
Abstract
In this study, the problem of adaptive predefined-time trajectory tracking for mobile manipulator (MMR) subject to external disturbances and full-state constraints is addressed. Firstly, a novel ESN observer (ESNO) with guaranteed predefined-time convergence is proposed, incorporating an adaptive error compensation mechanism to enhance disturbance estimation accuracy. Secondly, an interval-based asymmetric prescribed performance control strategy with a tunable predefined-time prescribed performance function is developed, and its simplified structure reduces computational burden. Thirdly, a predefined-time adaptive filter is designed to avoid the “complexity explosion” problem. Finally, Lyapunov stability analysis verifies predefined-time convergence of all errors, while numerical simulations and physical MMR platform experiments verify the feasibility and superiority of the algorithm.
Keywords
Introduction
In recent years, mobile manipulator (MMR), as a kind of nonlinear system with highly coupled dynamics and non-complete constraints, has been widely applied in the fields of industry, agriculture, and healthcare.1–3 Unlike fixed-base robotic arms, MMR consist of a mobile base and a multi-jointed arm, providing greater mobility and a larger workspace area, which allows the mobile arm to be used in a wider range of tasks. 2 However, high-precision interactive tasks coupled with modeling uncertainties and external disturbances impose considerable challenges to the robust performance of MMR. 4 To address the trajectory tracking problem of mobile robotic arms, some classical nonlinear control methods have been applied so far, such as backstepping, neural network adaptive control, 5 computed torque control, 6 sliding mode control,4,7,8 and model predictive control. 9 With the increasing complexity of tasks in precision manufacturing and service robotics, higher demands are placed on both transient performance and operational robustness of mobile manipulator arms. While existing control methods can guarantee steady-state tracking accuracy, key challenges persist in simultaneously achieving overshoot suppression and disturbances rejection during dynamic transitions under coupled uncertainties.
Commonly, tracking control strategies for mobile robotic arms are classified into integral control and modular control. 10 In the literature, the MMR non-fully mobile platform and the fully mobile robotic arm are viewed as separate entities, and separate controllers are designed for each subsystem. 11 This method of treating the system coupling between the MMR mobile platform and the robotic arm as a perturbation provides an effective solution to the overall control problem of MMRs. By integrating observer and adaptive techniques, a finite time convergence controller is designed. 12 Nevertheless, observation error and adaptive error cannot be avoided simultaneously. Subsequently, the integration of adaptive control with backstepping techniques was explored, addressing the MMR tracking problem from different perspectives.13,14 To further improve the tracking performance, some scholars have also considered compensating for the effect of estimation error on the system by adding a compensator. 15 Note that all the above methods can only realize the finite time or asymptotic stabilization of the system. Crucially, for both finite-time and asymptotic convergence, a large initial error inevitably leads to extended convergence times and can even induce system singularity.8,11,16 Based on this, fixed-time convergence methods, which require less initial state of the system and improve the convergence speed and accuracy of the system, have been widely employed.17,18 Unfortunately, the convergence time is heavily dependent on the controller parameters and is prone to potential singularity problems. The above problem is avoided by utilizing inequality deflation technique and power finger transformation technique. 19 Meanwhile, utilizing the inequality scaling technique also brings about a more conservative system convergence time. After that, the study of predefined time convergence well compensates the shortcomings of fixed time convergence theories.20,21 It has rarely been considered for the control of MMR.
Note that pursuing a faster convergence rate inherently amplifies overshoot in the controller’s torque output, thereby resulting in degraded tracking accuracy due to error overshoot propagation through the closed-loop system. 22 Fortunately, scholars’ extensive research on output constraints has enabled the overshooting of the tracking error to be kept within the prescribed interval in time when the control inputs become too large. Currently, conventional barrier Lyapunov function (BLF)-based methods, prescribed performance control (PPC)23–25 and model predictive control (MPC) 26 are the main strategies. A trajectory tracking control strategy for mobile manipulators based on the adaptive PD method is proposed by using prescribed performance function (PPF), and decent control performance is obtained. 27 A controller for MMR by incorporating a time-varying prescribed performance function within a predetermined-time stabilization strategy, thereby enhancing both steady-state and transient performance. 28 However, only constraining the position tracking error was considered while neglecting coupled velocity-state limitations.
As a recurrent neural network (NN), the echo state network (ESN) has been widely used in the control of nonlinear systems due to its excellent approximation performance for nonlinear functions.29,30 Although ESN exhibits potential in dynamic coupling approximation and disturbance observers excel in uncertainty estimation, their synergistic integration in MMR control remains underexplored, especially for scenarios demanding simultaneous multi-state constraints and non-differentiable disturbance rejection. This motivates a novel hybrid observer in this paper for realizing high-precision control of MMR.
Inspired by previous studies, this paper systematically addresses the trajectory tracking control problem of the MMR system subject to external disturbances, all-state performance constraints, and operational scenarios. The primary contributions of this work are summarized as follows:
(1) A novel echo state network observer (ESNO) with guaranteed predefined-time convergence is proposed to approximate the upper bound of the external disturbances and modeling uncertainties. Compared with Xing et al. 26 and Wang and Su, 31 the ESNO has a faster convergence speed.
(2) Unlike prior studies focusing solely on position constraints,27,28 an interval-based asymmetric PPC strategy with adjustable predefined-time PPF (PTPPF) is developed, enabling simultaneous enforcement of both position and velocity tracking error bounds. This enhances tracking accuracy and is particularly beneficial for MMR applications.
(3) A practical predefined-time stability theorem is established under the proposed control framework, ensuring that both system states and tracking errors converge to a predefined compact set within a predefined time. This approach eliminates initialization sensitivity and avoids potential singularity issues found in fixed-time and predefined-time controllers. 32
The effectiveness of the proposed framework is validated through detailed simulations and physical experiments on an MMR prototype, demonstrating its robustness in real-world operational scenarios.
The rest of this paper is designed as follows. The model description and some premises of MMR are given in Section II. In Section III, predefined time converged ESNO and predefined time trajectory tracking controller with full state constraints are given. Numerical simulations and physical experiments are given in Section IV. Finally, Section V gives the conclusion of this work.
Problem formulation and preliminaries
A two-link mobile manipulator is shown in Figure 1.
33
The two rear wheels of the mobile platform are driven by independent motors, and a two-link robot arm is installed at the center of mass

where

and (2) can be rewritten in the following vector form:

where

where the matrix

where
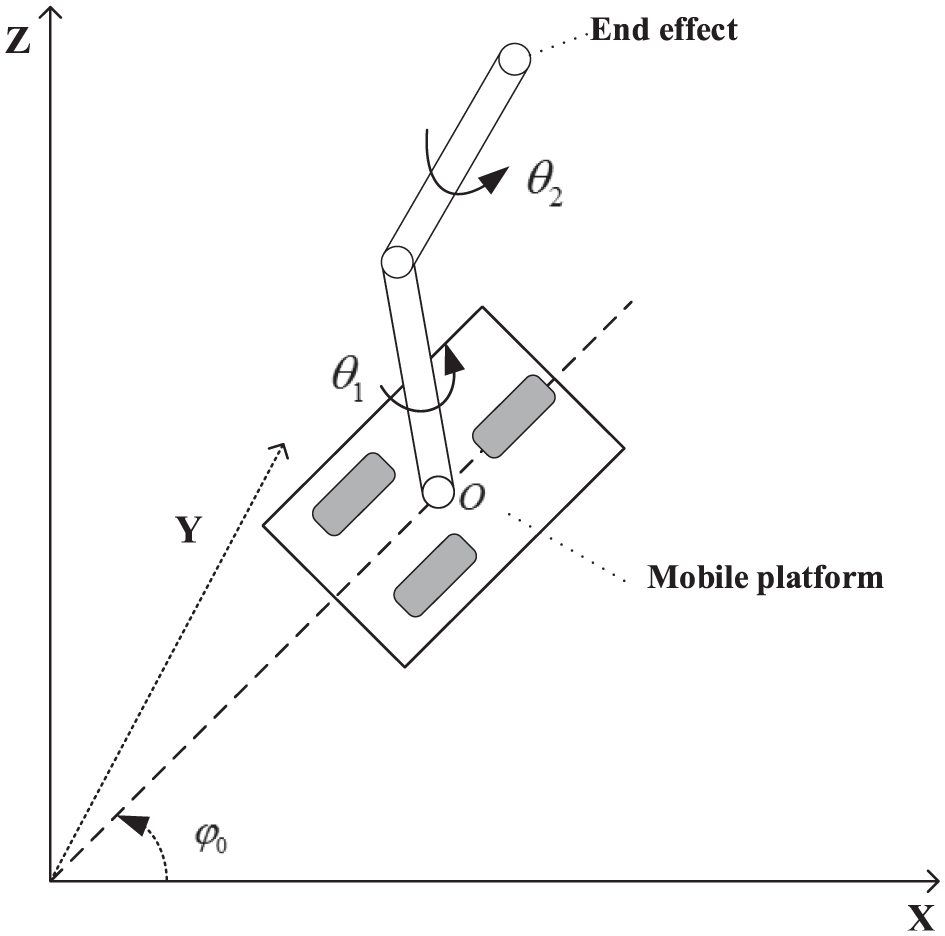
Two-link MMRs in the coordinate system.
Then the MMR dynamic model (4) and (1) can be rewritten as

in which
In the generalized coordinate system, the chassis position vector of the MMR and the trajectory of the end manipulator arm

where


where


is satisfied.
The position tracking error

where
To make the tracking performance have a specified transient performance, the performance constraint on the error

where
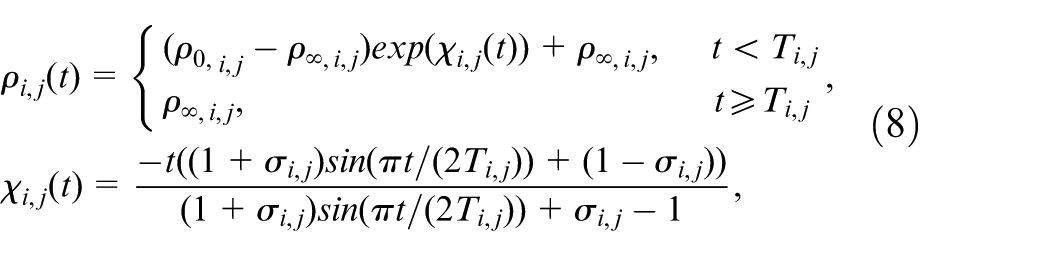
in which
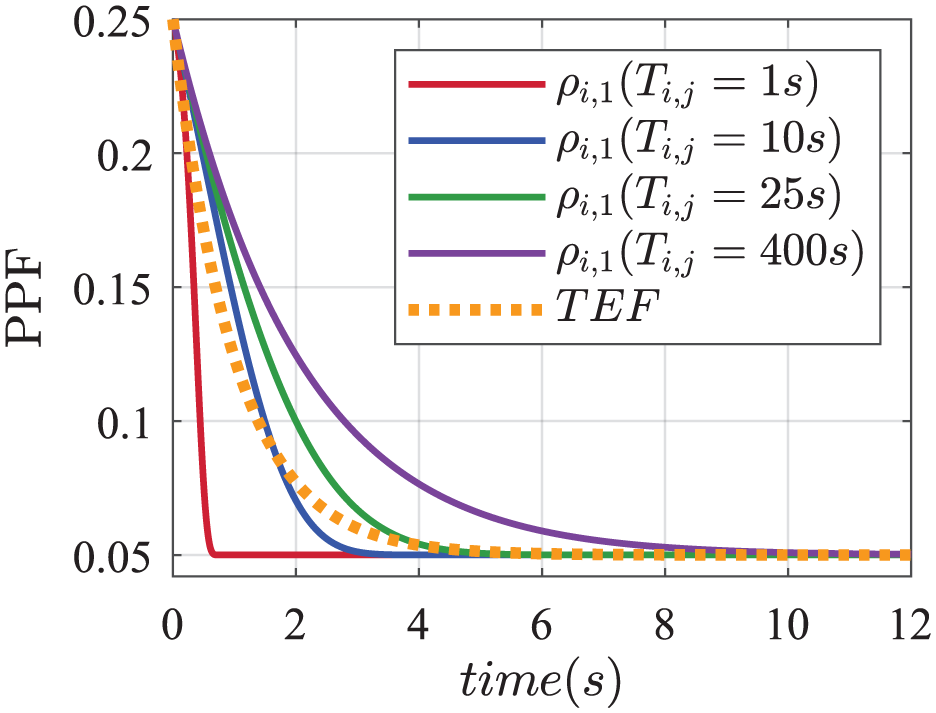
Performance comparison between PTPPF and TEF.
To transform the system with constraint condition into an equivalent unconstrained system, a transformation function is designed as

in which

where

with

Unlike the traditional PPC control proposed by Dou and Wen,
39
the interval-based error transformation (10) enables constraints to be imposed on both the tracking error
The differential of

where
Controller design
Design adaptive predefined-time ESNO
According to the ability of ESN to approximate the unknown function, the ESNO is developed in this work to approximate the disturbance. Defining the observation disturbance as

where
The approximation error of ESNO is defined as
The observer is designed as:
The disturbance observation error along the
Consider the derivative of
Design adaptive predefined time controller
where
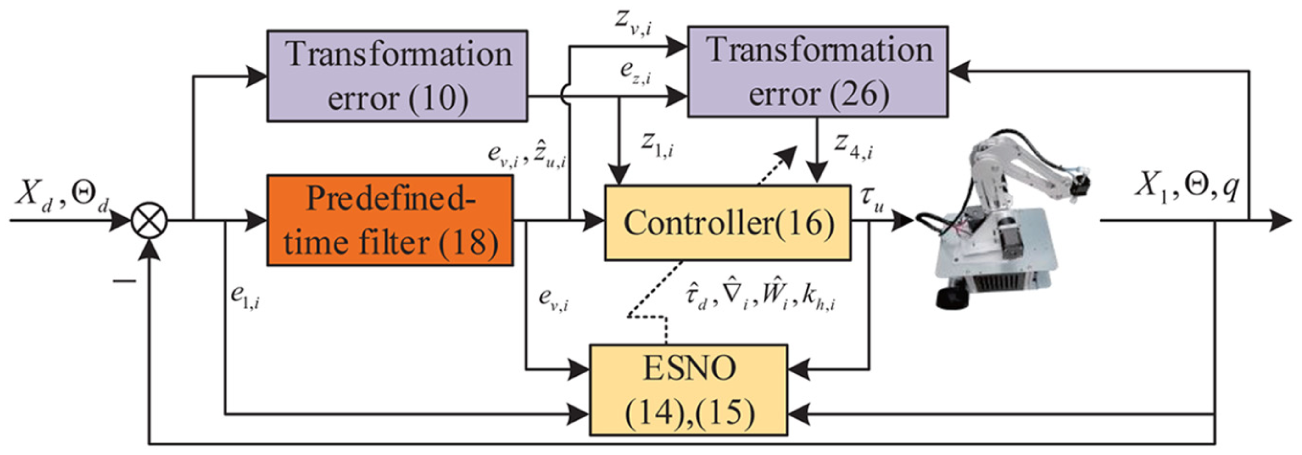
Predefined control algorithm logic diagram.
The following error auxiliary variable is constructed

where
in which
A detailed proof of the controller is given below in three steps.
Firstly, another Lyapunov function
Invoking (17) into (19), one yields
Secondly, choose another Lyapunov function
According to the Lemma 5, the following inequalities hold

Based on Lemma 4 and
Then, (22) can be rewritten as:
in which

In additions, to enhance the robustness of the formation system, the velocity error

Similarly to (10), where
Differentiating

in which

According to (9), another transformation function designed for

and differentiate it with respect to time, it has
Thirdly, construct the positive definite Lyapunov function

By taking the first-order derivative of
In light of Lemma 3, (28) can be rewritten as
According to

and the time derivative of
Based on the adaptive law (15), the novel adaptive law of the ESNO is designed as
Substituting (30) into (29) yields the following simplified expression:
In light of (21) and (34), (31) is rewritten as
where
Numerical simulations and physical experiments
In this section, to verify the robustness and transient performance of the proposed controller, simulation and physical experiments were conducted on the above model, which are named as Case Study 1 and Case Study 2, respectively. The controller and observer parameters are selected based on the stability conditions derived in Theorem 1 and Theorem 2 and the desired performance specifications.
Case Study 1: The end-effector of the mobile robotic arm and the ideal trajectory of the chassis are set as
Controller and observer parameters (param.).

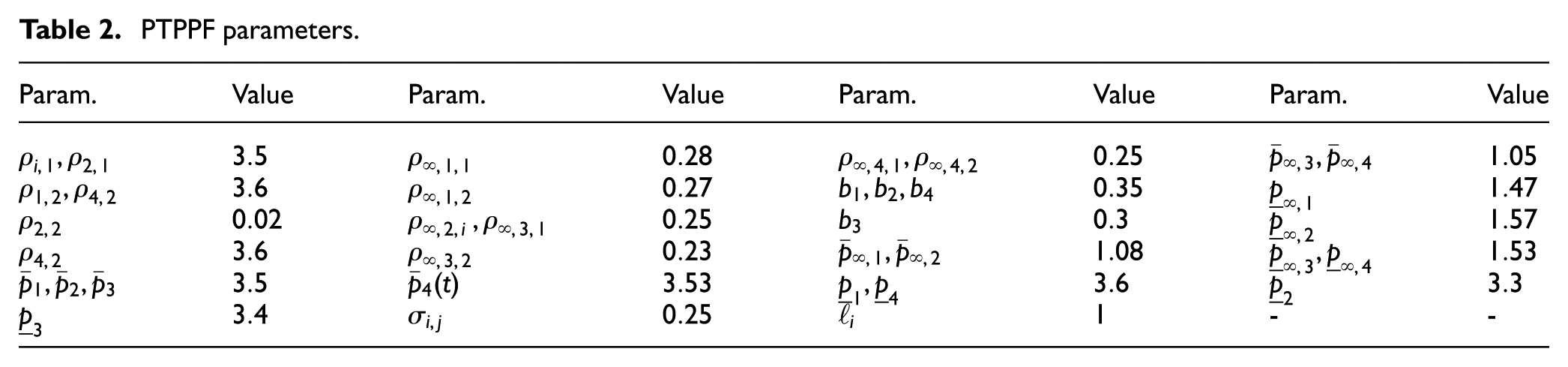
PTPPF parameters.
The external disturbance is designed as
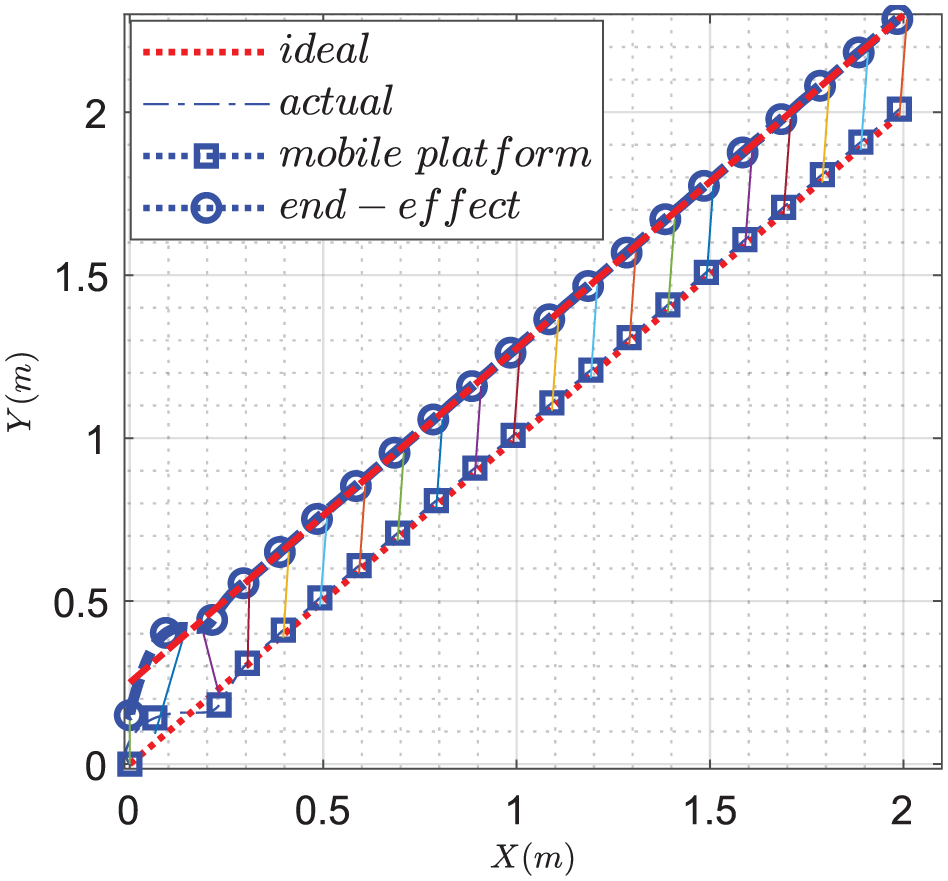
Trajectory tracking of mobile platform and end-effector.
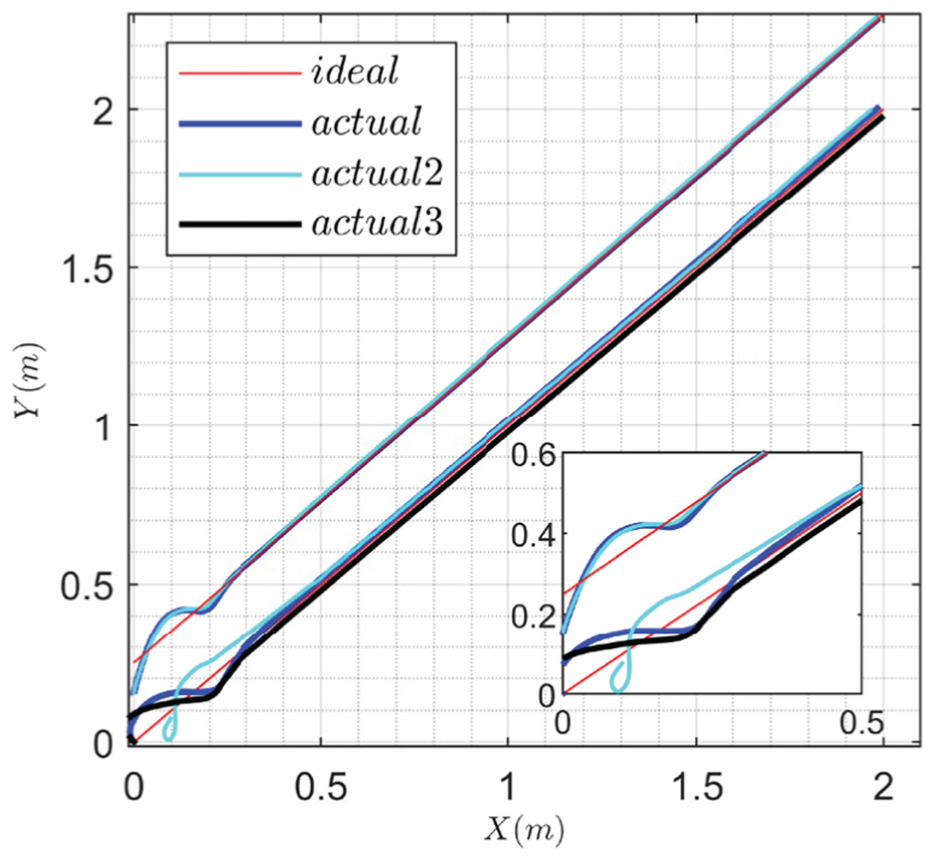
Trajectory comparison under different initial conditions.
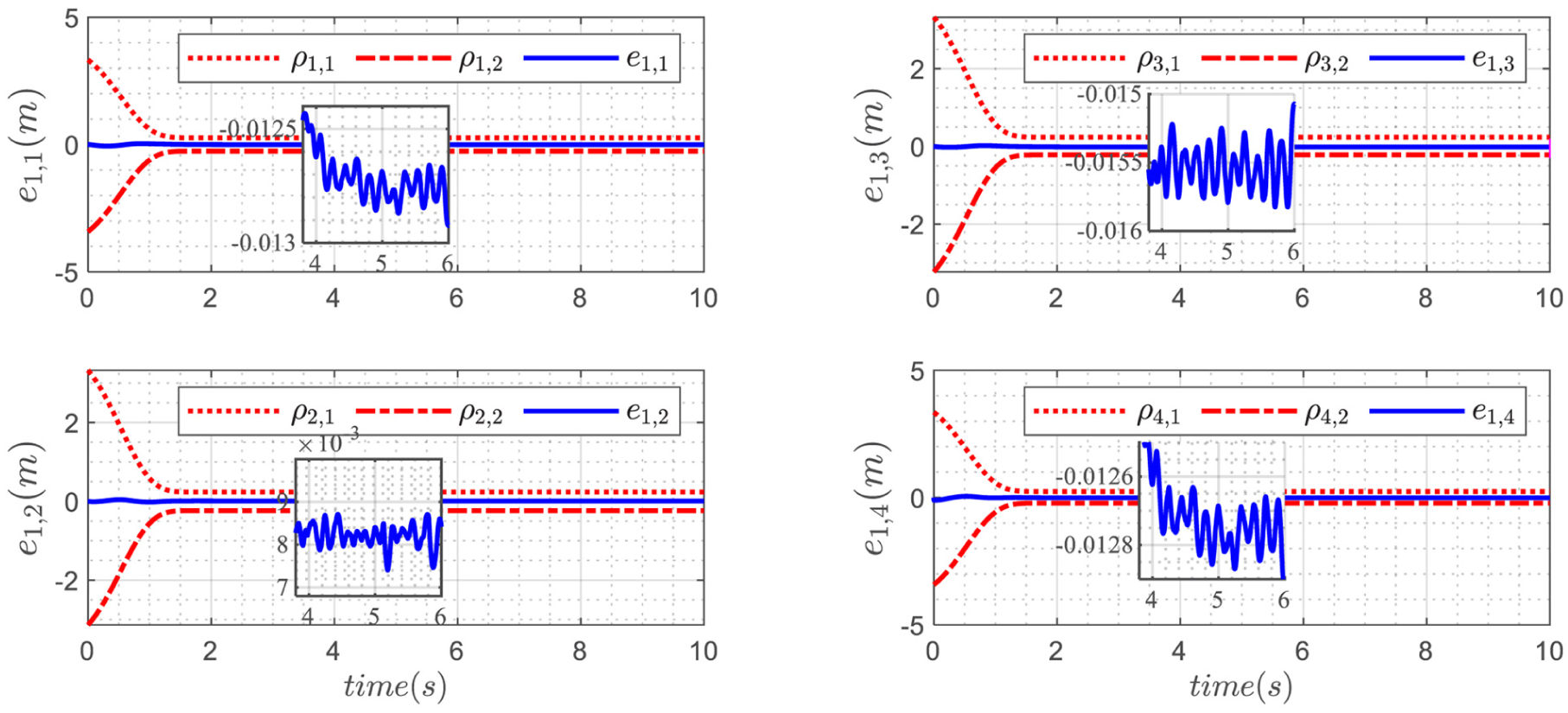
Mobile platform and End effector position tracking errors.
Transformed mobile platform and end-effector position error.
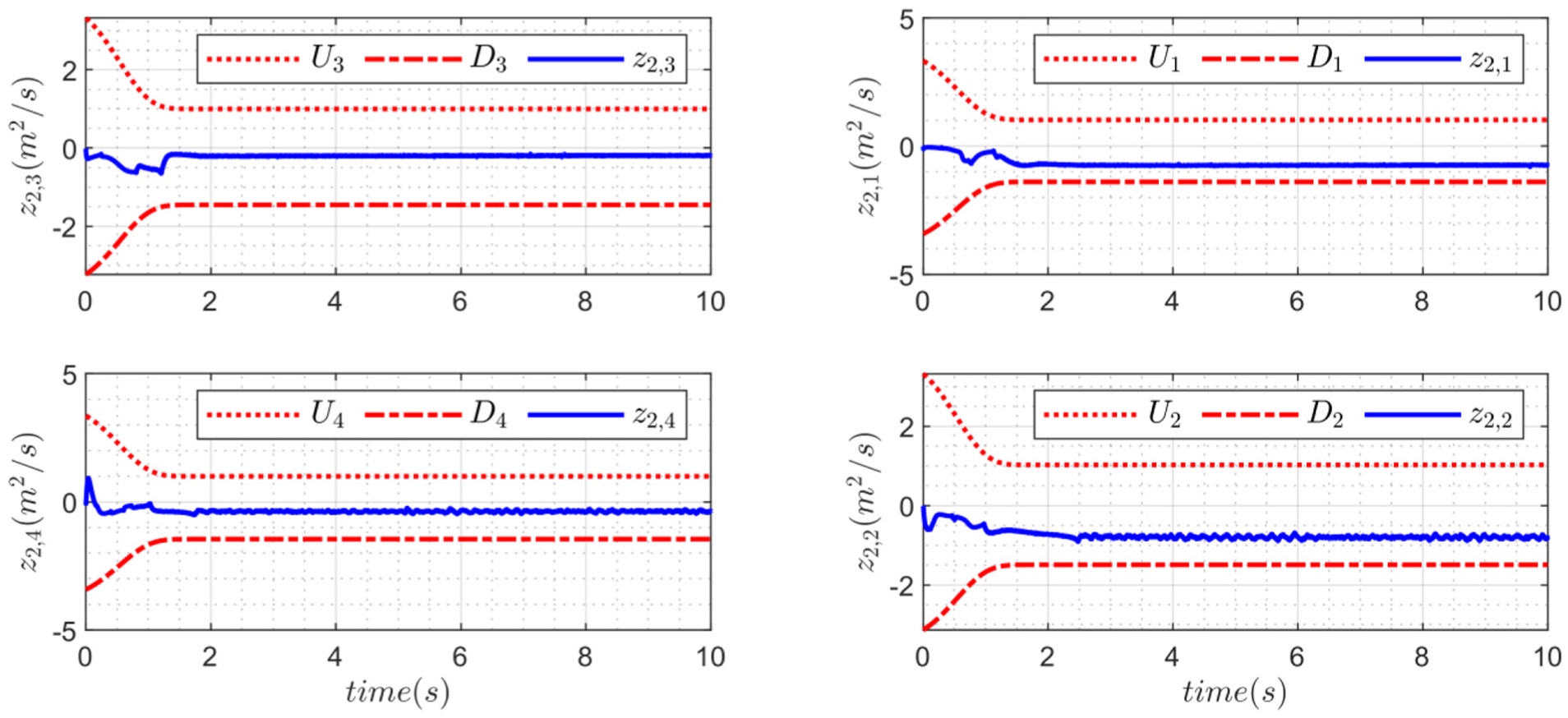
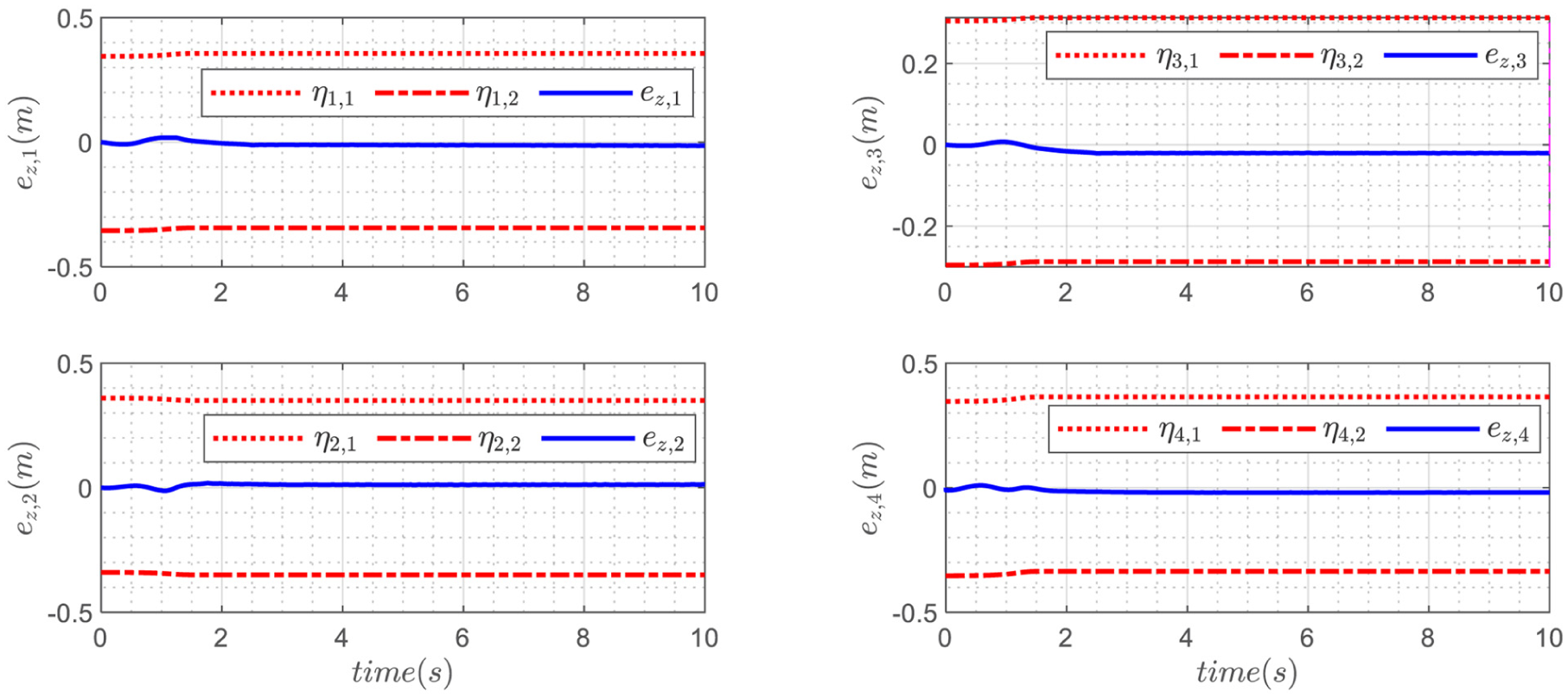
Mobile platform and end-effector velocity error.
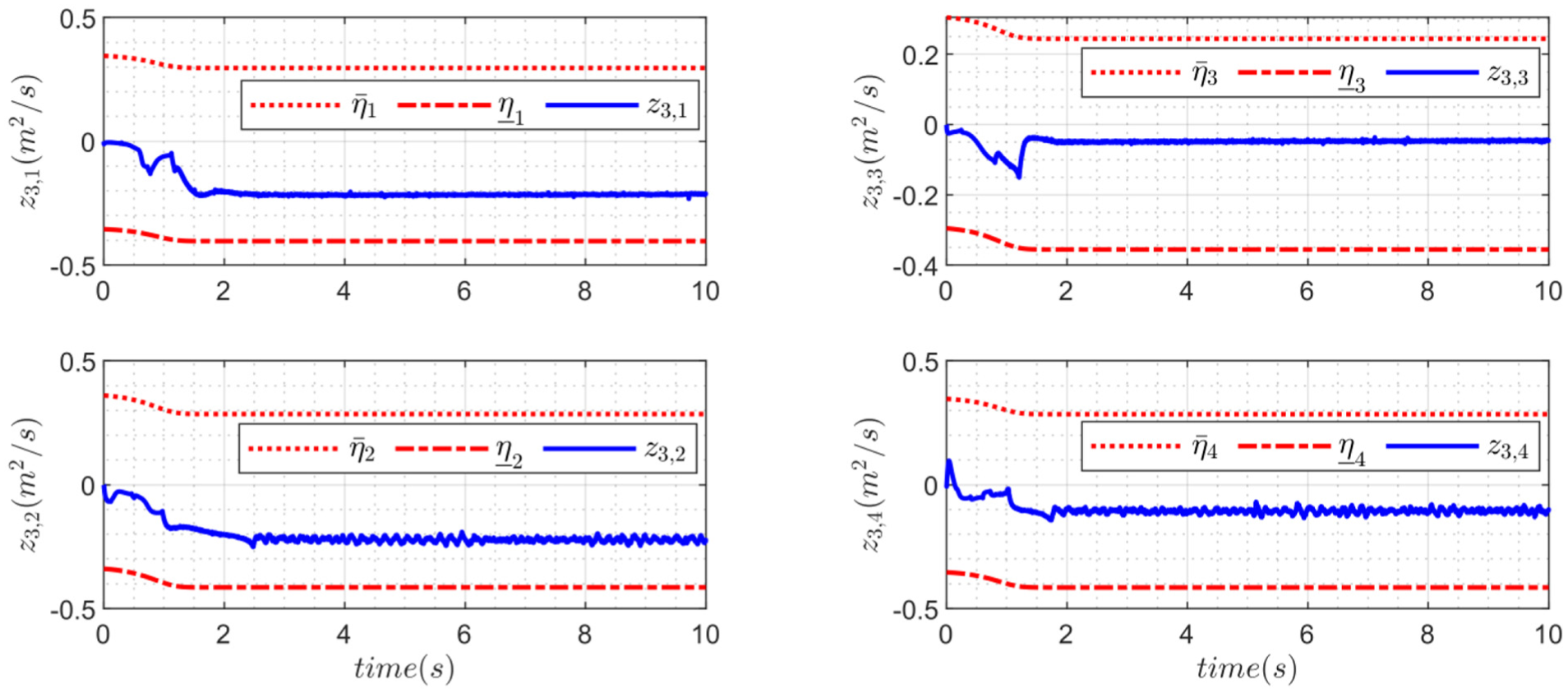
Transformed mobile platform and end-effector velocity error.
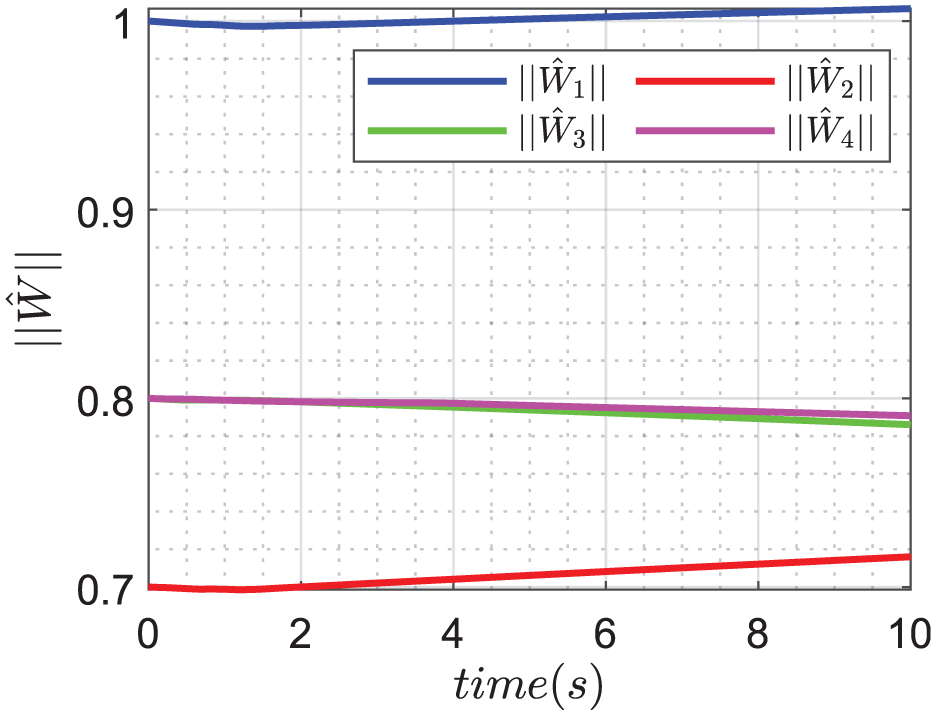
Estimates of the ESNO weight
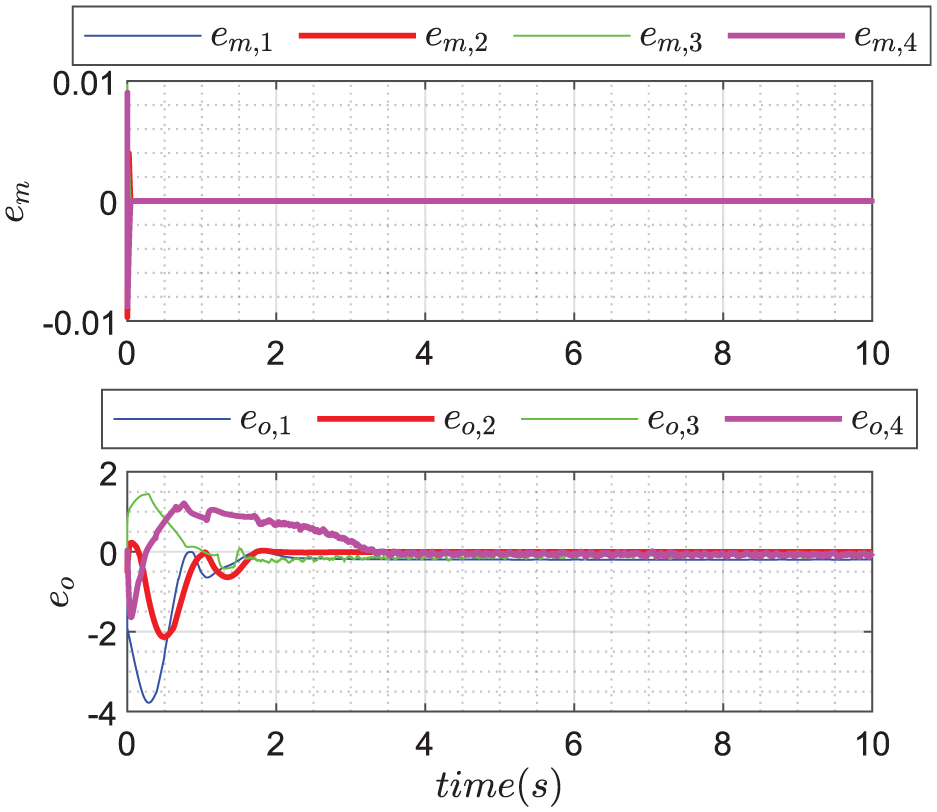
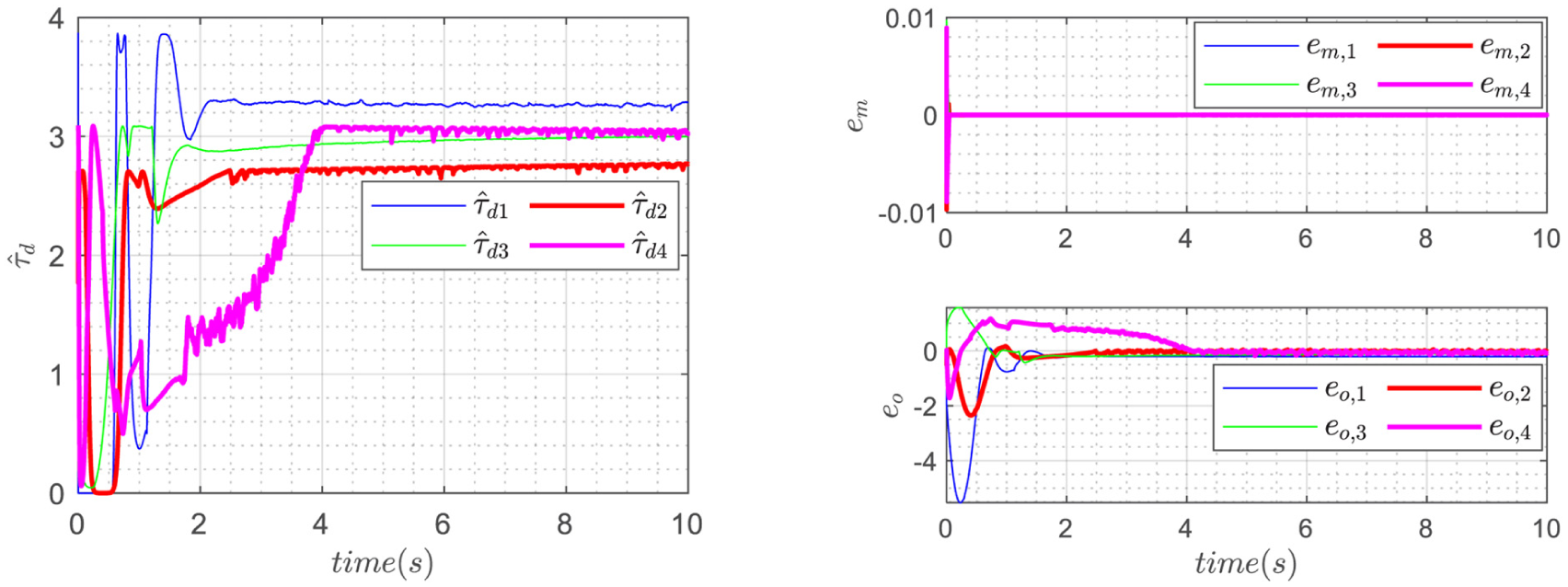
Output of the compensation system and the value of estimation error
The adaptive parameters
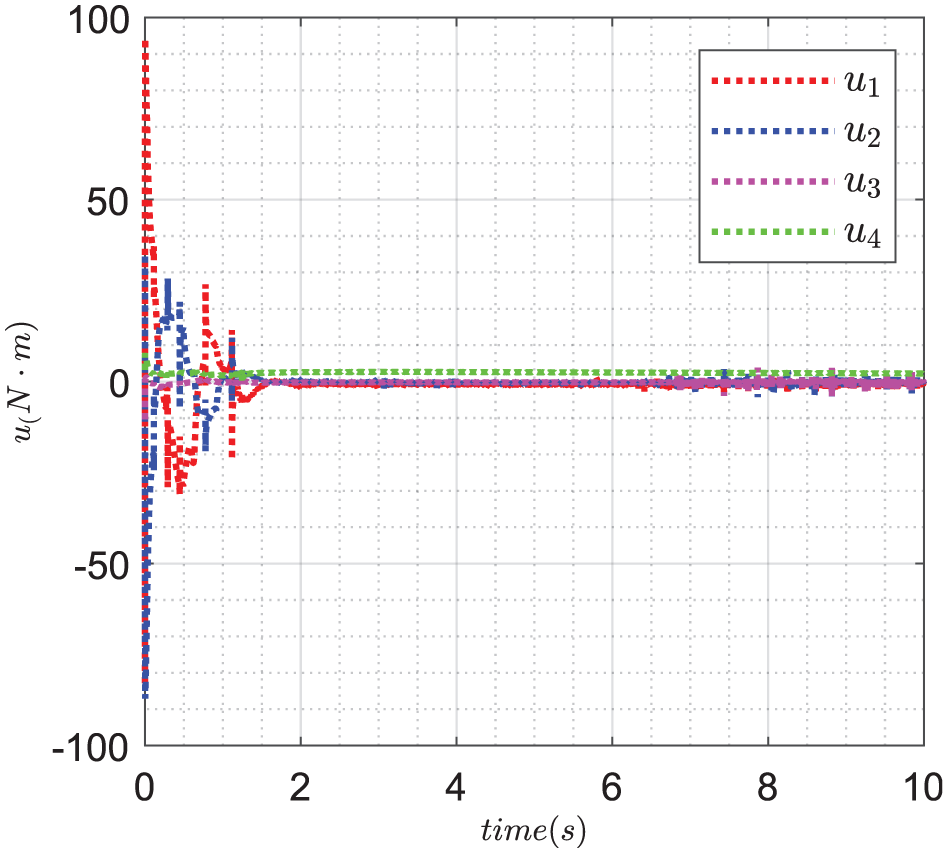
The controller output torque.
From Figure 4, it is easy to see that the end of the MMR and also the chassis are able to track the desired trajectory. A comparison by selecting any initial position in Figure 5 shows that the MMR can track the desired trajectory quickly for different initial positions. This is consistent with the advantage of predefined time stabilization independent of initial position. As shown in Figures 6 and 7, the position tracking error is constrained to the specified range and converges to within ±0.01 m in approximately
Case Study 2: The actual MMR and its control hardware are presented in Figure 14. The initial positions of the mobile platform and the end-effect were designed as
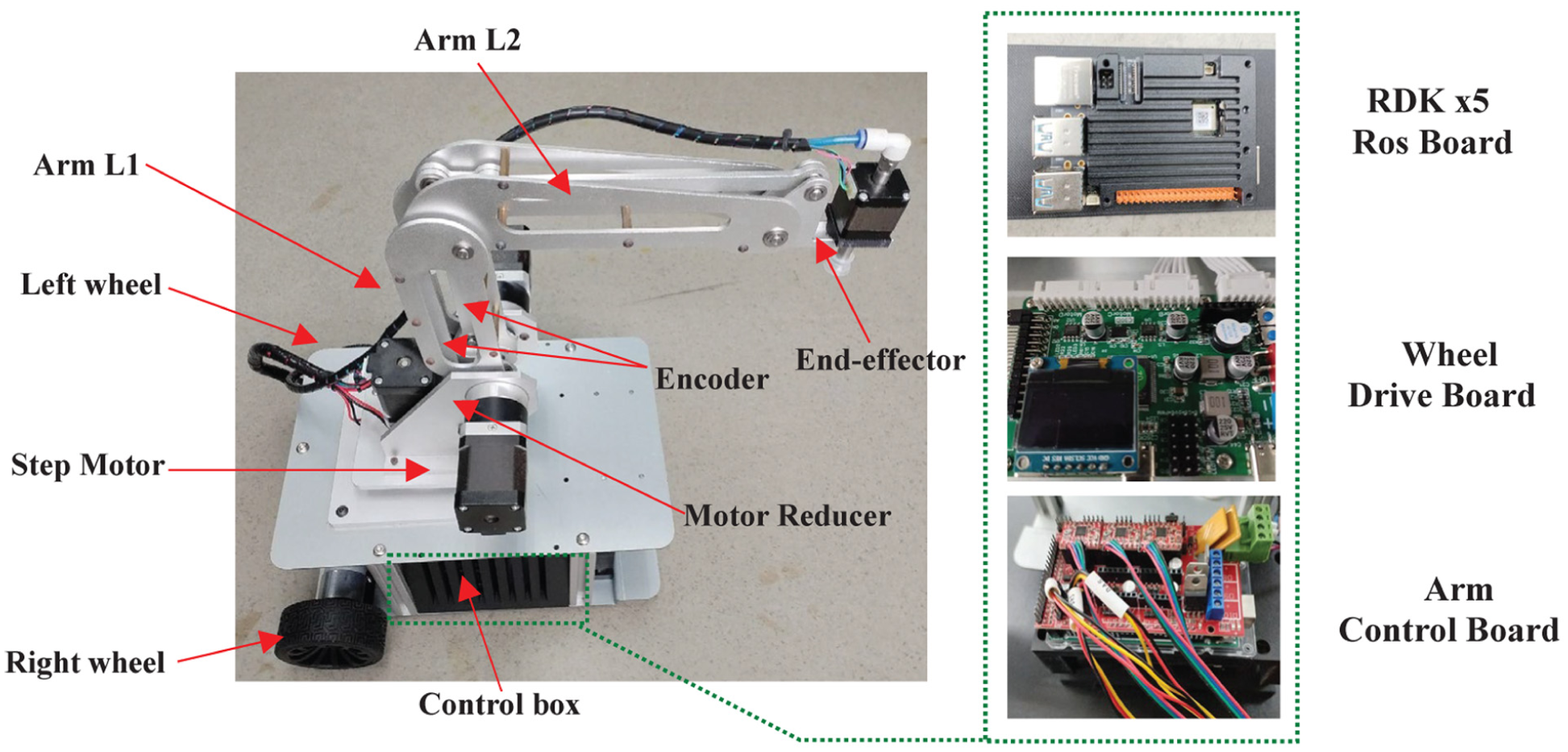
The MMR and the control hardware.
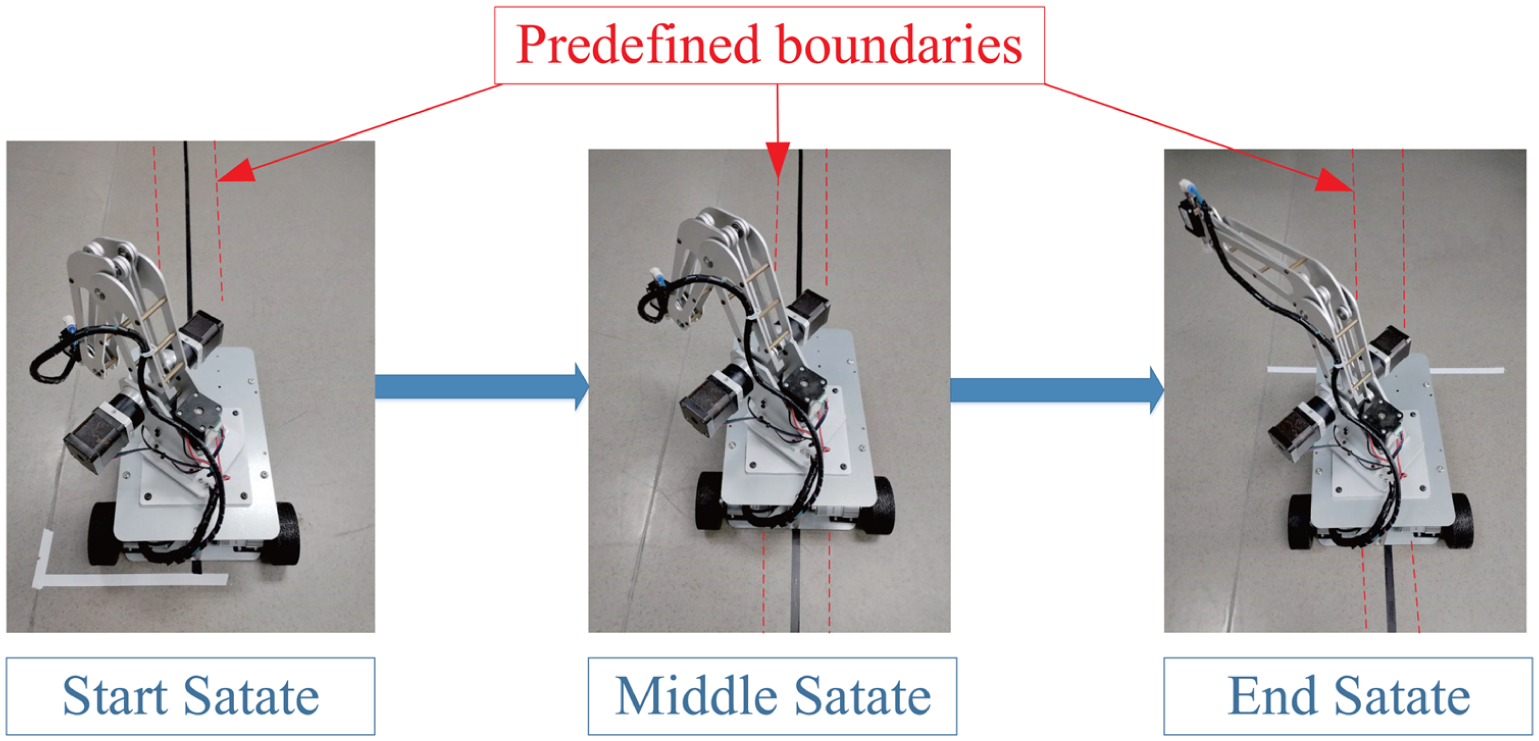
The real-world testing scenario.
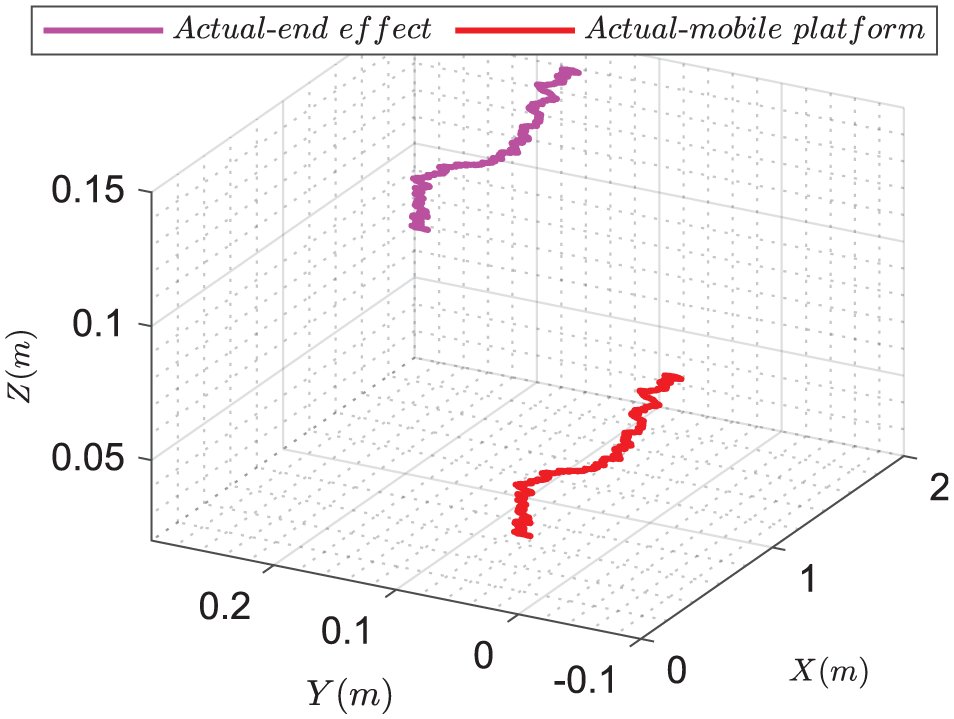
3D trajectory of the mobile platform and end-effector.
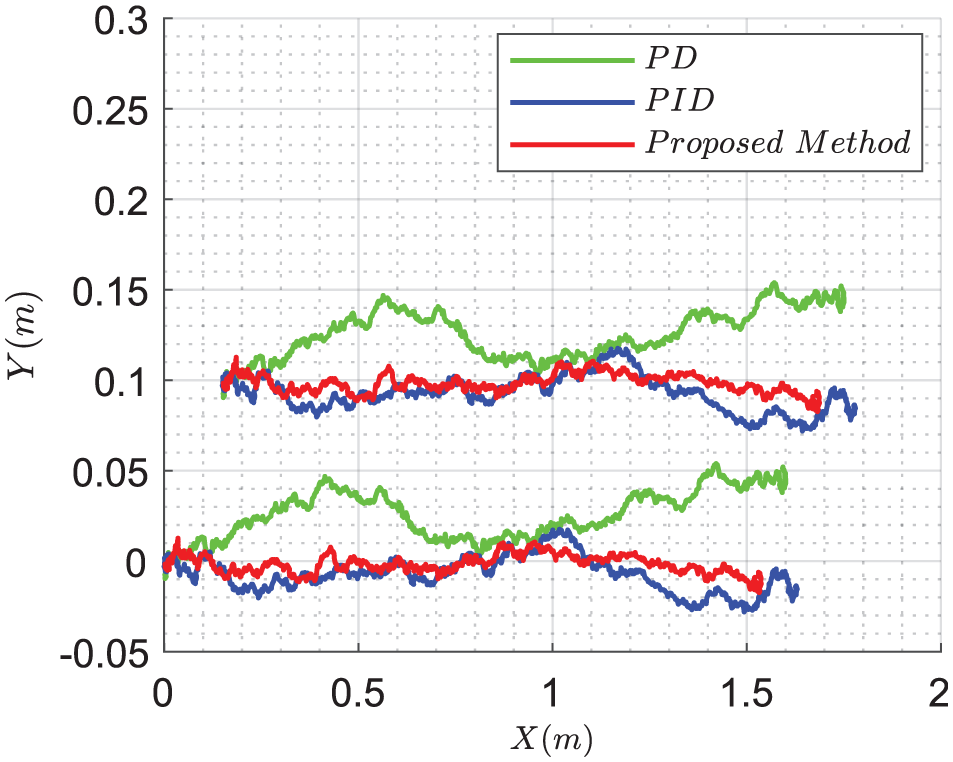
2D trajectory comparison for the MMR.
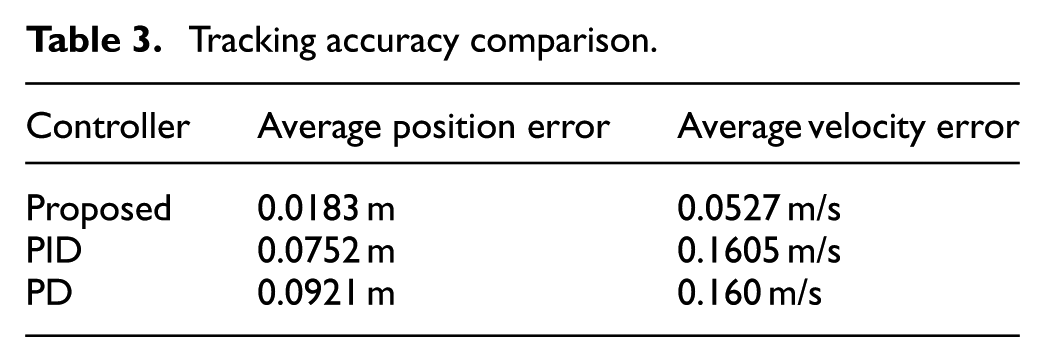
Figure 15 shows the real-world testing scenario. Figure 16 displays 3D operational trajectory diagrams of the mobile platform and end-effector derived from experimental data. It can be observed that the proposed method enables both the mobile platform and robotic arm to closely track their respective desired trajectories during actual operation. As show in Table 3, compared to conventional PID control, the proposed controller demonstrates significantly enhanced robustness, achieving a more than 75% reduction in position error and 60% lower velocity error. Figure 17 provides a 2D trajectory comparison for the MMR. Despite limitations in hardware resources leading to suboptimal tracking performance, the experimental results partially validate the advantages of the proposed algorithm.
Tracking accuracy comparison.
Conclusions
For the trajectory tracking control a predefined time-stabilized control strategy with full state constraints is proposed based on the ESNO for the MMR under external disturbances. Firstly, an ESN-based adaptive predefined time-convergent disturbance observer is proposed to approximate the external disturbance. Secondly, a controller with tracking position and velocity constraints is constructed based on an interval-based concept of the PPC. The introduction of a PTPPF and the design of the PPC with a simple form enable the tracking error and the transformation error of the PPC to be taken into account and converge within a predefined time. Thirdly, a predefined time convergence second order filter is proposed to solve the complexity explosion problem. Finally, through numerical simulations and comparative physical experiments, the proposed controller has demonstrated that the control architecture exhibits improvements in both dynamic response speed and steady-state tracking accuracy. However, three key limitations warrant attention: (1) The computational burden exhibits cubic scaling with degrees of freedom (DOF), limiting real-time implementation beyond 6-DOF systems. (2) Coordination of MMR introduces communication delays not currently addressed in our stability framework. (3) barrier function saturation may occur under extreme impact disturbances exceeding 15 Nm. To overcome these challenges, future research will develop lightweight ESN architectures via neuromorphic computing, design delay-robust consensus protocols for distributed multi-agent systems, and integrate impedance-controlled barrier functions for impact-resilient performance. These directions will extend the method’s applicability to complex industrial scenarios while preserving its predefined-time convergence guarantees.
Footnotes
Appendix 1
The candidate Lyapunov function is chosen as
In light of Lemma 3, the following inequalities
hold. Then, (33) can be rewritten as
where
and
where
Based on the Lemma 1, it is easy get that
Ethical considerations
This article does not contain any studies with human participants or animals performed by any of the authors.
Consent to participate
Not applicable.
Consent for publication
All authors have read and approved the final manuscript and consent to its publication.
Author contributions
Conceptualization, Guangping Wang and Zengkang Gan; Formal analysis, Zengkang Gan; Methodology,We icai Zhang; Supervision, Guangping Wang, Tao Gong and Wei Chen; Validation, Zhongchuan Ouyang, Junqi Zhang and Haoming Rong; Data visualization, Zhenghong Qi and Jiancheng Ji; Writing – original draft, Zhenghong Qi; Writing – review & editing, Zengkang Gan and Tao Gong. All a uthors read and approved the final manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.