
Abstract
The autopilot positioning process is mainly affected by three aspects: the first is the spatial geometric distribution of positioning sensors; the second is the screening of spurious observations; and the third is the equivalent ranging error. A constrained positioning method based on the geometric distribution of FitzHugh–Nagumo (FHN) neurons is proposed. To reduce the geometric accuracy factor, a Horizontal Dilution Of Precision value algorithm with a weight factor was proposed by considering the spatial geometric distribution of base stations and the geometric relationship of anchor points. This paper proposes a geometric constraint data processing method for the error of the pseudo-observation value. Finally, considering the significant weak signal perception ability of the biological nervous system, and the stochastic resonance phenomenon caused by noise can enhance the ability of the neuronal system to detect weak signals, an ultrasonic receiving method based on the stochastic resonance characteristics of FHN neuronal system is proposed, to enhance the signal and reduce noise. The results show that under the optimized base station layout and data geometric constraint processing, the ultrasonic wave based on FHN neuron improves the accuracy of spurious observations, reduces the calculation amount of geometric constraint processing, and reduces the positioning error by 66.67%, which provides a new direction for improving the positioning accuracy.
Keywords
Introduction
High-precision and continuous and reliable position, speed, and pose information are one of the core technologies for unmanned driving applications.1–3 This paper mainly discusses positioning accuracy. Because Horizontal Dilution Of Precision (HDOP) is an important index to measure the positioning accuracy of satellite systems, it is necessary to optimize the HDOP value.
In order to improve the positioning accuracy, the base station position positioning that satisfies the small geometric accuracy factor must be selected. 4 The detailed derivation process of HDOP value is given in literature. 5 Since the calculation of the HDOP value only considers the influence of the spatial geometric distribution of the observation base station, the obtained HDOP value cannot accurately reflect the positioning accuracy. Literature 6 proposed a Position Dilution of Precision value calculation method considering the weight. Bo and Shao 7 studied the weighted geometric accuracy based on the Geometric Dilution Of Precision (GDOP) star selection algorithm. Lui et al. 8 proposed a fast satellite selection strategy based on a fuzzy precision factor. To reduce the computational burden of the receiving sensor, literature 9 proposed an improved algorithm to quickly calculate the geometric accuracy factor (GDOP), which was based on the QR decomposition of the matrix, and avoided the problem of real-time reduction of the positioning solution caused by a large amount of computation and storage of the traditional algorithm. Although the location of the base station is very important, the processing of pseudo-measurement data is also one of the important means to improve positioning accuracy.
Ultrasonic sensors under the influence of the external environment impact or vibration interference source, observation data are inevitable in the process of positioning error of the larger point, so the geometric constraint solving 10 pseudo measurements of error can be avoided, the literature11,12 use of positioning data processing method of geometric constraints, is one of the writers association of positioning data and processing method. It is based on Blumenthal embedding theorem in distance geometry. Literature13,14 proposes that the geometric constrained weighted least square method can be used to construct the objective function so that it can be applied to the situation where the measurement errors of multiple sensors are different or even related. In literature 13 dealing with the pseudo-observation value of positioning data, the role of geometric constraint relationship in the correction of observation error was elaborated in detail. At the same time, a constrained optimization model was established, and the observation error was eliminated by the SQP method. The main reasons for the pseudo-observation data not conforming to the geometric constraints include the asynchrony error of the terminal and the base station, the NLOS propagation error, the random error caused by bandwidth and signal-to-noise ratio, etc. 15
In order to reduce the large error of spurious observation data and reduce the calculation amount of data geometric constraint processing, it is necessary to accurately detect the ultrasonic front signal to improve the accuracy of ultrasonic AOT (Time of flight). The methods of ultrasonic denoising have been reported in a large amount of literature, among which the wavelet analysis algorithm mainly includes wavelet packet method 16 and wavelet packet threshold method. 17 The wavelet analysis algorithm has unique advantages for the processing of acoustic signals with obvious characteristics in both the time domain and frequency domain, 18 but the size of the threshold has a large error in time measurement. Literature 19 proposes a precision ultrasonic ranging method based on the adaptive wavelet denoising method, which automatically selects the optimal threshold and effectively improves the signal-to-noise ratio of the received signal, thus improving the accuracy of time-of-flight extraction. Signal denoising methods include spectrum separation, 20 feedback neural network 21 and dynamic double threshold method. 22 The above methods are all based on denoising. In recent years, stochastic resonance has achieved rapid development in the field of weak signal feature extraction. The stochastic resonance phenomenon caused by noise can enhance the ability of the neuronal system to detect weak signals. Considering the significant weak signal perception ability of the biological nervous system, the neuronal system can be used to receive ultrasonic signals. The most classical neuron is Hodgkin–Huxley (H–H) model. 23 On this basis, other commonly used models include FitzHugh–Nagumo (FHN) model, 24 Ermentrout model 25 and Morris–Lecar model. 26 Literature 27 found that appropriate noise is beneficial to the propagation of shark neural cell membrane oscillation signal. Literature 28 studied that under the action of signal and Gaussian white noise in the FHN neuron model, the pulse signal of a neuron will reach a maximum with the increase of noise intensity, so the stochastic resonance phenomenon appears. This indicates that stochastic resonance may be a general phenomenon in neural information perception and processing.29,30 Because the FHN model can be used to describe the relationship between neuronal membrane potential and afferent stimulation, and many neural computational simulations have been carried out on neuronal dynamics represented by H–H and FHN model, 31 the FHN model is selected as the basic model of the neuronal system in this paper.
In summary, in order to improve the positioning accuracy, firstly, the layout of the base station is optimized, and the weight factor is added based on the traditional calculation of HDOP value, and the geometric relationship between the positioning point and the base station is considered. Since the points with unsatisfactory HDOP values need to be repeatedly located to obtain a large number of spurious observations, to screen out the optimal set of data, a geometric constraint data processing method was proposed. Finally, because the accuracy of the pseudo-observation value depends on the time accuracy of the first acoustic front signal detected by the ultrasound, this paper proposes an ultrasonic receiving method based on the stochastic resonance characteristics of the ultrasonic FHN neuron system. The above methods were numerically simulated, and the distribution of the base station was optimized by selecting the plane accuracy factor with added weight. The minimum positioning error could be achieved by using the geometric constraint processing of the data and the stochastic resonance property of the ultrasonic FHN neuron system.
Optimization of base station layout based on HDOP
Effect of baseline length on calibration accuracy
In the positioning process of the automatic guidance vehicle, the position of the ultrasonic instrument is often not selected, which leads to the low accuracy of the positioning data. Therefore, it is necessary to analyze the accuracy of the ultrasonic position. Assume that the vehicle is equipped with two ultrasonic emission sensors to determine the pose of the automated guided vehicle. In this paper, the distance between two receiving hyperspectral wave sensors is defined as the baseline distance, and its distribution is shown in Figure 1.

Distribution of the positioning system.
In Figure 1, four ultrasonic receivers S1, S2, S3 and S4 are distributed, and transmitters R1 and R2 located on the diagonal of the automated guided vehicle have diagonal lengths R. Assuming that R1 is the anchor point, the true distance between S1 and R1 is




The coefficient matrix A can be expressed as follows:








Geometric accuracy factor of the base station for long baseline positioning. (a) S1 and S2 were used as positioning base stations (b) S3 and S4 were used as the positioning base stations.
It can be seen from the above figure that the smaller the area of the triangle with the positioning target and the positioning base station as three points, the larger the HDOP value. The geometric accuracy factor reaches the maximum value of 140 at the coordinate point (20,0) in Figure 2(a), reflecting that the closer the positioning target is to the two base stations, the larger the geometric accuracy factor is. Therefore, the smaller the volume of the unit vector shape, the larger the error of the positioning data. In this case, the selection of the location of the base station is based on the maximum triangle area criterion of the positioning target and the positioning base station.
The sensitivity of positioning error to measurement error can also be measured by error sensitivity


Geometric accuracy factor of the base station for short baseline positioning. (a) S1 and S4 were used as positioning base stations and (b) S2 and S3 were used as the positioning base stations.
By the above knowable, geometric dilution of precision is shown in Figure 3. A coordinate point (0, 10) peaked at 70, and in the same anchor point, from the quantitative relation to the baseline length ratio is the ratio of approximately equal to the geometric dilution of precision, so choose a short baseline point of the base station as an ultrasonic receiving sensor location point, can make the geometric dilution of precision greatly reduce, improve the positioning accuracy. However, when S1, S4 or S2, and S3 are selected as the positioning base station, the geometric accuracy factor near the baseline is high, resulting in large errors in the measurement data, which cannot meet the positioning accuracy required by HDOP. According to the conclusion drawn above, the shorter the baseline length, the higher the accuracy of HDOP, so S1, S2 and S1, S4 are selected as the positioning base stations, and the changes of the maximum value of HDOP when the length of the two baselines is reduced are shown in Figure 4.

Relationship between reduced baseline length and maximum Horizontal Dilution Of Precision (HDOP).
Figure 4 shows that the HDOP value is the smallest when the baseline distance is reduced by 5.8 m in the X-axis direction and by 2.9 m in the Y-axis direction. Because the baseline length is too small in the limited planning range and the positioning base station is too close to each other, the receiving sensor works approximately as one sensor, so the baseline continues to shrink after the curve reaches the lowest point, and the HDOP value increases approximately linearly or exponentially. In the X-axis direction, the optimal base station positions of S1 and S2 are (2.9,0) and (37.1,0), respectively; in the Y-axis direction, the optimal base station positions of S1 and S2 are (0,1.45) and (0,18.55), respectively. These optimized positions are obtained, and the simulation of HDOP is shown in Figure 5.

Distribution of Horizontal Dilution Of Precision (HDOP) after optimization of the base station. (a) After the S1 and S2 positions were optimized (b) After the S1 and S4 positions were optimized.
As can be seen from Figure 5(a), the maximum value of HDOP after optimization is 100, and the reason for the increase of HDOP on both sides is that it is far from the original base station. In Figure 2(a), the maximum value of HDOP reaches 142. Compared with Figure 2(a), the value of HDOP decreases by about 42, greatly increasing the positioning accuracy coefficient. Figure 5(b) shows that the maximum value of HDOP after optimization is 50. In Figure 3(a), the maximum value of HDOP reaches 71. Compared with Figure 2(a), the value of HDOP decreases by about 21. Although the positioning accuracy after baseline length optimization is greatly improved, the geometric accuracy factor error after optimization can still greatly affect the positioning of AGV (qualified geometric accuracy factor ≤3). Therefore, the number of positioning base stations is co-selected under the principle that the more the number of positioning base stations is satisfied, the higher the positioning accuracy is.
Analysis of the number of base stations
After the previous analysis, the double send + double receive ultrasonic sensor positioning system in the geometric accuracy factor analysis of positioning data error is large. Considering that the ultrasonic dual receiving sensors cannot meet the positioning requirements of AGV in terms of geometric positioning accuracy; however, increasing the receiving sensors will improve the data error. The number of receiving sensors is increased to 3, and S1, S2, S3 and S1, S2 and S4 are the base station points, respectively. The final shadow influence relationship of geometric accuracy is shown in Figure 6. The number of positioning base stations was increased to four, and S1, S2, S3 and S4 were selected as positioning base stations, as shown in Figure 7.

Analysis of positioning accuracy of three receiving sensors. (a) S1, S2, and S3 were used as positioning base stations (b) S1, S2, and S4 were used as positioning base stations.

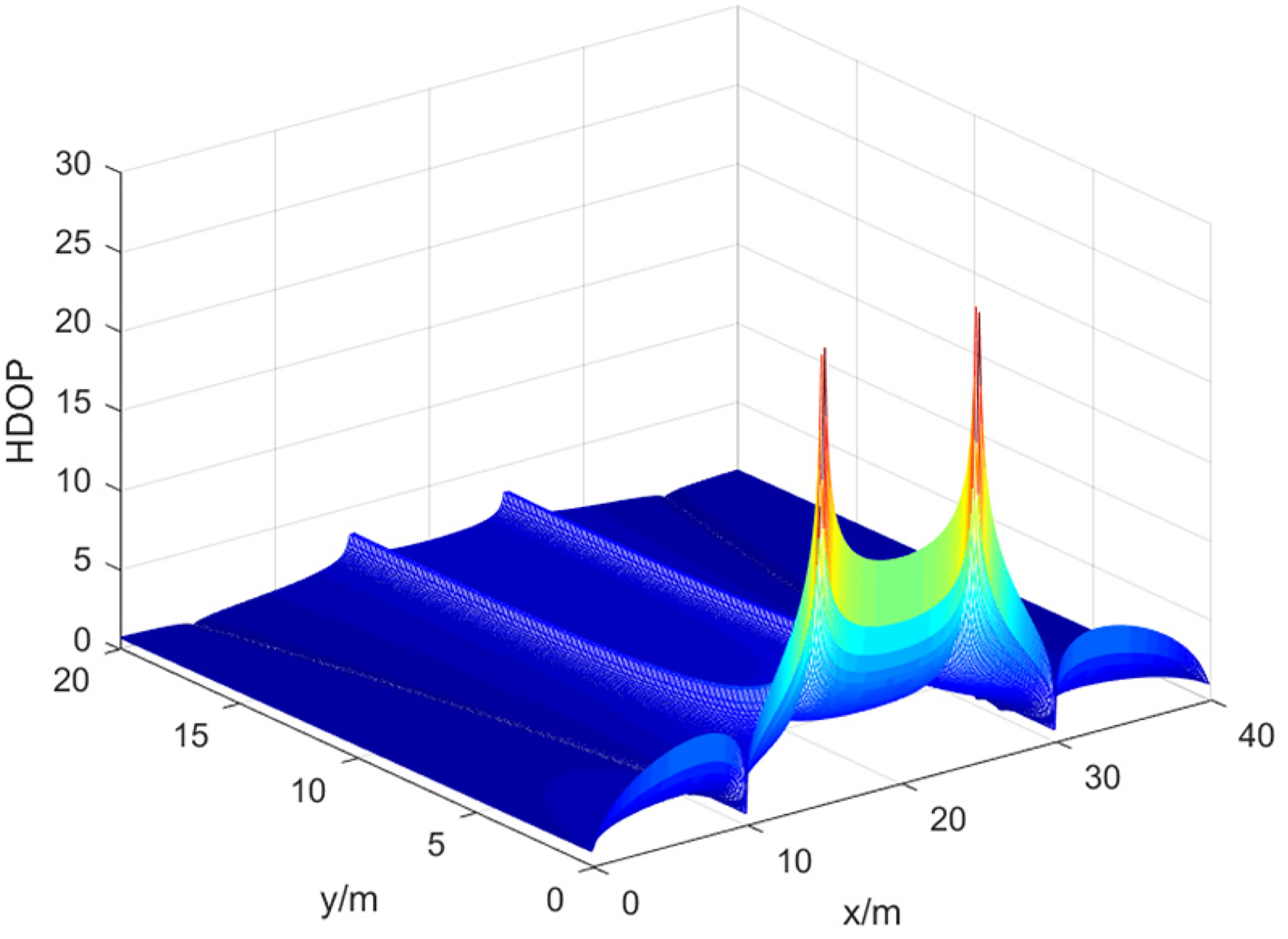
Horizontal Dilution Of Precision (HDOP) analysis of the four positioning base stations. (a) 3D diagram of HDOP at four base stations (b) Top view of the four-base station HDOP.
As can be seen from Figure 6, base stations S3 and S4 are added, respectively, on the basis of base stations S1 and S2. Since S3 and S4 are highly symmetric in the positioning area, the maximum value of HDOP in Figures 6(a) and (b) is 3.35. Although the maximum value of HDOP decreased significantly, the HDOP increased by 1 unit in the whole positioning area. Since the positioning data of two sensors can determine the position, adding sensors can greatly reduce the HDOP value near the maximum HDOP value point. However, multiple data repositioning at the smaller unit HDOP values of the two sensors will lead to error superposition. As shown in Figure 7, when the number of positioning base stations is increased to 4, the HDOP value in the area is significantly reduced (geometric accuracy factor ≤3), and AGV positioning with low accuracy can be satisfied at this time. The maximum value of HDOP is generated at the center of the positioning area. This is because at the center, excessive repositioning makes the error accumulation too large, so it is necessary to set a weighting coefficient for each base station to ensure the superiority of the data and improve the positioning accuracy.
HDOP value calculation method and fusion algorithm for adding weights
In equation (10), it can be seen that the elements in the involved matrix are related to the position of the positioning base station, and in turn, the position of the positioning target affects the data of the receiving sensor. According to Effect of baseline length on calibration accuracy, it can be seen that: The maximum area of the triangle formed by the positioning target and the positioning base station is used as the selection principle of the location of the base station. Therefore, within the limited range of sensors, the error of the positioning target far from the positioning base station will be smaller than that of the nearby sensor. Therefore, the error of the measurement data is related to the positioning Angle θ, as shown in Figure 1. (Positioning Angle: the Angle between the line segment and the baseline is measured.) Therefore, the positioning Angle θ is taken into account in the calculation process of HDOP value, so the weight matrix Q is introduced, and its expression is as follows:



Accuracy analysis of the weighting algorithm with S1 and S2 as base stations.
As can be seen from Figure 8, the maximum value of HDOP is 27. Compared with Figure 2(a), the maximum value of HDOP decreases from 142 to 27, and the HDOP value decreases by 80%. However, in the position where the original positioning was stable, the fluctuation occurred after weighting. The main reason was that the measurement error in the positioning area changed with the position after weighting optimization. The HDOP value can be greatly reduced by selecting the baseline length and optimizing the weighting algorithm.
Next, we discuss the HDOP value of the fusion algorithm under the positioning condition of four base stations, that is, after the fusion of the two optimization methods. After the simulation experiment of selecting the baseline length, it can be seen that the baseline length on the X-axis is 34.2 m, and the baseline length on the Y-axis is 17.1 m, so the coordinates of the four base stations are selected as follows: S1 (2.9,1.45), S2 (37.1,1.45), S3 (37.1,18.55), and S4 (2.9,18.55), and the simulation results are shown in Figure 9.

Horizontal Dilution Of Precision (HDOP) with fusion weighting algorithm and preferred baseline length. (a) HDOP 3D plot of the fusion algorithm (b) HDOP color bar map of the fusion algorithm.
As can be seen from Figure 9, after the fusion algorithm from HDOP maximum value point of view, not only did not decline, and a slight increase. These increased HDOP values are mainly distributed around the base station and the symmetrical double line (mainly distributed on six lines), this kind of phenomenon is mainly because the base station around the point error gets too close to the base station. The surrounding points are weighted with θ angles to improve the error accuracy, and exactly the points with high HDOP values have undesirable θ angles, leading to distortion of the observed values after fusion. On the whole, the HDOP value is reduced on the whole, which can meet the positioning requirements of AGV.
Processing of ultrasonic positioning data
Blumenthal embedding theorem
Let



①
② For positive integers u and v that satisfy
Geometric constraint processing method for data
According to the layout of Figure 1, assuming that only taking a point R1 as positioning the research object, which can be according to their point (S1, S2, S3, R1, ‘S4) distance, can be regarded as a structural measure matrix D, R1 for two-dimensional plane space point set in order, which anchor point to the various stations of pseudo measurement data,








Data simulation experiment
According to the layout of Figure 1, anchor point R1 (7, 13) as the true location, spread to R1 ultrasonic signals to the base station of time
Geometric constraint processing of measurement data.
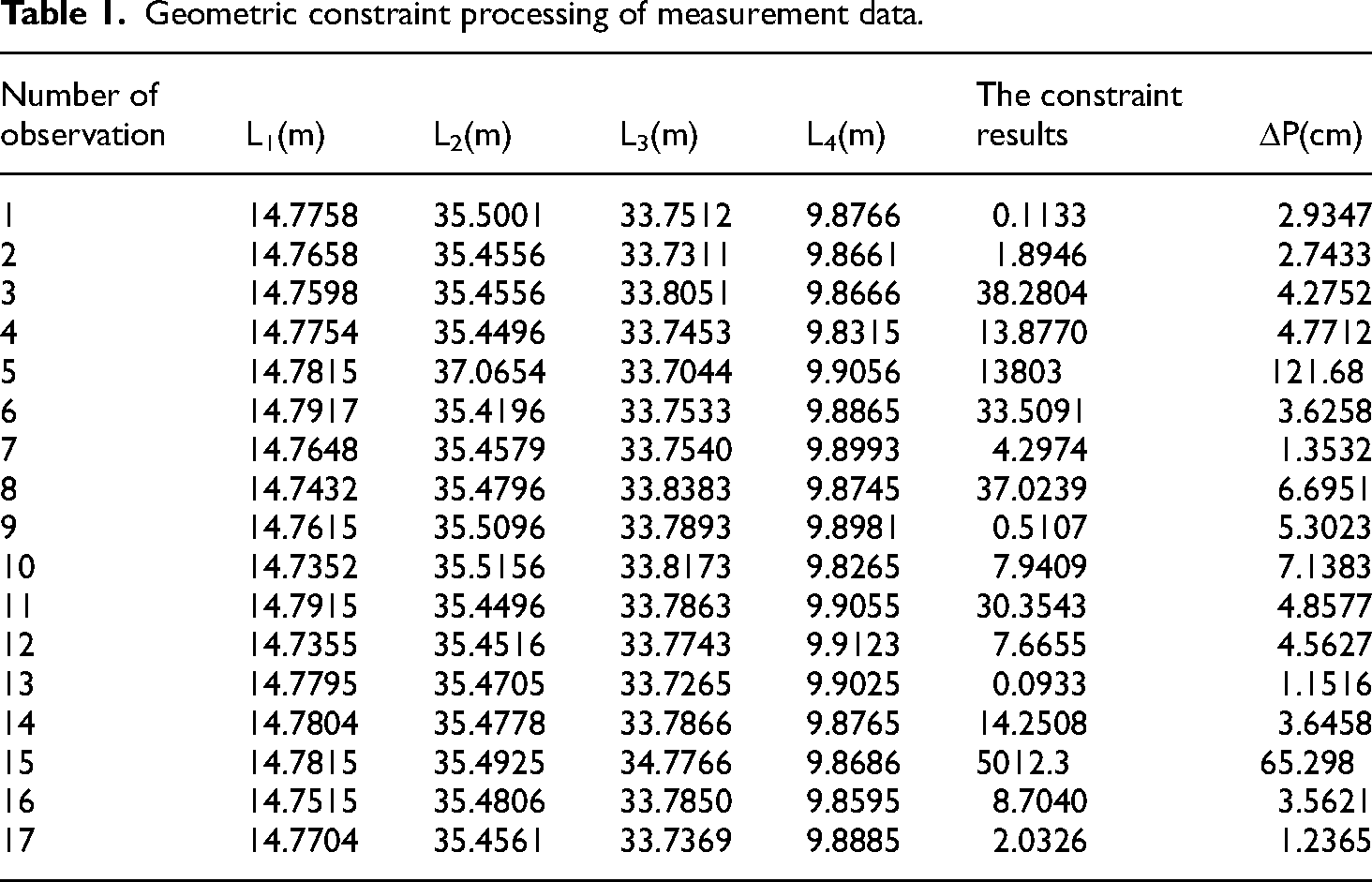
It can be seen from Table 1 that there are large errors in the 5 and 15 groups of data. When the geometric constraint relation is used to process the data, the result seriously exceeds the value of 0, which does not have the geometric relation due to the measured data, and the final plane error reaches 121.68 cm, seriously deviating from the real location. Find constraint on the 17 sets of data, the results of the minimum numerical group (13 sets of values for the minimum 0.0933), and then use this set of data to locate the calculation, the surface error is 1.1516 cm, in the real position in the process of ultrasonic is unlikely to achieve the accuracy, the main reason is that, there will be a time delay error detection of ultrasonic signal. As a result, it is difficult for the signal detection sensor to capture the first time point when the ultrasonic signal arrives, resulting in the measurement distance being larger than the real distance, which is also an important reason for the error of the ultrasonic wave. It is still possible to achieve this accuracy if the number of measurements is enough, but this will undoubtedly increase the computational load and the number of measurements may be far more than 17, so it is necessary to optimize the ultrasonic signal processing.
Study on ultrasonic optimization based on neuron
Basic model of FHN neuron
At present, there have been many studies on biological neurons, which can be traced back to Hodgkin and Huxley, the famous British physiologists, who studied voltage transmission between biological neurons and established the famous H–H model of the biological nervous system. Later, some scholars established a simpler FHN model based on H–H, which greatly retained the essential characteristics of neurons. The model is as follows
24
:
The ultrasonic wave always carries noise in the process of signal transmission, which leads to the delay when receiving the sensor to analyze the signal, to reduce the positioning accuracy. Stochastic resonance (RSR) is a nonlinear phenomenon produced by the system under the cooperative action of signal and noise, that is, noise helps the system to detect the signal. Therefore, the ultrasonic signal carries a certain intensity of noise, which can improve the ultrasonic detection ability under stochastic resonance. According to equation (28), the change of neuronal membrane potential after linearization can be expressed as:


Neural network unit (black-filled circles are inhibitory cells and white-filled circles are excitatory cells).
It can be seen in Figure 10 that the transmission direction and length between each neuron are different, that is, the offset direction in which each neuron makes a decision will affect the stochastic resonance of ultrasound and noise with the system. Based on the above analysis and inspired by the neuron dynamics model, the dynamic characteristics 
FHN neural network is used to enhance and filter weak signals
Since neurons can respond to a variety of different signal stimuli and can effectively transmit information, a variety of noisy information-denoising experiments are carried out on the model, and the parameters c = 0.65, d = 0.15 and b = 1 are set. The input signal in this paper is a sinusoidal signal with an amplitude of 1.26 and a frequency of 60HZ. The specific input form is as follows:

Filtering results of sinusoidal signals from bilevel neural network units. (a) Original signal (b) Noise-containing signal (c) First-order filtering signal (d) Second-order filter signal.
It can be seen from Figure 11, where Figure 11(a) is the original signal, and Figure 11(b) is the signal after adding noise. It can be seen that the original signal is almost distorted, and the original information is lost. Figure 11(c) is obtained after first-order filtering of the FHN neural network unit, and it can be seen that the outline of the original information is obtained, carrying the basic information. After the second-order filtering, the signal is restored, and the signal is enhanced.
To verify the effectiveness of the FHN neural network unit in processing various signals, the neuron network parameters c = 1.2, d = 3 and b = 1, and the input ultrasonic stimulation signal: amplitude 1.26; Ultrasonic attenuation coefficient 0.1; Echo signal observation time 1; 40 KHZ frequency. The carrier is a cosine signal, and its expression is:

Ultrasonic signal filtering results of two-layer neural network unit. (a) Ultrasonic source signal (b) The signal-to-noise ratio was 10 (c) First order filtering signal (d) Second order filter signal (e) The second-order filtered signal is locally amplified at the pullback front.
As can be seen from Figure 12, when the ultrasonic signal is added with Gaussian white noise with an SNR of 10 dB, it is difficult for the ultrasonic receiving sensor to detect the echo front signal. Therefore, to suppress the noise, the voltage comparator is often set with threshold voltage in the actual circuit. The ultrasonic wave with white Gaussian noise is filtered by FHN neural network unit in the first order, and Figure. 12(c) is obtained. It can be seen that white Gaussian noise is well-filtered. Compared with the signal without processing, the threshold set by the ultrasonic receiving sensor can be smaller, and the measured propagation time accuracy is higher. As shown in Figure 12(d), the ultrasonic wave is effectively reduced after second-order filtration, but the wave line shows abnormal fluctuation in the intermittent time, mainly because the stochastic resonance cannot be generated in the intermittent time, showing weak noise information. Figure 12(e) shows that the echo front can produce a good filtering effect during the vibration time, and the peak point of the vibration gets signal enhancement under the stochastic resonance phenomenon.
Numerical simulation
According to the positioning points (7,13) of the layout in Figure 1, the observation errors are equal and all are zero mean white noise. The positioning errors of short baseline and long baseline, three positioning base stations and four positioning base stations, and four positioning base stations and are processed by fusion algorithm are, respectively, simulated and compared. The observation errors are equal, and 40 dB of white noise is added. Based on the four positioning base stations and the fusion algorithm, the positioning errors are numerically simulated and compared with the geometric constraint processing method and the FHN neural network. Assuming that each base station is independent of each other with standard deviation

Comparison of each numerical simulation. (a) Comparison of numerical simulation of long and short baseline errors (b) Three, four positioning base station error numerical simulation comparison (c) Four positioning base stations are compared by numerical simulation using fusion algorithm (d) With or without a geometric constraint processing (e) With or without an FHN neural network.
As can be seen from Figure 13(a), the positioning accuracy of short baseline is higher than that of the long baseline, which is consistent with the HDOP value calculated in Effect of baseline length on calibration accuracy. The positioning accuracy is inversely proportional to the length of the baseline, so the short baseline positioning base station is preferentially selected. As shown in Figure 13(b), the positioning error of three base stations is slightly higher than that of four base stations, but it is not obvious. From the simulation HDOP value, it can be seen that there is no significant difference between the values of three base stations and four base stations. The position with a large positioning error of three base stations is close to the S2 base station, and point (7,13) is not in this area. As shown in Figure 13(c), there is no significant difference in the positioning error of four base stations with or without the fusion algorithm, because, at this time, the HDOP value is already small (geometric accuracy factor ≤3), so it is not obvious to improve the positioning accuracy. If the positioning accuracy needs to be further improved, the pseudo-observation value needs to be treated with geometric constraints.
As can be seen from Figure 13(d), the positioning accuracy of the data processed by geometric constraints is significantly improved, and the data that do not conform to the geometric relationship are screened, to eliminate the cumulative error of multiple positioning. At this time, the plane positioning error is ±2 cm, and the root cause of this error is the ultrasonic signal detection error. Because it is difficult for the ultrasonic receiving sensor to capture the first time of acoustic front in a noisy environment, the measurement distance is often larger than the real distance. Therefore, the principle of FHN neural network and stochastic resonance is used to filter and preprocess the ultrasonic wave. As shown in Figure 13(e), the error is reduced to ±1 cm based on geometric constraint processing, and the error at this time meets the positioning requirements of the automated guided vehicle.
Conclusions
The influence of different position distributions of multiple base stations on the accuracy factor HDOP is analyzed. It is verified that the positioning performance of the four-base station is better than that of the three-base station, but the HDOP value obtained by the four-base station simulation is not ideal in the center of the positioning area. A method for calculating the HDOP value of the weighting factor is proposed. According to Blumenthal's embedding theorem, the localization data are subjected to geometric constraint processing, and the optimal set of localization data is selected. At the same time, the rationality of the weight factor is proved. When ultrasonic localization is used, the main error is that the ultrasonic receiving sensor is difficult to capture the first signal time of the acoustic front in a noisy environment. Considering the significant weak signal perception ability of biological neurons, an ultrasonic receiving method based on the stochastic resonance characteristics of the FHN neuron system is proposed, and the following conclusions are drawn:
The baseline length had a great influence on the HDOP value. The HDOP value calculation method of the weighting factor optimized the unsatisfactory anchor points in the center of the positioning region on six lines, which greatly increased the unsatisfactory anchor points. Geometric constraint processing filters out the geometric relationship that does not have the due geometric relationship of the measurement data, which can improve the accuracy of the positioning point and prove the rationality of the weighting factor. The FHN neuron system is used to filter the sinusoidal and ultrasonic signals with Gaussian white noise. The results show that the FHN neuron system can filter out the noise well and the stochastic resonance can enhance the signal. Ultrasound based on FHN neurons reduced the localization error by 66.67% under the optimized base station layout and data geometry constraint processing.
Footnotes
Acknowledgements
This work is financially supported by Science and Technology Plan Project of Guizhou Province (Grant No. ZNWLQC[2019]3012).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is financially supported by Science and Technology Plan Project of Guizhou Province (grant number ZNWLQC[2019]3012).
Author biographies
Weiwei Li is a master's student of Guizhou University, mainly engaged in deep reinforcement learning and theoretical control application research, has a novel research on intelligent vehicle positioning and data processing.
Sen Yuan is a professor and master tutor of the School of Mechanical Engineering, Guizhou University. His research direction is advanced manufacturing technology and process research.
Zhou Xiaorong is a doctoral candidate at Guizhou University, specializing in intelligent transportation and advanced manufacturing technology.
Long Qin is a master's student at the School of Mechanical Engineering, Guizhou University. Her research interests are advanced manufacturing technology and intelligent vehicle research.
Yue Xi is a master student in the School of Mechanical Engineering, Guizhou University. His research direction is: tool innovation design and tool failure mechanism research, and he has deep insights on the accuracy of machine tools.