
Abstract
In the modern world, renewable energy sources are becoming increasingly important. Power quality (PQ) issues may arise, if these sources are incorporated in distribution system via power electronic equipment. This study handles PQ problems by considering a cascaded H-Bridge 5level converter-based shunt active power filter (SHAPF) integrated with a Battery Energy Storage System (BESS), Hydrogen Fuel Cell (HFC) and a Solar Energy System (SES) to the DC bus. The solar power is utilized to generate hydrogen, which is supplied to HFC to generate power. Here, A new modified red-tailed hawk (RTH) algorithm called as (MRTHA) is designed with the idea of escaping the prey to improve the overall performance of the RTH by avoiding the local traps, improving the global exploration and preventing premature convergence. The gain values of the proportional integral multi-resonant controller (PI-MRC), proportional integral derivative controller (PIDC) of SHAPF, boost converter (BOC), buck boost converters (BUBOC) in the HFC, SES and BESS are chosen optimally using MRTHA. However, this algorithm is also employed to compute the optimal resistance and inductance values for the shunt filter and BOC/BUBOC with an objective of minimizing THD, enhancing power factor while maintain DC bus voltage stable. Additionally, an efficient energy management is developed and validated under different types of loads, HFC tank pressure and PV irradiation conditions. Three distinct testing scenarios are used to assess the system’s performance, and the outcomes are compared with those achieved using Particle Swarm Optimization (PSO), Firefly algorithm (FFA), Biogeography-Based Optimization (BBO), and traditional three-level converters with proportional integral controller (PIC) and Fuzzy logic controller (FLC). The outcomes clearly show that the suggested approach achieves THD that is well within IEEE standards and lower than those of the other approaches. The technique was created with MATLAB/Simulink 2022b.
Keywords
Introduction
Motivation
The large incorporation of distributed generation into power systems has led to significant challenges in maintaining PQ, especially in terms of harmonic distortion, reactive power compensation, DC bus voltage stabilization and load balancing. To address these issues, a cascaded H-bridge five-level converter-based SHAPF with the MRTHA is engaged to optimally determine the gain values for the PI-MRC and PIDC presents a promising solution due to its superior harmonic mitigation capability with improved PF. Integrating BESS, HFC, and SES to the DC bus enhances the system’s stability. These energy sources not only support the SHAPF during grid disturbances but also improve overall energy efficiency and power continuity, especially during peak load or grid faults. This comprehensive and optimized control framework contributes to a stable, high-quality, and sustainable distribution network by integrating advanced power electronics with intelligent optimization and renewable energy sources. Besides, the majority of existing conventional metaheuristic algorithms show low sensitivity to toward control parameters. In addition, they may not always converge to the global optimum and stuck at local optima.
Literature survey
In order to meet the energy demands of the local load and facilitate EV charging at EV charging stations (EVCS), SES that connected to the power grid to improve PQ in association with a BESS. 1 A novel RTH was proposed by its hunting strategy of prey. The hunting process is divided into three phases. The RTH searches the search space and locates the prey during the high-flying stage. In order to determine the ideal hunting posture, the RTH enters the designated area surrounding the prey during the low soaring stage. 2 The UPQC compensator was then advised to use the hybrid energy source, which includes a FC), SES, BESS, Z-source, optimized with BBO. 3 Conversely, controllers based on artificial intelligence were created to successfully handle PQ problems. 4 In order to overcome PQ concerns, the modified-UPQC controller was created by modifying the gain parameters of the PIMRC utilizing PSO and black hole optimization. 5
A cascaded H-bridge multilevel inverter was selected as the basis for a shunt active photovoltaic filter, which removes electrical disturbances brought on by nonlinear loads and produces MPPT for PV generators. Furthermore, a P&O method for MPPT detection and a designed PLL to guarantee dependable operation in grid distortion situations are added to the p−q current identification technique. 6 In order to decrease losses, increase switch efficiency, and lessen voltage strain on devices, the innovative configuration was coupled with a series injection transformer and a DC-DC boost converter. 7 Next, four different compensators were used to improve the system’s PQ. A real-time benchmark dataset including several PQ issues, such as swell, interruptions, sag, and harmonics, was produced. 8 Next, a novel mathematical model was presented to regulate the flow of reactive power and voltage in a UPQC-controlled hybrid micro-grid. 9
Hybrid integrated renewable sources with BESS improves PQ in specific network with various topologies were presented. 10 A review is conducted of the new methods required to conduct research to improve the PQ in local distribution system. 11 Furthermore, the sport inspired algorithm has been selected to optimize gain parameters of PIC of UPQC PI controller to effectively address PQ problems. 12 Besides, the optimal development of UPQC associated with renewable energy sources by a novel optimization technique. 13 However, to choose FOPIDC parameters for THD reduction under variable loading situations, hybrid SHAPF was designed using hybrid PSO-Gray Wolf optimization. 14
Besides, in order to improve PQ indices, the PV fed universal SHAPF system was created. The power angle-controlled power balance theory mechanism was developed. 15 While, to solve the main PQ problems, including reactive power compensation, reducing source current THD, and enhancing PF, a three level Neutral Point clamped (NPC) VSC for SHAPF was presented. 16 Next, the PSO was adopted to adjust the SHAPF PI controller’s gain levels in order to regulate the DC-link’s voltage and improve its dynamic efficiency. 17 A phase angle vector model combined with an easy-to-tune PLL has been proposed to overcome PQ issues. EV charging stations generate nonlinear currents, which produces PQ issues and distorts and unbalances the distribution network. 18
A phase angle vector model combined with an easy-to-tune PLL was proposed to overcome PQ issues. EV charging stations generate nonlinear currents, which produces PQ issues and distorts and unbalances the distribution network. 19 A 3∅ grid-connected PV SHAPF, a q-LMF-based controlling strategy was used to construct a least mean fourth-based control based on quantum calculus. 20 Meanwhile, the SHAPF uses a finite-set model predictive control that is built on three parallel inverters that share a dc-link. Future grid, circulation, and offset current values are predicted using the system’s discrete-time model. 21 However, the current control of the SHAPF, a fractional order proportional resonant controller optimized by GA was presented; this structure is appropriate, has good coordination, and is compatible with the SHAPF system. 22 Meanwhile, for VADCBC balancing in SHAPF used a modified 11 level NPC converter was developed with PI controller and ANFIS. 23 On other hand, ANN, ANFIS methods were adopted to enhance the PF and reduce harmonics in power distribution networks with SHAPF. 24 The hybrid control technique with solar, fuel cell and BESS associated UPQC with EV charging load is developed to solve PQ problems.25,26 Besides, modified water wave algorithm was adopted to optimize the gain values in order to improve the PQ and power management in micro grid. 27 Next, the design of hybrid green energy storage system was modeled for the real-world applications. 28
A novel investigation was carried with multi-time scale optimization of energy systems based on flexible load response techniques to reducing operating costs. 29 Besides, a novel FOPTC technique was applied for correct MPPT under dynamic changes of meteorological conditions. 30 A reliable model was developed to predict the electricity consumption data of distributed photovoltaic power stations, by adopting indirect prediction method to forecast the sun irradiance. 31 A federated transfer learning method was suggested for data-driven knowledge transfer across clients with data privacy. 32 A novel intelligent method was developed for state of charge prediction with a self-supervised Informer network. 33 A few-shot transfer learning strategy is proposed for aligning feature distributions between different SOH domains using limited labeled data to establish a real-world second-life EV battery aging dataset, that is, UCSD-XJTU-Nissan dataset 34
Novelty and contribution
Table 1 makes it evident that the research articles in literature mainly emphasis on SHAPF in conjunction with SES and BESS. These studies looked into various control strategies to improve PQ. But they failed to consider the hydrogen energy produced by renewable sources, multi-level converters, as well as selection of the controller, filter, BOC, and BUBOC parameters using novel modified meta-heuristic algorithms. The following main points underline the paper’s novelty:
Algorithmic Improvement: Design of a novel modified RTH algorithm (MRTHA) by adopting escaping of prey to enhance the overall algorithm performance by escaping from local optima, improves global exploration and prevents premature convergence. This allows MRTHA to achieve superior convergence stability compared to PSO, FFA and BBO algorithms.
Green Hydrogen Energy: Development of green energy HFC connected to DC bus. Solar power is utilized for the production of hydrogen energy, which is then fed to HFC for the production of power.
Control Strategy: Selection of optimized PI-MRC for signal generation of 5Level cascaded H-Bridge converter for SHAPF. While the PIDC is utilized for harmonic suppression, VADCBC regulation, and control of BOC and BUBOC converters.
Optimization Implementation: Application of MRTHA for the appropriate selection of gain values of PI-MRC, PIDC along with filter and BOC/BUBOC control parameters with an objective of reducing THD in the source current, while boosting the PF.
Solar, HFC and Storage Integration: The integration of HFC, BESS and SES offers support in satisfying the demand and helps in reducing burden on converters. Fluctuations in solar radiation (G), FC pressure, and different types of loads like EV charging station, nonlinear sensitive and asynchronous motor etc are considered in case studies to show the performance.
State of art of literature.
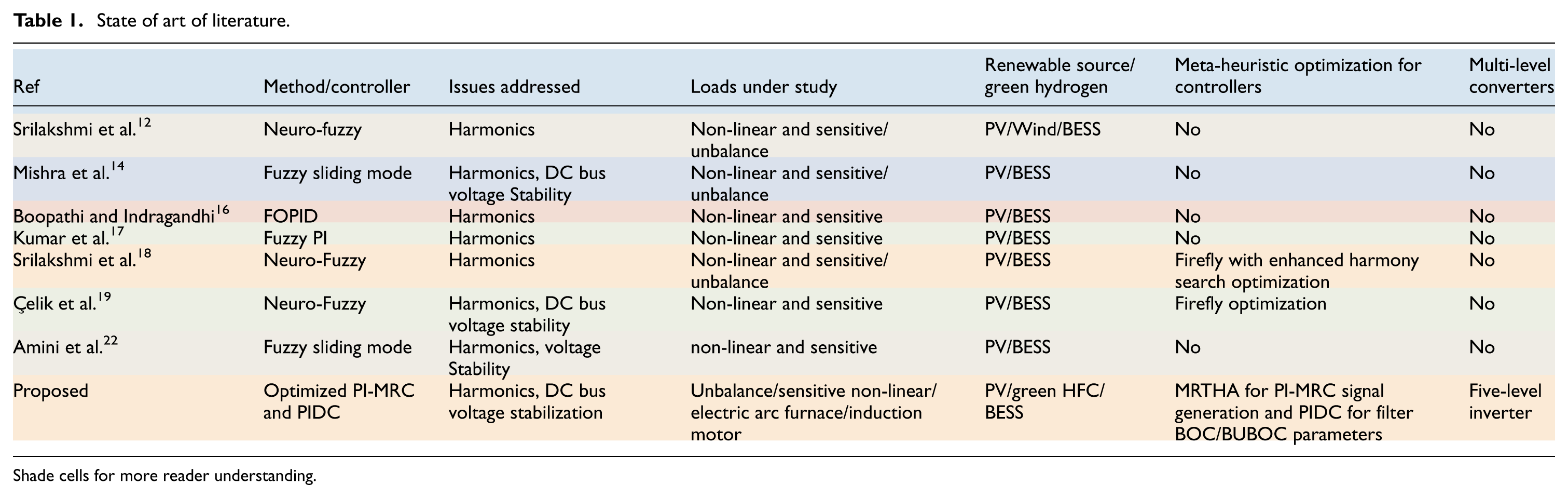
Shade cells for more reader understanding.
The paper is structured in the subsequent manner: Section II gives the modeling of system components and sources; Besides Section III focuses on controller mechanism and developed MRTHA algorithm employed in this research. Section IV provides the findings and corresponding discussions. Section V concludes the manuscript with further research within this particular domain.
Configuration of developed system
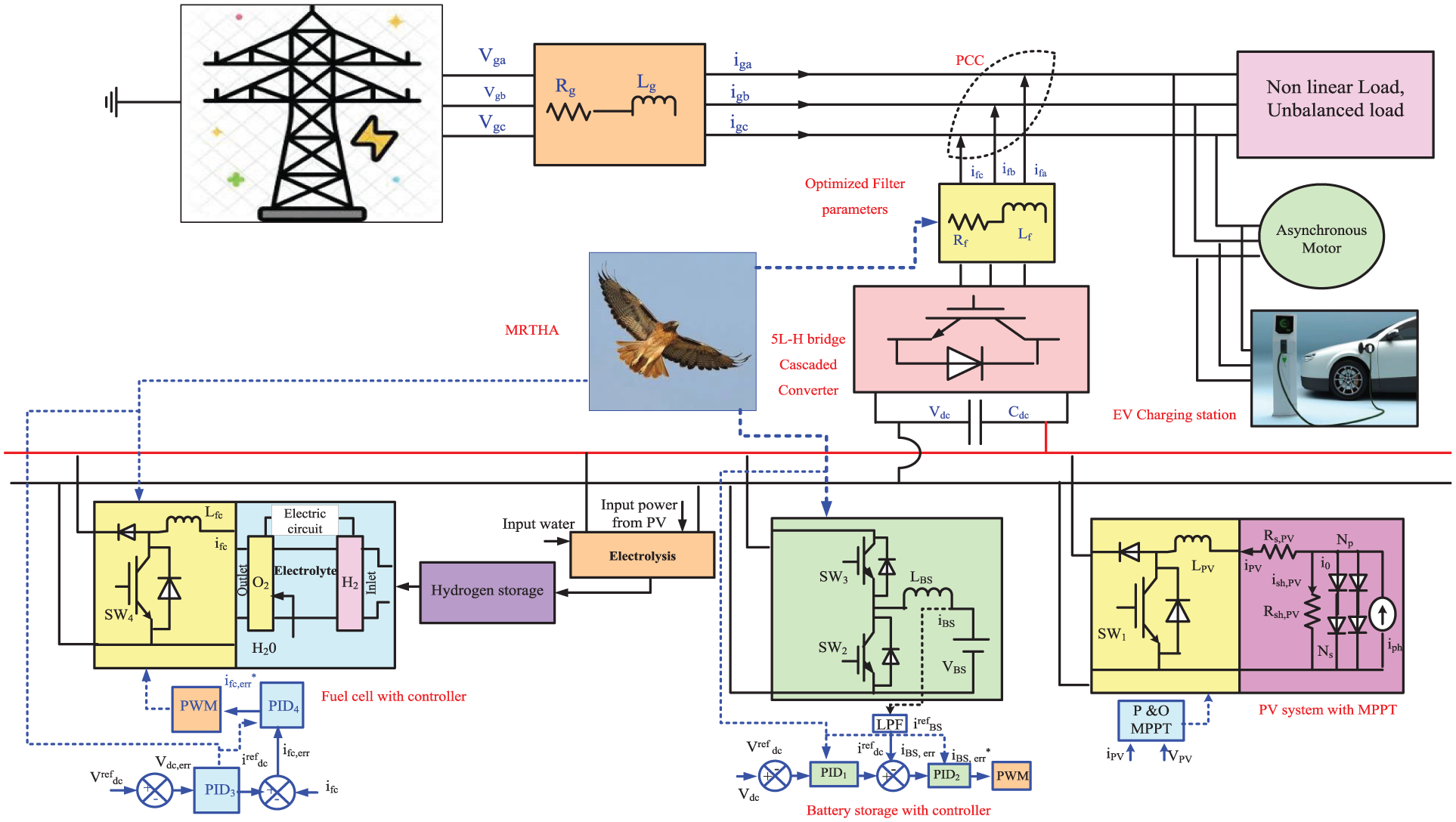
The shunt converter is attached to the PCC, functions as a current compensator. Figure 1 illustrates the schematic layout of the developed system. The proposed system consists of a cascaded H-Bridge five-level converter-based SHAPF connected to the distribution grid. The SHAPF maintains stability in VADCBC and suppress the harmonic content by adding compensating currents. The DC bus of the SHAPF is interfaced with three complementary energy sources: (1) SES: A PV array with a BOC extracts maximum power under varying irradiation conditions, (2) HFC: A green hydrogen (generated from the PV) based fuel cell with its own BUBOC provides continuous support, especially during low solar output or high demand conditions, and (3) BESS: Connected via a bidirectional BUBOC, the BESS stabilizes the DC bus voltage, and provides backup support.
Structure of developed SHAPF.
The main limitation of conventional converters is large content of harmonics which results in requirement of large filters leads to higher cost. However, multilevel converters produce a leveled output with reduced both cost and size of filter. In multilevel inverters, the H Bridge cascaded structure works without clamping diodes. Figure 2 provides the 3φ 5L configuration of a converter, while the corresponding switching sequence is presented in Table 2.

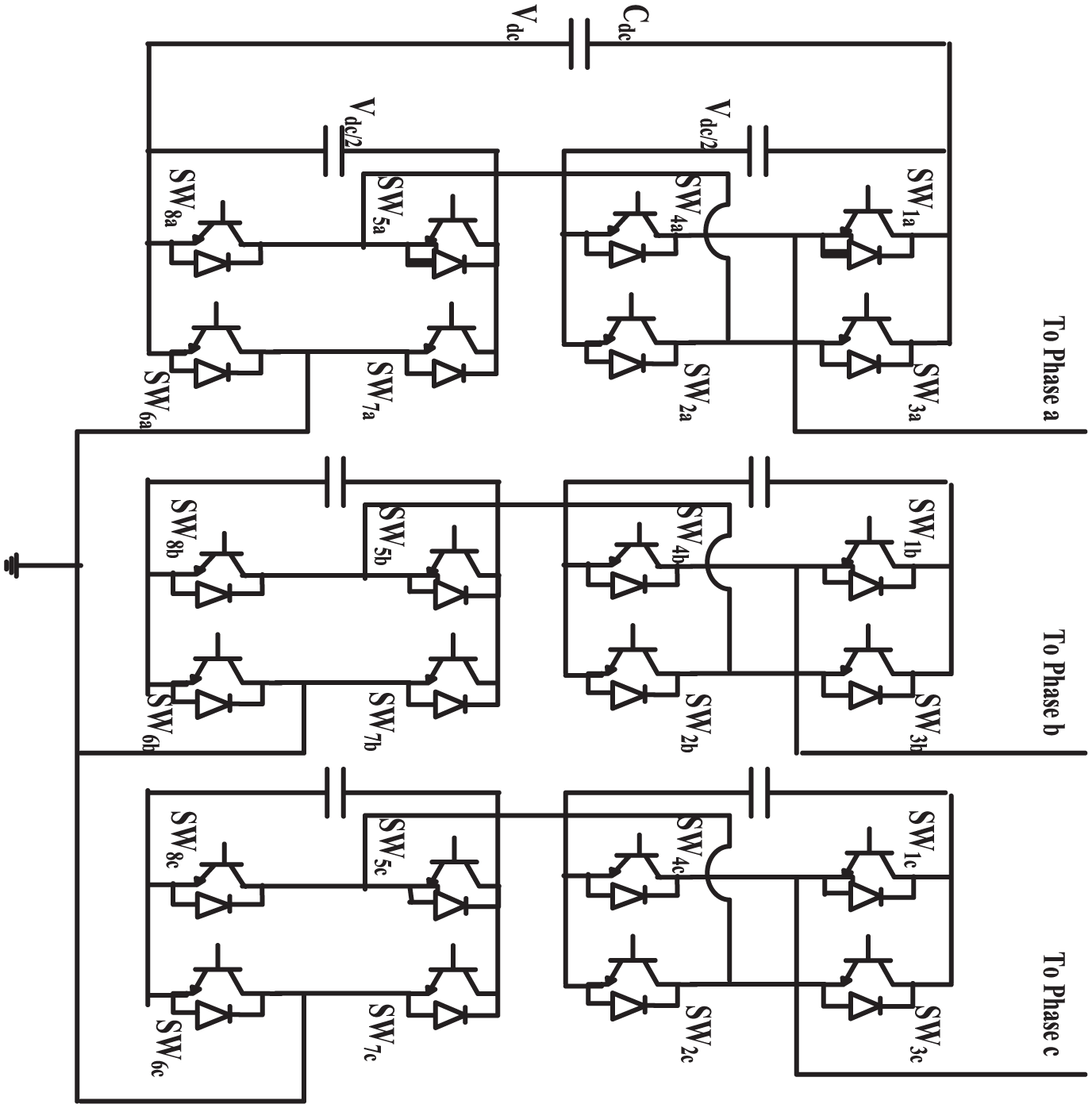
Three phase 5L cascaded H bridge VSC configuration.
5L cascade H-bridge switching.
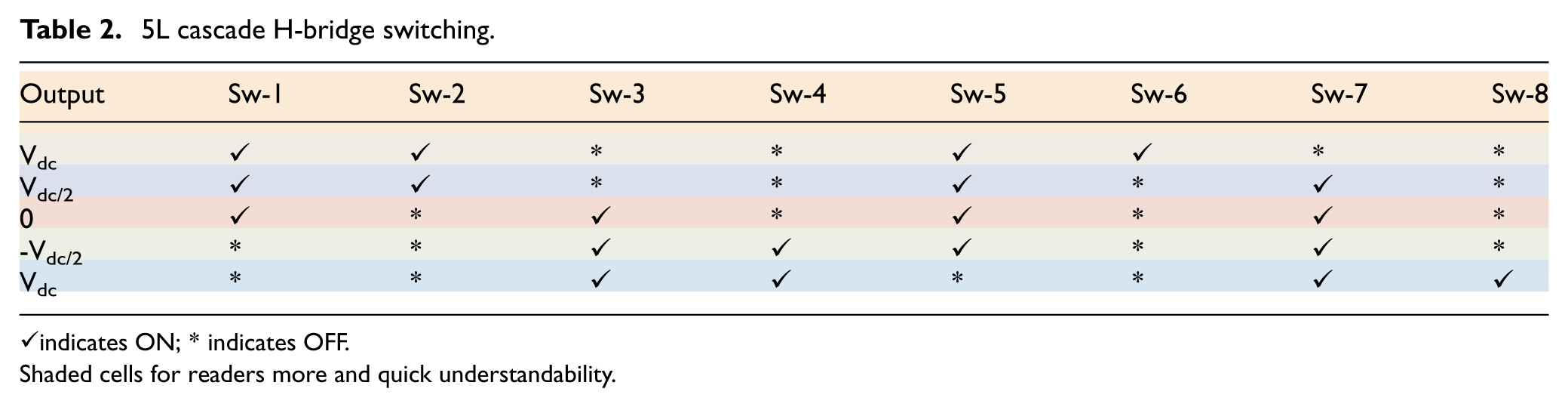
✓indicates ON; * indicates OFF.
Shaded cells for readers more and quick understandability.
Equation (1) is used to calculate the power flow. The rule-based power sharing logic considered in this work is given in Table 3 which effectively address the transient response through coordinated control of fuel cell and BESS for PQ enhancement.
Power distribution.
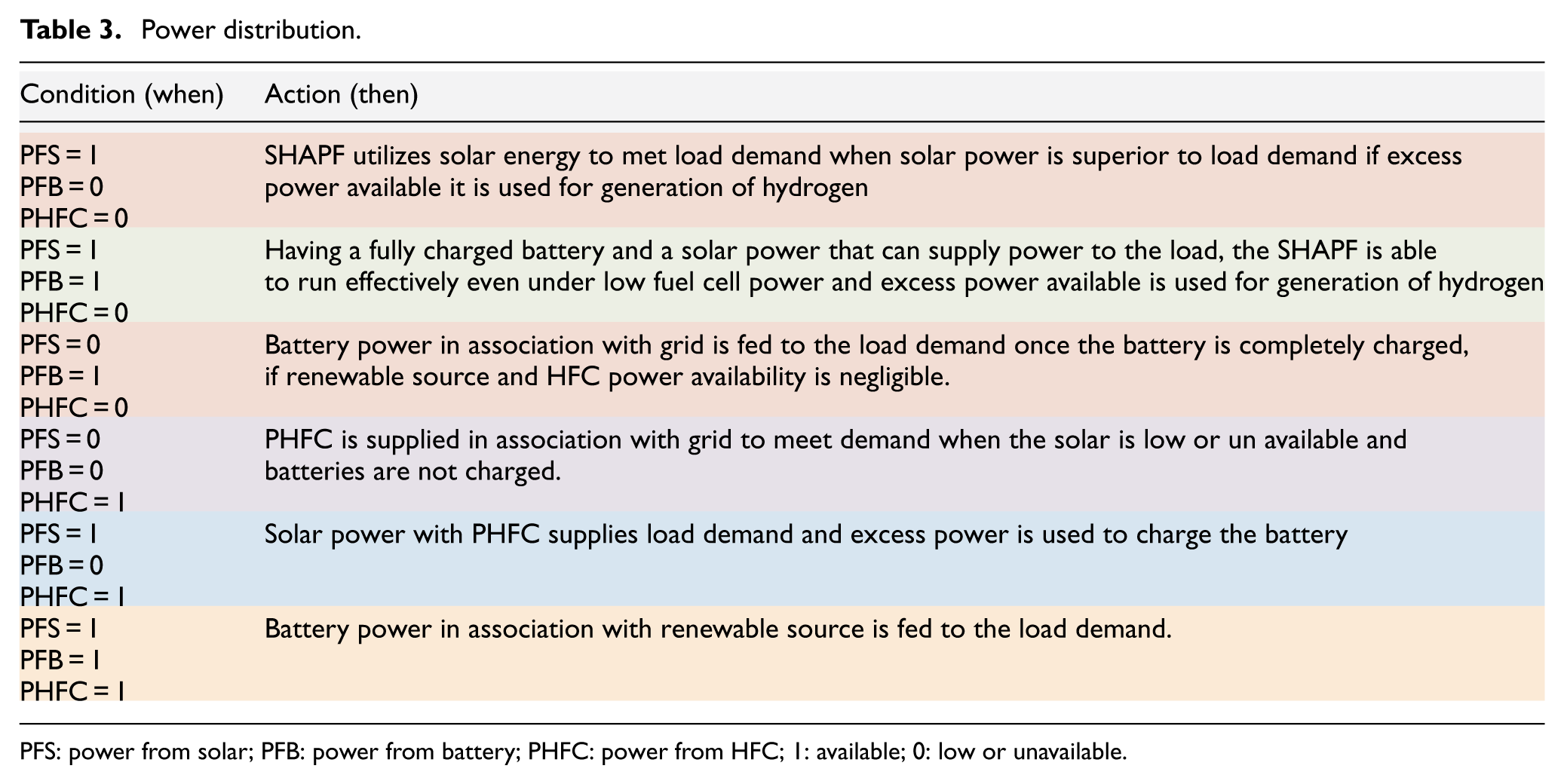
PFS: power from solar; PFB: power from battery; PHFC: power from HFC; 1: available; 0: low or unavailable.
Modeling of SES
In SES light energy is converted into electrical energy. The desired voltage and current can be achieved by arraigning modules of PV in parallel and series combination. Figure 1 depicts the representation PV model. The equations for the PV current, photo current 24 are exhibited in the equations (2)–(6).





Here, I ph resembles photocurrent, t as temperature and G as sun irradiation. The R se signifies the internal series resistance with current I, while the shunt resistance characterizes i sh , P v flow representing a leakage current.
Modeling of green hydrogen system and HFC
Green hydrogen energy systems produce hydrogen through electrolysis. In this process water is divided into hydrogen and oxygen by taking electrical energy generated from renewable source.
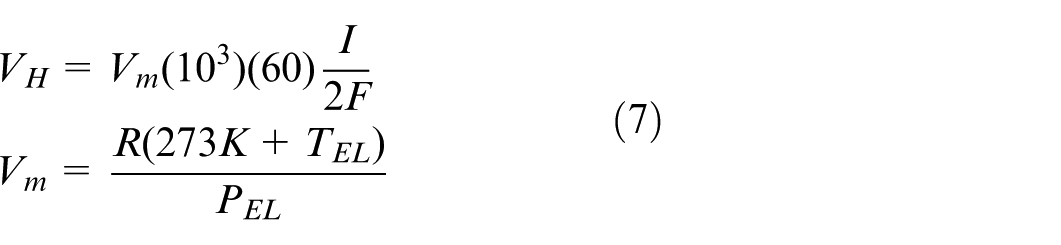
The total of hydrogen generated by electrolyzer depends on the current drawn 28 and the molar volume of hydrogen given by equation (7). The tank storing hydrogen energy produced from electrolyzer modeled 28 in the system are purely mathematical and do not replicate any of the specified tank systems. The hydrogen is converted into electrical energy by the HFC 28 given by equations (8)–(11) .




Here, En is the electromotive force generated by FC, E
oc
resembles open-circuit voltage, E gives the activation loss, ohmic losses with resistance R
ohm
and V
fc
is the fuel cell voltage. The FC controller with boost converter is depicted in Figure 1. By using PIC in the equations (12) and (13), the reference current


According to equation (14), the PI controller uses the FC error current

Here,

Modeling of BESS
The BESS plays a significant role in satisfying load demand. Batteries, consists of cells which are arranged in parallel and series combinations to achieve desired output voltage and current. It also helps in stabilizing DC bus voltage. In this work the Li-ion battery is selected due to its benefits like low maintenance, slow discharge. The SOC and its boundaries of this state determine whether to charge or discharge. The major equation used in the design of the battery model is in equation (16) 27 :

Where, K denotes the polarization constant (V/Ah), V B denotes the voltage of the battery, it is battery charge (actual), E 0 is the battery constant voltage, R b is battery internal resistance (Ω), q is the battery capacity (Ah), Y is exponential zone time constant inverse (Ah-1), i B is battery current that is filtered (A).
Designing parameters of SHAPF
The prime function of SHAPF is to provide the suitable appropriate current using equation (17) to make the grid current distortion free.




Here, i g , i l , i f , V m , V g , and P L stand for grid, load, and SHAPF compensated current, maximum, grid voltages, and load terminal power. Equation (21) provides the numerical value of the DC capacitor C dc .

Here,

Control system with MRTHA tuned PI-MRC and PIDC
SHAPF helps to stabilize VADCBC and minimize current signal distortions by supplying suitable filter current. The recommended technique provides: (i) MRTHA optimized PI-MRC was selected to produce reference signals (ii) In addition to the filter parameters, BOC, and BUBOC parameter were also optimization. Besides, MRTHA is used for gain value selection of PIDC for SHAPF, FC, and BESS in order to accomplish the objective of lower THD.
The SHAPF serves two purposes: it provides solar power to maintain a constant VADCBC during load changes and compensates for harmonics in current signal, increasing PF. The shunt 5l H-bridge cascaded converter can (i) convert the abc-dq0 and dq0-abc domains, and (ii) generate reference signals using MRTHA-optimized PI-MRC.
Using PLL, the grid voltage phase/frequency information is used to transfer the load current into the dq0 domain. After comparing the DC-link voltage to the reference voltage, the MRTHA-based PIDC transforms the error voltage into the necessary current change to control the V dc . The error current signal obtained from the optimally constructed PIDC is added to the load current of the q-th component. However, as illustrated in Figure 3 to generate the proper gate pulses for shunt VSC, the dq0 domain is once again transformed to abc phase and compared with the actual load currents in an MRTHA optimized PI-MRC.
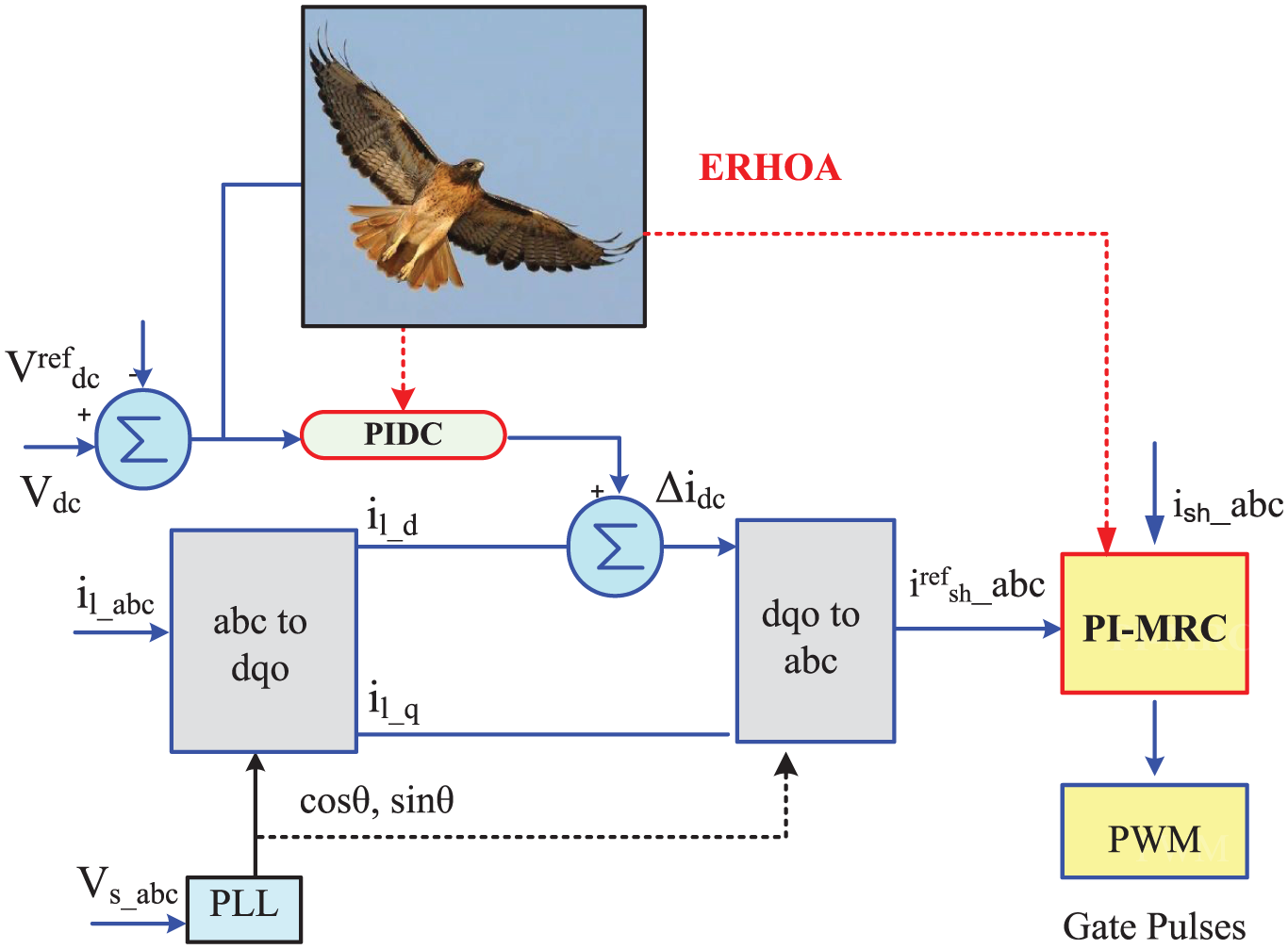
Proposed MRTHA with PI-MRC and PIDC shunt converter.
PI-MRC and PIDC
The integrated PI-MR controller 5 is a hybridization of a PI and a resonant condition, the transfer function (TF) of PI-MR is given by:
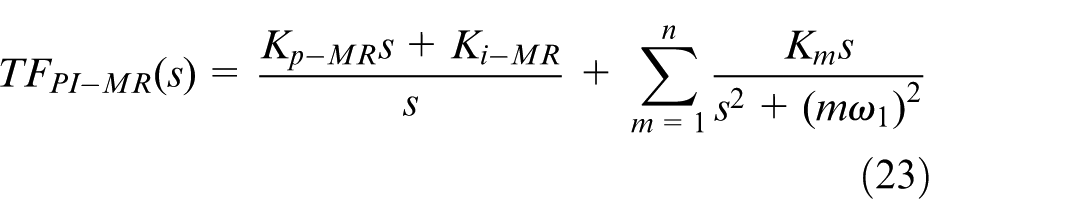
Where,
A PIDC is a feedback based control mechanism commonly used to manage system and processes that require continuous control and automatic adjustment. The transfer function of the PID controller is hereby written as:

RTHA
Deserts, grasslands, woods, agricultural fields, and urban areas are just a few of the habitats and altitudes where the red-tailed hawk (RTH) can be found. The RTH is a carnivore and predator. With minimal flapping to conserve energy, the RTH soars with its wings in a slight dihedral. This characteristic allows the red-tails to fly farther than other hawks. Soaring is used more often since it is the most effective flight mode for these hawks. The algorithm’s mathematical model 2 is examined. The proposed algorithm simulates the hunting strategy of RTH. Each hunt stage’s behaviors are demonstrated and emulated. The three stages of this algorithm are stooping and swooping (SS), low soaring (LS), and high soaring (HS).
HS
In order to find the optimum spot for food availability, the RTH will fly high in the sky. It flies highly with its wings in a mild dihedral, flapping as little as possible to save energy to explore the selected area. The RTH behavior at the HS stage is illustrated in Figure 4(a), and the mathematical model is given by equation (25):

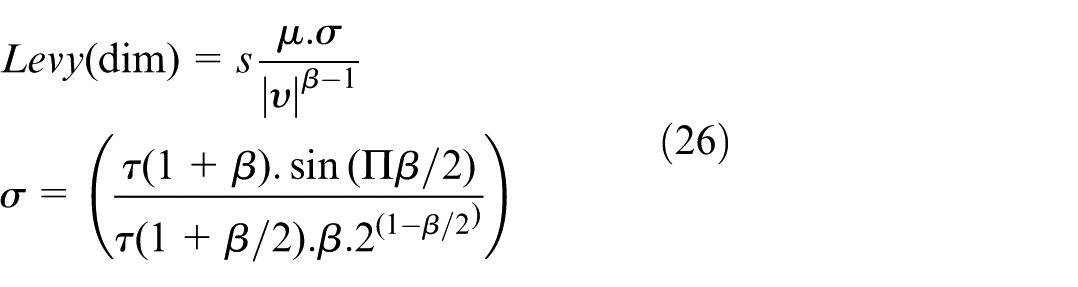
Where, P best is the best position, P mean is the mean position, and P(t) is the red-tailed hawk position at iteration t. TF(t) indicates the function of transition factor that can be computed using equation (27), while Levy stands for the levy flight that can be computed using equation (26).
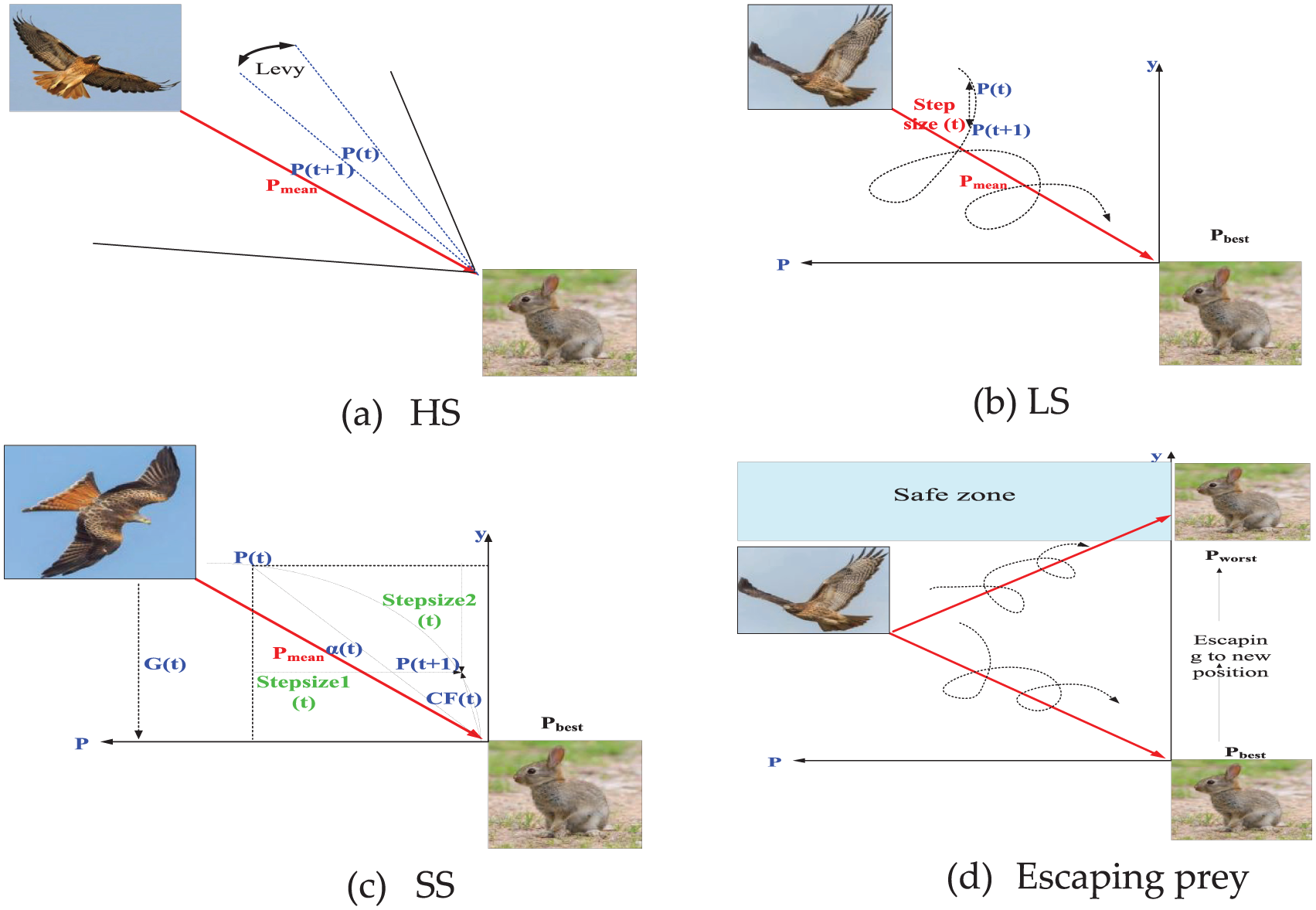
Behavior of MRTHA during different stages. (a) HS, (b) LS, (c) SS, and (d) Escaping prey.
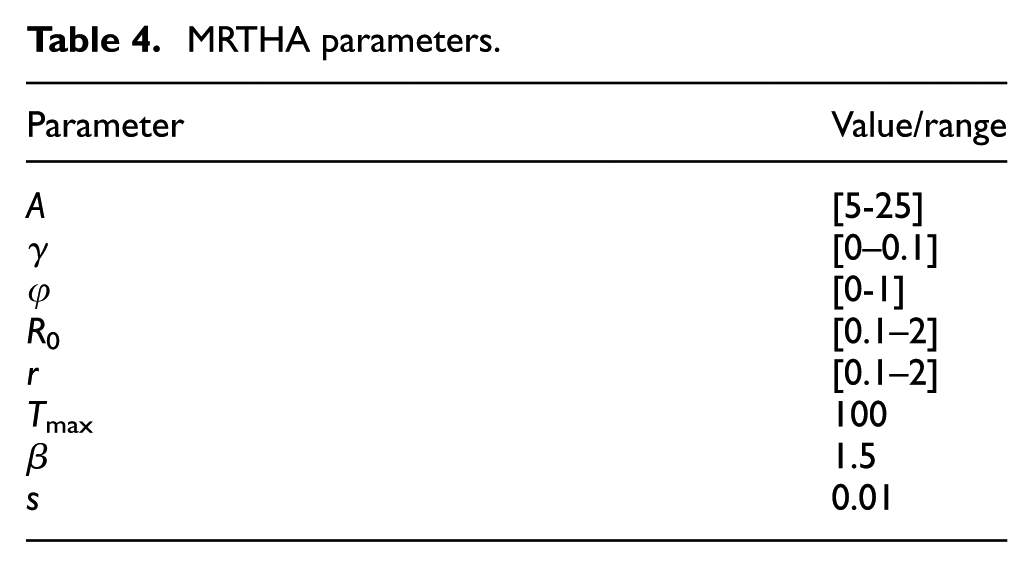
Here, u and υ are random numbers lie in between [0 to 1], dim is the problem dimension, β is a constant whose value selected as 1.5, and s indicates a constant (0.01).

Where, T max gives the maximum iterations.
LS
After selecting the target position, RTH flies in a spiral line, considerably lower to the ground, around the prey. This movement allows it to detect the best location and time to hit the target. The model for this stage, which is depicted in Figure 4(b), is as follows:


Where, p and y resemble direction axis evaluated as:

Here, A, rand, r are the angel, random, control gains whose values lies in between [5–25], [0–1], [0.1–2], and R0 indicates the beginning value of the radius [0.1–2].
SS
At this point, the hawk abruptly lowers itself and strikes the prey by stooping and raising its acceleration (from 32 to 64 to 190 km/h) in a curved direction from the best position and moment in the previous step it was able to secure during the LS phase. The behavior of the RTH at this time is explained in Figure 4(c). The following is a model for this stage:

Here, each step size is evaluated by equation (25):

Where, α and G are acceleration and the gravity factors which are given by:

Where, α is RTH acceleration factor that rises as t in turn boosts the convergence speed.
Proposed modification of RTHA
Escaping of prey
Predation is a complicated relationship between the morphologies, sensory capacities, behavior, and decision-making of the predator and the prey. Predator and prey’s relative kinematic abilities, the pursuit and evasive trajectories they use, and the moment they recognize one another all affect the dynamics of prediction. Camouflage, anosmatic signaling, armor, aggressive displays, evasion, and even interfering with predator senses are just a few of the many different ways that prey’s defend themselves. Generally, the preys flee away from predators by turning with high radical acceleration toward safety zone. The above modeled algorithm considers only the best attacking strategy by following the best position, denoted by the best member having the largest fitness in the population shown in Figure 4(d). It does not account the escaping strategy of prey, during the RTH’s attack. The preys attempt to reach the safety zone, that is, a position denoted by the worst member having the lowest fitness in the population. Consequently, the RTH has to slightly alter the attacking strategy by moving toward the worst position during LS and SS stages. Equations (28) and (31) are modified to change the direction of attack toward worst solution by


The RTH changes the direction of attack only if the prey senses the attack and flee away from the initial position. This happens less frequently. The equations (28) and (31) and equations (34) and (35) are controlled by a switching factor γ (range of 0–0.1) with lower probability. The “escaping of prey” concept in MRTHA is a computational strategy that avoids the premature convergence, thereby finding the global best optimal controller parameters that improve both PQ and VADCBC settling time. The parameters of the MRTHA is given in Table 4
MRTHA parameters.
Pseudo code
Initialization: randomly generate RTH
While t <Tmax do
HS: for i=1: Number of population do
Compute Levy flight by Eq (26)
Compute the TF by Eq (27)
Update the position by Eq (25)
End
LS: for i=1: Number of population do
Compute the p(t), y(t) by Eq (30)
Compute the step size by Eq (29)
Generate a random Number φ in the range of (0,1)
If φ >γ, Update positions by Eq (28)
Else Update positions by Eq (34)
End
End
SS: for i=1: Number of population do
Evaluate the G, α by Eq (33)
Compute the step size by Eq (32)
Generate a random Number φ in the range of (0,1)
If φ >γ, Update positions by Eq (31)
Else Update positions by Eq (35)
End
End
End
In order to achieve a global optimal solution with rapid convergence, the control variables are adjusted. The filter, BOC, and BUBOC parameters, as well as the PI-MRC and PIDC gain levels, are regarded as the problem variables in this instance. The lower and upper bonds values for gains of PID controller and resonant gains K1-K13 are considered as 0.0001–100 while passive elements like resistors and inductors as 0–0.5 and 0.01–10 respectively. Therefore, as stated in equation (36), each RTH in MRTHA is displayed to show the variables at concern.
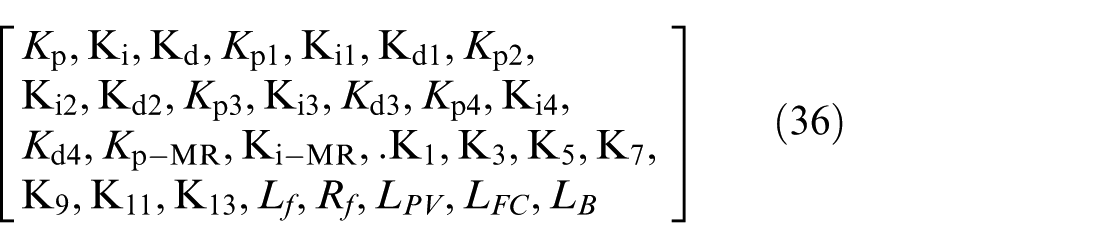
The fitness (F) is given in equation (37).
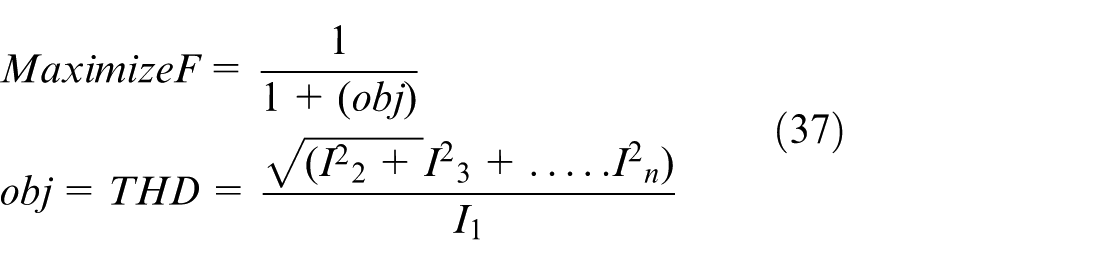
Where, I n and I 1 resembles the current fundamental and harmonic components.
Results and discussions
A 3φ distribution network was used for this study in order to assess the suggested methodology. Literature studies generally optimize either PI/PID gains or filter parameters separately using metaheuristic algorithms. This research develops MRTHA to optimize (1) PI-MRC gains for five-level cascaded H-Bridge converter signal generation, (2) PIDC gains for harmonic suppression and DC bus voltage balancing, and (3) Passive elements and converter parameters (BOC/BUBOC). This holistic optimization framework is the novel contribution of the work. The proposed system with controller was developed in MATLAB/SIMULINK 2022b.
The Appendix provides the specifications for the overall system configuration. Three distinct test cases with varying loads and source of power generation fluctuations from the SES and HFC were selected in order to evaluate the method’s efficacy. Table 5 contains the specifics of the case studies that were utilized to assess the suggested system. Furthermore, as indicated in Table 6, the THD of the created system was assessed for each test scenario and compared with the traditional methods using PIC, FLC, PSO, and BBO. Figures 5 to 7 show the waveforms that were produced for case studies 1–3.
Test case under study.
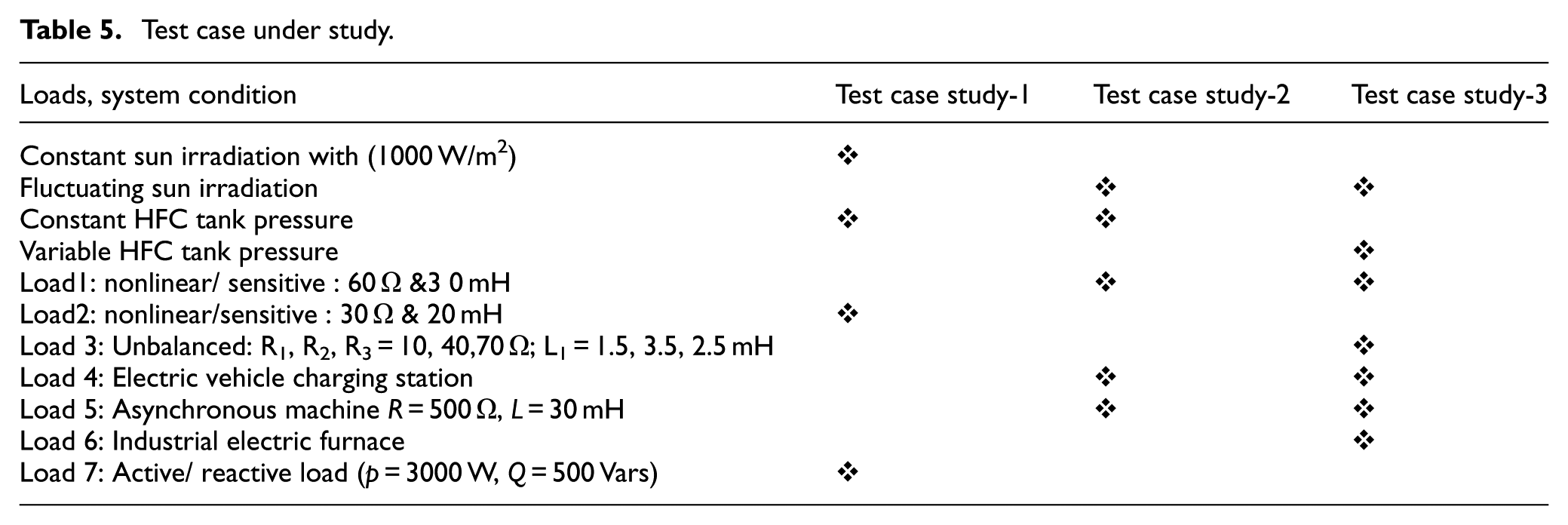
%THD.
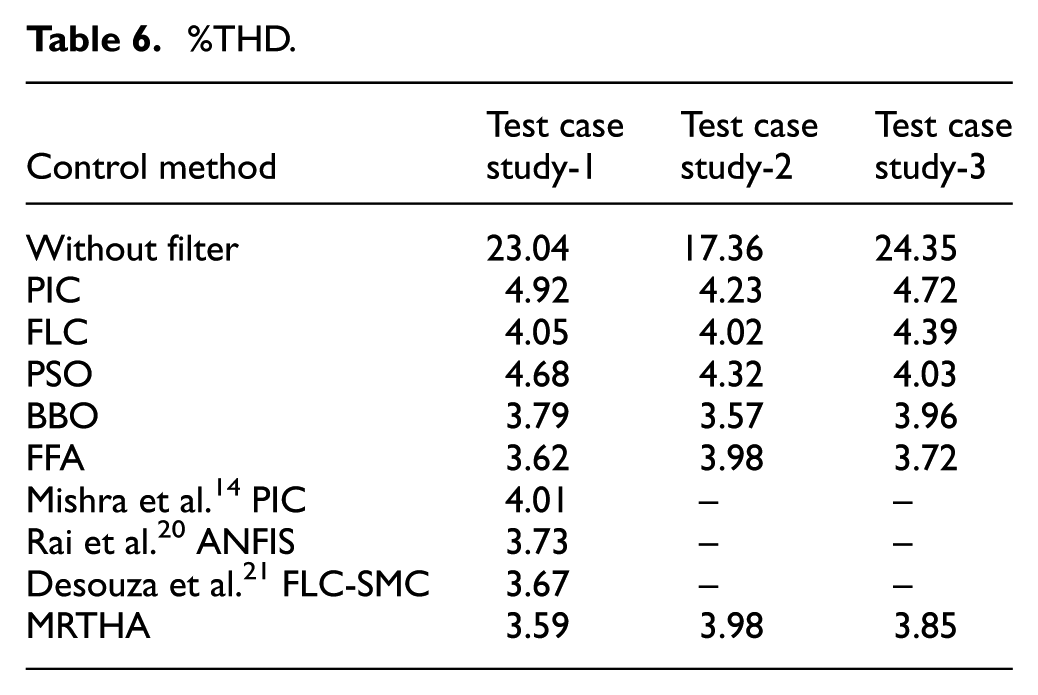
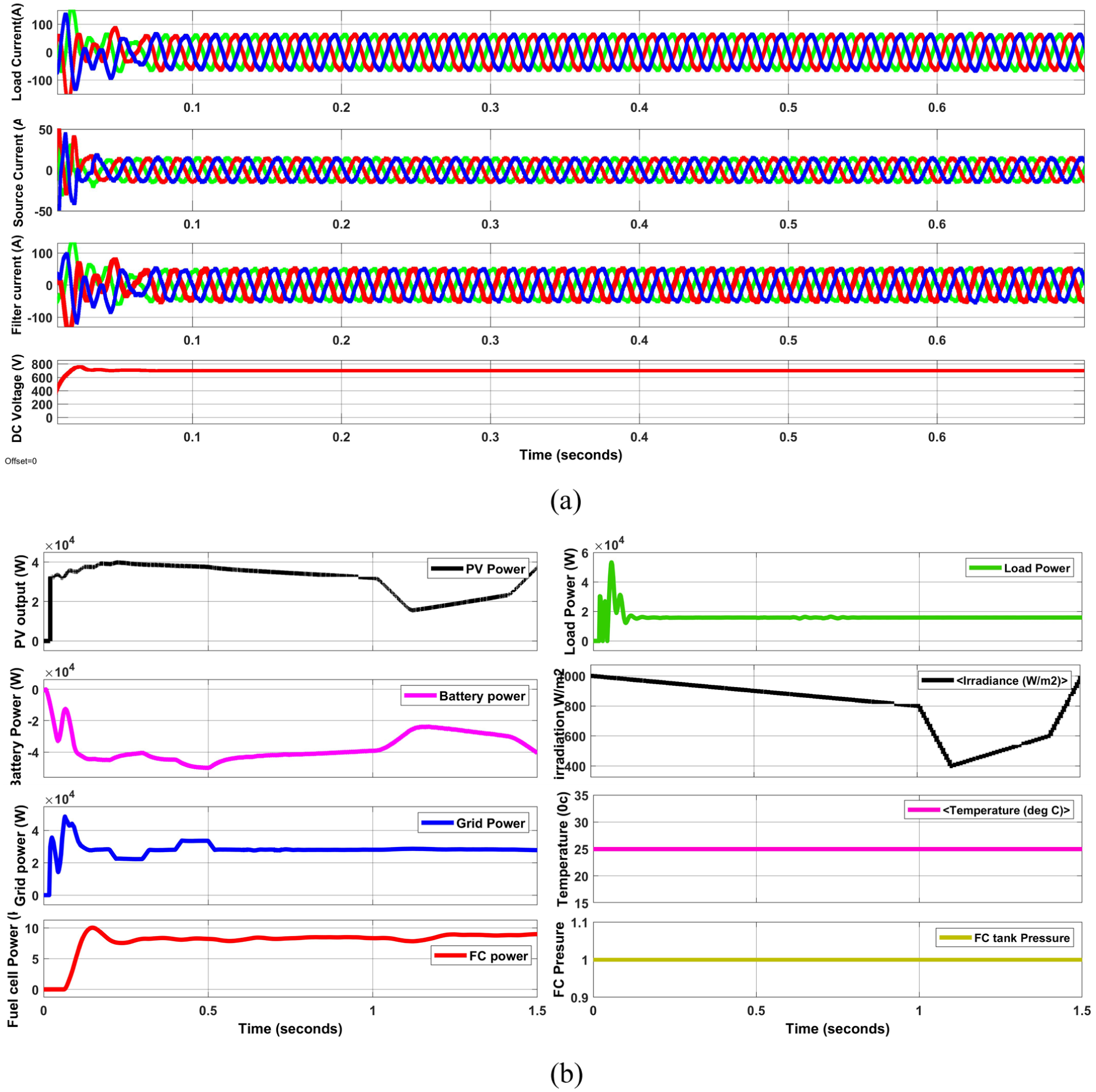
Waveforms for case1. (a) Load, source, filter currents, DC bus voltage. (b) PV power, battery power, grid power, HFC power, Load power, G, T, FC tank pressure.
Waveforms for case2. (a) Load, source, filter currents, DC bus voltage. (b) PV power, battery power, grid power, HFC power, Load power, G, T, FC tank pressure.

Waveforms of case3. (a) Load, source, filter currents, DC bus voltage. (b) PV power, battery power, grid power, HFC power, Load power, G, T, FC tank pressure.
The load current is non-sinusoidal and distorted, but it is balanced in case 1 when loads 2 and 7 are considered, with a THD of 23.04% and a PF of 0.807. The suggested approach effectively controls the harmonics in the supply current, as shown in Figure 5(a). Table 5 demonstrates a notable decrease in THD in the current waveforms. In comparison to other traditional approaches and published methodologies, the PF improved to 0.993 and the THD dropped to 3.59% by supplying the proper filter current. The performance of the suggested approach in power management in addition to PQ enhancement is illustrated in Figure 5(b), which shows the PV and HFC powers with grid powers under constant HFC tank pressure and irradiance. Furthermore, this technique takes less than 0.06 seconds to produce a steady VADCBC.
As shown in Figure 6(a), the combination of loads 1, 4, and 5 in case study 2 produces a highly harmonic polluted and distorted load current. In the absence of a SHAPF, the PF is 0.885 and the THD is 17.36%. By injecting appropriate filter currents to minimize the waveform distortions, Figure 8 shows how effectively the MRTHA optimized controller delivers current free from harmonics. This method increased the PF to 0.989 and decreased the THD of the load current to 3.98%. Furthermore, Figure 6(b) demonstrates that stable HFC tank pressure and variable irradiance were taken into account. It is clear that the MRTHA optimized PIDC rapidly stabilizes the VADCBC at a consistent level, even in the presence of changes in solar and wind power. Similarly, MRTHA optimized PI-MRC produces the reference signal inturn PWM produces suitable gate pulse. Besides, with the grid’s assistance, power management was also successfully managed, guaranteeing a consistent supply of electricity to the load.
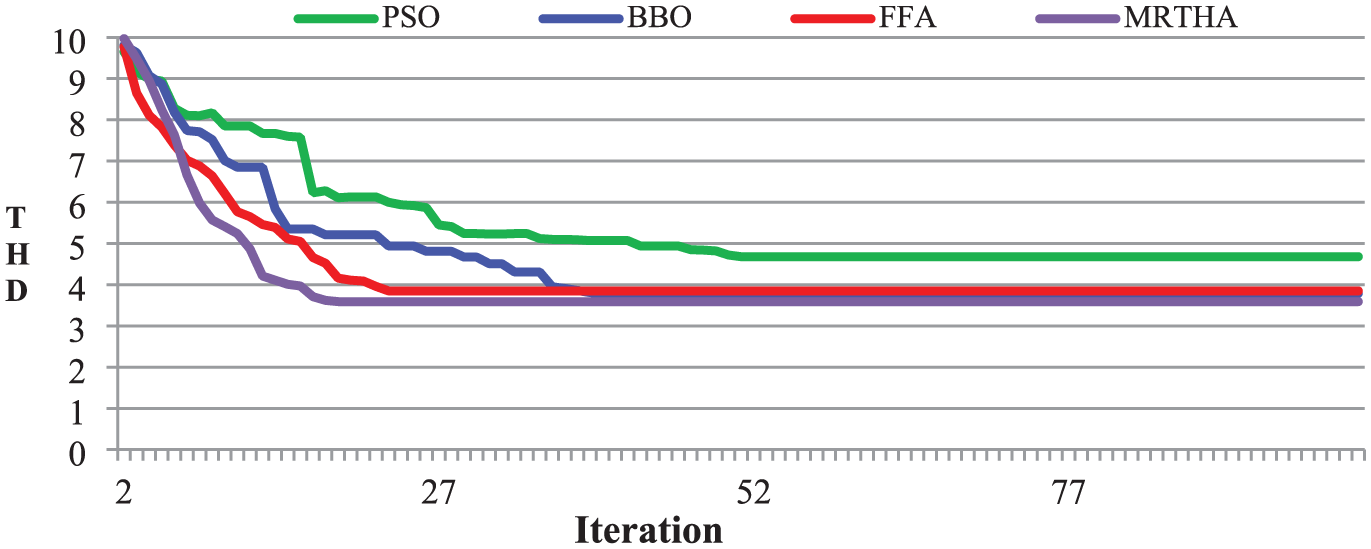
Plot of convergence for case-1.
A similar pattern of rising PF and falling THD is shown in case 3. Up to 0.4 s, the load current displays a non-sinusoidal waveform as a result of loads 1, 4, and 5. When loads 3 and 6 are coupled at that point, the additional loads result in an increase in current magnitude and a non-sinusoidal waveform with unbalanced phases. The efficiency of the developed method in repairing the imperfections in the current waveform is shown in Figure 7(a). It is clearly visible that due to change in load the DC bus voltage varies but within a short period of period it reaches to 700 v, which is effectively handled by the BESS. Furthermore, Figure 7(b) demonstrates that the suggested method provides outstanding power control performance by successfully maintaining VADCBC stability under a range of irradiation situations.
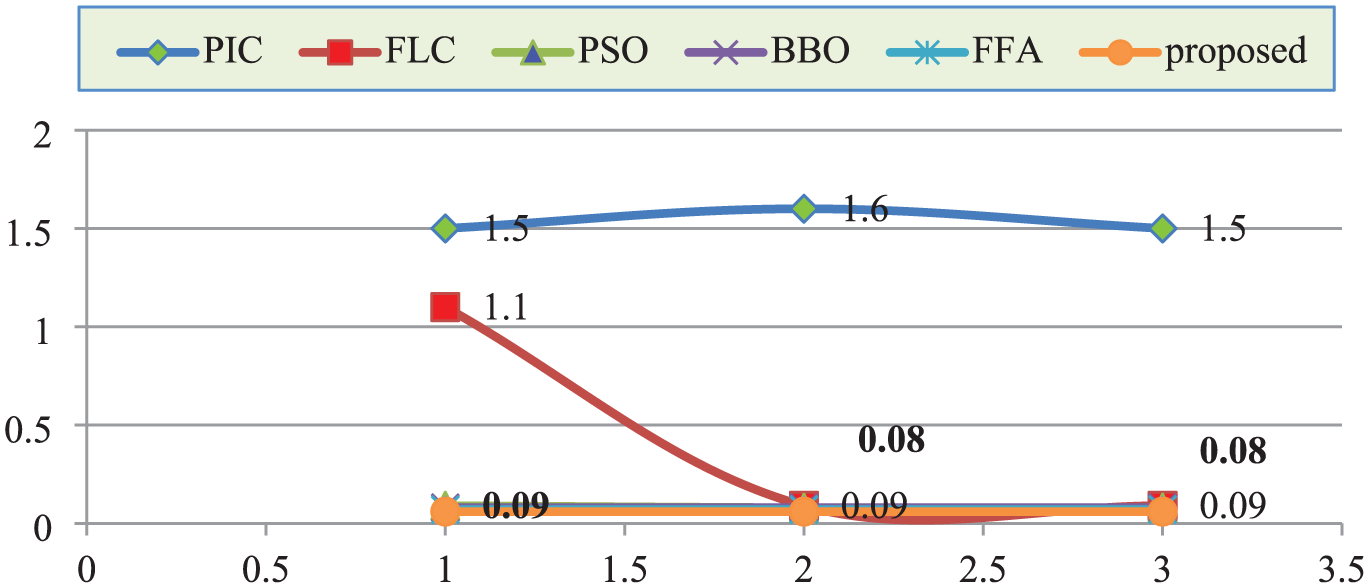
In this study, all three test cases are subjected to FFT analysis. It specifically concentrates on the outcomes of test study 3 that involves using an EV, sensitive nonlinear, unbalanced, and asynchronous motor in conjunction with numerous loads. Figures 9 and 10 display the PF and FFT analysis of current THD for every case. The observed time needed to achieve stable VADCBC for different control systems is shown in Figure 11. The data unequivocally shows that the DC bus voltage can be stabilized in less than 0.06 seconds by the suggested MRTHA-tuned PI-MRC based SHAPF with PIDC. Additionally, the plot showing the convergence of proposed method MRTHA with existing methods such as PSO, FFA and BBO comparison of case 1 is shown in Figure 8. It is evident, that PSO achieves 4.68% THD in 51 iterations with average execution time of 558 s, BBO reaches 3.79% in 40 iterations for 402 s, FFA reaches 3.85% in 23 iterations for 327 s and the suggested MRTHA reaches 3.59% in 17 iterations of 288 s with higher convergence stability and scalability with parameters when compared to other approaches. The statistical analysis of THD for case-1 is given in the Figure 12.
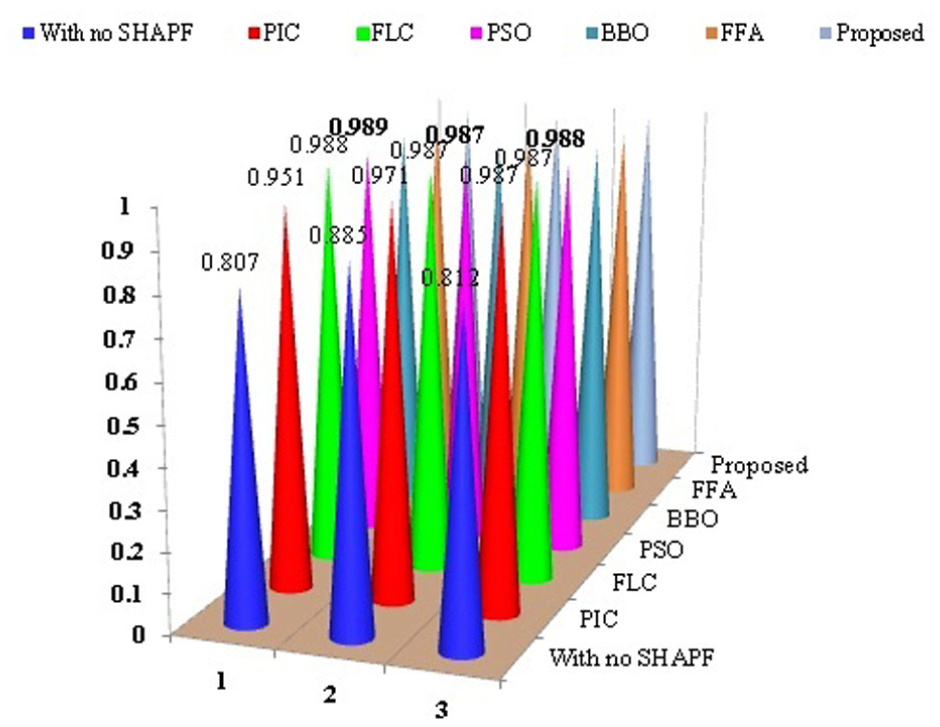
PF Comparison.
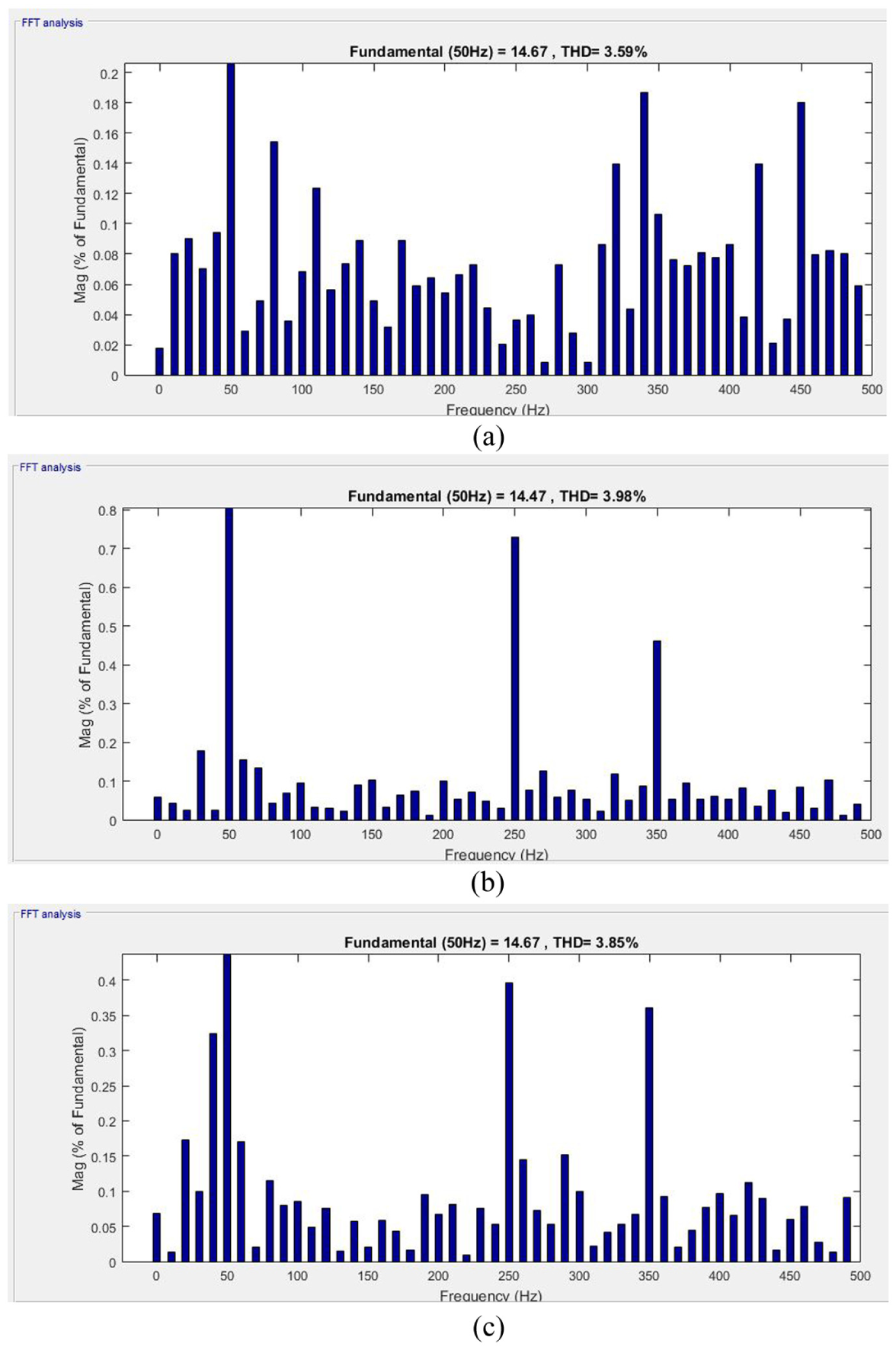
FFT spectrum. (a) Test study-1. (b) Test study-2. (c) Test study-3.
Time (s) to attain steady VADCBC.
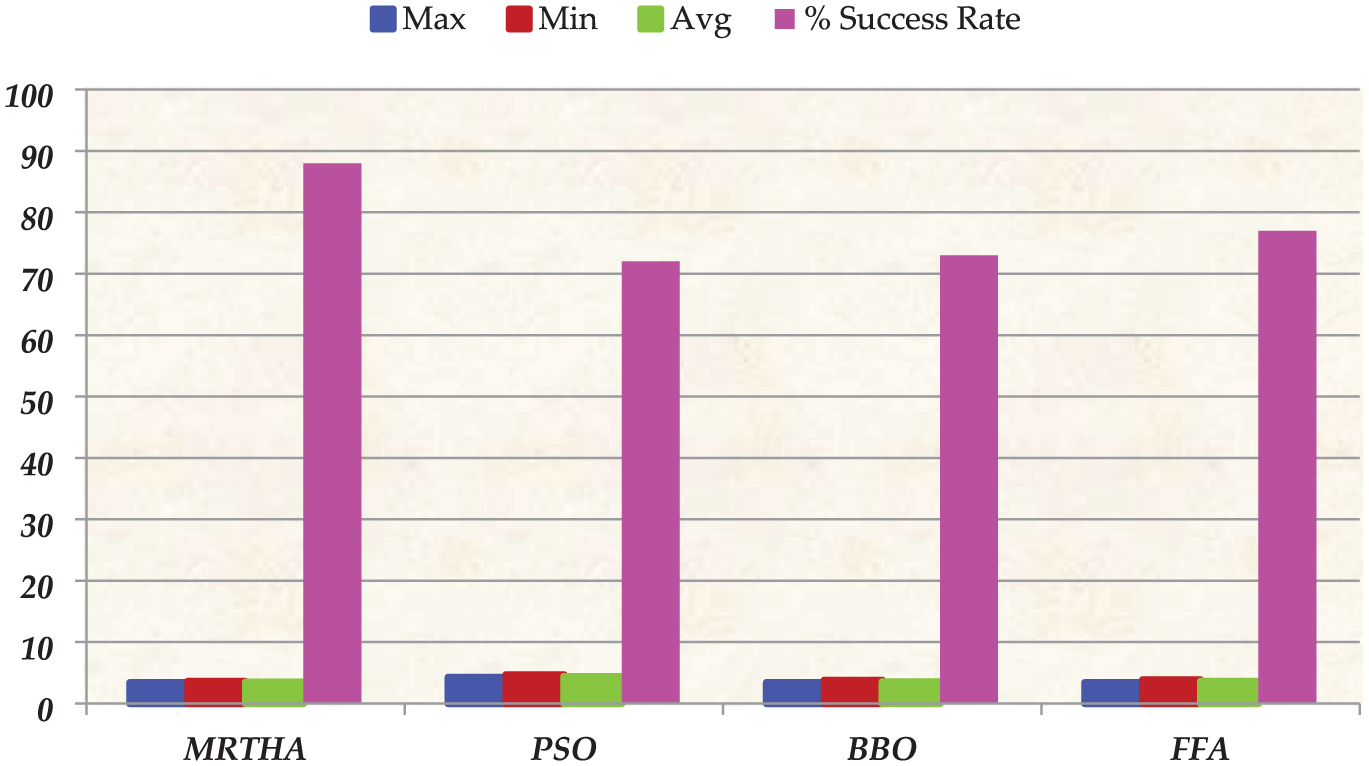
Statistical analysis of %THD for Case-1.
Traditional optimization algorithms like PSO, BBO, FFA etc suffers with premature convergence issue and multi objective problem of SHAPF controller and parameters tuning. The proposed MRTHA includes an escaping of prey concept that enhances global best solution, enabling the algorithm to avoid local minima with fast convergence and achieves lower THD, faster DC bus voltage stabilization, and higher PF when compared to PSO, FFA and BBO. Thus, MRTHA was selected for its robustness in exploration and exploitation, making it suitable for complex, high-dimensional optimization problems as the exploration strategy is not significantly impacted by increasing variable count.
However, this algorithm can also scale further to larger renewable storage-integrated systems or multi-level converters without fundamental changes. MRTHA is engaged for offline optimization, where the gain values of the controller and filter parameters are tuned prior to real-time operation. In fact, by reducing THD and improving PF, the approach indirectly lowers operational costs by minimizing losses, prolonging converter lifespan, and reducing penalties from PQ violations. The above discussion make it abundantly evident that the recommended approach is highly effective in reducing THD, enhancing PF, and ensuring a steady DC bus voltage.
Conclusion
A five level H-Bridge converter based SHAPF is selected in this work, and the MRTHA was used to choose the best PI-MRC and PIDC gain values for the shunt, green hydrogen energy powered FC, and BESS controllers as well as for the SHAPF, BOC, and BUBOC design characteristics. For reference signal generation, the MRTHA adjusted PI-MRC was optimized, allowing for rapid reaction in controlling the DC bus voltage, lowering THD, and enhancing PF. To exhibit the performance of three case studies were selected under various loads, varied irradiation, and FC tank pressure conditions showed that the suggested controller successfully reduced THD to within permissible bounds and raised PF to almost unity. This method performed better than the widely used FLC and PIC methods. According to the findings, the suggested approach produced THD values of 3.59%, 3.98%, and 3.85%—all of which are well within IEEE standards and less than those obtained by alternative approaches. Furthermore, the suggested system outperformed alternative techniques in achieving stable VADCBC within 0.06 s. The future scope of the research could focus on new advanced optimization methods for optimal selection of AI-based hybrid controllers.
Footnotes
Appendix
Number of parallel and series PV cells: 11/18; Maximum power: 214.92 W; current and voltage under max power: 5.4 A/39.8 V; Voltage and current under short circuit and open circuit conditions: 48.3 V/5.8 A; No of FC: 65; Efficiency: 55; Li-ion battery nominal voltage: 480 V and capacity: 48 Ah; Grid voltage: 415 V; source resistance and inductance: 0.1, 0.15 Ω; frequency: 50 Hz; DC link capacitor: 9400 uf with reference voltage: 700 V.
Ethical considerations
All authors agree.
Author contributions
Conceptualization was performed by KS and TMK; methodology was presented by KS, SS, and PKB; formal analysis and investigation were conducted by KS, SK, HS and SS; writing—original draft preparation was revised by KS, TMK, KS, SK and PKB; writing—review and editing were prepared by HS and SS; resources were provided by PKB, and HS; supervision was analyzed by TMK, HS, and SK. All authors read and approved the final manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.