
Abstract
As the majority of real signals (e.g., the dynamic information obtained during bridge Global Navigation Satellite System (GNSS) monitoring) are nonlinear and nonstationary, variational mode decomposition (VMD) and its derivatives have become popular research topics in recent years worldwide. However, the VMD method has the problem in which improper parameter selection results in a poor decomposition effect. This study analyzes the different decomposition effects of the VMD parameters, such as the decomposition layer number K, the modal frequency bandwidth control parameter
Keywords
1. Introduction
Similar to other building structures, the modal parameters of a bridge—including natural frequency, mode shape, and modal damping—are functions of its physical properties such as mass, damping, and stiffness. Consequently, any changes in these physical characteristics result in corresponding changes in the modal parameters.1,2 In other words, environmental factors like loading conditions, ship collisions, and material aging can excite the bridge structure and induce dynamic responses. 2 Early detection of abnormal deformations or frequency shifts, along with timely interventions before structural damage accumulates to a critical level, can help prevent severe casualties and economic losses. 3 Following consistency checks between GNSS-based displacement monitoring and total station measurements,4,5 as well as between GNSS-derived frequencies and accelerometer data,6,7 growing attention has been paid by researchers and engineers to GNSS-based techniques for structural monitoring. These include advanced GNSS positioning methods, high-sampling-rate GNSS receivers,8,9 multi-frequency and multi-system GNSS configurations, multipath effect mitigation, 10 noise characterization, 11 and signal denoising techniques. These continuous improvements enable the extraction of continuous, real-time, high-frequency micro-deformation data from major engineering structures. As a result, GNSS dynamic monitoring data are becoming an increasingly vital reference for assessing the safety status of bridge structures.12,13 Deformation monitoring primarily focuses on both static and dynamic behavior, including position, displacement, settlement, and linear or even nonlinear deformations of structural components. Among the modal parameters, the natural frequency (or terms as vibration frequency) is the most readily accessible. 14 Unlike accelerometers, which lack a trend term and require integration that may introduce errors, 15 the natural frequency extracted from long-term high-frequency monitoring time series serves as a key indicator of structural safety.13,16–22
However, GNSS dynamic monitoring data of bridges are influenced by traffic loads and environmental excitations, resulting in highly complex nonlinear and nonstationary signal characteristics. Due to multipath effects and random errors, the true dynamic displacements are often obscured by strong noise, limiting the applicability of GNSS for modal identification. Therefore, effective data preprocessing is essential to mitigate measurement errors before extracting structural dynamic features. 23 Moreover, identification methods should be advanced based on the time–frequency characteristics of GNSS data, particularly to capture subtle frequency variations in bridge structures. 24
To date, researchers have employed a variety of techniques to extract vibration modal parameters from nonlinear and nonstationary GNSS monitoring data. These include Fourier transform,24,25 wavelet analysis,26–29 empirical mode decomposition (EMD),30–32 and ensemble empirical mode decomposition (EEMD).33–37 For instance, Huang and Wang et al. 16 introduced a hybrid method combining EMD, permutation entropy (PE), and spectral substitution to suppress noise while preserving signal content. This approach, applied to noisy GNSS data from the Wuhan Baishazhou Yangtze River Bridge—referred to as PSEEMD—yielded significantly clearer dynamic characteristics. Wang et al. 38 proposed a time–frequency method integrating wavelet threshold denoising with Hilbert–Huang Transform (HHT), which accurately reflected the spectral properties of the bridge and aligned well with theoretical predictions. In another study, Wang et al. 18 developed an adaptive stochastic resonance method based on a quantum genetic algorithm to extract reliable dynamic features from GNSS signals. While these methods have shown some success, they still face limitations in effectively handling frequency variations, especially in the context of nonlinear and nonstationary signal transitions.
Variational mode decomposition (VMD), introduced by Dragomiretskiy et al. 39 in 2014, offers a novel approach to signal processing. VMD identifies the frequency center of each component through iterative optimization of a variational model. It simultaneously determines the center frequency and bandwidth for each mode, enabling effective frequency-domain separation and component isolation. 38 Unlike EMD, which recursively decomposes signals, VMD simultaneously extracts all modes by estimating band-limited intrinsic mode functions and adaptively determining their center frequencies. 39 Experimental results from Dragomiretskiy et al. 39 demonstrated the superiority of VMD over EMD in tone detection, signal separation, and noise robustness, a conclusion further supported by Wang and Markert. 40 Consequently, VMD has been widely adopted in mechanical fault diagnosis.41–46 In civil engineering, Zhang et al. 47 applied VMD to modal identification and confirmed its advantage over EMD in decomposing certain types of vibration signals.
Therefore, the selection of the right parameters for combination is a primary problem in signal decomposition for the VMD method and thus has become the focus of research by many scholars. Li et al. 46 proposed a VMD parameter optimization method based on independence but did not consider the impact of the penalty coefficient on the decomposition result. Shi and Yang 48 proposed a method to optimize VMD, but the interaction between two parameters was ignored, and the algorithm tended to fall into local optimization. Yan et al. 49 proposed a genetic algorithm-based optimization VMD method to optimize two parameters at the same time. However, the optimization objective function (envelope spectrum entropy value) employed only considered the influence of the decomposition mode characteristics, but the correlation between the inherent modal components and the original signal were ignored. In such scenarios, information loss may occur. As the VMD parameter optimization objective function directly affects the accuracy and efficiency of the final decomposition, this problem is worthy of attention and requires urgent investigation.50,51
The objective of this project is related to modal identification and analysis. By improving the method of VMD parameter optimization based on multi-objective particle swarm optimization (MOPSO), the optimized VMD parameters can provide the dynamic characteristics needed to assess the health condition of operational bridges (as shown in Figure 1). The paper is arranged as follows. Section 2 provides a general description of VMD and its superiority as a method. Section 3 is devoted to the review of previous works that include topics on how the VMD parameters influence the effect of decomposition and the shortcomings of existing parameter optimization methods. The parameter-optimized VMD method based on the MOPSO algorithm is investigated in Section 4. Section 5 provides the simulation experiment and example verification. Section 6 and 7 gives discussions and the concluding remarks. The technical route of this study is shown in Figure 1. The technical route of this study.
2. VMD and its superiority as a method
2.1. The VMD method
Different from the intrinsic mode function (IMF) defined by EMD that must meet strict conditions, VMD defines IMF as an amplitude modulation–frequency modulation signal according to the formula

Similarly, different from the processing method and derivative algorithms of signal stripping by means of empirical screening in EMD, VMD transfers the signal decomposition process to the variational framework and searches for the optimal solution of the constrained variational model to achieve decomposition. 39
Each frequency center and bandwidth of the IMF component of VMD (to distinguish between the IMF obtained by EMD and its derivative algorithms, the IMF of the VMD method here is abbreviated as VIMF, and the same applies hereafter) are continuously updated under the action of related parameters in the process of iteratively solving the variational model. Then, the frequency domains reflecting the characteristics of the signal may be subdivided automatically, and the several specified VIMF components can be obtained. 39
If a certain nonlinear and nonstationary signal

In solving the optimal solution of Equation (2), an augmented Lagrange function is constructed as follows:

The approach called alternating direction method of multipliers (ADMM) is commonly employed to solve the saddle point of the augmented Lagrange function of Equation (3), and then the optimal solution of the constrained variational model is obtained. That is, ADMM is used to decompose the original nonlinear and nonstationary signal into K narrowband VIMF components. 39
2.2. Implementation steps of VMD
The implementation steps of the VMD algorithm
39
are as follows: (1) Initialize (2) Assign a new value to the loop (3) Implement the first cycle of the inner layer, and then update (4) Update the number of iterations with (5) Implement the second cycle of the inner layer. Update (6) Update the number of iterations with (7) Update (8) Repeat steps (2) to (7) until the iteration stop condition
The VMD algorithm needs to specify the following four parameters in advance
52
: number of modal layers K, modal frequency bandwidth control parameter (or quadratic penalty term)
2.3. Superiority analysis of VMD
A simulation-combined signal composed of three sinusoidal signals and noise is constructed to verify the differences in the decomposition effects of VMD, EMD and the derivative algorithms. Time domain waveform of the combined signal 



The nonlinear and nonstationary signal is processed by the EMD method. The diagram of the time–frequency analysis is shown in Figure 2. Due to the modal aliasing, the first three components seem to all contain the frequency component of Time domain of IMF components of the simulation signal 
The simulation signal is processed by the PSEEMD method by using the same parametric settings, which is similar to that in Ref.
18
, and the time–frequency analysis diagram is shown in Figure 4. Similar to the EMD method, PSEEMD obtains the first three components containing the Time domain of IMF components of the simulation signal 
The VMD mode layer number is K = 4, the penalty factor is Time domain of VIMF components of the simulation signal 
The combination and analyses of the frequency spectra of the (V)IMF component obtained by the aforementioned three methods further suggest that VMD not only can avoid modal aliasing effect but also has a good denoising effect.
3. Functions of VMD parameters and existing parameter optimization methods
As mentioned previously, the VMD algorithm comprises the following four parameters: K,
3.1. Influence of different parameters on the decomposition effect of VMD
Determining the best parameters that match the signal to be analyzed is necessary in understanding the impact of each parameter on the decomposition effect of the VMD algorithm. A possible approach is to consider one of the important ways for obtaining human knowledge—comparative observation method. In this scheme, each influential parameter changes constantly, whereas the other influencing parameters remain constant. Then, their influences on the VMD decomposition effects are sequentially explored. On the basis of the aforementioned purpose, the simulation signal consisting of the frequency modulation, sinusoidal, intermittent sinusoidal, and noise signals is constructed as follows: Time domain waveform of the combined signal 




A nonlinear and nonstationary signal (
3.1.1. Influence of parameter K
In the investigation of the influence of parameter K on the VMD decomposition effect, the parameters are set as Decomposition effect of VMD with different K values.
As shown in Figure 7(a), VIMF1 corresponds to the
There are also insufficient decomposition of signal
When it comes to K = 8, the VMD processed result is shown in Figure 7(c). It can be inferred that the components VIMF1-VIMF5 are in good agreement with the
When the parameter K continues to increase to 9, the first 5 components via VMD processing are also in good agreement with the components of signal
When the parameter K increases further to 10, the VIMF2-VIMF9 components of the obtained decomposition result (Figure 7(e)) share a high similarity as those of the components in Figure 6. However, an emerging component (VIMF1), which does not match any component of the original signal, can be observed. As such, this component can be judged as a noise term or a meaningless component. As the VIMF2–VIMF9 components in the results are in good agreement with those of the original signal, and the noise items can be distinguished and eliminated, the decomposition effects are likely acceptable when K = 10. However, this finding also indicates that the signal is overly decomposed when the parameter K of VMD increases to 10.
When the parameter K increases gradually to 11, 12, 13, 14, and 15, a phenomenon of excessive decomposition is observed, which is in good agreement with some VIMF components in the VMD result and the corresponding components of the original signal. Only the VMD decomposition result of K = 15 is plotted in Figure 7(f) to save space in this paper, and “vi” is used instead of “vimfi” (
The aforementioned analysis indicates that the setting of K is particularly important to the decomposition effect of the VMD algorithm. A suitable K value is needed to properly and effectively decompose the nonlinear and nonstationary signal. By contrast, insufficient or excessive decompositions of the original signal may occur for the smaller or larger K values.
3.1.2. Influence of parameter
In investigating the influence of parameter Decomposition effect of VMD with different 
As shown in Figure 8(a), VIMF1 corresponds to the
The parameter
When the parameter
In summary, an appropriate value of the parameter
3.1.3. Influence of parameter
In investigating the influence of parameter Decomposition effect of VMD with different 
As shown in Figure 9(a), VIMF2 corresponds to the
Even with the increase in value of the parameter to
The VMD-processed result when the parameter
As shown in the subfigure of Figure 9(f), when the parameter
The abovementioned analysis indicates that the setting of
The appropriate parameter
The last parameter convergence criterion on tolerance
In general, the number of modal layers K, the modal frequency bandwidth control parameter
3.2. Existing VMD parameter optimization methods and their shortcomings
The signal in practical engineering, especially the bridge GNSS monitoring data obtained under the excitation of an uncertain external environment, is apt for characterizing the signal’s nonlinear and nonstationary complexities. In general, determining the parameters of the VMD algorithm for the decomposition of the actual signal is difficult until detailed analysis and research are performed. If the parameters are not selected properly, then the decomposition of nonlinear and nonstationary signals cannot achieve accurate results and, even leading to wrong decomposition results. Section 3.1 examines the influences of the different parameters on the VMD decomposition effect as a means of providing a possible direction for the parameter optimization of the VMD algorithm. In actual signal decomposition, a feasible method is to draw all of the decomposition results for comparison, and then the better VMD influence parameters are selected manually. However, the efficiency is too low with this approach, and it is not objective.
Finding the best parameters that match the signal to be analyzed is central in the VMD method. 53 The particle swarm optimization (PSO) algorithm is an intelligent optimization algorithm with good global optimization capabilities. 54 This method can be used to optimize the influencing parameters of the VMD algorithm in parallel, to effectively and rapidly screen out the best influencing parameter combination. Many researchers choose swarm intelligent evolutionary algorithms such as particle optimization algorithms to search for the influencing parameters of VMD, and obtain certain achievements, but they also have certain shortcomings.
3.2.1. Particle swarm optimization algorithm
The PSO algorithm53,54 is a single-objective optimization algorithm proposed by Eberhart and Kennedy in 1995. Its development was inspired by the social behavior of certain biological organisms, especially the ability of bird groups and fish schools to identify ideal locations in specific areas. 54
The dominant factor of PSO is to track and search for particles (or individuals) that can obtain the local temporary optimal position within a search range and the optimal position to be obtained by neighboring particles. For the mathematical problem of a single objective in finding a minimum (maximum) value, the optimal position represents a single or multiple independent variable/s to obtain the minimum (maximum) value. In the PSO process, the optimal position of an individual particle is called the “local optimum,” and the optimal position sought by all particles is called the “global optimum”. The global optimal solution is the goal to be sought by all particles, and it is achieved through multiple iterations.
Assuming that the problem to be optimized has D dimensions, then the position of the i-th particle can be expressed as a D-dimensional vector as follows:


The initial position of the i-th particle is expressed as

The optimal position currently sought by any particle in the population is given by



In the abovementioned formulas,
The population in the PSO algorithm has N particles representing the feasible solutions, and each particle contains a D-dimensional real number vector. The parameter D is the number of parameters that need to be optimized. Then, each optimized parameter is used to represent a one-dimension solution space of the optimization problem. 54
The flowchart of the PSO method is shown in Figure 10. The steps are as follows
54
: (1) Initialization: Set t = 0, randomly generate the position (2) Update the iteration count: (3) Update the weight: (4) Update the velocity: Update the optimization velocity of the j-th particle in the k-th dimension by substituting the global optimal solution and the individual solution into Equation (15). (5) Update the location: On the basis of step (4), the location of each particle is updated according to Equation (16). (6) Update local individual optima: Search or update the optimal solution of the current population (7) Update the global optima: Compare the individual optimal solution (8) Iteration stop criterion: If the condition is met, then stop the iteration and obtain the solution of the optimization problem; otherwise, repeat step (2) and continue to iterate until the condition is met. Flowchart of the PSO algorithm.

3.2.2. Shortcomings of the existing VMD parameter optimization methods
Aiming at resolving the problem of difficult parameter selection when performing VMD processing on nonlinear and nonstationary signals without prior knowledge, Tang et al. 56 utilized the envelope spectrum of the VIMF components as the fitness function and employed the PSO algorithm to optimize the VMD parameter K. However, Yu et al. 57 believe that the K value obtained via this optimization is unstable, and the result can affect the correctness of the decomposition. As for the correlation coefficient used to judge whether the VIMF component is effective, an improved VMD algorithm is proposed by Wang et al. 58 to determine the number of modal layers K. Yu et al. 57 and Wang et al. 59 considered permutation entropy as a fitness function for parameter optimization (i.e., PE) and proposed improved VMD algorithms. However, the PE threshold was set to 0.6 by Wang et al. according to Ref. 60 , which has always served as the basis for judging whether the IMF component is the abnormal component. This approach is inappropriate according to the discussion in Section 2 of Ref. 16 .
Meanwhile, after checking the calculations, Li et al. 61 determined that slight differences exist in the computational time-consuming and signal complexity recognition accuracies for the symbol entropy, approximate entropy, sample entropy, and permutation entropy of signals. Therefore, the signal permutation entropy of VIMF obtained by the VMD decomposition can be selected as the fitness function in the optimization process to optimize the influence parameters.
In general, the terms selected by the existing VMD parameter optimization algorithm and used as the fitness functions can be divided into the following three categories: envelope spectrum, correlation coefficient, and permutation entropy of the VIMF component.
Similar to the elements in EMD processing, the nonlinear and nonstationary signals processed by VMD can be defined as



According to Ref.
55
, the envelope entropy can be expressed as

Sum of the first K-1 VIMF components

The difference between the original signal and

According to Tang et al., 56 if the signal contains a large volume of noise and the periodic signal characteristics are not obvious, then the sparseness of the signal is weak and the envelope entropy value is large. Otherwise, the envelope entropy value is small. By referring again to Equation (22), the VMD processing with optimized parameters can always be considered to be the ideal Wiener filter. As the denoising effect is obvious and the periodic characteristics in the signal are prominent, the value of the envelope entropy is generally small. Furthermore, the value of the envelope entropy of the first VIMF component can reflect the decomposition effect.
On the basis of the analysis, when a correlation exists between
Searching for the minimum value generally serves as the fitness function of the PSO algorithm. Here, the ideal
The function The function that converts maximum value to minimum value.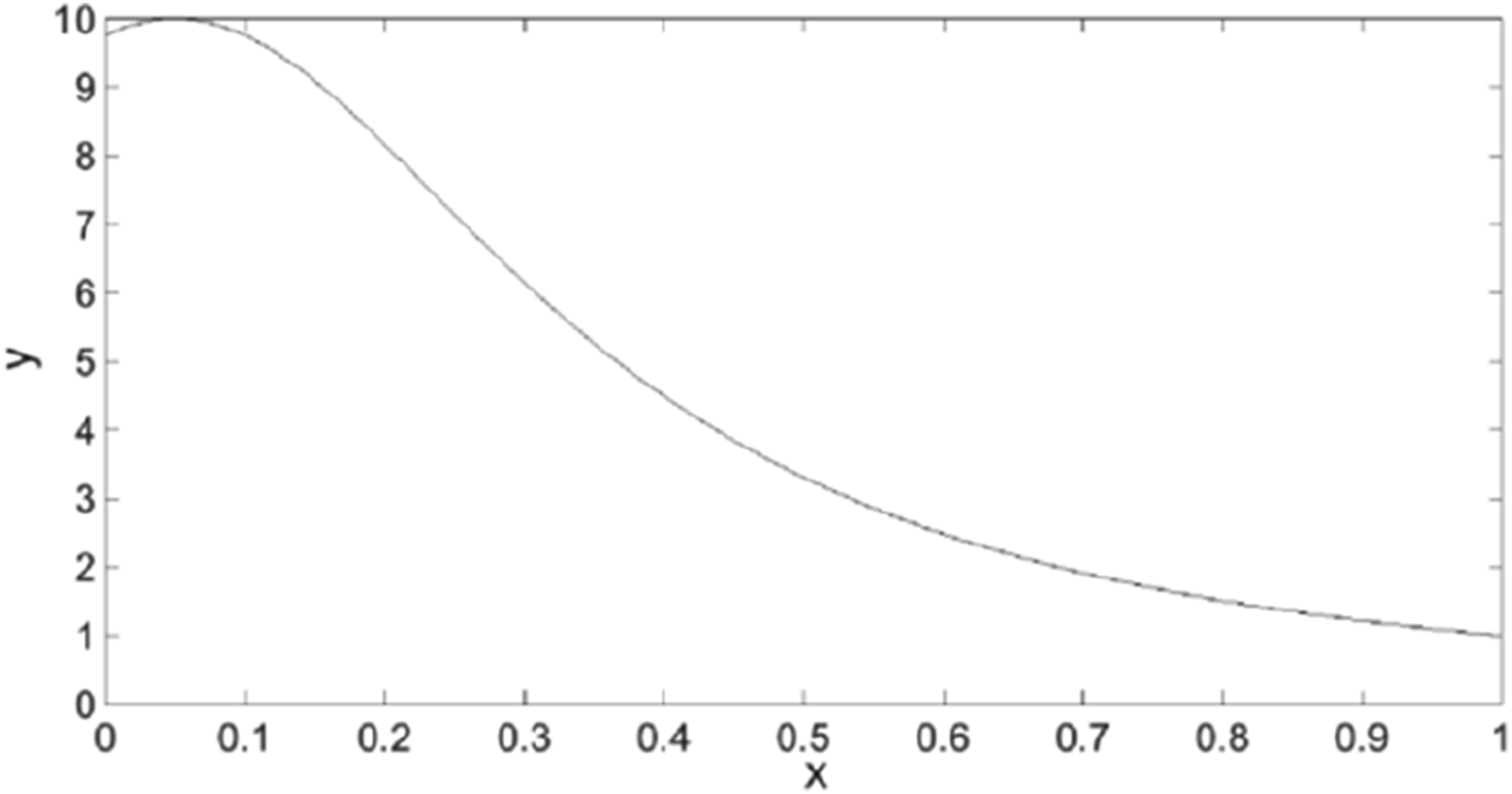

VMD parameters are optimized by PSO with different fitness functions.

Although the fitness function can reach the optimal value when any term of
The emergence of the aforementioned situation may be related to the improper selection of evaluation indicators for the decomposition effect of the VMD method. Let the signal VMD decomposition effect evaluation indexes vary with different parameter K values (with 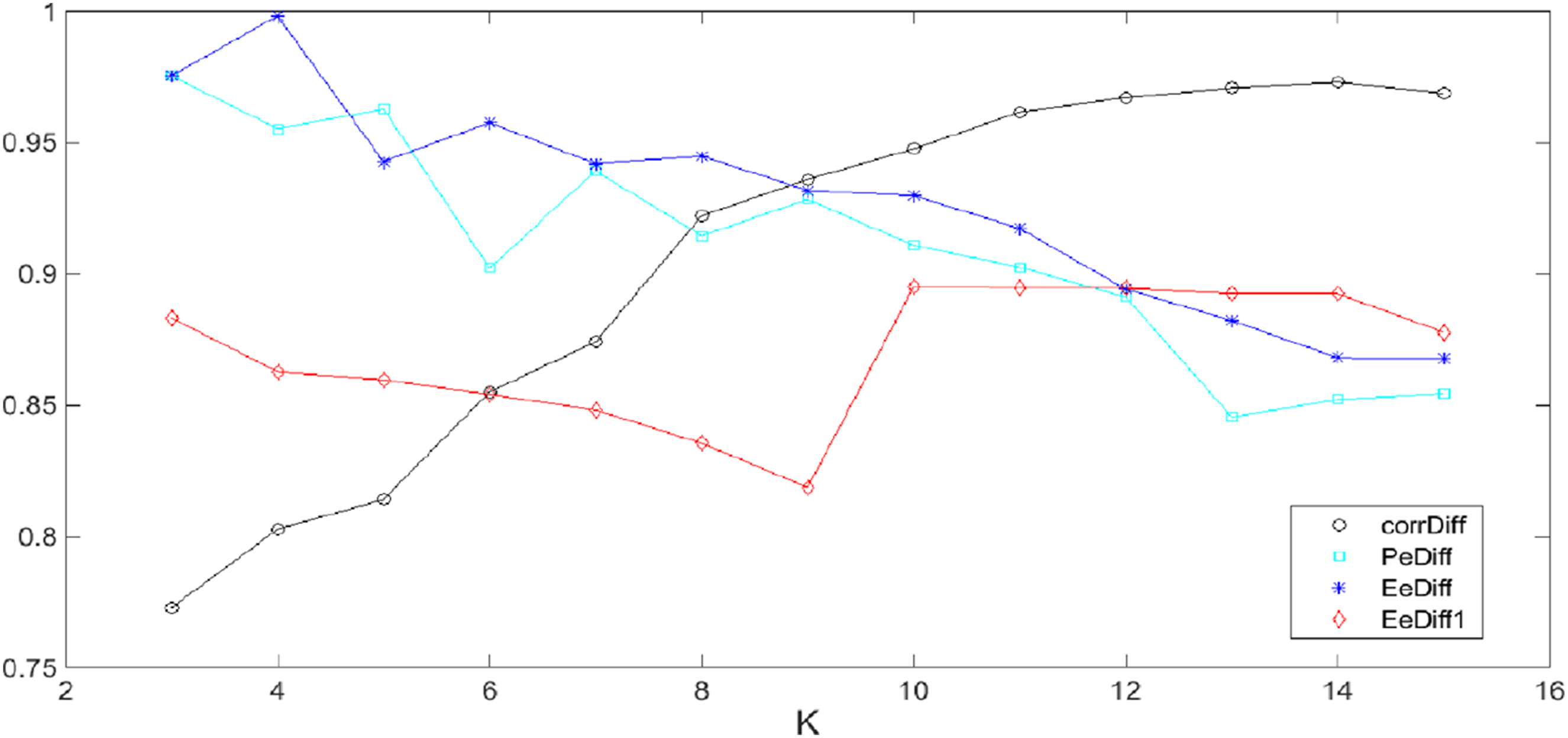
The 20 illustrations in Figures 6–8 indicate that the component
For cases involving a combination of different parameters, the envelope entropy of the VIMF component with the strongest correlation with the original signal is recorded as VMD decomposition effect evaluation indexes vary with different parameter VMD decomposition effect evaluation indexes vary with different parameter 

The three figures indicate that the effect evaluation indexes of the VMD method for signal
Second, the permutation entropy of the difference between
Third, the envelope entropy of
Finally, the envelope entropy of the VIMF component with the strongest correlation with the original signal, denoted by
The comparative observation has ignored two or more interactions that can affect the parameters, and this aspect may be only the result of the local relative optimal results but not the global best results.
In summary, the influence of the three parameters (number of modal layers K, modal frequency bandwidth control parameter (or quadratic penalty term)
4. Improved parameter-optimized VMD method
For nonlinear and nonstationary signals without prior modal information, in view of the aforementioned single-objective optimization method’s failure to obtain a robust VMD parameter of the number of modal layers K, the modal frequency bandwidth control parameter (or quadratic penalty term)
Multi-objective functions should be employed to restrict each of the objective functions and optimize the VMD parameters. As discussed in Section 3.2, it is time-consuming to determine the optimal VMD parameters by using different parameter combinations and performing VMD processing to obtain different decomposition effect measurement indicators. Subsequently, comparing and weighing comprehensively the functions is not entirely objective. Consider each experiment in which K,
The MOPSO algorithm is a multi-iteration optimization algorithm based on population inspiration, and it has strong local and global optimization capabilities, 61 which is suitable in determining the optimal VMD parameters. Therefore, on the basis of the introduction of the MOPSO algorithm, an adaptive VMD parameter-optimized method based on the multi-objective particle swarm algorithm is proposed in this section to adaptively determine the proper selection of VMD parameters in the process of identifying the characteristics of nonlinear and nonstationary signals.
4.1. Multi-objective particle swarm optimization algorithm
Optimization problems in the real world are often multi-attribute in nature, and two or more goals are generally optimized at the same time. The most excellent development of a country involves many aspects, such as rapid economic growth, stability of social order, and environmental protection and improvement. 62 The two optimization goals of rapid economic growth and social order stability here are complementary and mutually reinforcing—a virtuous circle—and are usually consistent.
In many cases, two or more goals optimized at the same time are not only complementary but also interactive yet conflicting. For example, in the production activities of a company, the quality of the product conflicts with its production cost. 62 The corporate leadership usually comprehensively considers the conflicting subgoals to achieve the optimization of the overall goal. That is, each subgoal is considered to be compromised to the plan and the production management. 62 Such a problem of comprehensive and compromised consideration of multiple sub-objectives is often called a multi-objective optimization problem.
For a single-objective optimization problem, only a single optimal solution exists, and it can be obtained using relatively simple and commonly used mathematical methods. However, for a multi-objective optimization problem, each objective restricts the other objectives, and the performance of a single objective is often improved at the cost of losing the performance of the other objectives. Determining a solution to optimize the performance of all objectives is impossible. 62 One of the considered principles is the Pareto efficiency principle, referring to an ideal state of resource allocation. That is, for an inherent group of people and resources assumed for allocation, when the allocation state changes from one to another, one person at least becomes better with the assurance of the situation that no other person becomes worse. The multi-objective evolutionary algorithm (MOEA) can optimize the multi-objective problem (MOP) according to the Pareto principle and other strategies. As one of the MOEAs, MOPSO is featured with the advantages of fewer parametric settings, good convergence at high speed, and simple calculation. As such, MOPSO is widely used to solve multi-objective optimization problems, such as color image fusion, 63 location identification of automatic voltage regulators in distribution networks, 64 network security optimization, 65 multi-objective calibration of reservoir water quality modeling, 66 hybrid renewable energy system design, 67 structured optimization of airborne radar radome, 68 satellite image pixel classification, 69 earthquake emergency response strategy optimization, 70 and multi-feature selection and classification of image or text. 71 For the convenience of problem description, this section introduces some basic concepts of multi-objective optimization problems, the framework, and the steps of the MOPSO algorithm.
4.1.1. Basic concepts of multi-objective optimization problems
4.1.1.1. Global optimum (minimum)
Suppose a single-objective function f, 
Then, the specific function value of f,
4.1.1.2. Multi-objective optimization problem
As aforementioned, the multi-objective optimization problem in specific engineering applications involves reasonable compromise considerations of multiple objectives with various competitive relationships and mutual inhibitions. Without loss of generality, an optimization problem with a real D-dimensional decision space is investigated. A parameter set P must satisfy the following relationship:
The decision vector x corresponds to a point in the D-dimensional decision variable space
4.1.1.3. Pareto optimal
The MOP-optimized solution exists in the form of compromise substitution, which is called the Pareto optimal set. Each objective component of any non-dominated solution in the Pareto optimal set can only be improved by deteriorating at least one of the other objective components. 62
For any 
or at least one 
then the special solution
4.1.1.4. Pareto dominating
If ① all of the objectives function of the feasible solution ② at least one objective function of the feasible solution is superior to that of, that is,
4.1.1.5. Pareto optimal set (non-inferior optimal solution)
For a given multi-objective optimization problem 
4.1.1.6. Pareto front
For a given multi-objective optimization problem 
That is, a special solution in the Pareto front always dominates any feasible solution in the feasible solution space.72,73
In general, finding the analytical expressions containing the frontier (line or surface) of these Pareto optimal solution set is impossible. Only through constant calculation and a search of feasible solutions
The abovementioned analysis only explains the related concepts of the optimization problem with two objectives. Furthermore, the term of two objectives can be extended to that of multi-objectives according to the need of a specific problem, which is not repeated in this section due to the paper’s space constraints.
The Pareto dominance-related problems of the optimization problem with two objectives are plotted in Figure 15 to be able to explain in detail the Pareto optimal front and the Pareto dominance problem. With the optimization objectives Pareto dominance and Pareto optimal front Ref.
72

From the perspective of the objective space, the hollow circle F is dominated by the hollow circles D and E and the filled circles A, B, and C. The hollow circles D and E are dominated by A, B, and C. That is, F is dominated by all other feasible solutions, and solutions D, E, F are not Pareto optimal solutions. The filled circles A, B, and C are not dominated by each other, and they are not dominated by other feasible solutions. The search process is continued until no feasible solution can dominate A, B, and C. Then, the connection of A, B, and C constitutes a Pareto front.
4.1.2. Framework and steps of the MOPSO algorithm
Coello 74 compared PSO with other evolutionary algorithms and proposed that the PSO with the Pareto sorting scheme may be a direct and effective method to expand the processing of multi-objective optimization problems.
The historical record of the best solution found by the particles (i.e., individuals) can be used to store the non-dominated solutions generated in the past history, which is similar to the elitism concept used in other evolutionary computing methods. 74 Moreover, the combination of the global search mechanism and the external archiving of the non-dominated vectors discovered in history can encourage the iterative process to converge into a more optimal dominated solution and into non-dominated solutions. 74 The external file can also be used to store the local and global optimal solutions generated in the iterative process. The external file contains individuals that are not dominated by any other particles and individuals that dominate some feasible solutions in the external set.
The flowchart of the MOPSO algorithm is shown in Figure 16. The specific steps are as follows
74
: (1) Particle population initialization: Randomly specify the initial position and velocity of the particle according to the value range. (2) Preliminary calculation: Calculate each fitness function value according to the regulations and the initial position of the particles. Calculate the non-dominated solution and store it in the (3) Local optimization: Define each particle coordinate according to its fitness function value. Then, the position in the objective function is formed into a hypercube, and the initial individual optimal position (4) Update particle position and velocity and update (5) Maintenance of external file (6) Judge whether the iteration can be stopped: When the number of iterations has not reached Flowchart of the MOPSO algorithm Ref.
72

In the entire iterative process of the optimization algorithm, either the global optimal solution or the selection of the particle’s historical optimal solution is expected to greatly impact the optimization result. In each iteration, a new global optimal solution is generated, and other particles are guided to move (or fly) in space or constrained space based on the position of the global optimal solution.74–76 In the optimization process of MOPs, a set of global optimal solutions is generated in each iteration, and only the optimal solution selected among them may guide the next particle flight to the convergence direction. Lalwani 75 greatly contributed to the selection of external files, mutation strategies, and constraint control to improve the effectiveness of MOPSO, established a set of optimization problem test functions, and formulated evaluation indicators regarding the advantages and disadvantages of the algorithm, such as iteration distance, error rate, and spatial distribution. Although the indicators are convenient and effective and eventually applied in this study, they are not detailed here given the paper’s space limitations.
4.2. Proposed VMD parameter optimized method
As mentioned in Section 3.2,
The proposed method employs (1) Input the nonlinear and nonstationary signal (2) Initialize the position and velocity of the MOPSO algorithm according to the value ranges of the VMD parameters, and calculate a set of initial particle values. (3) Perform VMD decomposition on the signal by using the assigned parameter values. Then, calculate the fitness function of each particle position corresponding to the state, compare and obtain the fitness value, and update the external file with the non-inferior dominance solution that meets the requirements. (4) Update the particle position and velocity, and adjust the optimal fitness function value and optimal parameter value. (5) Judge whether the iteration stop condition is reached, that is, whether the number of iterations (6) Perform VMD decomposition on the signal by using the obtained VMD parameters in the external archives to obtain the correct and effective frequencies and other characteristic parameters.
The external file set here has multiple combinations of optimal values, and the parameters also have multiple optimal values.
4.3. Simulation experiment and verification
The experimental analysis on the multi-component frequency modulation signal with The three-objective optimization result graph via AVMDbMOPSO processing.
The optimal VMD parameters list of the signal

The ten sets of parameter combinations are subjected to VMD decomposition. Each set can gain a good VMD decomposition effect, one of which is drawn in Figure 18. The VMD decomposition effect is clearly good, and the five frequency components and noise items of the original signal are well identified. In the VMD algorithm analyzed above, the proper selection of the K is proven to be the most important parameter, followed by Time-frequency diagram obtained by VMD with optimized parameter combination.
As for the parameter
The same experimental analysis on the multi-component frequency modulation signal
In summary, the AVMDbMOPSO method can effectively and reliably perform a time–frequency analysis on nonlinear and nonstationary signals, and it may help to gain a more perfect decomposition effect, suggesting its superiority to the existing VMD parameter optimization methods. The AVMDbMOPSO method is expected to guarantee effective feature identification and analysis of actual bridge GNSS monitoring data.
5. Application in dynamic characteristic identification of bridge GNSS monitoring data
To assess the effectiveness and advantages of the proposed VMD parameter optimization strategy, this study utilizes the same GNSS monitoring data from the Sutong Yangtze River Highway Bridge as referenced in 18 . The Sutong Bridge is a double-tower, double-plane steel box girder cable-stayed structure spanning 8146 m in total length, with a main span of 1088 m and a main cable tower reaching 300.4 m in height. It is situated downstream of the Yangtze River, connecting Nantong and Suzhou in eastern Jiangsu Province, and is frequently affected by summer typhoons. Combined with daily and seasonal temperature fluctuations, these environmental factors significantly challenge the precise positioning of the superstructure. To meet the high standards of geometric alignment, elevation control, dynamic response monitoring, and tower deviation assessment during construction, a remote real-time dynamic monitoring system based on GNSS technology was established. This system continuously captures the geometric and structural behavior of both towers and girders in real time. 25 GNSS receivers were installed on the tower tops immediately after the roof sealing. Given that the natural frequency of such large cable-stayed bridges is typically below 5 Hz, a 10 Hz sampling rate was adopted in accordance with the Nyquist theorem, enabling effective acquisition of vibration signals and contributing to the safe construction of the bridge.
The bridge GNSS monitoring data series was transformed into the bridge axis coordinate system, and then averaged. Then the x, y, and z coordinate sequences are all actually parallel or perpendicular to the bridge axis, which will lead to the analysis results more consistent with the actual situation of bridge vibration. The data were collected from the GNSS monitoring point in the bridge axis coordinate system on the north bridge tower. A section of x-direction monitoring time series data starting at 20:32 on December 26, 2006, with a duration of 500 s was analyzed. Then this x sequence was decomposed by AVMDbMOPSO method. The setting of the proposed parameters here is the same as that in Section 4.3. The obtained multi-objective value of the external file set of the multi-objective optimization (an inverse function transformation is conducted) is shown in Figure 19. The mutual restriction of the three objectives is also well compromised. The optimized VMD parameter sets are listed in Table 3. The figure and table both show that the evaluation indexes of the decomposition effect of the VMD decomposition on the bridge monitoring data tend to be close after multi-objective optimization, but they are different. In the optimized VMD parameters, the value of K is always 10, the value of Three-objective optimization result via AVMDbMOPSO processing on the bridge GNSS monitoring data. The optimal VMD parameters list of the signal 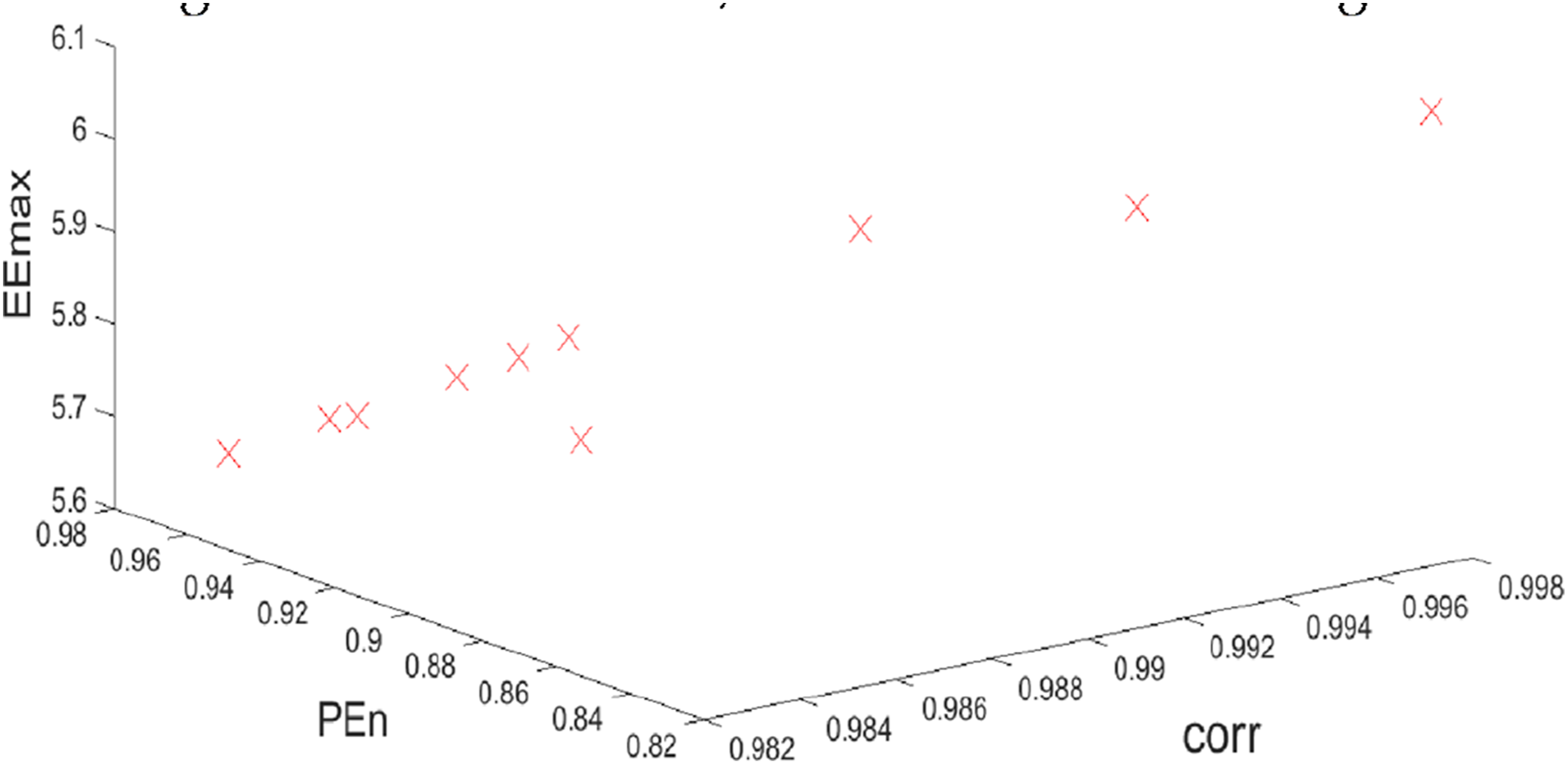

These results indicate that although the selected VMD decomposition evaluation indicators are mutually restricted and exclusive, the multi-objective equilibrium optimization of MOPSO can contribute to the achievement of a compromise. The result of K value (always 10) verifies that the AVMDbMOPSO method is robust to any signal analysis unlike the unstable K value optimization results of some existing methods.
The ten sets of parameter combinations are subjected to VMD decomposition. Each set of data can gain a good VMD decomposition effect, one of which is drawn in Figure 20. For the bridge GNSS monitoring data with unknown prior frequency information, especially the number of modal layers K, the VMD parameters can be optimized to such a result by adopting the proposed method. In the time–frequency diagram, the VIMF1 component is indeed the irregular fluctuation of the signal as a whole, and the trend is shown in Figure 20. Moreover, the VIMF2 component has an obvious vibration frequency of 0.156 Hz whose amplitude can reach 7.6. The conclusions are the same as the QGA-ASR analysis in Ref.
18
. Furthermore, low amplitudes at 0.744 and 2.544 Hz can be observed in the subsequent VIMF components. This trend may be a multi-order frequency characteristic of the bridge vibration, which requires further analysis and verification. Time–frequency relationship obtained by VMD with optimized parameter combination from VMDbMOPSO.
The proposed method was used to decompose the other parts of the x and y coordinate sequences for the point. AVMDbMOPSO has a similar decomposition performance. In addition, the main natural vibration frequencies in the x- and y-directions in each section is 0.156 Hz. The graphs and results obtained in these cases are omitted to save space. The same frequency of the bridge vibration in the x- and y-directions was obtained in other section from the two monitoring points in a single hour; hence, the bridge was safe at that time.
6. Discussion
Bridge GNSS monitoring data exhibit complex nonlinear and nonstationary characteristics, making frequency extraction challenging with any single method. This study contributes a practical decision framework for method selection and proposes an adaptive VMD parameter optimization approach (AVMDbMOPSO) to address this limitation. The key contribution is the AVMDbMOPSO method, which automatically optimizes VMD decomposition parameters using multi-objective particle swarm optimization. This enables accurate frequency extraction from complex, noise-contaminated signals without manual parameter tuning.
Based on our findings, the following application guidelines are proposed: (1) Regular excitation: FFT or HHT suffices when the main frequency is prominent. (2) Noisy environments: EMD-based methods, particularly PSEEMD,
16
are recommended when spectral features are obscured. (3) Subtle condition changes: The adaptive stochastic resonance method
18
effectively detects minor frequency shifts near the natural frequency for early damage warning. (4) Complex multi-modal signals: Standard VMD can extract dominant frequencies when modal layers are known. For uncertain cases, AVMDbMOPSO provides optimized parameters for more accurate decomposition.
In summary, this study provides both theoretical insights and practical tools for bridge GNSS monitoring, with the proposed AVMDbMOPSO method advancing adaptive, high-precision structural health assessment.
Recent “wave-shaped” vibrations observed on the Humen Bridge 77 highlight the critical importance of detecting subtle frequency changes. Even minor, long-term frequency shifts may indicate accumulating structural damage that could eventually lead to major events like sudden deck vibrations.
The proposed AVMDbMOPSO method addresses this need by enabling precise frequency extraction in complex scenarios. For sudden vibration events, AVMDbMOPSO optimizes VMD parameters to accurately identify the new dominant modal frequency. When investigating specific causes (e.g., plastic enclosure removal), pre-event GNSS data processed by EMD or PSEEMD 16 establishes baseline frequencies, while post-event data analyzed via adaptive stochastic resonance 18 detects any shifts, allowing causal verification.
For routine bridge monitoring under both stable and variable conditions, EMD-based methods, particularly PSEEMD, are recommended to obtain reliable baseline frequencies. These serve as reference points for detecting accumulated “small changes” that inform structural health assessments.
Due to current limitations, full validation across complete bridge lifecycles—from construction to potential failure—remains unrealized. Future work aims to obtain such long-term monitoring data to further validate and expand the applicability of these methods.
7. Conclusion
VMD is an effective time-frequency analysis method for nonlinear and nonstationary signals, demonstrating superior performance in decomposing signals with variable frequencies. However, its main limitation lies in the difficulty of predefining optimal decomposition parameters (e.g., mode number and noise level) without prior signal knowledge.
To address this, how each parameter affects decomposition quality is analyzed, and a MOPSO-based multi-objective optimization framework that automatically determines optimal VMD parameters by balancing multiple evaluation indices is proposed. Case studies validate the method’s effectiveness and reliability, while application to real bridge GNSS monitoring data confirms its practical utility for engineering applications. The robustness of the method with respect to different noise levels, sampling rates, and signal characteristics will be studied and discussed, and whether the optimized parameters are case-dependent will be clarified in future work.
Footnotes
Acknowledgments
This research was supported by Key Project of Guizhou Provincial Basic Research Program (Natural Science) (No. Qian Ke He Basic ZD [2025] 098).
Author contributions
Wang: Conceptualization, Methodology, Software, Writing – original draft, Writing – review & editing, Funding acquisition. Luo: Writing – original draft, Data curation, Formal analysis, Investigation, Validation, Visualization. Liu: Writing – review & editing, Resources, Supervision, Project administration.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Key Project of Guizhou Provincial Basic Research Program (Natural Science) (Qian Ke He Basic ZD [2025] 098).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request and with permission.