
Abstract
Past swarm intelligence algorithms for solving UAV path planning problems have suffered from slow convergence, lack of complex constraints and guidance for local optimisation. It no longer meets the requirements of the Multi-UAV Cooperative Reconnaissance Mission Planning (MUCRMP) problem in the context of multi-radar detection. In this paper, a global optimisation model with the objective of a shorter distance within radar detection range of the UAV is proposed at first, including the planning of reconnaissance sequence between and within target groups, relative position to targets. More importantly, the imaging characteristics of the UAV and its minimum turning radius have been considered in depth in this study. Then an improved synthetic heuristic algorithm is proposed to solve the model, which obtains valuable reconnaissance mission plan. Finally, an example solution for a problem with 68 target point sizes is carried out, and the validity and feasibility of the model and algorithm are illustrated through the analysis given. Compared with the existing algorithms, the improved synthetic heuristic algorithm can give better anti-radar attributes to the UAV and efficiently improved the convergence speed in the specific reconnaissance mission.
Introduction
UAV can play the role of reconnaissance, intelligence, and surveillance in air combat, and has also begun to be applied in the fields of communication relay, electronic warfare, and anti-submarine warfare in recent years.1-4 Therefore, because of the strategic position of UAVs in modern area search and strike forces, they receive a lot of attention. The main task of UAV operations is to plan their path. The main objective of this task is to design a flight path to the target at the lowest combined cost, including the lowest probability of damage, the least amount of reconnaissance time and other factors, while meeting the performance requirements of the UAV. Because the mission execution environment of UAVs is relatively harsh, a single UAV can easily be countered by radio radar and other anti-reconnaissance equipment, interfered with, or even destroyed during the execution of the mission.5,6 Therefore, the cooperative reconnaissance of multi-UAV is particularly important.
Multi-UAV path planning is a prerequisite for multi-UAV cooperative reconnaissance. To efficiently complete the established combat missions, multiple UAVs must be researched and assigned.7–9 The process of mission planning usually involves professional knowledge in the field of control, operations research, decision theory, synergetics, information theory, artificial intelligence, communication theory and so on in academic areas.10–13
Taking mission requirements and environmental factors under multiple constraints into account, multi-UAV cooperative reconnaissance mission planning (MUCRMP) is an extremely complicated and challenging task.14–18 Furthermore, since MUCRMP is a traveling salesman problem essentially,19–21 it is an NP-hard problem in terms of complexity,22–26 and there is no method to find the optimal solution in the polynomial algorithm time, which increases a certain degree of difficulty for MUCRMP.
In recent years, many scholars have been engaged in the research of MUCRMP. Most of the research work focuses on the use of intelligent random search algorithms for optimization, such as ant colony optimization (ACO), 27 particle swarm optimization (PSO), 28 simulated annealing (SA) 29 and genetic algorithm (GA).30–32 In addition, part of the researchers pay attention to mission planning based on game theory33–35 and opportunity learning methods. 36 Chen et al. 27 propose a cooperative task assignment model and use ACO to solve it considering various targets under multiple constraints. Gao et al. 28 combine an improved two-stage resampling method with PSO and apply it to the UAV task assignment. Turker et al. 29 establish a reasonable task clustering optimization index and use SA combined with it to match the reconnaissance order. Ruan et al. 33 compare several existing metaheuristic optimization algorithms and propose a new method based on GT to analyze and design alliance formation games to determine the coverage deployment plan of UAVs. Yang et al. 36 propose a novel searching algorithm with the opportunity learning method to carry out the path planning mission and conduct a certain mathematical analysis of the search strategy for the UAVs maneuvering assignment. Although the content of these studies is related to the mission planning in the reconnaissance process of UAVs, they only pay attention to the situation where all UAVs take off from the same base. Some research shifted to the area of multi-base multi-UAV cooperative reconnaissance mission planning (M-MUCRMP),37–39 and solve the model using combined searching algorithms. Despite this improvement in MUCRMP, the problem of how to effectively evade the enemy's radio counter-reconnaissance methods has not been paid attention to in the current research process. There is also a lack of consideration in maneuvering turn for UAVs.
According to the requirements of the battlefield environment, starting from different bases is often more conducive to the successful execution of the mission for multi-UAV, in the process of the mission. Meanwhile, considering the maneuvering characteristic of UAVs and effectively evading detection devices, such as radar, are also issues that need to be resolved urgently. Based on the development of existing UAV mission planning, this paper proposes a multi-radar multi-target multi-base multi-UAV cooperative reconnaissance mission planning
The remainder of this paper is organized as follows. The hierarchical solution model based on the global optimization goal is presented in detail in Section 2. The design process of the proposed ISHA and the assignment of
Proposed model
Problem description
For the detection range of radar, the distance generally refers to the linear distance between the radar station coordinates and the UAVs’ center coordinates in three-dimensional space. However, due to the low cruise altitude of the UAV, the radar detection distance can be approximated as the projection distance on the horizontal plane, for large-scale radar detection. The calculation of the shortest trajectory is also based on the proposed projection distance in a two-dimensional plane.
In terms of sensors mounted on UAVs, the most widely used applications are the unilateral side-view imaging sensor (indicated by S-1) and the downward circle-scanning imaging sensor (indicated by S-2) at present. S-1 has higher imaging resolution and better imaging effect, but it can only be imaged on one side, the imaging range is limited and the flight attitude of UAV is highly required. Compared with S-1, S-2 can detect a larger circular area, but the corresponding imaging resolution is lower. In response to the modern battlefield's requirements for high timeliness and reliability of intelligence information, UAVs carrying different sensors usually conduct reconnaissance missions at the same time or separately.
In a target group where radars are deployed, the projections of the radar detection range on the two-dimensional plane are usually adjacent to each other, and some of the projection areas even overlap. This type of cluster deployment can play a great counter-productive effect on the execution of UAV reconnaissance missions and cause great difficulties for

Deployment modes of radar cluster: (a) Radar cluster with lumpy distribution; (b) Radar cluster with a striped distribution.
Given the characteristics of UAVs, the problem of
Model establishment
In the research process of this paper, the following assumptions are made for further simplification:
The various parameters in UAVs of the same model, such as speed and longest cruise time, are the same, ignoring the performance differences caused by the manufacturing process; The speed of UAVs during the execution of the mission is always equal to the cruise speed, and the duration of take-off and landing is ignored; One of the bases is that within a certain turning radius in which the turning angle is not large, the speed change brought about by a change in direction is not significant. The drones are exceptionally fast and unaffected by power, environment, etc. throughout the process. The impact of maneuvers on the flight speed and fuel consumption can be ignored during the flight of UAVs, such as climb, dive, and turn.


The objective in (1) is to minimise the path distance of the UAV within the radar detection range. This can be equated to the detection time of the radar under the assumption that the speed of the UAV remains constant. Furthermore, the optimisation of the mathematical model subjects to the following constraints
40
.










Model Solving Based on ISHA
In this paper, due to the multiple constraints and complex maneuvering process analysis in
Reconnaissance sequence between target groups
In the light of the complexity of
To lay the foundation for further optimization, we apply a two-stage synthetic heuristic algorithm which is a part of ISHA and combines the nearest neighbor insertion and 2-OPT method, to construct the single optimal route at first The solution process is summarized as follows:
Select the initial target point. In all target points of the mission planning, an appropriate target should be selected as the starting point according to the arrangement of radar cluster and location of the UAV bases, which is recorded as Insert neighbor points. One of the remaining target points Form a complete initial path. The searching process in Step2 is repeated until the obtained path contained all target points that need to be reconnoitered. At this time, the path is the required initial path constructed by ISHA. Set initial conditions for secondary optimization. According to the magnitude of target points, the maximum number of iterations in secondary optimization Flip the reconnaissance order to get a new path. In the path sections with dense target points, a sub-path Optimize the reconnaissance sequence by iteration searching. For the new path obtained in Step5, if the length of the new path is not less than that of the original one, which means Output the result. The searching is stopped when
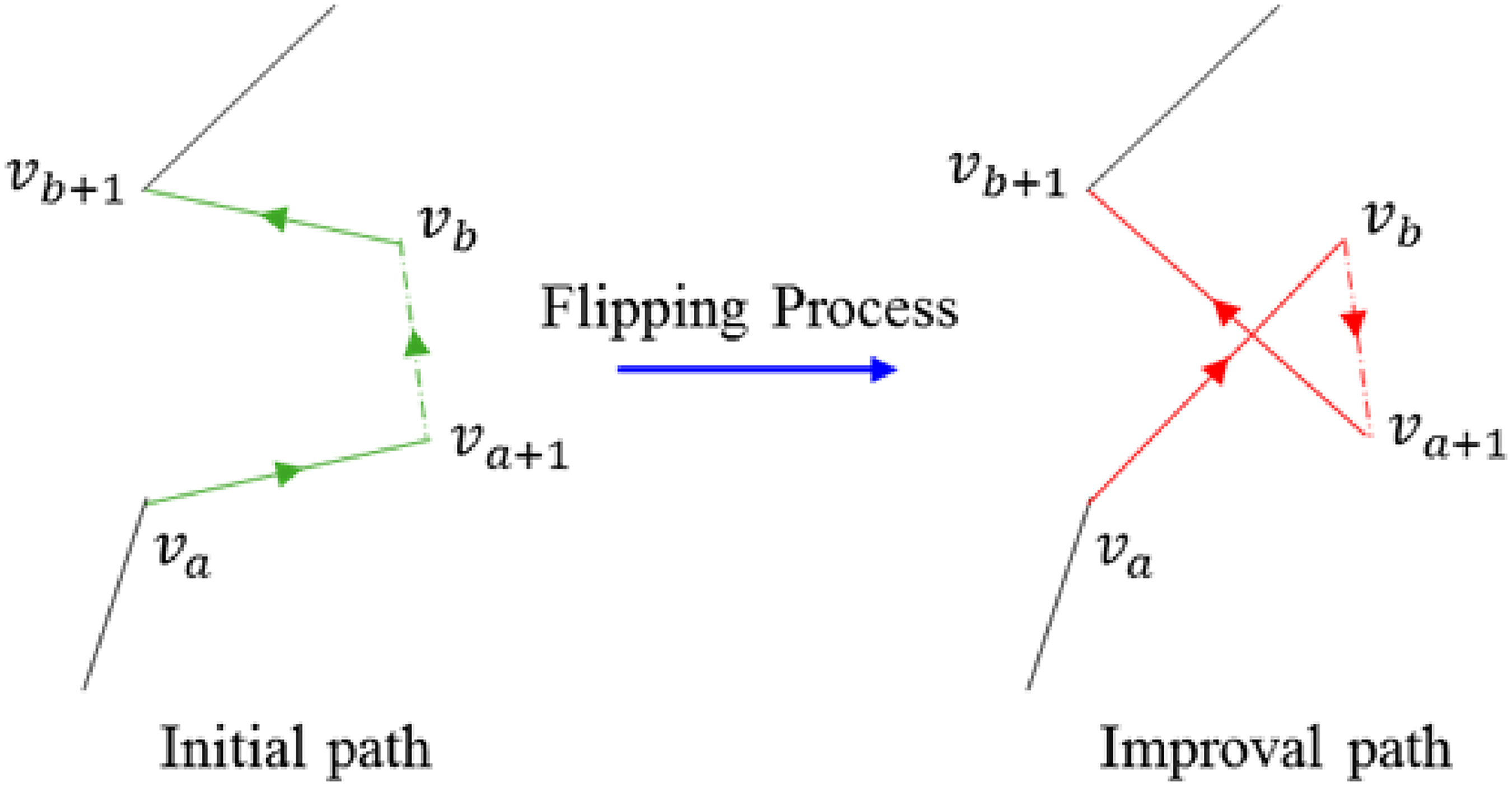
Flipping process of reconnaissance sequence.40

Optimal reconnaissance sequence between target groups: (a) Sequence between target groups with lumpy distribution; (b) Sequence between target groups with stthe riped distribution.
It can be seen from the path planning results that there is no repeated crossing path in the optimized reconnaissance plan. Meanwhile, the extra cruise time can be avoided with all target groups covered, and the reconnaissance sequence between target groups in the radar cluster is effectively planned.
Detailed sequence within target groups
After determining the sequence of reconnaissance paths between target groups, it is necessary to plan specific reconnaissance paths for multiple targets in each target group. In the model-solving process at this stage, the impact of sensors carried by UAVs and their corresponding detection imaging modes on the detection position of UAVs is not considered for the time being. To find the shortest path that can traverse all target points in each target group, the objective in this stage is as follows:

Because the detection imaging mode of the UAV is not considered for path optimization within the target group, it is still only necessary to use the two-stage synthetic heuristic algorithm for the time being. The sequence of the reconnaissance path in the constructed target groups is shown in Figure 4.
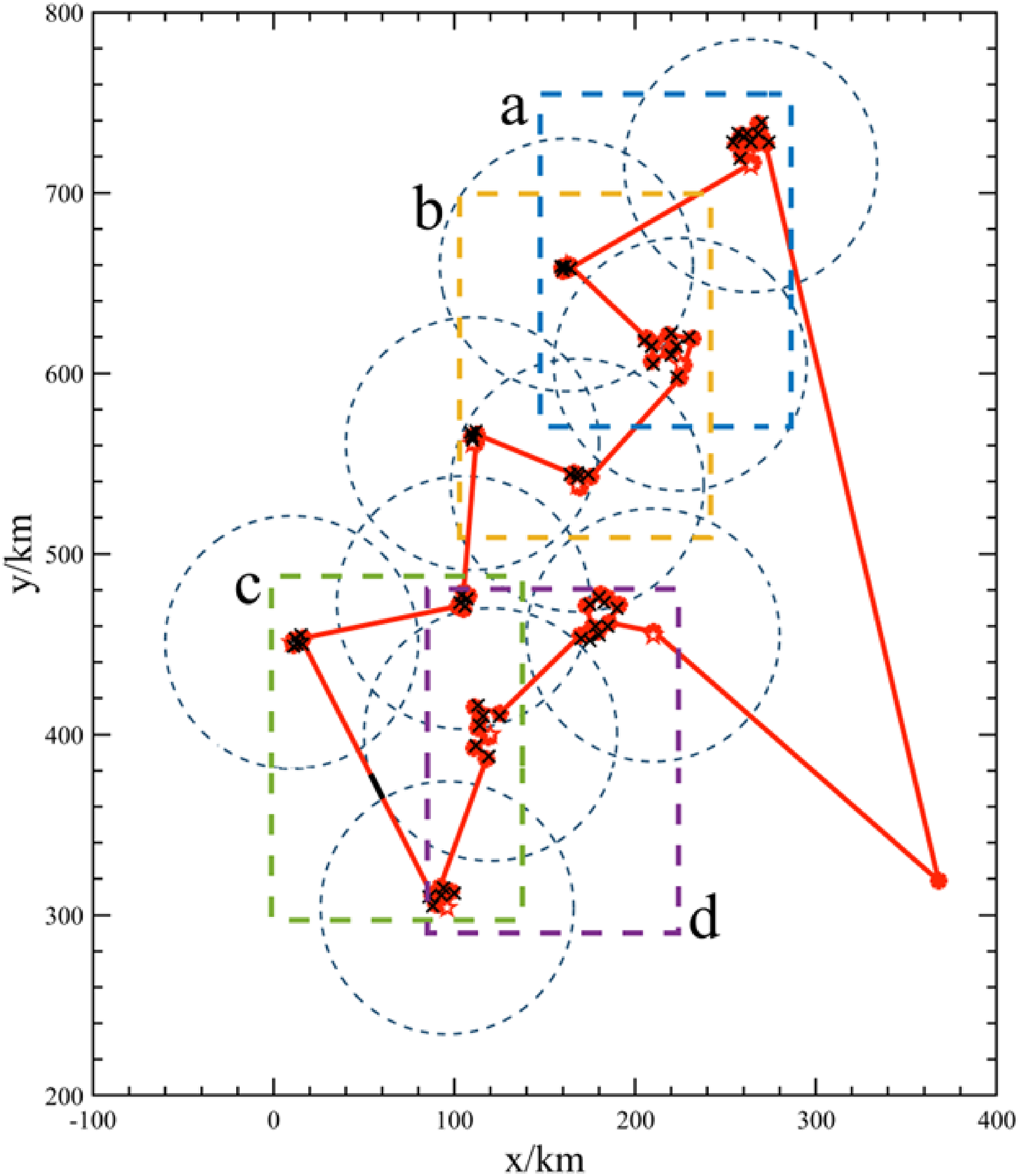
Optimal reconnaissance sequence within target groups. A-d represents magnified path sequence in different sections respectively.
It is obvious from the magnified target reconnaissance sequence that the path connection between the small targets is mainly based on the shortcut connection form, and the coordinate positions of targets belonging to the adjacent group are also taken into account. The result shows that ISHA can not only play a great role in the optimization of the path reconnaissance sequence between large-scale target groups but is also effective when applied to the path planning of small targets within specific target groups.
Location optimization considering imaging sensor
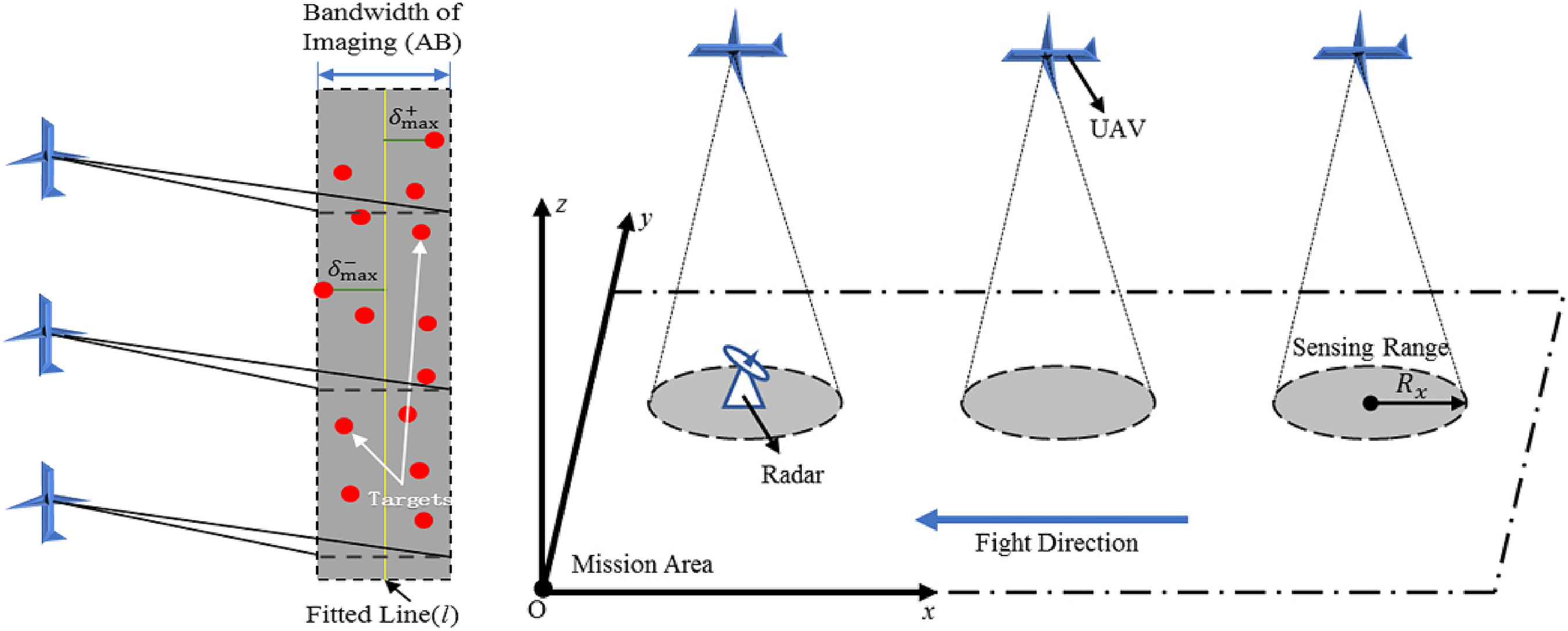
Two imaging sensors are considered for UAVs in this paper. S-1 represents the unilateral side-view imaging sensor, while S-2 represents the downward circle-scanning imaging sensor. The imaging modes of two sensors are shown in Figure 5.
The detection principle of the S-1 imaging sensor (
The UAV's imaging mechanism constraint is considered on the basis of determining the reconnaissance order of each target point to reconnoitre more targets with fewer reconnaissance times. This study focuses on the greedy algorithm of coverage search to form a complete ISHA scheme. The basic idea of coverage search is to include as many points as possible around a selected target point, thus reducing the number of searches.40
For UAVs carrying the S-1 imaging sensors, if the reconnaissance mission is to be completed, the target points need to be within the imaging bandwidth of UAVs in uniform linear motion, according to the distribution characteristics of the radar cluster. The reconnaissance sequence obtained after the first two-stage optimization in ISHA is used as the new optimization objective. The target in the sequence is added into a reconnaissance set in turn starting from the first one until the range of this reconnaissance set exceeds the imaging bandwidth. Then the second reconnaissance set is established till the completion of the whole reconnaissance mission.
Since it is necessary to judge whether the target is within the imaging bandwidth of a reconnaissance set in real-time, target points in the same set need to be fitted with the first-order linear least squares method. As is shown in the top half of Figure 5, the distance between each point and the fitted line l is calculated. In a target set, if the distance between the farthest two points on both sides of l is less than the imaging bandwidth
For UAVs carrying the S-2 imaging sensors, the distance between the reconnaissance position and targets needs to be not greater than the maximum imaging distance. Based on the obtained sequence, the reconnaissance position points which can detect multiple targets at the same time are looked for. The ultimate goal is to reach the requirement that the detection range of UAVs can cover all target points with as little cruise distance as possible.
Because of the characteristics of the S-2 imaging sensor, all target points are taken as the center of each circle, and the maximum imaging distance of the sensor is made to be the radius. Therefore the effective detection range for each target and areas where the detection range overlaps are obtained. According to the previous reconnaissance point and the next target point, the optimal reconnaissance point is chosen in the current area. The specific process is to use a straight line to connect the next target point with the previous reconnaissance point, and then find an optimal point that has the smallest sum of the distance from the two ends of the line to it, as the current reconnaissance point. The coverage searching process is shown in Figure 6, and the path planning result of the UAV carrying the S-2 imaging sensor is shown in Figure 7(b).

The process of determining the reconnaissance point based on the coverage search: (a) General conditions;(b) Special case.

Path planning results of UAVs carrying different imaging sensors: (a) Path planning result of the UAV carrying the S-1 imaging sensor; (b) Path planning result of the UAV carrying the S-2 imaging sensor.40
The path planning results with two different types of imaging sensors show that: The three-stage ISHA fused with the coverage search mechanism can accurately optimize the specific reconnaissance position according to the imaging characteristics of sensors on UAVs.40 It offers a viable technical solution for a more tailored model in complex detection environments.
Maneuvering turn
In the process of determining the sequence and location of the reconnaissance, the movement of the UAV at the turn needs to be optimized according to its maneuvering characteristic. In Figure 8, we determine the coordinates of the reconnaissance point C




The optimization mechanism of maneuvering turn.
So far, the two coordinates,
Final plan
In the above analysis, by fusing the characteristics of the nearest neighbor insertion, 2-OPT method and coverage search, a new ISHA is designed to plan the reconnaissance path. After optimizing the reconnaissance sequence of multiple UAVs, the obtained path is divided and assigned again in view of the current deployment of UAV bases
Example simulation
In this simulation experiment, to make the experimental data and analysis results have certain representation, we choose target groups fusing the characteristics of lumpy and striped distribution. 58 ordinary targets and 10 radar stations are set up, and the effective detection range of the attached radar to the UAV is 70 km. Target points of the radar station are named from A01 to J01 in turn, the other common target points are named according to the cluster division, and the specific division is shown in Table 1. There are also three UAV bases named
Cluster division of target points.

Cruise time in the detection range of radar stations.

Algorithm parameters.

UAVs in this simulation environment are all equipped with the S-1 imaging sensors whose detection bandwidth is 2 km. The cruise speed is 200 km/h, as the longest cruise time and altitude are 10 h and 1500 m respectively. Besides, the minimum turning radius is 70 m and the effective detection range of the radars attached to each target group to the UAV is 70 km. If multiple UAVs are used to perform reconnaissance missions at the same time, the distance between the two UAVs must be less than 200 m. After completing the reconnaissance mission, each UAV needs to return to the original base.
According to the characteristics of the mission example, the hierarchical optimization model and ISHA constructed in this paper can be applied to the above example, for analyzing the optimization problem in the mission instance layer by layer. For the realization of ISHA, the coordinates of bases and target groups, as well as the characteristic data of sensors and maneuvering turn need to be brought into the algorithm process. Firstly, the initial path built on the principle of nearest neighbor insertion is given to traverse all target points. Then the sequence of reconnaissance is flipped to determine a more reasonable path. Lastly, coverage search is applied to get the optimal reconnaissance position based on the obtained sequence and imaging characteristic of the sensor. The result of the final

Final path planning results using different optimization algorithms: (a) Final path planning result using ISHA;40 (b) Final path planning result using AGA; (c) Final path planning result using PSO; (d) Final path planning result using ACO.
It can be seen from the above results that the reconnaissance sequence obtained by ISHA can make UAVs choose paths with the sparser radar coverage. To quantitatively show the comparison of the results obtained by different algorithms, the detection range of each radar station is set to the distance from 30 km to 90 km with the 20 km interval. In this case, the total cruise time of UAVs in different detection ranges can be displayed visually, under the premise of a certain speed. The comparison result is shown in Figure 10, in the form of a three-dimensional histogram. It is proved that ISHA can effectively reduce the cruise time under detection, compared with the other three optimization algorithms, and gives better anti-radar attributes to each UAV.
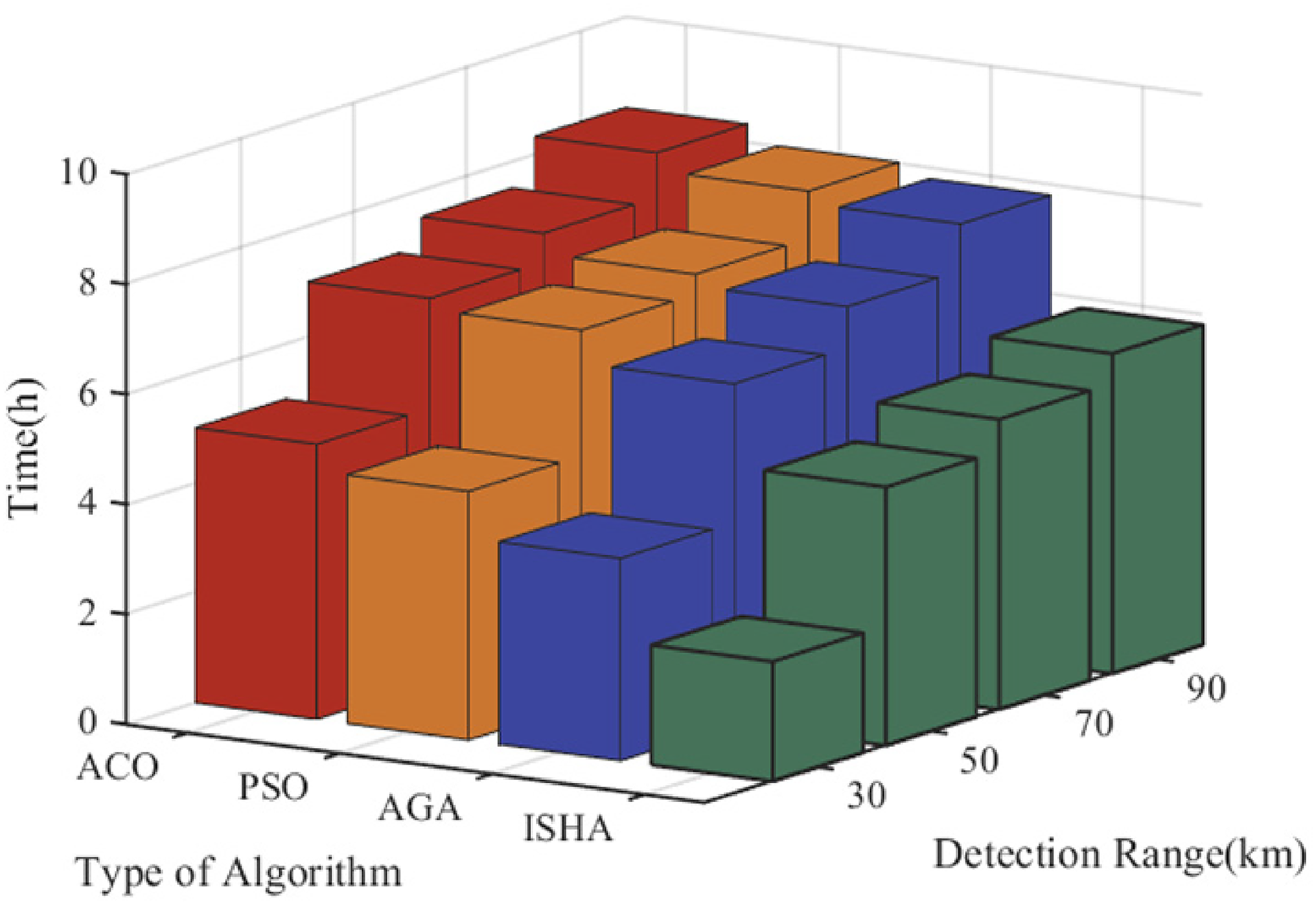
The comparison of UAVs’ cruise time in the detection range of radar stations.
Furthermore, the optimization process of four algorithms with the number of iterations needs to be displayed to test the convergence speed of each optimization algorithm. We set the detection range of each radar station as 70 km. In this case, the convergence process for the algorithms is shown in Figure 11. The simulation results prove that ISHA not only demonstrates outstanding performance in making UAVs avoid radar detection, but also has advantages in convergence speed compared with the other three optimization algorithms.

The optimization process of four different algorithms.
Conclusions
In this paper, we propose a hierarchical mathematical model for
In
To solve the model, we constructed the ISHA according to the characteristics of many existing optimization algorithms. The sequence between and within the target groups is solved first, then the specific reconnaissance positions to target points are found for optimization. Finally, the hierarchical model and proposed algorithm are applied to a mission planning example, with the reliability of the obtained result analyzed. The experimental results show that this novel method can give full play to the combat performance of UAVs, and solve the problem of optimal reconnaissance path planning not only in MUCRMP but also in
But there are also certain flaws in this paper. In the process of building the model, since the flight process of the UAV is a dynamic process, the performance parameters of its various systems may also change continuously with the complex environment and cruise time, which is also a problem that we need to consider further. Moreover, the drone motion is divided into two different ways: constant speed and variable speed. A variable speed will be more in line with the reality of the situation.
In future work, we need to consider the comprehensive impact of more specific environmental factors on multi-UAV coordinated reconnaissance. The UAV's track is no longer just set as a cruise flight maintained at a stable altitude, but changes with terrain or climatic conditions. In addition, the structural differences of UAVs need to be taken into account for further research work.
Footnotes
Author contributions
Conceptualization, Y.S. and Y.L.; methodology, Y.S.; software, Y.S. and B.J.; validation, Y.S, Z.W. and Y.S.; formal analysis, Y.S.; investigation, Y.S.; resources, Y.S.; data curation, Y.S.; writing—original draft preparation, Y.S.; writing—review and editing, Y.S., Y.L., B.J., Z.W. and X.D.; visualization, Y.S.; supervision, Y.S.; project administration, Y.L.; funding acquisition, Z.W. All authors have read and agreed to the published version of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.