
Abstract
In this article, aiming at the longitudinal dynamics model of air-breathing hypersonic vehicles, a fuzzy-approximation-based prescribed performance control scheme with input constraints is proposed. First, this article presents a novel prescribed performance function, which does not depend on the sign of initial tracking error. And combining prescribed performance control method with backstepping control, the control scheme can ensure that system can converge at a prescribed rate of convergence, overshoot, and steady-state error. In order to solve the problem that backstepping control method needs to be differentiated multiple times, fuzzy approximators are used to estimate the unknown functions, and norm estimation approach is used to simplify the computation of fuzzy approximator. Aiming at the problem of input saturation of actuator in subsystem of air-breathing hypersonic vehicle, the new auxiliary system is designed to ensure the stability and robustness of air-breathing hypersonic vehicle system under input constraints. Finally, the effectiveness of the proposed control strategy is verified by simulation analysis.
Keywords
Introduction
Air-breathing hypersonic vehicle (AHV) is a new type of aerospace vehicle that can fly for a long distance at five times the speed of sound in large airspace, flying at an altitude of 20–100 km in near space.1,2 AHV combines many advanced technologies of modern science and technology, and it has the advantages of spacecraft and aircraft. It is an important direction of future aircraft development. It has great development prospects in military and civil fields. In the military field, it is a new type of global strike weapon. 3 In the civil field, if we develop reusable space vehicles, we can greatly reduce the cost of space travel, which is of great practical significance.4,5
Compared with conventional aircraft, AHV is designed by integration of airframe and engine, and its waverider structure has special aerodynamic characteristics.6,7 During hypersonic flight, there will be strong coupling effect among propulsion system, body, and structure dynamics of aircraft. 8 In addition, the aerodynamic and thermal characteristics of the aircraft also change dramatically, and the flight environment is complex, leading to the hypersonic vehicles with strong coupling, fast time variation, and nonlinear and uncertain characteristics.9–11 In practical application, in order to ensure the stable flight of hypersonic vehicles, the saturation of actuators of AHV should also be considered.
At present, many control theories have emerged in the field of AHV control system, such as robust control,12,13 sliding mode control,14,15 backstepping control,16,17 and intelligent control.18–20 Wei et al. 21 proposed a μ synthesis analysis method and designed a robust control law. The control law can keep the system stable in the presence of unknown disturbances and unmodeled dynamics, but it will lose other control performance. Guo et al. 22 proposed an H∞ control method based on online Simultaneous Policy Update Algorithm (SPUA), which converts H∞ state feedback control problem into solving Hamilton–Jacobi–Isaacs (HJI) equation. This method has good tracking effect, but the solution of the equation is still complex. Xu et al. 23 designed an adaptive sliding mode control law to ensure that the velocity tracking error and altitude tracking error converge to the sliding mode surface and to ensure the control accuracy when the model parameters are perturbed. However, the high-frequency chattering of the control input limits the reliability of the control law. Wu et al. 24 and Wang et al. 25 use sliding mode observer to effectively weaken the high-frequency chattering of control input. Wang et al. 26 and Tian et al. 27 studied the chattering phenomenon in sliding mode control. By designing sliding mode observer or putting forward a new switching strategy of high-order sliding mode control, the accurate switching of sliding mode control can be achieved, but the stability of the control system will be slightly reduced. Sun et al. 28 and Bu et al. 29 introduce disturbance observer in every step of the design process of the backstepping scheme, which guarantees the robustness of the backstepping control law. However, the backstepping control requires high-precision model, and the repeated derivation of the virtual control law increases the computational complexity. Ji et al. 30 design a backstepping control law based on instruction filter, which uses instruction filter to filter the virtual control law and avoids complex derivative calculation. In recent years, intelligent control has developed rapidly. Gao et al. 31 use fuzzy system to approximate the unknown functions of each subsystem of AHV model online, which requires high computing power of the system.
In 2008, the Greek scholar Bechlioulis and Rovithakis32,33 proposed a new prescribed performance control strategy, which can simultaneously realize the constraint on the transient performance and steady-state performance of the system. Prescribed performance control transforms a tracking problem with performance constraints on output errors into an unconstrained stabilization problem by introducing performance functions. By constructing error conversion functions, the performance indicators of the system are constrained. Many fields have begun to study the prescribed performance control,34–36 but the existing prescribed performance control rarely takes into account the problem of input constraints. In practical application, with the increase of AHV velocity, the efficiency of the elevator and other actuators will decrease significantly. 37 Therefore, it is significant to develop the prescribed performance control with input constraints.
In this article, a new fuzzy-approximation-based prescribed performance control scheme with input constraints is proposed. First, the AHV control system is decomposed into velocity subsystem and altitude subsystem. Then, the control law is designed for each subsystem by using the newly designed prescribed performance function and backstepping control method. Each subsystem only needs one actual control law to be executed. Finally, the superior performance of the new control scheme proposed in this article is verified by simulation. The special contributions of this study include the following:
This article proposes a novel prescribed performance function. This function does not depend on the sign of initial tracking error, so it is more practical than the traditional prescribed performance function.
The prescribed performance function proposed in this article is combined with backstepping control method, which is more advantageous than backstepping control method.
In the controller, using the idea of norm estimation 38 reduces the computational complexity of the fuzzy approximator, so that each fuzzy approximator contains only one adaptive parameter and improves the operation speed of control system.
In this study, a new auxiliary system to handle actuator saturation problems is introduced.
Preliminaries
Prescribed performance
Lemma 1
If a smoothing function
The traditional prescribed performance function 34 takes the form of

where
According to the requirements of the prescribed performance, tracking error should meet the following relations

where
In order to eliminate the limitation that the initial error signs must be known, based on Lemma 1, we construct a new prescribed performance function

Taking time derivative of

where
Obviously,

Therefore, the new function satisfies the definition of Lemma 1.
Let tracking error

where

Therefore, when the prescribed performance function takes the form of equation (3), the initial error sign does not need to be known, thus simplifying the subsequent controller design process.
The performance limitations for tracking errors are shown in Figure 1. As can be seen from Figure 1,

Graphical presentation of the prescribed performance.
By selecting appropriate parameters
Because it is difficult to construct the controller directly according to equation (6), an error conversion function is introduced to facilitate the subsequent design. The form of the function is shown as follows

where

Since

where

According to equation (9),
Thus, we can see that

Because

According to equation (8), equation (12) is equivalent to equation (6). According to the conclusion of Bechlioulis and Rovithakis,
32
if the boundedness of
Fuzzy function approximator
Wang 39 proved that the fuzzy logic system with single-point fuzzification, product inference, and central average degelatinization is an universal approximator.
Assuming that the input space of a fuzzy logic system is
The output of the system can be expressed as

In equation (13), the input vector is

In equation (14),a
Lemma 2
For a given real continuous function

where
AHV model
In the current research results, most of the work on AHV control system is carried out in the longitudinal direction. Because AHV is extremely sensitive to altitude, in order to reduce fuel consumption, lateral maneuver should be avoided during flight. The Parker et al.’s 10 model proposed by the US Air Force Laboratory, which ignores some weak coupling factors and slow dynamic terms of AHV system, is used as the dynamic model in this article






For rigid body states of AHV,
The specific magnitudes of lift

The control input of AHV system is fuel-equivalent ratio
Controller design
The control objective of AHV is to realize robust tracking of reference values
Design of velocity controller
Equation (16) in the velocity subsystem is transformed into the following form

where
Tracking error of velocity is defined as

Combining the contents of equation (21) and taking derivative of equation (22)

Since function

In equation (24),

where
In order to reduce the computational burden, based on the idea of norm estimation approach, we define
According to equation (10), the conversion error

In equation (26),
Combining equation (23), the following equation can be obtained by calculating the time derivative of equation (26)

Based on backstepping control theory,

where

where
Since the actual input of

where

where

where
Tracking error in equation (22) is rewritten as

Derivation of equation (33)

Then, conversion error


where
Substitute equation (34) into equation (35) and we get

The ideal control law is redesigned as

where
Next, we will analyze the stability of velocity controller with input constraints theoretically.
Theorem 1
Consider the closed-loop system for velocity subsystem of AHV consisting of control law (37), adaptive law (29), and auxiliary compensation system (32). Then, all the signals involved are semi-globally uniformly ultimately bounded.
The proof of Theorem 1 is listed in Appendix 1.
Remark 1
Compared with the method in Gao et al., 31 in the process of controlling each subsystem of AHV, each weight update requires a large amount of calculation. This article adopts the design of norm estimation approach, and only one online learning parameter is required, which significantly reduces the online calculation amount.
Design of altitude controller
To simplify the controller design, the altitude subsystem is rewritten as

Step 1: define the tracking error of altitude as

The derivative of time for equation (39) can be obtained

According to equation (10), the conversion error of altitude is defined as

In equation (41),
The derivative of equation (41) can be obtained

Select virtual control

where
In order to avoid the expansion problem caused by calculation of the first derivative in the virtual control law, the tracking differentiator with high stability and rapidity (HSSTD) proposed by Yao and Cao40 is introduced to estimate the first derivative of

where
Step 2: define track angle tracking error as

The derivation of equation (45) can be obtained

Based on the proposed fuzzy approximator, the estimation of

Define the ideal weight coefficient parameter vector as

where
To reduce the computational burden, define

Select virtual control

where

where
Similarly, HSSTD is introduced to estimate the first derivative of

where
Step 3: define the pitch angle tracking error as

The derivative of time for equation (53) can be obtained

Select virtual control

where
Get the value of virtual control

where
Step 4: the tracking error of pitch angular rate is defined as

The derivative of time for equation (57) can be obtained

Similarly, the fuzzy approximator is used to estimate the unknown nonlinear function

Defining the ideal weight coefficient parameter vector as

where
Define

If the estimation of

where
The adaptive law of

where
Next, we redesign the control law in the constrained case.
The constrained elevator deflection is described as

where
In order to eliminate the influence of input constraints on control performance, a new auxiliary system is introduced to eliminate the deviation between the ideal control law and the control law caused by input constraints

where
The modified tracking error is defined as

The derivative of equation (66) can be obtained

Select the modified control law

where
Theorem 2
Consider the closed-loop system for altitude subsystem of AHV consisting of control laws (43), (50), (55), and (68); adaptive laws (51) and (63); and auxiliary compensation system (65). Then, all the signals involved are semi-globally uniformly ultimately bounded.
The proof of Theorem 2 is listed in Appendix 1.
Remark 2
Similar to the dynamic performance presupposition of
Therefore, the whole control system and the structure of the AHV model are shown in Figure 2.
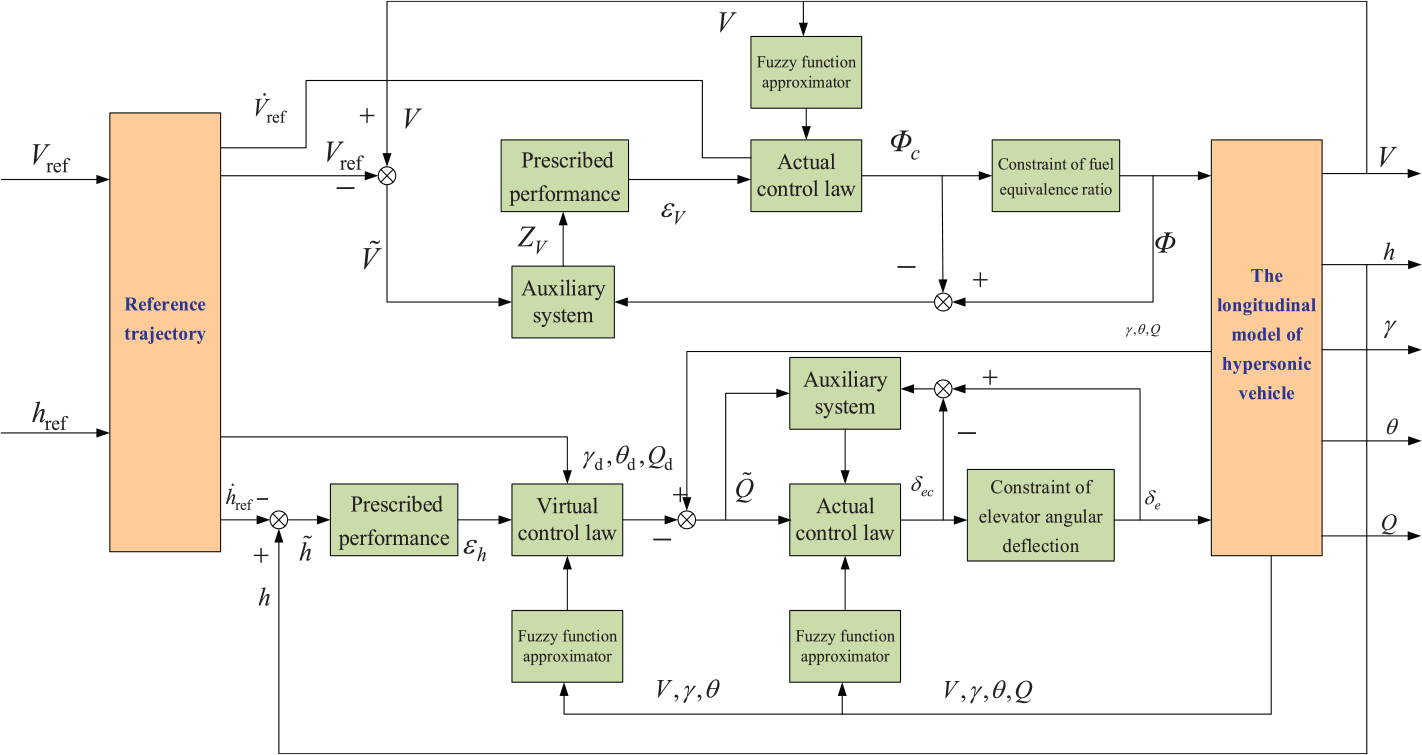
Control structure of AHV model.
Simulation results
Based on the control system and AHV model shown in Figure 2, the tracking simulation of velocity and altitude reference instructions is carried out to verify the effectiveness of the control algorithm. The fourth-order Runge–Kutta method is used in the simulation experiment, and the step size is 0.01 s.
The parameters of the controller are
The input variables of three fuzzy approximators are selected as
Gauss basis function is chosen as membership function

The prescribed performance functions are taken into the following forms

The initial states of AHV are shown in Table 1. In the cruise state, the following two commands are mainly followed.
Initial trim conditions.

Case 1. Verify the effectiveness of the prescribed performance control method
The selected velocity reference command is a step signal, which produces a step signal of

Velocity tracking and tracking error.

Altitude tracking and tracking error.

Control inputs.

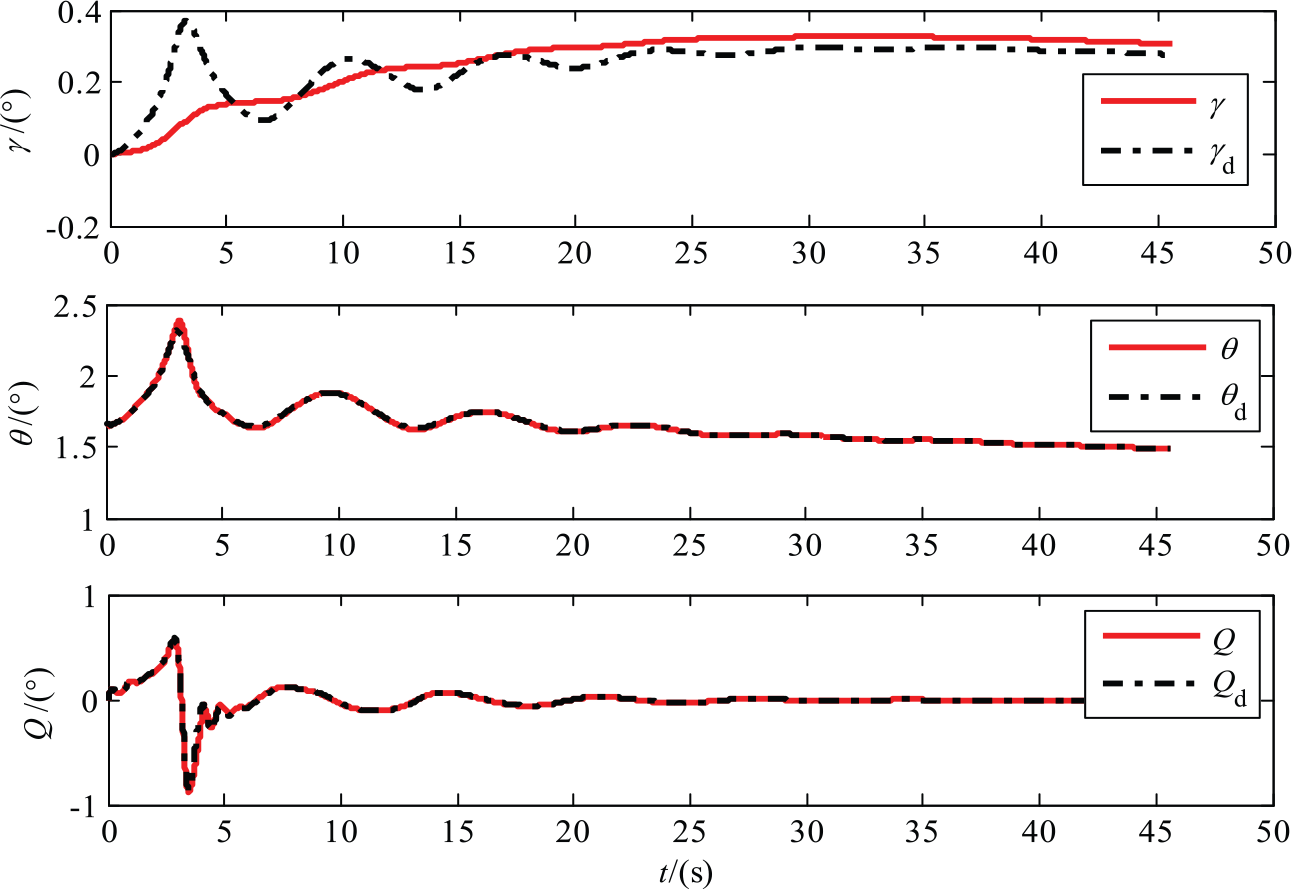
Track angle and tracking error.

Pitch angle and tracking error.

Pitch rate and tracking error.
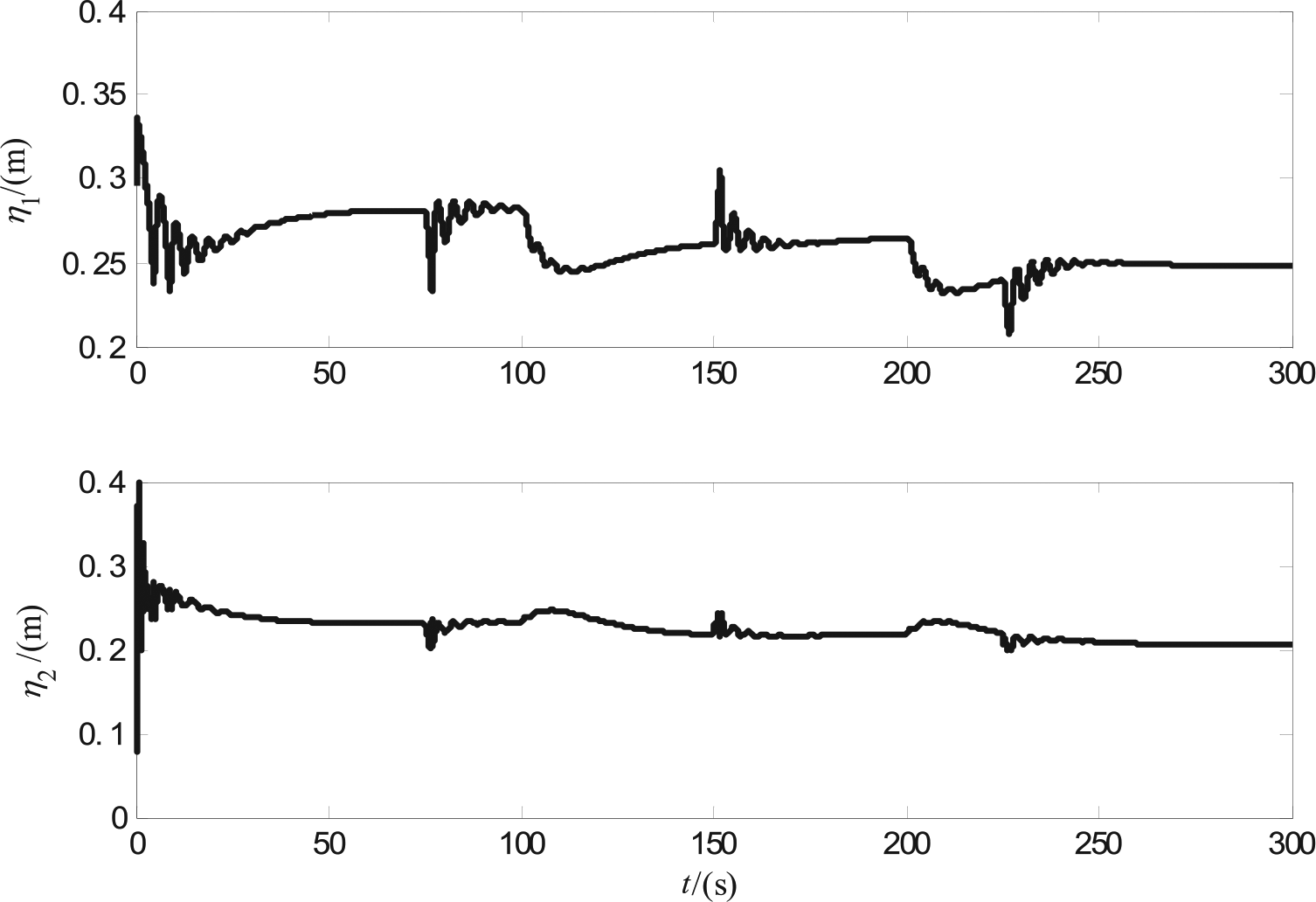
Flexible states.
From Figure 3, it can be seen that the velocity tracking error of “1” can converge rapidly to 0, the overshoot is only
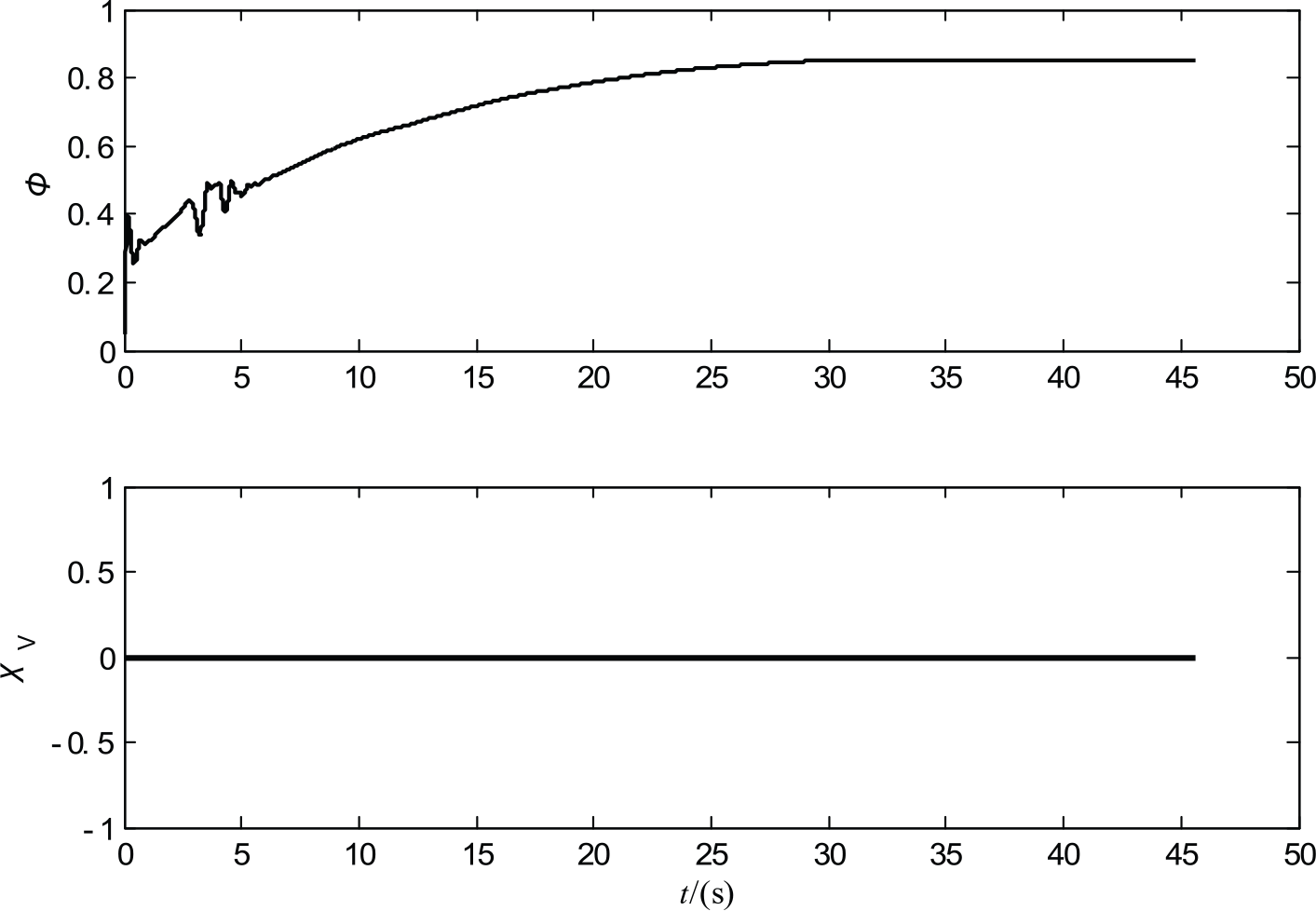
Figure 5 shows the change curves of control input. It can be seen that the control curves are smooth as a whole, but the fuel equivalence ratio and the elevator deflection angle have many peaks. By comparing the variation curves of altitude tracking errors in Figures 4 and 5, it can be seen that the altitude tracking errors are limited by the prescribed boundary at every peak. Figures 6–9 are the curves of rigid body state and flexible state. It can be seen that both rigid body state and flexible body state are within the allowable range, and the flexible vibration suppression effect is better.
Case 2: Verify the effectiveness of the prescribed performance control method with input constraints
Select the step signal with the velocity reference command step of

Fuel equivalent ratio with addition of auxiliary system.
Elevator deflection angle with addition of auxiliary system.

Velocity tracking and tracking error with addition of auxiliary system.

Altitude tracking and tracking error with addition of auxiliary system.
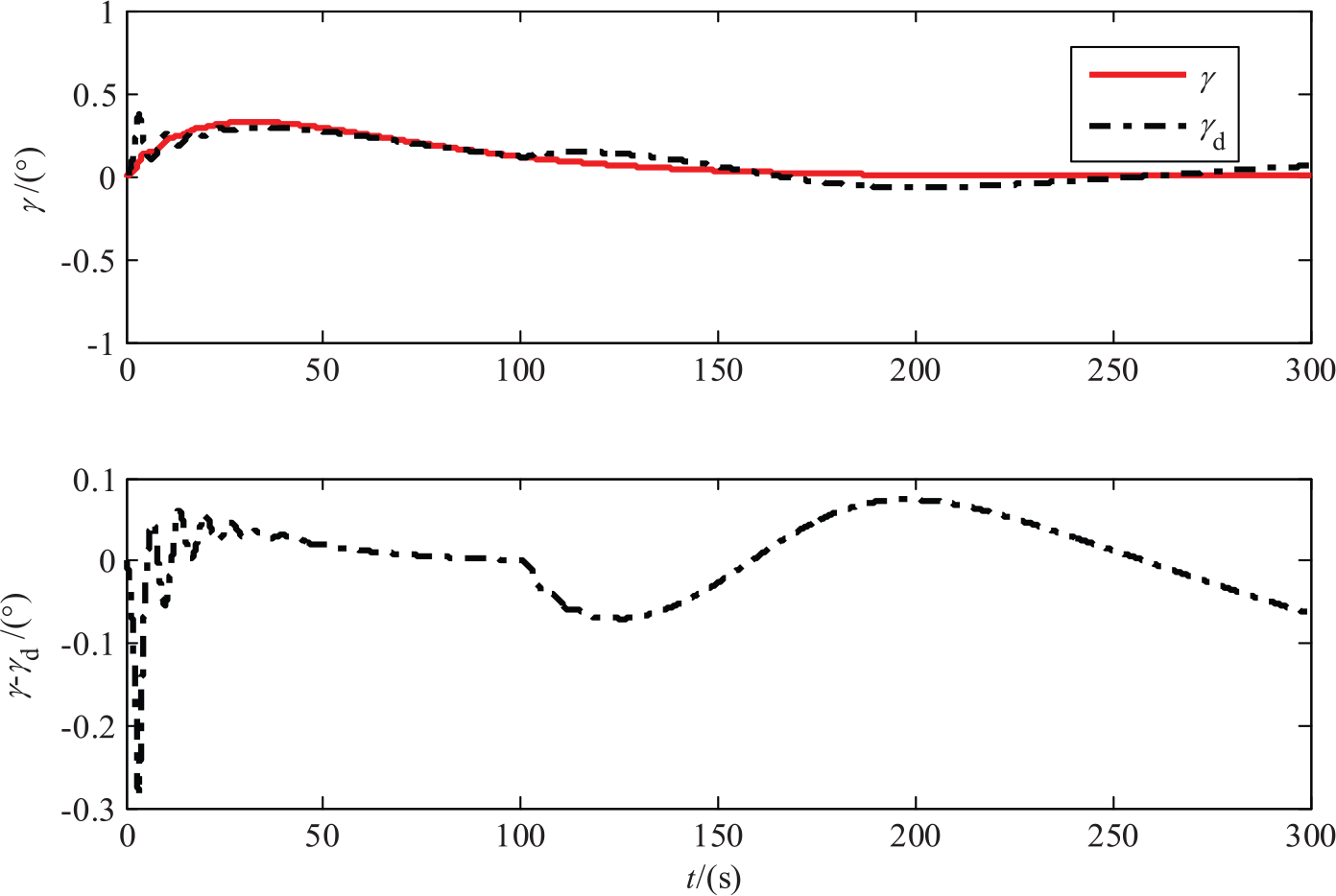
Track angle and tracking error with addition of auxiliary system.

Pitch angle and tracking error with addition of auxiliary system.

Pitch rate and tracking error with addition of auxiliary system.

Flexible states with addition of auxiliary system.

Velocity tracking and tracking error without addition of auxiliary system.

Altitude tracking and tracking error without addition of auxiliary system.
Fuel equivalent ratio without addition of auxiliary system.

Elevator deflection angle without addition of auxiliary system.
Track angle, pitch angle, and pitch rate without addition of auxiliary system.

Flexible states without addition of auxiliary system.
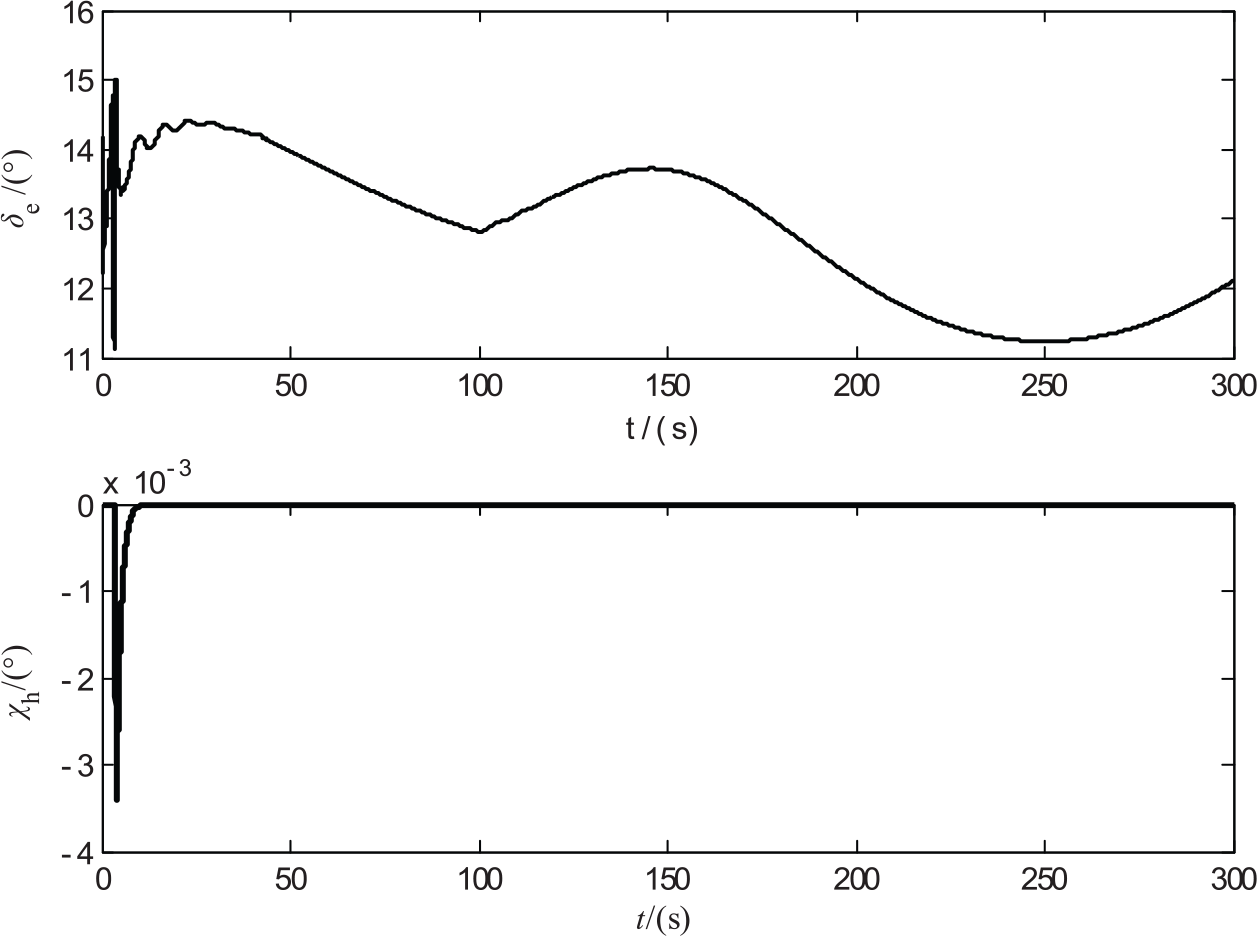
Figures 10 and 11 show the variation curves of control input and auxiliary system. It can be seen that the fuel equivalent ratio and elevator deflection angle are limited, especially the fuel equivalent ratio is severely limited, and the saturation state lasts for nearly 20 s. From the change in the auxiliary system, it can be seen that when the control input is constrained, the compensation system can respond quickly and make the control input out of saturation state. The continuous perturbation of aerodynamic parameters occurs after 100 s, it can be seen that the control input can follow the change of parameters and respond in time to ensure the stable tracking of the control system. Figures 12 and 13 are the variation curves of velocity and altitude tracking errors. It can be seen that due to the seriously constrained fuel equivalence ratio, the velocity tracking errors have large deviations, but still can ensure that the tracking errors are within the prescribed boundaries and meet the prescribed performance requirements. In addition, due to the persistent perturbation of aerodynamic parameters after 100 s, the altitude tracking error fluctuates to some extent, but it can always be within the prescribed boundary to meet the performance requirements. Figures 14–17 show the variation curves of rigid body state and flexible state. It can be seen that when the aerodynamic parameters are perturbed, the tracking errors of each attitude angle are kept near 0, which ensures good tracking effect. With the perturbation of aerodynamic parameters, each state variable can respond quickly and be within its allowable range.
Figures 18–23 are the response curves without the auxiliary system. It can be seen that the constant saturation of fuel equivalence ratio leads to the continuous increase in velocity tracking error, but the steady-state value of velocity tracking error caused by the limitation of prescribed boundary can only be changed in a very small range of
In addition, it can be seen from Figure 21 that when there is no compensation, the elevator deflection angle can also exit from the transient saturation state, but the application of the constrained compensation strategy proposed in this article can make the control input exit from the saturation state faster and reduce the chattering phenomenon, reduce the impact of the control input constraints on trajectory tracking, and improve the performance of the control system.
Conclusion
A new prescribed performance controller based on fuzzy function approximator with input constraints is proposed in this article. By constructing a new prescribed performance function, the tracking error can satisfy both the prescribed transient performance and the steady-state performance. By introducing norm estimation approach into the fuzzy approximator, each fuzzy approximator only needs an adaptive parameter update law to reduce the computational load of the system. Considering input constraints, the influence of actuator constraints on the performance of the control system is analyzed, and the new type of auxiliary system is used to compensate the system. Through simulation verification, the proposed method is verified and has certain advantages. In future research, we will conduct research on fuzzy control, prescribed performance control, and non-affine systems.
Footnotes
Appendix 1
The proof of Theorem 1 is as follows.
The estimation error of
Substitute equation (37) into equation (36) to get
Select Lyapunov function as
Take the derivative of equation (71) and substitute equation (36) into (72)
as
Therefore, equation (72) can be rewritten as
Define the following compact set
Let
The boundedness of the new auxiliary system
Let
Combining equations (34) and (74), the derivative of equation (75) is obtained
Let
The stability of the velocity subsystem is proved.
The proof of Theorem 2 is as follows.
First, the estimation error of the differentiator is defined as
It can be seen from Yao and Cao
40
that the estimation errors
When equations (43), (45), and (77) are substituted into equation (41), there is
Combining equations (46), (48), and (50), we can get
Substituting equations (55), (57), and (77) into equation (54), we can get
According to equations (67), (60), and (68), we have
The estimation error of fuzzy approximator learning variables are defined as
The Lyapunov function is selected as
In the equations
where,
Combining equations (51), (63), and (78)–(82), the derivative of equation (83) can be obtained
as
So, equation (88) can be rewritten as
where
Define the following compact sets, respectively
Let
If
Define the compact set
Choosing large enough
The above proofs are obtained on the premise that the introduced auxiliary system
Let
Combining equations (92) and (65), derivation of equation (95) is obtained
Let
Then,
If the constrained compensation strategy proposed in Xu et al. 41 is used, the form of the auxiliary system of the velocity subsystem and the altitude subsystem is as follows
When the constraint is serious, it will lead to
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Aeronautical Science Foundation of China (Grant No. 20175896023) and the National Natural Science Foundation of China (Grant Nos 61603410 and 61703424).