
Abstract
This paper investigates distributed multi-group average consensus in a leader–follower framework using a robust fixed-time event-triggered control (FxTETC) approach. Unlike conventional consensus problems, agents are partitioned into multiple groups, achieving intra-group synchronization while tracking distinct inter-group trajectories. A complex number-based communication topology is introduced to facilitate intra-group coordination while preserving inter-group formation differences. To achieve fixed-time consensus under model uncertainties and external disturbances, fully distributed event-triggered sliding mode controllers (SMC) are designed. Distributed sliding manifolds establish consensus tracking, and a fixed-time event-triggering mechanism reduces unnecessary communications. The proposed distributed fixed-time control (FxTC) law requires no global network information, ensuring scalability and robustness. It guarantees convergence of all agent states to their group average consensus within a predetermined fixed time and provides a strictly positive lower bound on inter-event intervals to eliminate Zeno behavior. Numerical simulations validate the efficiency of the approach in achieving both intra-group synchronization and inter-group trajectory tracking over directed network topologies.
Keywords
Introduction
There has been growing interest in cooperative control of networked multi-agent systems(MAS), driven by its applicability to various domains including spacecraft, robotic teams, vehicular networks, and smart power grids.1–4 A key challenge in such systems is to achieve consensus, ensuring that all agents reach an agreement on certain states or trajectories. 5 To address this, extensive research has explored distributed consensus protocols for both linear and nonlinear multi-agent systems (MASs), leading to the development of adaptive and robust distributed control strategies. 6
Among these, fixed-time (FxT) control has become a strong framework because it guarantees convergence within a settling time that does not depend on initial conditions. This is different from standard finite-time methods, where settling time relies on initial states.7–9 Researchers have studied FxT consensus in various MAS configurations, including high-order and heterogeneous nonlinear systems. Recently, bipartite and multipartite consensus models have been introduced. These models expand on classical consensus by allowing group agreement under opposing or structured interactions.10–12 Bipartite consensus makes sure that two groups converge to equal but opposite values. Multipartite consensus generalizes this idea, enabling multiple groups to reach distinct yet related values. These models have proven helpful in clustering, formation control, and cooperative behaviors.3,10–13
At the same time, disturbances and uncertainties are unavoidable in real-world MAS applications. This drives research on consensus strategies that can handle external disruptions. 14 Despite these advances, much of the existing literature relies on time-triggered control, which needs regular communication and often creates significant communication overhead.15,16 To address this, event-triggered control (ETC) has emerged as a promising alternative. In ETC, communication occurs only when it’s necessary.17,18 Various ETC schemes have been proposed, including fully distributed adaptive designs,19,20 leader–follower consensus approaches, 17 dynamic and self-triggered strategies, 21 and event-based broadcasting protocols. 22 These strategies effectively reduce unnecessary transmissions by adapting triggering intervals to system dynamics. However, many earlier works relied on global information—such as the smallest positive eigenvalue of the Laplacian matrix—thereby limiting their fully distributed nature. 23 Recent studies have further explored robust and scalable ETC designs for MASs, including cooperative output regulation, 24 heterogeneous and homogeneous agent tracking, 25 and FxT convergence protocols. 26 Leveraging these recent developments, we propose a distributed, FxTETC framework designed for multi-group MAS. This framework achieves both intra-group synchronization and inter-group trajectory tracking, all while minimizing communication load and ensuring robustness. This study presents unique ETC distributed multi-group consensus algorithms to overcome the drawbacks of conventional time-triggered control and to fully utilize the advantages of FxT and ETC.27,28 These tactics employ a leader–follower architecture to synchronize agents both within and across groups with the least amount of communication overhead. Some recent studies have explored event-triggered strategies to enhance communication efficiency and system performance in MAS. In, 26 consensus convergence is optimized while minimizing data transmissions. The work in 29 addresses predictor design for nonlinear MIMO systems with large communication delays by proposing a periodic event-triggered mechanism with a cascade predictor to ensure exponential error convergence. The work in 30 presents an observer-based event-triggered formation control scheme specifically designed for linear MAS experiencing distributed infinite delays, achieving time-varying formation with reduced communication costs and guaranteed Zeno-free behavior.
In addition, SMC has proven to be a reliable strategy for achieving robust control of MAS when subject to external disturbances. 31 Several studies have explored SMC-based consensus control, addressing challenges such as robustness to uncertainties and disturbances. 27 Recently, FxT control has also emerged as a novel approach to address stability and convergence issues in MASs. 32 Unlike traditional finite-time control,33,34 FxT control offers stability guarantees irrespective of initial conditions, prompting research into FxT consensus across various MAS configurations and dynamics.32,35,36
To mitigate the challenges arising from fixed-interval (time-triggered) control mechanisms while harnessing the strengths of FxT and ETC in multi-group MASs, this paper proposes event-triggered distributed multi-party consensus strategies. These strategies utilize a leader–follower architecture and FxT control to synchronize agents within and across different parties while minimizing communication overhead. The proposed approaches aim to strike a balance between reducing data transmission frequency and ensuring FxT convergence for nonlinear agent dynamics.
The primary contributions of this work are summarized as follows:
We propose FxTETC strategy for multi-group MAS, extending cooperative control beyond prior works such as,12,37 which study multi-group consensus without FxTETC mechanisms. The proposed approach ensures FxT convergence while significantly reducing communication load.
Unlike, 27 which considers single-group consensus using SMC protocols, this work introduces a FxTETC framework for multi-group leader–follower consensus. The approach ensures intra-group synchronization while preserving inter-group separation, thereby enabling structured formation and coordination.
The proposed strategy exhibits resilience to uncertainties in the model and exogenous disturbances, and it scales effectively through a fully distributed design. These features collectively mitigate critical challenges of communication overhead, resilience, and network scalability in distributed consensus control.
The effectiveness of the proposed FxTETC scheme is established through rigorous theoretical analysis and validated via comprehensive numerical simulations.
Preliminary mathematical concepts and notations

For any vector


where the vector field g(z) exhibits homogeneity in the bi-limit. Specifically, its behavior near the origin and at infinity is described by the homogeneity triples
If the degree of homogeneity at infinity λ
b
is positive and the degree near the origin λ
a
is negative (i.e.
Suppose there exist constants δ
a
and δ
b
such that
Graph theory
Let a directed graph denoted as
For each node

which includes all nodes v j that have directed edges pointing to v i .
Multi party consensus
An augmented graph

The nodes in

The collection of group partitions is denoted by

where each
A sequence of alternating nodes
A weak path becomes a weak cycle if

where

If every weak cycle in the graph is consistent, the graph is said to be consistent; otherwise, it is called inconsistent.11,12
A spanning tree of the graph is selected, and each node is assigned a unique label in ascending numerical order. For example, assign the root as node 1, and label its child nodes as 2, 3, etc. Define:

Let

This is equivalent to the following identity:

This construction ensures that all edges in the spanning tree satisfy the consistency condition. Due to the consistency of the graph, this also extends to any other arcs not in the spanning tree.
Consider now two nodes m1 and m2 whose common ancestor is node n, as shown in Figure 1. Assume that there are
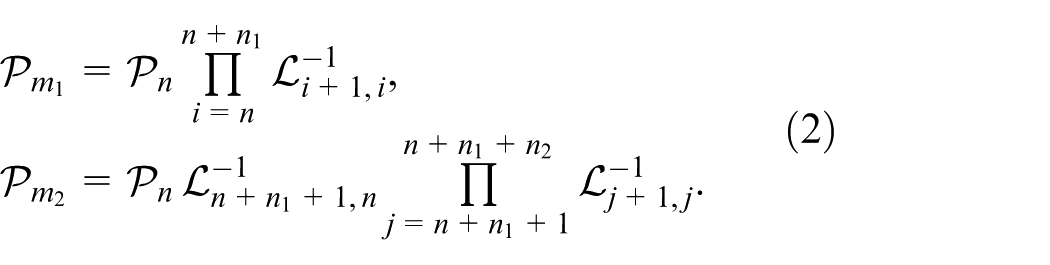
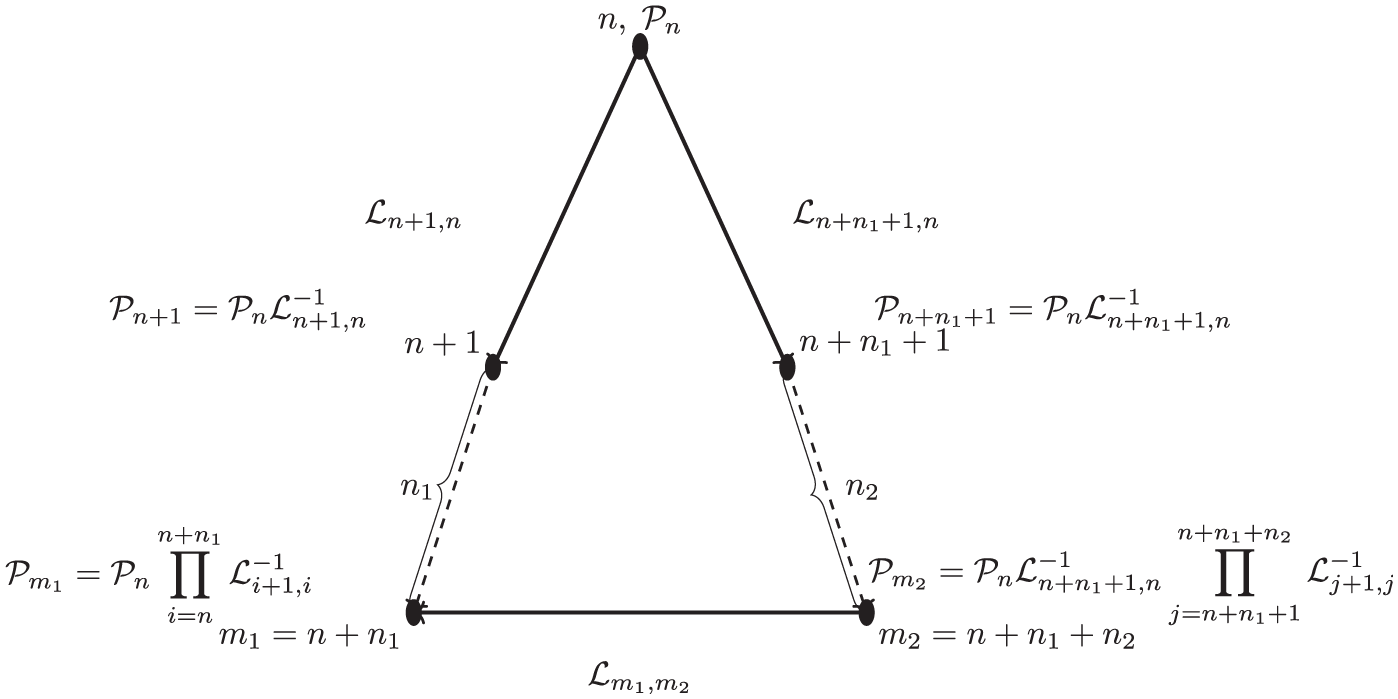
Tree-based construction of
Assume there exists an edge from m2 to m1. Then:
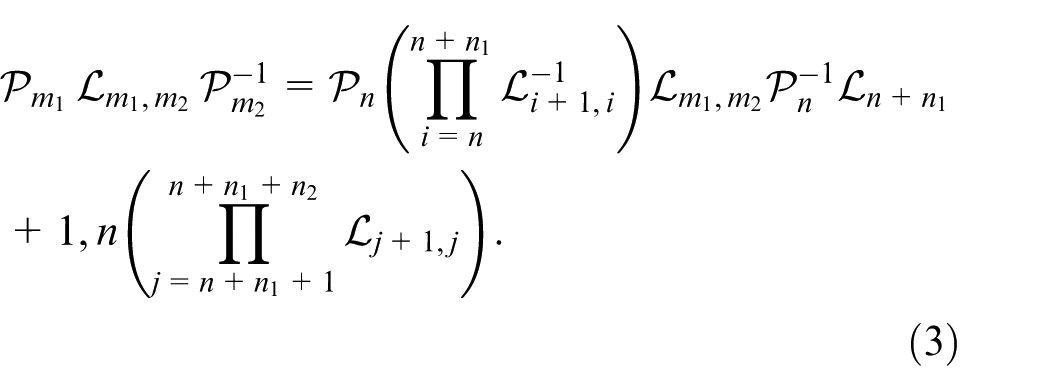
Since the graph is consistent, we have:
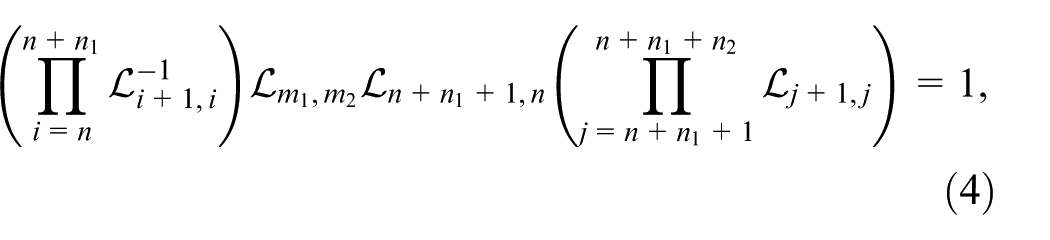
which, together with the previous identity, implies:

Problem formulation
This section addresses the problem of multi group multi agent consensus. Consider a set of
The motion of each follower agent is described by

where

for some known constant

is assumed to be bounded, that is,

for some constant
The leader (agent

where

Let
Each agent

indicating either identity coupling within the group or no interaction.
Based on the multi-group FxTETC framework, the sliding surface(SS) of the system in (6) can be computed as follows:

with
where the parameters are chosen such that the parameters ϖ
i
and

and the integers
Based on equation (9), define a variable as
for ith agent,


We introduce the following error variable to reach the average multi party synchronization of the nonlinear MAS in equation (6):
Where

where the triggering threshold

Proof. Consider the Lyapunov function

By differentiating (17) and applying (8) together with the triggering condition (15), we obtain
Using the bounds

Rewriting,
With the constraint

Define the minimum gains

Since

where

Let

and

Then the FxT convergence time satisfies

Thus, all
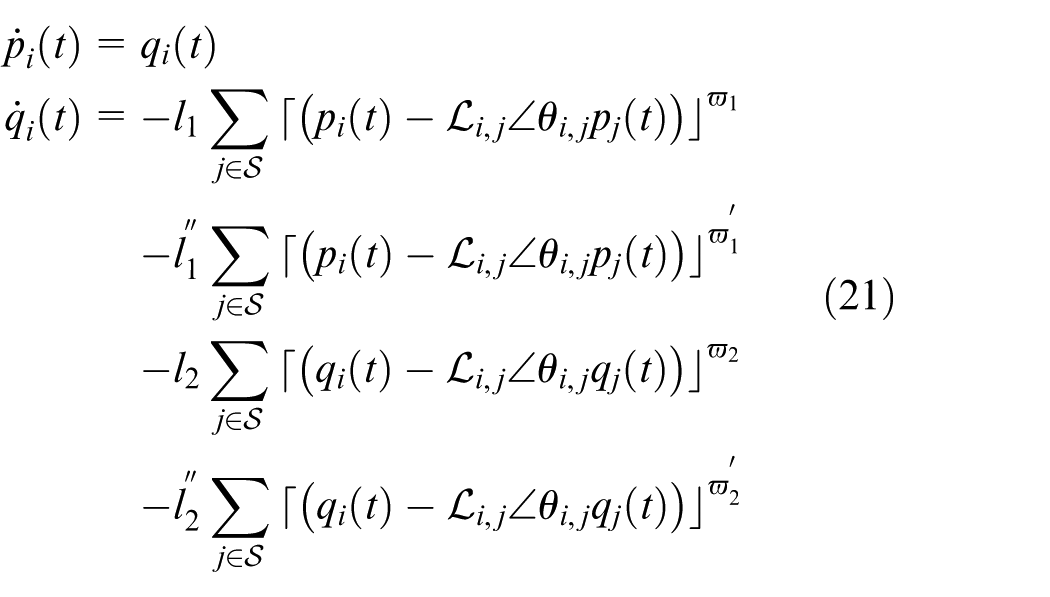
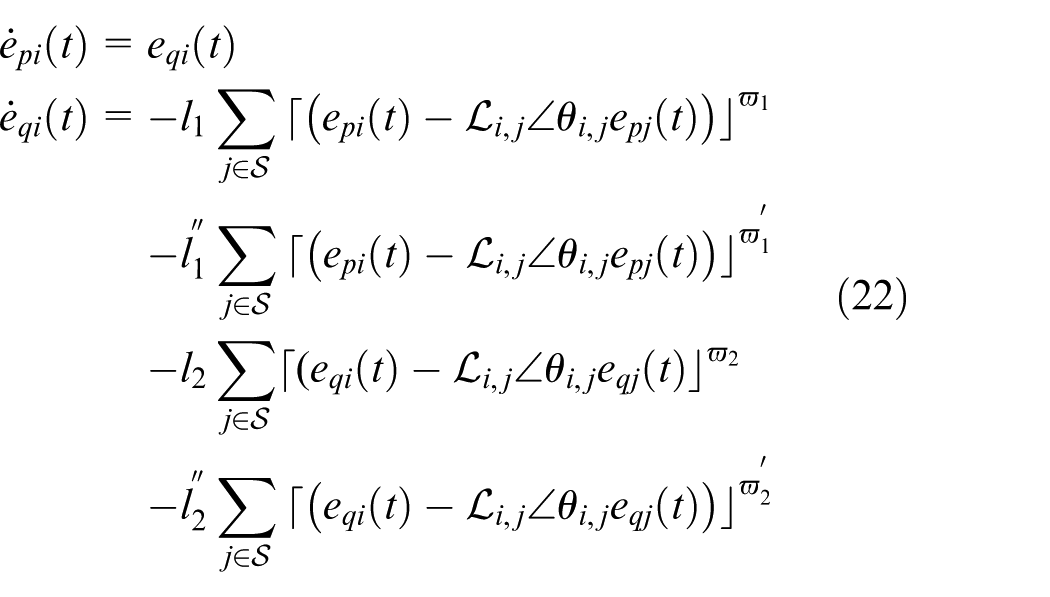
Homogeneity-based fixed-time stability analysis
To establish FxT stability,39,40 the proof is carried out in two main steps. In the first step, it is demonstrated that the system described by equation (22) achieves GAS under the control law specified in equation (12). In the second step, it is shown that the corresponding limiting systems also exhibit GAS, as they characterize the system dynamics near the origin and at infinity. The proof is finally completed by applying Lemma 1 and utilizing the bi-limit homogeneity property.
The system dynamics, when constrained to evolve on the sliding manifold defined in equation (8), exhibit the following behavior under the control law (12):
By defining
To assess GAS, consider the Lyapunov function:
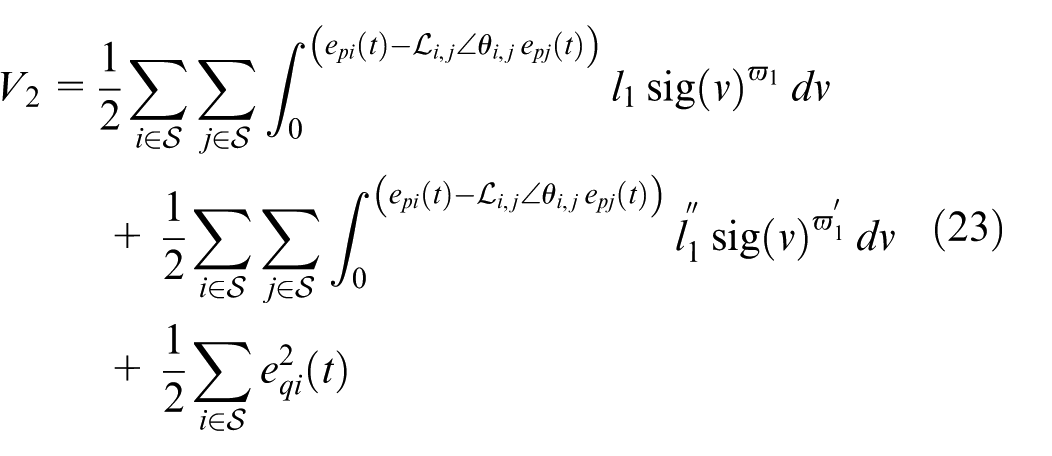
Differentiating the Lyapunov function in equation (23) and substituting from equation (22) yields:
Because

and

one can conclude that
Furthermore, to verify the FxT stability using the bi-limit homogeneity method,
8
consider the error dynamics in (22). Let
From (26) and (10), it follows that the condition
Moreover, the vector fields
Hence, in the 0-limit,
Similarly, in the
Thus, the system is bilimit homogeneous within the framework of Lemma 1.
Furthermore, the vector field
By differentiating the Lyapunov function and utilizing equation (22), one can obtain:
Because
one can conclude that

Consequently, the states of the multi-group MAS reach average consensus.
It can be observed
By taking the time derivative of
Because

it follows that

Based on the principles of homogeneity theory,9,40 the GAS of both the zero-limit and infinity-limit systems under bi-limit homogeneity ensures that the original nonlinear system possesses FxT stability.
This completes the FxT stability analysis grounded in the homogeneous structure of the system. As previously established, the system exhibits GAS, 31 and the conditions for homogeneity are satisfied. Therefore, by using Lemma 1, it follows that the system described by equation (33) is FxT stable.
Justification of triggering condition
let a sequentially progressing time instants
Proof. By defining
Under Assumption 1 and 2, the derivative of the absolute error (14)
where
Let us assume that
The event is commonly understood not to occur until
Therefore, the inter-event interval ϕ ik is calculated as

With
It demonstrates that the Zeno behavior is excludable. This completes the proof. □
Simulation results
Consider a multi-agent system (MAS) comprising ten agents, including one leader node (denoted as node L) and nine follower agents. The directed communication topology among these agents is illustrated in Figure 2.
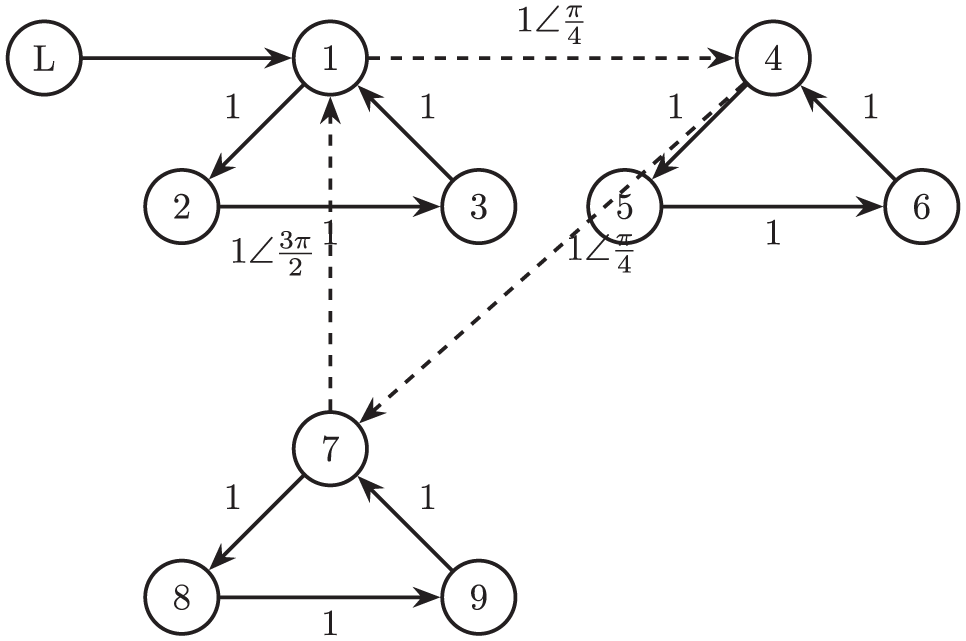
Communication topology showing intra-group and inter-group weighted links.
In the communication topology, Agents 1, 2, and 3 constitute Group 1; Agents 4, 5, and 6 form Group 2; and Agents 7, 8, and 9 comprise Group 3.
The multi-agent system (MAS) dynamics are described by equation (6). The associated nonlinear functions and external disturbances are defined as:
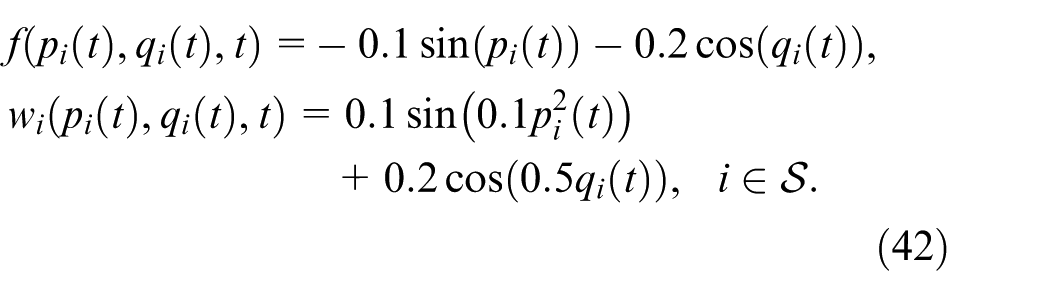
The initial positions of the agents are set as:

The initial velocities are set as:
The objective of this controller is to design a multi-formation configuration for the agents while maintaining the communication graph structure depicted in Figure 1. For group 1, the reference trajectory is chosen as
Based on equation (6), the interaction weights among agents within the same group are assigned a value of 1. For inter-group communication, the weight between Group 1 and Group 2 is specified as

Using controller (12) and the event-triggering function (15) with the following parameters:
The parameters for designing the sliding surface are chosen as
Time invariant formation control
The initial positions and corresponding controller parameters of the MAS are specified above. Figure 3 shows that the followers are able to track the trajectory of the leader, it shows that in a multi group consensus the each agent in a group 1 synchronize with each other. Similarly for Group 2 and Group 3 the inter group synchronization is shown by Figures 4 and 5 respectively.
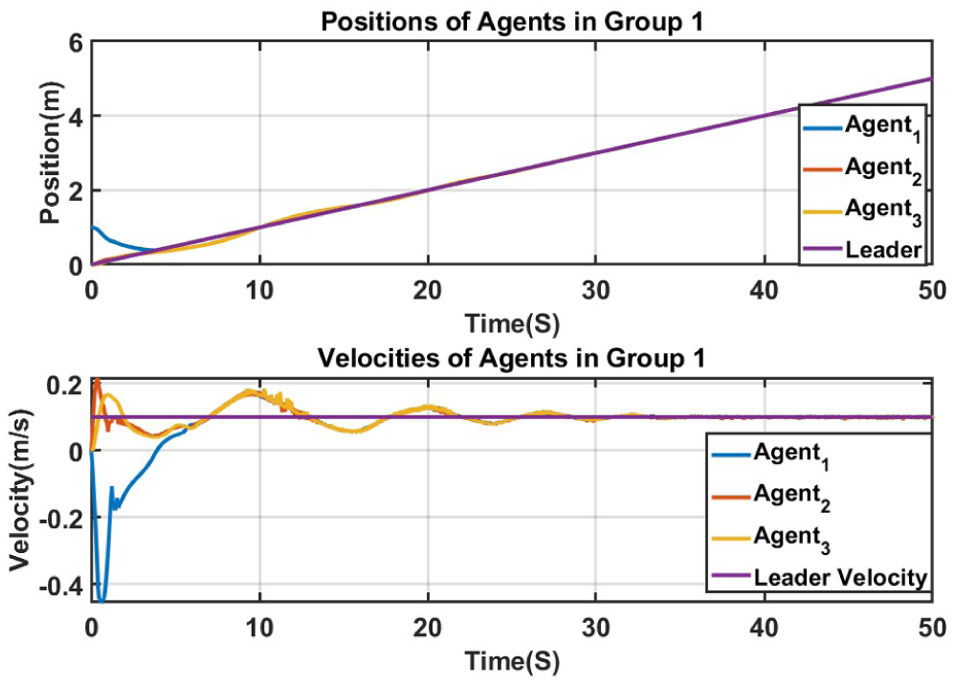
Group 1 positions and velocities.
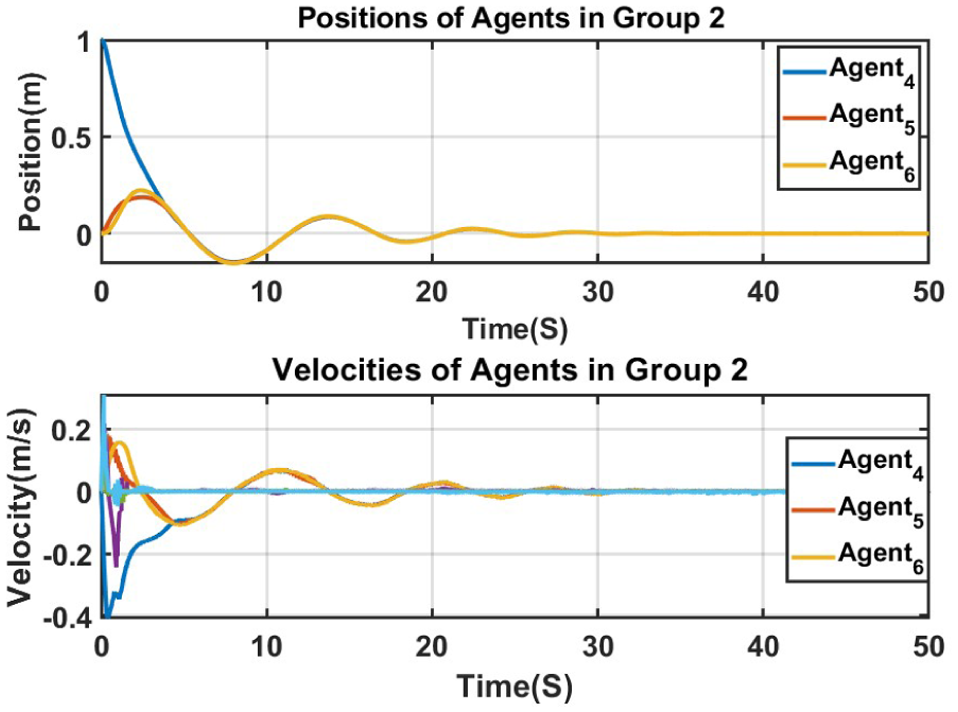
Group 2 positions and velocities.
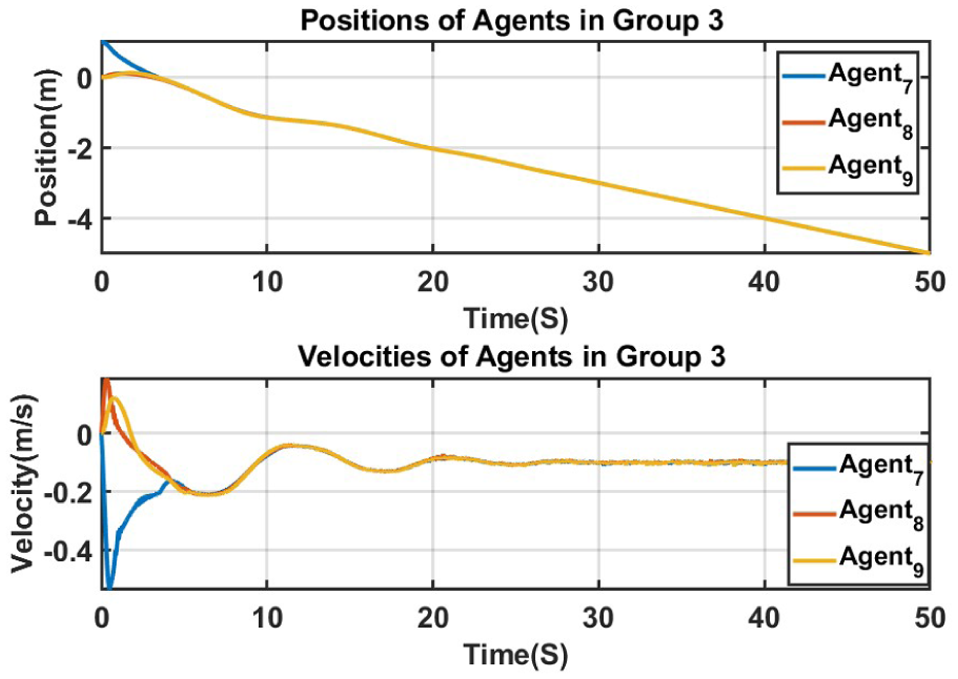
Group 3 positions and velocities.
The Figure 6 illustrates the sliding surface trajectories associated with the leader of each group. Each curve corresponds to one group leader, showing how the designed sliding surface converges toward zero over time. The decreasing trend confirms that the control law effectively drives the leader dynamics onto the sliding surface, thereby ensuring stability and coordination within each group. The convergence of all leader surfaces highlights the robustness of the proposed strategy in handling inter-group synchronization.
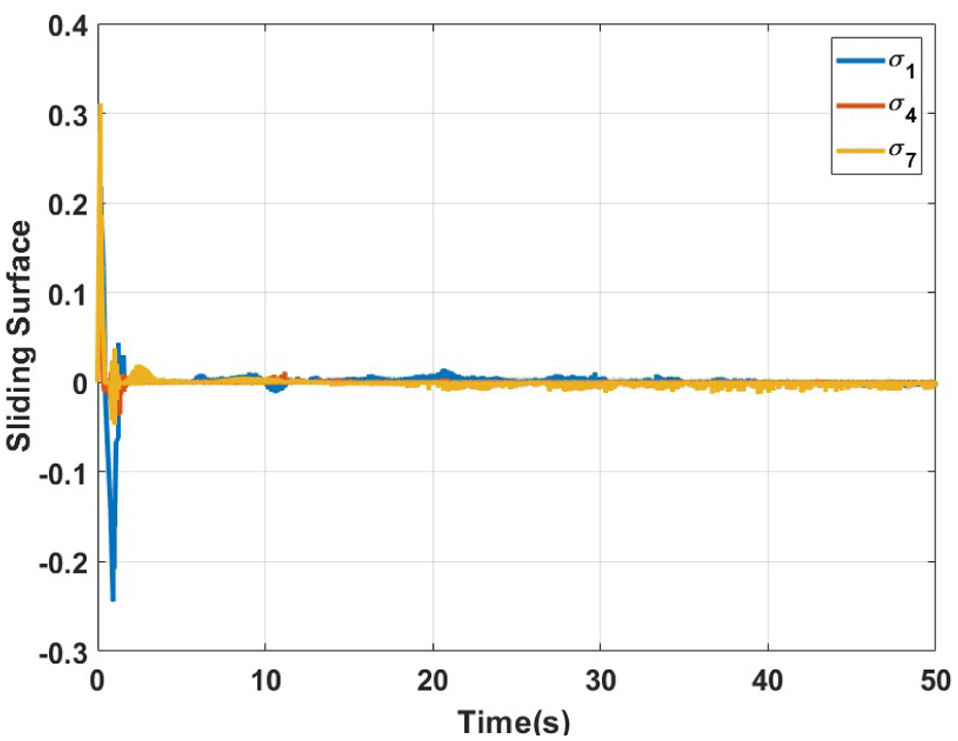
Evolution of the sliding surface corresponding to the leader within each group.
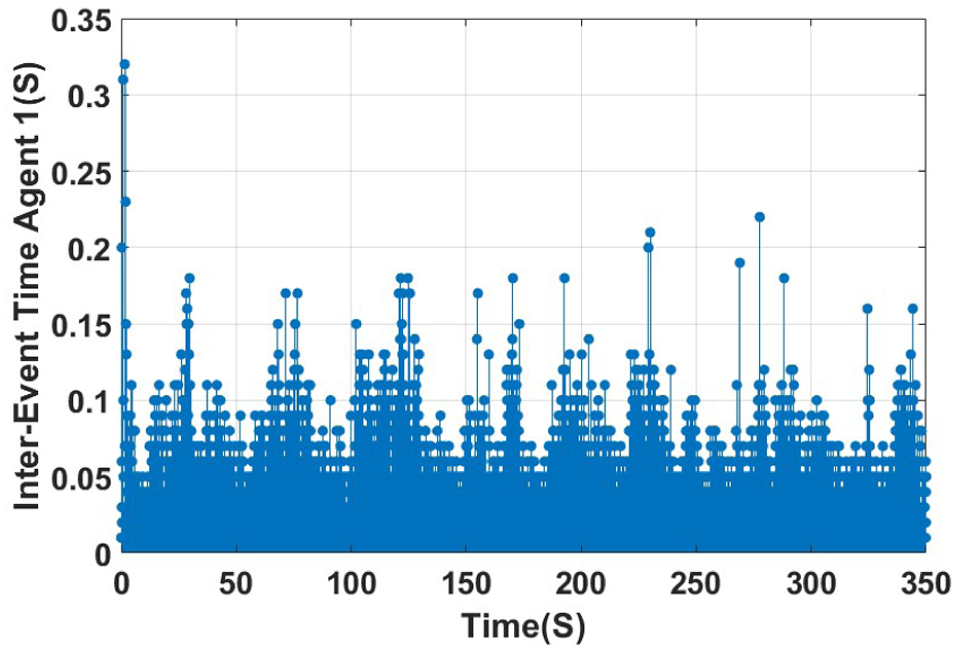
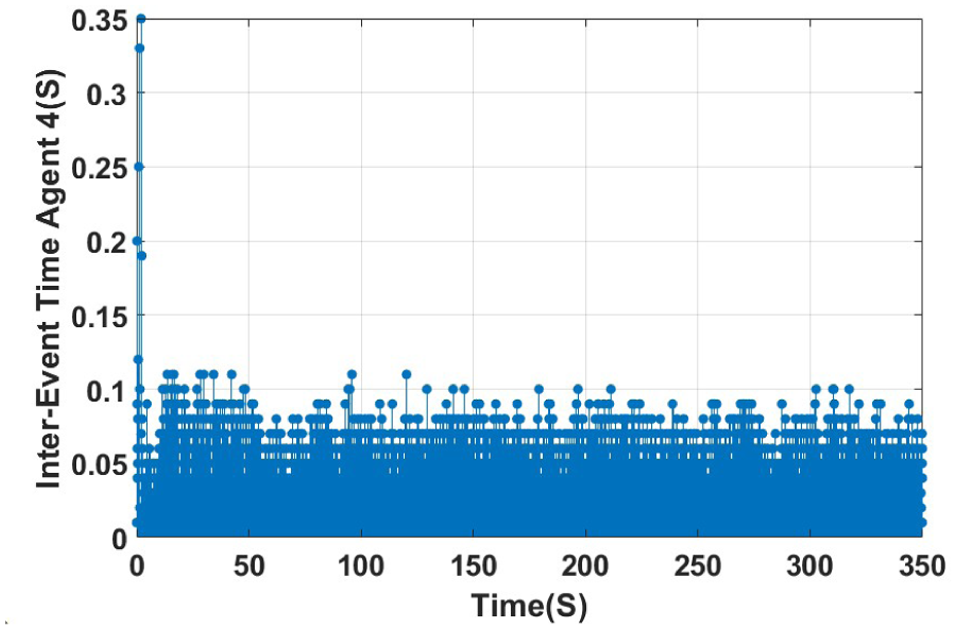
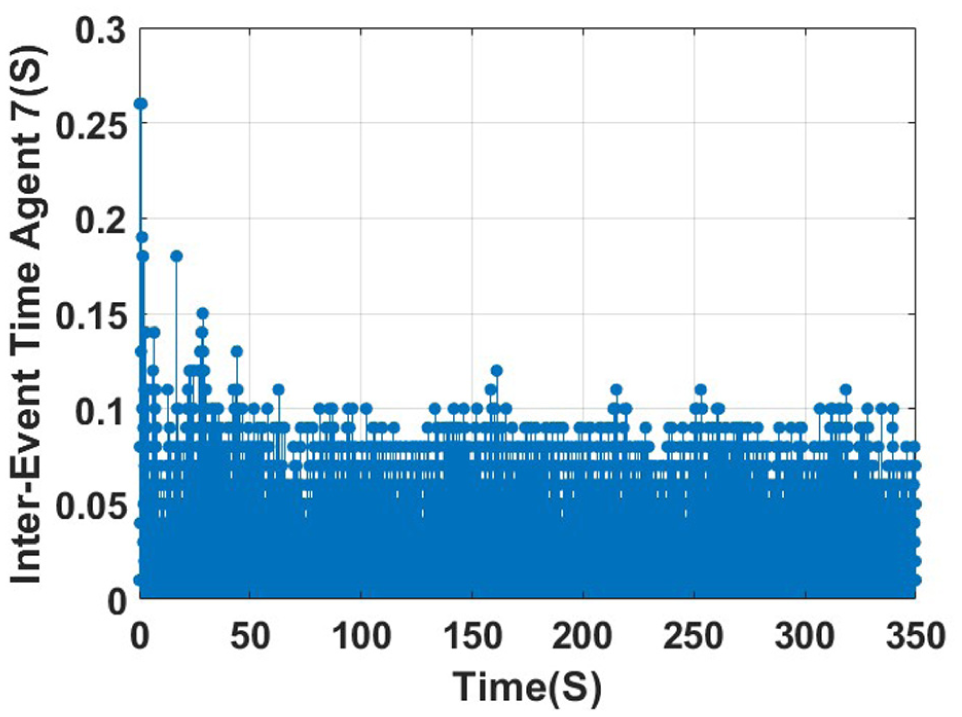
Figures 7 to 9 depict the time courses of updates triggered by events and the respective time intervals under the condition of event triggering for agents 1, 4, and 7, respectively. These figures demonstrate when each agent executes the control updates under the event-triggered event. Importantly, for all of these agents, the time between two subsequent triggering events is guaranteed to be constant forwards from zero. This observation implies that there are not infinitely many events in a finite length of time, a behavior that is known in the literature as Zeno behavior. The event time consistent across all of the selected agents demonstrates that the proposed event-triggered strategy is effective for eliminating Zeno execution in the multi-group consensus problem.
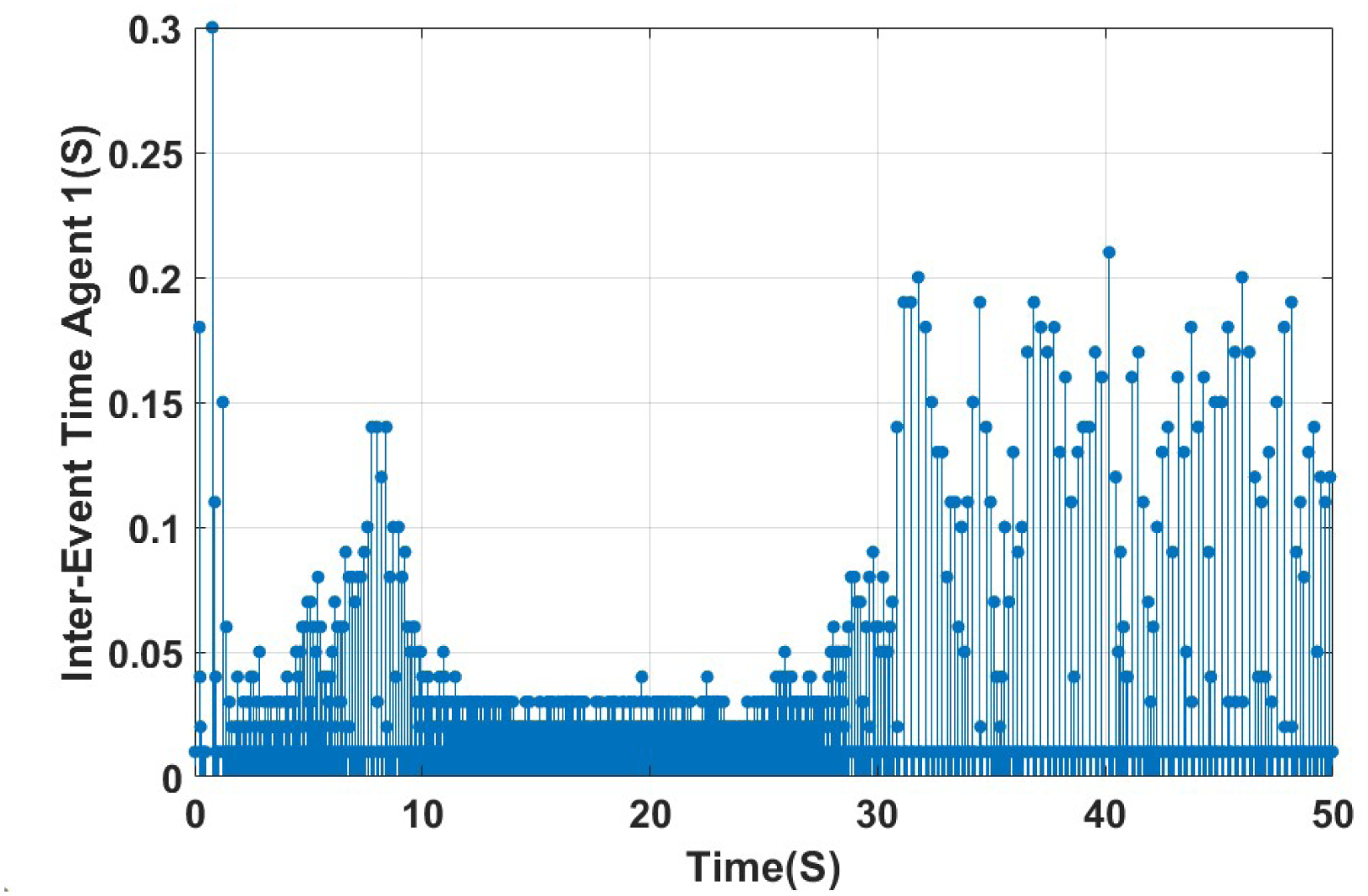
Inter-event time plot of agent 1 for ramp function.
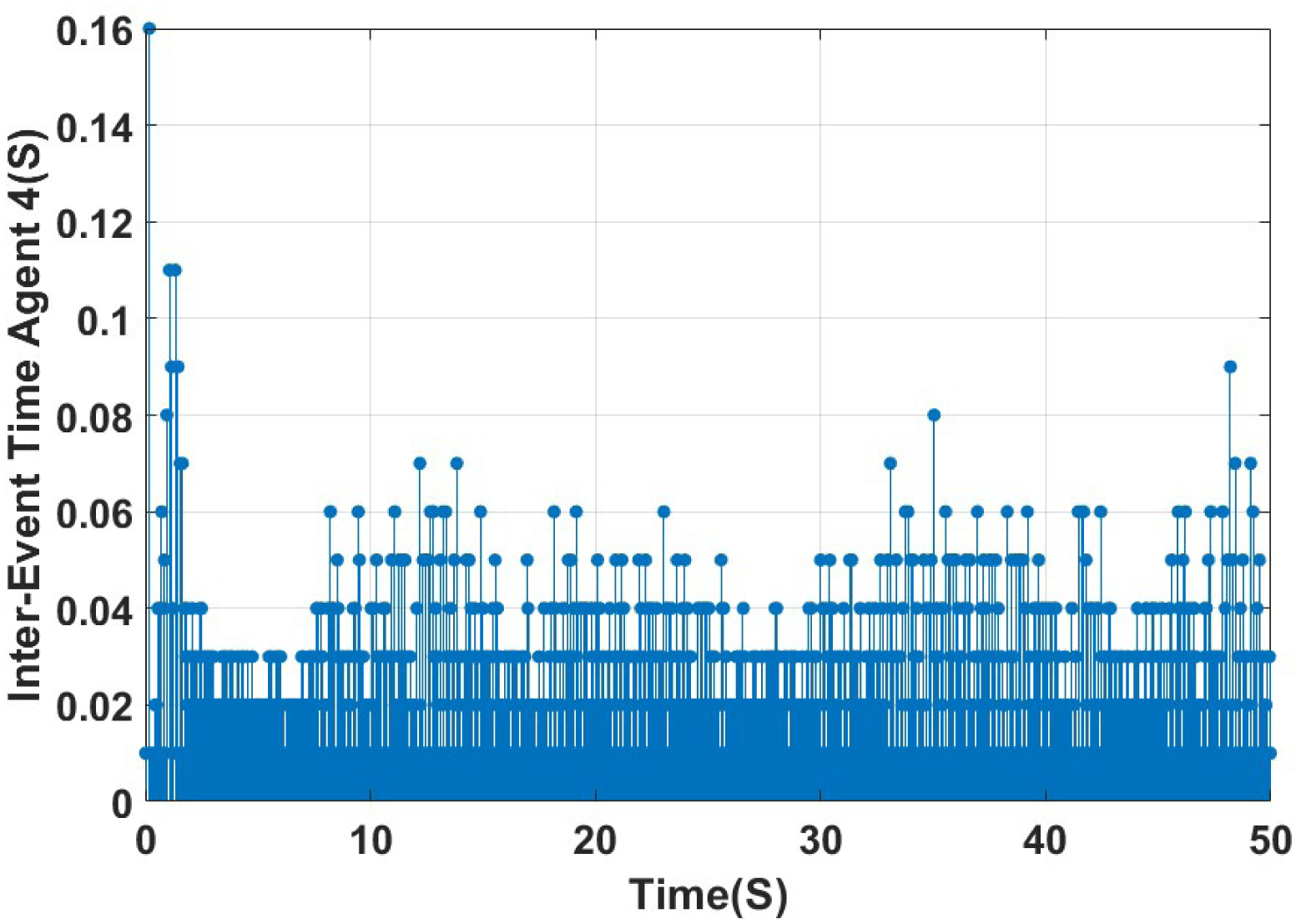
Inter-event time plot of agent 4 for ramp function.
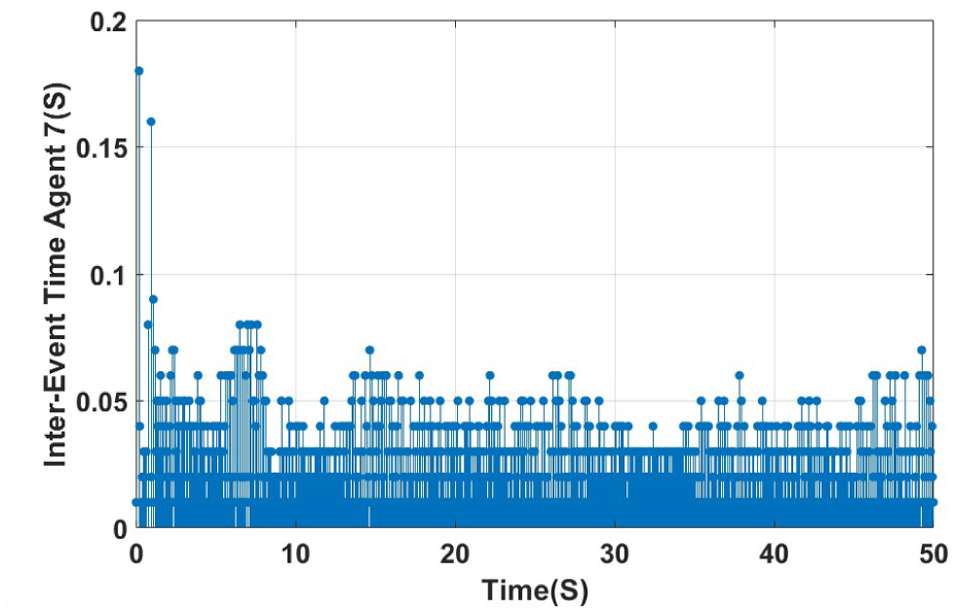
Inter-event time plot of agent 7 for ramp function.
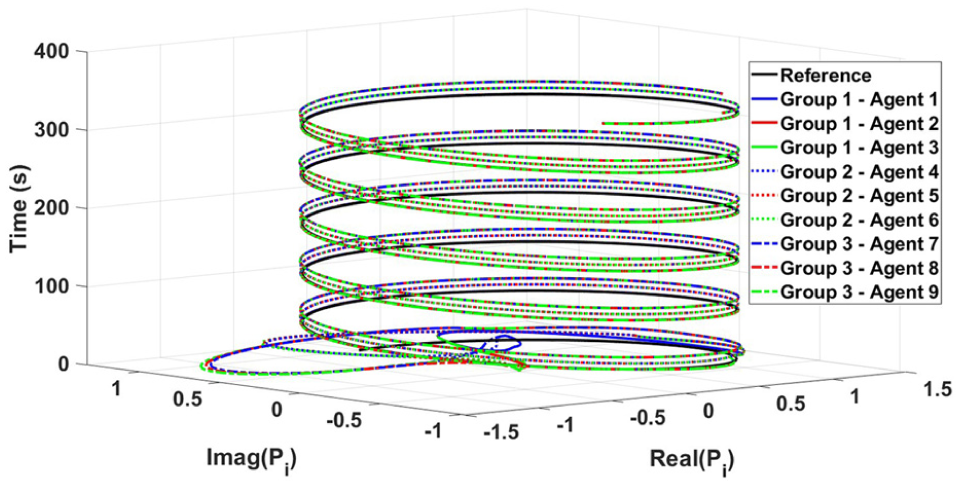
Figure 10 displays the three-dimensional trajectories of all agents. The results indicate that the followers within each group successfully follow the trajectory of their respective leaders. Additionally, the plots confirm that consensus is maintained not only within individual groups but also across different groups, indicating proper inter-group coordination.
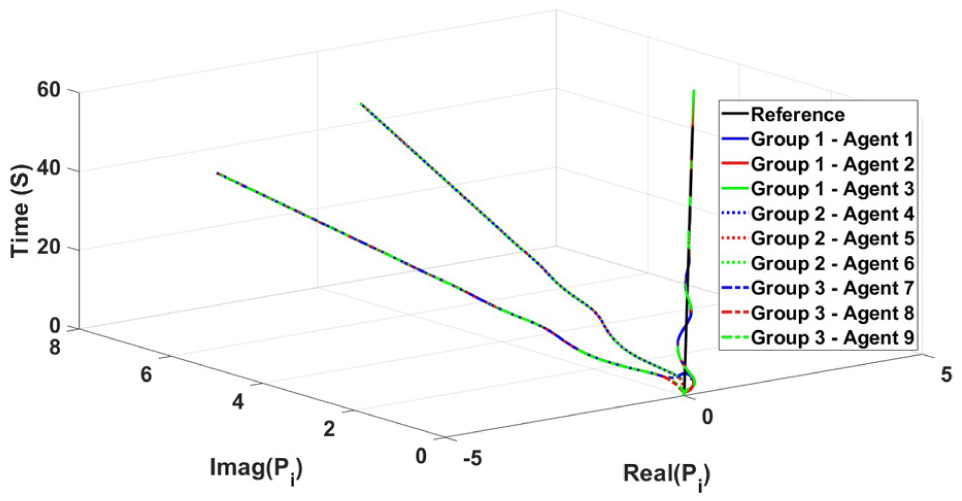
3D position trajectories of different groups for ramp function.
To quantitatively evaluate the benefits of the multi-group consensus framework, mean squared error (MSE) formation error is introduced. For a system of

where

is the instantaneous group average. This definition provides a time-varying measure of how far each agent is from the consensus state. To summarize the long-term behavior, the average MSE of agent i over the entire simulation interval of length T is given by

Figure 11 depicts the MSE of the agents. When consensus is achieved, MSE i for each agent goes to a very small value, thereby confirming that the proposed FxTETC strategy ensures convergence of all agents to the desired group average.
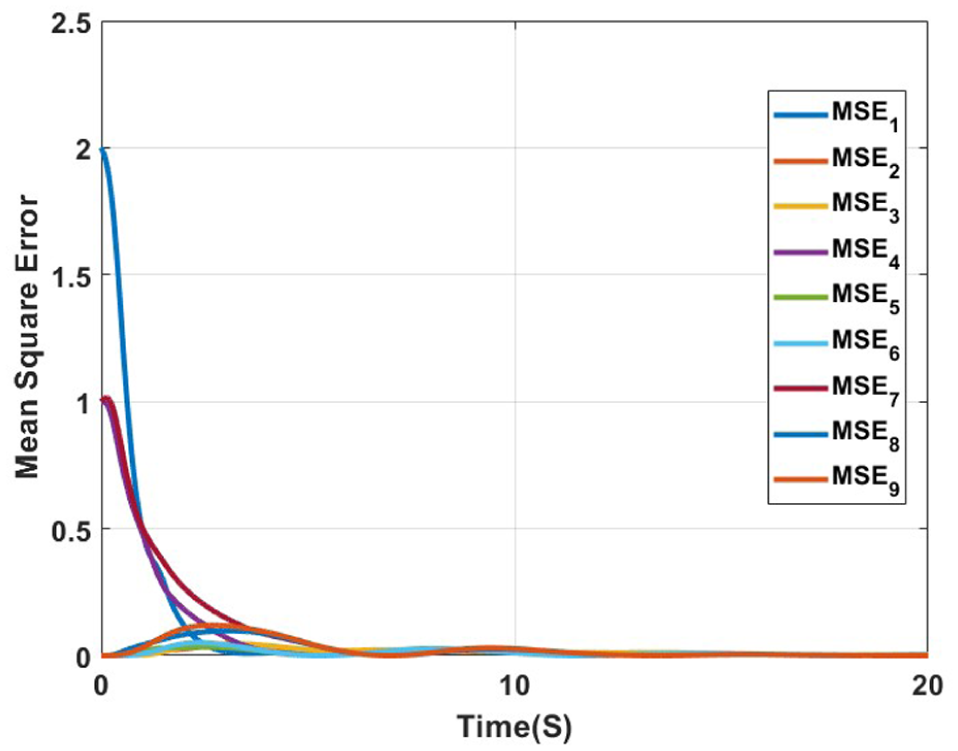
MSE error in multi group consensus.
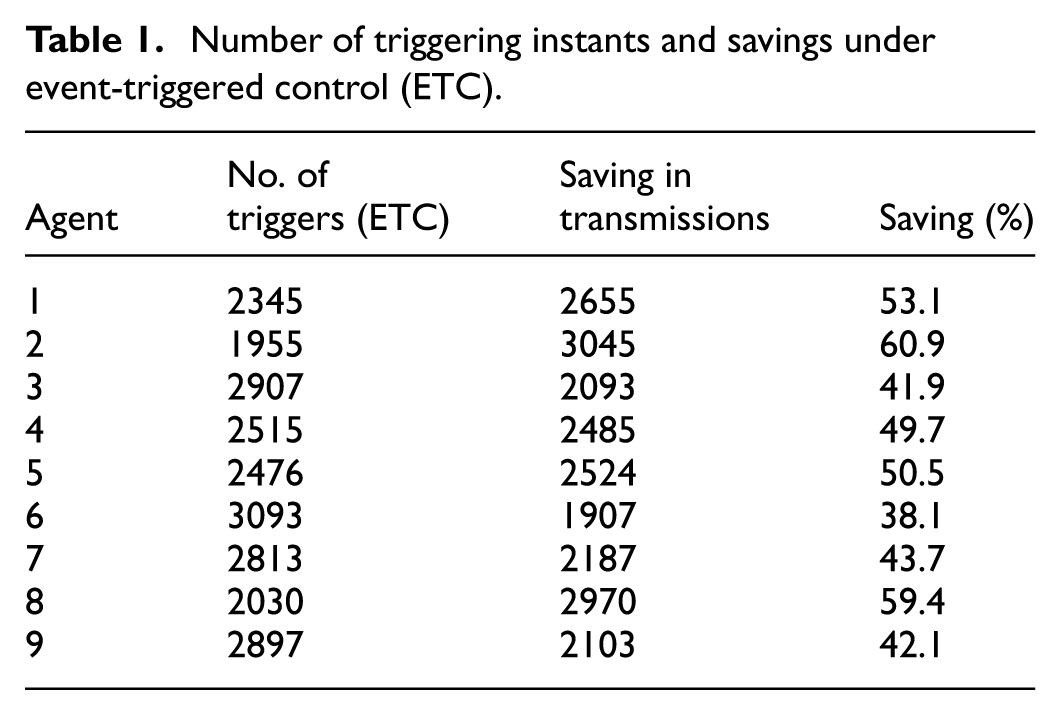
For the MAS problem, in the absence of ETC, a conventional time-triggered strategy must be employed, which incurs a communication cost of 5000 sampling or data transmission instants for multi-group consensus tracking of a ramp function, given a step size of 0.01. In contrast, when ETC is applied, each agent triggers its communication at different rates, as summarized in Table 1. This clearly demonstrates the significant reduction in communication load achieved with ETC, which is approximately
Number of triggering instants and savings under event-triggered control (ETC).
Time variant formation control
For a time variant tracking the leader reference signal is chosen as
3D position trajectories of different groups for time variant formation control.
Figures 13 to 15 present the event-triggered time intervals for Agents 1, 4, and 7, representing three different groups. Due to space limitations, only one representative agent from each group is shown. These plots validate the efficiency of the proposed ETC strategy in minimizing both energy usage and the frequency of controller updates. Despite the occurrence of multiple triggering events, the presence of nonzero intervals between them confirms that Zeno behavior is successfully avoided.
Inter-event time plot of agent 1 for time variant formation control.
Inter-event time plot of agent 4 for time variant formation control.
Inter-event time plot of agent 7 for time variant formation control.
Conclusion
In this paper, a distributed multi-group average consensus problem is presented, employing a leader-follower architecture with fixed-time event-triggered control. The proposed method ensures that agents, divided into distinct parties, achieve synchronization within their groups while maintaining distinct target trajectories across different parties. Using distributed sliding manifolds and integral functions, the consensus problem in disturbed multi-agent systems (MASs) was introduced under a directed graph setting. The event-triggering mechanisms proposed improved the network resource usages by minimizing unnecessary communication, while guaranteeing fixed-time convergence and avoiding Zeno behavior. The theoretically derived sufficient conditions for average multi-agent consensus in nonlinear MASs were validated through numerous numerical simulations and empirical comparisons demonstrating the applicability and performance of the proposed methodology.
Footnotes
Ethical considerations
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Author contributions
All authors contributed equally to the conception, development, and writing of this manuscript. Nirban Kumar Saha, Sanjoy Mondal, and Madhumita Pal led the theoretical analysis and control design. Santosh Sonar contributed to the system modeling and stability analysis. Arnab Basu coordinated the research, refined the manuscript, and served as the corresponding author. Subhojit Kar assisted with simulations and final proofreading. All authors reviewed and approved the final version of the manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
No datasets were generated or analyzed during the current study; therefore, data sharing is not applicable.