
Abstract
We consider importance sampling simulation for estimating the probability of reaching large total number of customers in an
1. Introduction
In this paper, we explore possibilities for importance sampling in a Markovian tandem queue. With importance sampling, the underlying probability distributions are changed to speed up a simulation. This change of the probability distributions is also called a change of measure. When exploring the possibilities for a change of measure, we focus on the probability of total buffer overflow during a busy cycle of an
This problem was first studied by Parekh and Walrand,
1
where a state-independent change of measure is suggested based on heuristics. In that paper, the authors note that their change of measure performs poorly in practice in some cases. Afterwards, in Glasserman and Kou,
2
necessary and sufficient conditions have been determined for d-node
To resolve this issue, in the work of Dupuis et al.,
4
a state-dependent change of measure has been developed for the two-node
Another approach has been developed by Blanchet, 9 where an algorithm is presented that gives bounded relative error. This approach uses the time reversed process of Jackson networks. While the time reversed process is known for Jackson networks, this is not the case in other contexts, e.g., for non-Markovian tandem queues. Thus, even though a more efficient simulation approach might exist for the model in the current paper, the approach that we use here is generalizable to processes where the time reversed process is unknown, see, for example, Buijsrogge et al. 7 Therefore, we believe that the insights obtained in this paper can be useful for those types of processes.
In addition, in the work of Sezer,
10
an approximation method has been developed for the two-node
Even though the problem that we consider has been studied previously in1–4,6,9,11 and asymptotic efficiency of changes of measure based on subsolutions has been shown in some of these works,4,6,11 still there are “only” three such changes of measure known that have been proven to be asymptotically efficient for the two-node
In this paper, we give sufficient conditions for an asymptotically efficient change of measure based on subsolutions for the
Moreover, in this paper, we consider both
The contributions of this paper are two-fold. After summarizing the subsolution method for importance sampling and stating the results from Dupuis et al.
4
and Dupuis and Wang
6
in Section 2, our first contribution is in Section 3, where we state conditions for a change of measure for the d-node
2. Model and preliminaries
2.1. The model
In this paper, we consider a d-node
We consider the underlying embedded discrete time Markov chain and we assume without loss of generality
We let
As in the work of Dupuis et al.,
4
we let
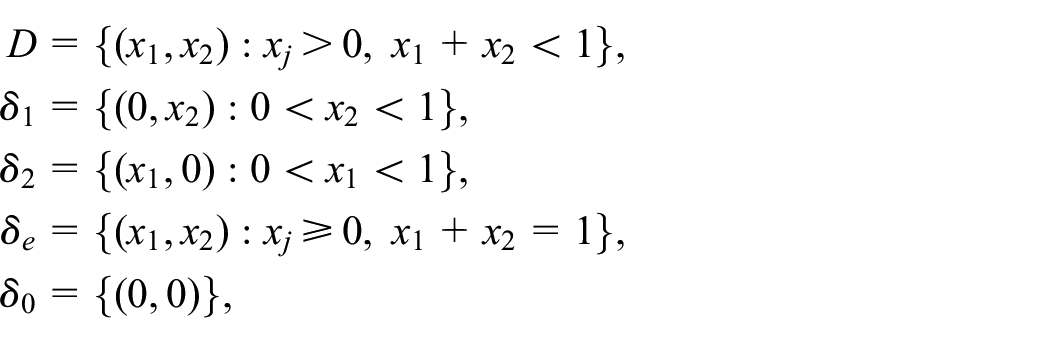
and this is sketched in Figure 1.
A sketch of the scaled state description of the event of interest.
Using these definitions, we can define the first time that the process hits level N in a busy cycle as

and we set

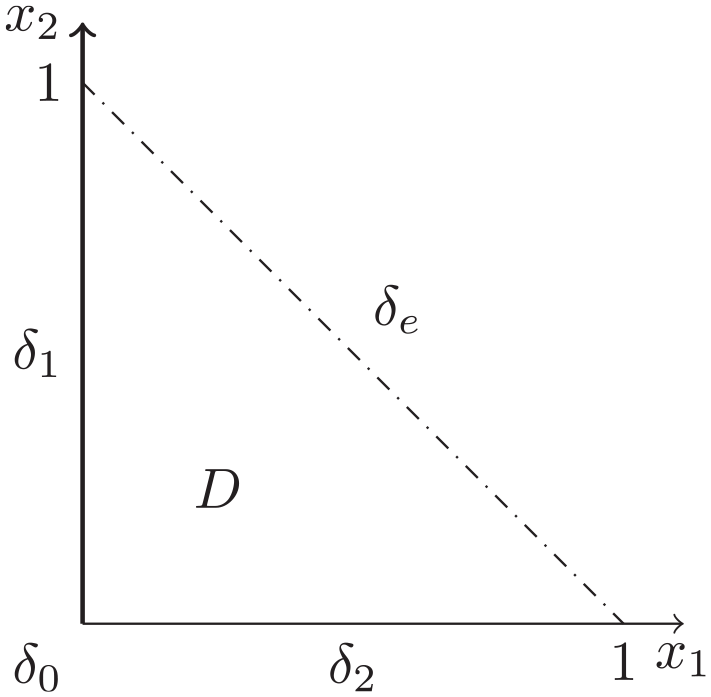
It is known that the asymptotic decay rate of this probability is given by
where
2.2. Importance sampling simulation
To estimate our probability of interest using simulation, we use importance sampling. In importance sampling, we perform our simulation under some new measure

where

where
As in the work of Dupuis et al.,
4
we construct a subsolution

where

If we compare Equation (4) with the corresponding notation in the works of Dupuis et al.
4
and de Boer and Scheinhardt,
11
a factor 2 is missing. However, we will also scale the function
As we are interested in finding a change of measure that gives an asymptotically efficient estimator for

or equivalently,

to hold.
In previous works,4,6,11 a subsolution is constructed (assuming
2.3. Subsolution approach
In both Dupuis et al. 4 and Dupuis and Wang, 6 the change of measure for (two-node) tandem queues (and Jackson networks) has been studied. In those papers, the change of measure has been determined using subsolutions. We first briefly recap the ideas presented in those papers and we start with a formal definition of a subsolution, see also Dupuis et al. 4
Definition 2.1
A function
W is continuously differentiable,
In Dupuis et al.,
4
there is an additional condition in this definition that needs to hold at the boundaries of the state space. Instead, we include the boundaries of the state space in
It is known from Glasserman and Kou
2
and de Boer
3
that for an asymptotically efficient change of measure it is not possible that
To determine such a change of measure that differs along various parts of the state space, in the work of Dupuis et al.,
4
there are multiple – say r– affine functions

where

To satisfy the continuous differentiability, which is the first requirement for a function to be a classical subsolution, the functions

such that
Assumption 2.1
We choose
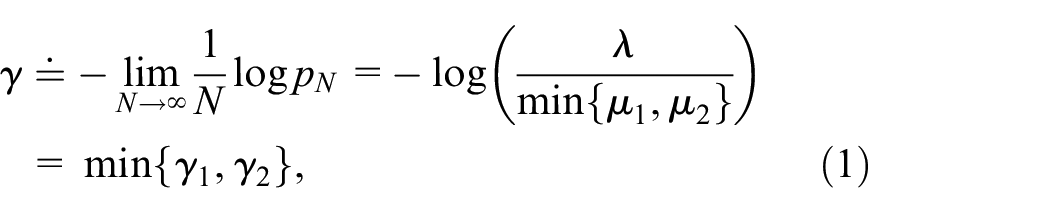
The gradient of Equation (6) is then used as change of measure in Equation (3). It can be expressed as
The functions

which we will refer to in this paper later on. In fact, we will also show that asymptotic efficiency for the change of measure in Equation (3) implies asymptotic efficiency for the change of measure in Equation (8), similar as in the work of de Boer and Scheinhardt. 11 We note that, from an implementation perspective, the change of measure in Equation (8) is preferred over the change of measure in Equation (3), see also Section 3.8.6 in the work of Dupuis et al. 4
2.4. Existing changes of measure
Now that the general ideas of Dupuis et al.
4
and Dupuis and Wang
6
have been presented, we will show the different functions
2.4.1. Change of measure from Dupuis et al. 4
In the work of Dupuis et al.,
4
queue 2 is always considered to be the bottleneck queue because for the probability of interest, the queues are interchangeable. In that paper, a subsolution
and the function
The function
2.4.2. Changes of measure from Dupuis and Wang. 6
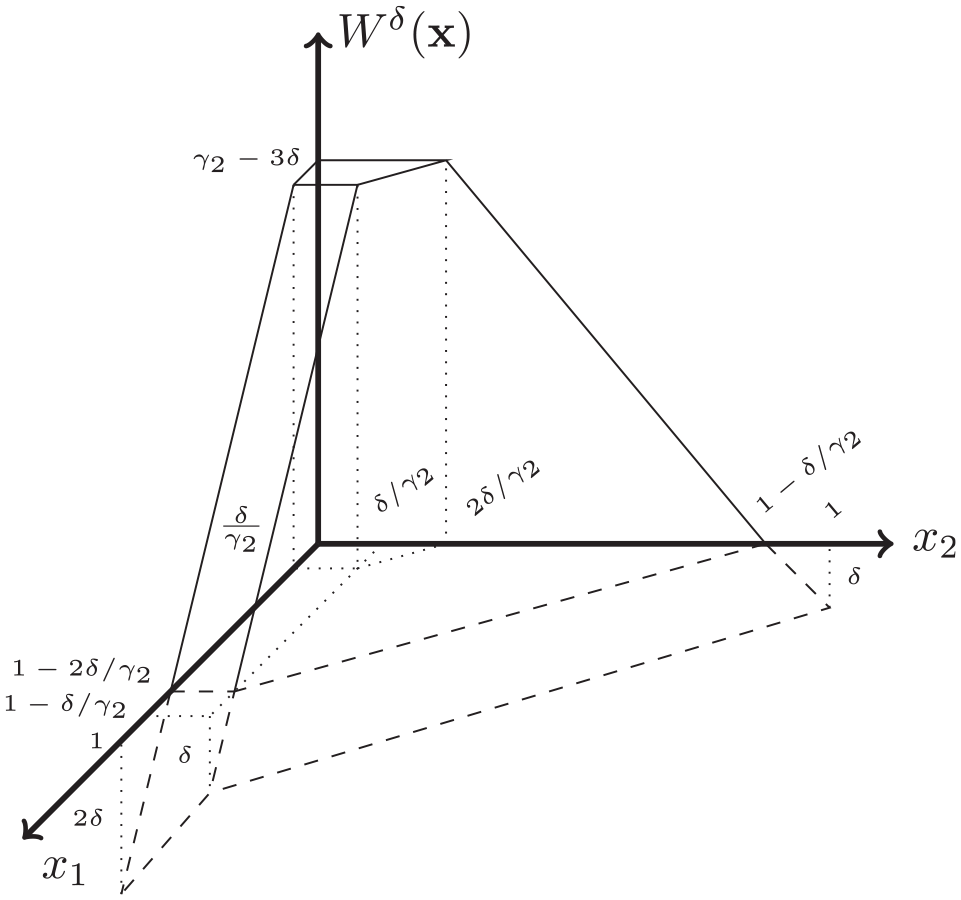
In the work of Dupuis and Wang, 6 the work of Dupuis et al. 4 is extended to Jackson networks and hence in the work of Dupuis and Wang, 6 all queues being the bottleneck queue are considered, as in this paper. Not only the probability that the total number of customers in the system reaches some high level N during a busy cycle of the system is considered in the work of Dupuis and Wang, 6 but the authors also consider buffer overflow in a single queue or in several queues at the same time. If we consider a two-node tandem queue with queue 2 being the bottleneck queue, we find that the following four functions are used in Dupuis and Wang 6 :
and
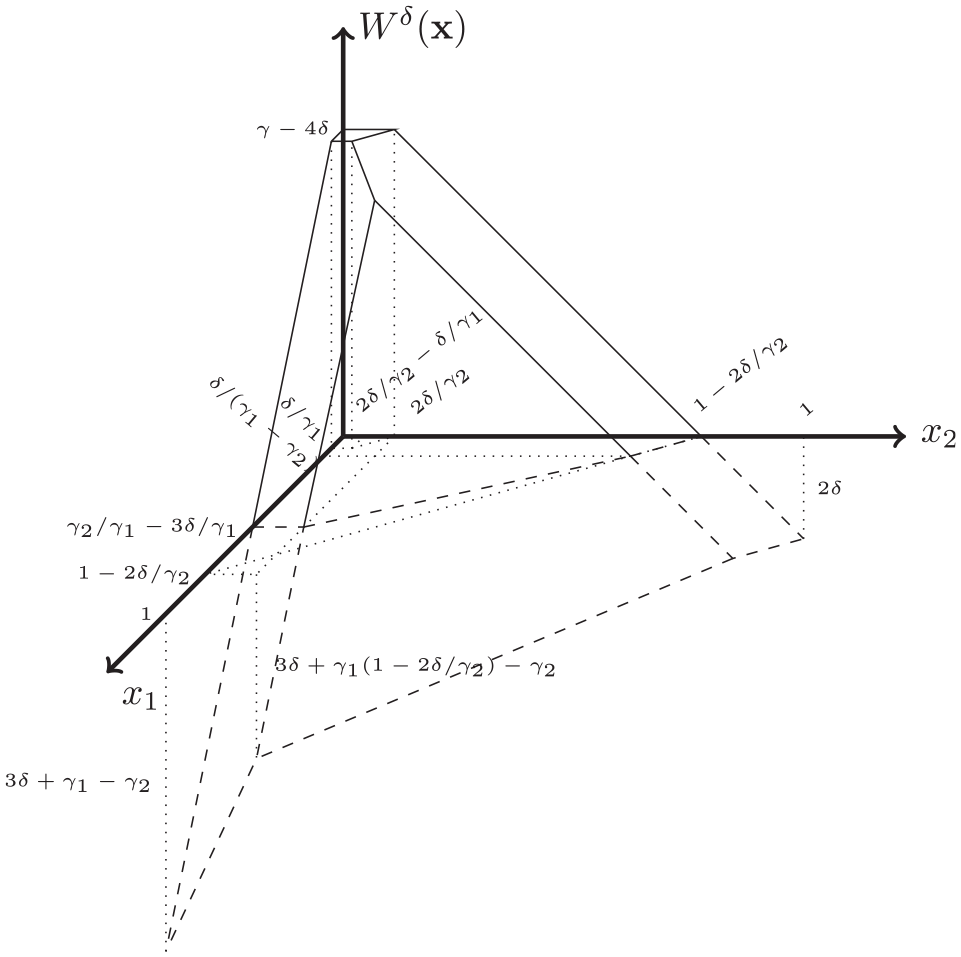
The function
In the work of Dupuis and Wang,
6
the authors do not explicitly mention by which constant
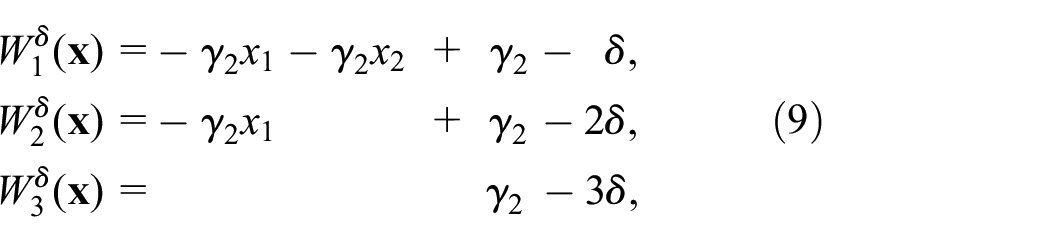
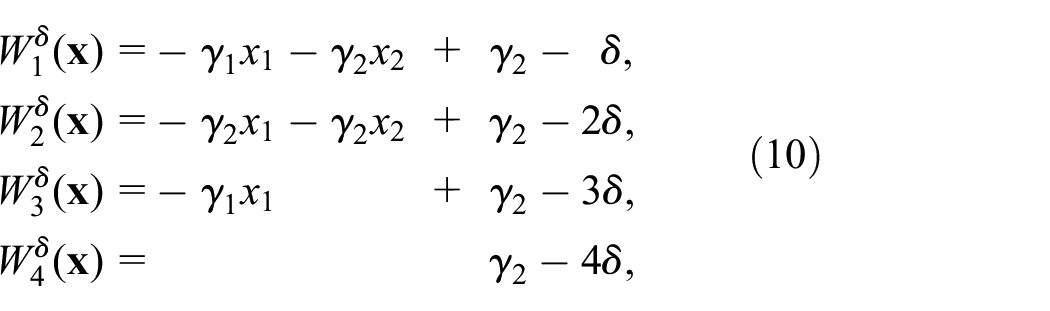
Since there is no limitation to queue 2 being the bottleneck queue in Dupuis and Wang, 6 we also present the result from Dupuis and Wang 6 when queue 1 is the bottleneck queue. The result from Dupuis and Wang, 6 when queue 1 is the bottleneck queue, is different compared with when queue 2 is the bottleneck queue, even though for the probability of interest both queues are interchangeable. When queue 1 is the bottleneck queue, the following three functions are derived by Dupuis and Wang 6 :
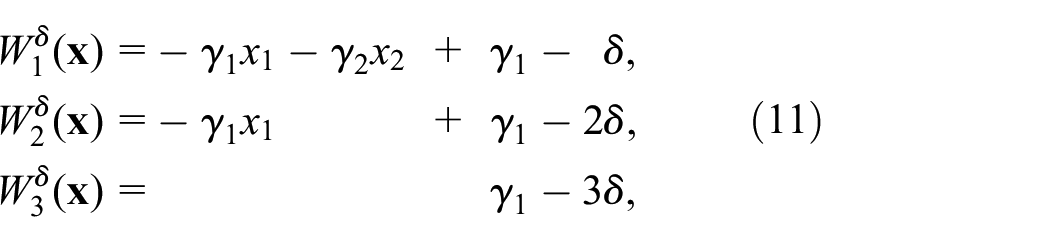
and the resulting function
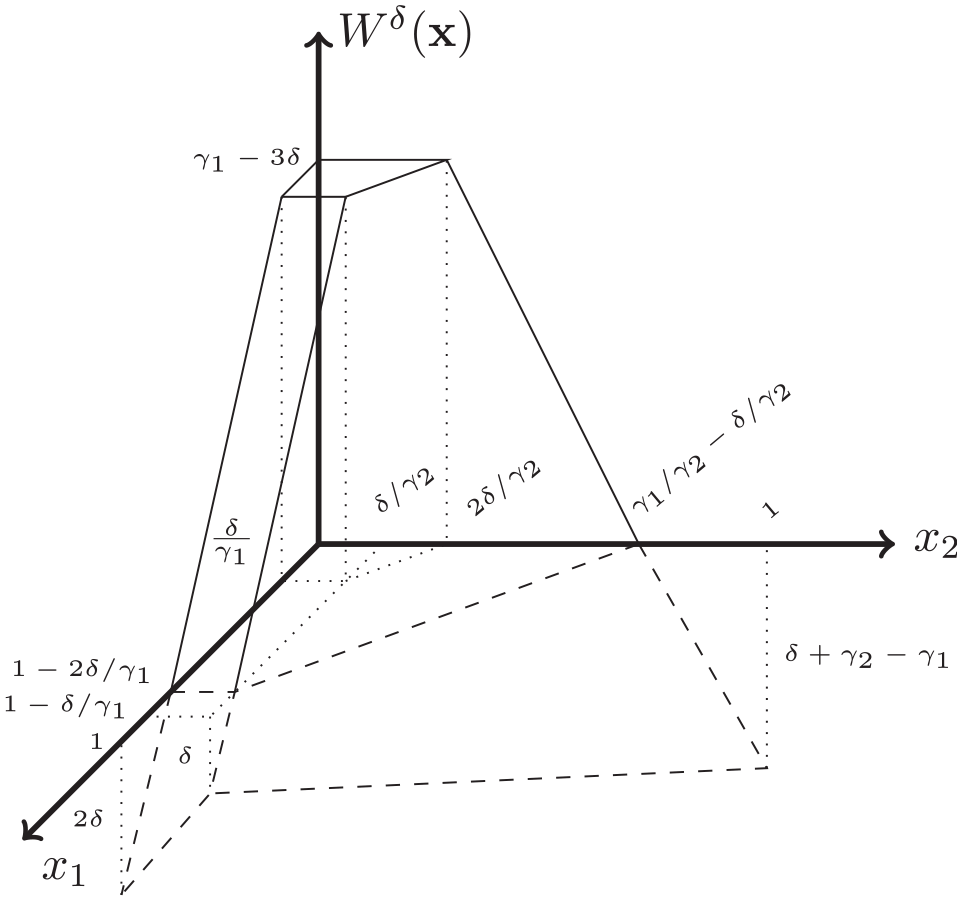
The function
2.4.3. Comparison of the existing changes of measure
In this section, we briefly comment on the similarities and differences of the changes of measure from Dupuis et al.
4
and Dupuis and Wang.
6
We will do so by comparing the functions
When queue 2 is the bottleneck queue, we see from Figures 2 and 3 that along the x2-axis the function
When queue 1 is the bottleneck queue, there is not much to compare. However, since there are already two possibilities for the change of measure based on subsolutions to be asymptotically efficient, and even more to expect, when queue 2 is the bottleneck queue, also the case when queue 1 is the bottleneck queue is studied in Section 4.
3. Sufficient conditions for asymptotic efficiency
Similar to Dupuis et al.
4
and Dupuis and Wang,
6
the construction of the changes of measure in this paper is based on finding appropriate subsolutions
3.1. Main result
Theorem 3.1
Consider a two-node
Proof
We start by showing that under the above conditions the change of measure in Equation (3) is asymptotically efficient, after which it follows that also the change of measure in Equation (8) is asymptotically efficient using a similar argument as in Theorem 2 from de Boer and Scheinhardt. 11
From Equations (2) and (3), it follows that the likelihood ratio of a path
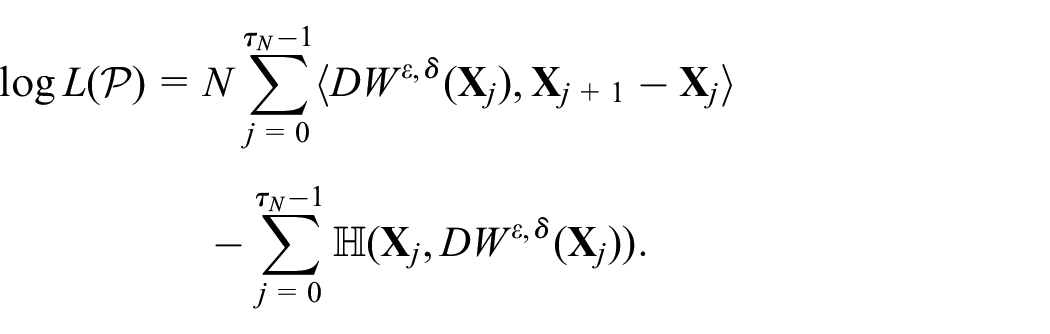
We find, using Equation (7), that for all states

due to concavity of
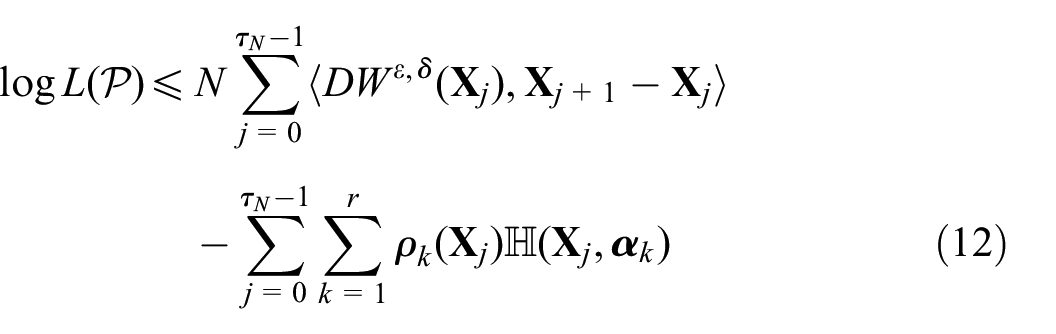

where the last inequality follows from Condition 1.
Similar to Lemma 2 in the work of de Boer and Scheinhardt,
11
also when using r regions, we can obtain the following bound. The idea of this Lemma in de Boer and Scheinhardt
11
is to replace the summation in Equation (13) by
Next, we follow similar steps as in Theorem 1 of the same paper. By combining Equations (13) and (14) we have
where the second inequality follows from Conditions 2 and 3 when
To conclude the proof, we need Lemma 3 from de Boer and Scheinhardt,
11
which states that for any sequence

Thus, taking limits in Equation (15) gives
where the last equation follows using Equation (1),
For the change of measure in Equation (8), we note that similar to de Boer and Scheinhardt, 11 we have
where the inequality follows by concavity of the logarithm and the last equality follows by definition of
Remark 3.1
In Equation (17), we see that we end up with some term

That is, it is impossible to obtain a tighter bound. As a result, we find that for an asymptotically efficient change of measure we need
Remark 3.2
In the sequel, we use a slightly stronger condition than Condition 1 of Theorem 3.1, namely that for each k separately, we have
Remark 3.3
It seems likely that Theorem 3.1 can also be extended to a d-node
3.2. General observations
Now that we have shown under which conditions we obtain an asymptotically efficient change of measure based on subsolutions, it remains to find
In this section, we make some general observations with respect to Conditions 1 and 3 of Theorem 3.1 when considering a two-node
3.2.1. Observations with respect to Condition 1 of Theorem 3.1
We recall that the first condition is
By considering all possibilities for
We start by finding solutions to

In Lemma 3.2, we consider
Lemma 3.2
Suppose
If
If
If
If
Proof
For the first statement, let

where we let
As a result of Lemma 3.2, we can sketch the level set for all
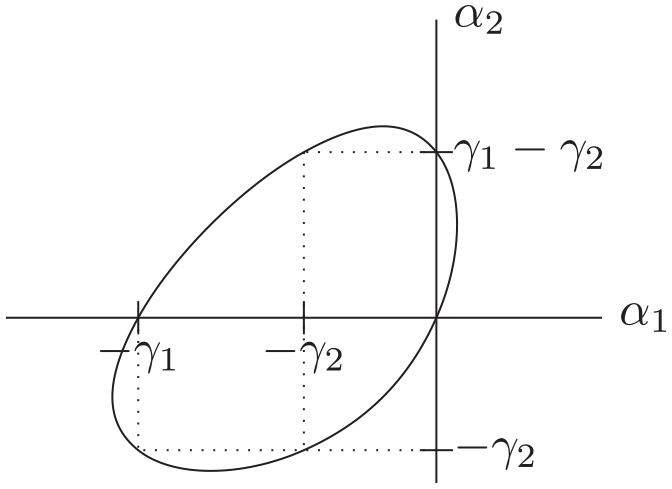
Sketch of the level set for which
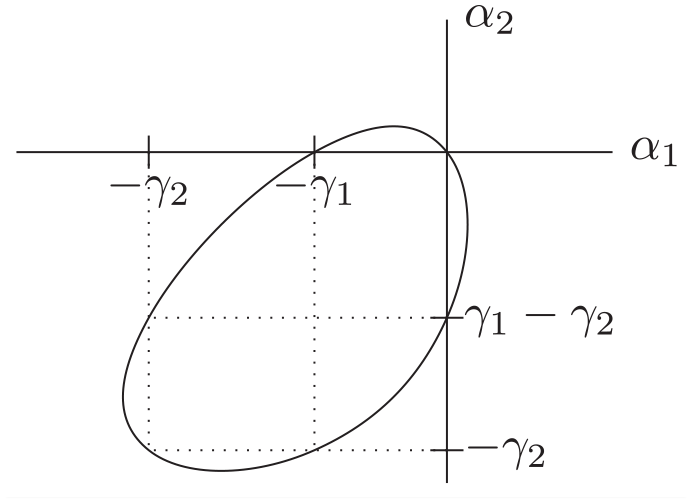
Similar to Figure 5, but when queue 1 is the bottleneck queue (and so
In the following lemma, we consider Equation (19) at one of the boundaries given a certain choice for either
Lemma 3.3
Proof
The statements follow directly by elementary calculus, combined with
We conclude this section with a remark on
for any
3.2.2. Observations with respect to Condition 3 of Theorem 3.1
In Remark 3.1, it is noted that we need

as a sufficient condition to satisfy Condition 3 since
As a result of the observations above, to construct the possibilities for the change of measure, it remains to find
4. Construction of the subsolution
In this section, we construct possible subsolutions, based on the approach mentioned in Section 2.3, that satisfy the conditions in Theorem 3.1 and thus yield an asymptotically efficient estimator. It may not be clear at first sight that the method below results in subsolutions that satisfy all these conditions, since the construction is partly based on intuition. However, we conclude all sections by showing that the conditions are indeed satisfied.
For the two-node
We start using three regions and queue 2 being the bottleneck queue, since this case has been studied most in literature. Afterwards, we consider three regions and queue 1 the bottleneck queue. We conclude this section with four regions, for which we again consider both queue 2 and queue 1 as the bottleneck, respectively. For brevity, when considering four regions, we will only state the result of the construction (which is similar to the construction when having three regions) and show that indeed the conditions in Theorem 3.1 are satisfied.
4.1. Three regions and queue 2 bottleneck
In this section, our starting point is to consider three functions
It turns out that the zero change of measure can be used when both
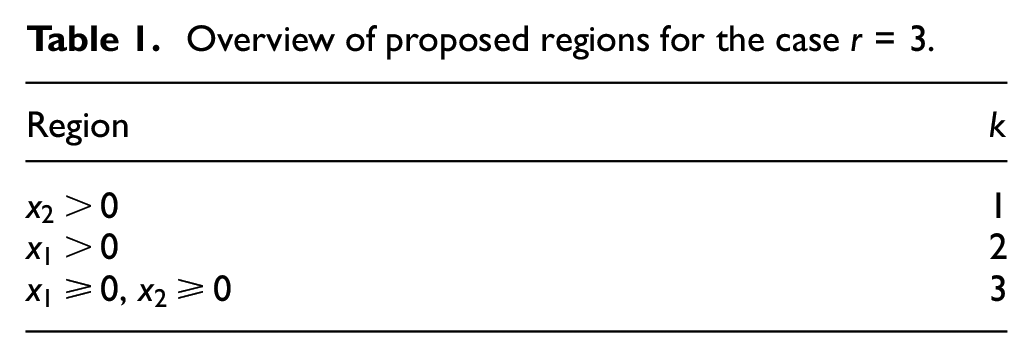
The ordering of the regions that we assign can be found in Table 1, the reasons for this ordering will become clear later in this section.
Overview of proposed regions for the case r = 3.
4.1.1. Finding
To find
Using Condition 1, we can now determine


where we used

to get an asymptotically efficient change of measure based on Theorem 3.1. For future reference, we remark that as a result of this condition on
since
4.1.2. Finding
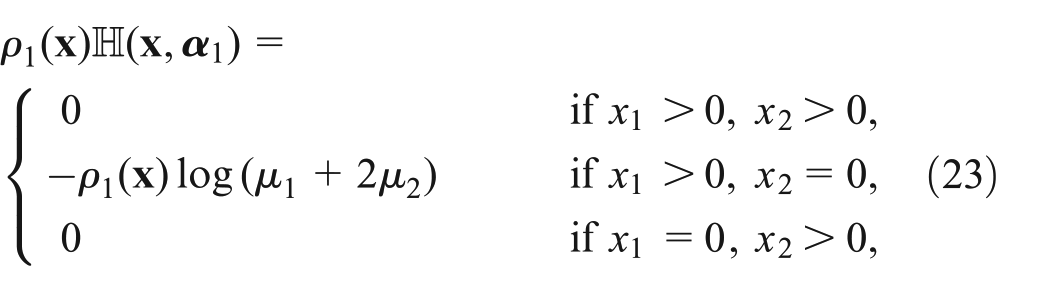
Using the underlying idea of the construction of the subsolution – i.e., the idea to construct several functions, each for different parts of the state space, that are combined through mollification to obtain a classical subsolution – we determine conditions on
To start with, we consider the origin of the state space, i.e.,

Second, we consider the boundary


for all

As a result, we immediately have, for all

for all
The second inequality, Equation (26), is satisfied for all
Combining all conditions on dk, see Equations (24) and (27), we find
Next, we consider the boundary


The first inequality is equivalent to

which unfortunately holds only for

and if

As a result, using Equation (20) for

Since
The second inequality, Equation (30), is satisfied for all
To derive a lower bound on


It is clear that, as we have

Clearly,
since
4.1.3. Summary and proof that all conditions are satisfied
To summarize, we have found the following values for
Possibilities for
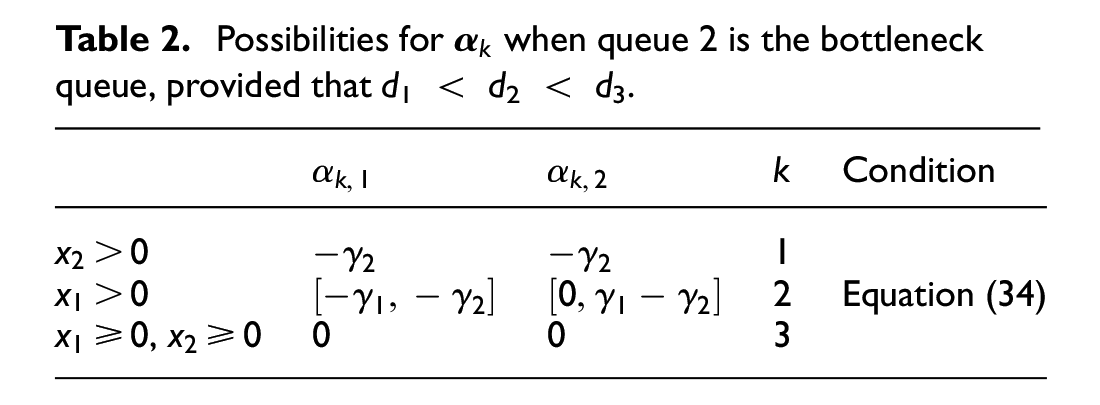
We show that these possibilities for
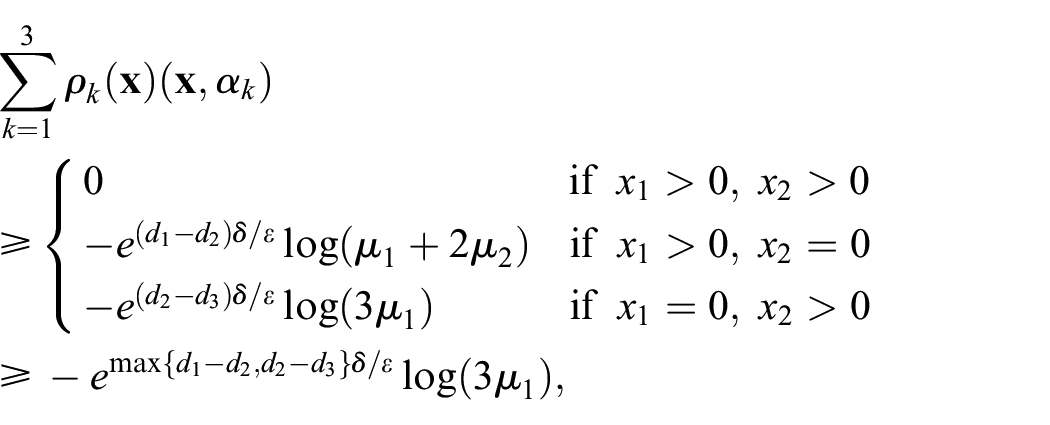
where the last step follows since queue 2 is the bottleneck queue, and thus,

which goes to
4.1.4. Discussion
It is clear that the choice of
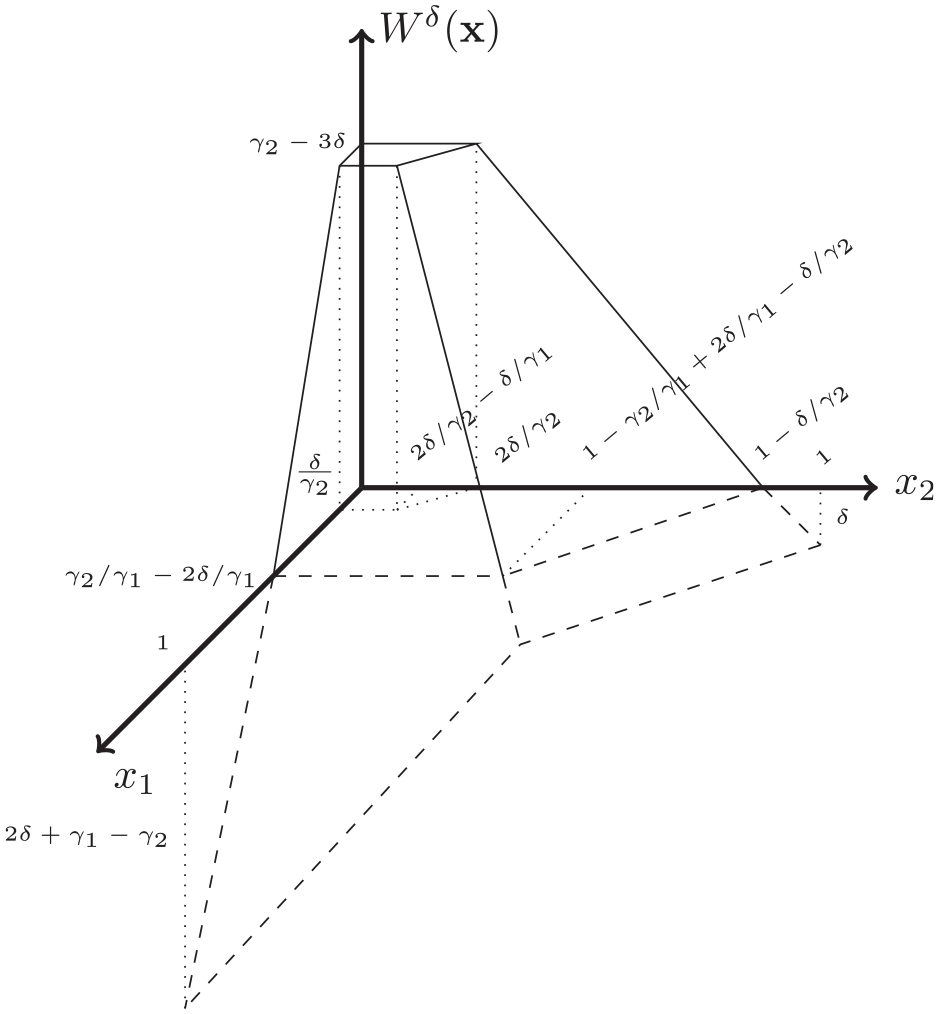
Display of
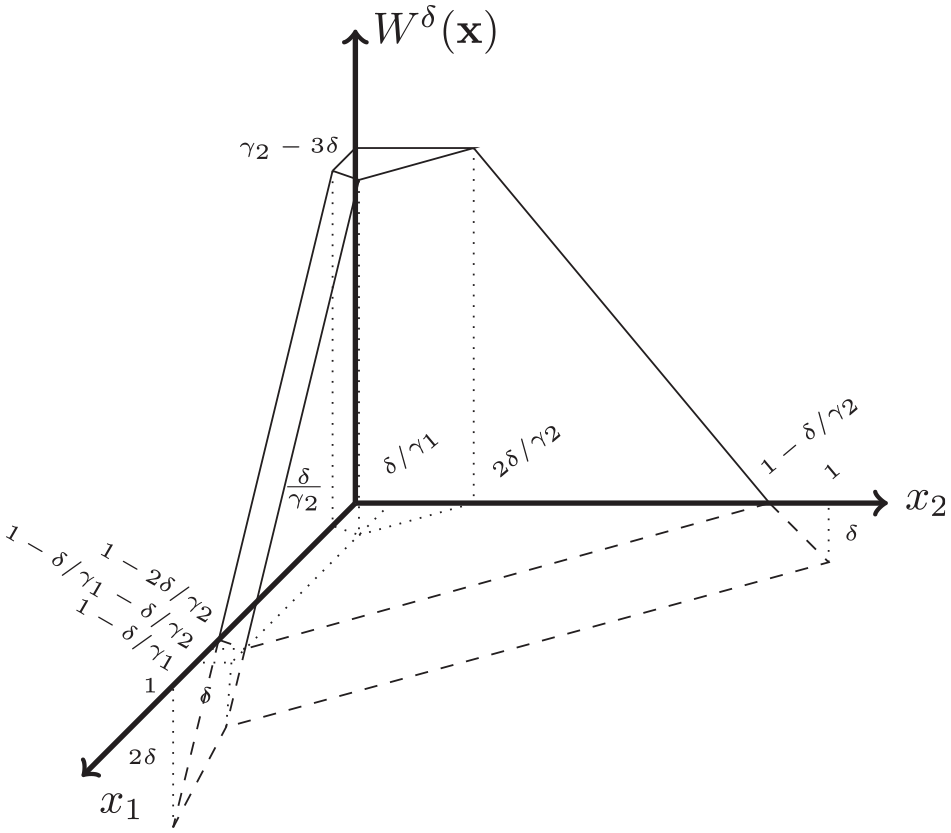
Display of
Choosing
We remark that the change of measure that is used for
4.2. Three regions and queue 1 bottleneck
In this section, we again consider three functions
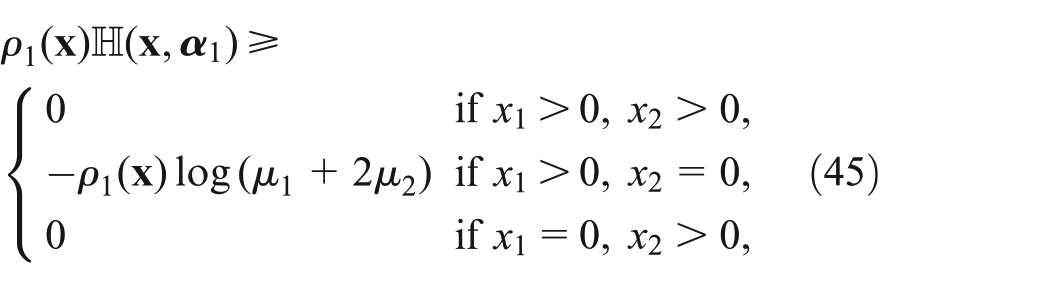
4.2.1. Finding
To find
Next, we use Condition 1 to determine

where we used

For future reference, we remark that as a result of this condition we find, using Equation (18) and
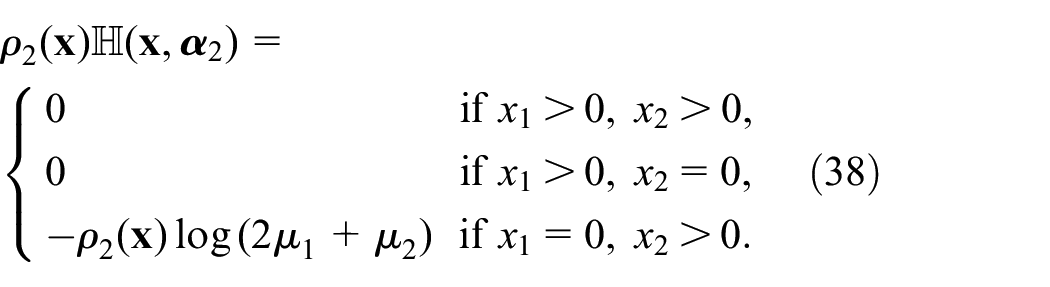
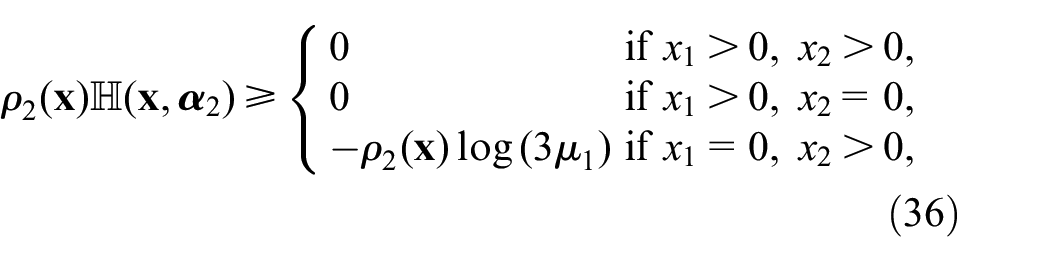
4.2.2. Finding
As in Section 4.1.2, we use the underlying idea of the construction of subsolutions to determine conditions on
By considering the origin of the state space, i.e.,
Next, we consider the boundary

The first condition is satisfied when

since then the right-hand side of the inequality is negative. Similarly to Equation (28) we find

and so the weight factor
For the second condition, see Equation (39), we find that this is satisfied for all
At the boundary

Clearly, both conditions are satisfied when the second condition holds, since d2 < d3. In particular, we need

since d1 < d3, so that both conditions are satisfied for all
To get a tighter condition for

Using the same condition of Theorem 3.1, we also derive an upper bound on

which goes to zero as

To conclude, we derive a lower bound on


where we have used that
since
4.2.3. Summary and proof that all conditions are satisfied
Summarizing, we have found the following values for
Possibilities for
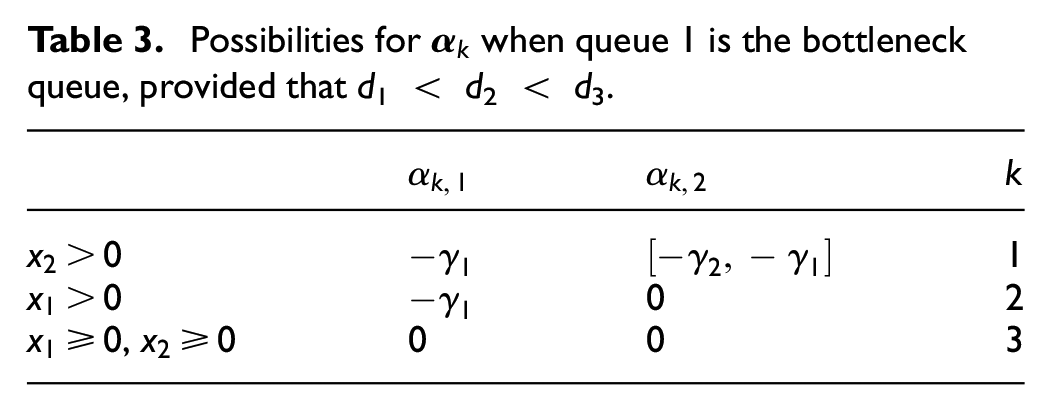
Again, we show by considering all conditions in that theorem, indeed these possibilities for
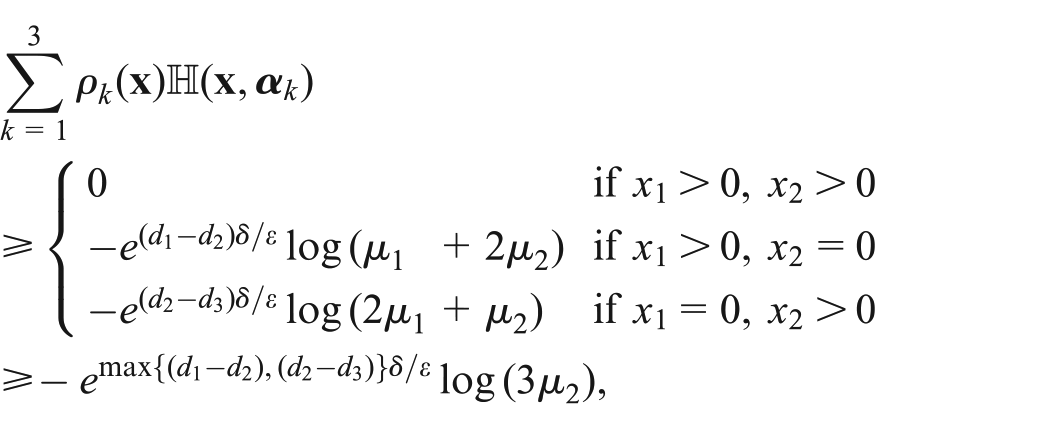
where the final inequality follows since
4.2.4. Discussion
For dk = k for
Display of
As can be seen in Table 3,
When queue 1 is the bottleneck queue, we find that the state-independent change of measure from Parekh and Walrand
1
is only used around
4.3. Four regions and queue 2 bottleneck
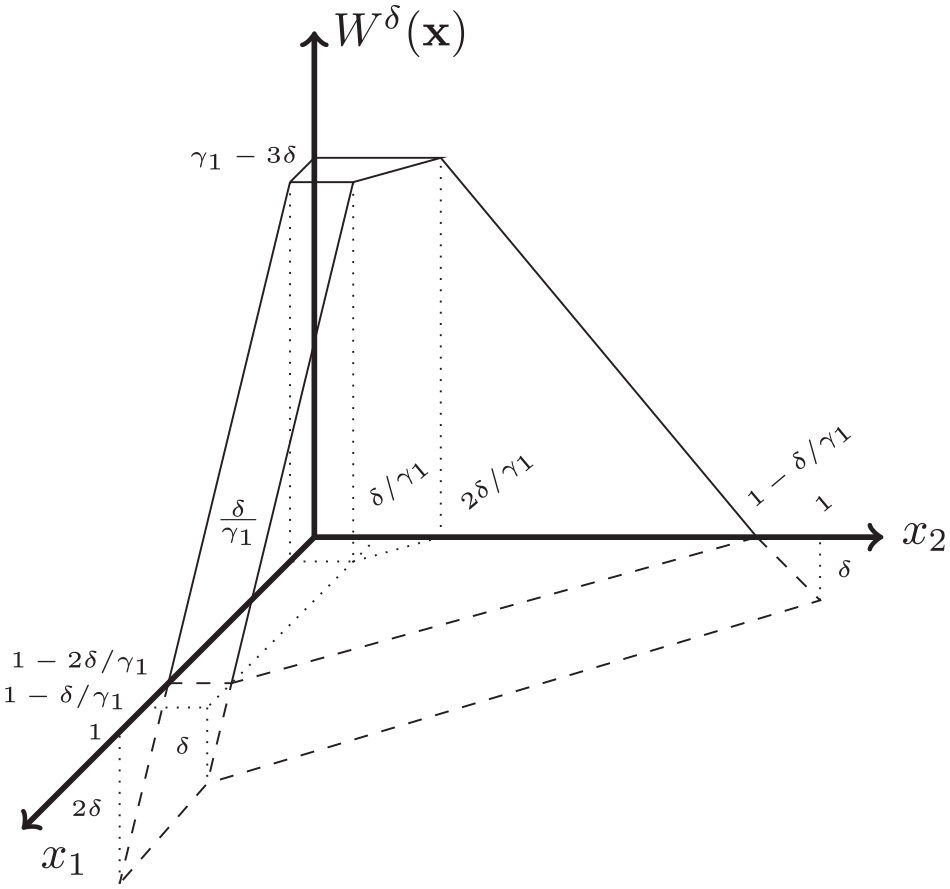
In this section, the starting point is to use four functions
Overview of proposed regions for the case r = 4.
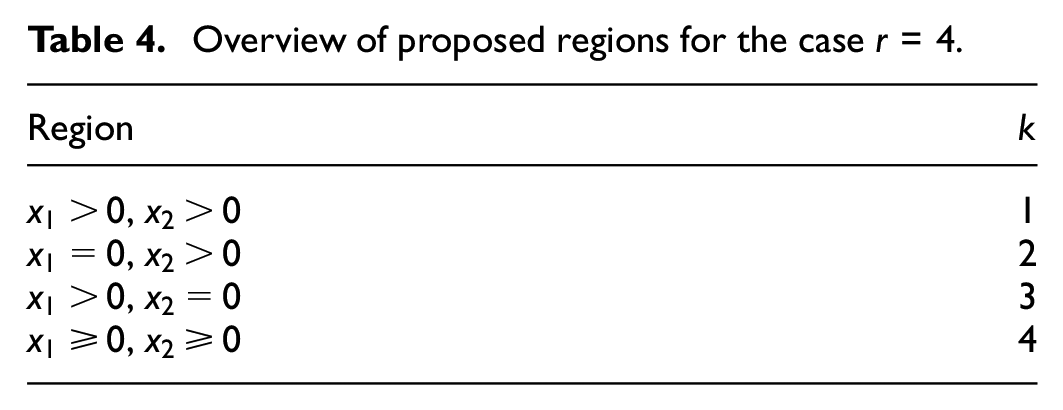
The zero change of measure is used when both
The derivation for using four regions is very similar as when using two regions and, therefore, it is omitted in this paper. A detailed derivation can be found in Buijsrogge. 12
4.3.1. Summary and proof that all conditions are satisfied
We have found the following values for
Possibilities for
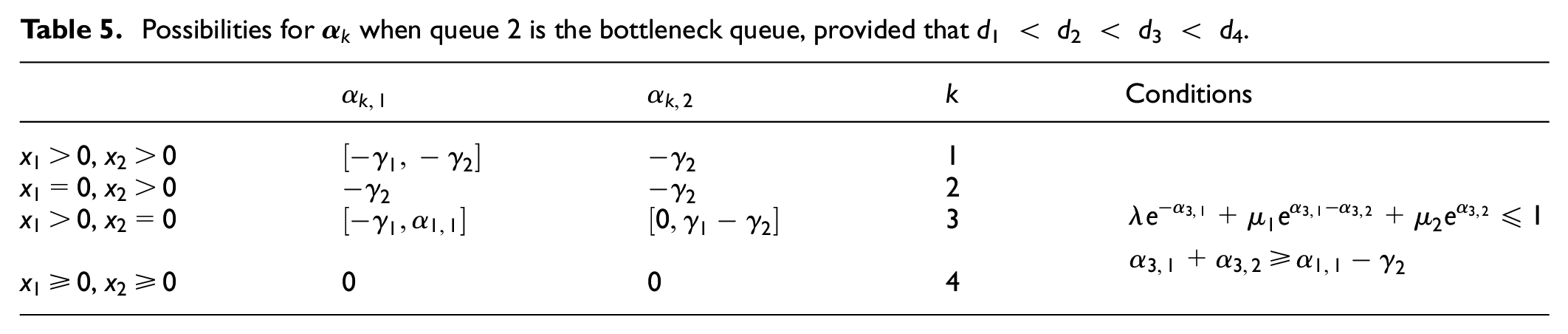
We show that these possibilities for
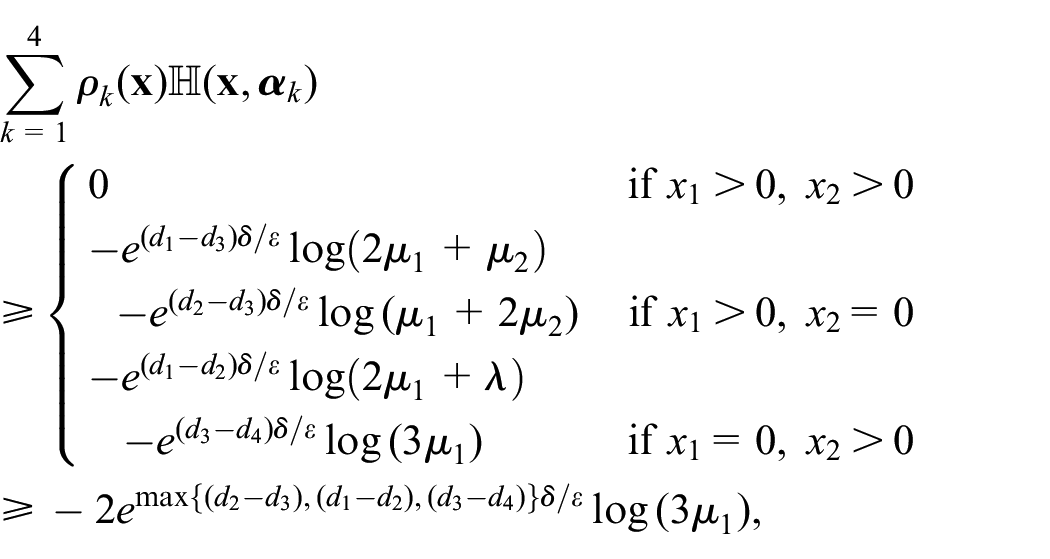
where the first step follows by conveniently substituting the upper and lower bounds on
4.3.2. Discussion
From Table 5, we again see that the change of measure from Parekh and Walrand
1
is used for
From the results in Table 5, it is also clear that we could adapt Figure 3 such that along the
Summarizing, at the
4.4. Four regions and queue 1 bottleneck
In this section, we again consider four functions
4.4.1. Summary and proof that all conditions are satisfied
We have found the following values for
Possibilities for
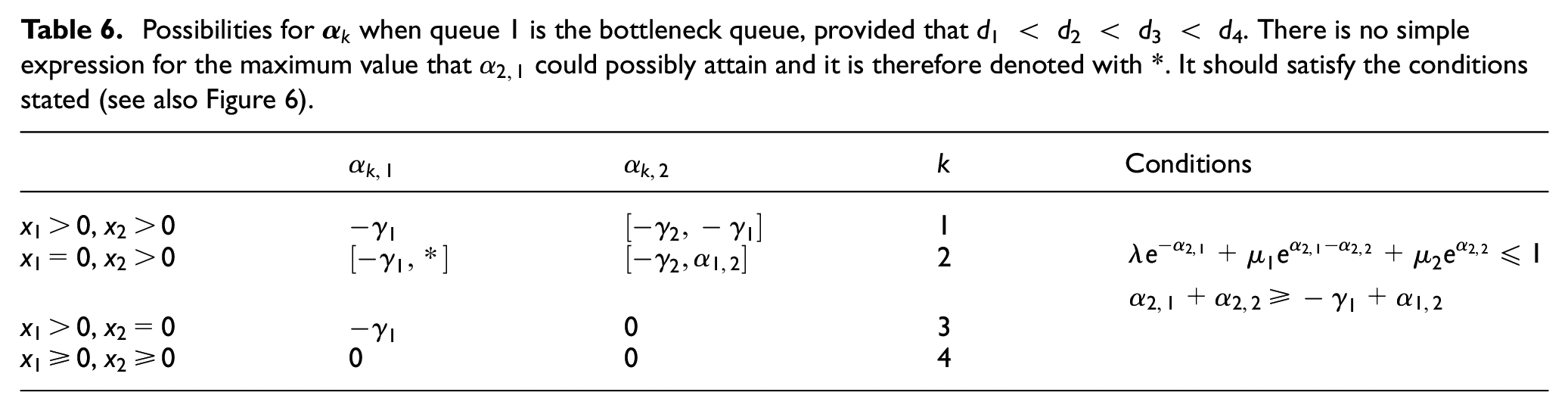
Again, we show by considering all conditions in that theorem, indeed these possibilities for
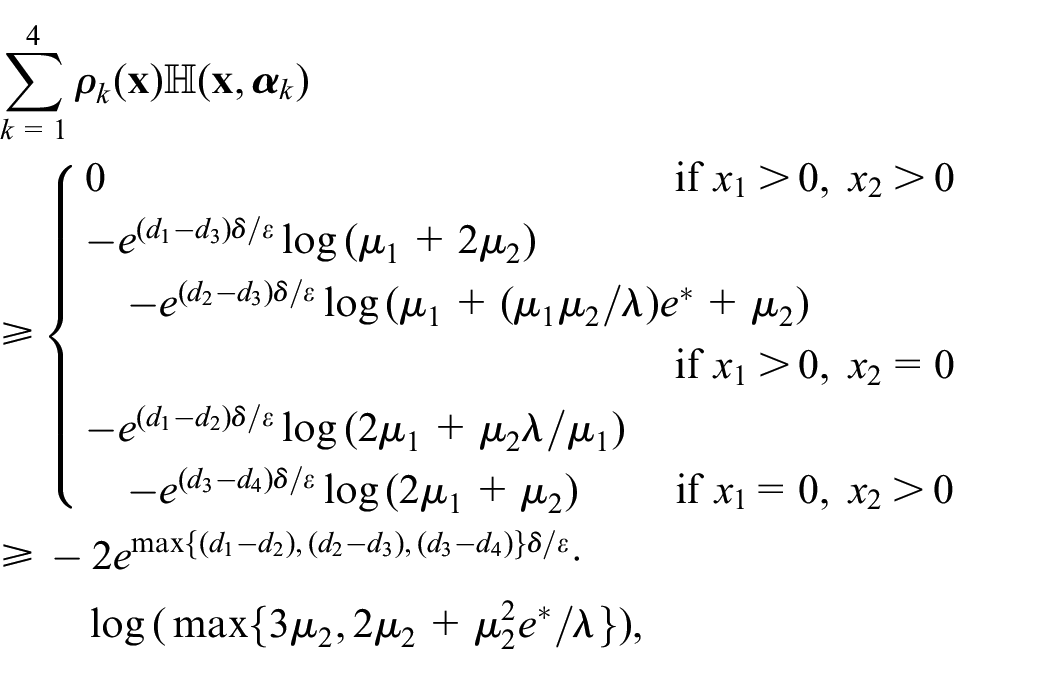
where the first step follows by conveniently substituting the upper and lower bounds on
4.4.2. Discussion
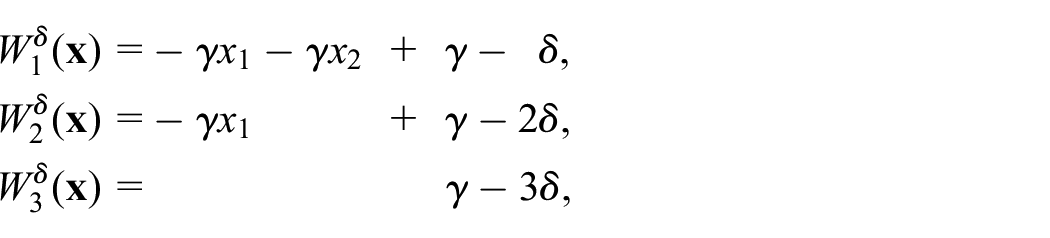
From Table 6, we see that for
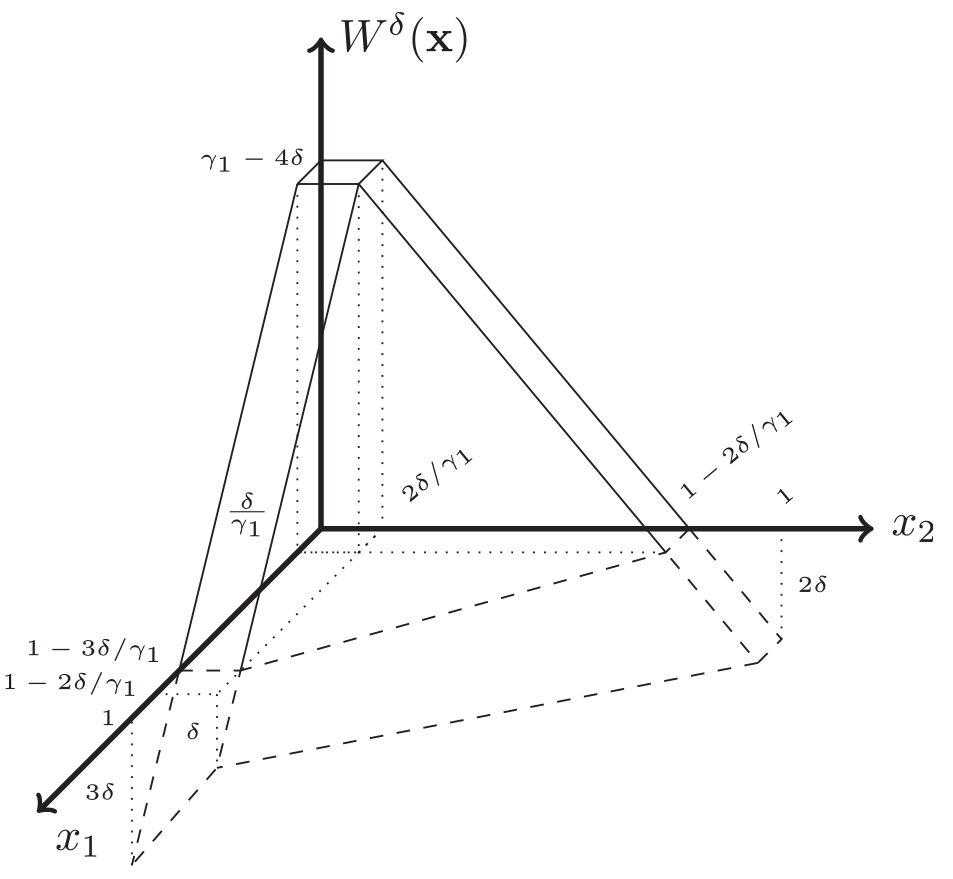
Display of
Comparing with Figure 9, we see that in the area close to the
5. Conclusion
In this paper, we determined sufficient conditions for subsolution-based changes of measure to give asymptotically efficient estimators. As a result, for the two-node
For the case d = 2, we like to highlight one particular change of measure based on the subsolution
where we recall that
From an implementation point of view with respect to subsolutions, in general, it makes sense to use as few regions as possible, i.e., three regions (or d + 1 in the d-node case). However, when the event of interest is not total buffer overflow, but, e.g., individual buffer overflow or simultaneous buffer overflows, it may be more useful to implement the change of measure from Dupuis and Wang 6 that is based on four regions.
Finally, we mention that future work could aim at investigating whether or not the method generalizes to more general models, which we expect to be the case. In the work of Buijsrogge et al., 7 something similar has already been done for non-Markovian tandem queues, but one could also think about more general (non-Markovian) networks, for which we expect similar results to hold.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Netherlands Organisation for Scientific Research (NWO), project number 613.001.105.