
Abstract
This paper investigates the state estimation problem for nonlinear systems with binary-encoding-based quantization, bit-flipping and heavy-tailed noise. Due to the limitation of the communication channel bandwidth in a network environment, the measurement data collected by sensors must be quantized based on a limited number of bits and converted into binary codes for transmission, thus generating quantization errors. Meanwhile, during data transmission, the binary code output from quantization is affected by channel noise, signal distortion, signal interference, and other factors. It is prone to bit-flipping (i.e. 0 is flipped to 1, and 1 is flipped to 0), which leads to communication errors. For the problems of quantization error, heavy-tailed noise and bit-flipping, this paper aims to achieve the state estimation of such nonlinear systems by improving the particle filter algorithm, with the aid of the Bayesian formula and the Monte Carlo simulation method. To address the issue of particle degradation in particle filtering, this study employs a Gaussian approximation of the posterior probability density as the proposal distribution. In the design of the proposal distribution, a normalized innovation sequence is introduced to mitigate quantization errors and bit-flip effects. Based on this formulation, the mean, covariance of the proposal distribution, and likelihood function are analytically derived, yielding a complete proposal distribution. Subsequently, particles are sampled from the constructed proposal distribution, and an updated particle weighting scheme is rigorously derived. The optimal state estimate is obtained through a weighted summation of the particles. Numerical simulations are conducted to validate the efficacy of the proposed algorithm.
Keywords
Introduction
With the rapid development of modern science and technology, nonlinear systems play an increasingly important role in many fields such as aerospace, artificial intelligence, communication, and control systems.1–14 Since the dynamic characteristics of nonlinear systems are complex and highly uncertain, it is often accompanied by the influence of unknown factors. Traditional linear state estimation methods are inadequate satisfy practical requirements. Because of this, scholars have carried out a lot of explorations to face the state estimation problem of nonlinear systems.
The Kalman Filter (KF) algorithm is one of the classical methods for state estimation problems.15,16 Using the minimum mean square error method, the KF provides an effective recursive calculation method to estimate the system state. Buck et al. 17 Sunahara et al. 18 and Zheng et al. 19 proposed the well-known Extended Kalman Filter (EKF) algorithm based on the KF algorithm. However, the KF algorithm requires that the system be linear, which limits its application. As an early extension of the KF, the EKF adapts the linear framework to nonlinear systems via first-order Taylor series expansion and linearization. However, in the case of strong nonlinearity, neglected high-order terms often introduce significant errors, leading to filter divergence. Additionally, the computation of the Jacobian matrix is cumbersome. To mitigate parameter estimation bias arising from the linearization of nonlinear systems, the Unscented Kalman Filter (UKF) algorithm based on the Unscented Transform (UT) principle was proposed.20,21 The core of the UKF algorithm is to approximate a probability distribution. However, EKF and UKF in the state estimation field require high accuracy of noise distribution and measurement information. To overcome the limitations of the above filtering methods regarding system model characteristics and noise distribution, subsequent researchers proposed particle filter algorithms. Particle filtering 22 is based on Monte Carlo sampling and approximates the posterior probability distribution of the system state using a large number of weighted particles. Theoretically, particle filtering can effectively solve the state estimation problem of arbitrary nonlinear and non-Gaussian systems. Moreover, since the Monte Carlo simulation approach relies on the law of large numbers, it can be readily extended to high-dimensional scenarios. After years of development, particle filtering algorithms have been gradually improved, which has led to the formation of a complete theoretical framework. However, particle filtering still faces several challenges, such as particle degradation, sample impoverishment, high computational complexity, and real-time performance issues. 23 To address these challenges, researchers across various disciplines have proposed a range of optimization methods, thereby significantly advancing the development of particle filtering techniques.
As a fundamental technique in modern communication and control systems, signal quantization has recently been employed extensively in fields such as nonlinear control, distributed learning, and networked systems.24–30 Owing to limited communication channel bandwidth in networked environments, analog sensor data are typically quantized into binary codes before transmission to a remote estimation center. Improper quantization can significantly degrade system performance and even cause divergence due to quantization errors. Therefore, signal quantization has become a focus area for many researchers. For example, dynamic quantizers designed for discrete-time nonlinear systems can adjust quantization parameters in real time using the adaptation parameter μ
31
to handle to signal variations. In parallel, they synchronously optimize controller and quantizer parameters to suppress the effect of quantization error through matrix inequalities. However, traditional deterministic truncated quantization methods suffer from intrinsic limitations, frequently resulting in considerable quantization errors. As demonstrated in,32–34 recent studies have extensively investigated probabilistic quantizers as a more robust and adaptive alternative to address this challenge. The core operating mechanism of probabilistic quantizers
35
involves partitioning the probability space into multiple quantization intervals. The continuously varying measurements are subsequently mapped to corresponding quantized values based on a predefined probabilistic mapping rule. Unlike traditional deterministic quantization methods, probabilistic quantizers not only focus on the magnitude of input values but also consider the probability of their occurrence. As a result, the statistical characteristics of the original data are better preserved during the quantization process. Notably, each quantized output is a random variable whose expected value equals the corresponding original signal value. This property fundamentally ensures the unbiasedness of the quantization process and provides a solid guarantee for subsequent signal processing and system operation.
34
Shen et al.
36
focused on the H2 control of linear systems with multiple quantization channels and designed a composite controller to meet performance requirements. Another work was concerned with the mismatched quantized
The bit-flipping mechanism is a fundamental technique that alters the values of bits in binary data, that is, converting 0–1 and vice versa, to achieve specific functional objectives. The bit-flipping mechanism is a core error correction technique for information processing systems. In recent years, it has seen significant development in quantum computing, classical coding, and adversarial communication.39–42 In the context of state estimation, most existing studies on quantization-based methods implicitly assume that the quantized output bit string can be transmitted without error. In practical scenarios, bit-flipping errors frequently occur during signal transmission due to channel noise, distortion, interference, and transceiver clock synchronization mismatches. These errors inevitably lead to communication failures, as illustrated in Figure 1. Given this, these challenges have attracted considerable research attention, and notable progress has been made. In linear discrete-time-varying systems, Liu et al. 35 derived the Binary Coded Quantized Kalman Filter (BQKF) algorithm to model the effects of bit-flipping during quantized transmission.
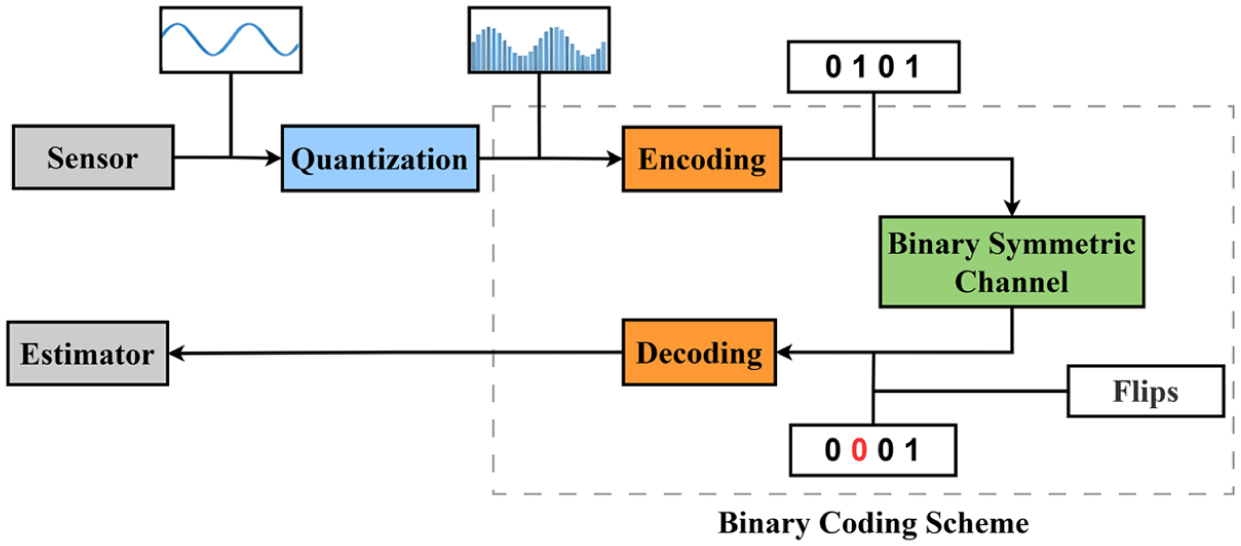
Probabilistic quantization and bit-flipping schematic diagram.
The main contributions are summarized as follows.
(1) This paper investigates the state estimation problem of nonlinear systems with binary-encoding-based quantization, bit-flipping, and heavy-tailed noise.
(2) This paper employs the normalized innovation sequence as an intermediate variable to jointly handle probabilistic quantization errors and bit-flipping errors. Furthermore, the particle filtering algorithm is applied to mitigate the interference caused by heavy-tailed noise.
(3) An improved particle filtering method is proposed and applied to the state estimation problem of complex nonlinear systems. Numerical simulations are conducted to verify the effectiveness of the proposed algorithm.
The remainder of this article is organized as follows. Section II introduces the necessary definitions and assumptions. Section III focuses on improving the particle filtering algorithm and applying it to estimate the system state. Section IV conducts simulation experiments based on the algorithm developed in Section III to demonstrate its effectiveness. Finally, some conclusions are drawn in Section V.
Notation:
Problem formulation
Consider the following nonlinear dynamic system,


where (1) is the state transition equation,
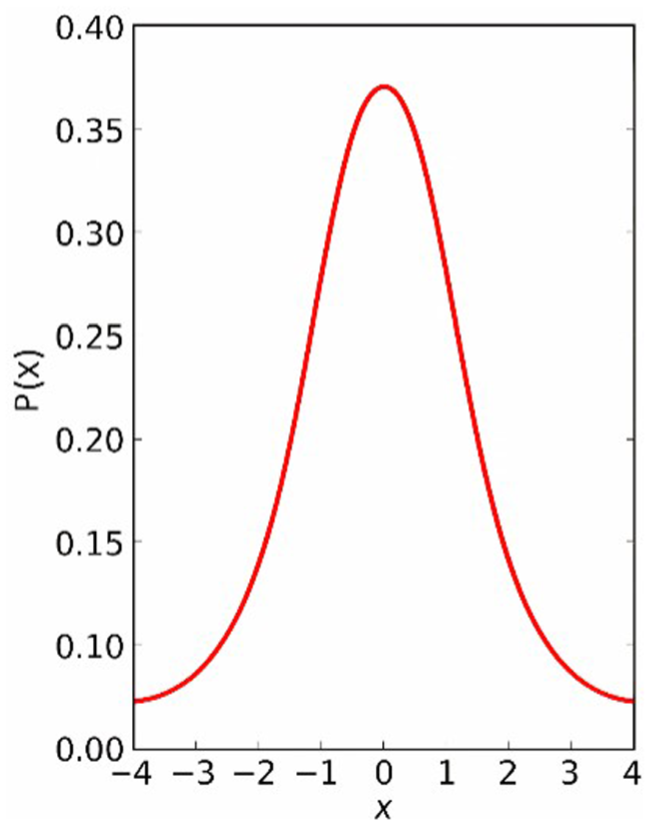
Heavy-tailed distribution image.
Probabilistic quantization model
During the transmission of sensor data, a probabilistic quantizer is employed to convert the original information into a finite-length binary code 35 :

where

in which bk,n denotes the nth component of the vector b
k
, with
To simplify the analysis, assume that bk,n belongs to the interval
When

where

Therefore,

where
Bit-Flipping model
During the transmission of the bit string Dk,n over a memoryless Binary Symmetric Channel (BSC), bit-flipping may occur due to channel noise and other complex factors. Thus, the final received bit string can be expressed as 35 :

where

The signals received over the time interval

Definitions and assumptions

The normalized innovation

Research objectives of this paper
The normalized innovation
Quantization errors, bit-flip errors, and heavy-tailed noise adversely affect the accuracy and reliability of signal transmission. As a result, traditional state estimation algorithms often fail to achieve satisfactory performance in such nonlinear systems. To overcome these challenges, this paper develops improved particle filtering algorithms to enhance estimation accuracy and system stability.
State estimation based on particle filter
Design of the improved particle filter algorithm
Assume that the particle set at time k−1 is
Based on the state transition model (1), the predicted particle

Accordingly, the predicted mean
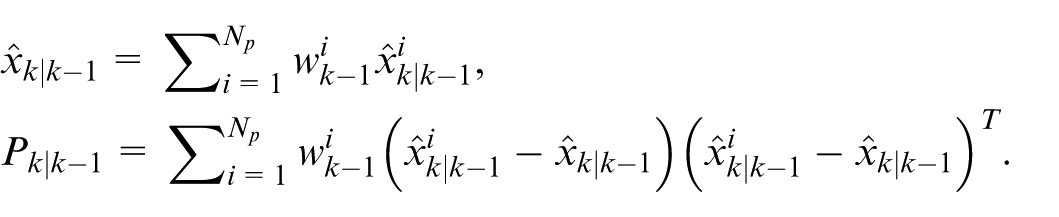
Consequently, the predicted observation
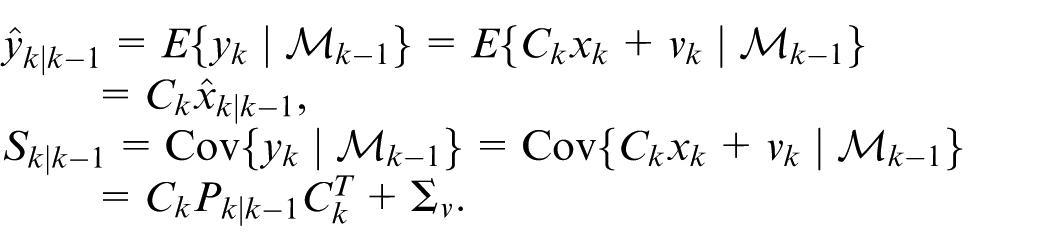
Furthermore,
Taking

in which
However, during the transmission over a memoryless BSC, τ j may undergo bit-flipping. Therefore, the final received signal is

The vector
Based on Bayes’ rule, 43 the Monte Carlo method is used to approximate the prior probability density function
Combined with Bayes’ formula, the posterior probability density function can be obtained

where
Subsequently, according to the Monte Carlo approximation, the posterior probability density
where
In particle filtering, particles
Algorithm flow table.
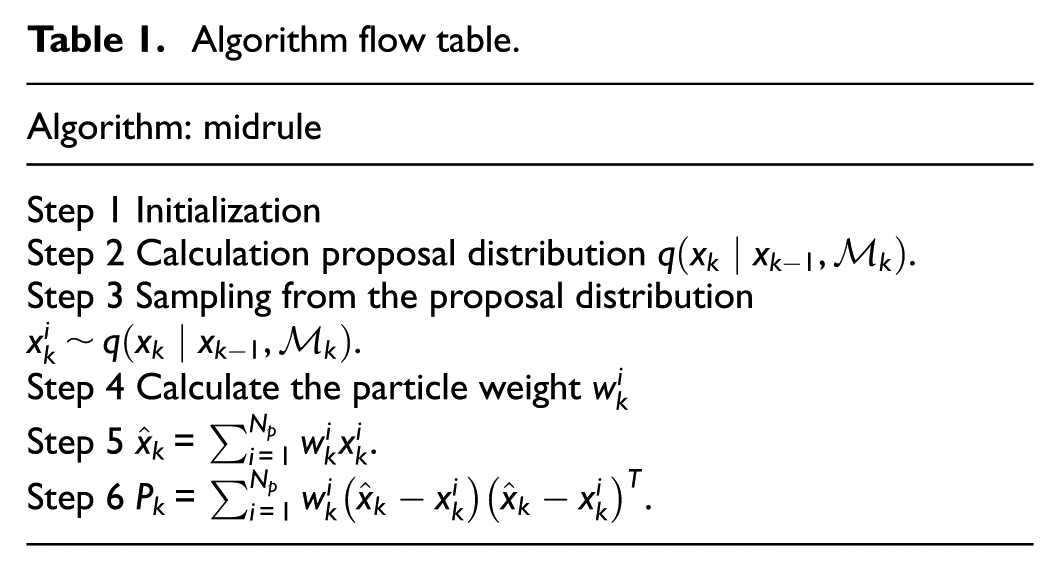
Proposal Distribution Design
The proposal distribution is a probability distribution used to generate new particles during the iterative process of particle filtering.
In this work, we adopt a Gaussian approximation of the posterior probability density function as the proposal distribution

The iteration of the probability density is simplified to that of the mean and covariance. In addition, the joint probability density of the state x
k
and the measurement

where


specifically, the innovation vector and its covariance are defined as
Additionally, the coefficients α i and β i are computed as:

furthermore, we have:


with
The design of the proposal distribution mainly consists of two parts: designing its mean and designing its covariance. Among these, the derivation process for calculating the mean of the proposal distribution is presented in the section “Solving for the Mean in the Proposal Distribution”, while the derivation of its covariance is presented in Section “Solving for the Covariance in the Proposal Distribution”.

Since the events
The proposal distribution is designed by determining its mean and covariance. The derivations for both are provided in the subsequent sections. Prior to the derivations, two lemmas are presented in this paper.

Solving for the mean in the proposal distribution
We start to calculate the mean

Since the normalized innovation sequence


In addition, the joint distribution of the state x
k
and the normalized innovation sequence
Since the state x
k
and the measurement noise v
k
are independent, it follows that
The covariance matrix
According to the formula

Therefore, the conditional expectation
Combined with equation (7), by evaluating the expectation

Then, we only need to calculate
Note that the conditional expectation

According to Lemma 1, we derive the expectation
where
Since
In addition, since

where
where
According to Lemma 1, we have
where
In the subsequent calculations, we first evaluate the probabilities

Given that

Moreover, the conditional probability of
Given the specific situation of
In addition, we also have
Therefore, we can derive the following result
in which
To simplify the notation, we define
Accordingly, the probability

In a similar manner, we define
with the corresponding probability
Furthermore, we denote

in which the auxiliary function

Next, we calculate the expectations
According to the formula for calculating the mean in probability theory, we can obtain
Applying the same reasoning, we derive
By substituting (14) and (15) into (13), we can simplify the expression as follows

where
In particular, when j= 1, the expectation

and when j = 2 L , it reduces to

Hence, the function
In addition, the function
Let
Therefore, (9) can be rewritten as

where
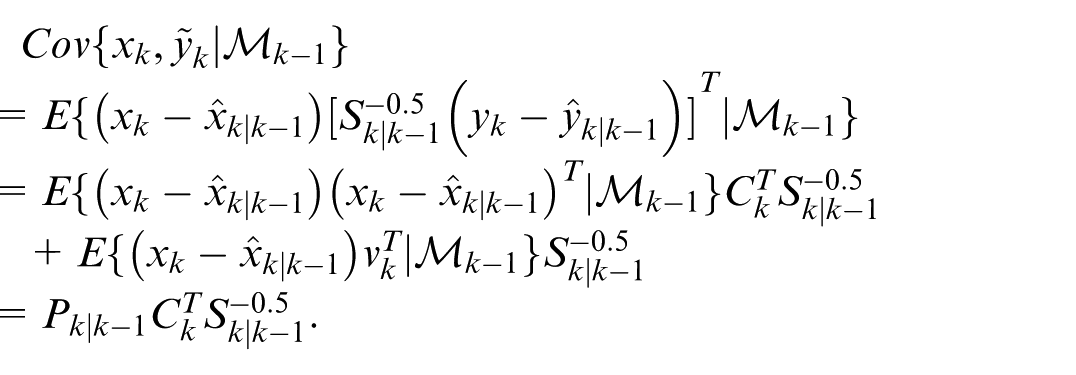
Solving for the covariance in the proposal distribution
We next compute the covariance
According to (8) and (9) the estimation error

By Lemma 2, it follows that

Since under the condition
Meanwhile, since the first term after the equal sign in (19) is the covariance of
Combining (18), (19), and (20), we obtain

where

Since the normalized innovation sequence
Next, we calculate the moment
and for
Finally, similar to the calculation method of the first moment

where
Next, we define
where

Define

Update of particle weights
The particle weight can be determined by calculating the ratio of the true posterior probability density to the proposal distribution. From (4), the particle weight update is given by the following formula

Since the proposal distribution
It follows from probability theory that

where

where the probability
It is easy to obtain

where


In addition, since the set
in which

Particularly, when j= 1, the expression can be simplified to the first integral term in (23). When
If we define

in which
Finally, the corresponding particle weights at time k can be obtained from (21).
According to the particle weight update in (21), a set of unnormalized weights can be calculated, and subsequently normalized such that their sum equals 1.
Therefore, at time k, particles are obtained through the proposal distribution

Here,
Convergence analysis
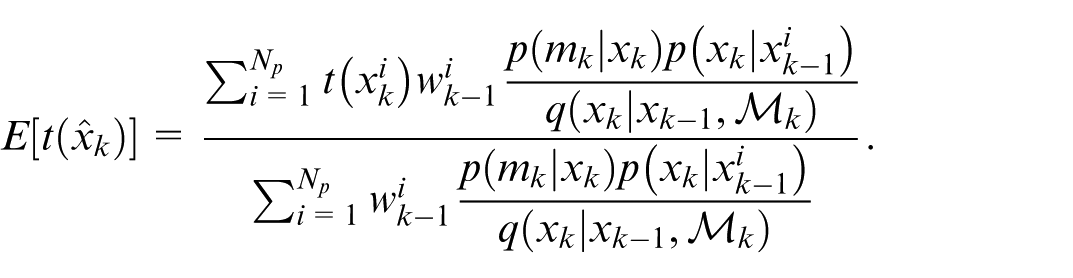
According to the given algorithm, the expectation of an arbitrary function

By substituting the particle weight update (21) into (24), we have
According to the Monte Carlo approximation, when the number of particles N p is sufficiently large, the discrete sum of particles can be transformed into an integral form. Therefore, it follows that
After further simplification, the expectation becomes

Finally, substituting (3) into (25) and simplifying, we obtain

According to the Central Limit Theorem, the Monte Carlo approximation converges as the number of particles increases (i.e.
Specifically, based on Theorem 2 and Theorem 3 in the stability analysis (Section C, Section 4 of
35
), we can obtain that the upper bound of the covariance
Thus, it can be shown that the algorithm designed in this paper has a favorable and stable estimation effect, and the obtained estimation result can converge to the estimate of the minimum mean square error.
Numerical simulation
In this section, the performance of the proposed method is evaluated through a target tracking example. Assume that there are four range-measuring sensors, whose positions are as follows: Sensor 1 is located at (0 cm, 0 cm), Sensor 2 at (0 cm, 120 cm), Sensor 3 at (120 cm, 0 cm), and Sensor 4 at (120 cm, 120 cm). The motion of the target is modeled using the Constant Turn (CT) model described below:
where

where λ is the scale factor and
Next, the Root Mean Square Error for position (RMSEp) estimation is defined 43
where ρ= 200 is the number of Monte Carlo simulation runs.
With the aid of Matlab, the simulation results are presented in Figures 3 to 6.
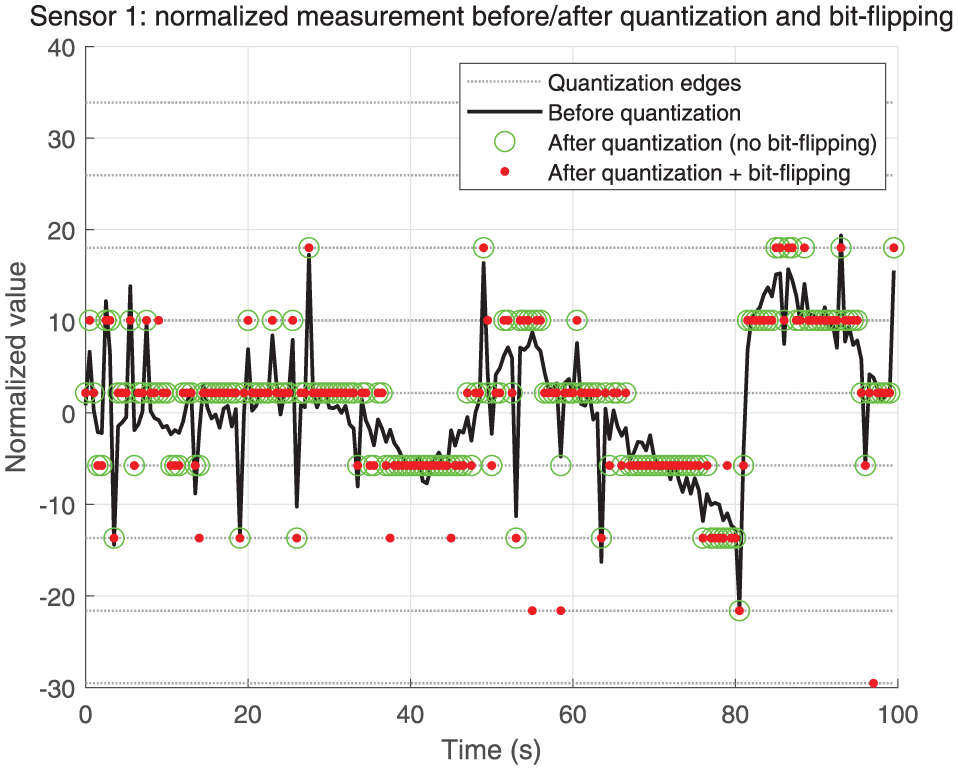
Sensor 1: normalized measurement before/after quantization and bit-flipping.
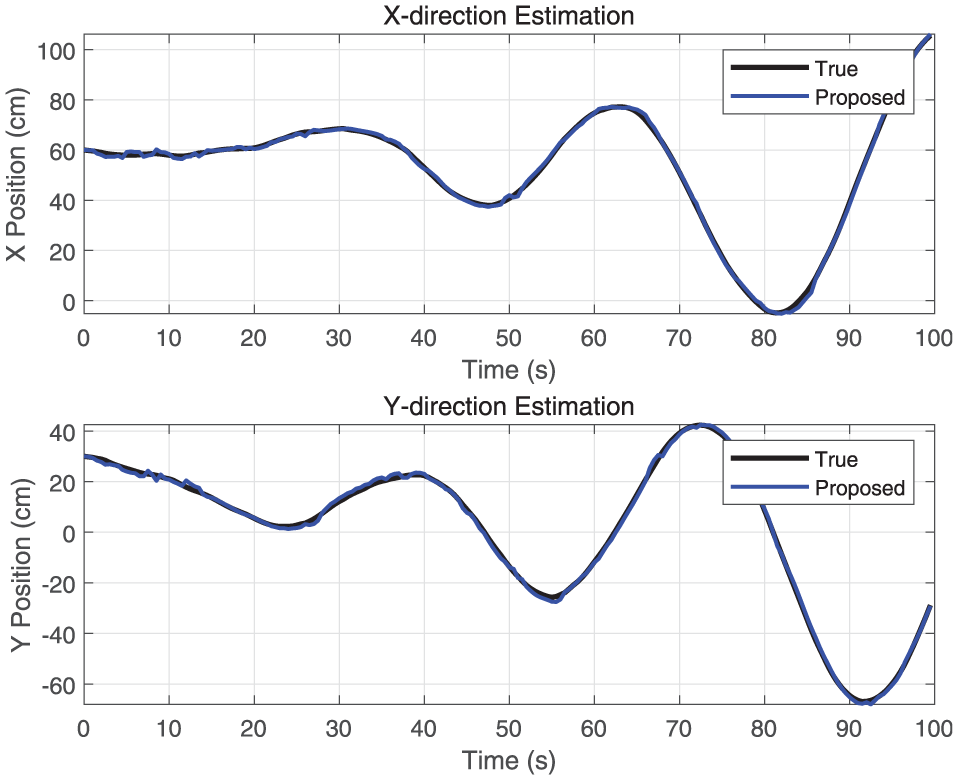
x & y Axes: estimated versus true states.
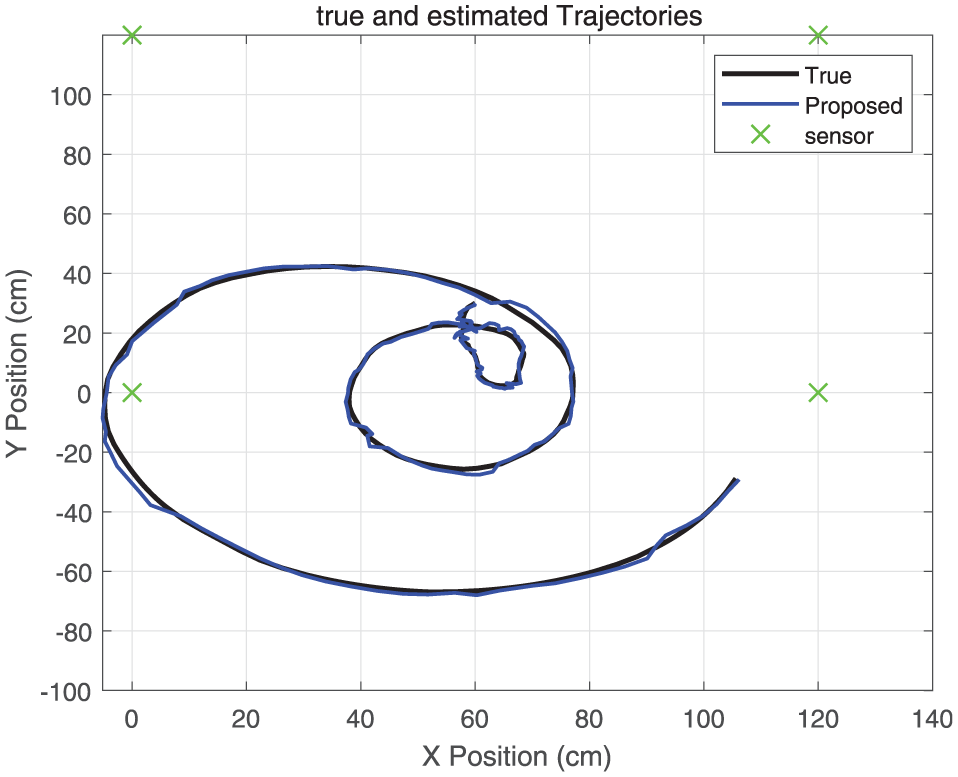
xoy Plane: estimated versus true states.
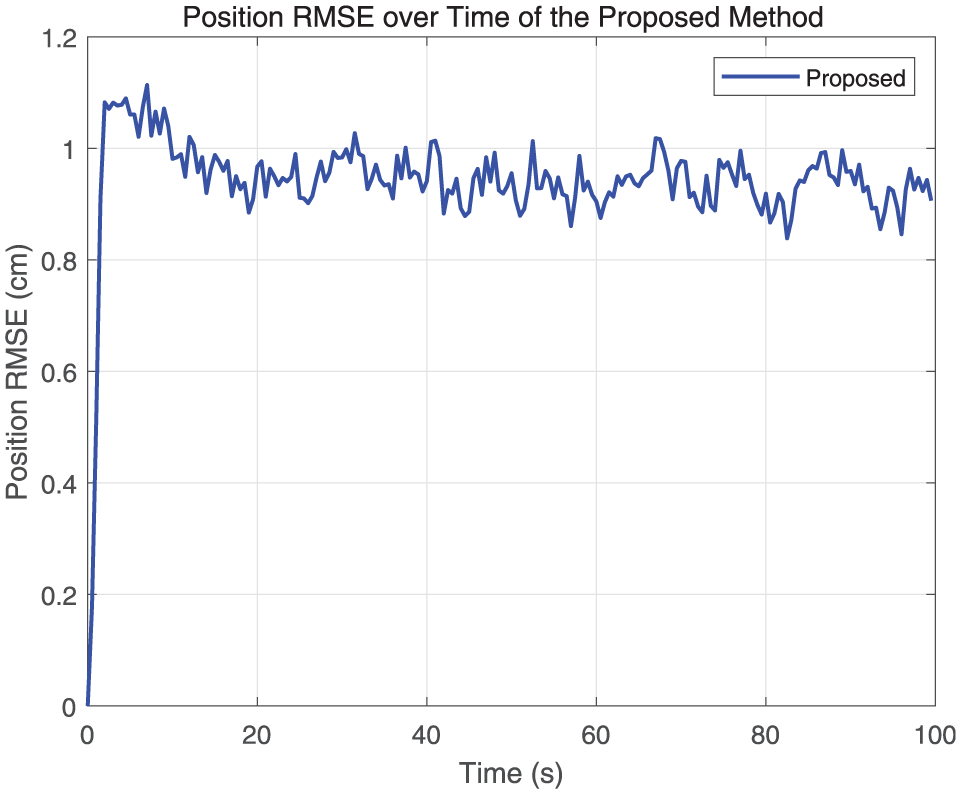
RMSEp curve.
As can be observed from Figure 3, the amount of information after probabilistic quantization is significantly smaller than in the case without probabilistic quantization. Meanwhile, some transmission errors are introduced due to bit-flipping. Figures 4 and 5 intuitively demonstrate the dynamic comparison between the true system states and the estimated states obtained by the improved particle filtering algorithm. These figures present a multidimensional comparison of the true trajectories of the system state variables and the estimated outputs provided by the improved particle filter algorithm. Figures 4 and 5 clearly show that, under the combined effects of quantization errors, bit-flipping, and heavy-tailed noise, the estimated trajectories from the improved particle filter closely follow the actual state trajectories. Whether during the acceleration or deceleration phases of the target’s motion, or at abrupt turning points, the algorithm consistently tracks the underlying state with high accuracy.
Figure 6 provides a quantitative evaluation of the Root Mean Square Error (RMSE) associated with the improved particle filtering algorithm. By plotting the RMSE over time, the figure visually demonstrates the stability of the algorithm’s performance. As shown in Figure 6, the proposed algorithm exhibits strong real-time responsiveness and maintains a high level of estimation accuracy, even in complex environments and over extended operational periods.
In summary, the proposed algorithm demonstrates excellent estimation performance for nonlinear systems subject to quantization errors, bit-flipping, and heavy-tailed noise.
Conclusion
This paper investigates the problem of state estimation for nonlinear systems in the presence of binary-encoding-based quantization, bit-flipping, and heavy-tailed noise. First, considering the limitations of traditional estimation methods under such complex conditions, the particle filter is selected as the basis for algorithmic improvement. The state estimation is performed using Bayes’ formula combined with Monte Carlo simulation. To address the commonly encountered particle degeneracy issue in particle filtering, a Gaussian approximation of the posterior probability density function is adopted as the proposal distribution, thereby enhancing the algorithm’s stability. In the process of designing the proposal distribution, a normalized innovation sequence is defined to effectively handle the effects of quantization errors and bit-flipping. This sequence serves as a bridge for incorporating the effects of quantization and bit-flipping into the estimation process. Based on this construction, the mean, covariance, and likelihood function of the proposal distribution are derived, enabling the design of a complete proposal distribution. Subsequently, particles are sampled from this distribution, and an updated formula for particle weights is derived. Finally, the optimal state estimation is obtained by computing the weighted sum of the particles. Future work may also explore the integration of adaptive quantization bit allocation into the state estimation framework, aiming to balance communication bandwidth efficiency and estimation accuracy more flexibly under dynamic network conditions.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.