
Abstract
This paper proposes a novel intelligent control framework for precise speed regulation of DC motors using a two-degree-of-freedom proportional–integral–derivative (2-DOF PID) controller whose six parameters are optimally tuned via the animated oat optimization (AOO) algorithm. AOO is a nature-inspired metaheuristic derived from the hygroscopic seed dispersal behavior of Avena sterilis L., offering a hybrid global-local search strategy that balances exploration and exploitation through mechanisms such as eccentric rotation, projectile jumps, and Lévy flights. The controller parameters are optimized within bounded physical limits using a composite cost function that integrates Integral Absolute Error (IAE) and normalized overshoot percentage. Comparative simulations are conducted against four recent metaheuristics, catch fish optimization algorithm (CFOA), greater cane rat algorithm (GCRA), RIME optimization, and particle swarm optimization (PSO), under identical settings (100 iterations, 30 agents). Statistical analysis over 25 independent runs reveals that the AOO algorithm achieves the best average cost value (65.2185) with the lowest standard deviation (1.2091), indicating high convergence stability. In time-domain analysis, the AOO-based 2-DOF PID controller exhibits the shortest rise time (0.9217 s), fastest settling time (1.4143 s), lowest overshoot (0.5688%), and negligible steady-state error (∼10−13), outperforming all benchmark algorithms. The controller’s robustness and adaptability are further validated through simulations under random reference inputs, multistep transitions, and external disturbances with measurement noise. Experimental validation using a real-time hardware-in-the-loop setup, including a Pololu 12 V DC geared motor, IBT-2 H-bridge driver, Arduino Uno, and MATLAB/Simulink interface, confirms the simulation results, demonstrating fast, stable, and accurate speed tracking across diverse reference profiles. These findings confirm that the AOO-based 2-DOF PID controller offers a highly effective, reliable, and practically deployable solution for high-performance motor control under dynamic and uncertain operating conditions.
Keywords
Introduction
Proportional-integral-derivative (PID) controllers have been widely used in industrial control systems for many years due to their structural simplicity, intuitive settings, and successful performance in a diverse range of applications. 1 However, despite their popularity, traditional PID controllers struggle to cope with challenges such as changing loads over time, external disturbances, or the need for fast yet accurate reference tracking. These failures, which stem from the interdependence of proportional, integral, and derivative actions within a single-loop feedback structure, prevent the controller from independently adjusting its transient and steady-state responses. As a result, traditional PID controllers are often unable to meet the high-performance demands of DC motor speed control under dynamic conditions.2–4 To overcome the limitations of classic PID structures, a two-degree-of-freedom PID controller (2-DOF PID) is developed as an extended structure that increases design flexibility. The 2-DOF PID structure separates reference tracking and disturbance rejection responses with weight parameters. The reference input is modulated by the setpoint weight coefficients applied to the proportional and derivative paths, enabling the transient response to be independently shaped without compromising steady-state regulation. This reduces excessive oscillations caused by sudden setpoint changes while maintaining aggressive corrective measures against external disturbances.5–7 Despite these advantages, the effective implementation of 2-DOF PID controllers largely depends on the precise adjustment of numerous interrelated parameters. As system dynamics become more nonlinear or time-varying, this requirement becomes increasingly complex.8–10
The effectiveness of a 2-DOF PID controller depends on the correct selection of its six basic parameters: proportional, integral, and derivative gains, as well as setpoint weighting and derivative filtering coefficients. Unlike traditional PID tuning, the tuning of 2-DOF PID controllers offers an interconnected and higher-dimensional search space.11–13 In real-world systems, manual or empirical tuning methods often fail to provide satisfactory results, especially in nonlinear systems, under varying loads, or in the presence of external disturbances. In addition, analytical tuning methods consider systems as linear and time-invariant models, and they do not investigate non-idealities in practical control systems. Hence, advanced optimization-based tuning approaches that are capable of effective search in high-dimensional parameter spaces and handle time-varying system conditions are employed.13–15
To address the limitations of traditional manual and analytical tuning methods, metaheuristic optimization techniques are established as promising tools for controller parameter tuning in recent years. These methods allow the use of flexible and non-derivative search strategies that are appropriate for high-dimensional, nonlinear, and multi-modal optimization problems and are inspired by natural, biological, or physical processes. Metaheuristics such as particle swarm optimization (PSO), 16 honey badger optimization algorithm (HBOA), 17 and dragonfly algorithm (DA) 18 have shown promising results in several control engineering problems. By stochastically searching the parameter space using collective intelligence or adaptive mechanisms, these techniques are capable of converging to superior parameter sets that can produce enhanced performance and robustness in comparison with classical methods. Nevertheless, although they have achieved success, commonly adopted metaheuristics frequently face the challenges of early convergence, high sensitivity to control parameters, and insufficient exploration in complicated environments. 19
Metaheuristic algorithms are capable of providing a general framework to optimize controllers, but many established methods experience difficulty in balancing exploration and exploitation.20–22 Classical algorithms tend to prematurely converge and become trapped in local optima, especially when working on narrow global basins or deceptive domains. Therefore, these algorithms may show unstable performance for different problem instances or require a large amount of parameter tuning. Consequently, their transferability to real-time or adaptive control applications is compromised. 23 Hence, novel optimization techniques are still required to provide more stable convergence characteristics, parameter insensitivity, and strong global search ability in tuning complex advanced controller structures.
Although numerous research studies have been carried out for PID-based motor control, reviews show that classical tuning methods cannot effectively handle the high-dimensional and nonlinear structure of new types of controllers. Manual tuning approaches are usually time-consuming with limited performance in real-time systems, and do not generalize well under different load dynamics or load changes and disturbances. In addition, the real-time 2-DOF PID tuning problem has not been adequately addressed in the literature, indicating that a flexible, noise-resilient, and globally convergent optimization method for real-time 2-DOF PID tuning still does not exist. This requires the development of a new optimization technique capable of simultaneously tuning all six coupled parameters of the 2-DOF PID controller in a reliable manner, while ensuring excellent tracking performance, fast convergence rate, and strong robustness against unmodeled dynamics and measurement noise.
In this paper, a new and intelligent control method for high-precision speed control of a DC motor is proposed by integrating the animated oat optimization (AOO) technique with a 2-DOF PID controller. The 2-DOF PID design, which is given in more detail in the following, can be seen as a multi-dimensional tuning problem, since it offers a unique opportunity to separately design each side of the controller through a total of six linked parameters. To this end, our present strategy utilizes the AOO technique, a new metaheuristic algorithm that imitates the hygroscopic spreading behavior of Avena sterilis L (ASL) seeds. This algorithm mimics potential energy-based fluctuations and biologically inspired energy-based jumping processes to move from one solution to another solution in the parameter space, and it provides an adaptive balance between global and local searching in the parameter space.
In the proposed methodology, AOO optimizes all six parameters of the controller at once within the given practical limits by minimizing a weighted sum of two metrics in the form of the product of the Integral Absolute Error (IAE) and the fraction of the normalized overshoot. Significant simulation results prove that the AOO-based controller is superior to four state-of-the-art metaheuristics in terms of all important performance indices. The AOO-based controller shows the minimum average cost (65.2185), the fastest rise time (0.9217 s), the smallest settling time (1.4143 s), and the least overshoot (0.5688%) among all methods under test. Moreover, its robustness and flexibility are also tested with multistep and stochastic references, as well as sensor noise and perturbations.
To verify real-world applicability, real-time implementation is carried out on a 12 V geared DC motor with Arduino hardware and MATLAB/Simulink interfacing. The experimental results are consistent with the simulation results, demonstrating good speed tracking ability, fast transient response, and strong disturbance rejection under practical environments. These results demonstrate that the AOO-based 2-DOF PID controller is an effective solution for intelligent motor control in dynamic and uncertain environments and also possesses high computational efficiency and robustness.
Animated oat optimization algorithm
The AOO is a metaheuristic algorithm among nature-based algorithms and is biologically inspired by the seed dispersal of the ASL plant. ASL shows distinctive hygroscopic motions due to deformation of the primary barley in response to moisture changes. Such movements contribute to the transportation of seeds across different landscapes and follow stochastic and energy-based dispersal patterns. These behaviors are exploited as the exploration and exploitation stages in the proposed optimization scheme.
Initialization phase
The algorithm begins by initializing a population of
Each variable

where
Parameter calculation
Inspired by the physical traits of animated oat seeds, algorithm parameters are dynamically adjusted during execution. These parameters include mass

where
Exploration phase
The global search ability of AOO is modeled after wind-, water-, and animal-driven seed dispersion, introducing randomness in positional updates as equations (4) and (5):

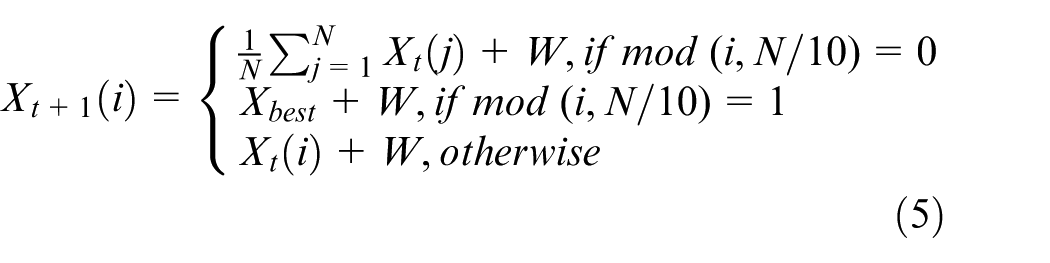
This approach allows seeds to randomly scatter in a large region of the search space, thereby enhancing diversity.
Exploitation phase
When no obstacles are encountered, seed rolling induced by hygroscopic tension is modeled using eccentric rotation and Levy flights as equations (6)–(9):




This mechanism promotes local refinements in promising regions of the solution space, inspired by anisotropic swelling and torque-induced motion in oat seeds. When physical barriers are simulated, the stored energy in the seed’s awn is assumed to be released, resulting in an ejection behavior modeled as projectile motion as equations (10)–(13):




This mechanism enhances the algorithm’s capacity to escape local optima by emulating abrupt directional jumps.
Algorithmic characteristics
Each iteration involves probabilistic selection between exploration and two types of exploitation operators as shown in the flowchart of AOO in Figure 1. The design ensures dynamic adaptation between wide-range search and focused exploitation. The overall time complexity is given by equation (14):

where

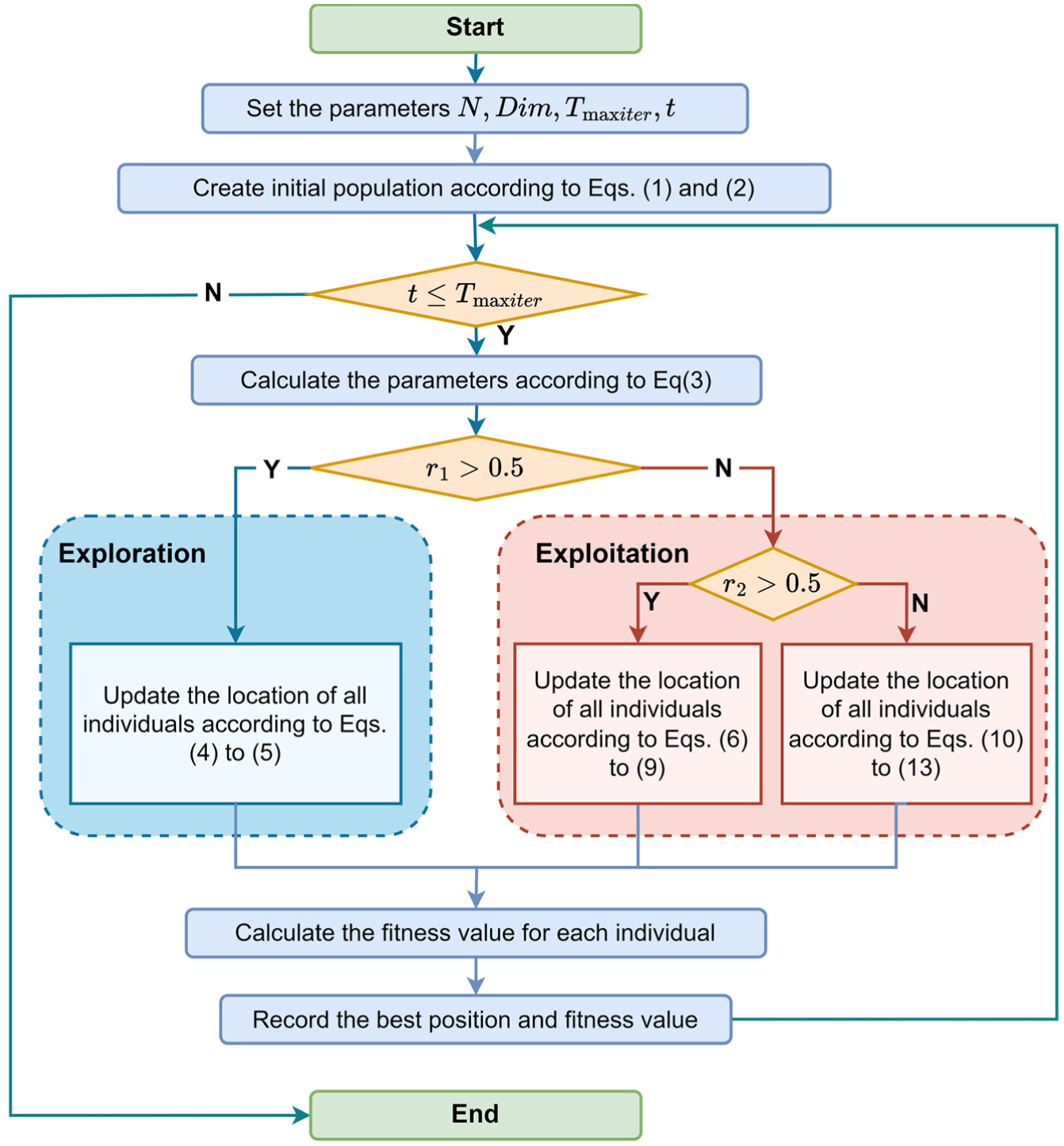
AOO flowchart.
Due to its reliance on biologically grounded motion dynamics and its hybrid treatment of search phases, AOO is distinguished by its robustness, search efficiency, and capacity to maintain solution diversity over time.
Relation to existing metaheuristic search strategies
In recent years, a variety of nature-inspired metaheuristic algorithms have incorporated stochastic motion patterns to enhance search diversity and avoid premature convergence. Among these mechanisms, Lévy-flight-based perturbations have been employed in different optimization frameworks as an auxiliary strategy to improve exploration capability. Nevertheless, the presence of such stochastic components does not, by itself, define the core search philosophy or structural characteristics of an optimization algorithm.
The AOO is inspired by the hygroscopic motion and energy accumulation and release behavior observed in ASL seeds. Instead of approaches that metaphorically model reproduction, replacement, or elimination of individuals, AOO captures physical dynamics of motion, such as long-range dispersal, eccentric rolling induced by anisotropic swelling, and sudden projectile-like motion due to the release of stored elastic energy. These operators control the exploration-exploitation balance at the search level during the optimization process.
Lévy-flight perturbations used in AOO are limited to the role of an optional refinement mechanism to improve local search ability and to escape from poor local solutions within the AOO framework. The prevailing search mode is steered by energy-based mechanical motion operators, a feature that sets AOO apart from other nature-inspired algorithms, where Lévy flights represent the primary search engine. Accordingly, this allows proper and stable convergence, which are favorable properties for constrained high-dimensional problems such as multi-parameter controller tuning.
Mathematical modeling of DC motor
In modeling the dynamic behavior of a DC motor, the magnetic field remains constant throughout the operation. Under this condition, which is valid for systems using permanent magnets or externally excited field windings, the torque produced by the motor is linearly dependent on the armature current.24–26 The torque–current relationship is expressed as equation (16):

where

Here,

where

By applying the Laplace transform, assuming zero initial conditions, the system is converted into the frequency domain as equations (20) and (21):


Eliminating

This second-order transfer function characterizes the dynamic input-output behavior of an armature-controlled DC motor, serving as the basis for control design and analysis in speed regulation applications. The MATLAB/Simulink parameter estimation toolbox estimates DC motor parameters. The values obtained are shown in Table 1.
DC motor parameters.
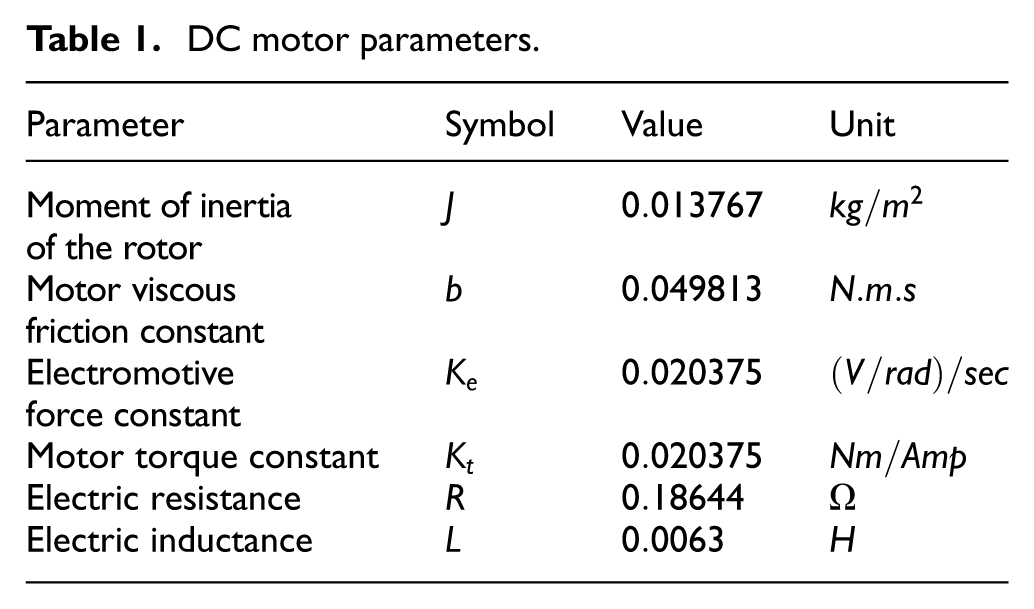
By substituting the obtained parameters into equation (22), the second-order transfer function representing the DC motor shown in equation (23) is obtained.

A novel control strategy for DC motor speed regulation
In this paper, an innovative approach using a 2-DOF PID controller is developed for the speed control of a DC motor, where the parameters of the PID controller are optimally tuned by the AOO algorithm. The 2-DOF PID design provides more degrees of freedom to enhance the performance of the system when tracking the reference and rejecting disturbances in comparison with the traditional PID controller. To improve the dynamic behavior and robustness with respect to parameter uncertainties, the control gains, including the setpoint weighting factors, are systematically optimized using AOO. Through this integration, the proposed scheme further reduces transient responses such as overshoot and settling time, while achieving lower steady-state error and improved accommodation of load variations compared with traditional tuning methods.
2-DOF PID controller for DC motor speed control system
In the feedforward/feedback control structure, a 2-DOF PID controller is employed, as depicted in Figure 2. In the 2-DOF PID structure, the classical PID equation is modified with two extra weights, enabling the tuning of the setpoint response separately from disturbance rejection. Such flexibility is essential in time-varying processes with fast reference tracking and disturbance suppression.7,27
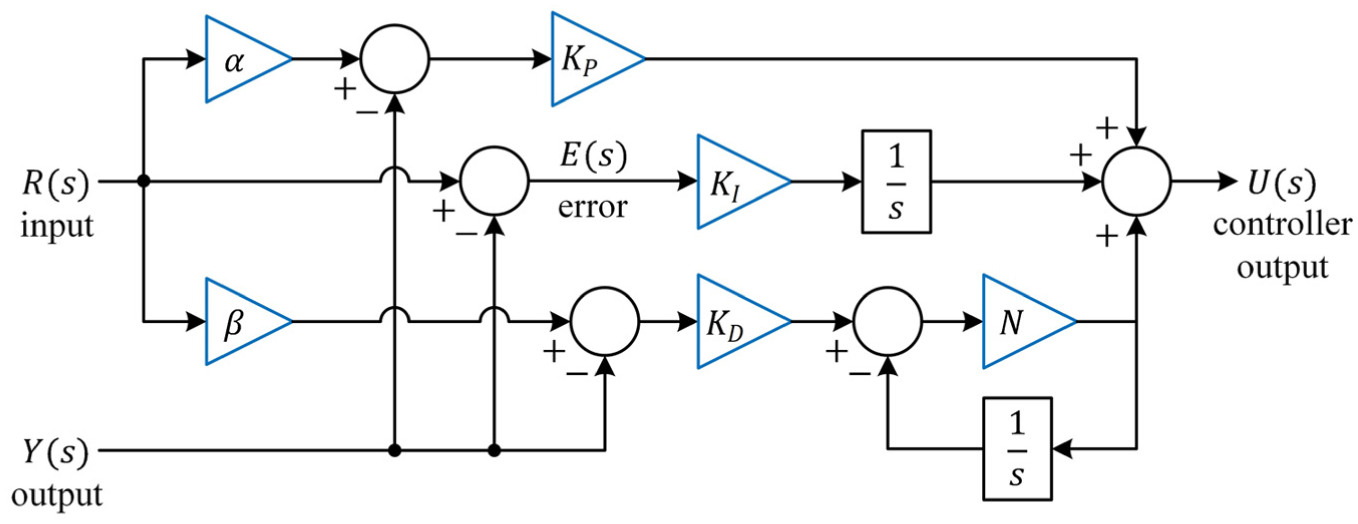
Control architecture of the 2-DOF PID regulator.
The mathematical formulation of the 2-DOF PID controller used in this study is given by equation (24):
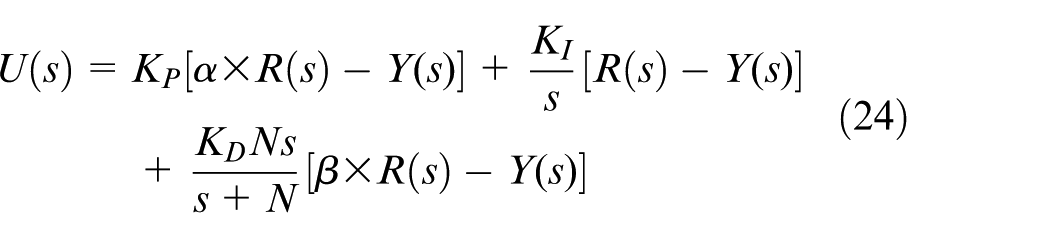
where
In this configuration, the proportional and derivative terms are applied not directly to the error signal but to weighted differences between the reference and output signals, enhancing flexibility. Specifically, the
The derivative term includes a first-order low-pass filter implemented through the transfer function
All six parameters
Developed cost function
In the optimization process of the proposed AOO-based 2-DOF PID controller, a composite cost function is defined to guide the parameter tuning performed by the AOO algorithm. The simulation time is set to

To incorporate both transient and steady-state characteristics into the optimization process, an adaptive cost function

In this formulation,
The optimization process is constrained within predetermined parameter bounds to ensure practical and physically realizable controller settings. These bounds are given in Table 2, covering all six tunable parameters of the controller:
Bounds of 2-DOF PID controller.
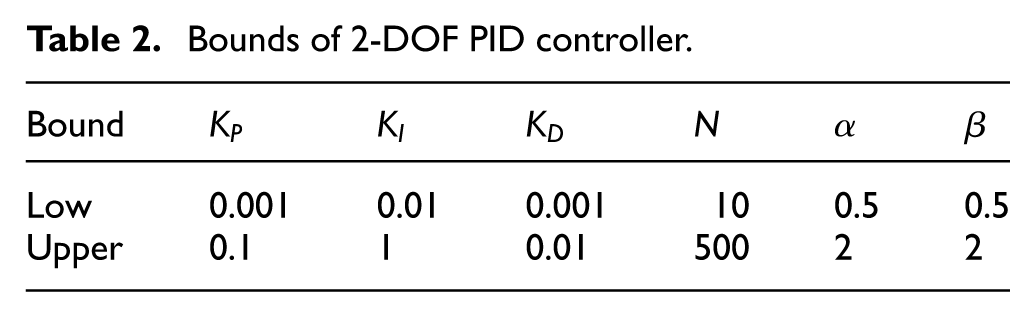
The minimum and maximum values of the proportional and integral gains are chosen to avoid excessive control effort, actuator saturation, and instability, while at the same time providing sufficient authority to accurately regulate the speed. The derivative gain is intentionally limited to a small range to prevent amplification of measurement noise, which is particularly important for real-time motor control. The derivative filter coefficient is bounded to satisfy high-frequency noise attenuation and transient response requirements. The setpoint weighting parameters α and β are restricted to ranges that are often used in practice for 2-DOF PID controllers, so that the reference tracking and disturbance rejection behavior may be shaped independently without causing aggressive transient behavior.
These bounds guarantee stability, implementability, and hardware compatibility of the controller parameters while allowing sufficient flexibility for the search process. By combining this bounded optimization scheme with the adaptive cost function, the proposed approach ensures that the controller is not only fast and accurate but also robust under real-world operating limitations.
It is worth mentioning that the proposed AOO-based tuning framework functions as an offline optimization method. Algorithmic evolution is characterized by iteration-dependent parameters and switching between exploration and exploitation operators to control the optimization trajectory, as opposed to modifying controller gains during real-time operation. This separation distinguishes the proposed method from online or adaptive parameter tuning schemes and guarantees physically implementable controller parameters for practical applications.
Utilization of the AOO algorithm in the control of DC motor speed
Six controller parameters are adaptively adjusted within predefined boundaries by the AOO algorithm as shown in Figure 3. The integration of AOO into the controller’s parameter detection enables significant improvements in speed-tracking accuracy, overshoot reduction, and robustness under practical operating conditions.
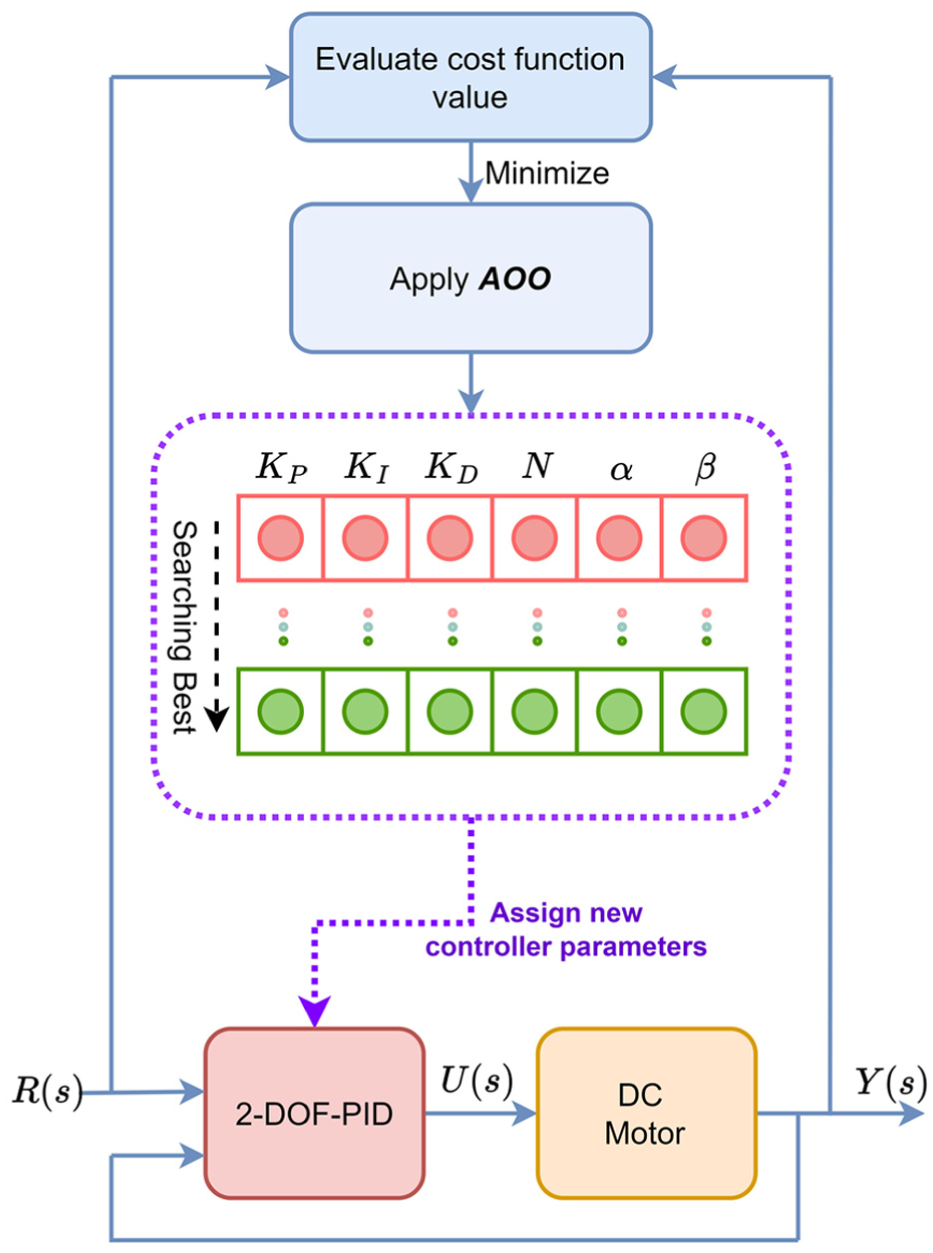
Block diagram of the AOO-based optimization framework for tuning 2-DOF PID controller parameters in DC motor control.
Simulation and experimental results
Metaheuristic algorithms employed for performance comparison
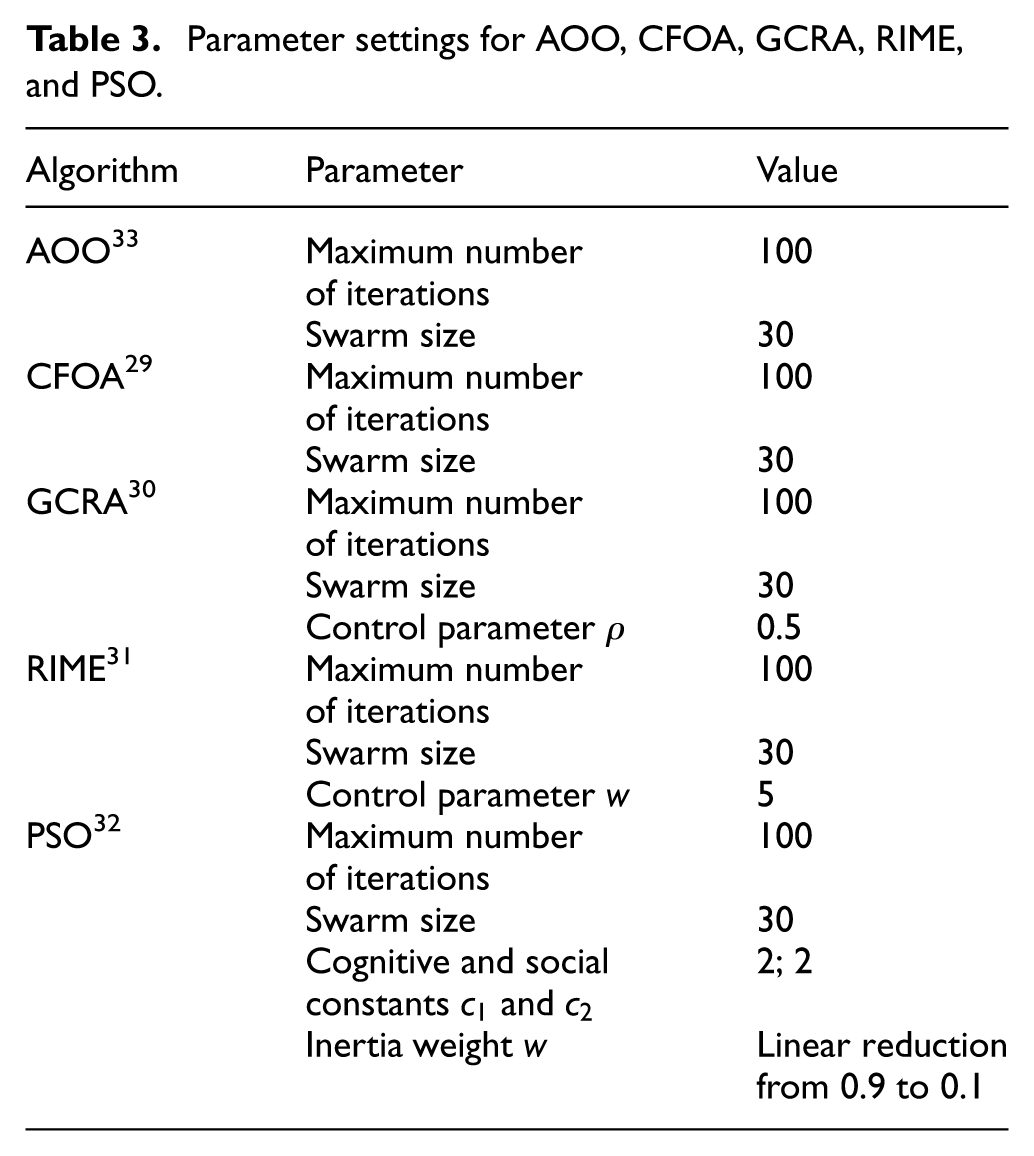
To evaluate the effectiveness of the proposed control strategy, the AOO algorithm is compared with four recent metaheuristic algorithms, catch fish optimization algorithm (CFOA), 29 greater cane rat algorithm (GCRA), 30 rime optimization algorithm (RIME), 31 and PSO. 32 These algorithms are selected due to their proven performance in continuous optimization problems and their recent adoption in control engineering applications. In all cases, fair benchmarking conditions are ensured by using identical simulation settings, including a maximum number of 100 iterations and a swarm size of 30 particles for each algorithm.
For AOO, no control parameters beyond the default search dynamics are used. Therefore, AOO is employed without any manual fine-tuning to avoid algorithm-specific bias and to ensure a fair comparison. All algorithms are executed using their standard or commonly recommended parameter settings. CFOA and GCRA are applied with their original structures; in the case of GCRA, the control parameter
The configuration of each algorithm, including its control parameters where applicable, is summarized in Table 3. This standardized setup enables a consistent and unbiased comparison of convergence behavior and final control performance across all tested optimization methods.
Parameter settings for AOO, CFOA, GCRA, RIME, and PSO.
Statistical analysis
To provide a statistically reliable comparison, each optimization algorithm is independently executed 25 times under identical simulation settings. The resulting cost function values are recorded and analyzed using both graphical and statistical methods. Figure 4 presents a comparative boxplot that illustrates the distribution, central tendency, and spread of the cost function values for all algorithms. As observed from the plot, the AOO algorithm yields the lowest median and minimum cost values, with a notably narrower interquartile range compared to the other methods.
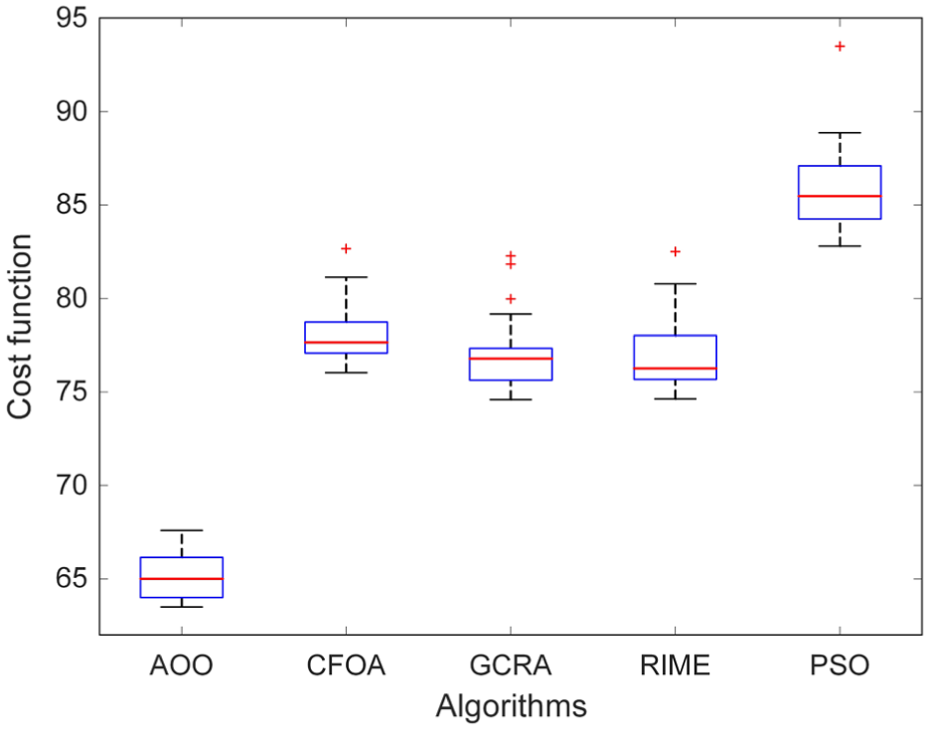
Comparative boxplot analysis.
This indicates a consistent and stable convergence behavior with minimal dispersion across trials. Further statistical metrics for each algorithm are summarized in Table 4. The AOO algorithm achieves the best average cost function value at 65.2185, significantly outperforming CFOA (78.1763), GCRA (77.0481), RIME (76.9805), and PSO (85.8583). In terms of variability, AOO also exhibits the most minor standard deviation (1.2091), demonstrating its robustness across repeated runs. It consistently ranks first in performance, with the lowest maximum and highest minimum values also belonging to AOO, reinforcing its dominance in both optimality and reliability.
Statistical comparison of algorithms for minimization of
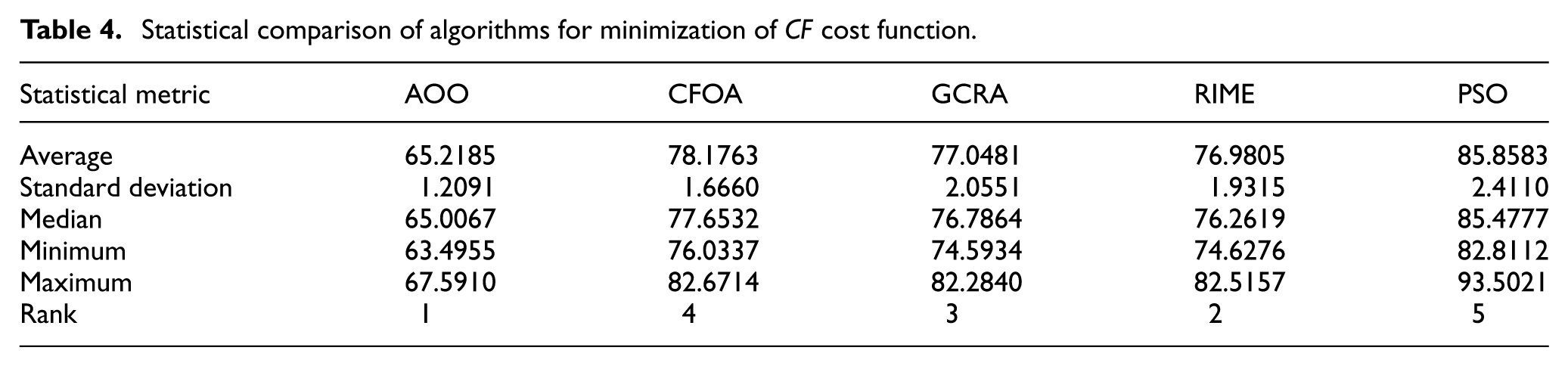
These results collectively indicate that the AOO algorithm both provides superior solutions for the controller tuning problem and exhibits higher statistical stability and repeatability than the other tested metaheuristics. This strengthens the argument for its practical suitability in high-precision control applications.
Convergence analysis
The convergence behavior of each optimization algorithm is investigated to assess its search efficiency and stability throughout the parameter-tuning process. Figure 5 illustrates the cost function trajectories over 100 iterations for AOO, CFOA, GCRA, RIME, and PSO. As observed from the convergence curves, the AOO algorithm exhibits the fastest and most stable descent toward a lower cost value compared to its counterparts. A rapid drop in the cost function is achieved within the first 20 iterations, followed by a smooth and consistent convergence to the global optimum without oscillation or stagnation.
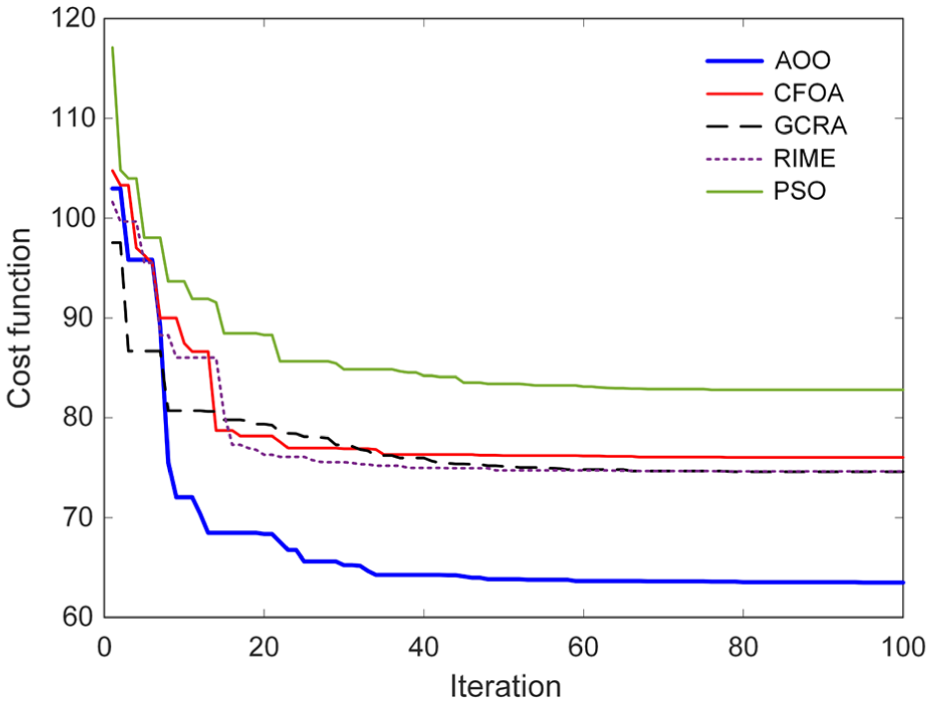
Convergence analysis.
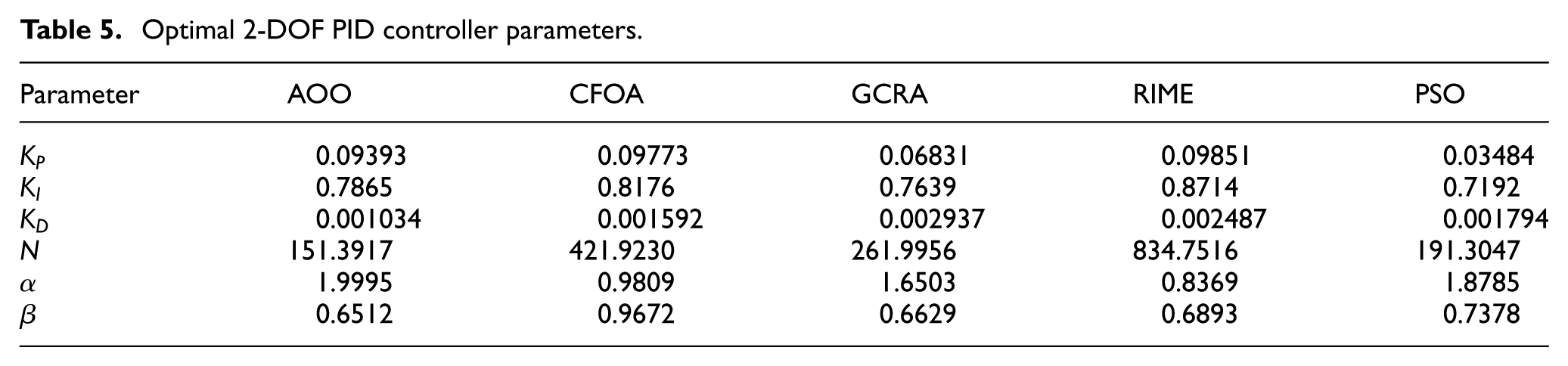
On the other hand, other algorithms exhibit somewhat slower convergence and larger final cost values. PSO, in particular, displaying a large initial cost and early stagnation, and cannot come close to the leading solutions in terms of solution quality within the given iteration budget. RIME and CFOA manage to converge moderately, although with more fluctuation and higher variance, whereas GCRA has a more stable declining pattern but end in a local optimum. To further reinforce the analysis, the best controller parameters of each algorithm are listed in Table 5. The AOO scheme provides the best set of 2-DOF PID parameters. The variation in parameter settings among the other algorithms reflects their different convergence properties and suboptimal solutions, which further corroborates the robustness and efficiency of AOO for the DC motor speed regulation problem.
Optimal 2-DOF PID controller parameters.
Closed-loop response analysis
The 2-DOF PID controllers designed by various optimization methods are tested through step response simulations for the closed-loop system. From the comparative time responses in Figure 6, it is observed that all the considered controllers successfully achieve stable tracking convergence to the desired setpoint of 150 rpm. However, as shown in the zoomed view in Figure 7, the response behaviors differ significantly among the methods, especially in terms of rise time, overshoot, and settling process.
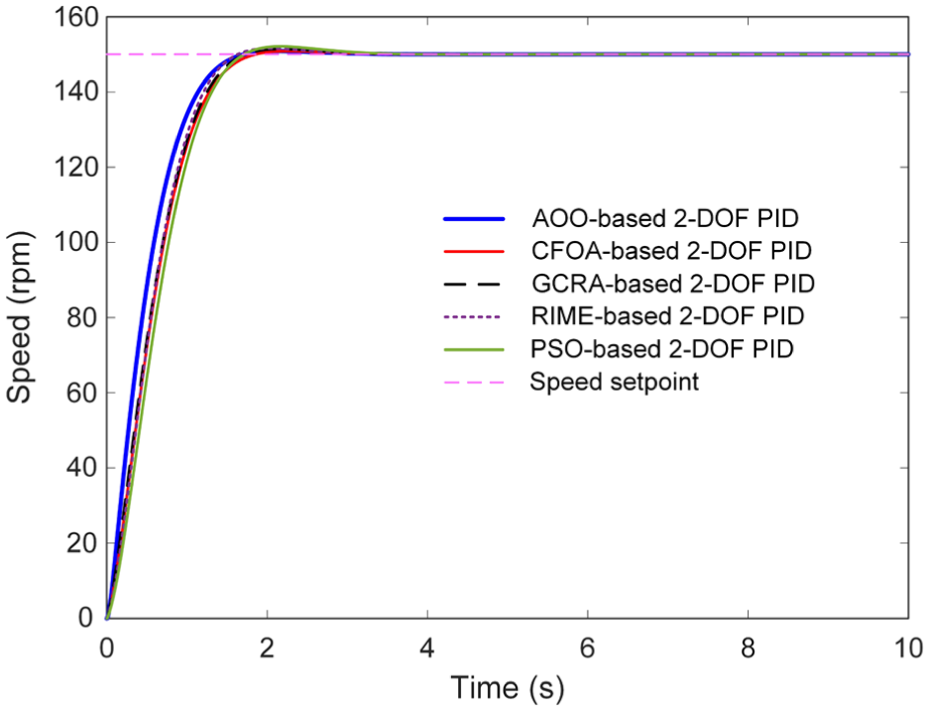
Comparative time response analysis of 2-DOF PID controlled DC motor.
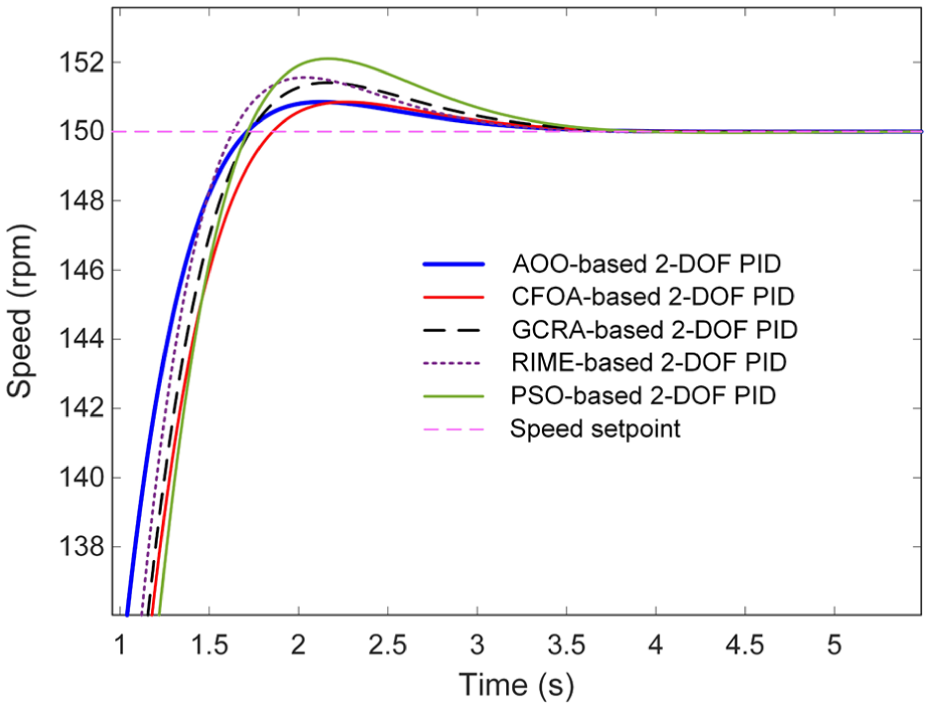
Detailed view of comparative time response analysis of 2-DOF PID controlled DC motor.
The scalar performance measures derived from the simulation results are reported in Table 6. The AOO-based controller has the best overall dynamic behavior among all tested algorithms. In particular, the proposed approach provide the shortest rise time (0.9217 s) and the best settling time (1.4143 s) with the minimum overshoot (0.5688%). The AOO-based 2-DOF PID peak value remains very close to the reference value without aggravated transient amplification, and the corresponding steady-state error is practically zero, which is comparable to other approaches within numerical tolerance.
Comparison of time response specifications.
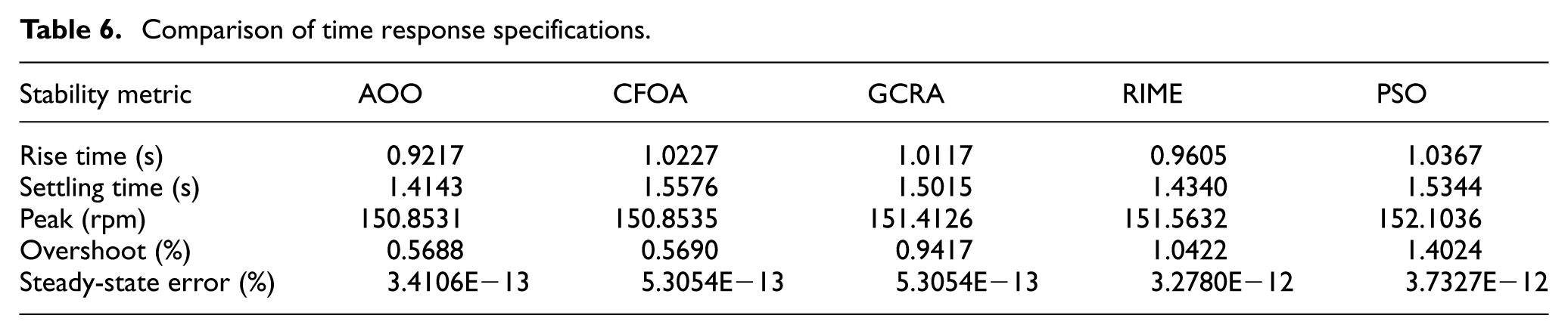
However, the PSO-based controller yields the worst performance in terms of maximum overshoot (1.4024%) and the slowest rise time (1.0367 s), representing a rather mild and oscillatory reaction. The CFOA, GCRA, and RIME approaches lead to intermediate results, with RIME having somewhat better settling performance but slightly larger overshoot compared with AOO. Under the same control structure and simulation conditions, the AOO-based 2-DOF PID method still outperforms all other candidates in terms of both transient and steady-state results, which corroborates its superiority for fast, stable, and accurate speed regulation.
It is worth noting that the speed of transient responses is deliberately moderated by the optimized controller parameters to prevent severe overshoot and oscillation. The proportional- and derivative-related parameters mainly influence the rise and settling times, whereas the integral gain contributes to minimizing the steady-state error, yielding a balanced trade-off between speed and stability under disturbances.
Reference input tracking performance of AOO-based 2-DOF PID controller
To understand the reference input tracking performance of the AOO-based 2-DOF PID controller, further simulations are also carried out for the above simple command under differing conditions. The system response for a series of step changes in the reference speed is shown in Figure 8. With the aid of the proposed controller, the system is able to track every transition with negligible overshoot and converged very fast after each change. Here, the response tracks the setpoint trajectory very well, and no steady-state error is introduced during the entire simulation time of 100 s.
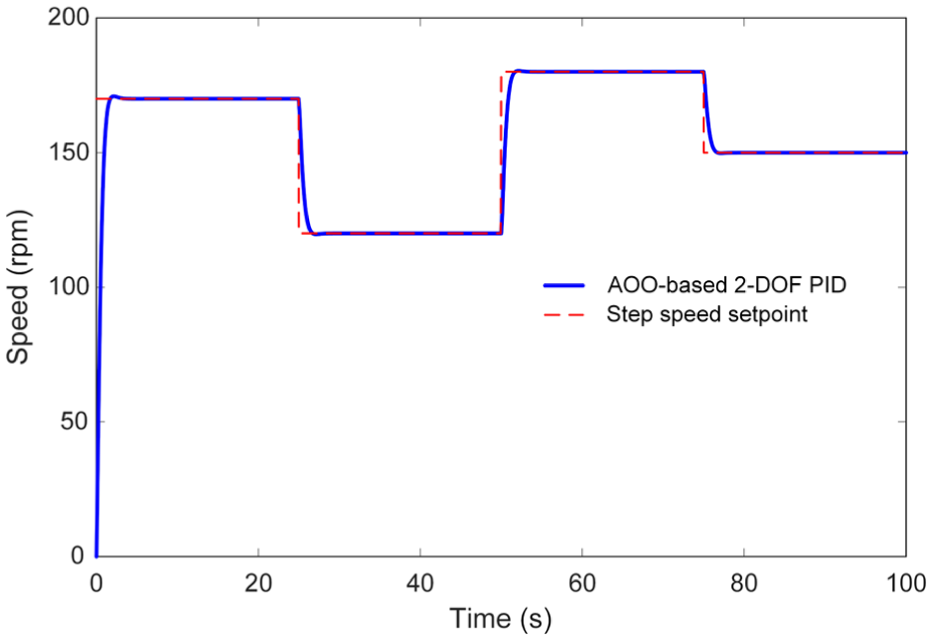
Time-domain analysis of the AOO-based 2-DOF PID controller under multiple step inputs.
To evaluate the performance of the AOO-based 2-DOF PID when facing more complexity and uncertainty using a widely changing speed reference, the speed reference is randomly chosen. As can be seen from Figure 9, in the presence of short-term and unexpected variations of the input signal, the AOO-based 2-DOF PID can achieve tracking results close to the desired speed profile. The output of the system tracks the complicated reference curve very well, and the tracking error is negligible.
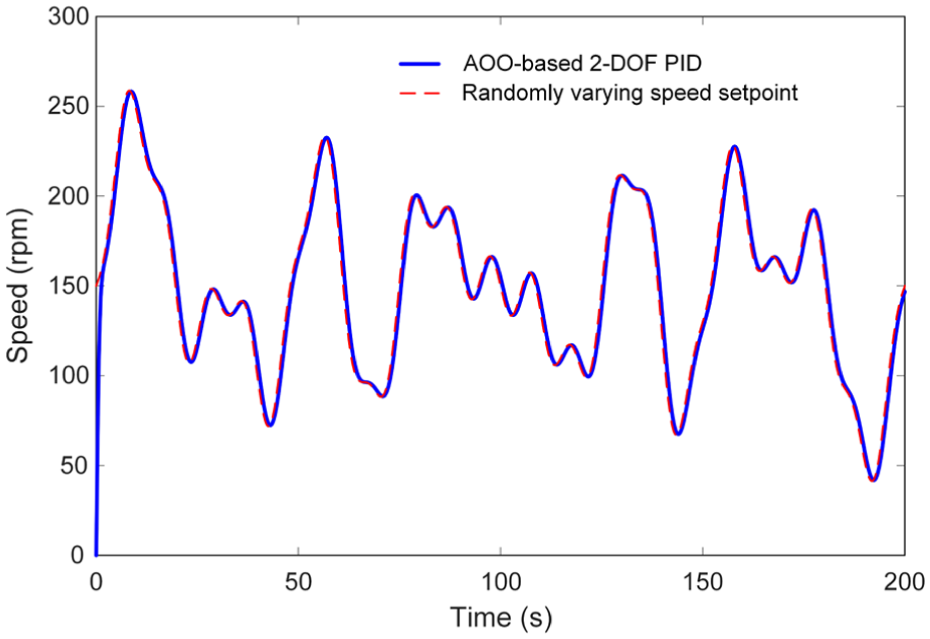
Time-domain analysis of the AOO-based 2-DOF PID controller under a randomly varying speed reference.
The obtained results suggest that the AOO-based 2-DOF PID scheme can achieve high-quality tracking for both deterministic and stochastic references. The controller provides a good stability and fast response behavior under all test conditions.
Under external disturbance and measurement noise
The performance of the AOO-based 2-DOF PID controller is also tested in the presence of external disturbances and measurement noise, as shown in Figure 10. In this simulation, instantaneous torque disturbances are applied to the system at various points in time, and Gaussian white noise is added to the speed feedback signal to simulate the presence of sensor noise. The controller is anticipated to keep the speed tracking performance arbitrarily close to the ideal despite these disturbances.
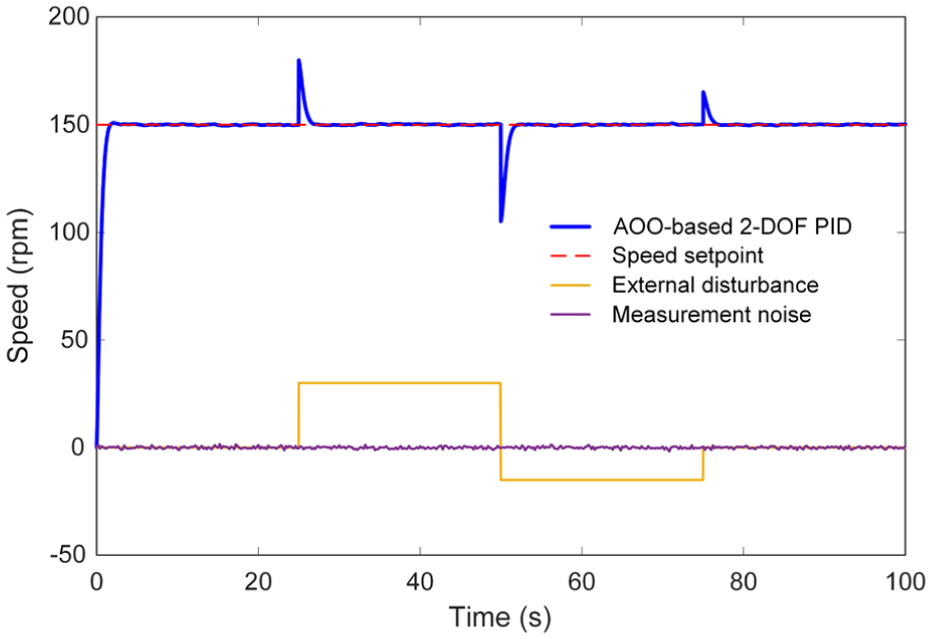
Time-domain analysis of the AOO-based 2-DOF PID controller in the presence of external disturbances and measurement noise.
The time-domain response results prove that the AOO-based 2-DOF PID controller can effectively eliminate the external disturbance inputs, while the output speed exhibits only small fluctuations. These transient dips and spikes, although visible, decay rapidly, and the system returns to the reference within a minimal recovery time. In addition, the effect of measurement noise is barely observable in the speed output, which suggests that the derivative filter structure in the 2-DOF PID design and the well-tuned control parameters play an important role in noise robustness. To sum up, these findings demonstrate that the proposed AOO-based 2-DOF PID can achieve good disturbance attenuation and noise robustness without deteriorating the steady-state performance and transient response. This highlights the usefulness of the proposed optimization framework for handling noise and uncertainty within the control loop, which are common challenges in practical motor drive applications.
Experimental results
The feasibility and effectiveness of the proposed AOO-based 2-DOF PID control scheme in practice are verified by experiments on a laboratory-scale DC motor platform. The experimental setup is shown in Figure 11 and consists of a Pololu 37D×68L mm 12 V metal gearmotor with a 19:1 gear ratio controlled by an IBT-2 H-bridge motor driver. The unit is powered by a regulated DC power supply and connected to a host computer through Arduino-compatible microcontroller hardware.
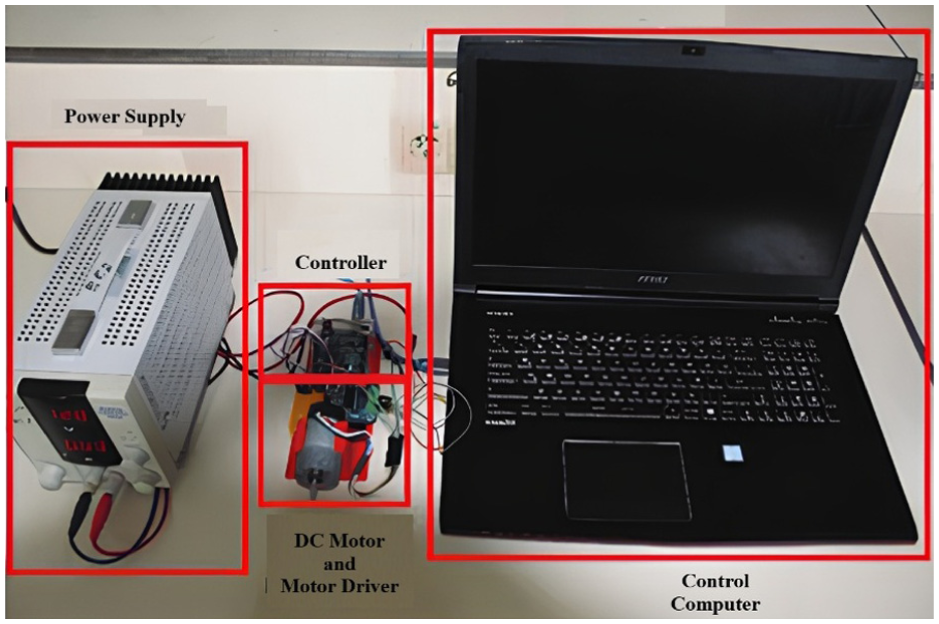
Experimental setup for real-time implementation of AOO-based 2-DOF PID controller.
Real-time signal generation and data acquisition, as well as controller deployment, are performed using MATLAB/Simulink and the Arduino Hardware Support Package. The proposed optimal control law is implemented through the Simulink environment and downloaded to an embedded controller, thus enabling intuitive computer-based implementation. For real-time implementation, the control algorithm runs with a fixed sampling time via the Simulink–Arduino interface. Communication between the host and the embedded hardware occurs over a standard serial link, which introduces a small, constant delay that is negligible relative to the mechanical time constant of the DC motor. Because the AOO scheme is used only in the offline tuning step, the real-time control loop consists only of the 2-DOF PID computations, which guarantee reliable real-time execution with low computational burden. These features of the implementation clearly demonstrate the practical deployability of the proposed controller.
Figure 12 presents the real-time control model based on Simulink for the experimental test. The model combines the AOO-based 2-DOF PID controller with the identified DC motor model and the real motor hardware. The reference input is the same for the simulation model and the experimental loop for the purpose of comparison between the model outputs and real-time measurements. Two stages of processing are applied to the encoder feedback from the motor: count differentiation and low-pass filtering to acquire rotational speed, which is returned to the controller. The control command output from the experimental 2-DOF PID block is sent to the motor driver through the Arduino analog output interface, while a real-time pacer block is added to guarantee synchronous execution. This integrated design makes it possible to examine reference tracking performance, model–experiment agreement, and real-time control behavior in a uniform manner.
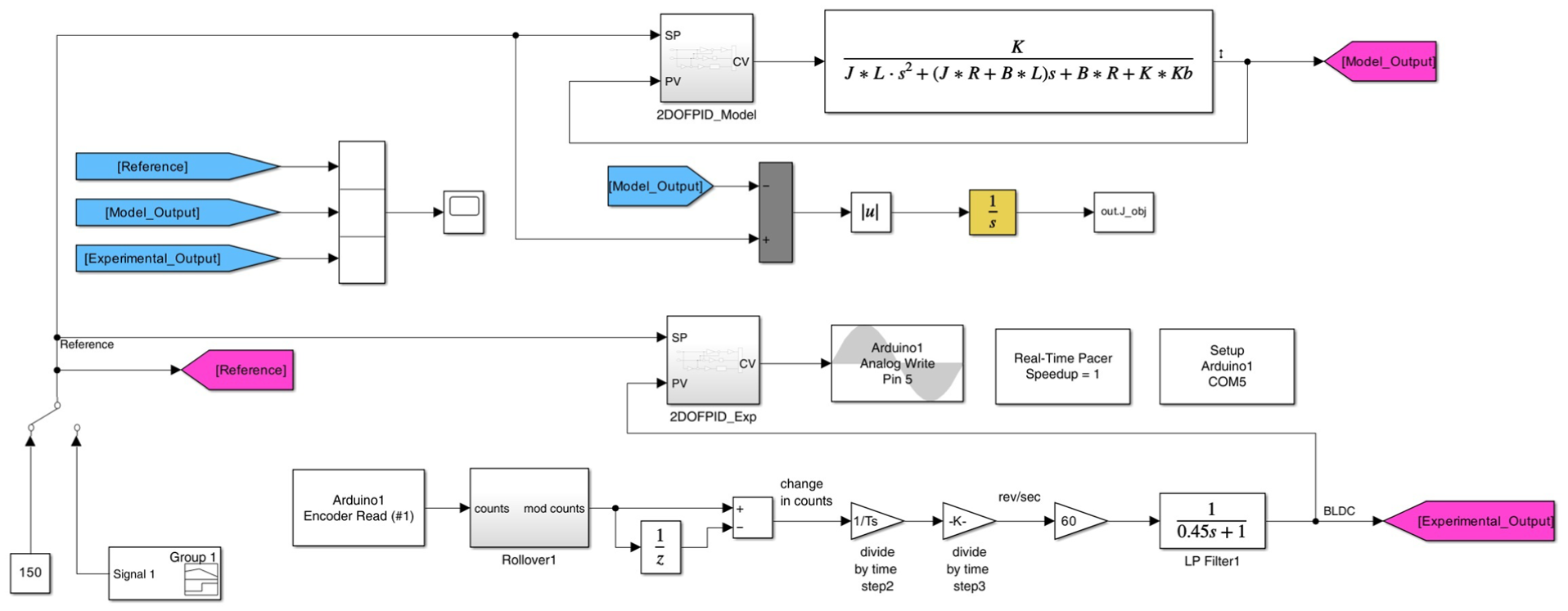
Developed Simulink Model.
Figure 13 shows the time-domain speed responses of five different 2-DOF PID controllers to the reference signal. The experimental results show that the tracking performance and dynamic response of the AOO-based 2-DOF PID are superior. Although all controllers are successful in reaching the steady-state value, the AOO-based structure exhibits the shortest rise time and much lower overshoot among its counterparts. An expanded window from 2 to 3 s reveals that the AOO-based 2-DOF PID trajectory tracks the reference very closely without large oscillations. In comparison, other approaches have obvious oscillations or hysteresis in their transient performances. These results coincide with those from the simulations, demonstrating the potential to transfer AOO-based parameters directly from model-based tuning to real hardware implementation.
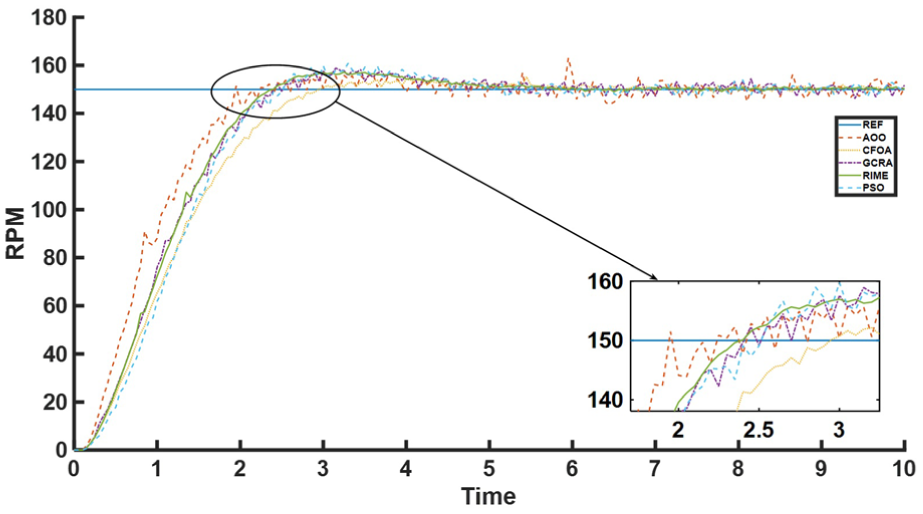
Comparative experimental time responses of 2-DOF PID controllers tuned by different optimization algorithms.
More results on the performance of the AOO-based 2-DOF PID are shown in Figure 14, where a complicated reference signal containing many step changes is used for the motor system. The experimental motor’s response under the AOO-based 2-DOF PID is also compared with the model output obtained from simulation and the desired reference. The controller tracks
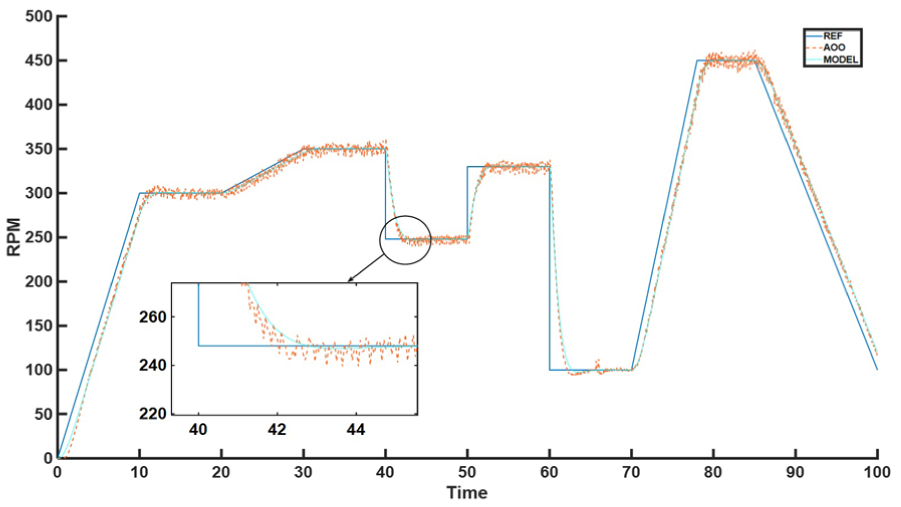
Experimental model tracking performance of AOO-based 2-DOF PID controller under complex reference profile.
To sum up, the real-time experiments demonstrate that the proposed AOO-based 2-DOF PID controller can achieve superior performance in speed control under actual operating conditions. The transient performance is very good, and the system is robust to high-frequency variations and not sensitive to unmodeled dynamics or hardware implementation imperfections. These results confirm the practicality and usefulness of nature-inspired optimization methods with flexible PID-based structures for intelligent motor control.
Figure 14 shows how well the AOO-based 2-DOF PID controller can track a non-trivial, piecewise reference profile for a DC motor system in real time. The desired reference trajectory, experimental motor response, and identified model output are shown as blue solid, orange dotted, and green dashed lines, respectively. The response shows good tracking for both fast rise and fall transitions and steady state. The zoomed-in plot highlights the local tracking error at a sudden setpoint drop, illustrating that the controller is able to respond quickly and robustly to such abrupt changes without causing excessive overshoot or oscillation.
Discussion
The conclusion of the investigation is that the AOO-based 2-DOF PID is a promising technique for high-performance DC motor speed control. AOO obtains better cost values more frequently than the other well-known metaheuristic algorithms, as illustrated by statistical metrics and boxplot distributions. This performance improvement is achieved due to the dynamic search behavior of AOO, which provides a good balance between exploration and exploitation, avoids premature convergence, and discovers globally optimal solutions for the controller parameters.
Regarding the speed of convergence, AOO rapidly converges to very low-cost values at the beginning of the searching process, indicating that it achieves better performance than the other methods in terms of both convergence stability and final objective value. Improved gain allocation and derivative filtering characteristics are achieved by the controller parameters tuned using AOO. The AOO-based 2-DOF PID affirms its feasibility for high-precision control applications by achieving the shortest rise time and settling time, minimal overshoot, and nearly zero steady-state error in the simulations. Also, the robustness of the proposed controller is proven through challenging reference tracking problems. When subjected to randomly changing reference speeds, the AOO-based 2-DOF PID is able to achieve accurate tracking of the reference signal with low tracking error and delay.
The simulation results are validated through an experimental testbed consisting of a physical DC motor system, where the real-time implementation of the AOO-based 2-DOF PID control attains the desired dynamic response. With the simulated and experimental outputs matching well with each other, the results fully support the practical implementation of the proposed method and confirm the proposed algorithm’s generalization capability from system models to physical systems.
While the AOO algorithm has better control performance and convergence stability, it should be noted that there is a corresponding computational cost during the offline optimization process. Much like other nature-inspired population-based metaheuristic algorithms, AOO also requires multiple fitness evaluations over the iterations, increasing the total tuning time. This computational expense, however, is incurred only once during controller design, since AOO is not executed online. After optimization, only the time-invariant 2-DOF PID parameters are applied to the control loop, so there is almost no computational burden for online operation. Therefore, the achieved performance gains in tracking accuracy, robustness, and convergence reliability are worth the extra offline computational cost.
Conclusions and perspectives for future research
In this paper, a new 2-DOF PID controller based on the AOO optimization algorithm is designed and tested for DC motor speed control. AOO, a nature-inspired optimization algorithm based on the hygroscopic mechanism of ASL dispersal, is employed to find the optimal controller parameters that minimize a composite cost function including IAE and NPO. The results of extensive simulation and experimental tests validate that the AOO-based 2-DOF PID significantly outperforms other state-of-the-art metaheuristic algorithms such as CFOA, GCRA, RIME, and PSO in terms of a wide range of performance measures, including rise time, settling time, overshoot, steady-state error, convergence speed, and statistical consistency.
The controller achieves high accuracy in reference tracking tasks for both deterministic and stochastic input signals and shows strong robustness to external perturbations and measurement noise. In addition, the real-time experimental implementation of the control algorithm further strengthens the claim of its practicality and reliability beyond simulation constraints. These results demonstrate that the proposed method constitutes a promising approach for addressing modern control problems that require high accuracy and adaptability.
From this perspective, several opportunities for further research are clear. First, by formulating AOO within a multi-objective optimization framework, conflicting control objectives can be considered simultaneously. Second, real-time adaptive tuning algorithms may be developed based on AOO to update controller parameters online for systems with time-varying or unknown dynamics. Third, it is of interest to investigate the proposed approach in nonlinear, coupled, and/or MIMO systems, such as those in robotics, automotive, and renewable energy fields. Finally, comparative studies involving hybrid or ensemble metaheuristics could be conducted to reveal algorithmic synergistic effects that may further improve control performance in more complex operating environments.
Considering these findings, future research may explore the integration of offline optimization-based tuning with adaptive or hybrid parameter adjustment strategies. Recent studies have shown that combining nominal controller tuning with observer-assisted or disturbance-aware mechanisms can significantly enhance robustness in systems with strong nonlinearities and coupled dynamics.34,35 In this context, extending the proposed AOO-based framework toward hybrid offline–online tuning architectures represents a promising direction for more complex and uncertain control applications.
Footnotes
Acknowledgements
The authors would like to express their sincere gratitude to Lukas Prokop and Stanislav Misak for their exceptional supervision, project administration, and overall guidance throughout the course of this project. Their expertise and support were instrumental to its success.
Ethics declaration
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Author contributions
Gökhan Yüksek, Serdar Ekinci, Timur Lale: Conceptualization, Methodology, Software, Visualization, Investigation, Writing – Original draft preparation. Davut Izci, Rıdvan Fırat Çınar: Data curation, Validation, Supervision, Resources, Writing – Review & Editing. Mohit Bajaj, Vojtech Blazek, Ievgen Zaitsev: Project administration, Supervision, Resources, Writing – Review & Editing.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is funded by European Union under the REFRESH—Research Excellence For Region Sustainability and High-Tech Industries Project via the Operational Programme Just Transition under Grant CZ.10.03.01/00/22_003/0000048; in part by the National Centre for Energy II and ExPEDite Project a Research and Innovation Action to Support the Implementation of the Climate Neutral and Smart Cities Mission Project TN02000025; and in part by ExPEDite through European Union’s Horizon Mission Programme under Grant 101139527.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.*