resources to the system to meet the project deadline and accelerate the project. The crashing concept, which creates a trade-off between time and cost required to be achieved by completing the project within a given deadline while keeping the cost at the minimum possible level, is a challenging task in project planning. The optimization of the project network constructed based on PERT is formulated as an LP model considering the project crashing method, as the general expression of the mathematical model for minimizing the total project cost function is explained in Equations (6)–(12). Accordingly, the shortest completion time and the maximum crashing time of the activities that can be crashed are determined based on expert opinions and shown in Table 4.
The shortest completion time and maximum crashing time of the activities that can be crashed.
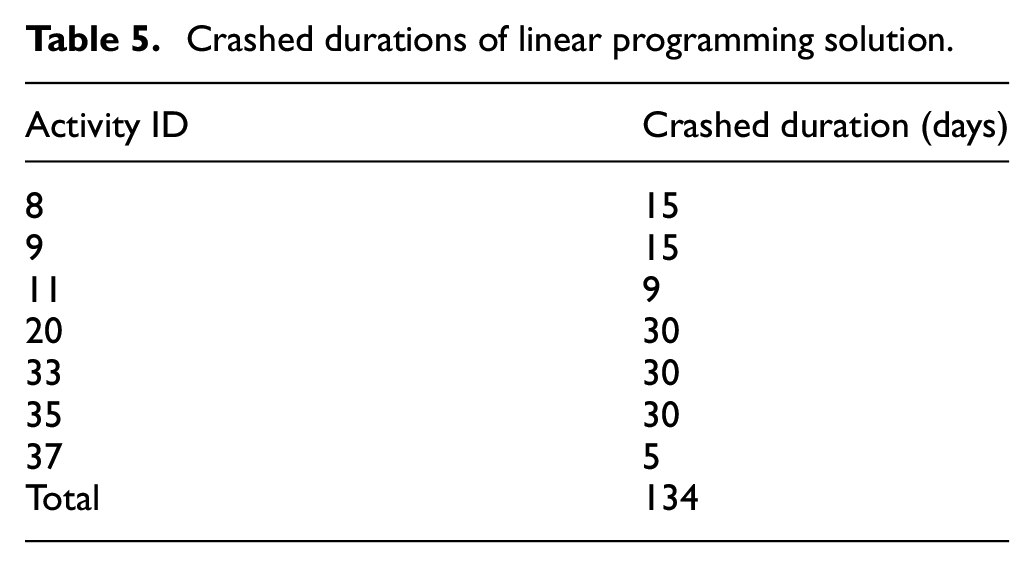
For each activity in the network, the normal cost and the crash cost per period corresponding to the normal activity execution and crashing times are calculated, respectively. In addition to the project deadline, which is indicated as 1145 days, a project completion threshold value is defined as 1025 days. The delay penalty calculated according to expert opinions is applied for each day when this threshold value is exceeded. The total budget function, affected by the normal cost, crash cost, and delay cost items, is also introduced into the model. Then, the LP model is solved using the IBM ILOG CPLEX solver. The optimal project completion time is calculated as 1035 days. According to the results obtained, the crashed durations of the activities are demonstrated in Table 5. With a total of 134 crashing activities, the project duration is shortened by 110 days, which indicates that the duration of the project is reduced by 9.6%. The total project cost is calculated as $43,819,405, while 95.8% of that is observed as normal cost, 3.7% is crashing cost, and 0.5% is delay cost. Moreover, the IP model where the activity durations are defined considering the crashed durations obtained from the LP model is solved using the IBM ILOG CPLEX solver. It is observed that the model generates two paths as the critical path according to the crashed activity durations. The critical Path-1 covers 15 activities, including activities 1, 2, 4, 7, 8, 20, 21, 29, 33, 34, 35, 36, 37, 38, and 39, while the critical Path-2 consists of 16 activities, including activities 1, 2, 4, 7, 8, 9, 11, 12, 29, 33, 34, 35, 36, 37, 38, and 39.
Crashed durations of linear programming solution.
Considering the crashing durations specified, the activity network diagram constructed using Arena® Simulation Software is computed to analyze the risk related to project completion time under stochastic activity durations. The simulation model is replicated 1000 times, and it is observed that the developed model creates three paths as the critical path according to the assigned random activity durations. All paths include the activities 1, 2, 29, 33, 34, 35, 36, 37, 38, and 39. The probability of occurrence of these activities on the critical path is calculated as 100%. Therefore, they are indicated as bottleneck activities. Path-1 and Path-2 include the same path schedule as in Figures 3 and 4, respectively. Path-3 schedule is illustrated in Figure 6.
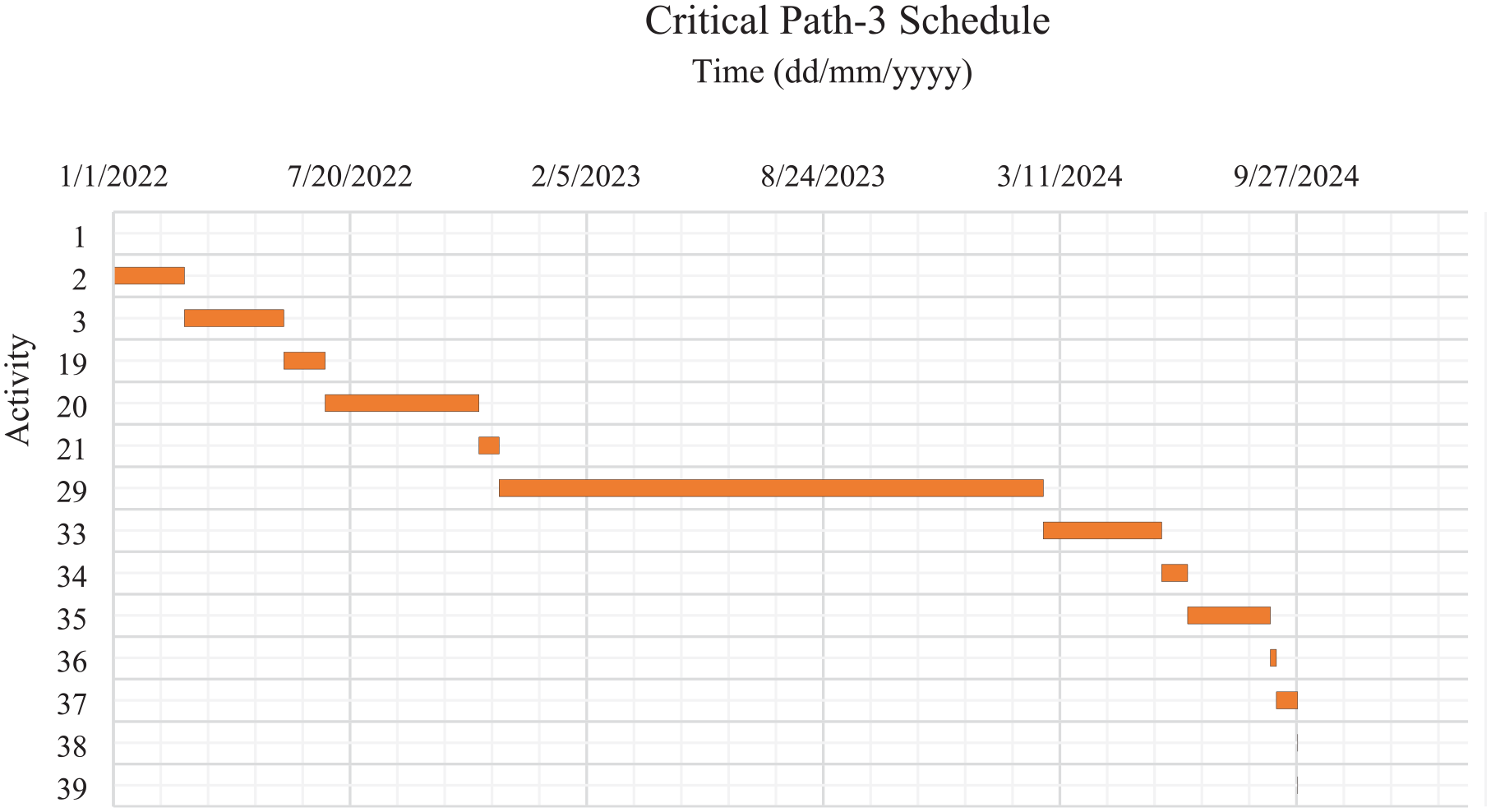
The critical path schedule for Path-3.
Depending on the durations, the changing segment on the Path-3 covers activities 3 and 19, instead of the activities 4, 7, and 8 from Path-1, and activities 4, 7, 8, 9, 11, and 12 from Path-2. The probability of occurrence of activities 3 and 19 on the critical path is calculated as 0.5%, while it is found as 38.3% for activities 9, 11, and 12; 61.7% for 20 and 21; and 99.5% for 4, 7, and 8.
According to the statistical analysis conducted on the outputs retrieved from 1000 replications, it is observed that the project completion times can be identified using a normal distribution with a mean of 1059.4 and a standard deviation of 33.1. Figure 7 illustrates the histogram of the original output data, and the fit line on the histogram shows the normal distribution line. It is also observed that the project completion time is expected to be less than or equal to 1114 days with 95% probability, while it is observed as 1222 days without project crashing. Moreover, the probability that the project completion time is expected to be less than or equal to 1035 days is calculated as 23.1%. Therefore, for the stochastic activity durations, it is deduced that the project duration can be shortened by 108 days, which indicates that the duration of the project is reduced by 8.9%.
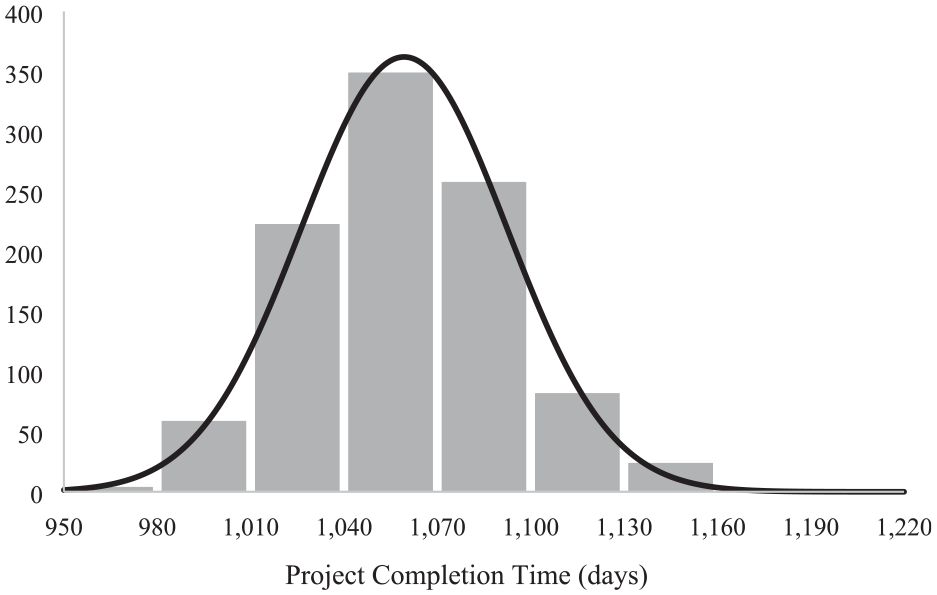
Fitting normal distribution for project completion times with crashing of the LP model.
Besides, the simulation-based optimization model is developed considering 20,736 different project crashing scenarios to minimize the total project cost under the project budget and the project deadline constraints. Using the OptQuest® for Arena® Simulation Software, the objective function and the constraints are defined and integrated into the developed simulation model. The general expression of the equations defined in OptQuest® for Arena® is explained in Equations (13)–(15). Control, that is, decision variables of the system are specified as the crashed durations of the activities. The multiple scenarios, including different crashing duration combinations of the activities, are created depending on the maximum crashing time and the steps of the activities given in Table 6 and introduced into the model. In addition, the critical path and crashed duration variables of each activity, and the normal cost, crashing cost, delay cost, total project cost, and the project completion time variables are determined as the response, that is, output, variables of the system. In this regard, using the stochastic input data set, the simulation-based optimization formulation is solved in the OptQuest® for Arena® Simulation Software such that the optimal project completion time is achieved through project crashing, which gives the cost-wise best output among all the scenarios.
Maximum crashing time and the steps of the activities.
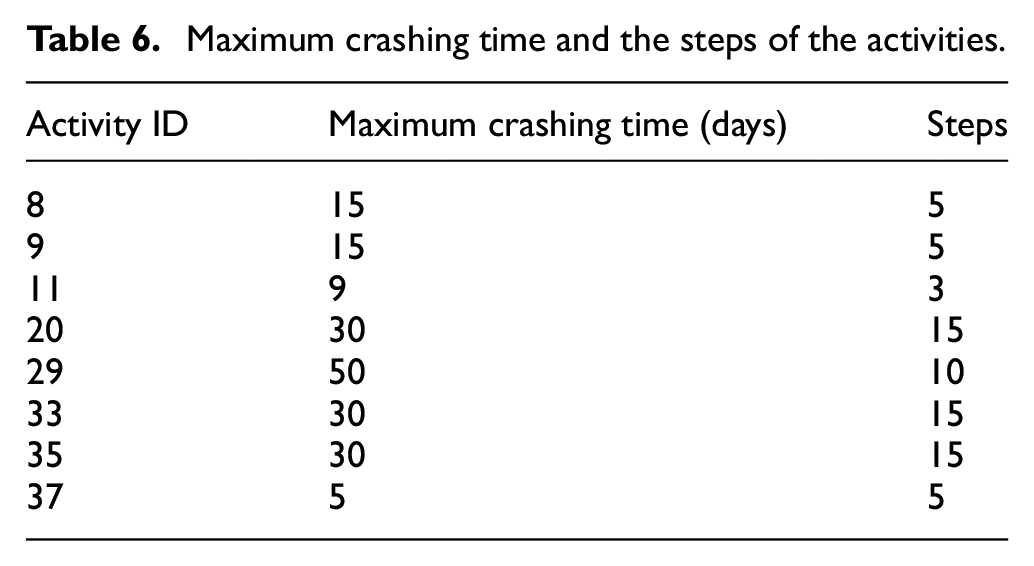
Figure 8 illustrates the simulation results of the project crashing scenarios. As project completion time is reduced by crashing, it is seen that the crashing cost gradually increases. Similarly, as project completion time is extended, the delay cost increases gradually since the delay penalty is applied when the project completion time exceeds a threshold value which is defined as 1025 days. In addition, it is observed that the total project cost represents a trade-off point, indicating the cost-wise best scenario, depending on these two cost items. The cost-wise best scenario is achieved when the project completion time is obtained as 1041 days. According to the results, it is observed that the critical path covers 15 activities, including activities 1, 2, 4, 7, 8, 20, 21, 29, 33, 34, 35, 36, 37, 38, and 39.
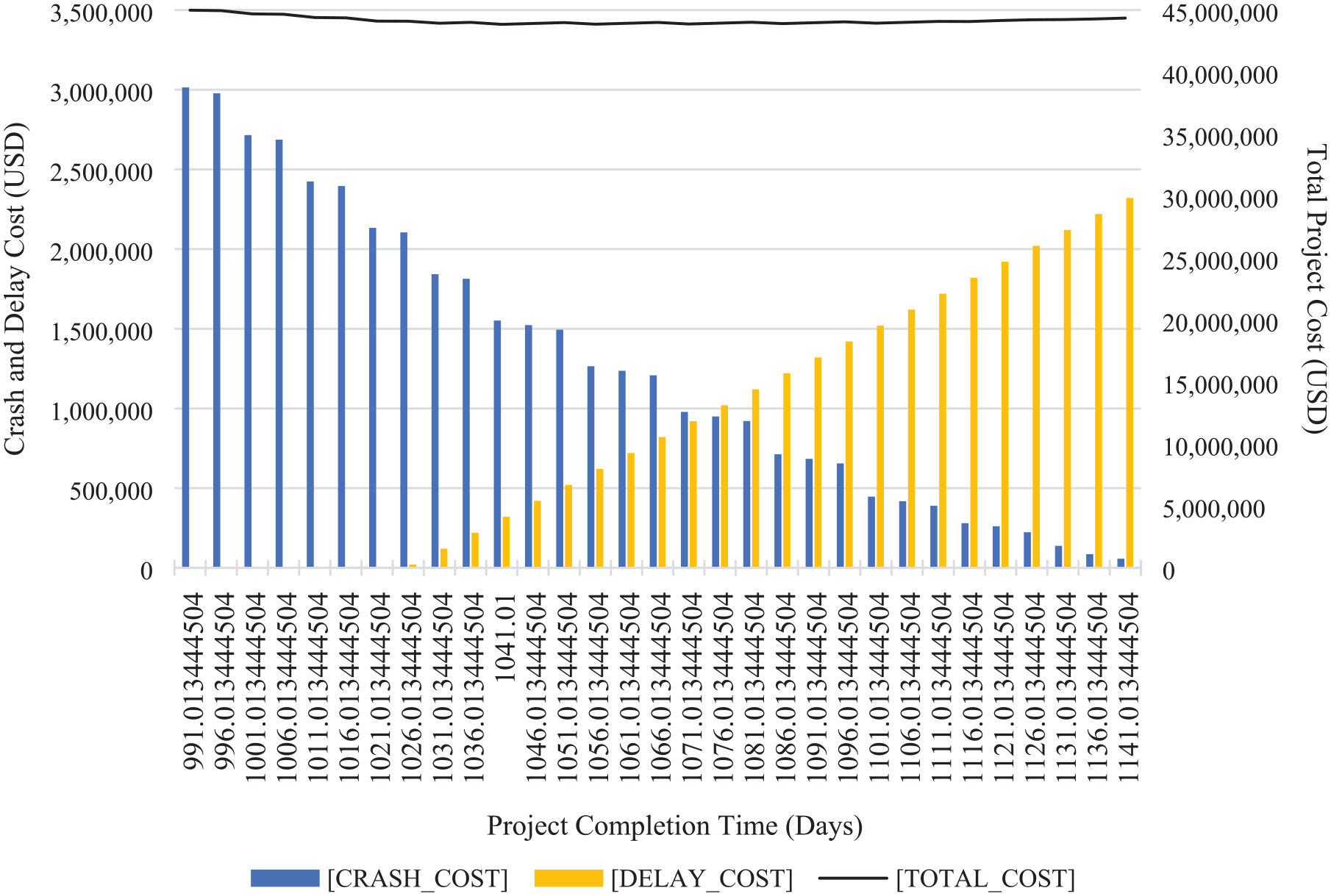
Multi-scenario simulation results on cost items.
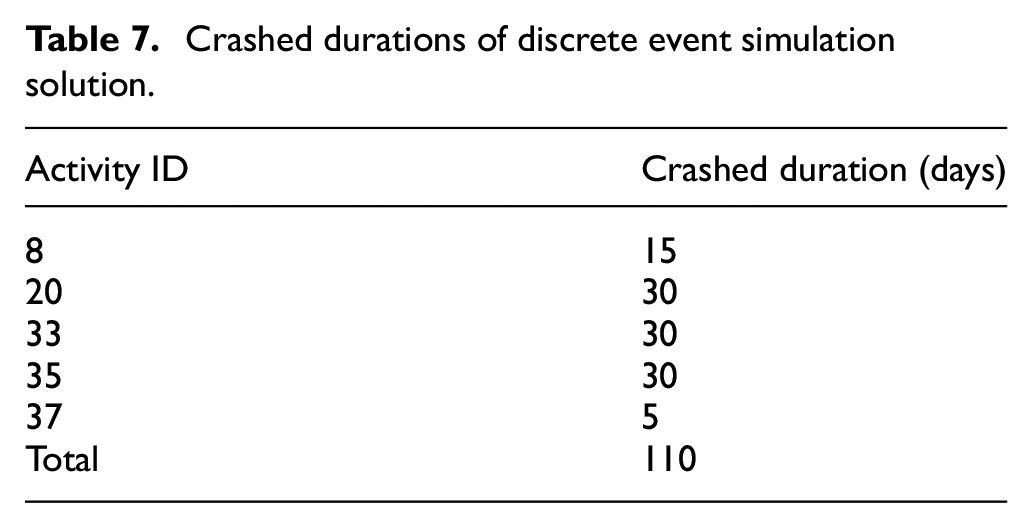
For the cost-wise best case, the crashed durations of the activities are illustrated in Table 7. With a total of 110 days of crashing, the total project cost is calculated as $43,842,620, while 95.7% of that is observed as normal cost, 3.6% is crashing cost, and 0.7% is delay cost.
Crashed durations of discrete event simulation solution.
According to the statistical analysis conducted on the outputs retrieved from 1000 replications of the cost-wise best scenario with crashing durations specified, it is observed that the model creates three paths as the critical path in which each covers the activities 1, 2, 29, 33, 34, 35, 36, 37, 38, and 39. These activities are indicated as bottleneck activities since the probability of occurrence of them on the critical path is calculated as 100%. Path-1, Path-2, and Path-3 include the same activity sequence shown in Figures 3, 4 and 6, respectively. The probability of occurrence of activities 3 and 19 on the critical path is calculated as 0.4%, while it is found as 28.4% for activities 20 and 21, 71.6% for 9, 11, and 12, and 99.6% for 4, 7, and 8. Moreover, it is observed that the project completion times can be identified using a normal distribution with a mean of 1072.6 and a standard deviation of 34.3. Figure 9 illustrates the histogram of the original output data and the fit line on the histogram points to the normal distribution line.
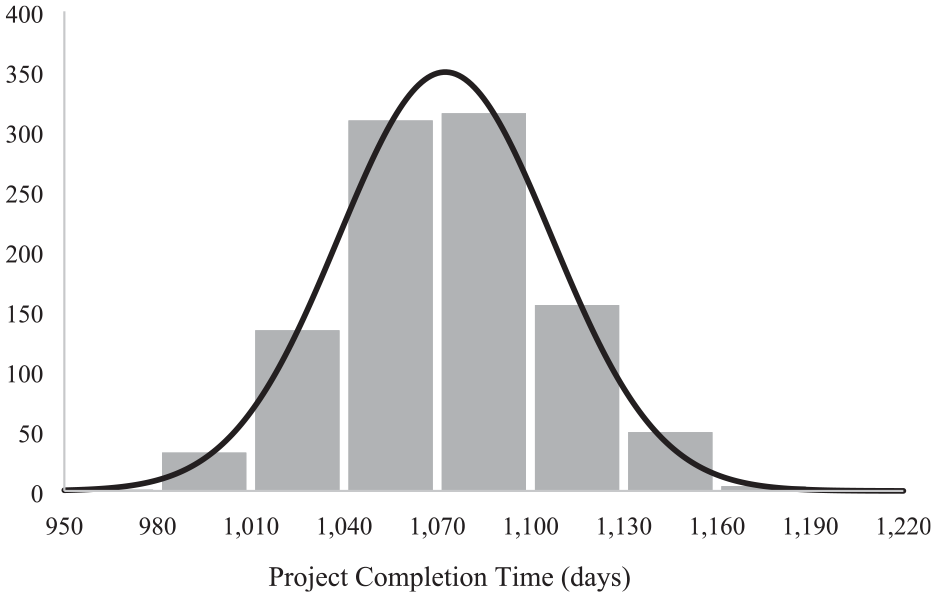
Fitting a normal distribution for project completion times with crashing of the DES model.
Considering the stochastic activity durations and 110 days of crashing activity, the probability that the project completion time is expected to be less than or equal to 1041 days is calculated as 17.8%. Moreover, the expected project completion time with 95% probability is calculated as 1129 days, while it is observed as 1222 days without project crashing. Thus, for the stochastic activity durations, it is deduced that the project duration can be shortened by 93 days indicating the duration of the project is reduced by 7.6%.
4. Conclusions
Managing construction projects is one of the significant challenges, especially for large-scale production industries since this type of planning needs continuous improvement specific to the project goals and the working environment. Notably, for time-sensitive engineering projects where the operational uncertainties are quite high, there are many difficulties in predicting project completion time and total project cost. Such projects are typically subject to large risks that might result in schedule and cost overruns which can be critical to meet the project deadline and the project budget. In the mining industry, the timing of a construction project is of vital importance because the value of a mining operation depends on the available gaps in sales potential, customer mass, the level of demand in the market, price cycles, and the commodity price of the mineral produced. The project risk should be managed based on the company’s financial and operational risk appetite, which is highly changeable depending on the project dynamics and goals. Besides, the standard scheduling methods are insufficient to apply to construction project problems as they do not fulfill the need for reliable decision-making support.
In this paper, a multi-scenario DES model is developed to find the TCT project planning problems with a dynamic and stochastic structure. The proposed model is implemented in an underground mine construction project. This project includes 37 activities with two milestones indicating project starting and finishing activities. The activity list comprises the full range of mine construction between obtaining the operating license and starting production. The project network is constructed as an AON graph to represent the precedence relationships among activities. The IP model is solved using IBM ILOG CPLEX solver, and the project completion time is calculated as 1145 days. On the contrary, based on the simulation replications realized with different random durations, the criticality of the activities for the critical path is analyzed and the bottleneck activities of the project are identified using Arena® Simulation Software. The outputs on the project completion times obtained from 1000 simulation replications are statistically analyzed. Considering the stochastic activity durations, it is observed that the probability of the project completion time being less than or equal to 1145 days is 25.1%. In addition, the same TCT project planning problem is formulized as an LP problem, including the information about the project crashing, and solved using IBM ILOG CPLEX solver. The project completion time is calculated as 1035 days after the project crashing. It is observed that the project duration is shortened by 110 days, executing a $43,819,405 total cost. Besides, a simulation-based optimization model with stochastic activity durations and multiple crashing scenarios is formulated as to minimize the total project cost under the project budget and the project deadline constraints. Using the OptQuest® for Arena® Simulation Software, the objective function and the constraints are defined and integrated into the developed simulation model. For the cost-wise best scenario obtained, 110 days of crashing is achieved, while the project completion time and total project cost are obtained as 1041 days and $43,842,620, respectively. One thousand simulation replications are executed for the optimal solution of the LP model, and the cost-wise best scenario of the DES model considering the crashing durations obtained and the outputs are statistically analyzed. Considering stochastic activity durations and the crashed durations obtained from the optimal solution of the LP model, it is deduced that the project duration can be shortened by 8.9%. Similarly, it is calculated as 7.6% by using the stochastic activity durations with the crashed durations obtained from the best scenario of the DES model. The proposed model allows project managers to assess the critical path and identify bottleneck activities, enabling them to prioritize and allocate resources effectively. In addition, the analysis of simulation replications with different activity durations offers a probabilistic view of reality, helping project managers understand the inherent uncertainties and make more informed decisions regarding project scheduling and risk mitigation. The formulation of the TCT problem as an LP model and simulation-based optimization model provides project managers with alternative project schedules and crashing options, allowing them to explore trade-offs between time and cost and select the most suitable approach. Overall, the comprehensive analysis and insights gained from this study empower project managers to optimize project planning, manage uncertainties, and make informed decisions that align with project goals. The methodology employed in this study has been designed to be adaptable and scalable to different mining projects tailored to the unique conditions and requirements of each individual project.
In future studies, the model can be extended to projects having more detailed and complex structures. Further research could be directed toward ingraining resource availability constraints to the proposed methodology. In this way, resilient schedules can be designed considering different types of schedule disruptions, such as material supply disruptions and resource shortages. Moreover, more representative schedules may be achieved by considering the integration of the activity duration disruptions. These disruptions may be caused by operational and environmental conditions such as the seasonality effect on construction operations. Besides, fluctuations in the global and domestic market for the corresponding commodity price can be integrated into the future model so that the effect of the market movement on the planning decisions can be inspected in real time to extend the available knowledge on project management.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Natural Sciences and Engineering Research Council of Canada (NSERC) (Fund number: NSERC RGPIN-2019-04763), MITACS and Dumas Mining for supporting this research (MITACS IT32728 ACC). The authors are grateful for this support.