
Abstract
This study proposes a motor fault diagnosis method that uses the measurement and analysis of alternating current (AC) signals. This approach enables assessment of motor operational health by classifying it as either normal or exhibiting one of three specific faults: inner race defect, outer race defect, or misalignment. The diagnostic process starts with the motor current signal, which is transformed using a continuous wavelet transform to create a time-frequency representation. Subsequently, a deep learning framework is developed, comprising two main sub-networks: a feature extractor with an attention mechanism and a fault-classification neural network specifically tailored to identify common AC-motor faults. The proposed method outperformed the other methods in terms of diagnostic accuracy across various operating conditions on two public benchmark datasets. Furthermore, experimental evaluation on public datasets confirmed the framework’s effectiveness for both three-phase induction motors and permanent-magnet synchronous motors. The results show that the proposed model achieves higher accuracy while remaining lightweight, making it suitable for deployment on edge-computing devices in industrial environments.
Keywords
Introduction
Motor fault diagnosis is a vital area of research owing to its importance in ensuring the reliability and efficiency of motor-driven systems. The effective detection of motor faults can help to prevent costly breakdowns, reduce maintenance expenses, and minimize downtime in industrial operations. Traditional motor fault diagnosis techniques often rely on manual inspections and time-based maintenance schedules, which are inefficient and expensive. However, advanced diagnostic methods such as vibration analysis,1,2 current signature analysis,3,4 and thermal imaging 5 have emerged as powerful tools for early fault detection and predictive maintenance. These advanced techniques utilize sophisticated sensors and data analytics to monitor motor health in real time, enabling more precise and proactive maintenance strategies. Vibration analysis is a widely used methodology that has proven to be highly effective in motor diagnostics. However, the deployment of vibration sensors poses significant challenges because they often incur considerable costs and encounter installation difficulties, particularly in confined and acoustically complex environments.
Concurrently, motor current signature analysis (MCSA) has become a popular and efficient method for diagnosing faults and monitoring the health of electric motors.3,6 This approach is non-invasive, cost-effective, and fairly accurate, making it highly beneficial for detecting both electrical and mechanical issues. 4 It analyzes the frequency spectrum of the motor current to detect various mechanical and electrical faults. MCSA can provide valuable insights into the condition of motor components, such as bearings, rotor bars, and stator windings, by identifying specific frequency components and their corresponding amplitudes. The widespread adoption of MCSA in industrial applications has led to improved predictive maintenance strategies, 7 reduced downtimes, and increased overall equipment effectiveness. The integration of machine-learning methods into MCSA has significantly enhanced its capabilities and effectiveness.8,9 Machine-learning algorithms can efficiently analyze large amounts of current signature data, identify complex patterns, and make accurate predictions regarding motor health and potential faults. 10 They offer several notable advantages: (i) Improved accuracy: Machine-learning models can identify subtle anomalies in current signatures that traditional analytical methods may overlook, leading to more precise fault diagnoses. (ii) Automated fault classification: By training on extensive datasets, machine-learning algorithms can autonomously categorize various types of faults, thereby reducing the need for expert interpretation and streamlining diagnostic processes. (iii) Adaptability: As machine-learning models continuously learn from new data, they can adjust to changes in motor characteristics over time, maintaining diagnostic accuracy throughout the equipment life cycle. The integration of machine learning with MCSA signifies a significant advancement in motor health monitoring and provides more robust, efficient, and intelligent diagnostic capabilities for industrial applications. 11 With the rapid advancements in artificial intelligence technologies over the past decade, deep-learning-based approaches for MCSA have shown considerable promise in detecting faults within motor-driven systems.12,13
The current signal to be analyzed typically exhibits characteristics in both the frequency and time domains. Consequently, transforming it into the frequency or time-frequency domain for further analysis is a commonly used approach. 14 This approach, known as time-frequency analysis (TFA), typically involves initially converting the current signal from the time domain into a time-frequency representation (TFR) and then employing a specific technique to classify the resulting TFR. The TFA method facilitates the detection and identification of various motor faults by examining temporal variations in the spectral characteristics of the current signal. 15 Compared with traditional spectrum-based analysis, which only reflects characteristics in the frequency domain, TFA-based technology can obtain both time- and frequency-domain features of current signals and then extract critical features for motor fault diagnosis under various operating conditions. 3 Numerous studies have validated the efficacy of TFA for fault detection. For example, the application of MCSA for planetary gearbox fault diagnosis was explored and it was found that transforming the time-domain current into the frequency domain markedly enhanced the classification accuracy for fault detection. 16 Short-time Fourier transform (STFT) is a widely used TFA technique for motor fault diagnosis. The integration of STFT into an advanced transient current signature analysis offered substantial benefits for diagnosing motors operating under variable speeds or load conditions. 17 Moreover, STFT has been effectively applied to detect stator winding faults in permanent-magnet synchronous motors (PMSMs) under diverse operating conditions. 18 The integration of STFT with speed-frequency order methods has shown potential in capturing the order features of non-stationary signals, which is advantageous for fault diagnosis in mechanical systems with variable speeds, such as wind turbine transmissions. 19 Another well-known methodology, known as the continuous wavelet transform (CWT), decomposes a signal into a set of wavelets, each representing a specific scale and position in time. The multiresolution analysis capability of CWT enables it to capture both high-frequency details and low-frequency trends simultaneously, providing a comprehensive view of the time-frequency characteristics of the signal.20,21 Interestingly, although some studies did not focus on using CWT for diagnosing faults in rotating machinery, they incorporated wavelet-based techniques into their fault diagnosis methods. Yuan et al. 22 discussed wavelet packet decomposition (WPD) and proposed an optimized WPD method for decomposing vibration signals and extracting fault information in the frequency domain. A feature extraction method based on adaptive multiwavelet transform and local tangent space alignment was introduced for fault diagnosis in rotating machinery. 23 Notably, various studies have emphasized the significance of TFA and feature extraction methods in this field.24,25
In addition, numerous studies have investigated techniques for extracting essential features and classifying faults in the acquired TFRs. Chen et al. 26 proposed a uniform local binary pattern, which is a computationally efficient method for texture analysis, to compute histograms from TFRs and characterize fault features effectively. A convolutional neural network (CNN) was utilized to learn discriminative features from TFRs and provide accurate fault classification. 27 A hybrid architecture combining a deep CNN (DCNN) and long short-term memory (LSTM) was introduced, in which the DCNN was utilized for the high-level representation of spatial features and LSTM was employed for processing temporal information. 28 DCNNs have exhibited excellent performance in feature extraction and classification tasks based on TFRs for motor diagnosis applications.29–32 Moreover, recent studies have explored efficient techniques for industrial monitoring applications. Embedded microcontroller-based sensing and control of motor systems also play an important role in practical implementations. 33 Fahad et al. 34 proposed an optimized YOLOv8x model to improve detection efficiency, while Zhai et al. 35 developed a learning-based noise separation method for substation anomaly detection.
In contrast to vibration-based diagnostics, which require direct access to the motor and installation of sensors on the machine body, MCSA can be conducted by simply measuring the current flowing along the power lines, making it a cost-effective and easily implementable solution in industrial environments.3,7 MCSA is particularly effective in detecting a range of faults, including both electrical issues (such as problems with stator windings and broken rotor bars) and mechanical failures (such as bearing defects and misalignment) by analyzing the characteristic changes in current.36,37 It is suitable for both induction motors and PMSMs, and can be applied under various loads and operating conditions. Although MCSA is widely used for motor monitoring, the measured current signals may be affected by electrical noise, including power supply harmonics, electromagnetic interference, and inverter switching noise. These disturbances may overlap with fault-related frequency components, thereby reducing diagnostic reliability. Consequently, this study addresses these challenges by developing an MCSA-based motor fault diagnosis framework that integrates TFA with deep-learning-based classification. Noise robustness is enhanced through CWT-based TFA and logarithmic magnitude scaling, which together improve the separability of fault-related features from background noise. The main contributions of this study are summarized as follows:
(1) An appropriate display configuration for the TFR, in which both frequency and magnitude are represented on logarithmic scales, is introduced. This visualization enhances the interpretability of the current scalogram and allows more accurate fault-related feature analysis across a wide frequency range.
(2) A lightweight deep convolutional neural network (DCNN) inspired by the VGG-16 backbone and integrated with an attention mechanism is proposed. The architecture significantly reduces parameter complexity (by approximately 93.51% compared with VGG-16) while maintaining high classification performance, enabling deployment on edge computing devices with limited computational resources.
(3) Comprehensive experimental validation is conducted using two publicly available benchmark datasets: the KAIST dataset for induction motors and the Paderborn dataset for permanent-magnet synchronous motors. The proposed model consistently achieves the highest diagnostic accuracy across various load conditions and motor types, demonstrating superior robustness and generalization capability.
(4) This study establishes a generalizable diagnostic framework that combines continuous wavelet transform-based time-frequency analysis with a deep-learning classifier, offering a scalable and practical solution for real-world motor condition monitoring.
The remainder of this paper is organized as follows. The second section presents the theoretical background underlying the proposed method. The third section describes the diagnostic framework and details its implementation procedure. The fourth section reports the experimental results obtained using a publicly available benchmark dataset. The fifth section provides additional validation using the Paderborn dataset and further evaluates the proposed framework through comparative analysis and edge deployment experiments. The sixth section concludes the article and highlights directions for future research.
Theoretical background
This section presents the theoretical foundations necessary to understand the methodology proposed in this study. It starts with an introduction to the TFR used, followed by an exploration of the deep-learning techniques applied to analyze the time-frequency data.
TFR
Scalogram using CWT
CWT is a powerful signal processing technique that facilitates the analysis of non-stationary signals across multiple scales and frequencies. In contrast to Fourier transforms, which are limited to providing frequency information, CWT results in a wavelet-scale spectrum (scalogram) that offers the advantage of both time- and frequency-localized information.
38
This dual capability makes CWT particularly useful for analyzing signals that exhibit transient characteristics or have a frequency content that evolves over time. Let a mother wavelet be denoted as
represents a family of wavelets, where the scaling factor

where the symbol * represents a complex conjugate operation. The temporal positioning of the wavelet is determined by parameter
In this study, the Morlet wavelet was selected as the mother wavelet for CWT computation. The Morlet wavelet is defined as a complex exponential modulated by a Gaussian envelope, enabling effective joint localization in both the time and frequency domains. 39 Its Gaussian structure enables it to approach the lower limit of the Heisenberg uncertainty principle, achieving an optimal balance between time and frequency resolutions. One of the inherent properties of CWT is its capability for multi-resolution analysis, which provides higher frequency resolution at larger scales (low frequencies) and improved temporal resolution at smaller scales (high frequencies). This feature is particularly advantageous for motor current signature analysis, where precise spectral discrimination is needed for low-frequency fault characteristic components (such as bearing-related frequencies), while transient or modulation-induced high-frequency components require sufficient temporal localization. Consequently, the Morlet-based CWT demonstrated superior classification accuracy and more consistent diagnostic performance, leading to its integration into the proposed framework.
More about the scalogram representation
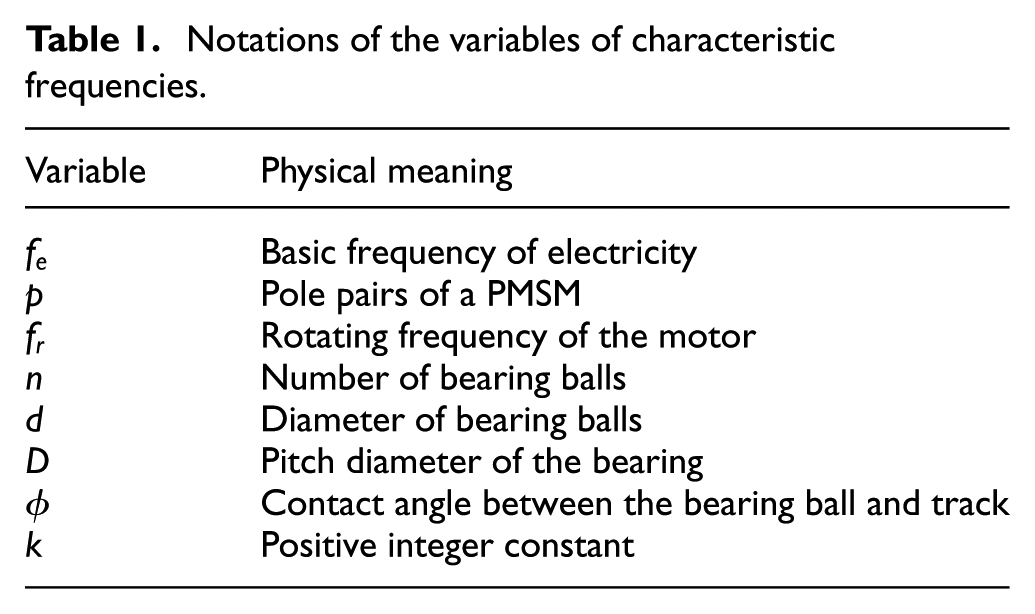
(1) Characteristic frequency: The horizontal axis of a scalogram indicates the time, whereas the vertical axis represents the frequency. The time interval selection depends on the number of repeated current waveforms that we wish to observe. A time interval of 0.4 s is suitable for a typical alternating current (AC) signal operating at 50–60 Hz, as it allows for the capture of more than 20 waveforms for further analysis. Accordingly, the time range of the horizontal axis is set to 0.4 s when the AC motor operates at its nominal frequency. This study primarily focuses on analyzing mechanical faults, particularly those caused by rolling bearings, such as inner and outer race failures, which lead to subsequent imbalances and misalignments. When diagnosing these fault conditions, observing several specific frequency components is crucial, as described below.40,41
Characteristic frequency on inner race bearing faults:

Characteristic frequency on outer race bearing faults:
Sideband frequency on rolling elements (balls):
Sideband frequency on mechanical imbalance:

Here,
(2) Linear-scale versus logarithmic-scale display modes: A scalogram is a two-dimensional visualization that displays both time and frequency information. It typically features horizontal and vertical axes representing the time and frequency, respectively, with colors indicating the magnitude of the signal. Let us consider the time-domain signal depicted in Figure 1, which lasts for 0.4 s. Figure 2 presents the scalogram using four different display modes: (a) both the frequency and magnitude are shown using linear scales; (b) the frequency is on a linear scale and the magnitude is on a logarithmic scale; (c) the frequency is on a logarithmic scale and the magnitude is on a linear scale; and (d) both the frequency and magnitude are displayed using logarithmic scales. In these four scalograms, the horizontal axis represents the time period from 0 to 0.4 s, whereas the vertical axis covers frequencies from 0 to 500 Hz. It is clear that the visualization mode, which displays both the magnitude and frequency on logarithmic scales, is the easiest mode for observing the spectral magnitude across various frequencies and times. In addition to enhancing human interpretability, logarithmic scaling of both frequency and magnitude provides tangible benefits for deep-learning-based classification. For the frequency axis, motor current fault characteristic components are predominantly concentrated in the low-frequency region (0–500 Hz considered in this study). Under linear scaling, these critical components may occupy only a limited portion of the spatial representation, whereas logarithmic frequency scaling redistributes spectral information more evenly across the image, thereby enhancing the spatial discriminability of fault-related patterns for convolutional feature extraction. For the magnitude axis, logarithmic transformation effectively compresses the dynamic range of the scalogram. This non-linear compression suppresses dominant spectral components while emphasizing subtle low-energy fault features, resulting in a more balanced intensity distribution. Consequently, the input data fed to the DCNN exhibit improved numerical stability and reduced dominance of extreme-amplitude variations, facilitating more stable optimization and more discriminative feature learning, thereby improving classification performance. Therefore, this display mode was selected for the scalogram used in this study.
Notations of the variables of characteristic frequencies.
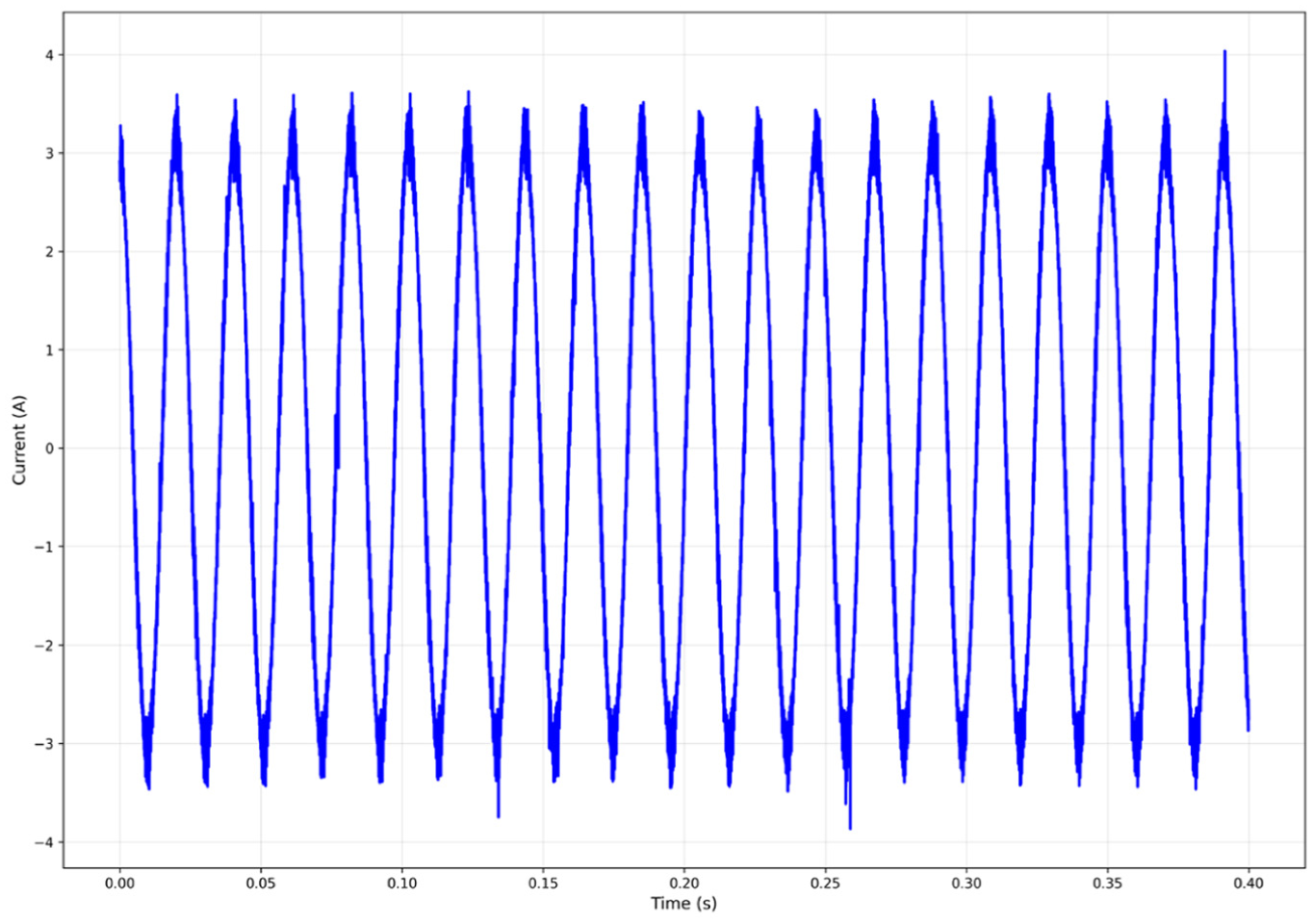
Time-domain current signal.
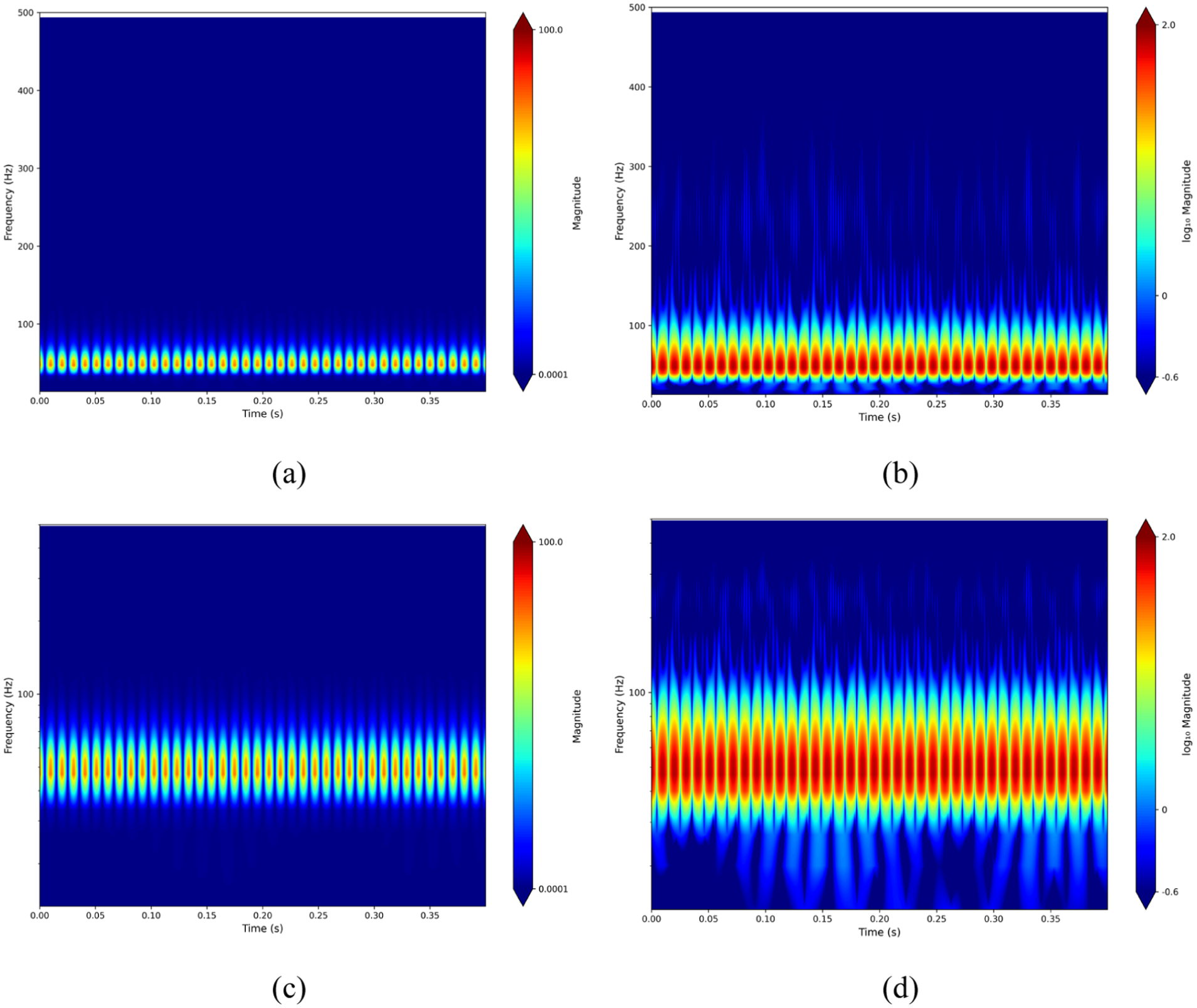
Scalograms in four different display modes.
DCNNs
DCNNs are deep-learning models specifically designed to automatically extract valuable features from grid-like data, such as images, using convolutional layers. Their effectiveness is heavily influenced by the backbone architecture that is employed. Well-known backbones such as the VGG 42 and ResNet 43 families have outperformed traditional methods and have become widely established as the foundation for deep-learning models. Inspired by the VGG-16 architecture, we introduce our own DCNN tailored for diagnosing motor fault categories. Thus, in this subsection, we first describe VGG-16, followed by an introduction to the proposed model.
The original VGG-16 model comprises 13 convolutional layers and 3 fully connected (FC) layers, totaling approximately 138 million parameters. The exact number of parameters varies based on factors such as the number of filters, filter size, input channels, and output categories. To enhance the model architecture for industrial applications, particularly for deployment in edge computing devices, this study reconfigures the model originally based on the VGG-16 model. Our redesign focuses on reducing the number of model parameters while striving to maintain comparable accuracy, thereby improving the efficiency and performance of the model. To achieve this objective, we reference the architecture of VGG-16 and integrate the attention mechanism into the VGG-16 backbone. The primary purpose of the attention mechanism is to enable the model to concentrate on relatively significant features within the images, which subsequently enhances its recognition capabilities and accuracy. Specifically, this mechanism assigns weights based on the significance of different regions of the input data, ensuring that important features receive greater focus while diminishing the influence of irrelevant features.
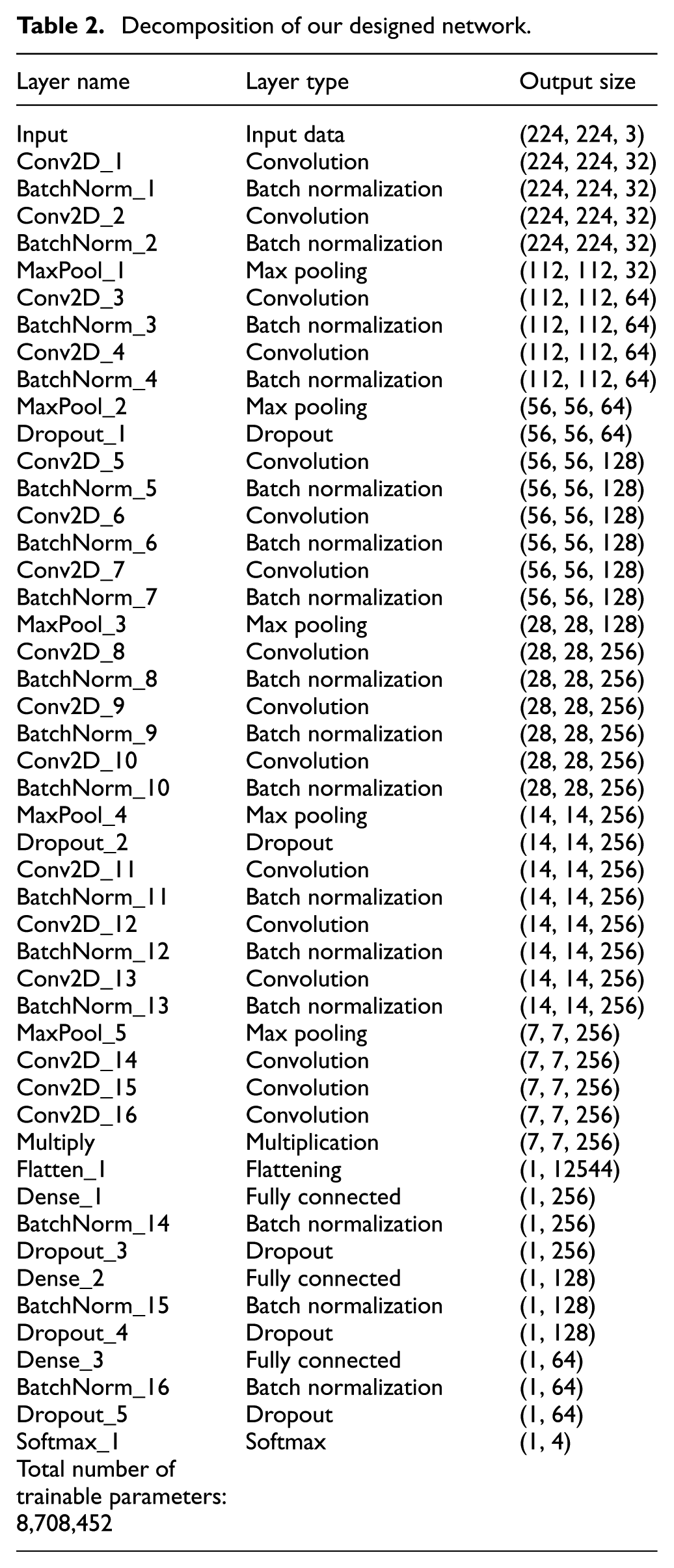
Figure 3 presents an architectural diagram of the proposed model, and a detailed composition is provided in Table 2. The model is designed based on the convolutional layers of VGG-16 and organized into five convolution blocks. To create a lightweight model, the number of kernels in each layer is halved. In addition, dropout layers are incorporated after the second and fourth blocks to reduce the risk of overfitting. A convolution-based attention module is integrated at the output of the final convolutional block, as illustrated in Figure 3. The attention mechanism consists of three consecutive 3 × 3 convolutional layers with ReLU activations, followed by a sigmoid activation to generate an attention map with the same spatial and channel dimensions as the input feature maps. The resulting attention weights are applied to the original features via element-wise multiplication, enabling adaptive refinement of spatial and channel responses. Classification is performed using three fully connected layers, followed by a softmax layer, which finally yields four categories of operating conditions: normal, inner race fault, outer race fault, and misalignment. To ensure stable training, all convolutional layers in our architecture (except for the attention mechanism) incorporate batch normalization and employ ReLU as the activation function. The proposed model contains 8,708,452 parameters, representing just 6.49% of the original VGG-16. The memory requirements for 16- and 32 b floating-point data types are approximately 16.61 and 33.22 MB, respectively. Therefore, this compact model is particularly well suited for deployment in edge computing devices with limited computational resources.
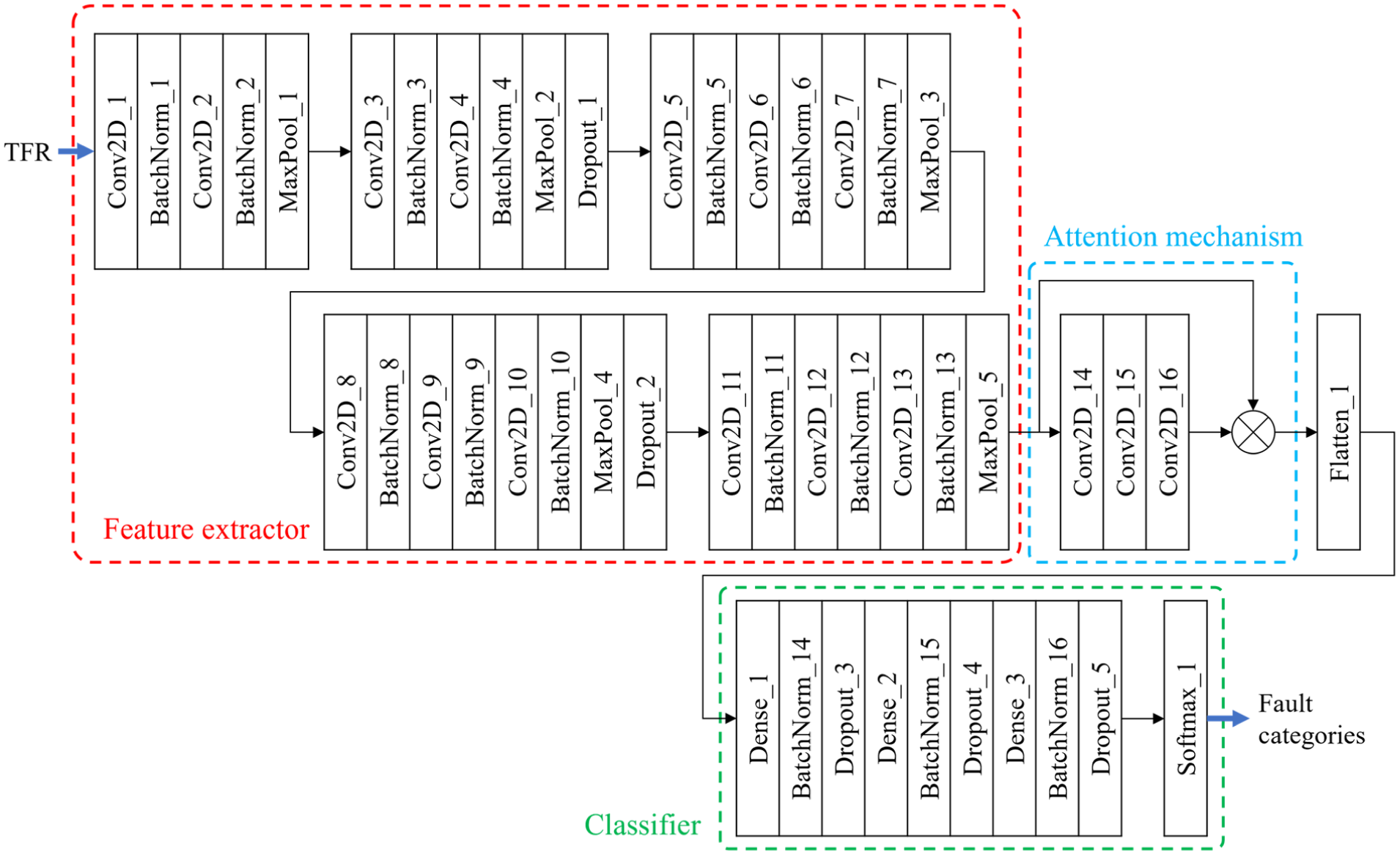
Architecture of our designed backbone.
Decomposition of our designed network.
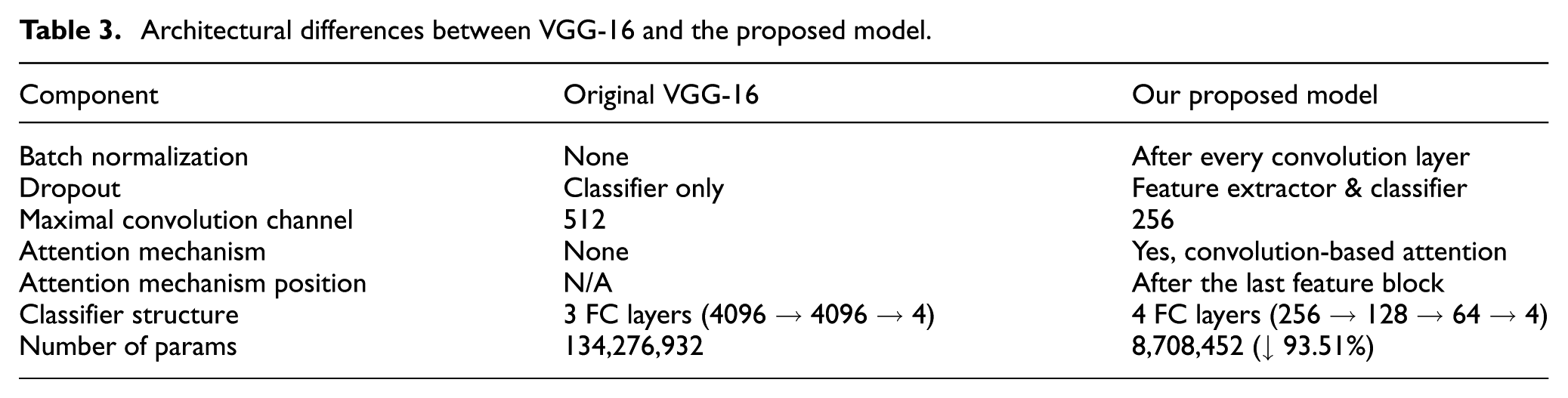
To further clarify the architectural differences between the original VGG-16 and the proposed model, a direct comparison is provided in Table 3. As summarized in the table, several structural refinements were introduced to achieve a lightweight yet effective architecture. Batch normalization was added after each convolutional layer to improve training stability. The maximum number of convolutional channels was reduced from 512 to 256 while preserving the original five-block hierarchical structure, thereby maintaining multi-scale feature extraction with substantially lower computational cost. A convolution-based block was inserted after the final convolutional block to enable spatial attention refinement. In addition, the classifier was redesigned into a compact fully connected structure (256 → 128 → 64 → 4), replacing the original 4096
Architectural differences between VGG-16 and the proposed model.
Methodology of the proposed diagnostic framework
This section outlines the overall procedure of the proposed diagnostic methodology, which is organized into two main stages. Initially, the time-domain current signal is transformed into a TFR using CWT, effectively capturing its temporal and spectral characteristics. Subsequently, a deep-learning-based classification model is employed to categorize the TFR as indicative of either a fault condition or a normal operational state. The TFR of the current signal takes the form of a scalogram, as introduced in the second section. The proposed classification model integrates a modified VGG-16 architecture with an attention mechanism, which work together to extract features, highlight critical features, and classify the categories as either normal or faulty.
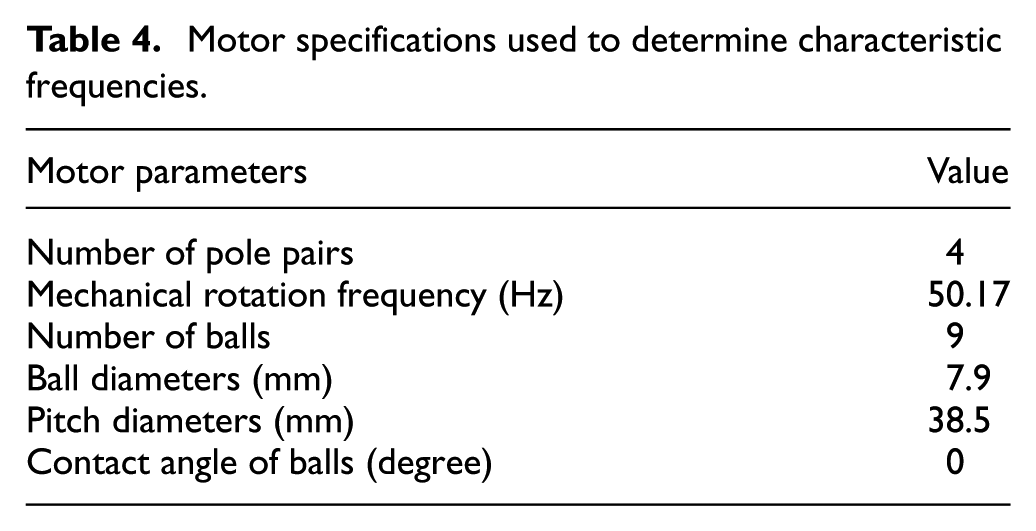
Figure 4 depicts the primary workflow of the proposed fault diagnosis method, with the implementation details described below. The input acquisition length is determined by common AC signal frequencies worldwide, which are typically 50 or 60 Hz. We set the capture duration to approximately 0.4 s, ensuring that at least 20 cycles of the signal are recorded, to capture a sufficient number of cycles. In this study, we primarily use a 0.4 s window. Although a longer CWT execution is necessary for extended durations, it results in a more accurate TFR. In addition, to minimize artifacts in the TFRs, we acquire a current signal that is twice the length required when performing CWT. After transformation, only the relevant portion of the CWT output is retained as the horizontal axis of the TFR. Based on the characteristic frequencies introduced in Subsection 2.1.2, the actual characteristic frequencies of the diagnosed motor are calculated. Taking the motor used in the benchmark dataset introduced by Jung et al.
44
as an example, the specifications are shown in Table 4. Then, the characteristic frequencies are calculated as:
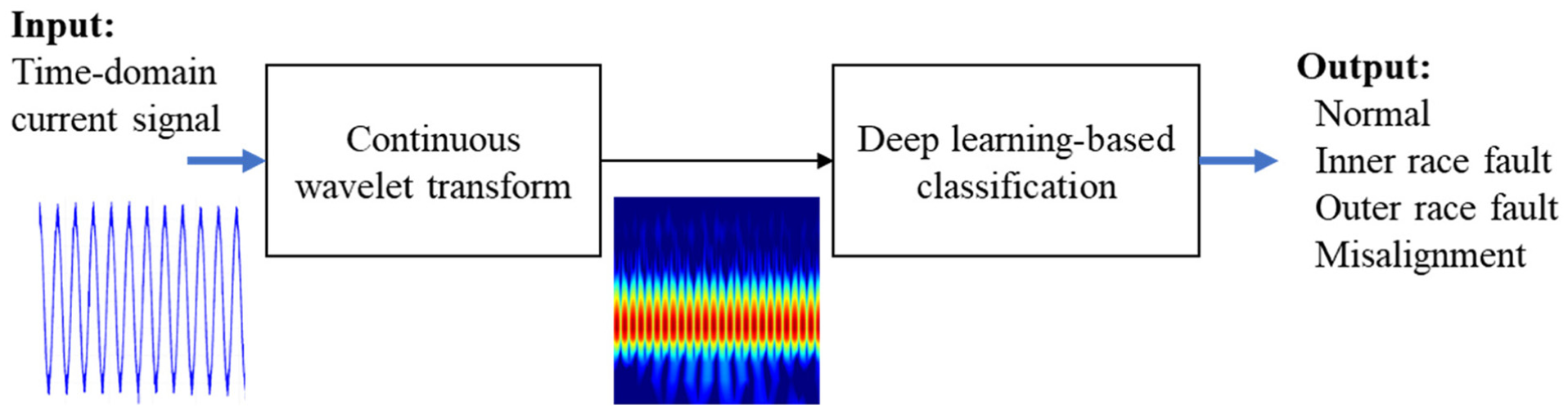
Workflow of the proposed current-based fault diagnosis method.
Motor specifications used to determine characteristic frequencies.
Primary experimental results and discussion
Benchmark dataset and data preparation
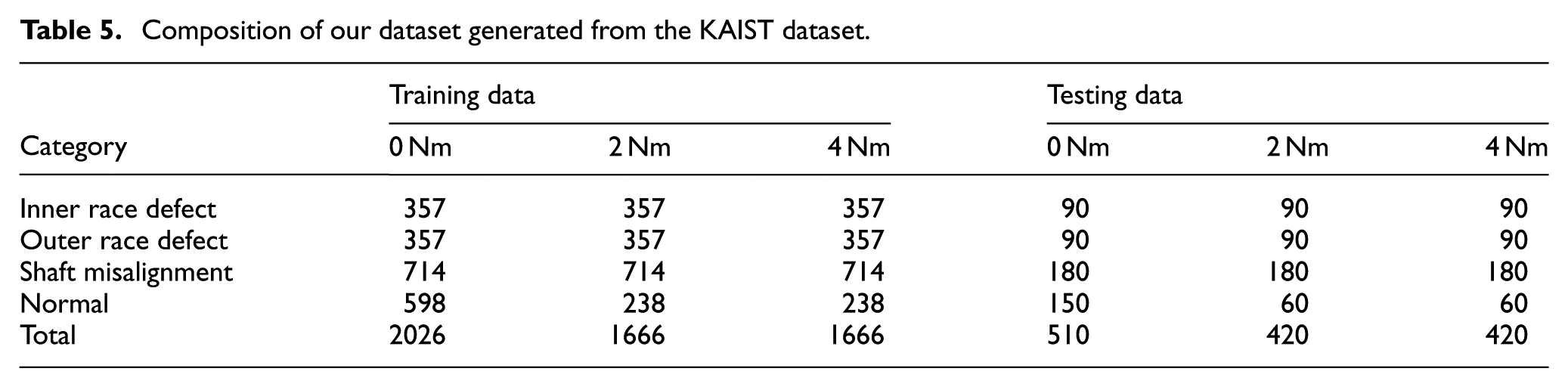
Jung et al. 44 introduced a comprehensive dataset for diagnosing faults in rotating machines under various operating conditions. This dataset, which was developed by researchers at the Korea Advanced Institute of Science and Technology (KAIST), is referred to as the KAIST dataset throughout this paper. This dataset encompasses typical fault conditions, including bearing faults (both inner and outer races) and shaft misalignments, which are commonly encountered in rotating machinery. It captures machine behaviors under three distinct load conditions (0, 2, and 4 Nm) at a constant speed of 3010 rpm, and bearing faults at varying speeds ranging from 680 to 2460 rpm. This variability enables an examination of the changes in fault characteristics with variations in load and speed, thereby more closely reflecting real-world operating conditions than datasets that are characterized by constant parameters. Moreover, the KAIST dataset includes vibration, acoustic, temperature, and motor current data, all of which were collected using standardized methods in accordance with ISO guidelines. Our experiments primarily utilized time-domain current data as a benchmark for comparison. As outlined in the dataset description, each sample was recorded for 60 s under faulty conditions and 120–300 s under normal conditions. To optimize the use of the available data, we designated the first four-fifths of samples as the training data and the rest as the testing data. We randomly extracted 0.4 s of current signal from the training data and converted it into its corresponding scalogram. By following this procedure, we created a dataset, as summarized in Table 5, for training and testing our proposed motor diagnostic method.
Composition of our dataset generated from the KAIST dataset.
Performance comparison and evaluation
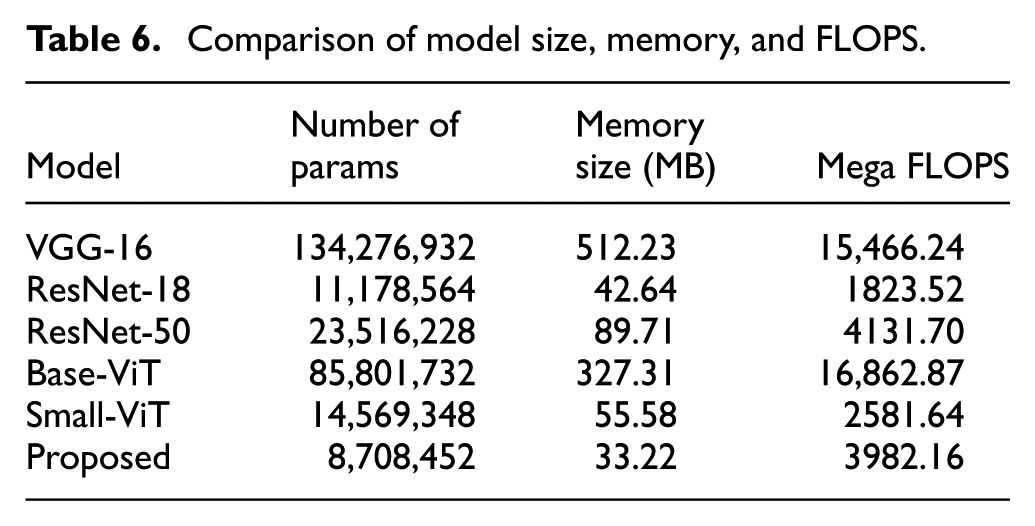
This study presents a lightweight deep-learning-based classification model that is designed to categorize inputs into normal and faulty classes, including misalignment, inner race faults, and outer race faults. We compared our approach with several classifiers that utilize classical architectures, such as VGG-16, 42 ResNet-18, 43 and ResNet-50, 43 as well as base and small Vision Transformers (ViTs). 45 In addition, we assessed the classification performance under three different operating conditions: no load, a 2, a 4 Nm load, and a varying load (switching between 0, 2, and 4 Nm). Before discussing the comparison results, the complexity parameters of all tested models are summarized in Table 6. Notably, the proposed model has a relatively small number of parameters, making it suitable for industrial applications in resource-constrained edge computing devices.
Comparison of model size, memory, and FLOPS.
Overview of comparative accuracy under different loading conditions
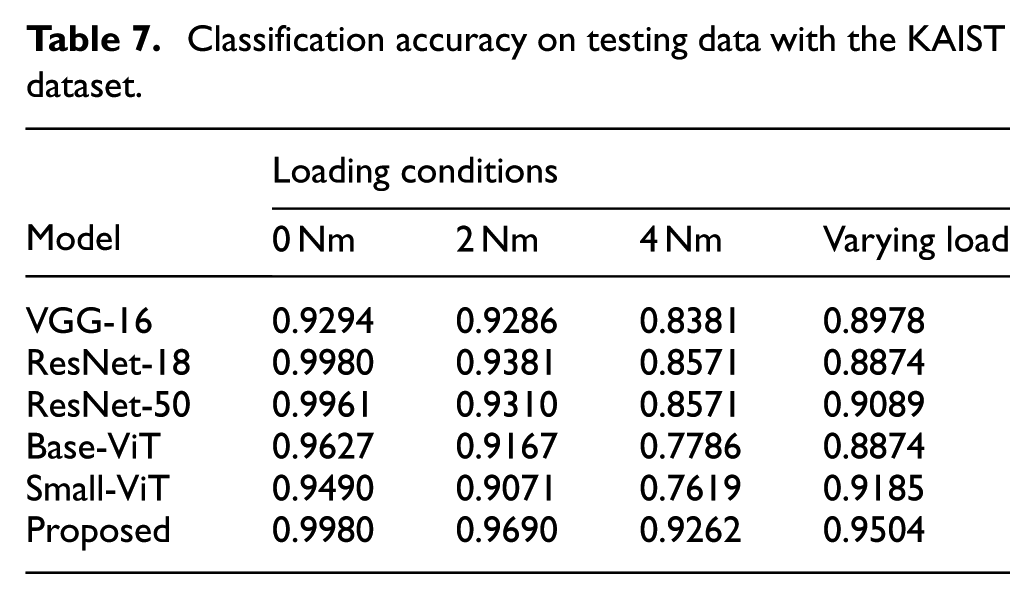
Table 7 displays the classification accuracy results for all tested models under various operating conditions. The accuracy was calculated using testing data that were not used during training. ResNet-18 and the proposed method outperformed the other models under the no-load condition, with our proposed method being the best overall across different operating conditions.
Classification accuracy on testing data with the KAIST dataset.
In-depth discussion of the proposed method
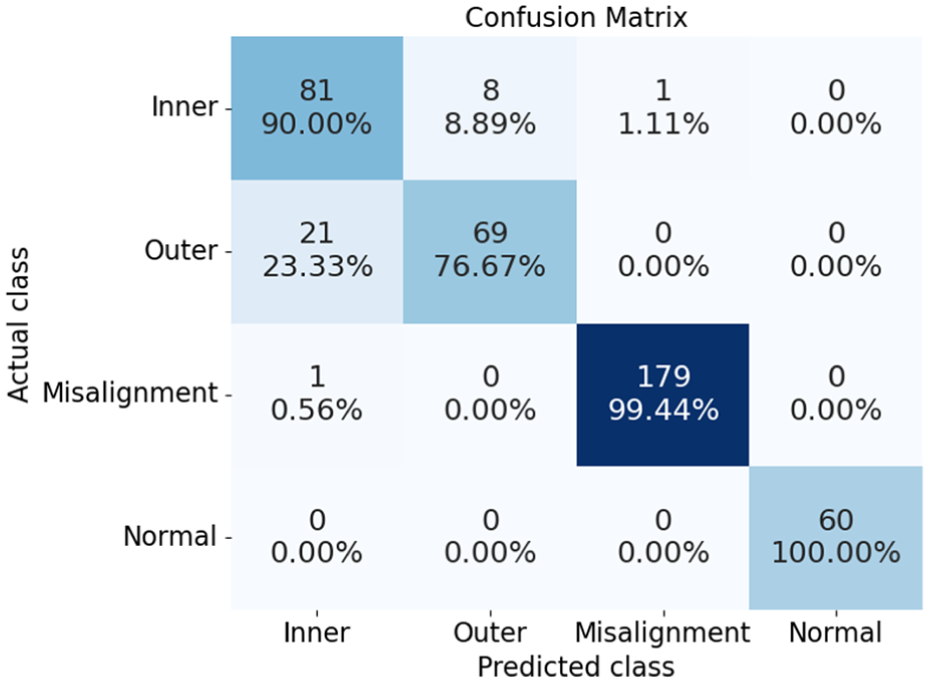
In this section, we analyze the performance of the proposed method using confusion matrices. These matrices reflect various loading conditions: 0, 2, 4 Nm, and varying loads. The results are shown in Figures 5 to 8. For the cases of 0 Nm presented in Figure 5, only one outer race fault sample was incorrectly classified as normal. The data in Figures 6 and 7 indicate that although some faulty categories were misclassified into other faulty classes, none were incorrectly classified as normal. Figure 8 shows the classification results under varying loads, indicating that only two samples from the faulty categories were incorrectly classified as normal. Based on this analysis, the proposed method rarely misclassified faulty cases as normal. That is, the method demonstrated very high accuracy in detecting faults.
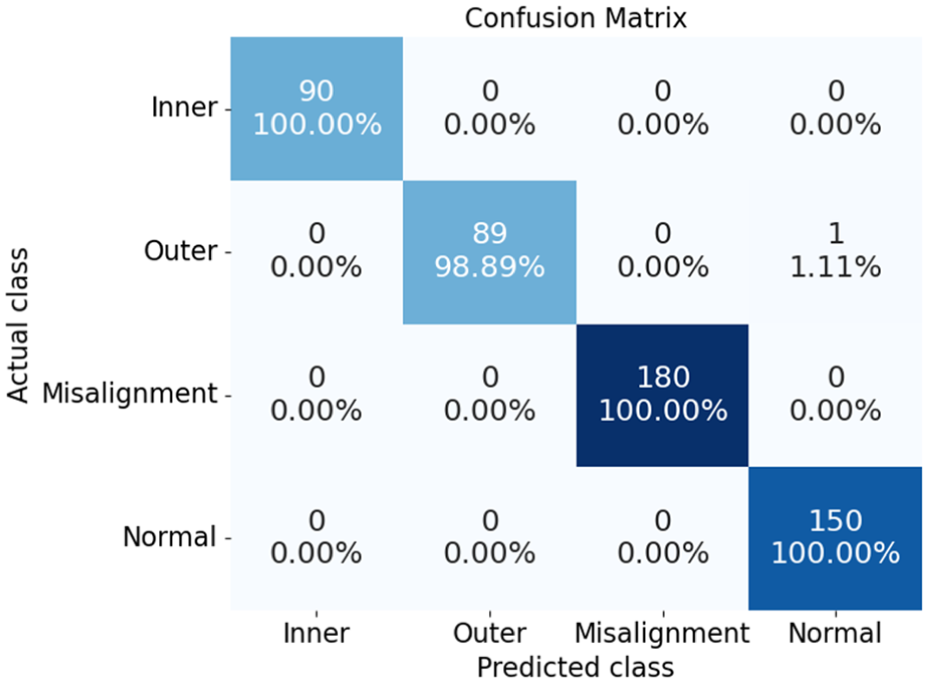
Confusion matrix of the proposed method under no-load conditions.
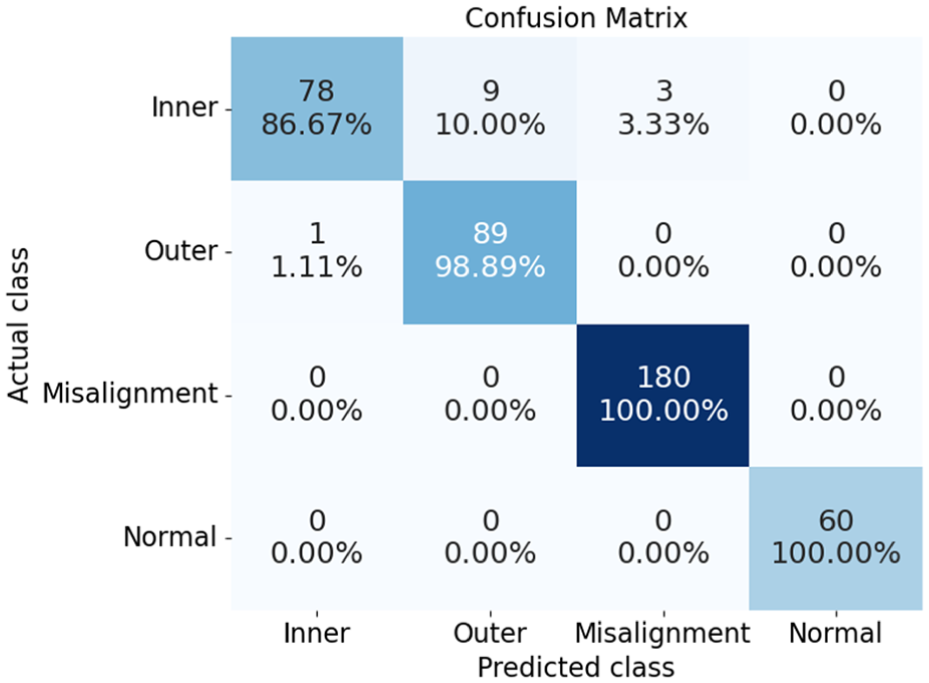
Confusion matrix of the proposed method with a 2 Nm load.
Confusion matrix of the proposed method with a 4 Nm load.
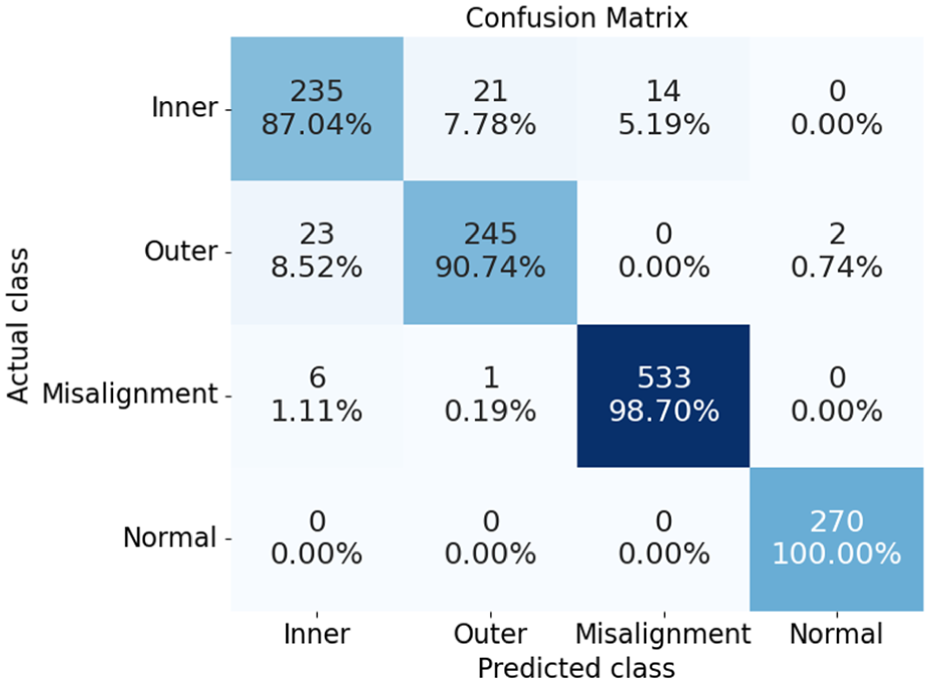
Confusion matrix of the proposed method with varying loads.
Binary classification for detecting anomalies
Based on the above results and discussion, the proposed method outperformed the other methods in classifying normal and three different faulty categories, achieving the highest accuracy in multiple classes. In quick-diagnosis scenarios, users are often more concerned with whether faulty conditions are mistaken for normal rather than a detailed categorization, which can lead to missed opportunities for further testing. Therefore, we converted the above test results into a binary classification task, distinguishing between faulty and normal samples, to evaluate the performance of the method. Table 8 presents the diagnostic results, including the common indices true positive (TP), true negative (TN), false positive (FP), and false negative (FN). No normal samples were misclassified as faulty under any operating conditions, indicating that the field equipment operated normally without unnecessary shutdowns for inspection. Under the no-load and varying-load conditions, only one or two faulty samples were incorrectly identified as normal; however, ongoing operation offers opportunities to detect these faults. This indicates that the proposed method exhibited an extremely low false-negative rate, making it practical for industrial applications.
Binary diagnosis results of the proposed method.
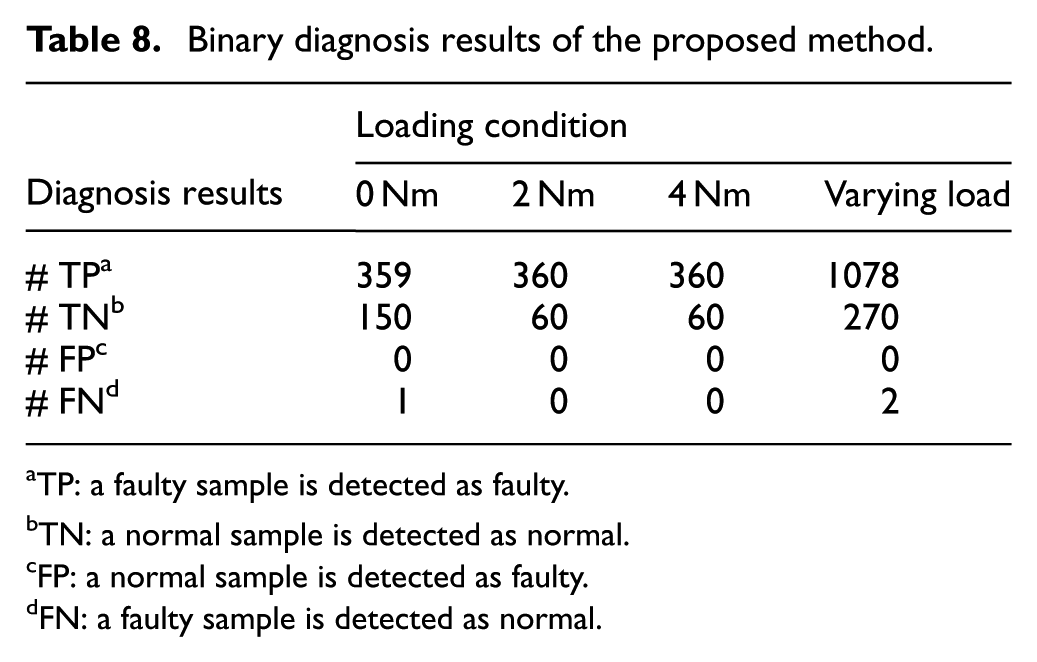
TP: a faulty sample is detected as faulty.
TN: a normal sample is detected as normal.
FP: a normal sample is detected as faulty.
FN: a faulty sample is detected as normal.
Additional experimental validation and comparative analysis
Experiments with the Paderborn dataset
The Paderborn Bearing Dataset, developed by the Chair of Design and Drive Technology at Paderborn University, provides a systematically designed benchmark for condition monitoring and fault diagnosis in electromechanical drive systems. 46 The dataset comprises 32 distinct bearing conditions using 6203-type deep-groove ball bearings. It includes 6 healthy bearings, 12 with artificially induced damages, and 14 with naturally developed damages obtained through accelerated lifetime testing to replicate realistic degradation processes. The measurements include both motor current signals (MCS) and vibration signals, synchronously sampled at 64 kHz, along with auxiliary parameters such as rotational speed, torque, radial load, and temperature.
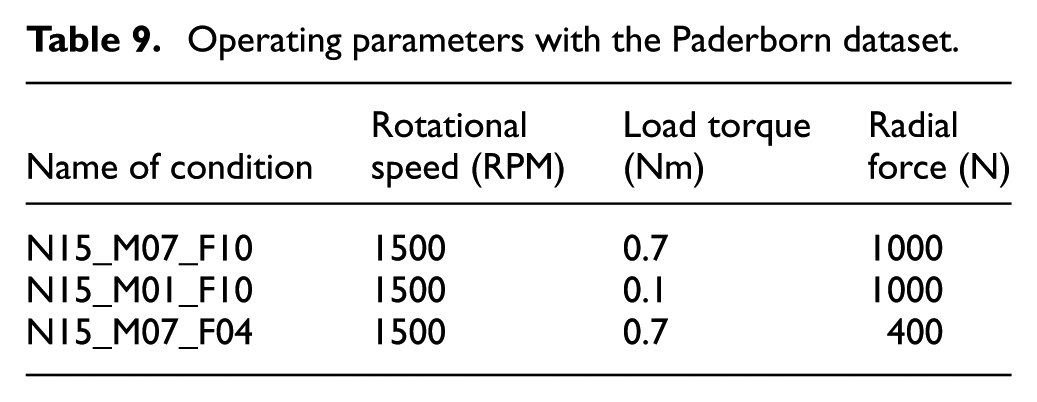
In this study, we focused exclusively on the motor current signals collected under identical rotational speed conditions (1500 rpm) to ensure consistent operating frequency for comparative analysis. Specifically, data recorded under three representative load settings, including N15_M07_F10, N15_M01_F10, and N15_M07_F04, were selected. As summarized in Table 9, three operating conditions were considered in this study. These conditions correspond to different combinations of load torque (0.1 or 0.7 Nm) and radial force (400 or 1000 N), with a rotational speed of 1500 rpm. Such configurations enable a controlled investigation of the sensitivity of motor current signals to varying mechanical loading conditions. Moreover, only naturally developed damages and healthy (normal) bearing data were used for this validation. Artificially induced defects were excluded to preserve the physical realism of fault progression and to better reflect the signal characteristics encountered in real-world industrial applications.
Operating parameters with the Paderborn dataset.
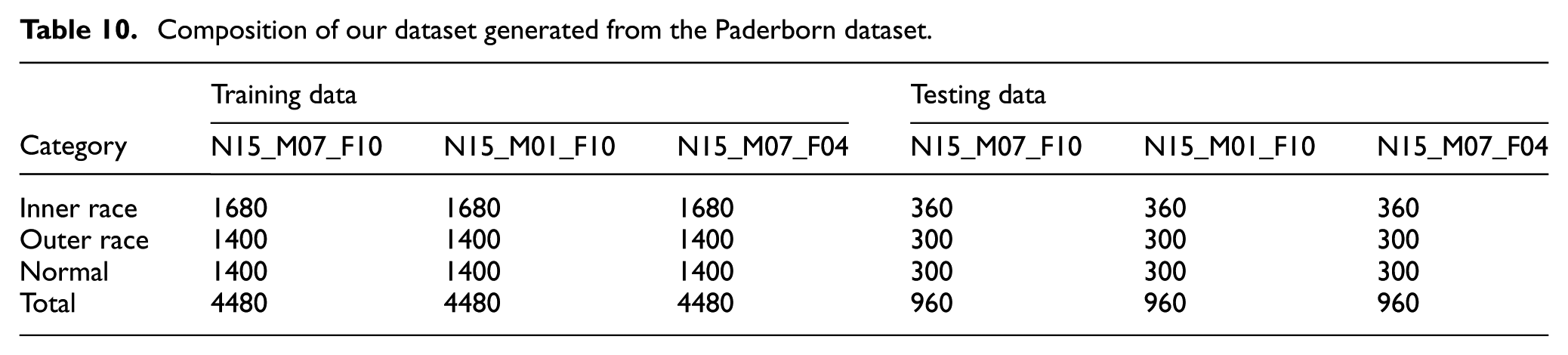
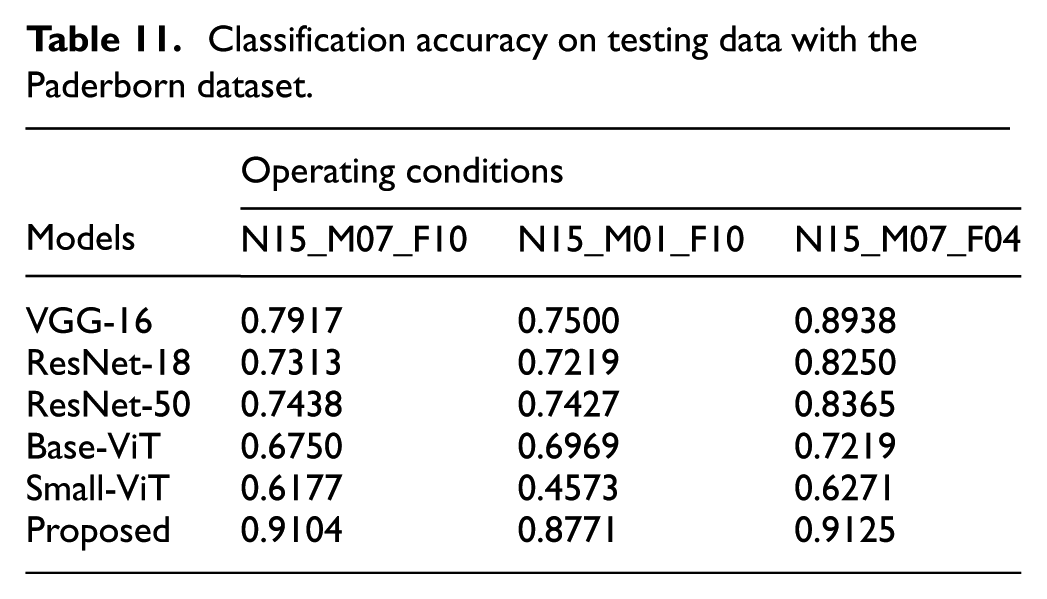
Similar to Table 5 of Subsection 4.1, we summarized our training and testing data in Table 10. Table 11 presents the classification accuracies obtained under three distinct operating conditions using the Paderborn dataset. The proposed model consistently outperformed all benchmark architectures, including both CNN- and transformer-based models, across three testing scenarios. In particular, it achieved accuracies exceeding 0.90 under the N15_M07_F10 and N15_M07_F04 operating conditions, demonstrating its superior capability to extract discriminative features from current signal data. These results further confirmed the robustness and generalization ability of the proposed approach for fault diagnosis under varying motor operating environments.
Composition of our dataset generated from the Paderborn dataset.
Classification accuracy on testing data with the Paderborn dataset.
Overall comparison with state-of-the-art models
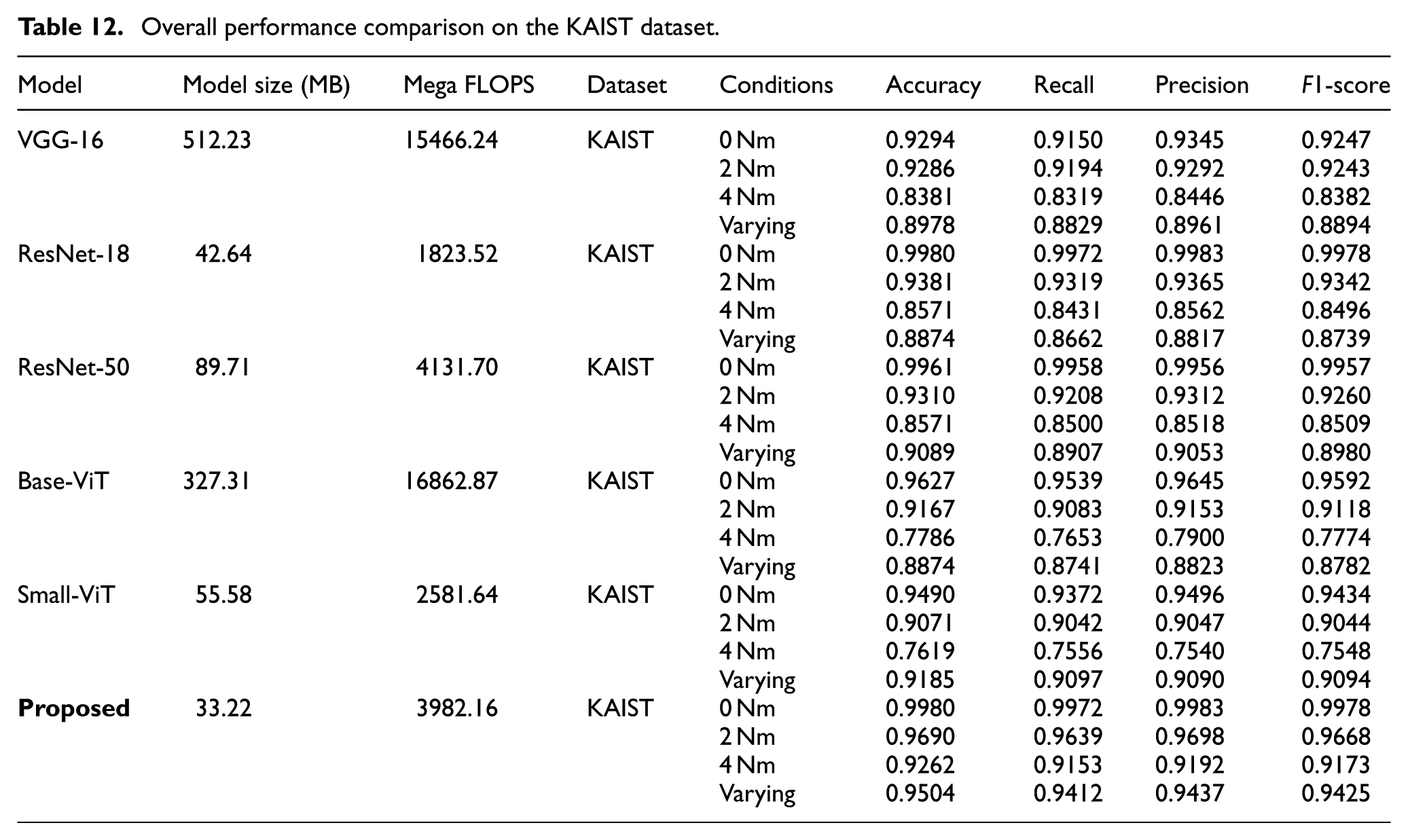
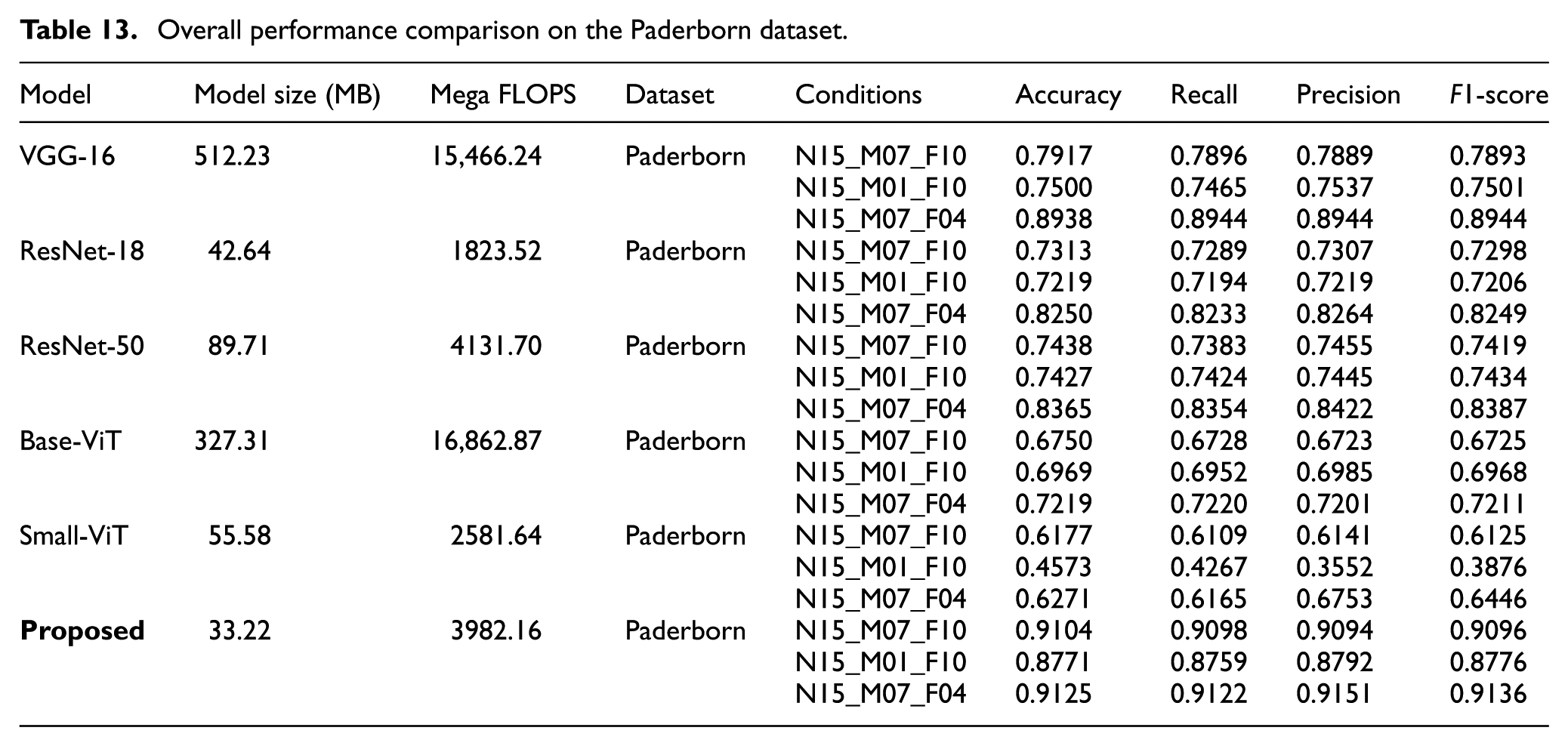
To further demonstrate the effectiveness of the proposed framework, a comprehensive comparison with several representative deep learning architectures was conducted. In addition to classification accuracy, widely used evaluation metrics, including precision, recall, and F1-score, were considered, and model complexity indicators, such as model size and computational cost (measured in Mega FLOPS), were included to assess the practicality of deployment in industrial environments. Table 12 presents the overall performance comparison on the KAIST dataset under different loading conditions (0, 2, 4 Nm, and varying loads). The proposed model consistently achieved superior diagnostic performance, particularly under the varying-load condition, where it obtained the highest accuracy of 0.9504 with recall, precision, and F1-score values of 0.9412, 0.9437, and 0.9425, respectively. Similarly, Table 13 presents the results for the Paderborn dataset under three operating conditions (N15_M07_F10, N15_M01_F10, and N15_M07_F04), in which the proposed model again achieved the best diagnostic performance, with accuracies of 0.9104, 0.8771, and 0.9125, respectively. These results indicate that the proposed framework achieves a favorable balance between diagnostic accuracy and computational complexity, while the consistent performance improvements across two independent benchmark datasets further confirm its robustness and generalization capability. Owing to its lightweight architecture, the proposed model is well-suited for deployment on resource-constrained edge devices for practical motor condition monitoring in industrial environments.
Overall performance comparison on the KAIST dataset.
Overall performance comparison on the Paderborn dataset.
Edge deployment and inference performance
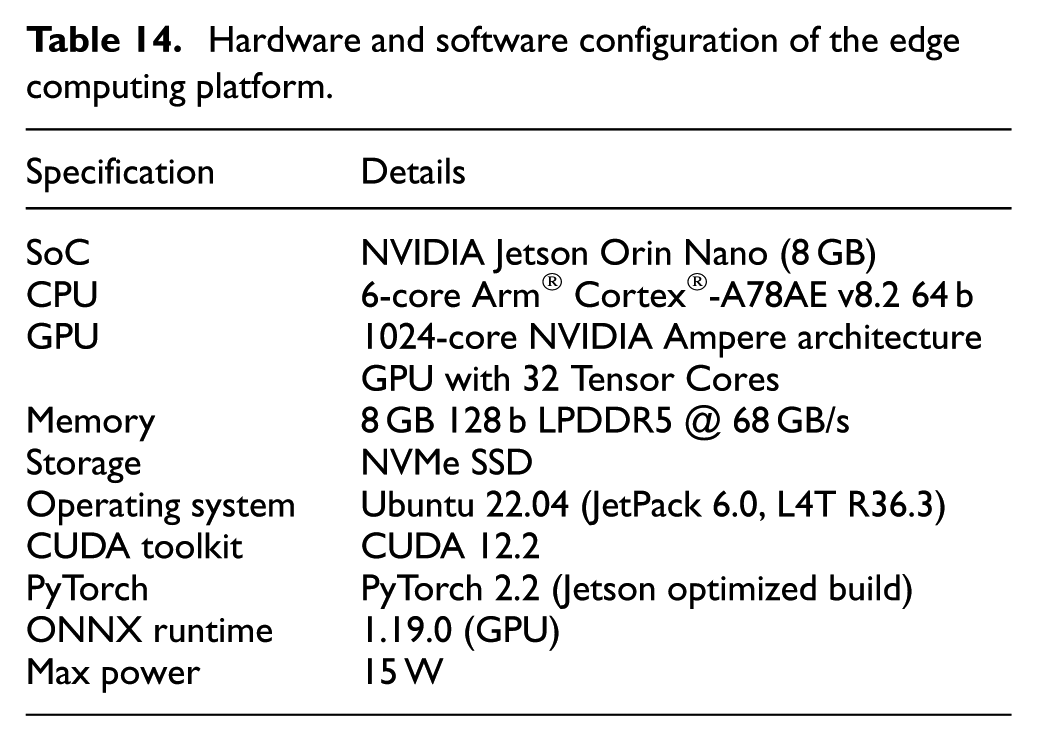
To further validate the practicality of the proposed lightweight model for edge computing applications, inference performance was evaluated on an embedded platform. The experiments were conducted on an NVIDIA Jetson Orin Nano device equipped with an Arm Cortex-A78AE CPU and an NVIDIA Ampere GPU. The detailed configuration of the experimental platform is summarized in Table 14.
Hardware and software configuration of the edge computing platform.
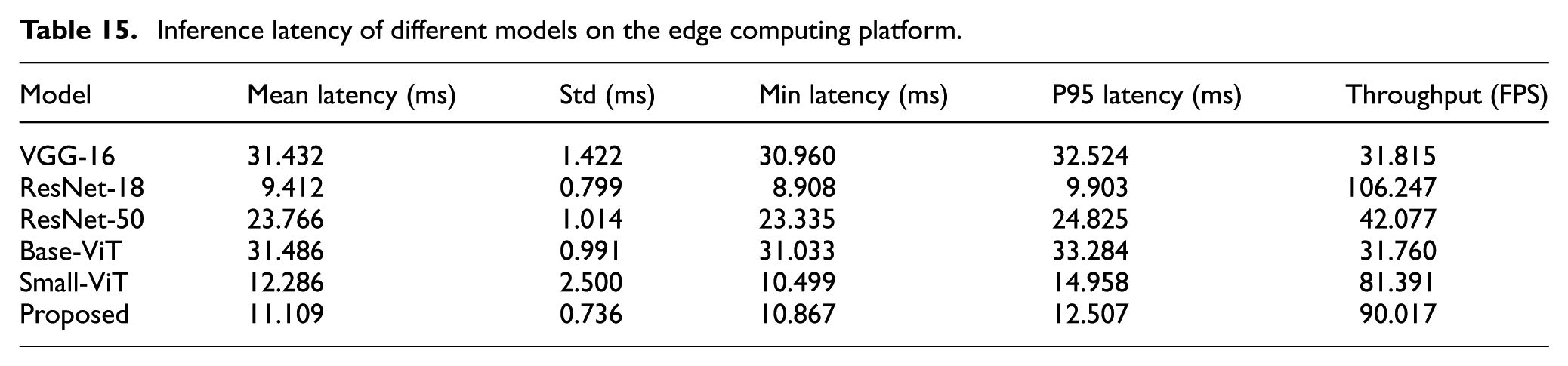
For inference evaluation, all trained models were exported to ONNX format and executed using ONNX Runtime with GPU acceleration. Each model was tested using a batch size of one to reflect real-time deployment scenarios typically encountered in industrial monitoring systems. The input scalograms were resized to 224 × 224 pixels before being fed into the network. To obtain stable latency measurements, inference performance was evaluated over 100 runs following 10 warm-up iterations. The results summarized in Table 15 indicate that ResNet-18 achieved the lowest raw inference latency of 9.412 ms (106.247 FPS), while the proposed model achieved 11.109 ms (90.017 FPS). Although it is slightly slower than ResNet-18, the proposed model offers a better balance between diagnostic accuracy and computational efficiency. It requires fewer parameters and a smaller memory footprint while still achieving superior diagnostic accuracy. In contrast, heavier architectures such as VGG-16 and Base-ViT exhibit significantly higher inference latency (over 31 ms) without offering accuracy improvements that justify their computational overhead. These results confirm that the proposed framework effectively balances diagnostic performance and computational efficiency, making it well-suited for deployment on resource-constrained edge devices for real-time motor condition monitoring in industrial environments.
Inference latency of different models on the edge computing platform.
Conclusion
This study presented a motor fault diagnosis method based on AC current signal measurement and time-frequency feature analysis. The proposed approach classified motor health conditions into four categories: normal, inner race fault, outer race fault, and misalignment. After acquiring the current signal, a CWT was applied to generate a TFR or scalogram, with a recommended signal length of approximately 0.4 s. A deep-learning model was then developed, consisting of two sub-structures: feature extraction with an attention mechanism and anomaly classification, tailored for diagnosing AC motor faults. The proposed method was validated using two benchmark datasets involving induction motors and permanent-magnet synchronous motors, which represent the most prevalent AC motor types in industrial applications. Experimental results demonstrated that the proposed approach achieved superior diagnostic accuracy and robustness compared with existing architectures, while maintaining a lightweight structure suitable for real-time deployment on edge devices in industrial environments. Overall, the proposed method is effective in detecting both bearing and operational faults across different AC motor types.
In practical industrial environments, multiple faults may coexist, leading to superimposed characteristic frequency components in the time-frequency domain. Although the adopted CWT-based representation can capture such spectral superpositions, the current single-label learning paradigm does not explicitly model multi-fault coexistence and is likely to assign a sample to the most dominant class. Extending the framework to a multi-label formulation, therefore, represents a natural direction for compound fault diagnosis. In addition, the present model operates under a closed-set assumption and may assign previously unseen fault types to predefined categories. Incorporating open-set recognition or anomaly-detection mechanisms would improve robustness against unknown fault patterns. Furthermore, future work will explore extending the framework to direct current (DC) motor fault diagnosis and evaluating its applicability in broader industrial environments. These efforts aim to enhance diagnostic robustness and expand the practical applicability of the proposed framework to more complex real-world systems.
Footnotes
Acknowledgements
The authors thank Ms. Gloria Chang of ekoXense Co., Ltd. (Taiwan) for her dedicated assistance throughout this work.
Ethical considerations
There are no human participants in this article and informed consent is not required.
Consent to participate
Not applicable. This study did not involve human participants or animals.
Consent for publication
Not applicable. This manuscript does not contain any individual person’s data in any form.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Science and Technology Council (NSTC), Taiwan, under Grant No. NSTC-114-2221-E-008-075-MY2.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.