
Abstract
Optimization-based motion cueing algorithms based on model predictive control have been recently implemented to reproduce the motion of a car within the limited workspace of a driving simulator. These algorithms require a reference of the future vehicle motion to compute a prediction of the system response. Assumptions regarding the future reference signals must be made in order to develop effective prediction strategies. However, it remains unclear how the prediction of future vehicle dynamics influences the quality of the motion cueing. In this study two prediction strategies are considered. Oracle: the ideal prediction strategy that knows exactly what the future reference is going to be. Constant: a prediction strategy that ignores every future change and keeps the current vehicle’s linear accelerations and angular velocities constant. The two prediction strategies are used to reproduce a sequence of maneuvers between 0 and 50 km/h. A comparative analysis is carried out to objectively evaluate the influence of the prediction strategies on motion cueing quality. Dedicated indicators of correlation, delay and absolute error are used to compare the effects of the adopted prediction on simulator motion. Also the motion cueing mechanisms adopted by the different conditions are analyzed, together with the usage of simulator workspace. While the constant strategy provided reasonable cueing quality, the results show that knowledge of the future vehicle trajectory reduces the delay and improves correlation with the reference trajectory, it allows the combined usage of different motion cueing mechanisms and increases the usage of workspace.
1. Introduction
Motion cueing algorithms (MCAs) are used in driving simulators to provide inertial motion to the user of the simulator. The motion obtained from the vehicle dynamic simulation is adjusted by the MCA to fit the limited workspace of the simulator motion system. To achieve this goal, different algorithms have been developed in the past decades. One of the most commonly used MCAs is known as the classical algorithm.1–3 Classical MCAs are based on filters, where linear accelerations and angular velocities are first scaled and then high-pass filtered to remove constant signal content (washout). In addition, low-pass filters are also used for longitudinal and lateral accelerations, where tilt coordination is adopted to use gravitational acceleration to reproduce sustained accelerations. These algorithms present some limitations. The tuning process is not trivial and it is often subjective. Different approaches have been studied to objectively tune the parameters of classical MCAs by following a specific process 4 or by optimizing a set of dedicated objective metrics of motion cueing quality.5,6 Nevertheless, the results obtained from these techniques can still be improved by further subjective tuning. The tuning process of classical MCAs is specific to the set of maneuvers to reproduce on the motion simulator. Since classical MCAs do not include knowledge of the motion system’s limitation, the tuning process must be repeated if the set of maneuvers changes. Otherwise, the trajectory obtained by the classical MCA could be exceeding the physical boundaries of the motion system. More recently another approach based on optimization has become popular.7–10 Unlike filter-based MCAs, the optimization-based approach uses model predictive control (MPC) to compute an optimal solution, within system limitations, using an internal model of the motion system to predict the future system response.11–14 This algorithm will be referred to here as ‘predictive MCA’. This new approach takes into account motion system limitations and the tuning is achieved with weighting factors on linear and rotational motion cues. The predictive MCA has shown multiple advantages with respect to the classical algorithm, both in terms of workspace usage and subjective evaluation, when the vehicle trajectory is completely known in advance (passive driving). 15 However, other challenges are introduced with the usage of predictive MCA. Compared with the classical MCA, this algorithm requires more computational time to solve an optimization problem at each time step of the algorithm, making it more challenging to adopt for more common driver-in-the-loop (DIL) simulations (active driving). Another aspect to consider is that the predictive MCA requires a future reference of the motion to reproduce on the simulator to compute a prediction of the system response. When using the predictive MCA in DIL simulations, assumptions regarding the future reference signals must be made. Previous studies have already addressed the issue of providing a future reference for the predictive MCA. For example, the vehicle motion recorded in a circuit is used to provide a better reference for future laps, 16 or a neural network is trained using simulated data to predict the future reference motion. 17 However, it remains unclear how the prediction strategies adopted influence the quality of the motion cueing. In this study, two prediction strategies are considered. The first strategy corresponds to the ideal case in which the future motion to be reproduced on the simulator is known, as if it could be perfectly predicted. This cannot be applied for active driving but represents the perfect strategy which is expected to reproduce, at best, the reference motion and therefore it is assumed here as a reference. The second strategy assumes a constant motion as a future reference, ignoring every possible variation from the current status. It can be expected that the results for this strategy will be suboptimal with respect to the first one. The scenario used to compare the results of the two prediction strategies is the reproduction on a motion-based simulator of a sequence of maneuvers in an urban-like environment. The simulations are performed offline and the future reference for the few seconds ahead is passed to the predictive MCA at each time step, as if it would be for a DIL simulation. The simulator motion computed with the considered prediction strategies is analyzed and compared with the reference motion.
The goal of this study is to objectively evaluate the influence of the adopted prediction strategy on motion cueing quality. The analysis carried out should also determine whether it is worth investing in an improved prediction strategy to obtain a better motion cueing quality.
2. Methods
2.1. Motion perception
The main role of the MCA is to reproduce the simulated vehicle motion as accurately as possible for the simulator user. In the process of motion perception, humans use visual, vestibular and proprioceptive organs to detect motion direction and rate of change. The vestibular system is located in the inner ear and consists of semicircular canals and otolith organs, which sense angular and linear motion respectively. More specifically, the otolith organs detect specific forces, which result from summation of acceleration in space and gravity. Thus, the specific forces (

Therefore, humans are unable to discriminate between linear accelerations and the component of gravitational acceleration that occurs when the head is tilted with respect to the gravity vector. 1 This effect can be exploited in motion simulators, allowing to reproduce sustained accelerations by simulator tilt. The use of tilt angles is limited to 20–30 deg (Aubert effect), which limits the maximum possible acceleration simulated via tilt coordination to 0.5 g. 18 The use of tilt coordination generates additional motion in the rotational channels, and in order for this false motion not to be noticed, the tilt rate should be limited to the angular velocity perception threshold. Different values of this threshold can be found in literature; a unique value is difficult to identify given also the subjective nature and the dependency from the simulation scenario (active/passive driving). In this study a value of 3 deg/s is considered.19,20 Humans require additional sensory information (i.e., visual, proprioceptive) in order to discriminate between acceleration and tilt. 21
A vestibular system model is not considered here. In this study the goal of the MCA is to reproduce, on the motion simulator, the specific forces and the angular velocities obtained from a vehicle dynamics simulation. The predictive MCA computes the optimal simulator motion and predicts the associated perceived motion of the driver on the simulator. Vehicle-specific forces and angular velocities are used as a reference motion for the predictive MCA in order to minimize the difference between the motion on the simulator and in the real vehicle.
2.2. Vehicle maneuvers
The maneuvers to reproduce on the motion-based simulators are selected in an urban-like scenario between 0 and 50 km/h. The simulated vehicle performs the following maneuvers:
A: accelerating from 0 to 50 km/h
B: braking from 50 to 0 km/h
CT: constant turn at 50 km/h
DLC: double lane change at 50 km/h
BCTA: braking from 50 to 30 km/h while entering the turn and accelerating from 30 to 50 km/h while exiting the turn
The maneuvers have been selected to explore typical longitudinal, lateral and combined motion scenarios. In particular A and B are purely longitudinal maneuvers, while CT and DLC are purely lateral. In addition, BCTA has been chosen to evaluate the combined longitudinal and lateral dynamics. A description of these maneuvers in terms of maximum accelerations and significant frequency content is given in Table 1. The frequency spectrum of the vehicle motion is computed and the maximum significant frequency of each maneuver is considered as the frequency above which the amplitude of the signal’s spectrum is below 10% of its maximum. The vehicle dynamic simulations have been performed with a time step of 1 ms using CarSim™ (Mechanical Simulation Corporation, Ann Arbor, MI, United States). The selected vehicle was a mid-size sedan and it was autonomously driven over a predefined path at a controlled speed. The simulation was performed offline and the results have been filtered to remove the high frequency content of the vehicle motion using a zero-phase low-pass 4th-order Butterworth filter with cut-off frequency of 12.6 rad/s.
Maximum longitudinal acceleration (
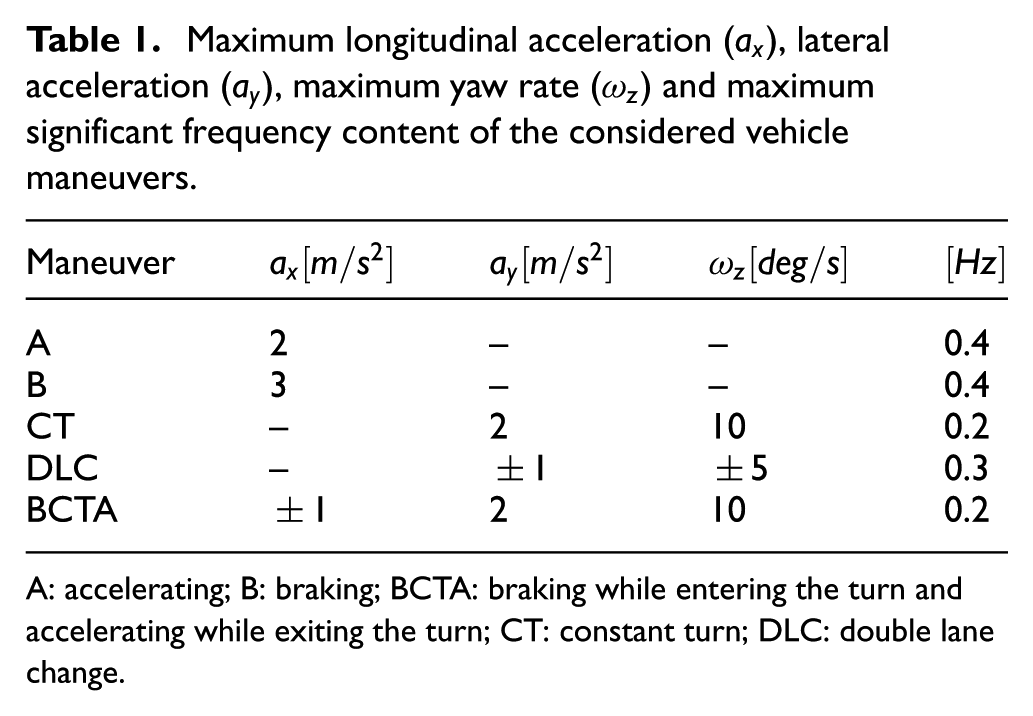
A: accelerating; B: braking; BCTA: braking while entering the turn and accelerating while exiting the turn; CT: constant turn; DLC: double lane change.
2.3. Predictive MCA
The MCA adopted in this study is based on MPC. This advanced control technique uses a simplified model of the system under control (i.e., motion system used in dynamic simulators, to predict the future system’s response and optimize the control action to achieve optimal tracking performances within system limitations). The motion system considered for this study is a six degrees of freedom (DOF) hexapod 22 with a linear actuator stroke of 0.533 m and resulting single DOF limits reported in Table 2.
Motion system single DOF limits.
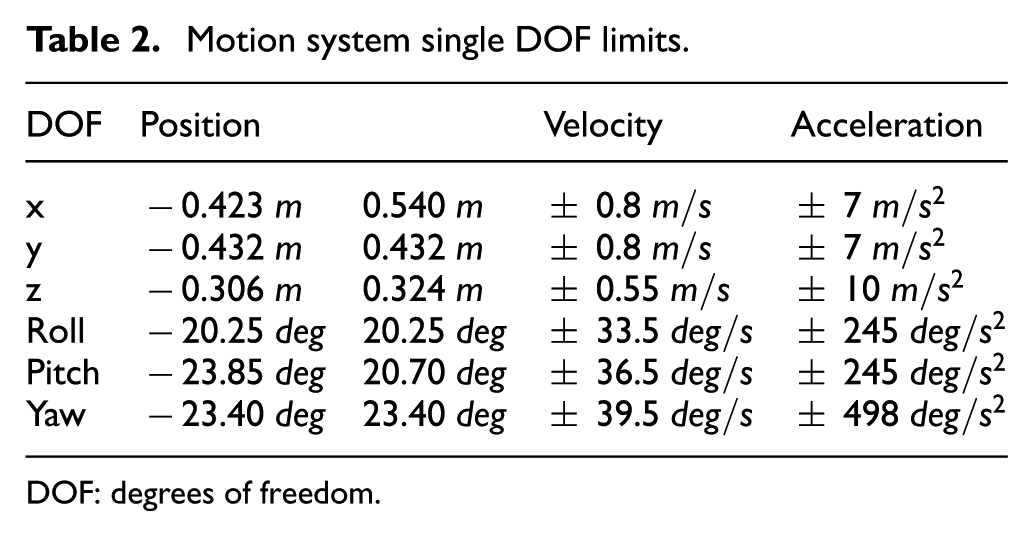
DOF: degrees of freedom.
In order to define the equations of motion of the considered motion system, the following frames of reference are defined:
Inertial frame (IF): fixed to the ground and placed at the center of the hexapod fixed base
Platform frame (PF): placed at the center of the hexapod moving base
Head frame (HF): positioned at the head center of the simulator user
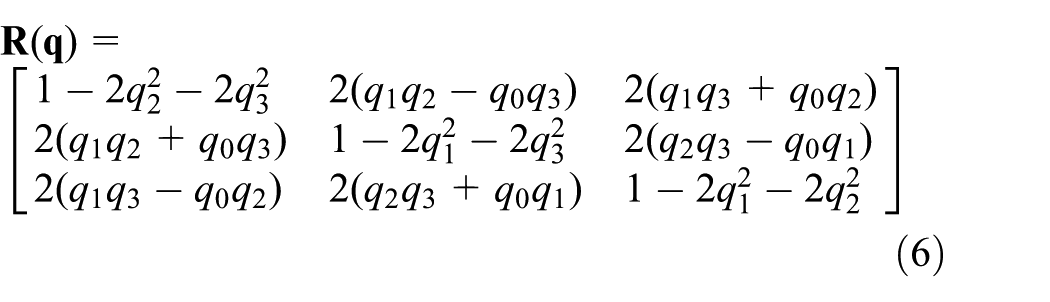
The non-linear equations of motion of the system have been derived, considering the moving platform as a single rigid body with mass, m, and inertia tensor,
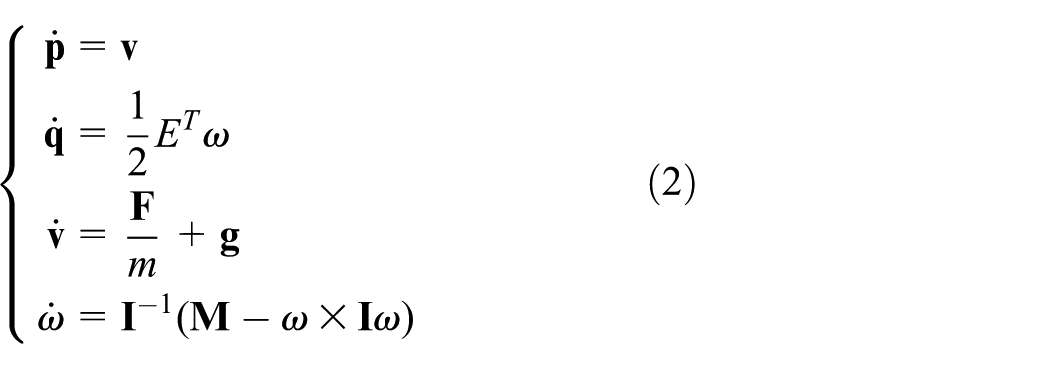
with,

where,
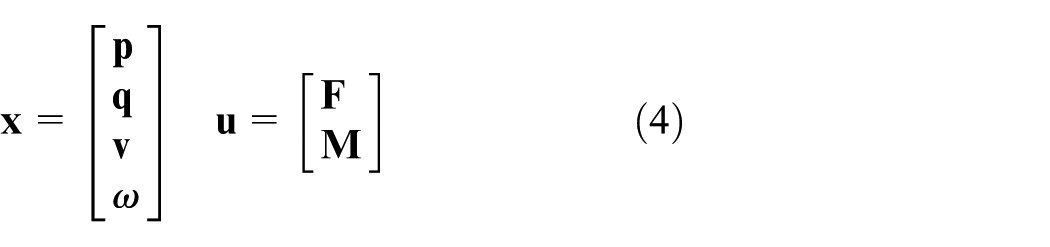
In order to proceed to the full problem statement, the state vector
The system is also subject to constraints, and the MPC allows their inclusion in the optimization problem. As a result, the computed motion trajectory will be optimized while still remaining within system limitations.
The main physical constraint comes from the system’s actuators, which are limited within a certain range of motion. This limitation is expressed as an inequality constraint, where the actuator length is bounded between minimum (

where,
The constraint (Equation 5) is linearized with respect to the state vector as follows:

where,
Together with the actuators’ length constraint, the single DOF motion limitation has also been included in the optimization problem. This constraint somewhat reduces the usable platform workspace, but was considered anyway for extreme caution.
As introduced in Section 2.1, vehicle linear accelerations and angular velocities are considered as the target reference for the MPC controller. The aim of the controller is to reproduce the perceived motion as would occur in the real vehicle, but keeping the simulator motion within its physical limitations. The output function expresses the perceived motion in terms of specific forces (

Next, the same quantities can be expressed in HF by means of the rotation matrix from PF to HF (

As a result, the system output vector

The system’s equations of motion and output equations are then discretized and converted to a discrete time dynamic model using the direct multiple shooting method. 24
The complete non-linear constrained optimization problem is formulated as follows:
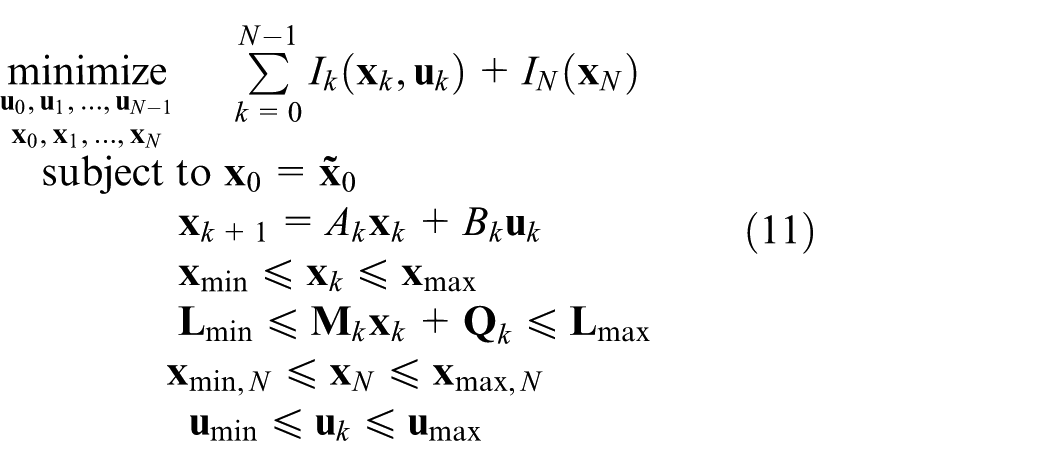
With
The MPC controller solves this problem at each time step. The implementation has been done in Matlab (The MathWorks, Inc., Natick, MA, United States) and the quadratic programming problem is solved by a separate solver (qpOASES 25 ).
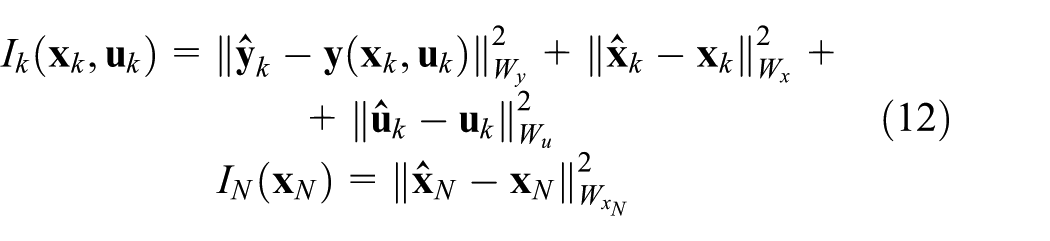
The optimization problem in Equation 11 is defined to minimize the cost function expressed by the two terms
2.3.1 Prediction strategies
The first prediction strategy considered for this study is the ideal strategy that is able to predict with perfect accuracy the future vehicle motion. This strategy will be referred to here with the name oracle (due to its ‘prophetic’ capabilities in predicting the future 26 ). Clearly, this strategy cannot be adopted in an active driving simulation but it is considered as a reference to evaluate the best possible motion cueing quality achievable with the predictive MCA. In order to implement the oracle strategy, linear accelerations and angular velocities resulting from the vehicle dynamic simulations must be known a priori. At each time step, and for the length of the prediction horizon, the corresponding signals are extracted from the fully known motion and provided to the predictive MCA.
The second strategy adopted in this study does not consider any assumptions on future vehicle behavior and, at each time steps, simply holds the current value of linear accelerations and angular velocities that results from the vehicle simulation. This strategy will be referred to here as constant. Contrary to the oracle, this strategy can be adopted for active driving simulation, but the resulting motion cueing quality is expected to be lower.
2.3.2 Prediction horizon length
An important aspect of the future prediction is given by the length of the prediction horizon. The further the algorithm can see in the future, the sooner it will respond to a future change. On the other hand, a longer prediction horizon would result in a very high computational cost. In a previous study
27
a genetic algorithm was adopted to optimize the length of the control and prediction horizon of the MPC. In another study
28
a model was developed to evaluate the relation between prediction horizon length and performance of the predictive MCA in terms of a reduction of cost function. In the last study, the cost value obtained with a certain prediction length

Where a and k are characteristic parameters depending on the considered scenario. The results showed that for an urban-like scenario the characteristic time a for which the cost is twice the value with infinite horizon is 3.3 seconds and the cost decrease factor k is equal to 2. In this study a prediction horizon of 5 seconds is considered, which is roughly 1.5 times the characteristic time and would result in a cost value of approximately 1.4 times the cost with infinite horizon. The choice of 5 seconds of prediction, together with the selected time step of 0.1 seconds, results in an horizon length, N, equal to 50 and a total number of control parameters to optimize equal to 300. The implementation adopted in this study does not allow real time performances for a problem of this size. In order to improve the performance to real-time, a different implementation could be adopted using more efficient programming language and/or optimization algorithm.
2.3.3 Weighting factor optimization
The motion cueing quality that can be achieved with the predictive MCA depends on the accuracy of the predicted motion that is provided to the MPC algorithm at each time step. The MPC algorithm aims at reproducing the given reference signals where the tracking performances are influenced by the weighting factors associated with each motion channel. In the considered problem formulation, the weighting factors associated with the perceived motion are the six non-zero terms of the diagonal matrix

Initial and optimized weighting factors on specific forces and angular velocities of the predictive MCA.
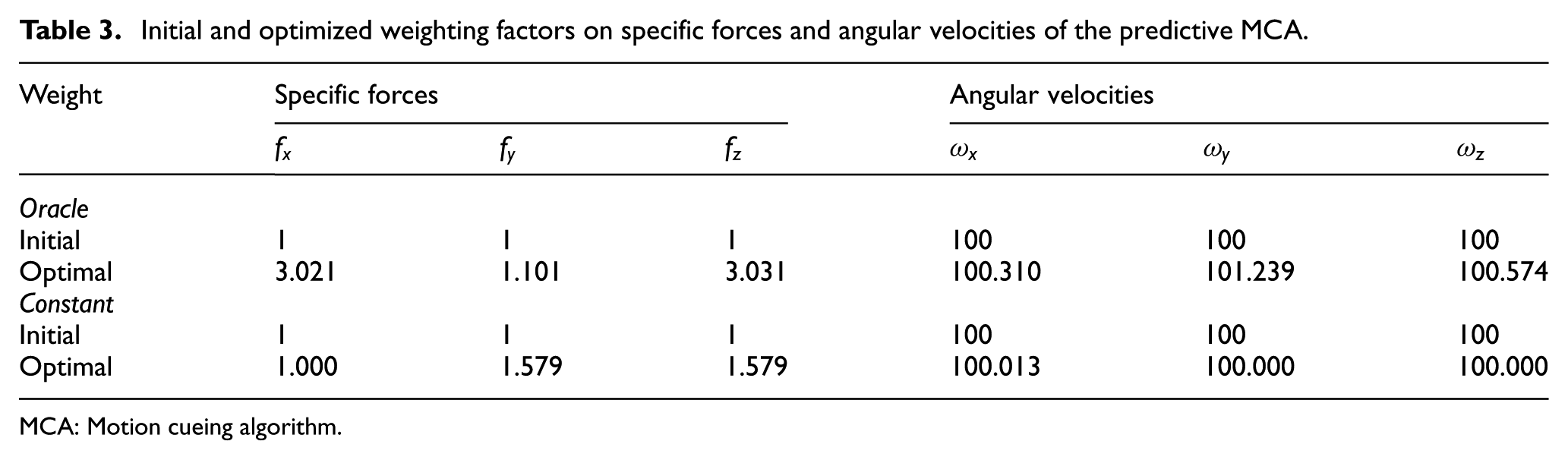
MCA: Motion cueing algorithm.
A wider optimization loop is defined in order to find the optimal value of
2.4. Dependent variables
The influence of the prediction strategy on the simulator motion is analyzed in three different aspects: (1) analysis of motion quality indicators, (2) analysis of cueing mechanism usage (3) analysis of workspace usage.
2.4.1. Motion quality indicators
A previous study 30 categorizes motion cueing errors into three types: false cues, scaling or missing cues and phase errors. Each of these cueing errors influences the motion cueing quality in a different way. In order to account for these influences when analyzing the results of the predictive MCA, it is necessary to identify some metrics to quantify the effects of each error.
Shape and scaling errors have been addressed in previous studies,31,32 where scaling factors were adopted for the MCA and used to separate the contribution of the scaling from the shape error. In another study, 33 a more general approach was introduced based on signal correlation to analyze the error introduced only by the signals’ shape. The detection threshold of phase errors introduced by the MCA have been also studied 34 and in particular for pitch and yaw motion a phase error threshold of 22 deg/s was identified. 35 A complete knowledge of these phase error thresholds for every motion channels would give the possibility to evaluate what is the maximum acceptable signal delay that will not be perceived. Unfortunately, these values are not yet known.
In a more recent article, 36 dedicated indicators for motion signal correlation, scaling and delay were defined. These indicators have been proven to correlate well with the subjective cueing quality measured in a human-in-the-loop experiment and they will be considered here to study the impact of the prediction strategy on motion cueing quality. The indicators have been slightly modified with respect to their original definition 36 and are described in detail in the following paragraphs.
2.4.2. Motion cueing mechanisms
The analysis of the indicators gives a very important and quantifiable measurement of motion cueing quality. Similarly to a previous study, 15 an analysis of motion cueing mechanisms provides insight to understand how the cueing quality is affected by the prediction strategy. The motion cueing mechanisms that will be analyzed in this study are presented below.
2.4.3. Workspace usage
A crucial limitation for motion simulators is the limited workspace available. The predictive MCA offers the possibility to include the system’s constraints in the optimization problem and therefore it makes optimal usage of the available workspace. When changing the adopted prediction strategy, a different motion cueing quality is expected, together with a different usage of the simulator workspace. To determine whether the differences in motion cueing quality between prediction strategies are related to a more effective usage of simulator workspace, a dedicated analysis will be performed. In particular, the use of the actuators’ length and motion envelope will be analyzed and compared.
The length of each actuator is computed for the full sequence of maneuvers. In order to analyze how the prediction strategy makes use of the actuators’ length, the interquartile range is used. This quantity is normally adopted in statistics as a measure of variability and it is computed as the difference between the 75th and 25th percentiles. 37 In this study it will be assumed that a higher interquartile range would represent a wider use of the full actuator length and therefore a more effective usage of the simulator workspace.
Another aspect to notice is the use of the motion system workspace. In this study, the motion obtained for the full sequence of maneuvers with the considered prediction strategies will be analyzed separately for displacement and orientation coordinates. For the analysis of the linear displacement, the sequence of x-y-z coordinates can be visualized as a set of points in the Euclidean space. The convex hull of the sets of points obtained by each prediction strategies is computed and its volume calculated. The obtained volumes can be compared with each other and with the complete position workspace, which is the x-y-z space that can be reached with every possible orientation of the motion system. A similar analysis is performed for the orientation coordinates. The roll-pitch-yaw coordinates obtained by each prediction strategy for the entire sequence of maneuvers is used to compute the convex hull. The volumes computed are again compared with each other and to the complete orientation workspace, which is the roll-pitch-yaw space that can be reached with every possible position of the motion system. In this analysis it is inferred that a higher volume of the computed convex hull indicates a larger usage of the simulator workspace.
3. Results
To compare the results obtained by the MCA with different prediction strategies, the motion quality indicators are computed and analyzed in Section 3.1. The use of different motion cueing mechanisms is presented in Section 3.2. Finally, the influence of the adopted prediction strategy on simulator workspace usage is shown in Section 3.3.
3.1. Motion quality indicators
The first analysis of the resulting simulator motion depending on the adopted prediction strategy is carried out using the indicators defined in Section 2.4.1. To clarify the analysis, the maneuvers involving similar dynamics are grouped together in three sets defined as follows:
Longitudinal dynamics: acceleration (A) and braking (B)
Lateral dynamics: constant turn (CT) and double lane change (DLC)
Combined longitudinal/lateral dynamics: braking while entering the turn and accelerating while exiting the turn (BCTA).
For each maneuver set, the most relevant motion channels are considered for the calculation of the indicators.
3.1.1. Longitudinal dynamics
For the longitudinal dynamic maneuvers, the most relevant motion channels are longitudinal acceleration and pitch rate.
The results for the acceleration maneuver are shown in Figure 1. The longitudinal acceleration obtained with the oracle strategy is very similar to the vehicle motion, while the constant strategy fails to reproduce the sustained acceleration at the beginning of the maneuver resulting in a missing cue, and at the end of the maneuver providing a false acceleration cue. The CC indicator reflects the differences in the signal shape. The CC is 0.95 for the oracle strategy while it is 0.87 for the constant. The distorted acceleration signal obtained with the constant strategy also results in a delayed cue. In fact, the obtained DI value for the constant strategy is 0.86 seconds, while the DI for the oracle is 0.11 seconds. In terms of absolute difference, the acceleration obtained with the oracle is very close to the reference motion and therefore the AD is 0.10. For the constant strategy, due to the different shape of the signal, the difference with the reference is higher, resulting in a value of AD of 0.33. Regarding the pitch rate, the constant strategy keeps the resulting signal at zero until the beginning of the maneuvers, then the angular velocity rapidly increases above the perception threshold. The oracle strategy, knowing the future reference in advance, starts using the angular velocity before the beginning of the maneuvers, resulting in a smoother signal which barely passes the perception threshold. The quantification of this effect is provided by the AD indicator, which is 0.17 for the oracle strategy and 1.56 for the constant strategy.
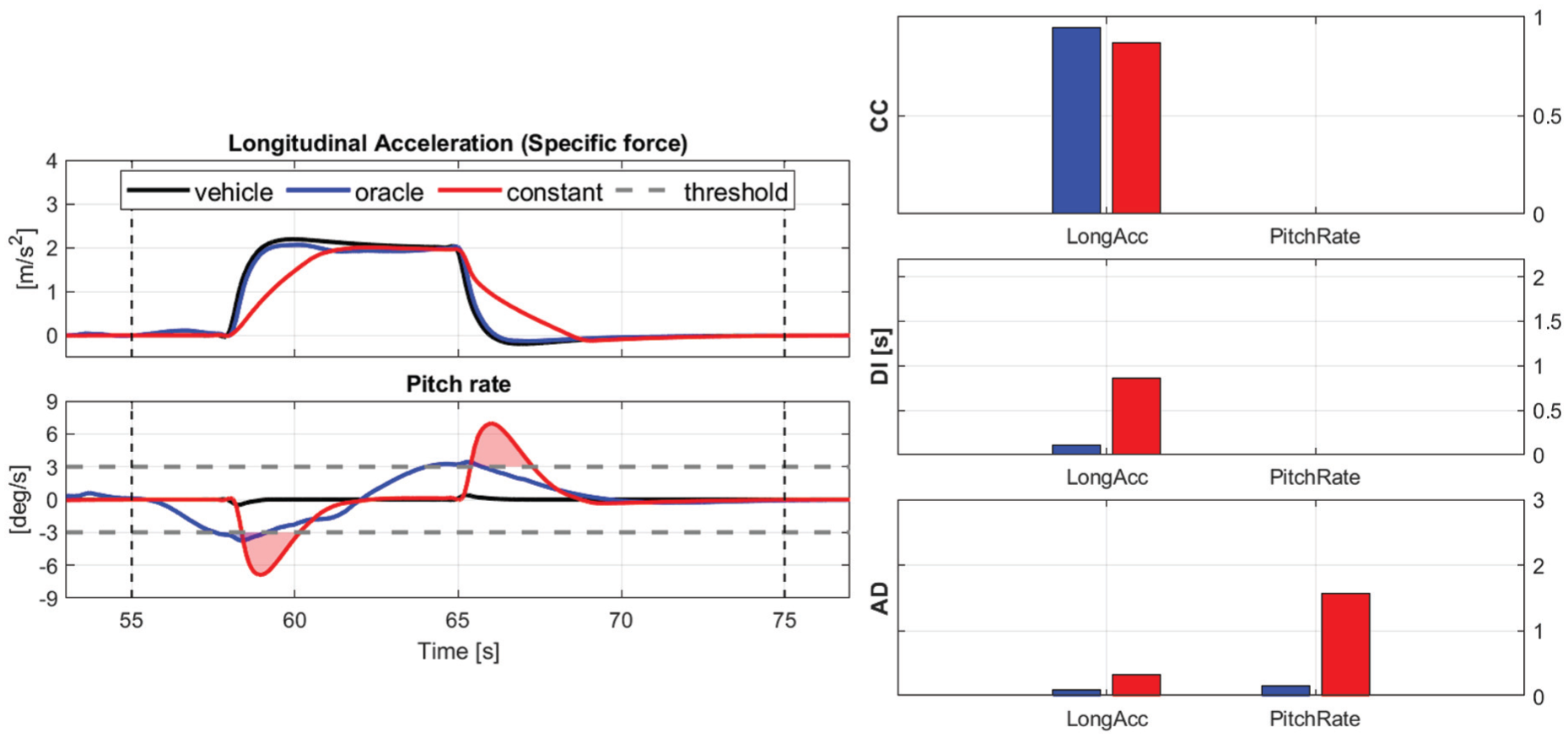
Resulting motion, and corresponding motion quality indicators, for the acceleration maneuver (A). The results are shown compared with the vehicle motion. Also the rotational velocity perception threshold of 3 deg/s is represented for reference.
Similar results for the braking maneuver are shown in Figure 2. This maneuver is more aggressive than the acceleration and therefore the differences between the two strategies are more evident. The shape of the acceleration signal for the oracle still follows the reference motion, with only a small reduction of motion amplitude. The indicators computed for the oracle reflect the motion results, with CC of 0.92, DI of 0.10 seconds and AD of 0.18. For the constant, the resulting motion differs from the reference. The signal shape is distorted, resulting again in false and missing cues, with an overall delayed acceleration cue. The results of the indicators for the constant strategy confirms the analysis of the motion signal, with CC of 0.77, DI of 1.03 seconds and a value of AD of 0.33. For the pitch rate, the signal obtained by the oracle strategy is again smooth but in this case it passes the perception threshold. The constant strategy results in a signal that is above the perception threshold for less time than the oracle, but with higher amplitude. The results obtained for the AD are the highest of all maneuvers, with a value of 1.73 for the oracle strategy and 2.66 for the constant strategy.
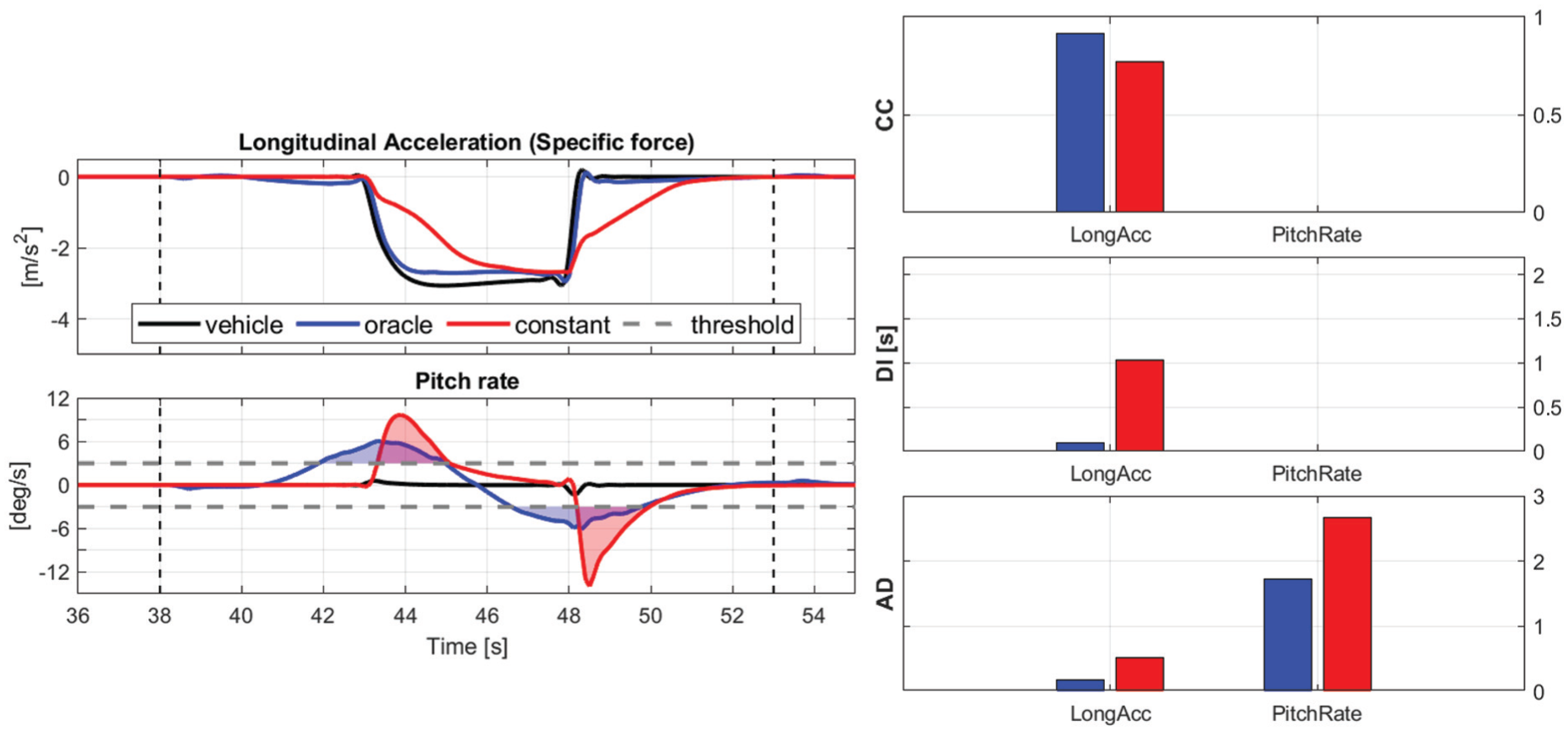
Resulting motion, and corresponding motion quality indicators, for the braking maneuver (B). The results are shown compared with the vehicle motion. Also the rotational velocity perception threshold of 3 deg/s is represented for reference.
3.1.2. Lateral dynamics
For the lateral dynamic maneuvers, lateral acceleration is the most relevant motion channel, together with the roll rate and yaw rate.
The results obtained for the CT maneuver are shown in Figure 3. The lateral acceleration obtained by both prediction strategies follows the reference motion quite well, with an evident difference only in the timing of the signals. In fact, the motion obtained with the oracle strategy starts and ends together with the reference, while the constant strategy results in a delayed acceleration cue. The analysis of the motion signals finds correspondence in the indicators results, where the main difference between indicators for the lateral acceleration is obtained for the DI, which is 0.05 seconds for the oracle strategy and 0.87 seconds for the constant strategy. The results for the correlation and absolute difference indicators do not show major differences between the prediction strategies, with CC values of 0.90 and 0.95, and AD of 0.13 and 0.17 for the oracle and the constant strategy respectively. For the roll rate, the motion signal obtained with the oracle strategy is always below the perception threshold, consequently the AD is 0. Oppositely, the roll rate resulting from the constant strategy exceeds the perception threshold, with an AD value of 0.42. Regarding the yaw rate, both the oracle and constant strategies fail to reproduce the amplitude of the reference motion signal, resulting in low values of CC and high values of AD. On the other hand, the shape of the signal can still be compared with the reference. The yaw rate obtained with the oracle strategy starts by going in the opposite direction but overall it has a shape very similar to the reference with only a small delay. The yaw rate resulting from the constant strategy is initially better than the one of the oracle, but at 15 seconds, changes direction and the signal goes almost to 0. This is reflected in the CC and DI indicators, where the CC is 0.28 for the oracle and 0.18 for the constant strategy, and the signal delay is 0.17 seconds for the oracle and 1.86 seconds for the constant. Together with the results of DI, also the delay threshold at 0.33 seconds is plotted, this value represents the maximum delay that cannot be perceived given the 22 deg of phase error threshold and the frequency content of the reference signal.
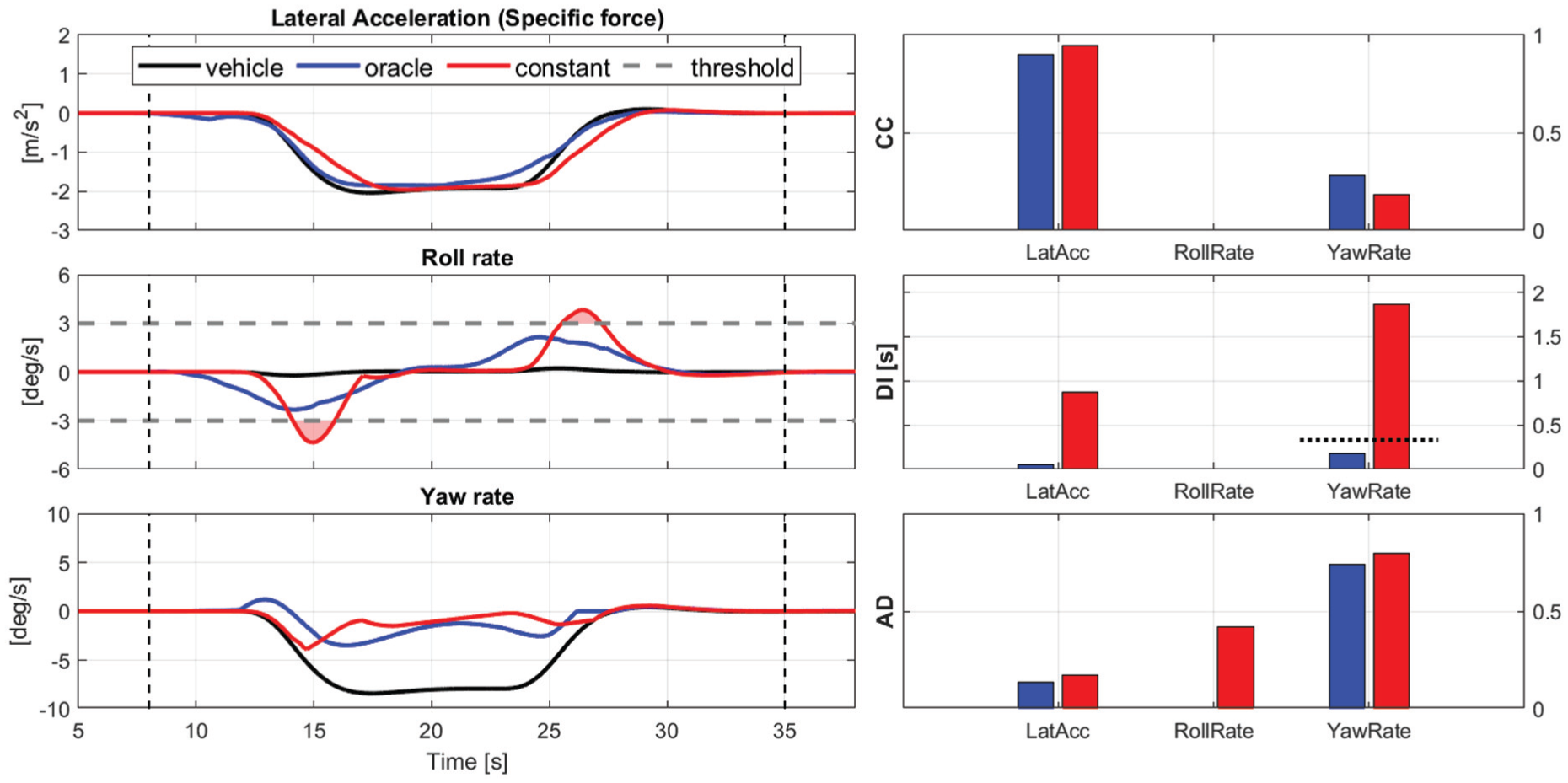
Resulting motion, and corresponding motion quality indicators, for the constant turn maneuver CT. The results are shown compared with the vehicle motion. Also the rotational velocity perception threshold of 3 deg/s is represented for reference.
The results for the DLC maneuver are shown in Figure 4. The lateral acceleration signal obtained with the oracle strategy is very similar to the reference, with only a small reduction in signal amplitude. The acceleration signal obtained with the constant strategy has a different shape than the reference, with reduced amplitude and a delay that increases during the maneuver. Also in this case, the results of the indicators reflect the outcome of the analysis. The CC is 0.82 for the oracle and 0.69 for the constant strategy, the DI is 0.11 seconds for the oracle and 0.64 seconds for the constant strategy and finally the AD is 0.25 for the oracle against 0.58 for the constant strategy. For the roll rate, the signal computed with the oracle strategy is always below the perception threshold with a consequent AD value of zero, while the constant strategy passes the perception threshold with an AD value of 0.36. Looking at the yaw rate, the results obtained with the oracle is very similar to the reference motion, with a small deviation before the beginning of the maneuver and a slight delay. On the contrary, the constant strategy fails to reproduce the reference motion, providing a yaw rate signal which only partially reproduces the original motion. The indicators computed for the oracle strategy reflect the analysis of the motion, with a CC of 0.96 and a DI of 0.12 seconds. The computed DI is also below the delay threshold of 0.22 seconds. The resulting DI value for the constant strategy is equal to 0.03 which is even lower than the DI obtained with the oracle, this is most likely due to the very different signal shape which invalidates the result. The AD obtained is equal to 0.23 for the oracle and 0.70 for the constant strategy.
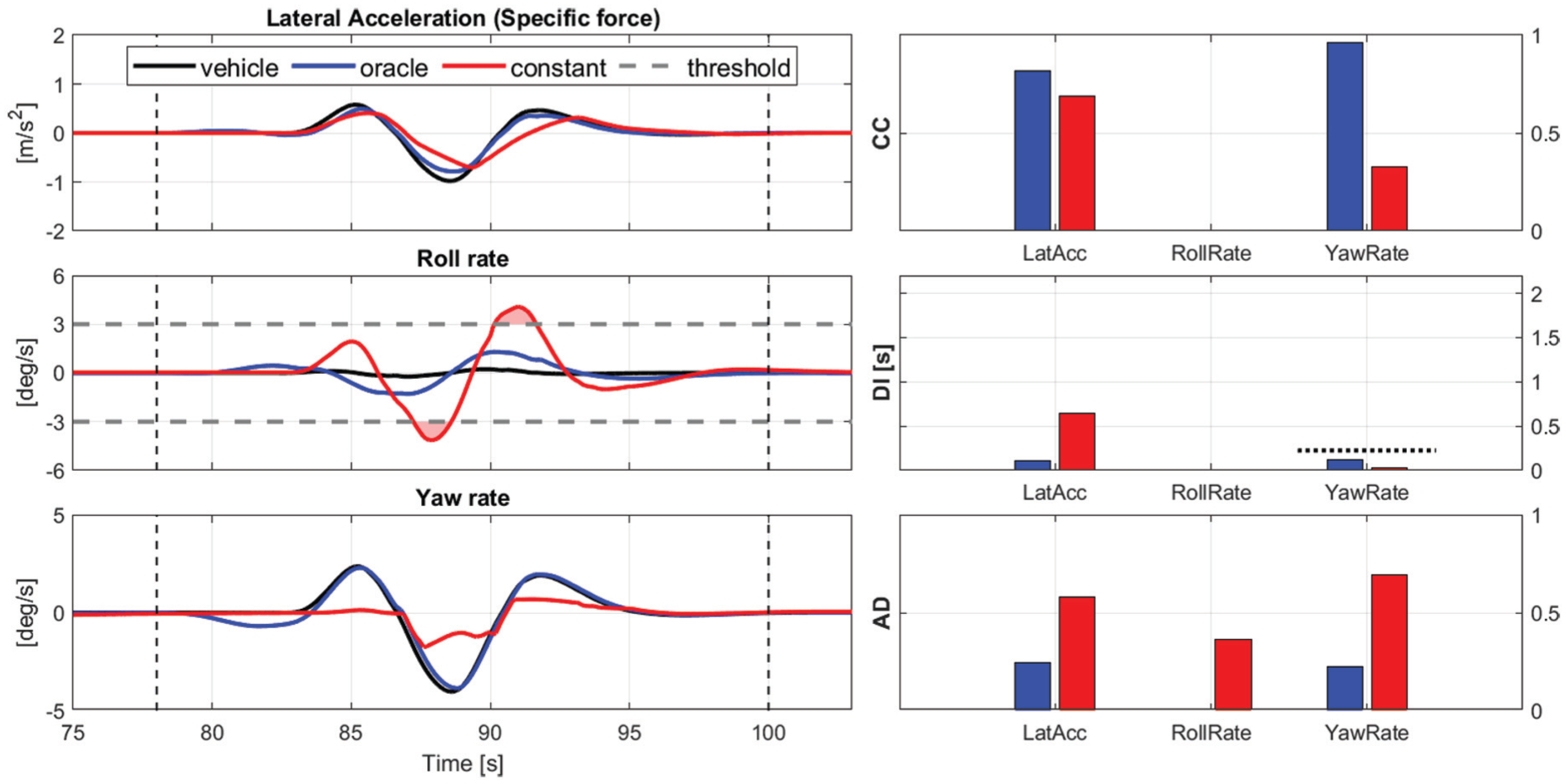
Resulting motion, and corresponding motion quality indicators, for the double lane change maneuver (DLC). The results are shown compared with the vehicle motion. Also the rotational velocity perception threshold of 3 deg/s is represented for reference.
3.1.3. Longitudinal/lateral dynamics
For the analysis of the indicators of the combined dynamic maneuver, the motion channels for both longitudinal and lateral dynamics are considered.
The results obtained for the combined dynamic maneuver are shown in Figure 5. The longitudinal acceleration obtained with the oracle strategy is again very similar to the reference motion, the signal shape corresponds, with a short delay and a small difference in amplitude. The corresponding indicator values reflect the analysis with CC of 0.94, DI of 0.11 seconds and AD of 0.13. On the contrary, the longitudinal acceleration resulting from the constant strategy differs from the reference motion. The signal shape is distorted, with alternating missing and false cues and an overall delayed signal. The results given by the indicators are representative of these differences, with CC of 0.86, a DI of 0.82 seconds and AD of 0.44. For the lateral acceleration the differences between the motion obtained by the two prediction strategies is less evident but still present. Regarding the shape of the signals, the best result is obtained with the constant strategy, which contrary to the oracle, is able to reproduce also the peak of acceleration between 120 and 125 seconds. The CC obtained with the constant strategy is 0.95, while for the oracle is 0.89. On the other hand, the lateral acceleration motion obtained with the constant is delayed with respect to the reference, resulting in a DI of 0.80 seconds. In comparison, the DI computed for the oracle is 0.18 seconds. The absolute difference for the lateral acceleration motion is comparable for the two prediction strategies, with a value of AD of 0.15 for the oracle and 0.22 for the constant strategy. For the pitch and roll rate, the motion obtained with the oracle strategy is mostly smooth and always below the perception threshold and consequently the AD is in both cases equal to 0. In contrast with the oracle, the motion signals obtained with the constant strategy is less smooth and passes the perception threshold for both roll and pitch rate, with AD of 0.05 for the roll rate and 0.28 for the pitch rate. For the yaw rate, the resulting motion signals are both different from the reference motion in terms of shape and amplitude, but the signal obtained with the oracle strategy is better synchronized with the reference. The indicator results for correlation and absolute difference are very similar for both strategies, with CC of 0.36 and 0.37 and AD of 0.64 and 0.65 for the oracle and constant strategy respectively. The only clear difference in the indicator results is obtained for the DI, which is 0.20 seconds for the oracle and 2.04 seconds for the constant strategy. Also in this case the delay threshold is computed, the result is 0.31 seconds, which is higher than the DI obtained with the oracle strategy.
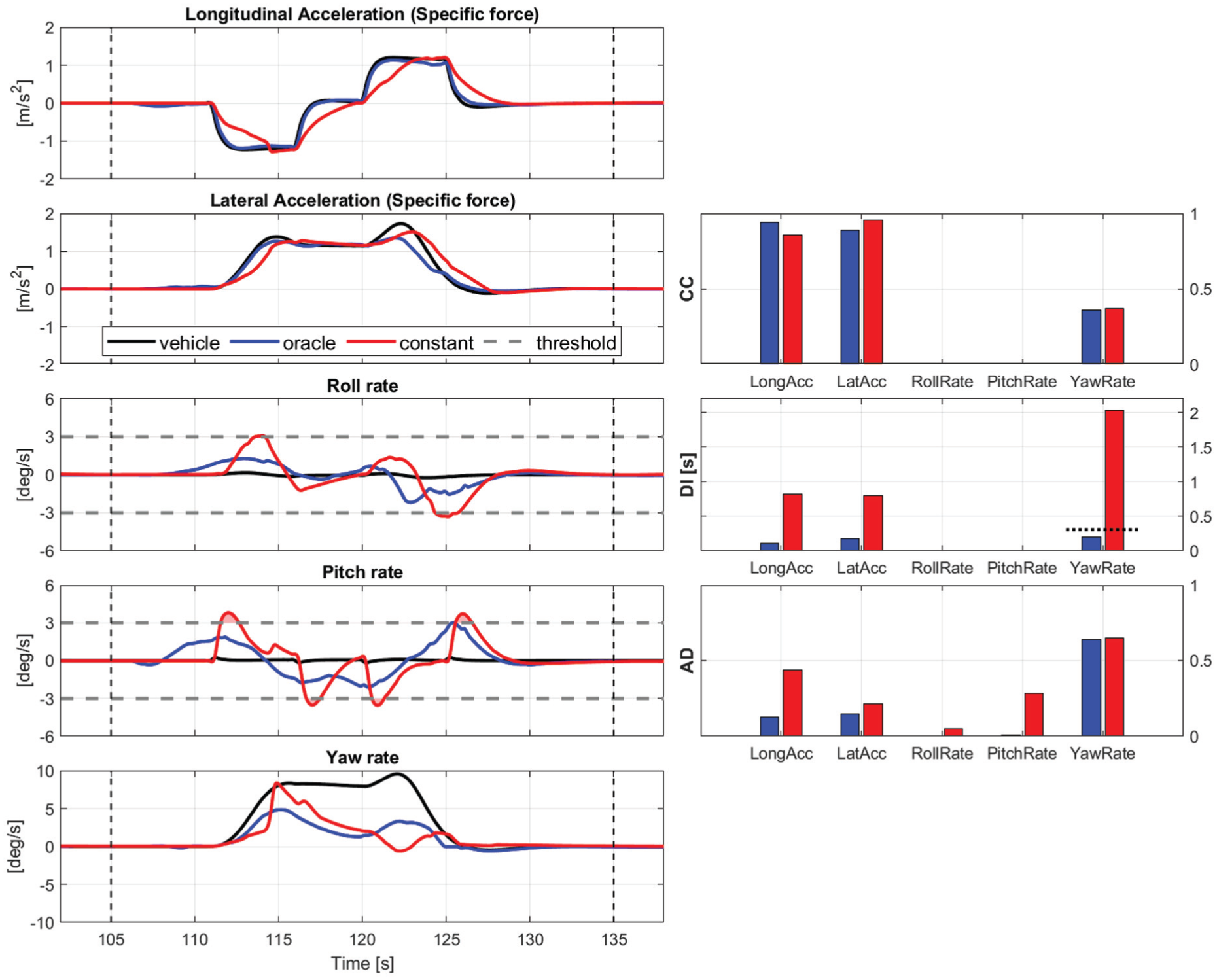
Resulting motion, and corresponding motion quality indicators, for the combined dynamic maneuver BCTA. The results are shown compared with the vehicle motion. Also the rotational velocity perception threshold of 3 deg/s is represented for reference.
3.2. Motion cueing mechanisms
Tilt coordination is used in all maneuvers by both prediction strategies. In Figure 6, both effects of tilt coordination and velocity buffering can be seen. The usage of tilt coordination from both prediction strategies is evident from the analysis of the components of the longitudinal acceleration. In fact, only the linear component of the acceleration would not be sufficient to reproduce the sustained acceleration, therefore the gravitational component is used, tilting the motion system to use a component of the gravitational acceleration.
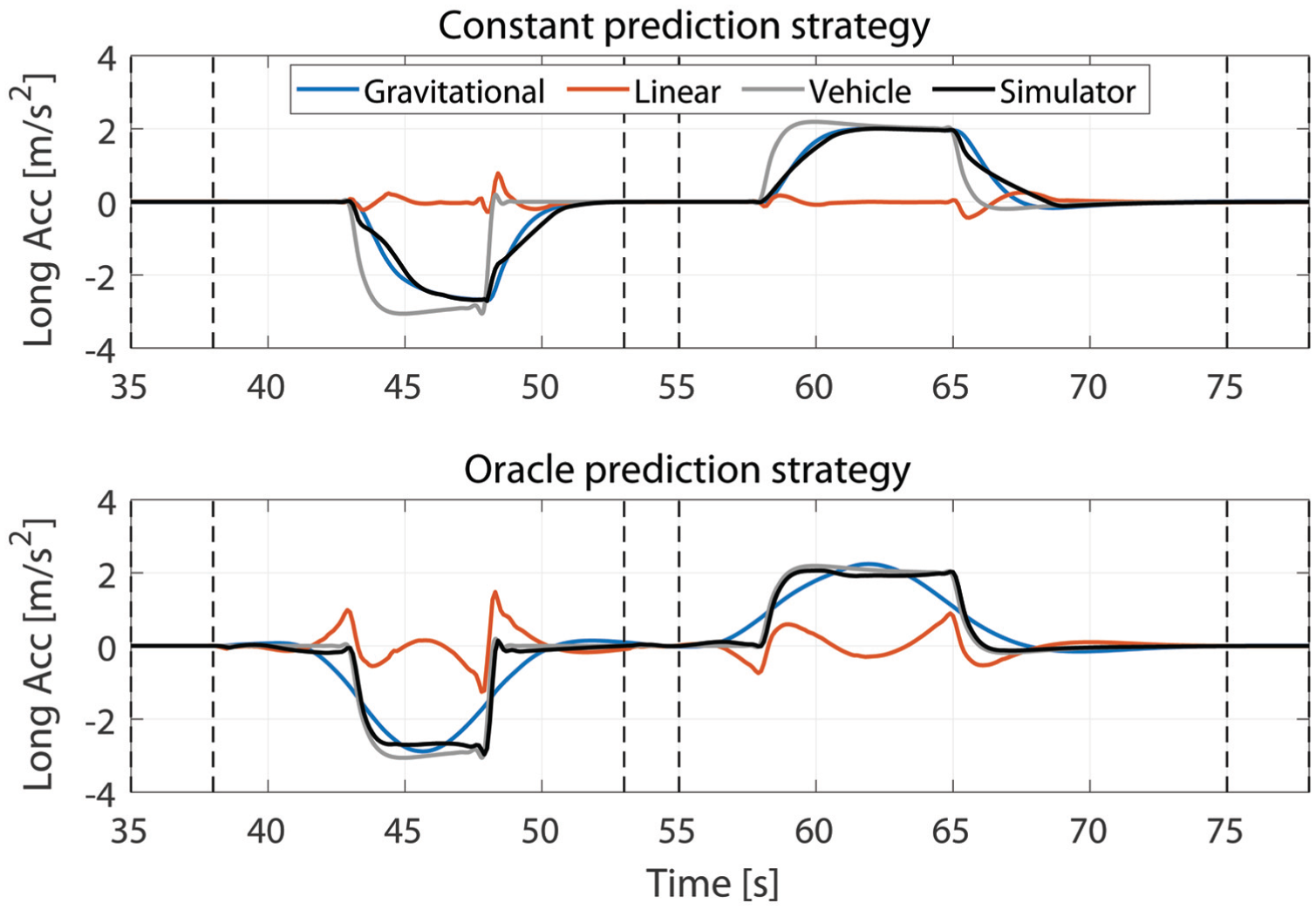
Different contributions to linear acceleration reproduction for the oracle and constant prediction strategy in longitudinal dynamic maneuvers.
Also the effect of velocity buffering can be seen in Figure 6, in particular between 40 and 45 seconds and between 55 and 60 seconds. The oracle strategy starts accelerating the platform in the opposite direction, while compensating with tilt coordination. The constant does not make use of velocity buffering as it starts to tilt the motion platform only when the acceleration begins.
An example of prepositioning can be seen in Figure 7, where the lateral displacement of the motion system is shown together with the resulting lateral acceleration for each prediction strategy. A few seconds before the maneuver, the oracle strategy moves on one extreme of the available workspace, making possible the use of a longer excursion to reproduce the lateral acceleration. The constant strategy does not show similar behavior, by starting the simulator motion at the start of the maneuver.
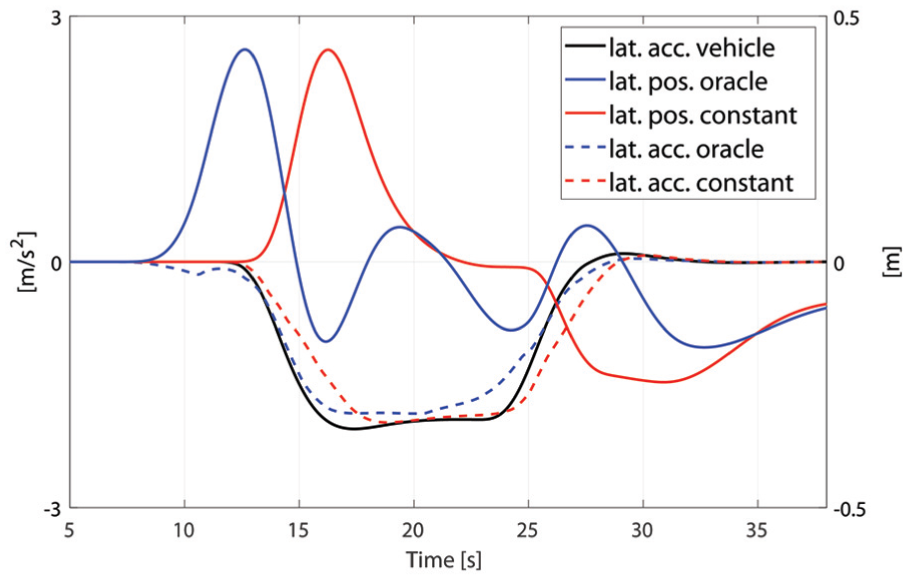
Comparison of simulator lateral displacement and perceived lateral acceleration during the constant turn maneuver for the oracle and constant prediction strategy.
3.3. Workspace usage
The actuators’ length is computed for the entire sequence of maneuvers and for the two prediction strategies. The length of each actuator is then normalized between 0 and 1 and the interquartile range is computed. The results are shown in Figure 8, where it can be seen that the interquartile range is always larger for the oracle strategy compared to the constant strategy and therefore it can be inferred that the oracle makes more use of the actuators’ length.
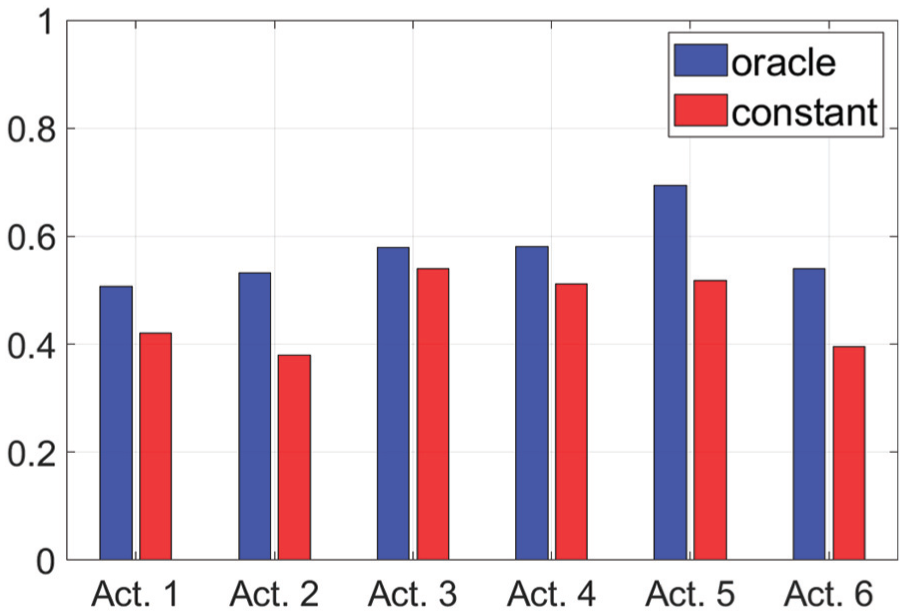
Interquartile range of the normalized actuators’ length for all the maneuvers. Comparison between the adopted prediction strategies.
Regarding the usage of the motion platform position workspace, the results are shown in Figure 9 for translations and Figure 10 for rotations, where the motion envelope for the reproduction of the entire sequence of maneuvers is shown for both prediction strategies. For translations, the volume of the convex hull of the motion envelope used by the constant is 0.0451
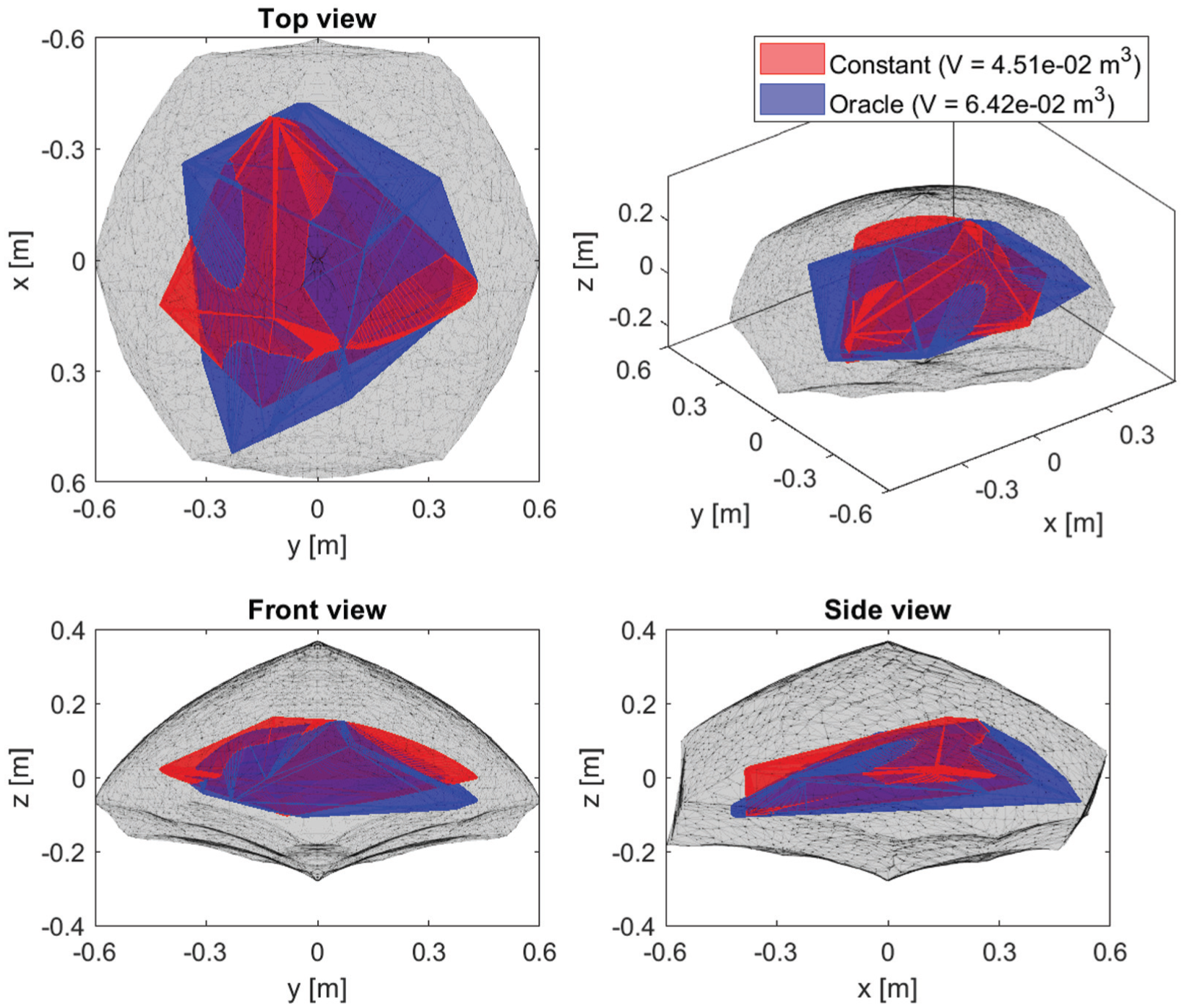
Simulator position workspace comparison between oracle and constant prediction strategy. The motion envelope is computed considering x-y-z coordinates. The bigger area represented in light grey is the complete motion platform position workspace considering all reachable orientation.
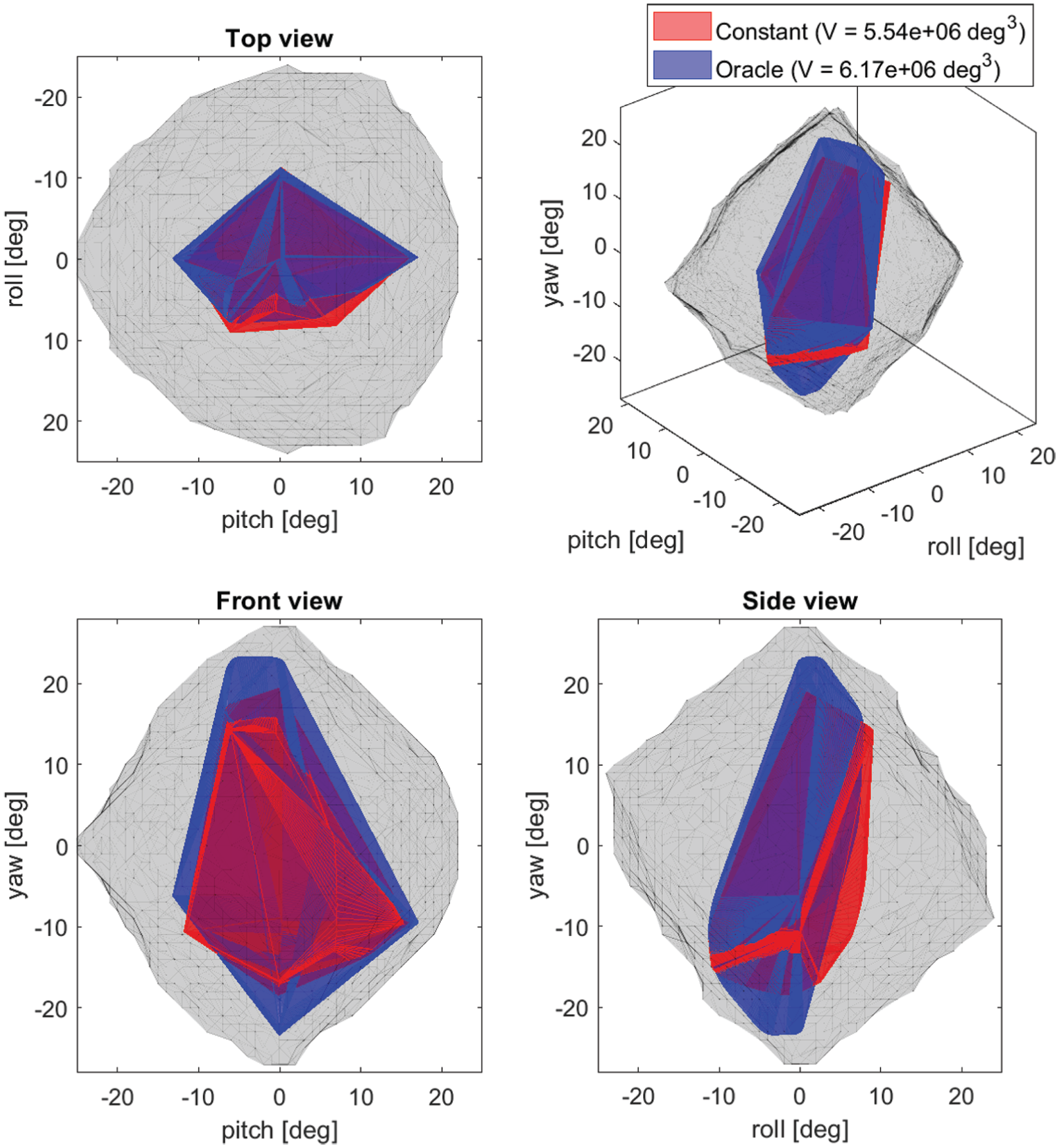
Simulator orientation workspace comparison between the oracle and constant prediction strategy. The motion envelope is computed considering roll-pitch-yaw coordinates. The bigger area represented in light grey is the complete motion platform orientation workspace considering all reachable position.
4. Discussion
The inspection of actual response curves and the corresponding motion quality indicators shows that the indicators are able to qualify and quantify the differences between the reference motion and the motion obtained with the considered prediction strategies. From the results it emerges that several indicators are useful to understand one particular difference between the signals (i.e., shape difference, delay or absolute difference) but only the combined analysis of the indicators provides a complete understanding of the motion resulting from a particular prediction strategy.
The oracle strategy achieves higher motion cueing quality than the constant strategy by starting the simulator motion before the beginning of the maneuvers, allowing the use of prepositioning and velocity buffering, in addition to tilt coordination, which is the only motion cueing mechanism adopted by the constant strategy. The combined use of multiple motion cueing mechanisms adopted by the oracle leads to a larger interquartile range for the actuators and therefore to a better use of the simulator workspace, especially when most needed. For example, in the braking maneuver, when the longitudinal acceleration reaches its maximum, the oracle strategy results in a simulator motion very close to the maximum longitudinal displacement of the hexapod. It is important to notice that the motion cueing mechanisms are not direct functionalities of the predictive MCA but rather the results of the optimization and they provide better results when the future prediction is perfectly accurate. When the future prediction is incorrect, the quality of the motion cueing could be reduced by a misuse of the motion cueing mechanisms resulting from the attemp of the predictive MCA to reproduce an incorrect reference.
From the results obtained for the workspace usage, it can also be inferred that to achieve the same motion cueing quality performances, the oracle requires a smaller motion system workspace than the constant. Or, that the constant strategy requires a larger workspace to achieve the same motion cueing quality that can be obtained with the oracle strategy.
Moreover, from the analysis of the simulator motion, it can be noticed that the constant strategy results are less smooth, with higher linear jerk and angular acceleration values. Previous studies38,39 found that this can reduce the quality of perceived motion, which is another aspect that underlines the lower performances of the constant with respect to the oracle strategy.
The analysis of the maneuvers divided in longitudinal, lateral and combined dynamics shows that the differences in motion cueing quality between oracle and constant are more evident especially for longitudinal and combined dynamic maneuvers. In particular for longitudinal dynamic maneuvers, the analysis shows large improvement with a more accurate prediction strategy knowing future motion. Nevertheless, the oracle strategy cannot be used for DIL simulations, while the constant strategy, with its suboptimal results, can be used for simulating active driving. The results indicate that it is worthwhile to invest in a better prediction than the constant and this could be done by using information about the road and traffic, such as traffic signs/lights and/or velocity of leading vehicles. The information could be used to predict if the driver will accelerate or brake the vehicle. Similarly, for the lateral dynamics, information about the future road profile can be used to foresee turning maneuvers. These approaches could be combined with a simplified vehicle model to predict longitudinal and lateral accelerations. Such a prediction strategy would result in improved motion cueing quality performances and still be usable in DIL simulations.
Finally, the objective evaluation carried out in this study is based on objective metrics that have been shown to highly correlate with subjective evaluation and therefore, the results of objective and subjective evaluations are expected to correspond. Nevertheless, it is useful to conduct a human-in-the-loop experiment to identify which indicator weighs most for the overall perceived motion quality and what is the difference between indicator values which is large enough for humans to detect the quality difference. A suitable method to adopt here could be the continuous rating method, 40 where the subjects of a passive driving experiment continuously provide a feedback of the mismatch between visual and motion.
5. Conclusions
In this study, the effects of two prediction strategies on optimization-based MCA have been analyzed. The first strategy, oracle, assumes perfect knowledge of future vehicle motion, it cannot be used for DIL simulations and it is considered as a reference to evaluate the best motion cueing quality that can be achieved. The second strategy, constant, ignores changes in the future reference and assumes a constant reference equal to last vehicle status. The objective analysis carried out aimed to qualify and quantify the effects of the prediction strategies by means of dedicated metrics. Motion cueing quality indicators have been defined to quantify correlation, delay and absolute difference of the simulator motion with respect to the reference vehicle motion. An analysis of the adopted motion cueing mechanisms has been performed together with a study on the usage of the motion system workspace. As expected, the oracle outperforms the constant strategy, being able to coordinate the usage of multiple motion cueing mechanisms and manage the use of the limited workspace to obtain better motion cueing quality performances. The combined analysis of multiple indicators confirms the differences in performance and provides the metrics to quantify these differences. From the indicator results, the larger performance difference is obtained for longitudinal dynamic maneuvers, providing an indication of what should be improved in the future design of advanced prediction strategies for optimization-based MCAs.
Footnotes
Acknowledgements
The authors acknowledge the Max Planck Institute for Biological Cybernetics, the researchers and the technicians who were involved in this study. In particular, Maria Lächele, Joachim Tesch and Daniel Diers are kindly acknowledged for their technical support. Mikhail Katliar and Ksander de Winkel are also acknowledged for the helpful discussions and suggestions.
Funding
Author biographies
![]() ).
).