
Abstract
Surface-mounted Permanent Magnet Synchronous Motors (SPMSMs) are key components in industrial servo drives, due to their high precision and efficiency. However, their performance is often degraded by parameter variations and load disturbances, leading to poor robustness and slow response. To address integral saturation and chattering, this paper proposes a Nonlinear Integral Sliding Mode Control with a Variable Exponential Reaching Law (NISMC-VERL). The method features: (1) a nonlinear sliding surface that prevents windup under large errors and improves precision under small errors; (2) a variable exponential reaching law that accelerates convergence when far from the sliding surface and suppresses chattering near it. Experimental results show that the proposed method outperforms conventional techniques in dynamic response, disturbance rejection, and steady-state accuracy, demonstrating its strong potential for industrial applications.
Introduction
SPMSMs, recognized for their outstanding motion control precision, high power density, and excellent energy conversion efficiency, have become core actuating components in modern industrial servo drive systems. In high-end manufacturing fields such as industrial robot joint drives, high-dynamic CNC machine tool feed axes, precision electronic assembly and inspection equipment, and high-speed material handling systems, SPMSMs provide the critical power foundation for achieving high-speed, high-precision, and highly reliable motion control.1–3 However, the complex industrial operating environment—including frequent load transients, complex multi-axis coupling effects, motor parameter drift due to prolonged operation, and nonlinearities like gear backlash—renders SPMSM servo systems highly susceptible to external disturbances and internal parameter variations. 4 These factors severely constrain the system’s regulation accuracy and dynamic response quality across a wide speed range, directly impacting the production equipment’s processing efficiency, product consistency, and operational reliability. Consequently, developing advanced control strategies that simultaneously offer strong robustness, high dynamic performance, and excellent steady-state precision has emerged as a central research focus for advancing industrial servo systems toward higher performance.
Among various nonlinear control methods, sliding mode control (SMC) has attracted significant attention due to its invariance to matched uncertainties, intuitive design, and strong robustness.5,6 Its fundamental principle involves designing a discontinuous control law to force the system state trajectory to reach and remain on a predetermined sliding surface within a finite time, thereby suppressing parameter perturbations and external disturbances.7,8 This characteristic aligns closely with the urgent need for robust disturbance rejection in industrial servo systems.
To eliminate the steady-state error inherent in conventional SMC, researchers introduced integral sliding mode control (ISMC). For instance, the pioneering work by Chern and Wu 9 incorporated an integral term into the sliding surface design, and Baik et al. 10 successfully applied it to PMSM control. The introduction of the integral term effectively enhances the system’s steady-state accuracy and disturbance rejection capability. 11 However, in industrial servo applications, large tracking errors caused by extensive step commands, sudden load impacts, or mechanical overshoot can easily lead to rapid accumulation in the traditional linear integral term, triggering an “integral windup” phenomenon. This not only degrades the system’s transient response (e.g. causing overshoot, prolonging settling time) but may also threaten system stability in extreme cases, limiting its direct application in high-end servo scenarios. 12 In response, research proposed a nonlinear integral sliding surface based on a potential energy function. 13 However, when the error exceeds a threshold (|e| ≥ β), it simply saturates at a fixed value ±β. While this can limit the control output, it sacrifices the ability to dynamically adjust the integral term, resulting in limited and inflexible suppression effectiveness.
The reaching law determines the dynamic process of the system state approaching the sliding surface, directly affecting the convergence speed and chattering intensity. The traditional exponential reaching law guarantees finite-time reaching, but its fixed parameters make it difficult to balance “fast reaching when far from the sliding surface” and “chattering suppression when near the sliding surface.”14,15 The latter is crucial for smooth servo system operation, reducing mechanical wear, and avoiding excitation of unmodeled high-frequency dynamics. To address this, power rate reaching laws16,17 and piecewise/dual power rate reaching laws18–20 have been proposed. By allowing different power terms to dominate in different state regions, they attempt to balance convergence speed and smoothness. Nevertheless, the parameter adaptability of these methods remains limited, and the transition of their switching points or dominant terms is often piecewise or abrupt, failing to achieve continuous and smooth adaptive adjustment of the gain in response to changes in the system state. To address this, this paper innovatively proposes a Variable Exponential Reaching Law (VERL). Its core advantage lies in the fact that the exponent of the reaching law can vary continuously based on the distance between the system state and the sliding surface, thereby achieving global optimization throughout the entire reaching process: it provides a near time-optimal strong convergence force to ensure a fast response when far from the sliding surface, while smoothly transitioning to a weak gain near the sliding surface to fundamentally suppress chattering.
To solve integral saturation and chattering in SPMSM sliding mode control and the inherent trade-off between convergence speed and steady-state precision of traditional methods, and considering the comprehensive performance requirements of industrial servo systems, this paper proposes a NISMC-VERL for SPMSM drive systems. The core contributions of this method are twofold:
First, a novel nonlinear integral sliding surface is designed, where the integral term gain adjusts dynamically with the error magnitude. It actively suppresses integral accumulation during large errors to effectively prevent windup and overshoot, while enhancing the integral action during small errors to guarantee extremely high steady-state precision.
Second, an innovative Variable Exponential Reaching Law (VERL) is proposed. The exponent of this reaching law varies continuously based on the distance of the system state from the sliding mode surface. It achieves near time-optimal fast convergence in the reaching phase and ensures a smooth transition for significant chattering suppression in the sliding phase, thereby optimizing dynamic performance globally.
Through theoretical analysis, simulation experiments, and comparisons with various conventional methods, the superiority of the proposed strategy in handling load disturbances, parameter variations, and enhancing overall servo performance is verified, offering an effective solution for high-performance industrial servo drives.
System model
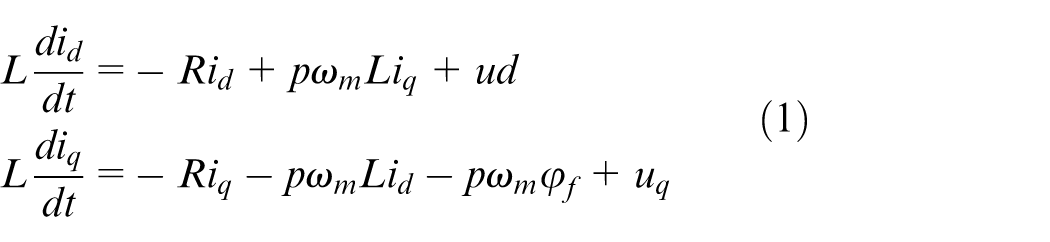
For the requirements of high-performance control in industrial servo systems, the mathematical model of the SPMSM serves as the foundation for controller design. Under ideal conditions (such as neglecting magnetic saturation, iron losses, and inverter nonlinearities) and based on the vector control framework, the stator voltage equations of the SPMSM in the synchronous rotating d-q reference frame can be expressed as follows (where, due to the surface-mounted structure of the motor, it satisfies
where

where
Design of the NISMC-VERL
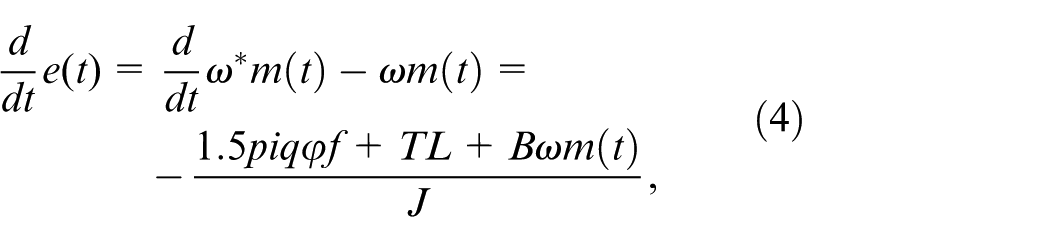
The control mechanism of the speed loop lies in finding the optimal output signal from the controller to ensure that the mechanical angular speed

Derive equation (3) to obtain:
The linear sliding surface is23–25:

where

where
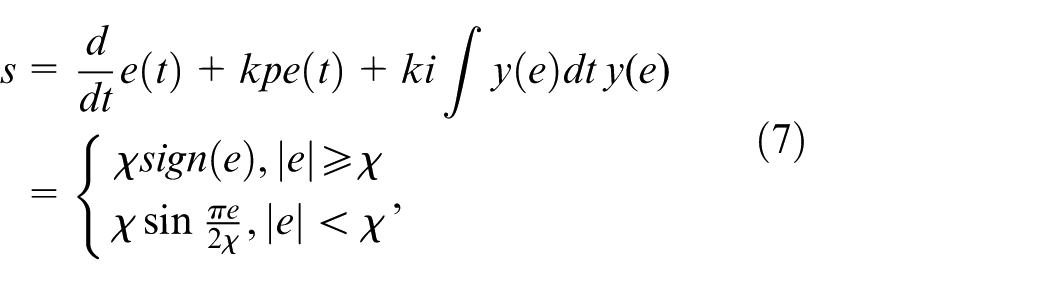
where
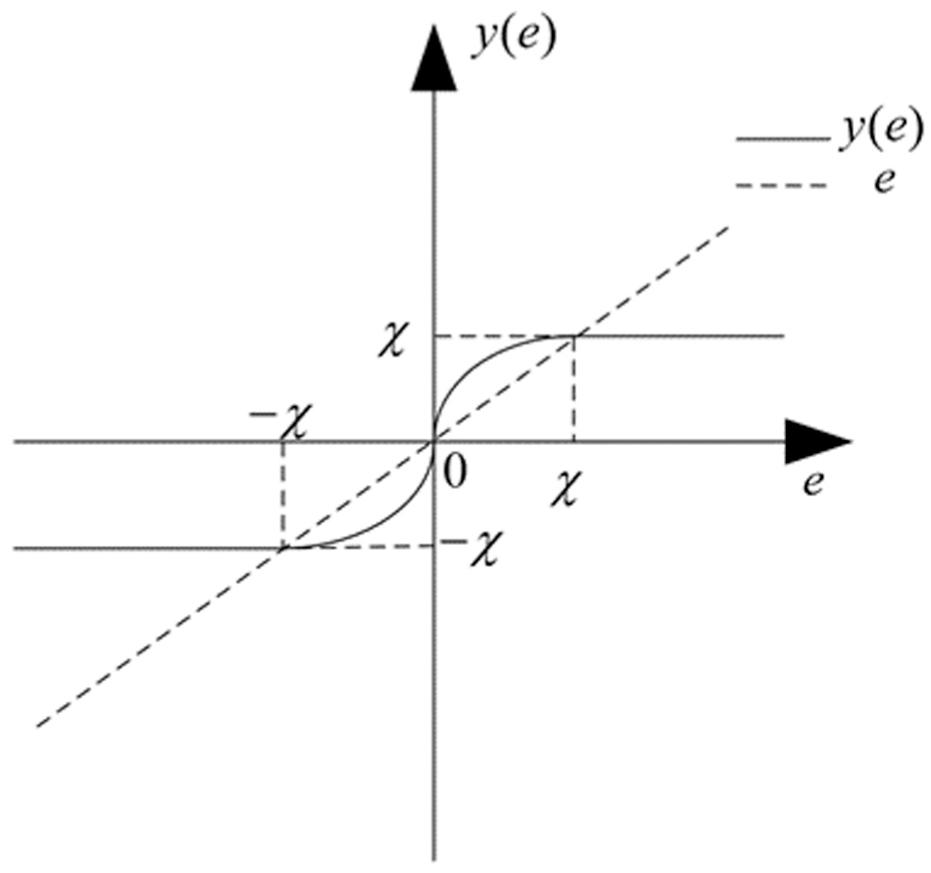
The characteristic curve of the nonlinear function.
The derivative of equation (7) and the exponential reaching law (ERL) 22 is chosen as:

where

The NISMC sliding mode surface control block diagram is shown in Figure 2.
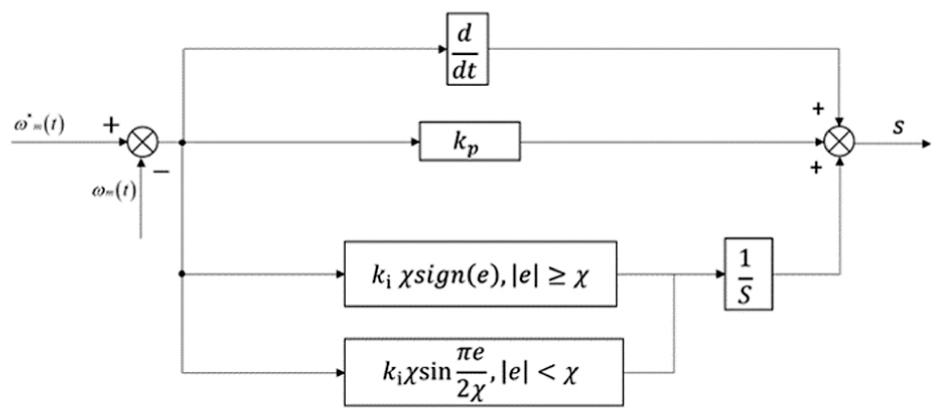
NISM surface control block diagram.
To demonstrate the stability of equation (9), the Lyapunov function
23
is designed to be
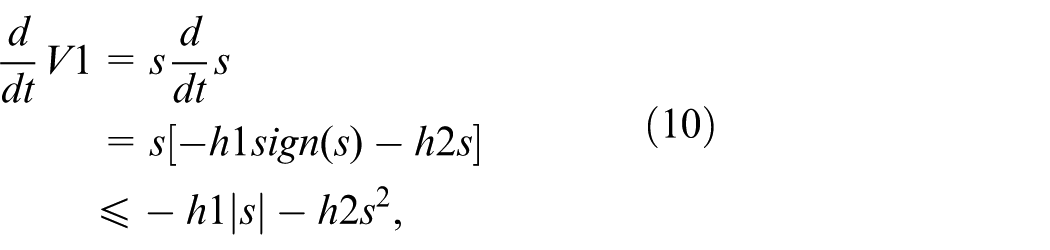
According to equation (10), the system is stable when

where
Combined equations (4), (7) and (11) can be obtained:
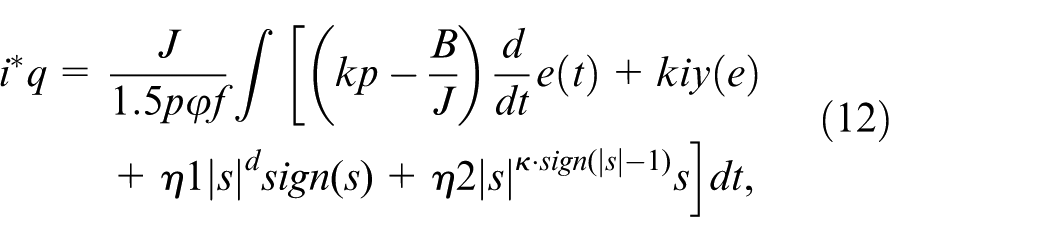

where

where

Taking the first-order time derivative of equation (15) and substituting the proposed VERL (equation (11)) into it, we obtain:

The convergence characteristics of the reaching law are discussed in two cases according to the distance between the system state and the sliding surface:
Case 1: When

Substituting

Case 2: When

Combining the above two cases, let

This inequality fully satisfies the finite-time stability criterion in Lemma 1, which proves that the system state can converge to the sliding surface

where
In addition, it can be seen from equation (16) that
According to Lyapunov stability theory, the closed-loop system is globally asymptotically stable, which lays a theoretical foundation for the subsequent engineering implementation of the controller.
The VERL control block diagram is shown in Figure 3.
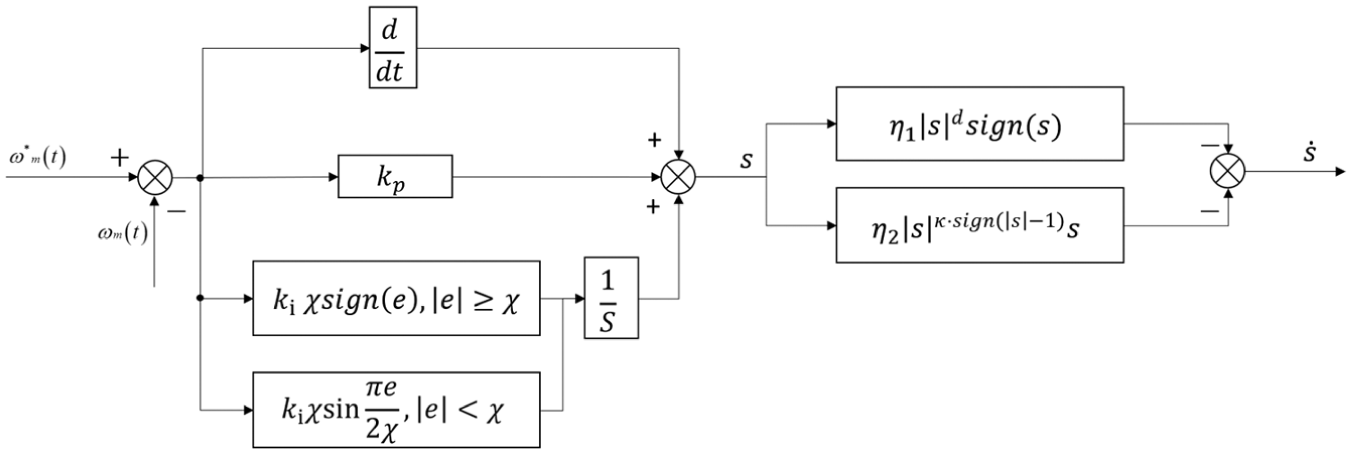
VERL control block diagram.
To demonstrate the stability of equation (12), the Lyapunov function is designed to be
According to equation (13), the system is stable when
Experimental analysis
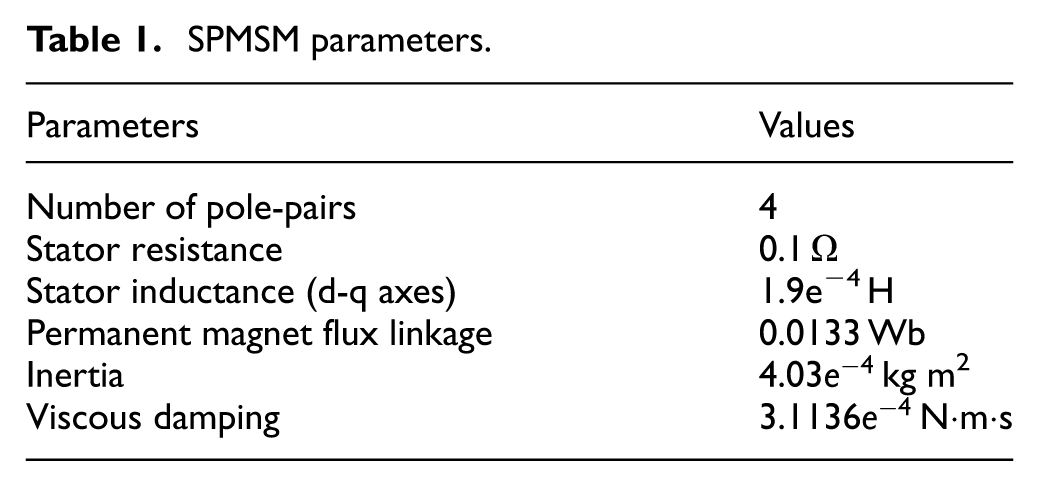
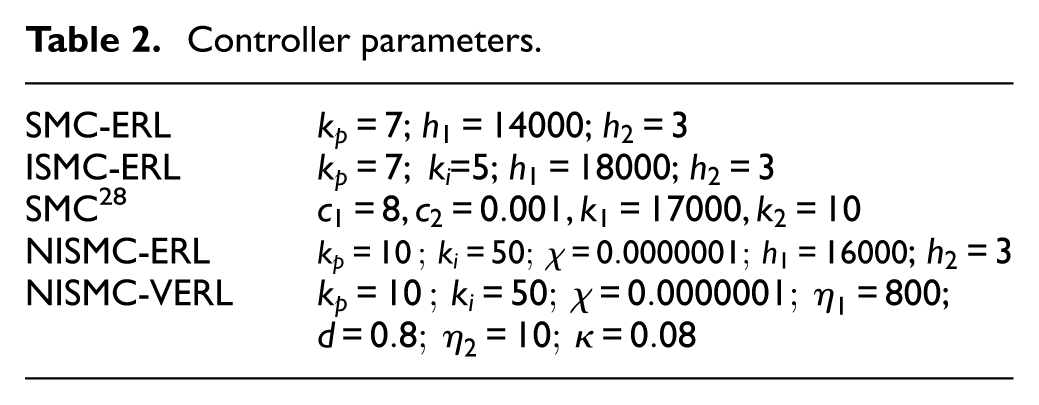
The experimental investigation employs a comprehensive test platform centered around a TMS320F28379D digital signal processor. The experimental apparatus, incorporates precision current sensors, high-resolution encoders, and a programmable load unit to facilitate rigorous performance evaluation. The SMC-ERL, ISMC-ERL, SMC 28 and the proposed NISMC-ERL were selected for comparative analysis. The specific parameters of the motor are listed in Table 1. The switching frequency was set to 10 kHz, a low-pass filter was adopted with a cutoff frequency of 0.001 HZ, and the parameters of the four control strategies are presented in Table 2. The experimental parameters were determined empirically through iterative debugging and experimentation.
SPMSM parameters.
Controller parameters.
The experiment was configured for no-load startup with a given speed of 600 rpm. The speed was ramped up to 900 rpm at 10 s, ramped down to 750 rpm at 20 s, a step load of 0.05 N·m was applied at 30 s, the load was reduced by a step of 0.05 N·m at 40 s, and the flux linkage was increased to 1.2 time.
During the no-load startup process to 600 rpm (Figure 4(a)), the traditional ISMC-ERL exhibited a significant overshoot of approximately 68 rpm along with subsequent oscillations due to the rapid saturation of the integral term under large initial errors, revealing the inherent defect of integral sliding mode control. In contrast, the NISMC-VERL strategy dynamically suppresses the accumulation of the integral term when the error is large by introducing a nonlinear function, fundamentally preventing integral saturation and startup overshoot. Meanwhile, its variable exponent reaching law provides a strong adaptive reaching force when the system state is far from the sliding surface, enabling the speed to converge quickly and smoothly to the set value within 0.5 s, demonstrating excellent dynamic tracking capability. This advantage is further maintained during the speed-up (Figure 4(b)) and speed-down (Figure 4(d)) processes. Whether ramping up from 600 to 900 rpm or ramping down from 900 to 750 rpm, the NISMC-VERL achieves a smooth transition with almost no overshoot or reverse impact. The fundamental reason lies in the variable exponent reaching law’s ability to adjust the control gain in real time and continuously based on the distance to the sliding surface: ensuring a fast response in the initial tracking stage and automatically reducing the gain smoothly when approaching the target, thus perfectly balancing the trade-off between response speed and process stability.
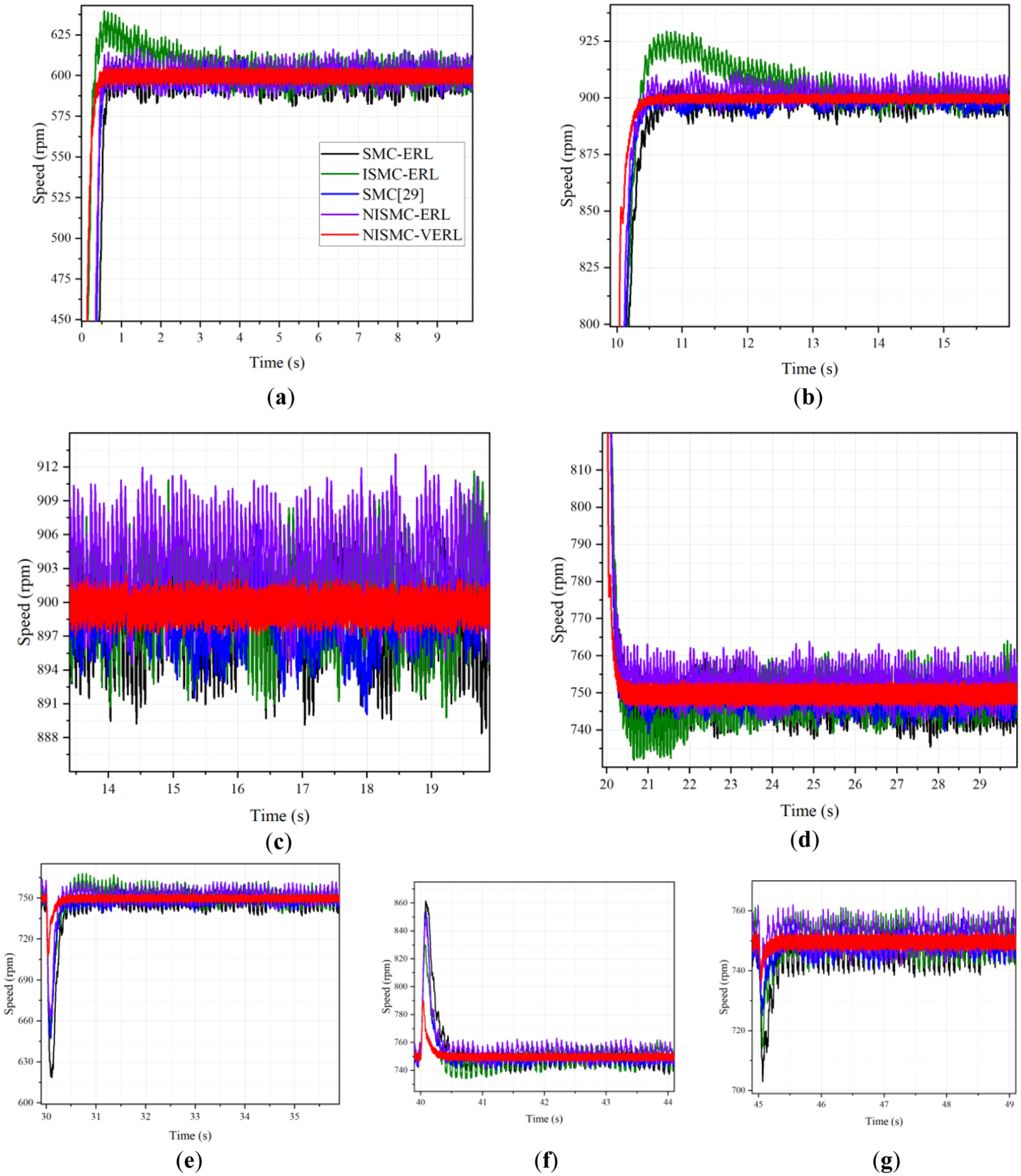
Experimental diagram of speed. (a) No-load start-up; (b) speed-up; (c) chattering; (d) speed-down; (e) load application; (f) unload; (g) flux change.
After the system enters a steady state, the chattering suppression capability of the control strategy becomes a key performance indicator (Figure 4(c)). Due to the adoption of a fixed high switching gain, the traditional SMC-ERL produces obvious speed fluctuations of ±10 rpm. In contrast, through the innovative design of its reaching law, the NISMC-VERL makes the gain decrease smoothly in an exponential manner with the state when the system is very close to the sliding surface, thereby fundamentally weakening the high-frequency chattering caused by the direct switching of the sign function and suppressing the steady-state fluctuations to an extremely low level of ±2 rpm. This not only improves control accuracy but also brings direct benefits in reducing current harmonics and motor losses.
Faced with external disturbances and internal parameter variations, the robustness of the control system is severely tested. In the tests of sudden application and removal of a 0.04 N·m load (Figure 4(e) and (f)), the NISMC-VERL demonstrated outstanding anti-disturbance performance. At the moment of loading, it exhibited the smallest speed drop (approximately 45 rpm), and after unloading, it had the lowest speed overshoot (approximately 40 rpm) and the fastest speed to restore steady state. This is attributed to the dual-layer adaptive mechanism composed of its “nonlinear sliding surface” and “variable exponent reaching law”: the nonlinear sliding surface can quickly sense disturbance errors and convert them into effective integral compensation; at the same time, the reaching law can immediately respond to the dynamic changes of the system caused by disturbances and dynamically adjust the control gain, thereby collaboratively achieving rapid offset and suppression of disturbances. A more severe test comes from changes in internal motor parameters (Figure 4(g), increased to 1.2 times the original value). Such parameter perturbations directly affect the torque coefficient and are prone to causing system instability. Experimental results show that the NISMC-VERL exhibits strong adaptability to this uncertainty: the speed only experiences small and transient fluctuations before re-stabilizing within 38 s, which is much faster than other methods. This verifies that its control architecture has inherent robustness against changes in model parameters. The optimization of system dynamics by the nonlinear integral sliding surface combined with the online compensation of uncertainties by the variable exponent reaching law jointly ensures the stable operation of the system under a wide range of parameter variations.
It can be seen from the full-working-condition experimental results in Figure 4 that although the newly added state-of-the-art comparative method SMC 28 has certain optimizations in dynamic response and anti-disturbance performance compared with the traditional SMC-ERL and ISMC-ERL, its overall control performance is still markedly inferior to the NISMC-VERL strategy proposed in this paper. In the no-load start-up stage at 600 rpm, SMC 28 has a start-up response time of 0.6 s with slight overshoot, while the proposed method only takes 0.3 s to complete speed tracking. Meanwhile, relying on the adaptive adjustment characteristic of the nonlinear integral sliding surface, it fundamentally suppresses integral saturation and realizes an overshoot-free smooth start-up. After entering the steady-state operation stage, the steady-state speed fluctuation of SMC 28 still reaches ± 8 rpm, while the proposed method suppresses the steady-state speed chattering to ±2 rpm through the continuous adaptive gain adjustment of the variable exponential reaching law, showing a more excellent smooth control performance. In the dynamic working conditions of speed acceleration/deceleration and sudden application and removal of 0.05 N·m load, the peak speed drop of SMC 28 under load disturbance reaches 90 rpm, and it takes longer to restore the speed to the steady state. In contrast, the proposed method only has a speed drop of 45 rpm, and can complete disturbance suppression and speed recovery more quickly, exhibiting a more outstanding anti-disturbance capability. Under the perturbation condition where the flux linkage parameter is increased to 1.2 times the initial value, SMC 28 takes 30 s to re-stabilize the speed, while the proposed method only needs 13 s to restore stable operation. This further verifies that the collaboratively optimized control architecture combining the proposed nonlinear integral sliding surface and variable exponential reaching law has stronger robustness against model parameter uncertainties, and its overall control performance is comprehensively superior to various traditional and state-of-the-art sliding mode control comparative methods including SMC. 28
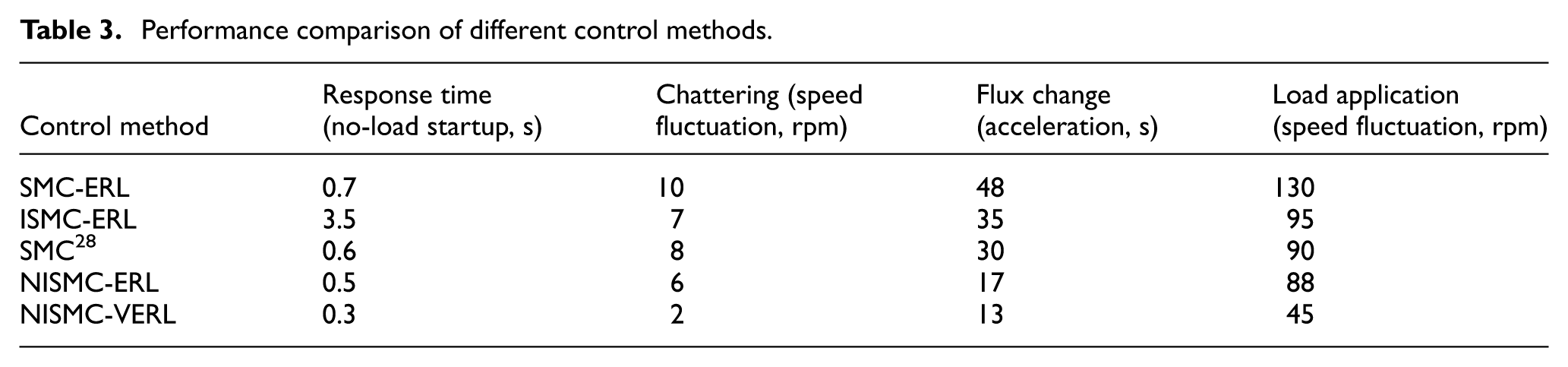
To further evaluate the control performance from the perspective of electromagnetic torque, this study also compared the q-axis current waveforms under different strategies. As the torque current component, the smoothness of the q-axis current directly reflects the chattering suppression effect of the controller and the torque ripple level of the system (Table 3).
Performance comparison of different control methods.
To better demonstrate the chattering suppression performance of different control methods, the experimental q-axis current waveforms are shown in Figure 5.
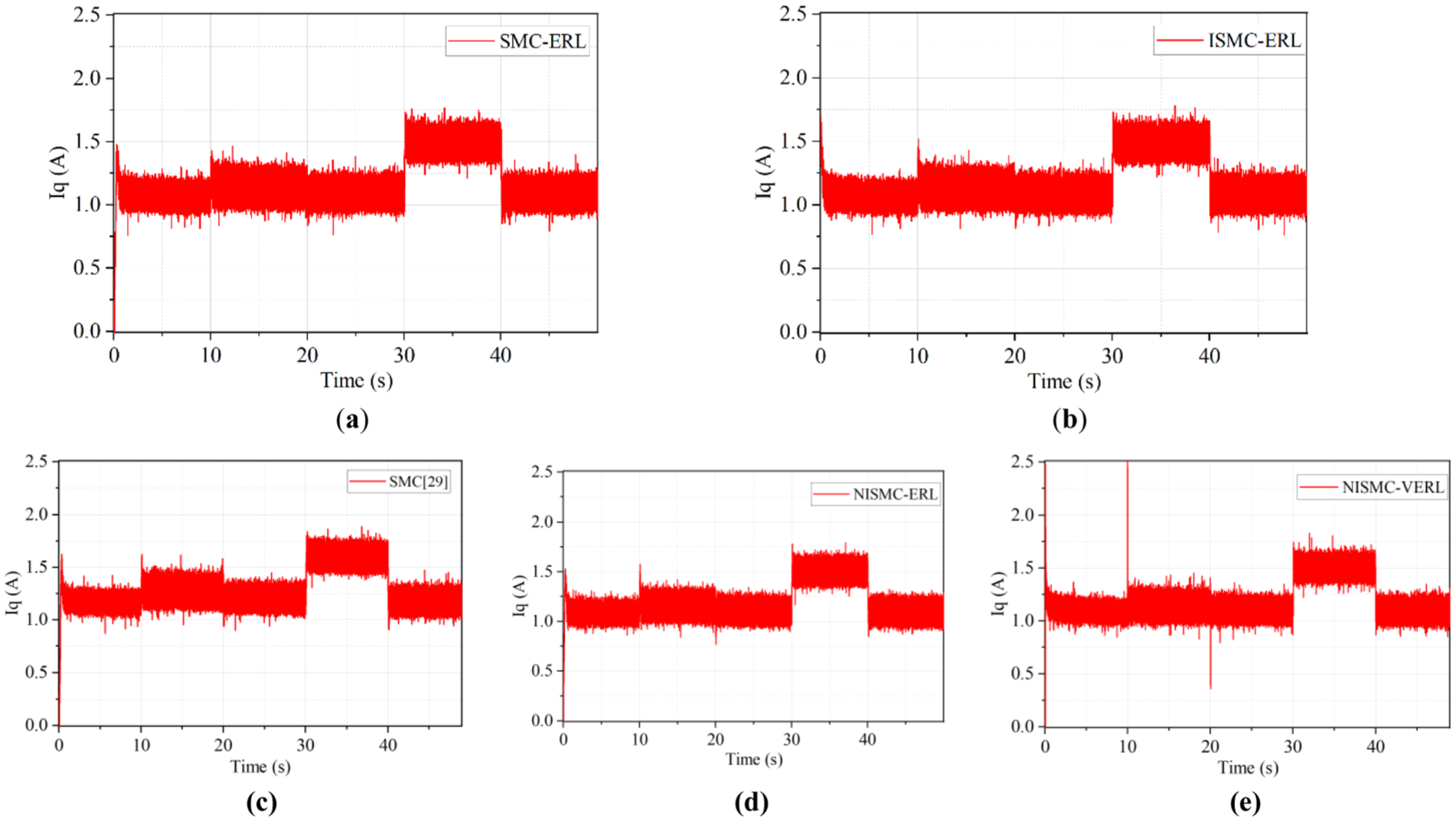
q-axis current. (a) traditional SMC-ERL; (b) ISMC-ERL; (c) SMC; (d) NISMC-ERL; (e) NISMC-VERL.
Figure 5 shows the experimental q-axis current waveforms under different control strategies. As the torque current component of the SPMSM, the waveform smoothness of the q-axis current directly determines the torque ripple level of the system, and is also directly related to the steady-state speed chattering characteristics, making it the core intuitive basis for verifying the chattering suppression performance of the sliding mode control strategy. From the perspective of waveform detail characteristics and quantitative fluctuation range, there are significant differences in the current output characteristics of each control strategy, which also form a one-to-one corresponding verification relationship with the speed control performance described above: the q-axis current waveform of the traditional SMC-ERL strategy (Figure 5(a)) presents continuous high-frequency and large-amplitude chattering with dense and persistent waveform glitches, and the current fluctuation range is always maintained at around ±0.8 A under full working conditions, which is the direct cause of the steady-state speed fluctuation of up to ±10 rpm for this strategy. The current waveform of the ISMC-ERL strategy (Figure 5(b)) is slightly improved due to the smoothing effect of the integral term, with the current fluctuation range narrowed to ±0.6 A, but there are still obvious periodic distortion and high-frequency oscillation, especially in the dynamic processes of sudden speed changes and load disturbances, the current waveform distortion is more prominent, corresponding to its steady-state speed fluctuation of ±7 rpm. The q-axis current waveform of the newly added state-of-the-art comparative method SMC 28 (Figure 5(c)) has a further narrowed chattering amplitude compared with the previous two traditional methods, with the current fluctuation range reduced to ±0.4 A and fewer waveform glitches, but there are still intermittent high-frequency spikes and continuous small-amplitude oscillation, which cannot achieve smooth current output under full working conditions, matching its steady-state speed fluctuation characteristic of ±8 rpm. The current waveform of the NISMC-ERL strategy (Figure 5(d)) further suppresses current chattering through the optimization of the nonlinear integral sliding surface, with significantly improved waveform regularity and a current fluctuation range of about ±0.3 A. However, the fixed exponential reaching law it adopts still cannot avoid the gain switching chattering in the region near the sliding surface, and continuous small-amplitude high-frequency fluctuations can still be seen in the waveform. In contrast, the q-axis current waveform of the NISMC-VERL strategy proposed in this paper (Figure 5(e)) presents an extremely high degree of smoothness overall, with the current fluctuation range suppressed to within ±0.1 A during the steady-state operation phase. Only transient, concentrated and amplitude-controllable pulse-like protrusions appear in the dynamic processes of no-load start-up, speed acceleration/deceleration and sudden load changes. These protrusions are not irregular random chattering, but targeted control actions generated by the variable exponential reaching law to adaptively increase the gain and quickly eliminate tracking errors when the system state is far from the sliding surface. Once the system state returns to the region near the sliding surface, the gain decreases smoothly, and the current quickly resumes a high level of stability. This characteristic not only ensures the fast dynamic response of the system, but also fundamentally weakens the inherent high-frequency chattering of sliding mode control, which is in perfect mutual agreement with the steady-state speed fluctuation of only ±2 rpm for this strategy. Through the qualitative comparison of waveform details and the quantitative analysis of current fluctuation range, this work fully resolves the inherent trade-off between dynamic response and chattering suppression in traditional sliding mode control, and intuitively verifies the remarkable superiority of the proposed method in torque ripple suppression and comprehensive control performance under full working conditions.
Conclusions
This paper successfully developed and validated an advanced NISMC-VERL framework incorporating a novel variable exponential reaching law for high-performance regulation of surface-mounted permanent magnet synchronous motors. The core contributions include:
(1) a sophisticated nonlinear sliding surface design that dynamically adjusts the integral action based on the error magnitude, effectively preventing integral windup while maintaining high precision;
(2) an innovative variable exponential reaching law that adapts the convergence rate according to the distance to the sliding manifold, achieving an optimal balance between rapid response and chattering suppression.
Experimental results demonstrate that the proposed NISMC-VERL strategy outperforms conventional methods across multiple key performance metrics, including transient response speed, disturbance rejection capability, and steady-state accuracy. This control scheme offers a viable solution for industrial drive systems that demand both high precision and enhanced robustness.
Future work will focus on extending the strategy to a wider range of industrial motor types and complex multi-axis drive systems, as well as exploring its integration with online parameter identification and intelligent learning algorithms to further improve the system’s adaptive capability and overall energy efficiency under full operating conditions.
Footnotes
Appendix 1
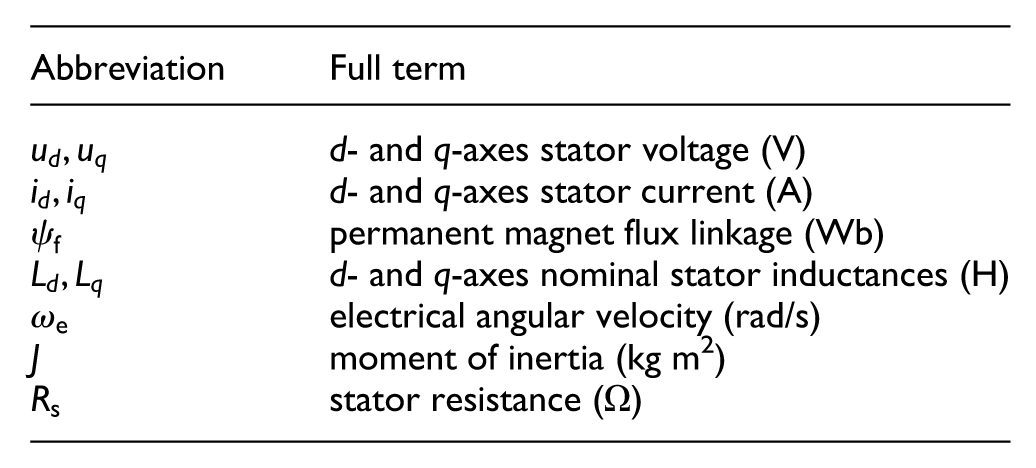
| Abbreviation | Full term |
|---|---|
| - and -axes stator voltage (V) | |
| - and -axes stator current (A) | |
| permanent magnet flux linkage (Wb) | |
| - and -axes nominal stator inductances (H) | |
| electrical angular velocity (rad/s) | |
| moment of inertia (kg m2) | |
| stator resistance ( ) |
Ethical considerations
This article does not contain any studies with human participants or animals performed by any of the authors.
Consent to participate
Not applicable. This study does not involve human participants.
Consent for publication
Not applicable. This study does not contain data from any individual person.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Major Science and Technology Project of Inner Mongolia Autonomous Region (Project No. 2020ZD0016): “Key Technologies Research of MW-level Advanced Flywheel Energy Storage”; and the Huaneng Group Science and Technology Project (Project No. HNKJ24-H117): “Research and Application Service Project on Key Equipment.”
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.