
Abstract
Heterogeneous UAVs performing patrol tasks are a new type of border patrol method with high flexibility, high patrol efficiency, and low operating cost In order to improve the ability of heterogeneous UAVs to perform border patrol task, by constructing a three-dimensional complex coordinated planning model, a multi-objective fitness function with the minimum patrol energy consumption and maximum patrol coverage of UAVs in a complex mountain environment is established. Design an improved shuffled frog leaping algorithm (ISFLA) based on spiral search mechanism to solve the problem of task planning in complex mountain environment. The proposed algorithm is verified by simulation experiments. The simulation results show that the ISFLA algorithm for solving the path problem in complex three-dimensional environment has significantly improved the solving efficiency, accuracy and global convergence compared with the particle swarm optimization (PSO), differential evolution (DE) and shuffled frog leaping algorithm (SFLA). The experiments show that the proposed algorithm also has excellent solving ability in solving complex planning problems.
Keywords
Introduction
In recent years, terrorist activities, smuggling, drug trafficking and other forms of crimes harmful to national public security in border areas have gradually shown a diversified and concealed development trend, and traditional border patrol methods have been unable to adapt to the current requirements of border patrol. At present, the lack of border control facilities is serious, and the problems of difficult manual patrols, low patrol frequency and inadequate patrol supervision are becoming more and more prominent, especially in complex mountainous areas, so the adoption of a new patrol method to replace manual patrols has become a new trend in the development of border patrol. Unmanned aerial vehicles (UAVs) have been widely used in the patrol field due to their flexibility, adaptability and low production costs, and heterogeneous UAVs are more adaptable to the environment and meet the needs of the actual patrol process than a single type of UAV for border patrol. Heterogeneous UAVs have also been widely used in power patrols, 1 combat missions, 2 etc.
In complex mountainous border areas, the border patrol environment is more complex and the terrain is more variable, while the patrol frequency and accuracy in the border area are also required to be higher due to the global epidemic, so the energy consumption of UAVs in the patrol process and the coverage of UAVs on patrol points also become one of the main factors affecting the quality of the patrol task. Unlike general patrol methods, UAVs have more environmental and physical limitations in patrolling in complex mountainous environments, so the core problem of performing border patrol missions with heterogeneous UAVs can be approximated as the Multiple Travelling Salesman Problem (MTSP) under complex constraints. 3
At this stage, the research on UAV trajectory planning at home and abroad is mainly focused on the research of multiple UAVs of the same type,4–6 and only a few studies have been conducted on the trajectory planning of heterogeneous UAV groups.2,7 For example, in,8,9 a multi-objective optimization model for UAVs in a mission context was constructed by considering the range cost, altitude cost, and safety cost of UAVs in combination with the constraints on the physical performance of UAVs. In, 10 an optimization model was developed to optimize the energy consumption of the UAV in the process of delivering goods in the process of UAV delivery, considering the reduction of the weight of the goods with the delivery process. In 11 is more specific in analyzing the power output of the power system in each stage of the UAV Logistics distribution process separately to build a mathematical model for the lowest energy consumption of theUAV in the delivery process. In12–14 analyze the motion process of the UAV and build a kinematic model of the UAV, and further consider the mission requirements of the UAV to build an optimized model of the UAV trajectory.
In terms of algorithm solution, the traditional A*15 algorithm, Dijkstra algorithm 16 and other path planning algorithms can quickly and accurately solve the two-dimensional path planning problem, but with the increase of the problem-solving dimension and the complexity of the model, the data needed to be solved increases exponentially. Therefore, the traditional algorithm is difficult to meet the planning requirements in solving the UAV path planning whether the solving efficiency or the solving accuracy. At the same time, because the swarm intelligence algorithm has the advantages of simple structure, high solving efficiency and strong robustness, the swarm intelligence algorithm is also widely used in the UAV path planning. At present, the intelligent optimization algorithm for UAV path planning problem is mainly based on heuristic algorithm, 17 because it has better advantages in solving the UAV path planning problem under complex constraints than the accurate algorithm in solving efficiency and accuracy. Therefore, intelligent optimization algorithms such as heuristic algorithm 18 have become one of the key directions of current domestic and foreign scholars. For example, In the literature19–21 conducted in-depth research on the UAV path planning problem based on genetic algorithm, and literature 22 designed a clustering ant colony algorithm to solve the optimal solution of the established model for the UAV path planning requirements in three-dimensional complex urban environment. In addition, particle swarm optimization algorithm, 23 differential evolution algorithm, 24 frog leaping algorithm 25 and other optimization algorithms are also widely used in the field of UAV path planning.
In summary, the current domestic and foreign scholars in the establishment of UAV planning model mainly consider the energy consumption of UAV in the process of task allocation, and ignore the influence of UAV differences in the process of task execution. At present, only a few literatures have studied the situation of heterogeneous UAVs. At the same time, combined with the task requirements of real border patrols, it is necessary to propose a task planning and track planning method for heterogeneous UAVs for border patrol tasks, so that heterogeneous UAVs are used to perform border patrol tasks more suitable for actual needs. The main innovations of this paper are as follows:
Based on the complex mountainous environment and the dynamic characteristics of UAV, the UAV task planning and track planing model in the quasi-real environment are established; In view of the fact that the optimization effect of the traditional shuffled frog leaping algorithm is excessively dependent on the initialization parameters, an improved hybrid differential based on adaptive step size factor shuffled frog leaping algorithm was proposed and applied to the task planning and path planning of border patrol of heterogeneous UAVs. Compared with the other three frontier algorithms, the solution accuracy is greatly improved.
Heterogeneous UAVs group patrol model in Complex mountain environment
Problem formulation
There is a police UAV base in a border area, which is equipped with several UAVs of different batches and types, and the area contains a large number of mountains, rivers and other complex terrain environments. The patrolling mode of the heterogeneous UAVs is as follows: the points to be patrolled by each UAV are planned before the UAVs takes off, and then the UAVs takes off to patrol each patrol point in turn according to the planned patrol points, until the patrol of the planned patrol points is completed and then returns to the UAV base.
Model assumptions
To better describe how heterogeneous UAVs perform border patrol tasks, this paper made the following assumptions:
Good flying conditions for the UAVs in the patrol area being flown, with no adverse weather conditions such as high winds, precipitation, fog or lightning. UAVs are considered to fly at constant speeds on each discrete track segment during patrol task without complex movements, such as drone roll, etc. This article ignores the energy loss caused by drone pitching and yawing. The UAV's surroundings’ air density and drag coefficient remain constant during the patrol task. the locations of the points to be patrolled by the UAV on patrol are known and can be defined according to the patrol task requirements.
Establishment of mathematical models
Construction of border patrol environment model
When drones perform border patrol missions, they are threatened by wind shear, military restricted areas, and magnetic fields. When drones enter such areas, they will be shot down or bombed. Therefore, this article is based on the real environment of a mountainous border area, Comprehensive consideration of threats such as wind shear, through the use of mountain environment functions to complete the establishment of the mountain environment and other threatened areas:


Topographical map of the mountain patrol area.

Environmental fitting model.
Construction of mathematical model for UAV border patrol
From the literature
23
through the force test analysis of multi-rotor UAV in 3-dimensional space, it can be seen that when the UAV motor output voltage is constant, the power load of the quadrotor UAV can be approximated as a constant through multiple test experimental sampling analysis, and the power load expression is:

The relationship between the combined force on the UAV and the power consumed by the UAV can therefore be deduced to be proportional:


When UAV A is flying, the air resistance

The process of the UAV's patrol task on any path segment

In the same way, the force exerted by the UAV during the patrol mission can also be decomposed into the z axis direction and the horizontal



Since the total lift of the UAV is proportional to the total power of the drone, the total energy consumption during the flight of the heterogeneous UAVs group can be derived:



In summary, the final optimization goal can be obtained as:

Constraints
Maximum energy constraint for UAV:

Maximum climb speed of the UAV:

Maximum descent speed of the UAV:

Return of UAV to UAV base:

The UAV patrols each patrol point once:

Algorithm description
Shuffled frog leaping algorithm
The shuffled frog leading algorithm is a bionic swarm intelligence algorithm proposed in 2000 to solve large-scale continuous optimization problems. In the shuffled frog leading algorithm, the position of each frog represents a feasible solution to the problem. There are small islands in the water area where the frog is located. In the initialization phase of the algorithm, each frog is assigned to on each island, as shown in Figure 3.

Sketch Map of the population division.
In the update phase of the algorithm, the frog with the worst fitness value on each island will move to the frog with the best fitness value on the island. If the new location has better fitness than the original location, the frog will accept it. This position, otherwise, will approach the optimal global frog. If the new position has better fitness than the original position, the frog will accept this position; otherwise, the frog will move randomly in space.
The basic steps of the shuffled frog leading algorithm are as follows:
Step 1. Initialize the parameters and randomly generate the initial population in the solution space. Step 2. Parameter setting Step 3. Calculate the fitness function value of the individuals in the population, arrange them in ascending order, and assign them to N islands. Step 4. Update the location Step 5. Determine if n is equal to N. If so, proceed to Step 4, otherwise, return to Step 3. Step 6. Determine whether the maximum number of iterations, is the exit, otherwise Step 2.
Where,
Although the shuffled frog leading algorithm is less complex and requires less time to solve the problem, the optimization effect of the algorithm is greatly affected by the initialization. Whether the algorithm can be further optimized depends entirely on the ability of the worst-adapted frog on each island. It is impossible to find a better position than the current position of the frog with the best fitness, so the hybrid leap frog algorithm is not suitable for large-scale applications. On this basis, the differential crossover strategy is introduced for algorithm mixing to solve the problem that the shuffled frog leading algorithm quickly falls into stagnation,the adaptive step factor is introduced to further improve the hybrid algorithm.



improved hybrid differential based on adaptive step size factor shuffled frog leaping algorithm
Difference crossover strategy
In the traditional SFLA algorithm, the algorithm optimization mainly relies on the location update of the worst-adapted frogs on each island, the ability of these frogs to develop the solution space is one of the essential conditions for determining whether the algorithm can find the optimal solution, when the frog is looking for a new position, it does not find a better position than the position of the current optimal frog, so the algorithm will not be optimized, resulting in stagnation. Therefore, in order to ensure that all frogs can participate in the position update, the introduction Differential crossover strategy.
First, the mutant population is generated through the linear combination of different individuals. The generation of the mutant individuals is as follows:

After the generation of the variant population, the variant population will be sorted instead of the original population and assigned to each island, updated in position according to equation (20) (21) (22) and crossed with the original population after the variant population has been updated.

The crossover population is then combined with the original population, fitness values are calculated and the better-adapted individuals are kept, the number of individuals retained should not exceed
Adaptive step factor
In the traditional SFLA algorithm, a random number is used for the step length of the following search; that is, the following search only guarantees the search direction of the individual, and the search step has certain randomness, which may cause the algorithm to converge slowly, so the adaptive step is introduced. The length factor, the step length factor, will be adjusted according to the distance between the two individuals to control the distance that the individual moves. After adopting the adaptive step length factor, the formula (20) (21) becomes:



Adaptive step factor.
Solution of the model
Data and experimental environment
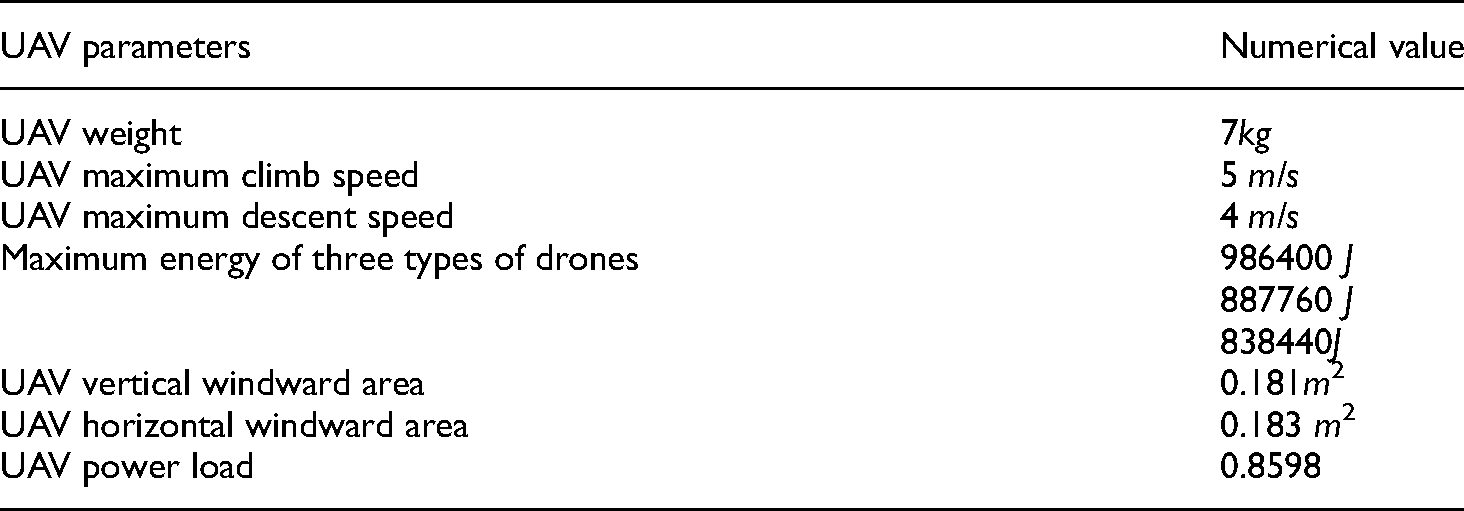
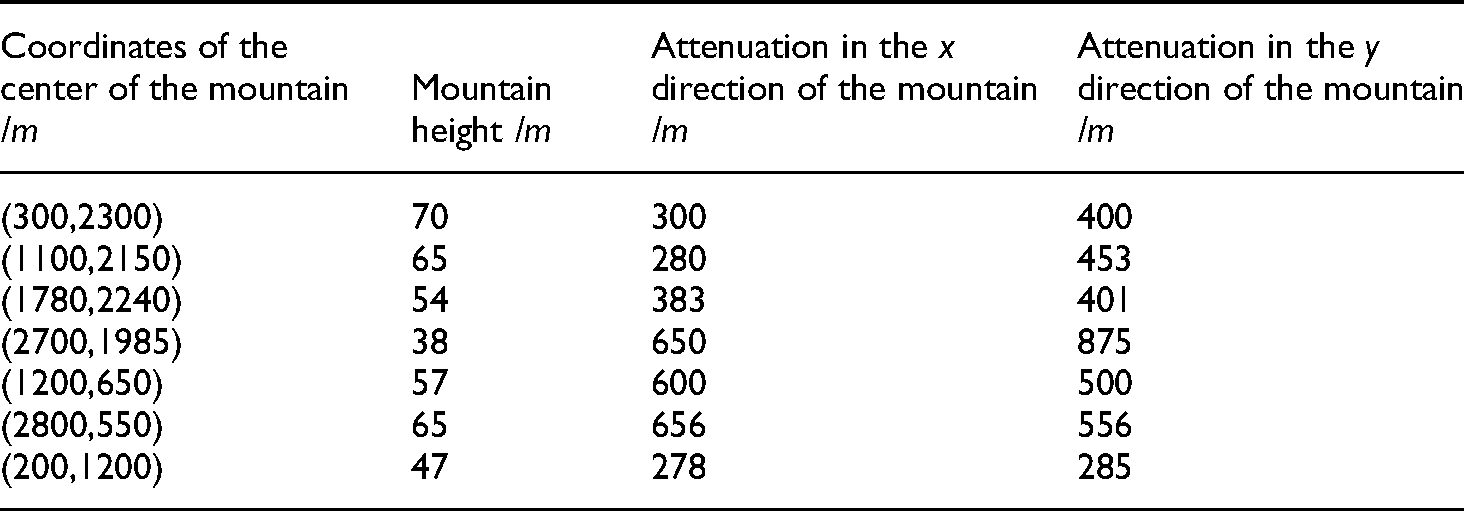
In the calculation experiment of this paper, we take the environmental data of a plateau mountainous area in southwestern China as the simulation background. In the simulation experiment designed in this paper, there are five available UAVs (which can be divided into three types), and a total of 30 points need to be inspected. The experimental background is a mountainous environment with 3000 m * 3000 m of seven threat areas. In this experiment, the planning of UAV patrol tasks and the track planning of each UAV are mainly studied in a certain period according to the requirements of patrol tasks. The UAV parameters are shown in Table 1 and the mountain threat area parameters are shown in Table 2.
UAVs parameter setting.
Parameter setting of mountain peak model.
In this paper, the experimental environment for the model and algorithm is Interi7 - 9750H CPU (2.60 GHz) with memory of 16 Gb, and the simulation software is Matlab2017b. At the same time, the improved shuffled frog leaping algorithm designed in this paper is simulated and compared with the traditional particle swarm algorithm, differential evolution algorithm and shuffled frog leaping algorithm.
Analysis of simulation results
Table 3 shows the comparison of the solution results of the proposed algorithm and SFLA, DE, PSO algorithms for the established mathematical model of heterogeneous UAVs border patrol. Figures 5, 6, 7 6, 7 and 8 show the simulation diagram of the four algorithms for solving the model. Figures 9, 10, 11 and 12 show the comparison diagram of the improved shuffled frog leaping algorithm designed in this paper with the other three preamble algorithms in four aspects of patrol task planning, patrol revenue, patrol track planning and patrol energy consumption.

Schematic of ISFLA algorithm optimization.

Schematic of SFLA algorithm optimization.

Schematic of DE algorithm optimization.

Schematic of PSO algorithm optimization.

Comparison chart of UAVs patrol energy consumption algorithm.
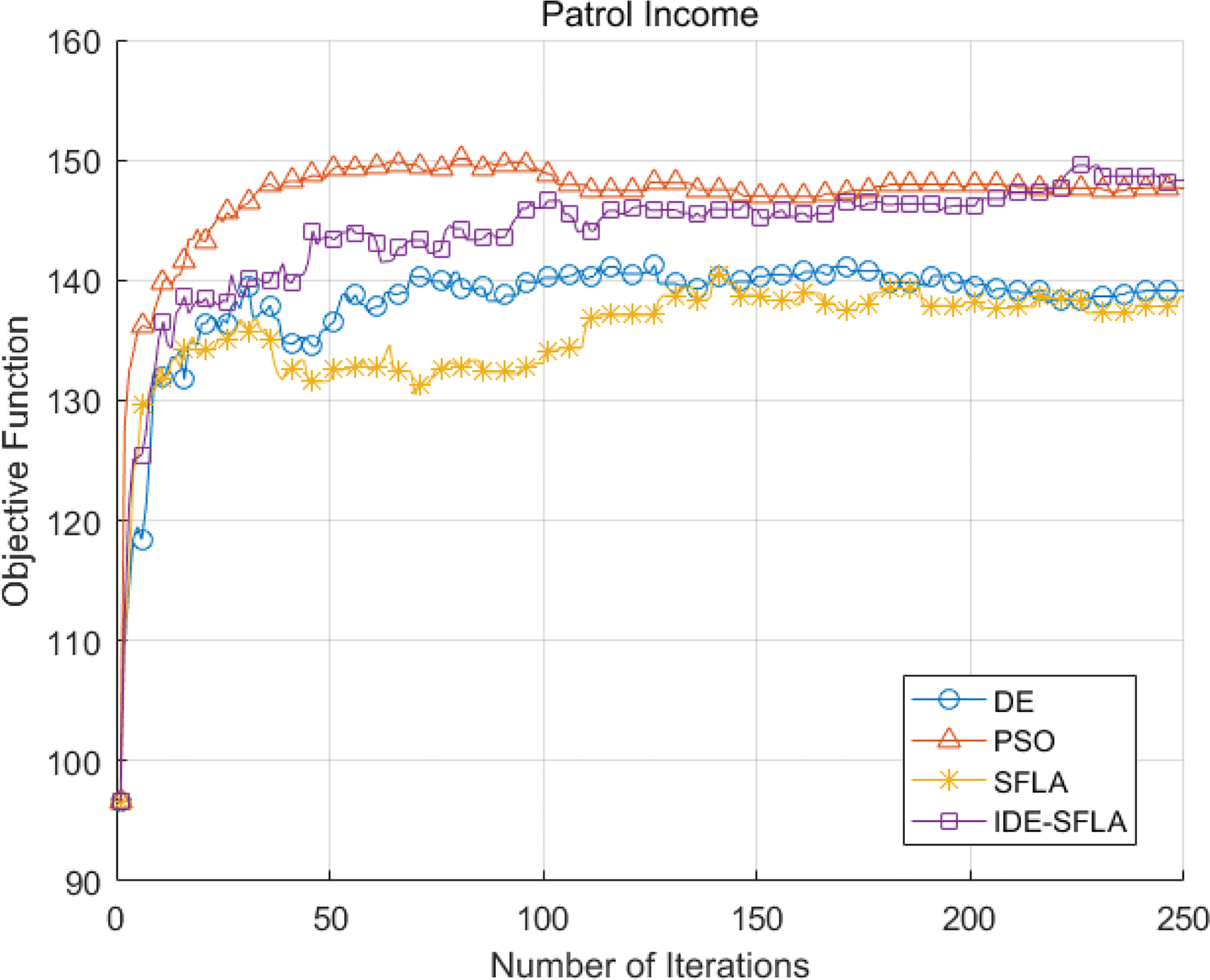
Comparison chart of UAVs patrol revenue algorithm.

Comparison chart of UAVs track planning algorithms.

Comparison chart of UAVs patrol optimization target algorithm.
Comparison of solution results of each algorithm.

Result analysis
The simulation test results show that the ISLFA algorithm proposed in this paper has a more significant improvement in solution accuracy and efficiency than the particle swarm algorithm, differential evolution algorithm, and hybrid frog-jumping algorithm. As shown in Figure 9, the optimization results of the ISLFA, SLFA, PSO, and DE algorithms for the objective function are 242.2, 314.4, 262.9, and 276.7, respectively. The solution accuracy of the ISLFA algorithm is 33.6%, 8.5%, and 12.4% higher than that of the SFLA, PSO, and DE algorithms, respectively. The patrol paths and patrol energy consumption are shown in Figure 5 and Table 3. The patrol gain is 6.99%, 6.75%, and 0.47% higher than the SFLA, PSO, and DE algorithms, respectively.
Conclusion
Compared with the single-type UAVs, the heterogeneous UAVs has better environmental adaptability and is more in line with the actual needs in the process of patrolling. Therefore, the use of heterogeneous UAVs to perform the border patrol task can effectively compensate for the problems existing in the single-type UAVs. In order to optimize the patrol coverage rate and energy consumption of heterogeneous UAVs groups in the implementation of border patrol tasks, this paper establishes a planning model for the border patrol of heterogeneous UAVs groups in complex mountainous environment based on the constraints in complex mountainous environment and the physical properties and kinematic laws of UAVs, and designs an improved shuffled frog leaping algorithm for solving the established UAVs planning model. Finally, the feasibility and effectiveness of the improved shuffled frog leaping algorithm proposed in this paper are effectively illustrated by the horizontal comparison between the simulation experiment and PSO, DE and SFLA algorithms. In the future research, we will focus on the environmental characteristics of plateau mountainous areas to carry out heterogeneous UAVs patrol planning research.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) declared receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Infrastructure Construction Project of Yunnan Power Grid Co., Ltd. under Grants 050000WS24140005, and in part by the Yunnan Provincial Science and Technology Project under Grants 202104AP080061.