
Abstract
Machine learning is quickly becoming an invaluable tool for examining large databases to find patterns and predictions based on similar parameters tested in previous studies. A natural application of this subset of artificial intelligence revolves around material data sets where tests are repeated for basic studies (e.g. tension, compression, bending, or shear) and extrapolating the data for tests not yet considered. Dynamic testing and validation with machine learning is examined here, as a significant time and cost is required for understanding larger-sized specimens (cm scale and larger) especially when the samples are composite materials in tension. This is due in part to the challenges involved in ensuring failure at the region of interests for an anisotropic material and minimizing the number of repeated tests. In this study, the data sets were generated artificially via finite element analysis with failure, and a machine learning code applied to infer the shape of the tensile test coupon knowing only the failure and stress field. Then the algorithm was run to generate a library of ideal coupon geometries based on ply angle and area location of failure within the test specimen. The result is a highly efficient prediction algorithm that can create the ideal specimen shape for tensile testing at speeds orders of magnitude faster than comparable finite element codes.
Keywords
Introduction
Computer aided design and Finite Element Analysis (FEA) have progressed significantly over the last several decades, allowing engineers to optimize structures for virtually any loading case. Coupled with advances in the materials themselves – new plastics and composites with specific strengths approaching or even exceeding some of their metallic counterparts, and with advances in manufacturing – additive manufacturing and automated fiber placement allowing an unprecedented level of control during production, and in the aerospace and space vehicle industry, these all have ushered in a new era of weight savings without compromising structural performance.
Of course, without material validation, much of the performance is dependent on the simulation and there are several instances where engineering without validation can and does prove catastrophic. 1 As vehicles of all types are subject to impact loads (bird strikes and hail for aircrafts, space debris for space vehicles, crash and rocks for automobiles), there is a need for dynamic loading tests on coupon specimens. For composite material validation, the often-used, quasi-static examples include ASTM D3039 for tension, D3410 for compression, D7264 for flexure, and D2344 for short beam shear. 2 There are others as well including ASTM D7136 for damage resistance in impact and D3763 for multiaxial impact. As expected, these standards were developed after years of empirical testing and are verified to provide repeatable results for the material system to extract the engineering values such as modulus, ultimate strength, etc.
For dynamic loading on composites in tension, there are few investigations and even fewer results available due in a large part to the challenges and specialized equipment.
3
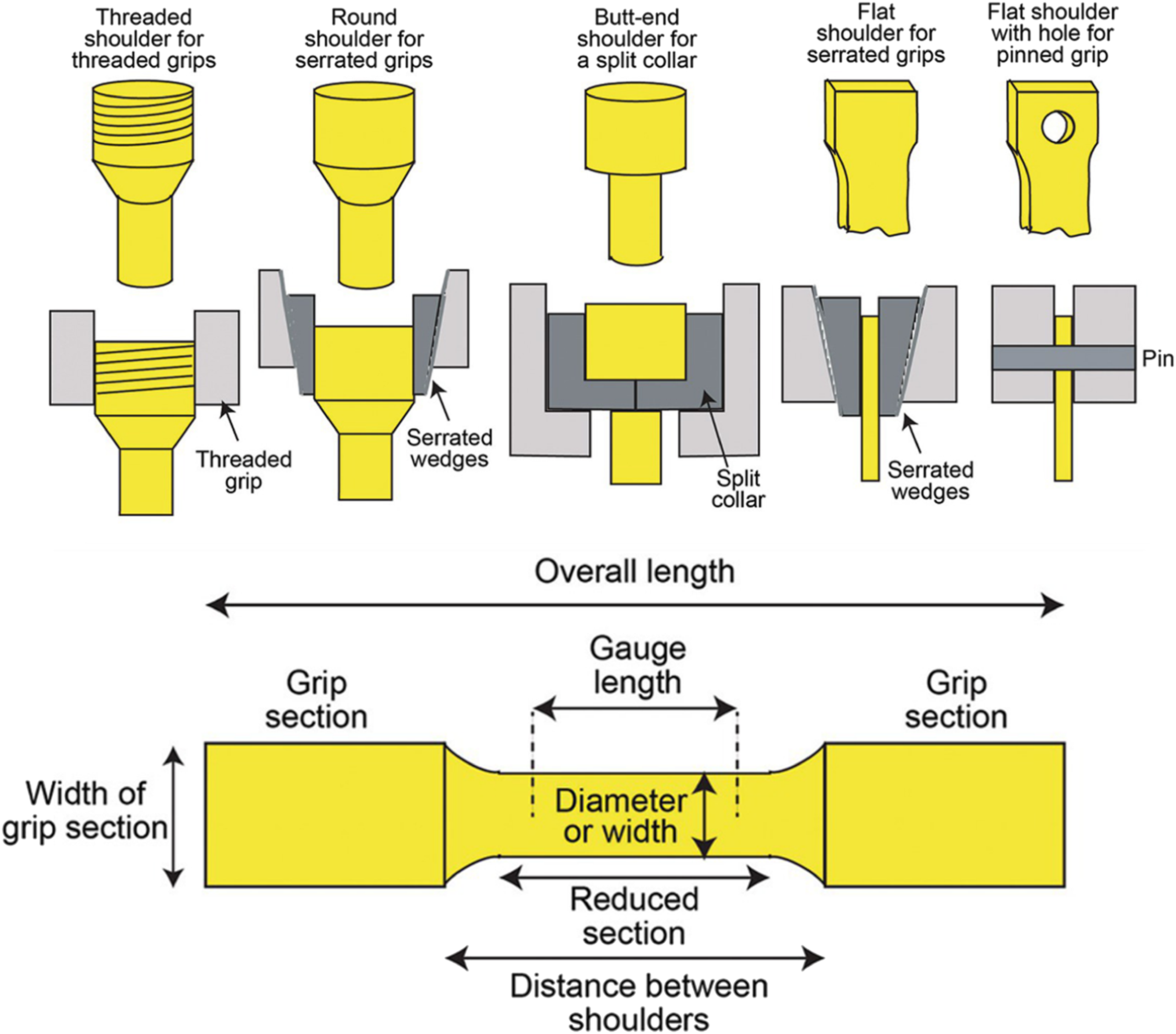
To start, consider all three requirements for a successful test: tensile loading, composite material specimen, and dynamic loading conditions. With the exception of compression testing inducing an unstable deformation mechanism especially for slender specimens (height/radius aspect ratios >>1 that limit applications of confined compression testing due to induced buckling modes), testing under tension is in general more challenging. Under tension, wedges, grips or pinned connections are required to prevent the material from slipping away from the loading mechanism whereas in compression, once induced structural instability is avoided, simply requires two flat parallel surfaces to move towards each other. See Figure 1. Various grip strategies for tension loading and common terminology for specimen in tension loading.
4
Composite materials are not as durable in directions perpendicular to the fiber orientation and, despite having high specific strength parallel to the fibers, they are not readily machined without compromising strength. When tension testing composite coupon specimens, typically flat specimens are used with a necked region and additional layered tabs to reinforce the grip section (Figures 2–3). Drilling holes is also possible in the grips to mechanically pin the specimen to the loading machines although this usually results in failure of the specimen around the hole as opposed to the gage area within the reduced section. For both fastening options, since composites do not have high crushing strength perpendicular to the fiber placement, grip pressure must be balanced to avoid slippage under loading or crushing resulting in premature failure. Unsuccessful composite tension test due to failure outside of the reduced section; reproduced from.
5
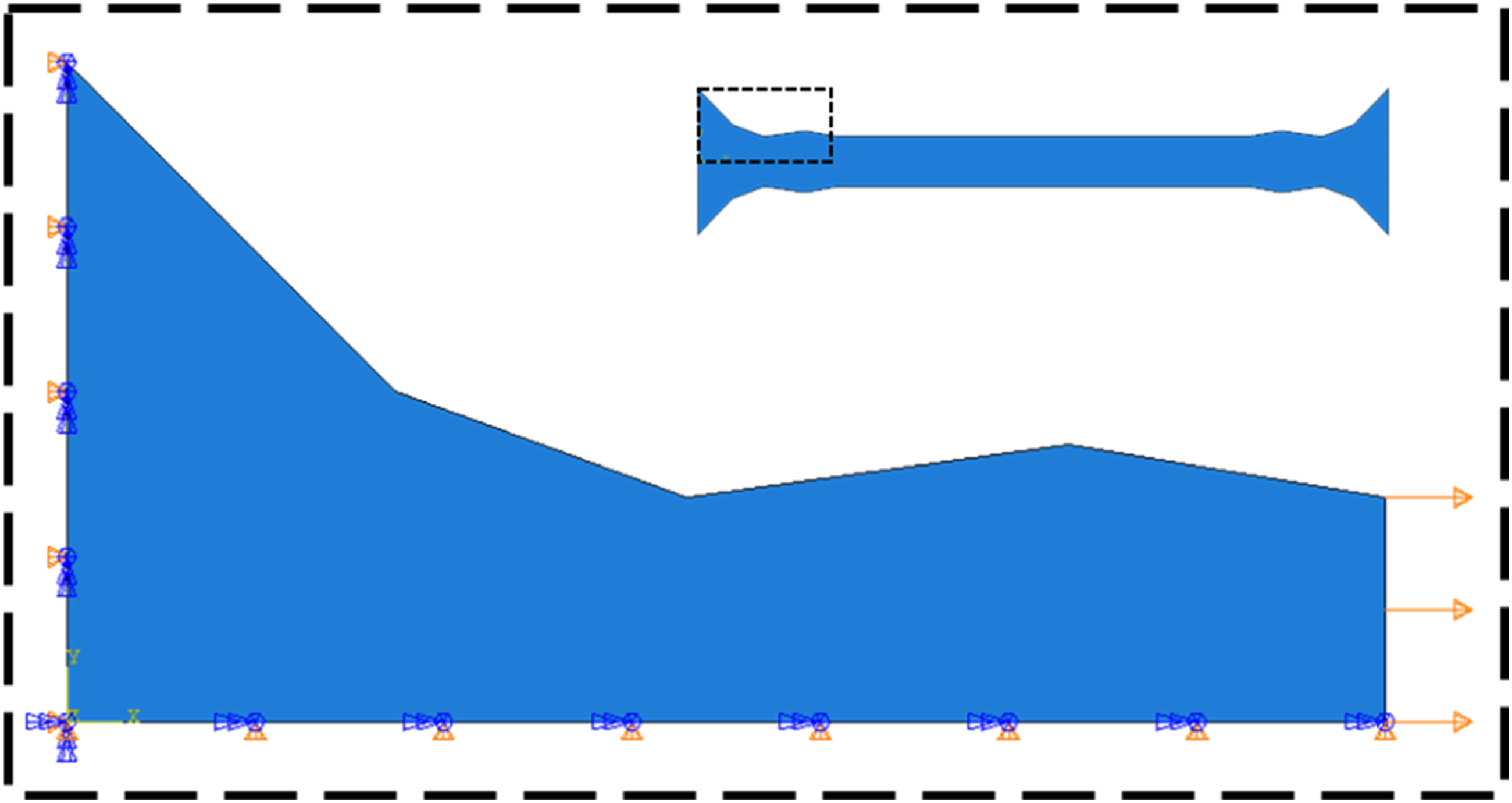
Details of an arbitrary quarter symmetric geometry in the necking-tab region and BC conditions used in ABAQUS as an example of the FEA pre-process for generating the database to input the artificial neural network.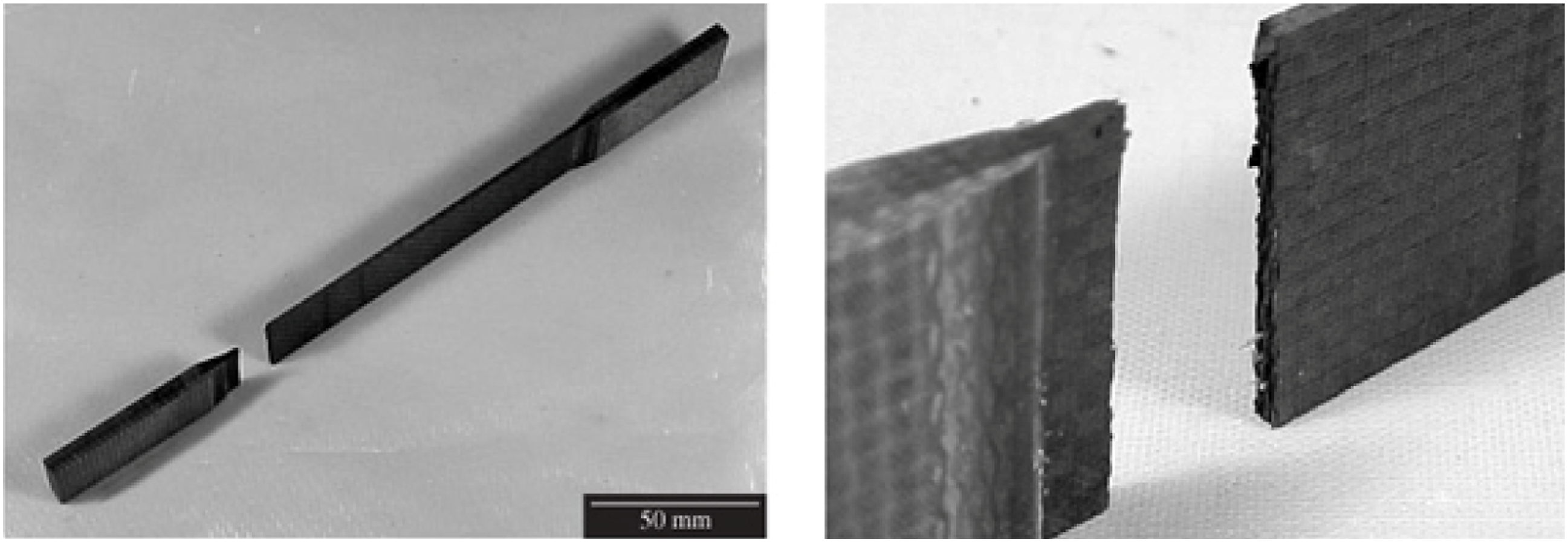
Finally, in dynamic testing, these same issues are magnified since the grips are suddenly pulled apart and the kinematic friction is lower than static friction. Composite specimens are susceptible to failure near the grip section (Figure 3). By comparison, metal specimens are easier to test in tension since there are more ways to grip them including mechanically threading the part into the fixtures (Figure 1).
Provided that the test conditions are achievable (tension, dynamic, composite) the specimen itself must be optimized for minimizing failure outside of the reduced section since homogeneous stress field is preferrable to determine not only the strength but also the material constants. As standards are not present for this, and since the composites have more complex failure mechanisms, a new approach is proposed to facilitate this experimental and numerical process. The purpose of this investigation is to demonstrate Machine Learning (ML) for specimen geometry optimization to minimize stress concentrators in unwanted regions. This will be achieved by predicting the local damage on the boundaries of a composite laminate for a range of fiber orientations and profile geometries under tension.
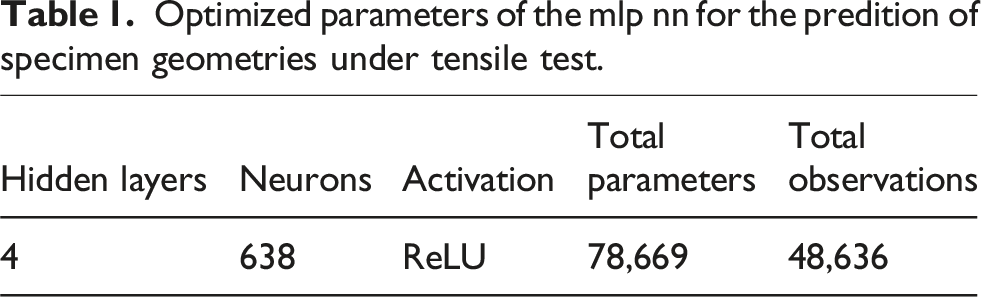
Optimized parameters of the mlp nn for the predition of specimen geometries under tensile test.
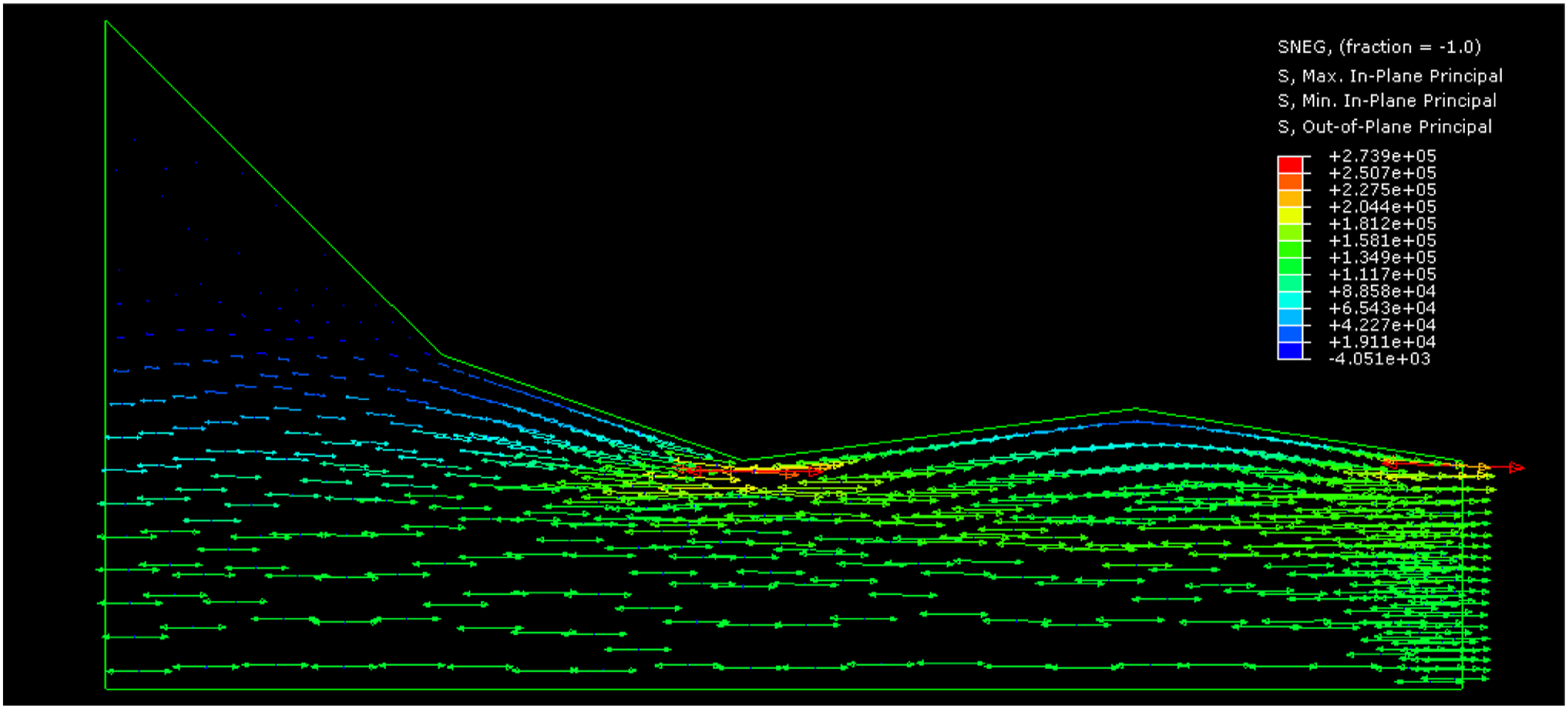
Results from FEA ABAQUS showing the principal stress distribution in the simulated composite lamina in the necking-tab region.
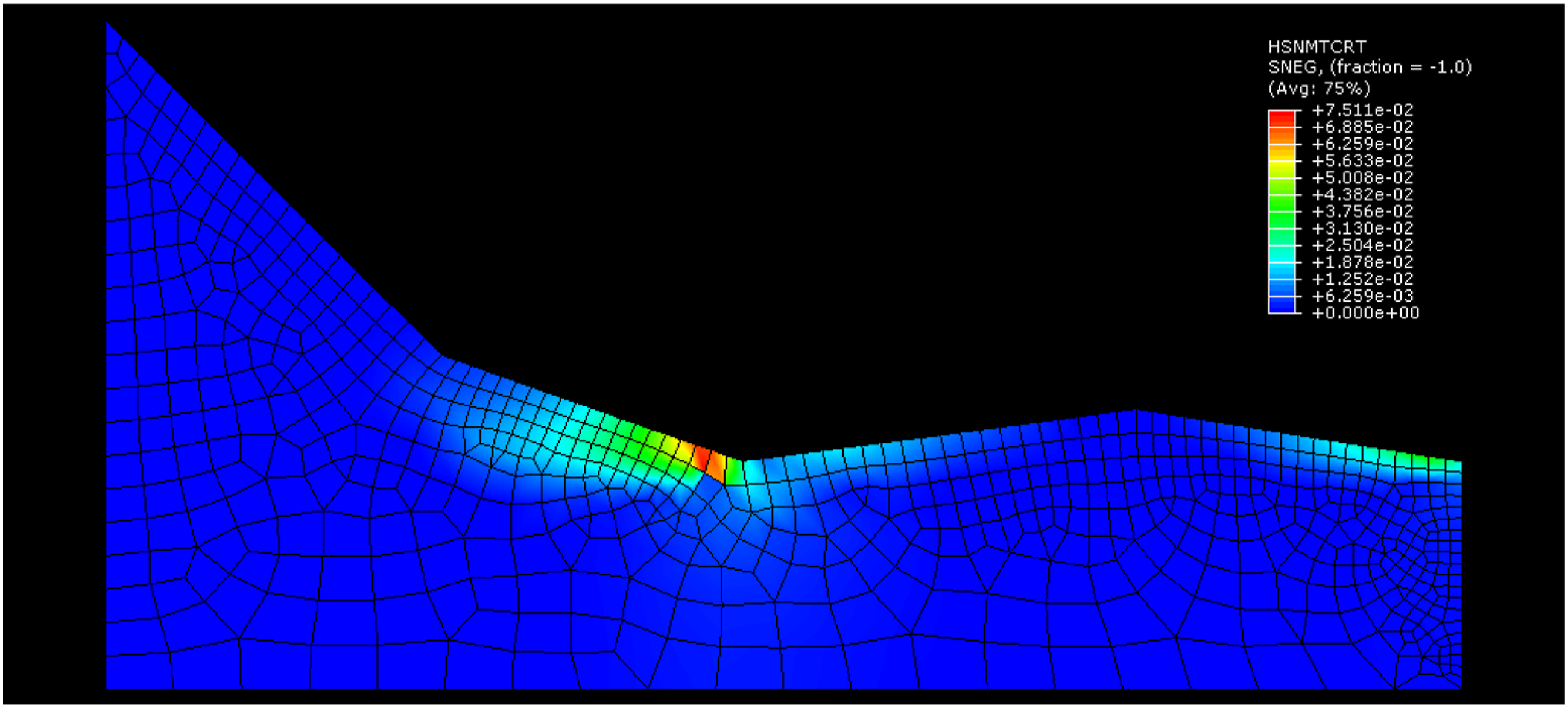
Results from FEA ABAQUS showing the Hashin damage distribution in the quarter lamina simulating the necking-tab region.
These results indicate the region in the vicinity of the grips is more likely to cause the onset of damage in the specimen due to stress concentration in the necking regions. Since the stress concentration is expected to be the dominant factor for failure under tension leading to brittle cracking and catastrophic failure, this research aims to examine the topological optimization of the necking region connecting the grip and gage regions of the specimen (treating the tab and specimen as a single component). The investigation uses a combination of two powerful tools (FEA and ML) to improve current FEA prediction processes, topological optimization and computational speed, performance and efficiency.
Literature review
Dynamic tension testing on coupon specimens in a laboratory environment typically involves smaller-sized geometries, on the order of millimeters since the speeds (and forces) involved are lower. 6 For a 10 mm long specimen in uniaxial loading, the test rig (either tension or compression) would need to be moving at 10 m/s in order to provide an initial strain rate of 1000 s−1, where the loading velocity divided by gage length. Moving to larger specimens which are often necessary to install strain gages and/or span the meso/macro-scale behavior (on the order of a few centimeters in length) and accounting for specimen shape since high-speed dynamic loads often force stress concentrations in unwanted regions (e.g. near the ends and not in the gage region) requires revisiting the test methodology. Developing new protocols with validated solutions is both costly and time consuming. Machine learning is a powerful new tool that may have the solution to this problem. 7 ML is a subset of artificial intelligence, devised to use computational power along with statistical methods and optimization algorithms to bolster the traditional human-based capabilities in the engineering environments. This allows both ML to achieve the goals of the project and investigations more quickly and efficiently. Multiple studies demonstrate the importance of implementing ML into traditionally laborious works, such as imaging and pattern identification and recognition, non-destructive testing, and topological optimization 8 ; the latter being a traditional method implemented for structural design purposes. Topological optimization has been studied for the last 35 years,9–11 taking advantage of the finite element methods involving generally manual iterative processes that extend beyond the current state of ML automatization times especially due to the development of Deep Neural Networks using Deep Learning Strategies. The current state of the art justifies the use of ML in topological optimization because of the significant reduction in computation time for obtaining quantitatively equitable solutions to a given structural problem. The methods employed by ML include the Physics Informed Neural Network for higher accuracy results, which is essentially an additional constraint for the results obtained from the Artificial Neural Network (ANN) to guarantee the solution is physically meaningful. This employs the usage of the partial differential equations of the phenomenon observed or simulated in traditional FEA. Research has been conducted especially during the last decade in this subfield of artificial intelligence to implement ML strategies into the topological optimization and results are able to obtain time reductions of several orders of magnitude.12–17 Recently generated extrapolation experiments have even obtained geometries never seen before using ML. 18 As a corollary, it is possible then to use ML to design tension tests for composite materials that would prevent premature failure and failure outside the studied regions of interest, thereby reducing the setup times and number of replicate tests.
Therefore, using this technique it should be possible to design the ideal composite coupon specimens for tension testing at virtually any lab-achievable loading rate providing a higher time-efficiency and with less computational expensive than other current numerical method.
Materials and methods
The ML proof of concept implemented in this investigation must first demonstrate the capabilities of a Deep Learning Neural Network in predicting the BC of a structural plane stress conditions. The FEA model uses 2D shell SR4 elements since under simulated tensile conditions the out of plane stress components Representation of a multi-perceptron artificial neural network.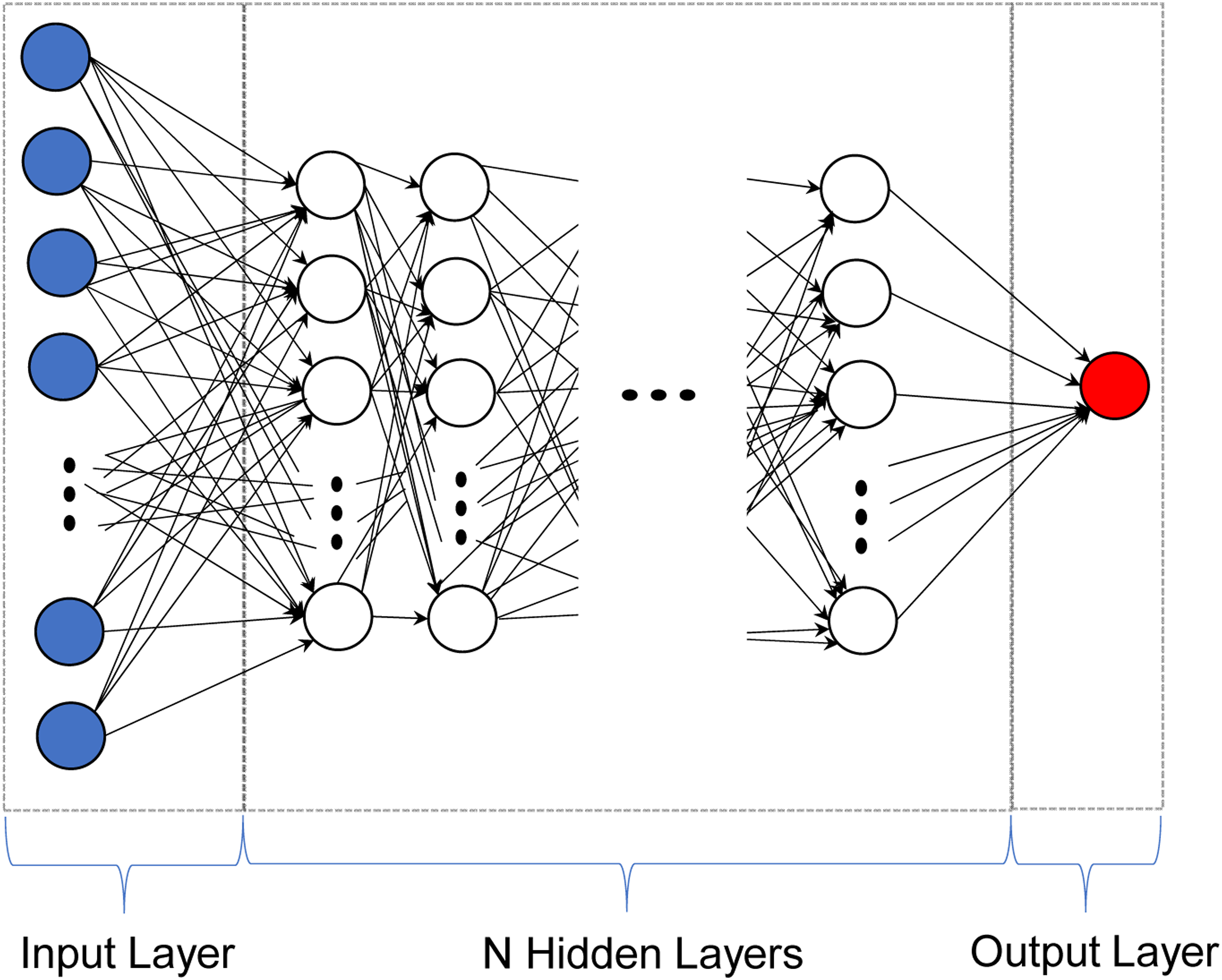
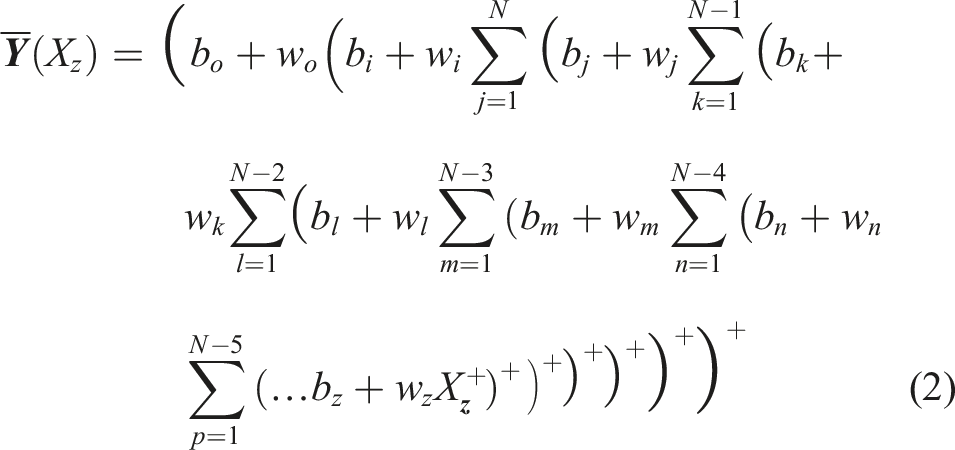
In this case a Multi-Perceptron (MLP) ANN is implemented and configured to predict outcomes using the provided inputs. This is the validation process and once the MLP parameters are tuned using a validation dataset, the model is tested using never before seen output. This testing accuracy is the deciding parameter for the model, and in the present study, the coefficient of determination R2 is used. The model generates a mathematical function of the inputs combining weights and biases composed into an activation function that becomes the model for the output. We can imagine the process of composing a linear activation function such as the Rectifier Linear Unit (ReLU) equation (1) in which only the positive part of the input is considered. This results in the mathematical model of the thNth layer ANN that can be described by equation (2). Variables 


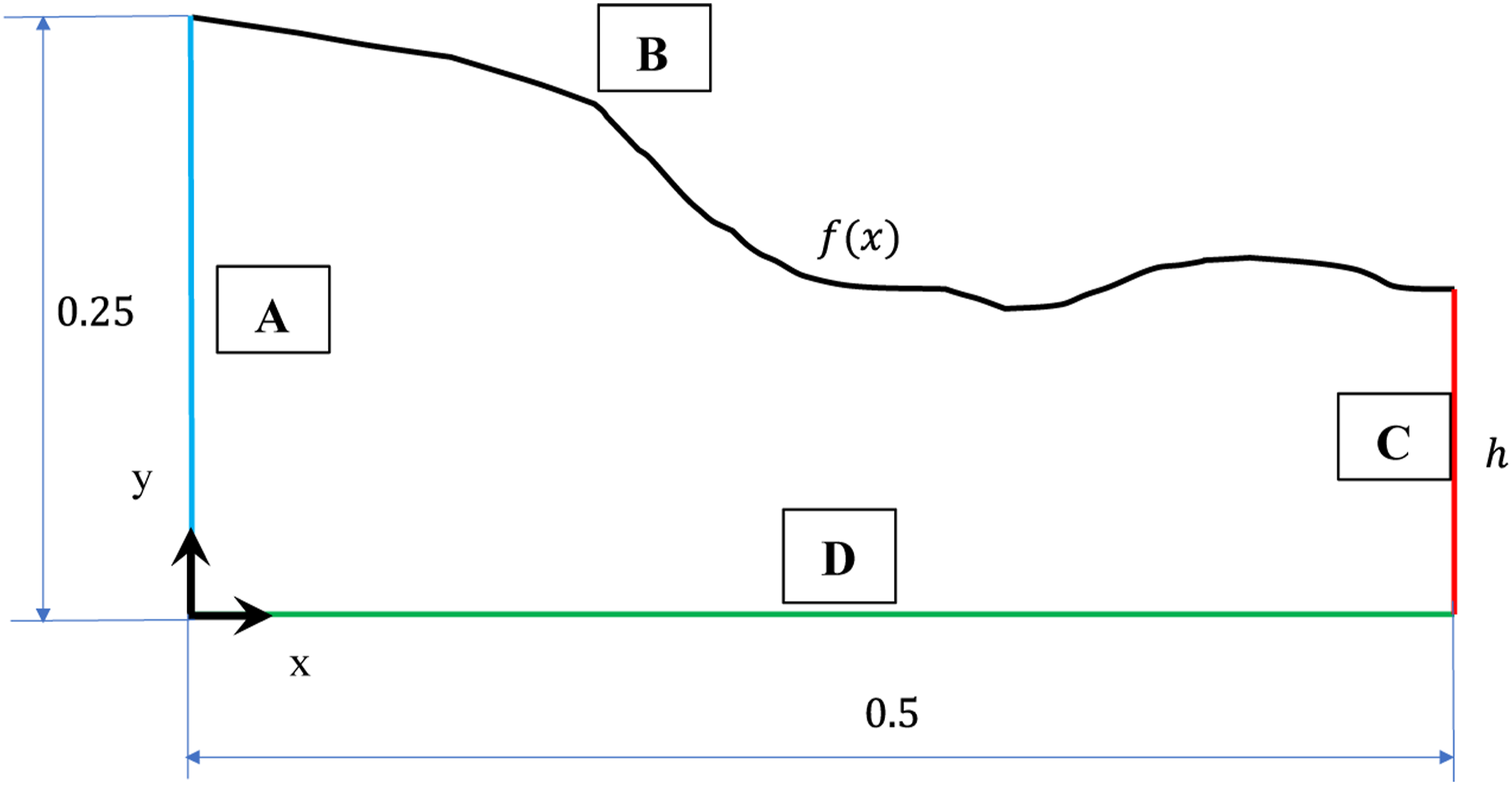
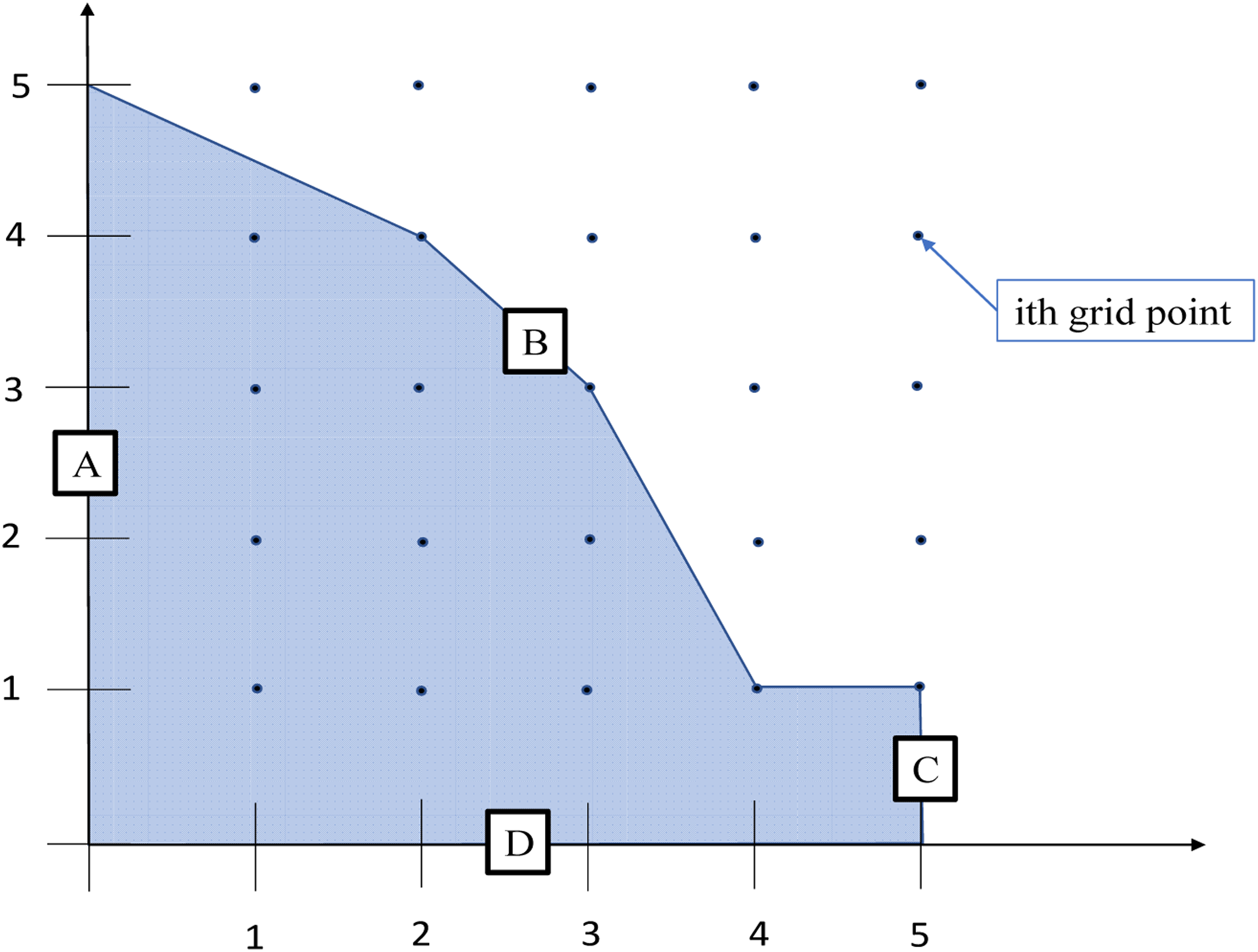
The ANN then uses stochastic gradient descent to optimize the difference in between the generated function and the desired output, minimizing a loss function which is the difference between these two datasets (i.e., the input data set generated at every step of the iteration method and the known outcome until the tolerance criteria is met). The stop conditions generally are residual tolerances or iteration limit set on both. The ANN fit to the known dataset and the validation set (a smaller set to verify the prediction performance) are both based on predefined values of Relative Root Mean Squared Error (RRMSE) for the fit and validation datasets, also defined as loss. The tolerance stop-criteria used was an RRMSE value of 1% for the fitting process (model and the training set), while a value of 5% was established for the validation (a small prediction set). For this proof of concept, the inputs are internal traction vectors Representation of the quarter sectioning of the necking-tab region to be generated for the FEA simulations of the composite specimen. Quarter section geometry of specimen with BC coded as follows: (left) in blue is a 2% uniformly distributed extension displacement; (bottom) in green is a limit on vertical displacement due to the axis of symmetry; (right) in red is the restraint in the horizontal displacement where height Quarter section geometry of specimen showing the method used to generate the 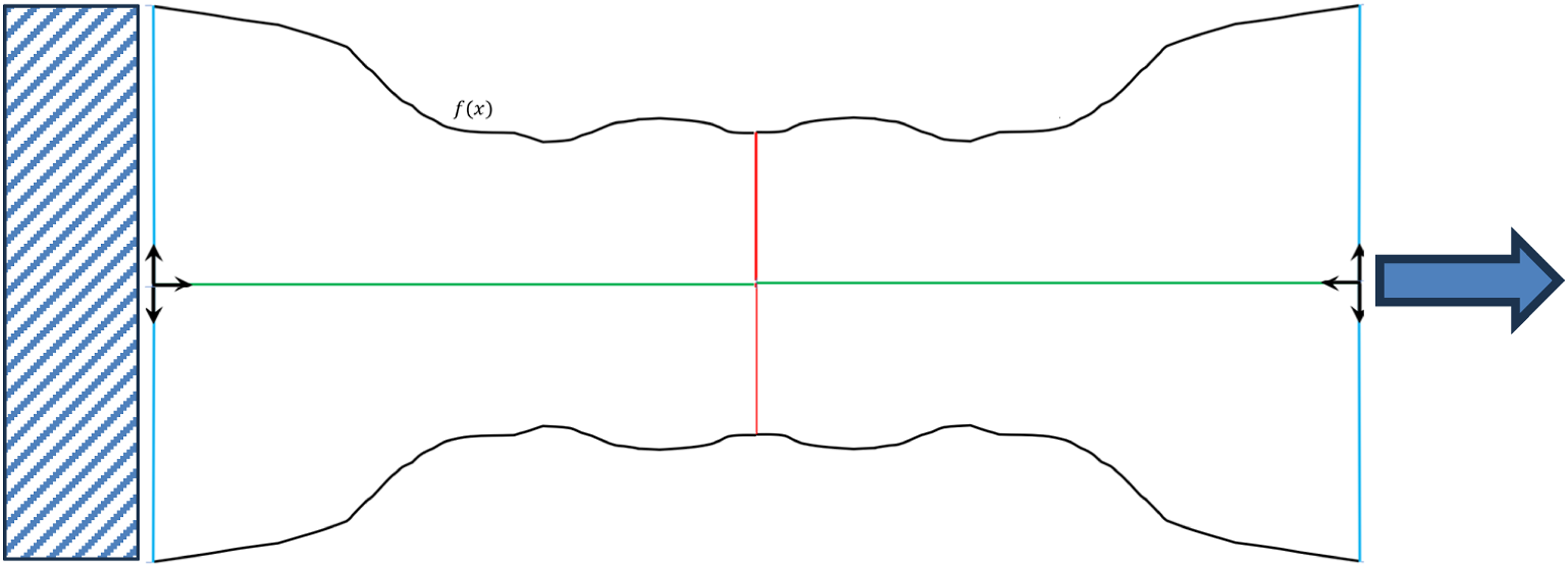
The design envelope has been selected to mimic a tension specimen that cannot stretch at
For a quarter of symmetry ABAQUS simulation, this is equivalent to imposing a fixed condition on the edge (
Results and discussion
The FEA results are the stress tensor components extracted from the traction vector along regions A and C in Figure 8 and shown for a singled-out geometry in Figure 10. These results are the inputs to train the ML ANN to provide a prediction of the profile geometries given only their stress distribution. The results obtained in the validation stage of this ANN are summarized in Table 1 consisting of the prediction of 10 different profiles displayed in Figure 11 resulting in a predicted accuracy of R2 = 0.98. Here the ANN is composed of a total of six layers, #1 is the input layer, #2-5 are the hidden dense layers accounting for a total of 638 neurons, the last #6 layer is the output layer which renders the final result as output. All of these neurons, composition of biases, and weights compose the ReLU activation function for a total of 78,669 parameters that define the model for prediction and the geometries based on the 48,636 input stress points from every region in Figure 8. Stress components on the boundaries of the specimen A and C (Top), used as input for the ANN to predict the specimen’s geometry (Bottom). Actual and predicted of 10 specimen geometries obtained after the MLP ANN model concludes the fitting/training process, which rendered a R2 = 0.98 in predicted accuracy. Blue is the original geometry and green is the predicted geometry.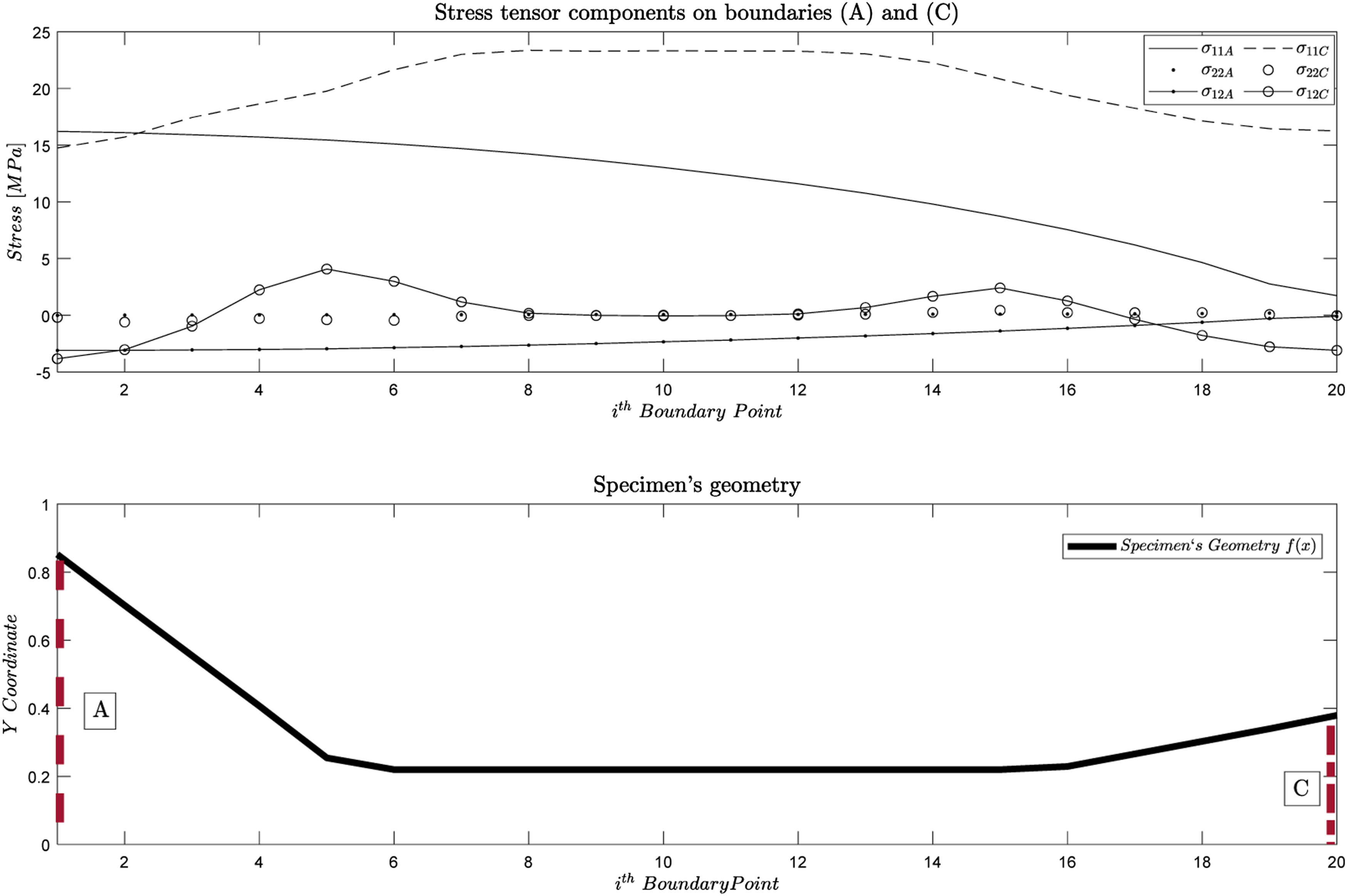
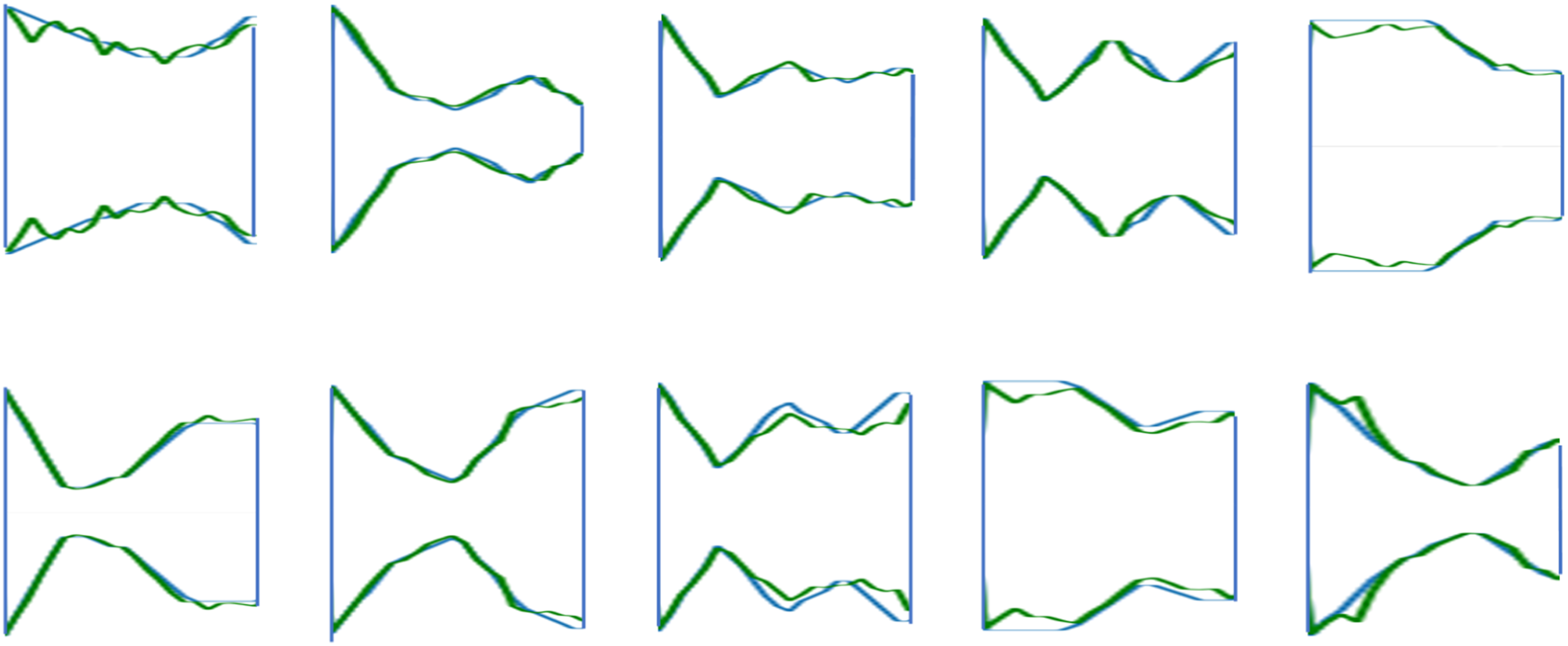
Therefore, it can be concluded the training and validation/prediction process are deemed successful and thus the model reliably predicts the specimen’s profiles. It should be emphasized that the model does not know the geometry of the specimen to be predicted as this remains unseen in the validation and test datasets. The model is instead determining their shapes only with the information of the stress components from the traction vector.
With the predicted results validating the proof of concept, the next step is using the same prediction capabilities on the geometric parameters of composite materials. Both fiber orientation and geometry of the composite can be optimized for these transient stresses while complying with the established requirements of both design and structural limits. Furthermore, the advantage of this ML and topologic optimization is meshless as compared to the traditional numerical simulations, delivering high quality results with time and computational advantages, including in the time integration spare process. Since there is no need for time integration schemes required of explicit analysis, realistic time savings in the order of 10,000:1 are attainable using this methodology. No iterations in the ANN are necessary when the same training data set is used to predict the outcome. Here geometry prediction will be combined with internal stress and damage prediction of composite specimens (similar to the visualization in Figure 10). Finite element results for a non-optimized transient equivalent stress wave are shown in Figure 12 indicating the areas of high stress within a composite with two fiber orientations. Stress distribution through a composite with two different fiber orientations during a dynamic tension test using FE ABAQUS, sequence times corresponding to 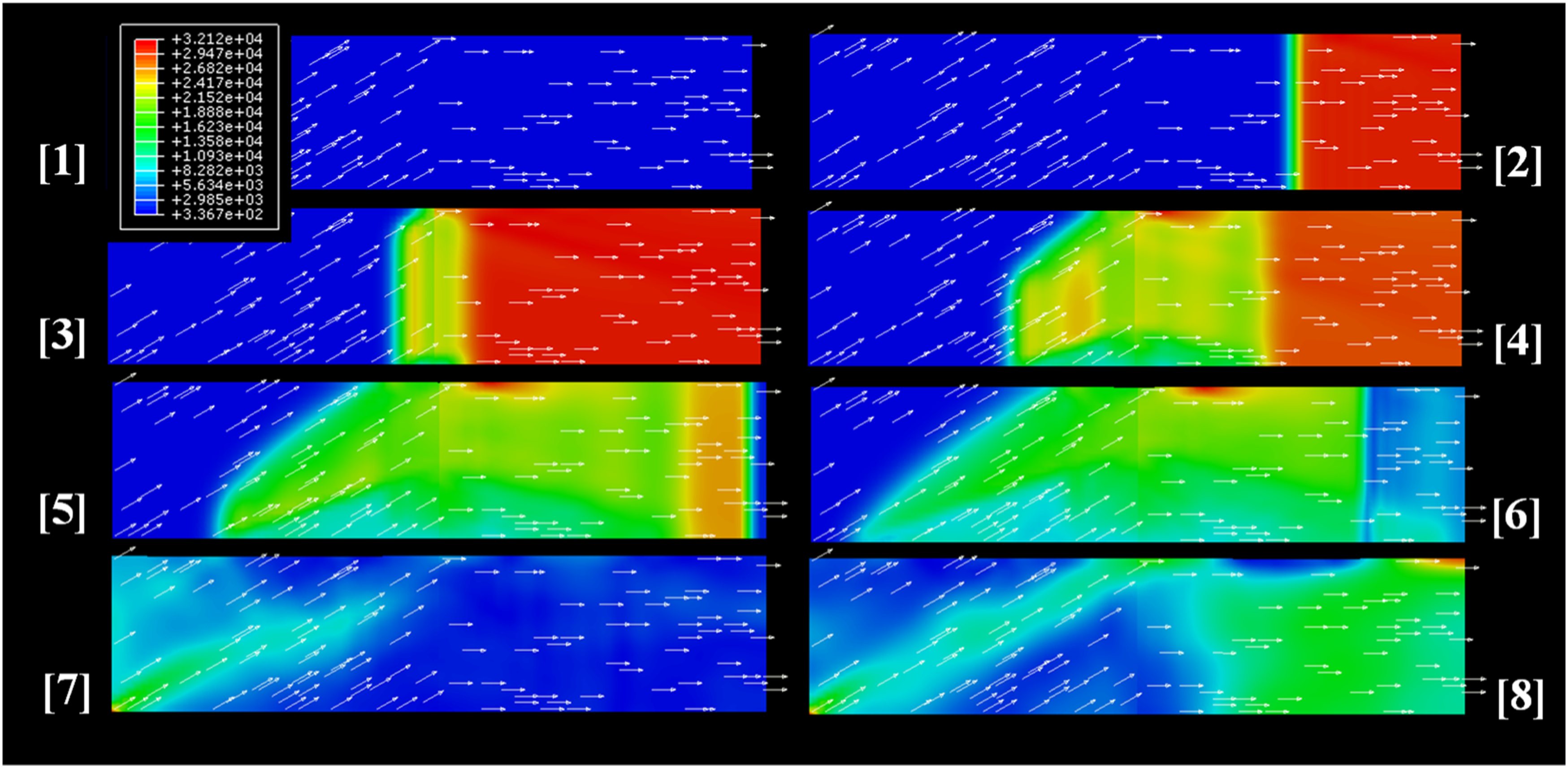
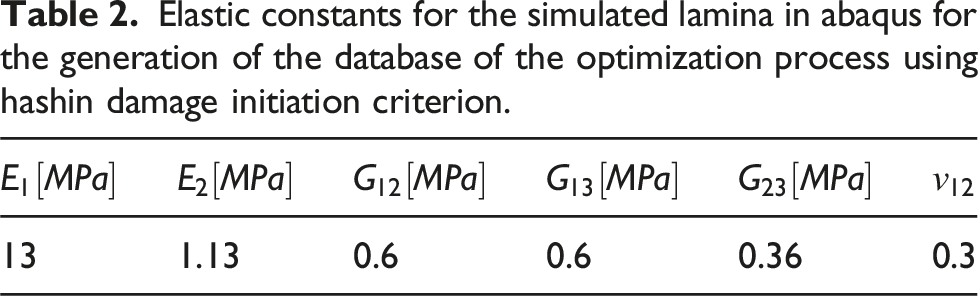
Elastic constants for the simulated lamina in abaqus for the generation of the database of the optimization process using hashin damage initiation criterion.
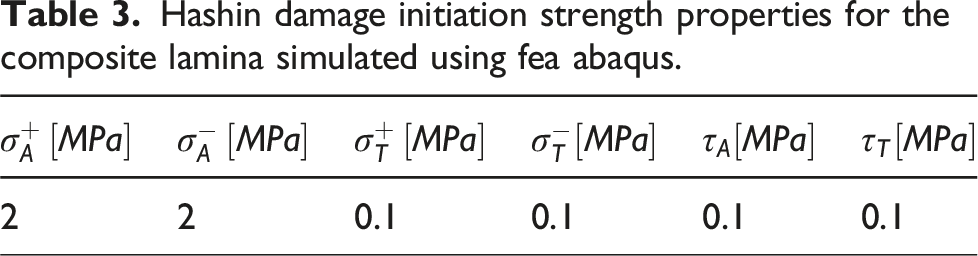
Hashin damage initiation strength properties for the composite lamina simulated using fea abaqus.
Damage evolution material constants used for the fea abaqus simulations for the database generation in the optimization process.
For tensile failure mode:
Compressive Fiber Mode:
Matrix Tension:
Matrix Compression:
Where the terms are respectively:
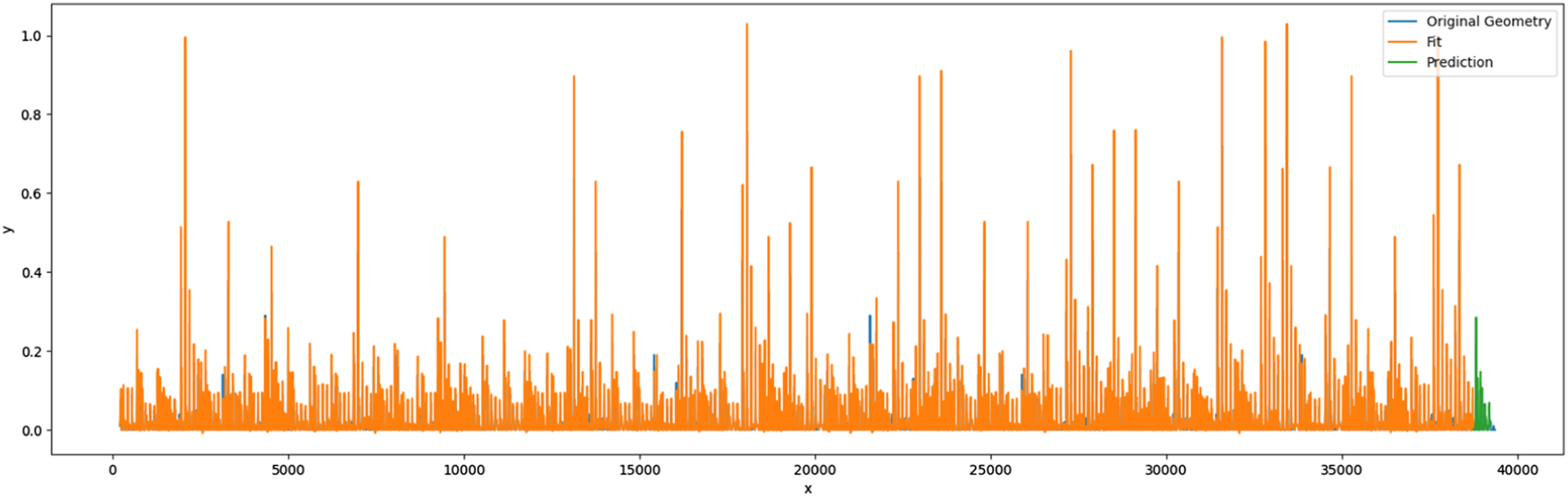
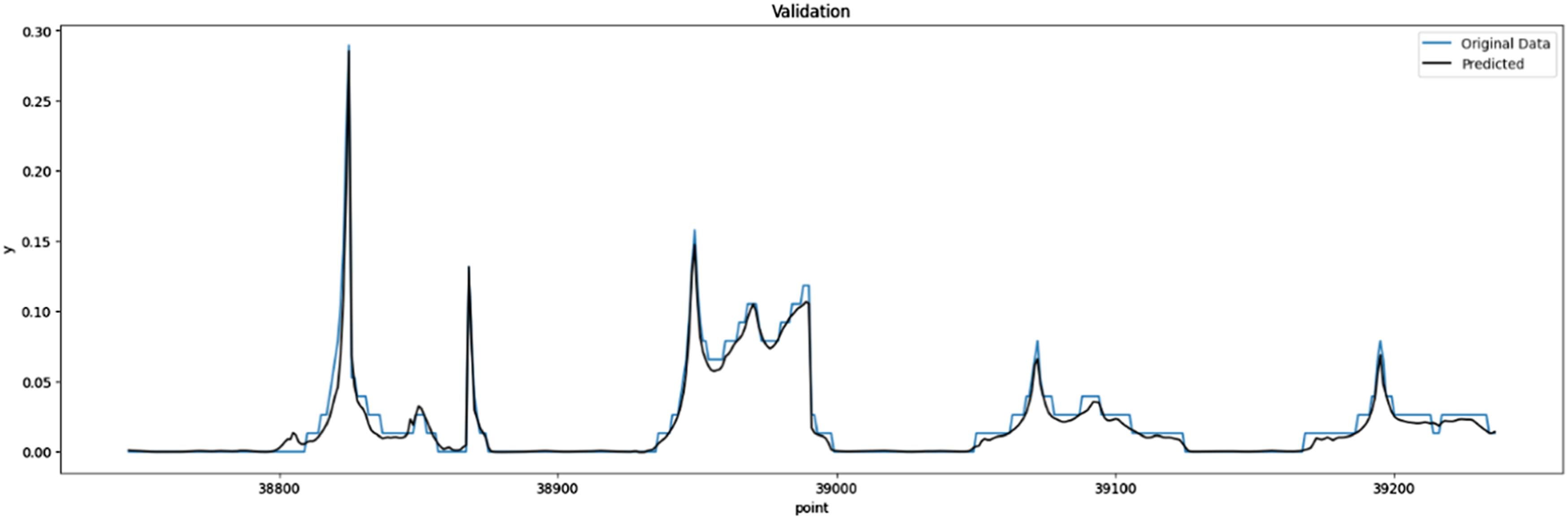
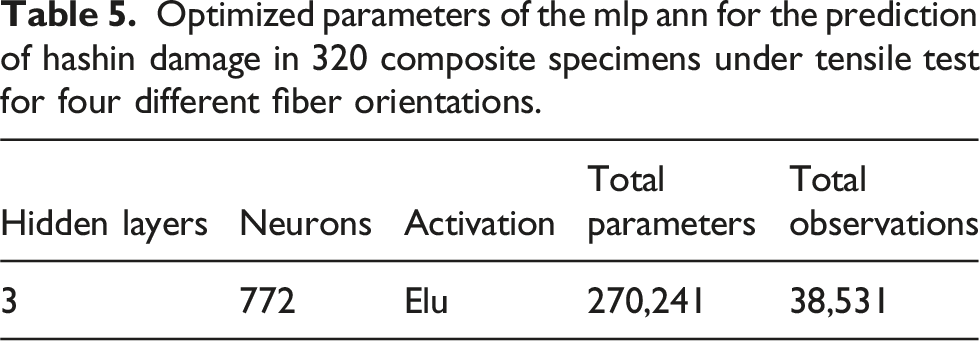
This approach is complemented with the addition of the fiber orientation as a variable since the goal is to predict damage locally at the boundary regions A, B and C indicated in Figure 8 using unseen geometries for different fiber orientations. In this case, the input database for the ANN is grip geometries and the output to fit and model are the Hashin damage in the mentioned boundary regions. Both are shown in Figure 13 using matrix damage as output. Then by combining the prediction capabilities of both methods, that is, using ML to predict stresses and damage in composites and to topologically optimize the designs, we can thus set the initial steps to design improved/optimized coupon composite specimens for dynamic tensile testing. Results from the damage fit data are shown in Figure 14. The local predicted damage in the composite for four different fiber orientations is displayed in Figure 15. Details for the ANN are summarized in Table 5. The NN is composed of a total of five layers, #1 is the input layer, #2-4 are the hidden dense layers accounting for a total of 772 neurons, the last #5 layer is the output layer which renders the final result as output. All of these neurons, composition of biases, and weights compose the Elu activation function for a total of 270,241 parameters that define the model for prediction and the geometries based on the 38,531 input stress points from every region provided in Figure 8. Top. Results from the FEA of the local damage on the necking-tab region of the simulated specimens on the boundary regions highlighted A, B and C. Bottom. Geometry of the quarter sectioned necking-tab region of the simulated composite specimen. Results from the training process of the ANN using the Hashin damage criterion as output for a total of 320 FEA simulations using ABAQUS of composite coupon specimen geometries, and specimen and fiber orientations as inputs. Horizontal axis represents the boundary point on the regions A, B and C whereas the vertical axis represents the local damage on the respective boundary point. Validation results of the local Hashin damage criterion in the colored highlighted regions from Figure 8 using ANN. (Blue curve) shows original FEA predicted damage, (black curve) shows the predicted local damage in the exact same regions with a 97% accuracy of one geometry for four different fiber orientations. Optimized parameters of the mlp ann for the prediction of hashin damage in 320 composite specimens under tensile test for four different fiber orientations.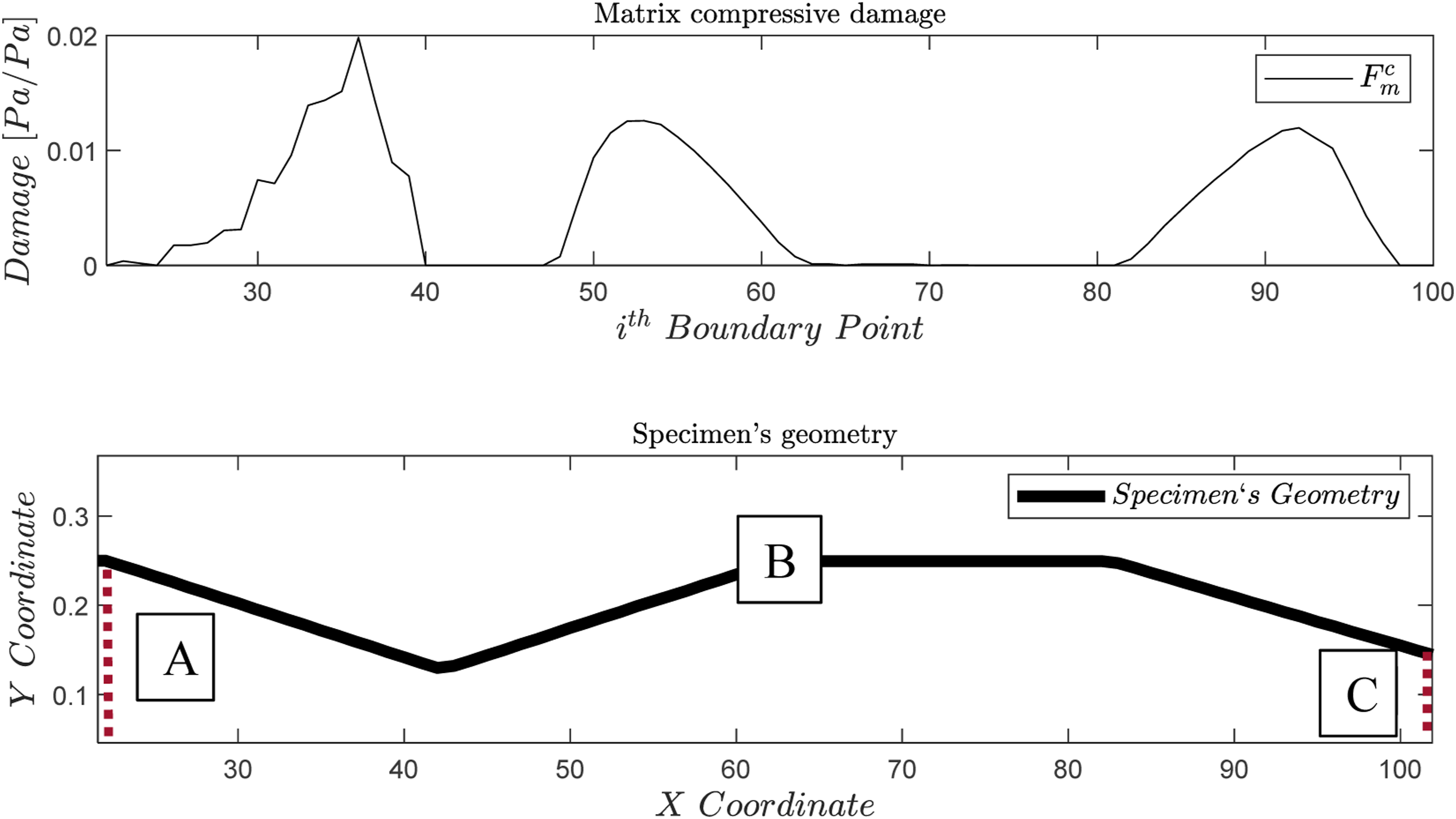
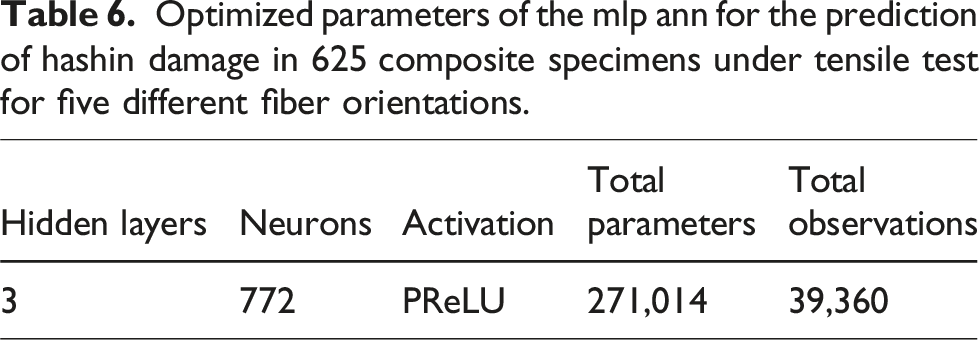
The results represent one possible specimen geometry. Figure 16 provides a visualization of 625 possible tensile specimen geometries that delimit a surface map of Hashin damage in tension across all five fiber orientations (0°, 22.5°, 45°, 67.5°, 90°) using an ANN model summarized in Table 6. Parameter descriptions are similar to Table 5. These three large volume simulation tests are completed in fractions of a second which is orders of magnitude faster than even a single FEA simulation of equivalent complexity. Predicted averaged Hashin damage criterion for a total of 625 different specimen geometries with five different fiber orientations. Validation results show 99% accuracy with respect to FEA. Optimized parameters of the mlp ann for the prediction of hashin damage in 625 composite specimens under tensile test for five different fiber orientations.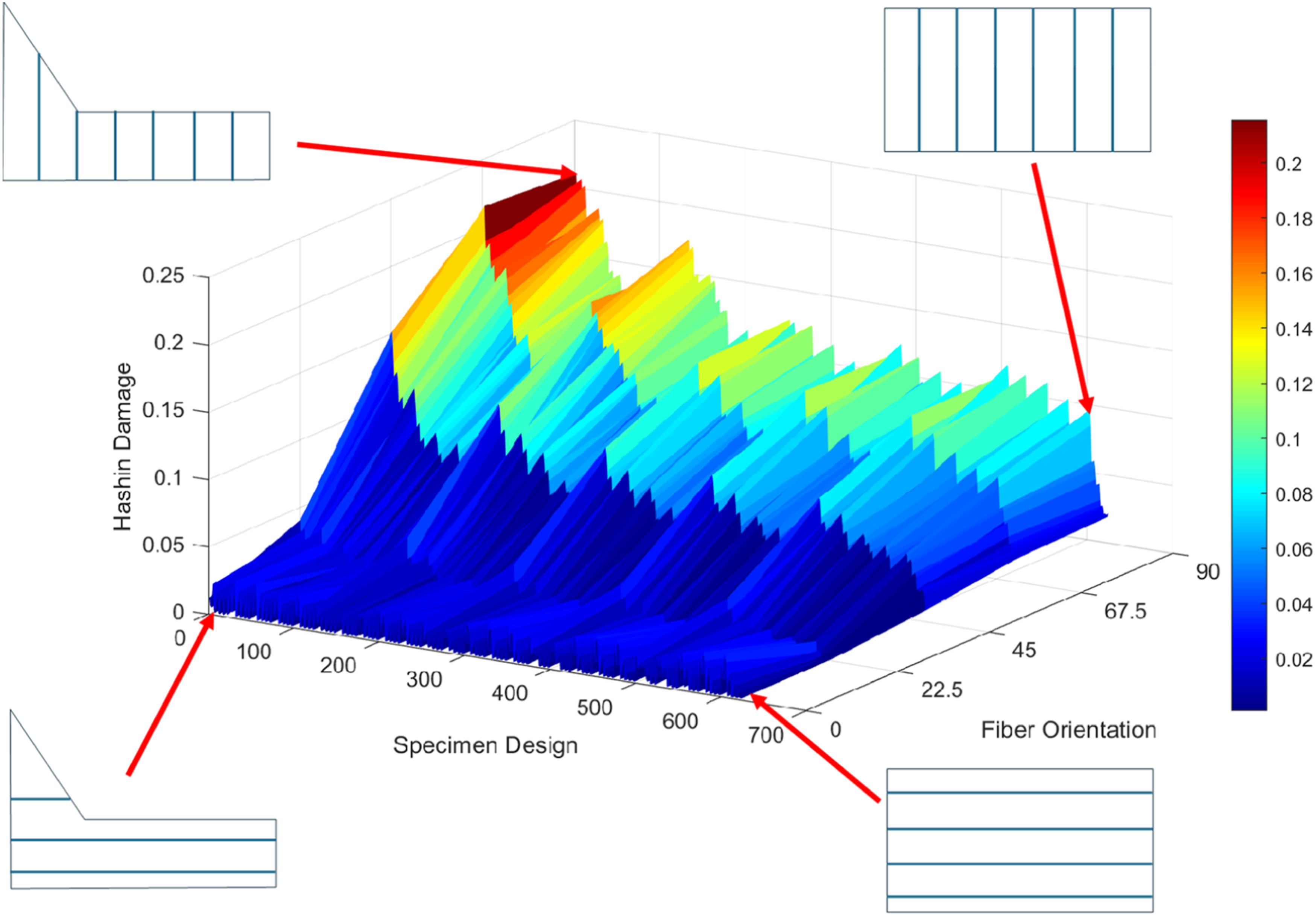
Conclusions
Developing new test protocols for dynamic loading rates on composites specimens requires significant investment in both the physical and numerical systems. Through ML, we have been able to devise a strategy that accelerates the numerical computations to optimize the specimen geometries for reducing the number of unsuccessful tests. The ideal inputs for training the ANN are the location of specimen failure and a uniformly distributed stress field in the internally studied cross section, and if correctly implemented in a ML methodology, the specific specimen geometry for a given composite fiber orientation can be computed almost instantaneously to ensure that failure will occur in the gage region of the specimens.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.