This paper presents neural network (NN) event-triggered (ET) formation fault-tolerant control (FTC) problem for nonlinear multi-agent systems (MASs) with unmeasurable states, actuator faults and time-varying state delays. Firstly, a state observer is introduced to estimate the unmeasurable states and prescribed performance (PP) control based on error transformation is presented to maintain system efficiency and reliability. Secondly, to solve the unknown actuator faults, an adaptive law based on the projection opearator is designed and state time-delay is compenstated with an appropriate Lyapunov functional. Thirdly, the biggest innovation in the proposed control approach is that only when ET conditions are violated, the control law and NN weights are updated. Then, the developed control scheme can guarantee MASs are semi-globally uniformly ultimately bounded (SGUUB). Finally, comparative simulations are given to demonstrate the validity of the proposed method.
Over the past few years, multi-agent systems (MASs) have attracted much attention due to its broad applications in unmanned surface vehicle (USV), unmanned aerial vehicle (UAV), unmanned autonomous vehicle (UGV) and other fields.1–3 As a branch of MASs coordinate control, the purpose of formation tracking of MASs is to maintain a desired formation eventually. Thus, many interesting formation control problems are studied in Refs.4–6 For example, the problem of finite-time formation control for MASs with general linear dynamics is addressed in Refs.5,6 presents distance-based formation control with prescribed performance in which agents are subjected to unknown external disturbances.
In practical applications, it is difficult to acquire the full states of the system directly due to the restrictions of measuring equipments. To solve these problems, many scholars are committed to studying state estimation7–9 and Fuzzy/NN approximation.9–13 Among them, an adaptive NN formation FTC issue is considered for nonlinear MASs in Tong et al.,9 where unknown states are estimated by a nonlinear observer. By employing fuzzy logic systems, the unknown nonlinear dynamics and the state-dependent actuator faults are approximated.11 Moreover, communication delays are inevitable and may be a source of instability or poor performance of MASs, especially when the delay is unknown. Nevertheless, there are not many results in multiagent systems with time delay until in Refs.14–17 By utilizing the Lyapounov-Krasovskii functional (LKF) to solve state time-delay, the consensus problem is addressed for MASs in Xiao et al.14 In Liu et al.,15 Young’s inequality scaling technique is applied to handle the problem of time delay. In Lai and Chen16, a new sufficient condition of delay dependence for the mean square formation tracking is also proposed. However, the above control schemes all require that the control signals are frequently updated by the time-based sampling schemes, which will inevitably cause a tremendous waste of communication resources.
To reduce unnecessary communication resources, event-triggered control (ETC) is a nice choice without doubt since the controller performs an action only when the event threshold is exceeded. In Xu et al.18 dealed with the problem of event-triggered formation tracking in a fixed topology. In Ahmed et al.,19 the event-triggered consensus control was studied by utilizing a distributed ET estimator with the dynamic threshold mechanisms. In Wang and Li,20 the control law and NN weights are updated in an aperiodic form, which can reduce data transfer and communication resource. Unfortunately, ETC, which is studied in Refs.,18–20 is only designed in the controller-to-actuator (C-A) channel, and data transmissions from the sensor-to-controller (S-C) channel are not considered. Therefore, how to design a two-channel ET mechanism and address the formation control problem for MASs with unknown states are a challenging task.
Besides, actuator faults are also inevitable, which may damage system performance or result in the instability of system. Thus, it is essential to learn FTC methods to maintain control performance.11,13,21,22 For instance, Bounemeur and Chemachema11 presents an adaptive fuzzy fault-tolerant tracking control for a class of unknown multi-variable nonlinear systems. An active fuzzy fault tolerant tracking control (AFFTTC) scheme is developed to deal with four kinds of faults.13 However, these schemes are only suitable for single agent systems. In order to acheive more effective and accurate formation tasks for MASs, it is important to extend the FTC from single agent systems to MASs. In Liu et al.,23 the Takagi-Sugeno fuzzy system robust fault estimation and FTCare used to compensate the influence of actuator failure for MASs. In Wu et al.24 two effective distributed fault-tolerant formation tracking protocols are designed to get the desired formation space positions. The distributed adaptive FTC to solve non-identical matching functions for MASs is studied in Deng and Yang.25
On the other hand, formation control for nonlinear MASs is known to require high performance. Guaranteeing prescribed performance is critical to maintain system efficiency and reliability. In the work, Li et al.26 a distributed finite-time consensus controller is proposed to ensure the synchronization of multi-agent systems with specified performance. In the work, Liu et al.27 a data-driven control strategy is constructed to handle the problem of MASs. Therefore, it is reasonable to use the prescribed performance control to obtain more precise formation tracking tasks. However, how to develop NN formation fault-tolerant control strategies for nonlinear multi-agent systems with unknown states, actuator failure, time-varying state delays and the prescribed performance based on the double-sides ET mechanism are very intersting and difficult, which is the reason inspiring our research.
Motivated by these observations, an adaptive neural network event-triggered formation fault-tolerant control is designed with unmeasurable states, actuator failures, time-varying state delays in this article. Contributions can be summarized as follows.
The control schemes proposed in Gao et al.7 and Xu et al.18 cannot be applied to systems with unmeasurable states, while the state observer constructed in this paper overcomes the limitation that all states must be measurable. Meanwhile, actuator faults and time-varying state delays are also taken into consideration. Therefore, the control strategy proposed in this paper is more applicable to practical scenarios;
Compared with the single channel ET mechanism in Refs.18–20, a two-channel ET mechanism is proposed to reduce the communication burden in this paper. Moreover, by utilizing the dynamic surface control technique and redesigning virtual controllers and controller, the developed FTC method overcomes the virtual controller nondifferentiability problem by using backstepping control theory;
Unlike the results in Refs.14,28–30, the system stability is guaranteed without prescribed performance. In this paper, the proposed NN event-triggered formation fault-tolerant control method not only ensures the stability of the systems, but also guarantees that the formation control errors are limited within preset boundaries.
Problem statement
Problem formulation of the system
Consider the nonlinear multi-agent systems issue of followers. Follower can be presented as
where represents the state. and represent input and output of the system, respectively. denotes the unknown smooth nonlinear function and denotes the time-delay function. Moreover, we assume that only can be measured.
In light of Tong et al.9 and Zhang and Tong,31 the loss of effectiveness faults and bias faults are modeled as:
where represents the time-varying effectiveness factor of the actuator for th agent and its first-order derivative is bounded such that , denotes an unknown time-varying bounded function with . From (2), it means that the actuator of th agent may suffer the loss of effectiveness fault and bias fault.
According to system (1), we can define as the output of the leader.6 Thus, we define formation control error as
where and represent neighbor’s signal and the assigned formation variable, respectively.
The control objective of this work is to design a NN event-triggered formation fault-tolerant control scheme for MASs to ensure that:
(1) In the presence of unmeasurable states, actuator faults, and time-varying delays, all signals of the controlled MASs are semi-globally uniformly ultimately bounded (SGUUB).
(2) followers can follow a leader’s signal and maintain a desired formation form.
Communication graph
In the networked MASs, for follower agents encoded from 1 to N, we use a directed graph to present their communication relationship, where , and are called the node set, the edge set and the weight matrix, respectively. The is equivalent to that agent can obtain the information from . So, a neighbor set can be represented as , namely, when , , and when or , . We assume that and the graph is fixed in this paper. represents the laplacian matrix. is represented as the in-degree matrix of agent with . It is important to note that at least one follower can accept a message from a leader.
Radial basis function NNs
RBFNNs can be utilized to approximate any smooth functions as Xiao et al.14 and Liu et al.27
where stands for the approximation error, satisfying , . denotes the ideal weight vector, is the number of neurons. is the neural network basis function, represented by the Gaussian function. . Among them, and represent the width of the Gaussian function and the center of the receptive field, respectively.
To make the control design process more complete and compact, the following assumption and lemma are given.
Assumption 1 (Yoo32). The reference trajectory vector is continuous and available, where , and is a known positive constant.
Assumption 2 (Wang et al.33). At least one follower can access the reference trajectory directly or through a communication graph.
Assumption 3 (Li and Tong34). For a nonlinear function , there are bounded functions and such that
where is the tracking error and is a positive constant.
Lemma 1 (Xiao et al.14). For any variable and constant satisfying , a set is defined suchthat . Then, the inequality is satisfied for .
Remark 1. Assumption 1 addresses that the reference tracking signal and its first and second derivative are bounded, which is a necessary condition for the MASs tracking in DSC. This ensures that the formation tracking errors remain controllable and avoid unbounded control inputs. Assumption 2 ensures that the formation tracking error (3) is well-defined. The requirement for leader-follower connectivity is a common topological constraint in MASs to ensure controllability. Assumption 3 provides the restriction on delay functions. It is obvious to extend the assumption to address the time-delay problem for MASs, where the tracking error is further considered as formation error .
Prescribed performance
In this section, to improve the capability of nonlinear systems, the error transformation within a prescribed performance function in Li et al.26 and Liu et al.27 can astrict the range of system formation tracking errors , . Thereby, we define error transformation function as follows:
where is the formation tracking error, and . The function : , , is an increasing smooth function and is the transformed signal. So we have
so
and
where , and . So the prescribed performance can be described as
State observer design
Rewrite system (1) as the following form:
where, , , and , , .
Since in (5) is unknown, a RBFNN is used to approximate , then we have
where is the approximation error with , and is an unknown constant.
Choose appropriate vector so that matrix is Hurwitz. Choose a symmetric matrix to satisfy the following formula
To reduce the data transmission, an ET mechanism is constructed in the sensor-to-observer channel as follows:
Taking into account the output of each follwer is triggered, the NN stste observer is constructed as
where .
Remark 2. It is worth noting that the NN or fuzzy state observer designs in Refs.18–20 are only using the output instead of triggered output . While the state observer (8) designed in this paper utilizes triggered output . Therefore, the proposed state observer (8) has advantages in estimating the unmeasurable states, unknown actuator effectiveness factor and reducing the unnecessary data transmissions in the S-C channel simultaneously.
Remark 3. The triggered output is not continuous, if the backstepping control design18–20 is adopted directly, the nondifferentiable problem of virtual controllers will happen. Thus, the control design of this paper is more difficult than Refs.18–20 In this work, by utilizing the dynamic surface control technique (32) and redesigning virtual controllers (29), (36), (39) and (44), the developed FTC method overcomes the virtual controller nondifferentiability problem by using backstepping control theory.
The observer error is defined as . From (5) and (8), we consider the observer error dynamic as
where , and .
To verify the validity of the designed state observer, we construct Lyapounov-Krasovskii candidate functional as
where
where ,
, and is a constant.
By using , we get
where and . According to Assumption 3, we have
To fully design the , and we consider the state observer error as
where and .
Thus, we can obtain
The adaptive law can be designed as
where is a constant. The operator is designed as
Because of the definition in Yoo,32 the is always ensure. So, utilizing Young’s inequality, one gets
From (11) to (19), the derivative of is
where , , and .
Controller design
In this section, we utilize a recurisve backstepping-based dynamic surface control (DSC) to design formation fault-tolerant controller. The specific steps are as follows.
Step 1. In light of (4), the derivatives of is written as
Meanwhile, according to (3), we get
where,
Define nonlinear function as and by using a RBFNN to approximate it, then we have
where , .
Putting (23) into (22) and we get
The Lyapunov-Krasovskii candidate functional is considered as
Where
where , , and are positive constants.
In light of the derivative of , the virtual control law and adaptive laws are constructed as follows:
Step k (). To solve the problem of “explosion of complexity,” we use DSC technique.
where represents the error surface. is a new variable, which satisfies the following first-order filter
In view of the designed observer (5) and (32), one can get
The Lyapunov candidate function is considered as:
where is a parameter to be designed.
According to (7), the ET virtual control law is reconstructed as
and the adaptive law is constructed as follows:
Step. Similar to Step , we have
The ET mechanism in the controller-to-actuator channel is designed as
where , and are design parameters.
From (40), we have
where is a parameter and is similar to the definition in Tong et al.9
From (2) and (40), one has
Consider the Lyapunov candidate function as follows:
according to (7), (39) and (40), the ET virtual control law is reconstructed as
and the adaptive law is constructed as follows:
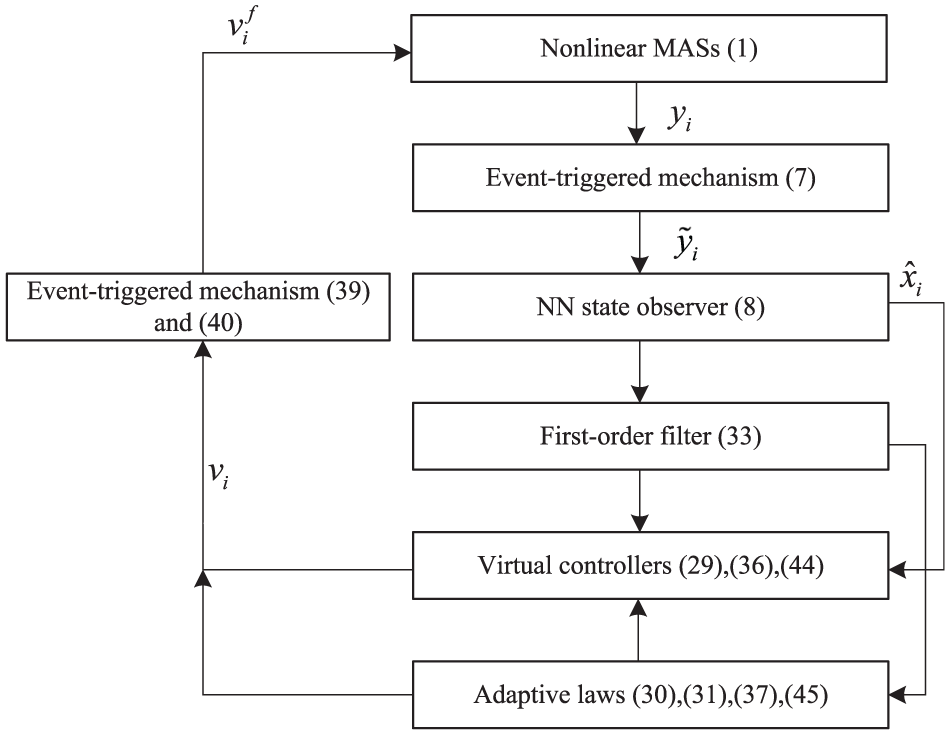
The designed FTC control algorithm can be seen in Figure 1
The designed FTC control algorithm.
Stability analysis
In the section, we give a detailed proof that the proposed control algorithm can ensure the stability of nonlinear MASs (1). The proof process is described as follow.
Theorem 1. Taking into account the nonlinear multi-agent systems (1) under Assumption 1-3. If the observer (8), the virtual controllers (29), (36) and (44), NN weight adaptive laws (30), (31), (37) and (45) are adopted. The proposed NN event-triggered formation fault-tolerant control algorithm can ensure the following three conclusions:
(1) All signals are SGUUB;
(2) All agents can maintain a desired formation form;
(3) Zeno phenomenon caused by the ET mechanism can be avoided.
Proof. To make the explanation clearer, we divide the proof process into the following three parts.
First, according to Lyapunov stability theory, Lyapunov-Krasovskii functional is selected as all followers
according to the time derivative , under Young’s inequality, one gets
According to Assumption 3, it can be obtained that
where,
Combining RBFNNs with Young’s inequality, we have
where is the approximation error.
In light of , substituting (46)–(51) into the derivative of results in
where .
Then, utilizing Young’s inequality, we have
Substituting (53)–(56) into the derivative of results in
where .
Similarly, one can obtain
In light of (42) and according to , (, ), we have:
Utilizing Young’s inequality, we can get:
Thus, substituting (58)–(65) into the derivative of results in
where .
Finally, from (52), (57) and (66), one has
where , and , we choose the parameter as and , , .
Thus, one obtains
and will become positive constants by adjusting constantly relevant parameters. However, in (68) can be positive or it can be negative, which depends on the size of . Therefore, it is necessary to consider the following two situations.
According to Lemma 1, we can get
where , for , and where , for .
Solving (69), we get
From (10), (46) and (70), we get , , , , , and are bounded. According to Lemma 1, it shows that is bounded. Since and are bounded, and are bounded. is a function of and , thus, and are also bounded. Therefore, conclusion (1) has been proven.
Second, we define . Then we can get and converge to
Remark 4. Note that the parameter selections are only sufficient conditions to guarantee the stability of the controlled system. However, from (67) and (71), it is clearly that tracking errors are related to , and . The tracking errors can be adjusted to be small parameter , but the large parameters and . Therefore, we can make tracking error be smaller, and thus the conclusion (2) is proven.
Third, we define , and , where , and are positive constants. Let for , for and . for . Besides, from (70), it follows , and are bounded. Then, there are , and satisfy , and . Then, the time derivative of , and are as follows:
According to (7), (39) and (40), event occurs when , and . After integrating both sides of formula (72) with respect to , and , we have
Further simplification of (73) can be obtained
Obviously, , and have positive lower bound. Therefore, zeno phenomenon can be successfully excluded. As far, the proof of Theorem 1 has been completed.
Simulation results
The validity of the proposed formation control algorithm can be illustrated by the example below.
The is described as . The functions are selected as , .
The parameters are designed as follows: , , , , , , , , , . , , , , .
The initial state can be defined as , , , , , , , =1, 2, 3, 4, =1, 2. .
To demonstrate, the intermittent fault is described as follows:
The following two cases are employed to validate the effectiveness of the method proposed in this paper.
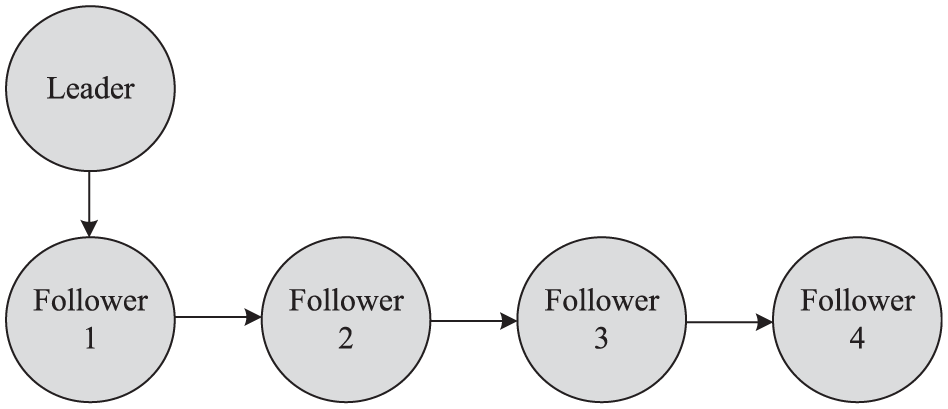
Case 1 (Chain Topology with Intermittent Faults) In this case, a linear chain topology is implemented where agents connect sequentially. The connectivity graph is shown in Figure 2.
Communication topology.
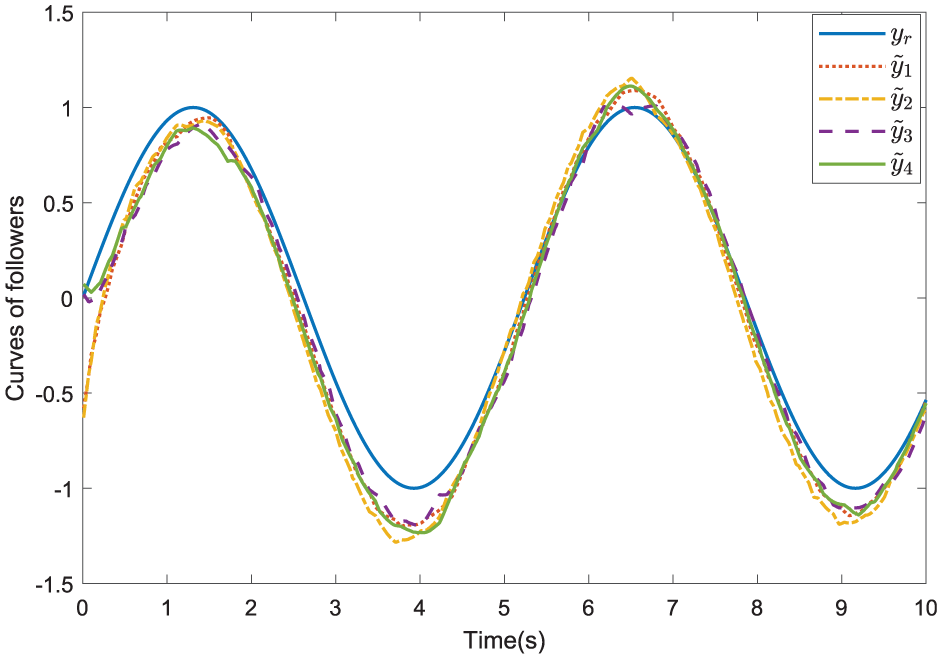
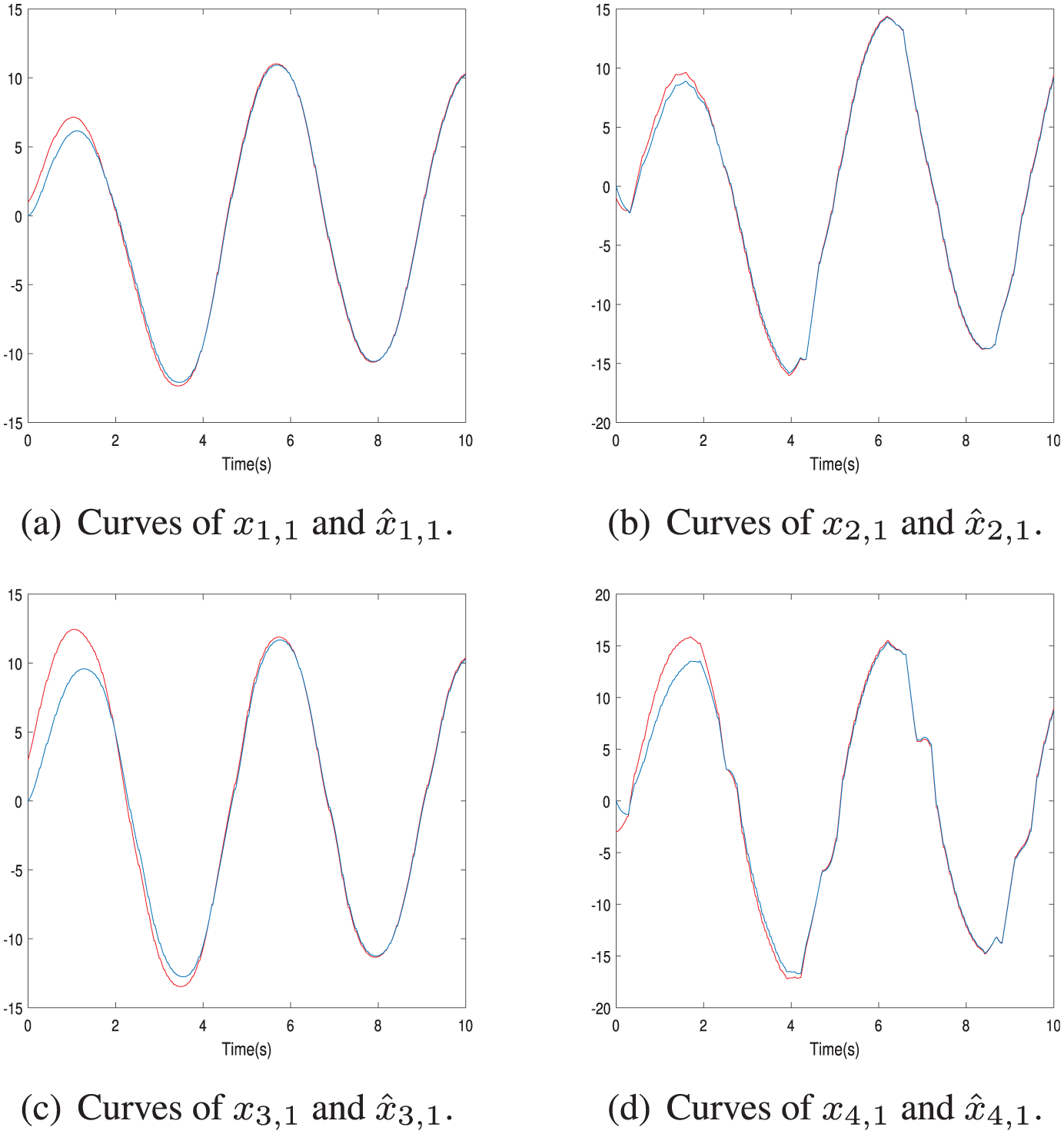
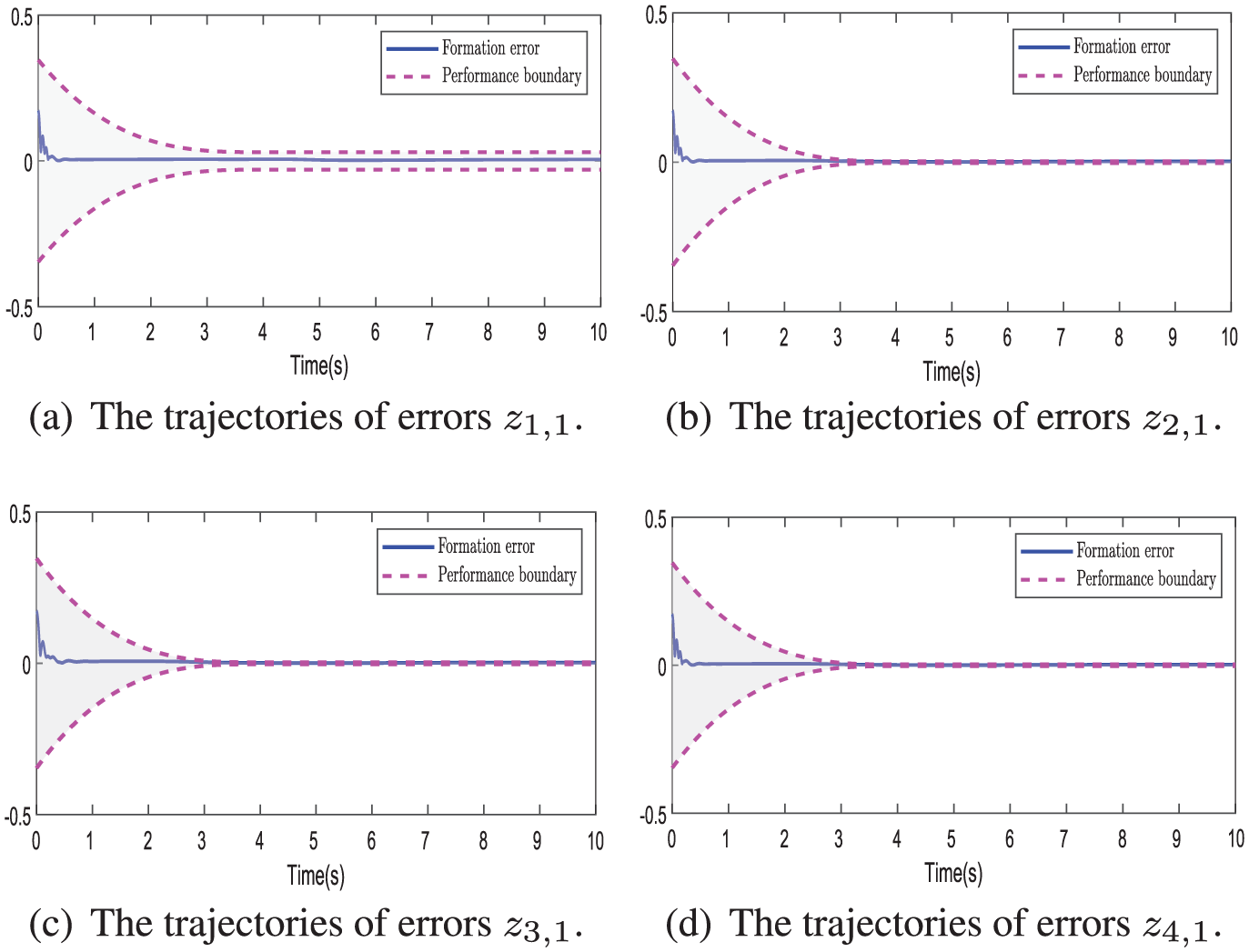
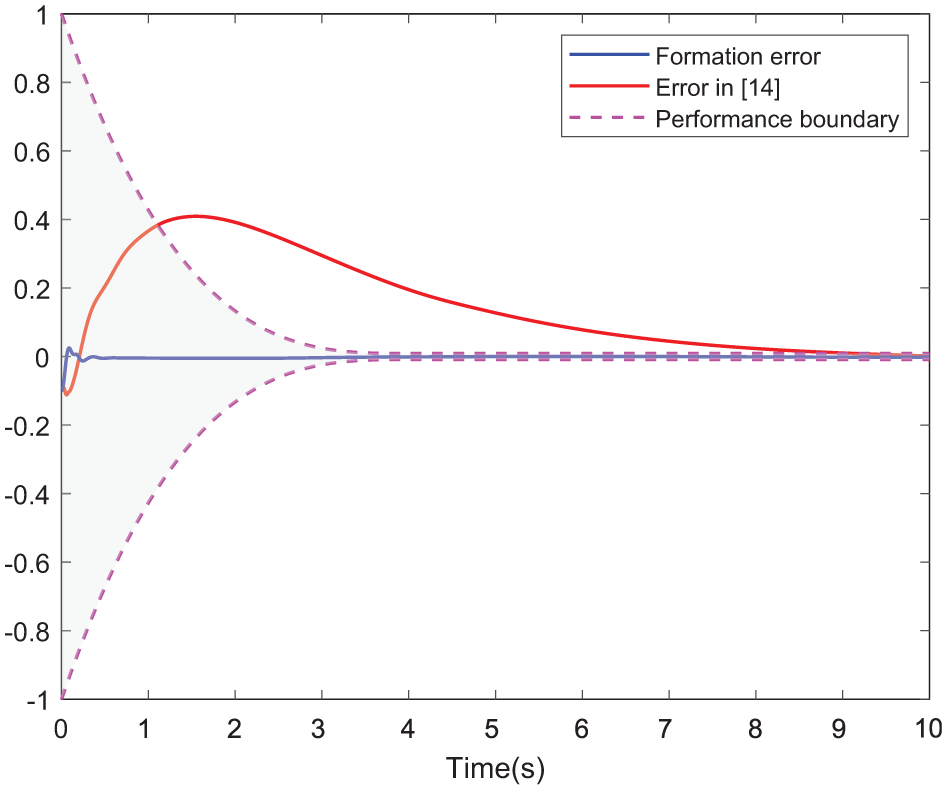
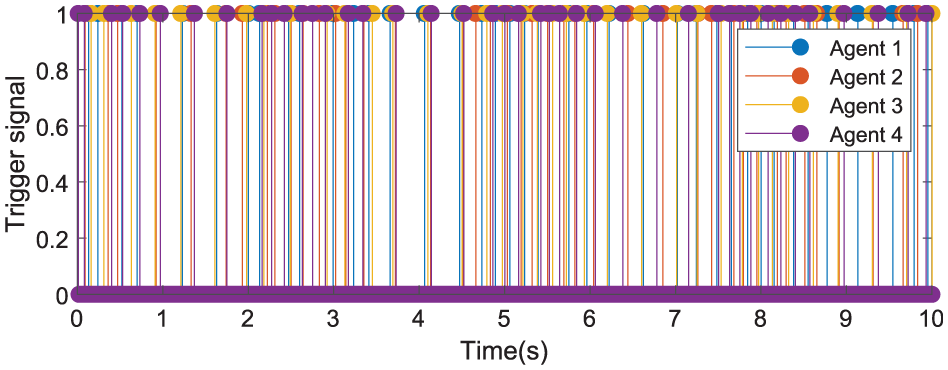
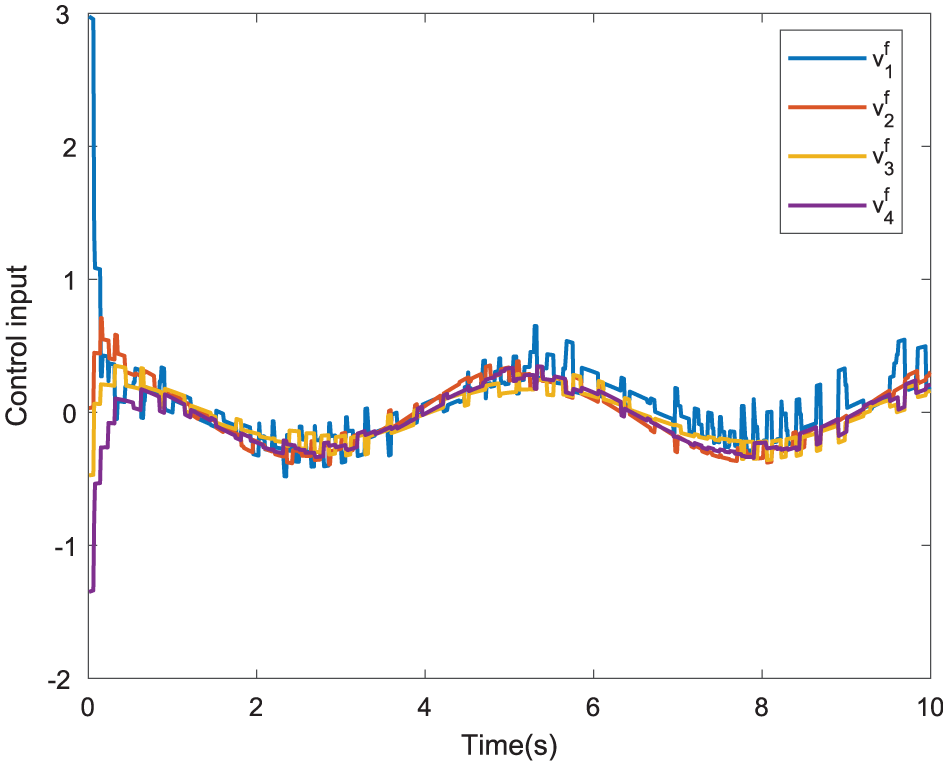
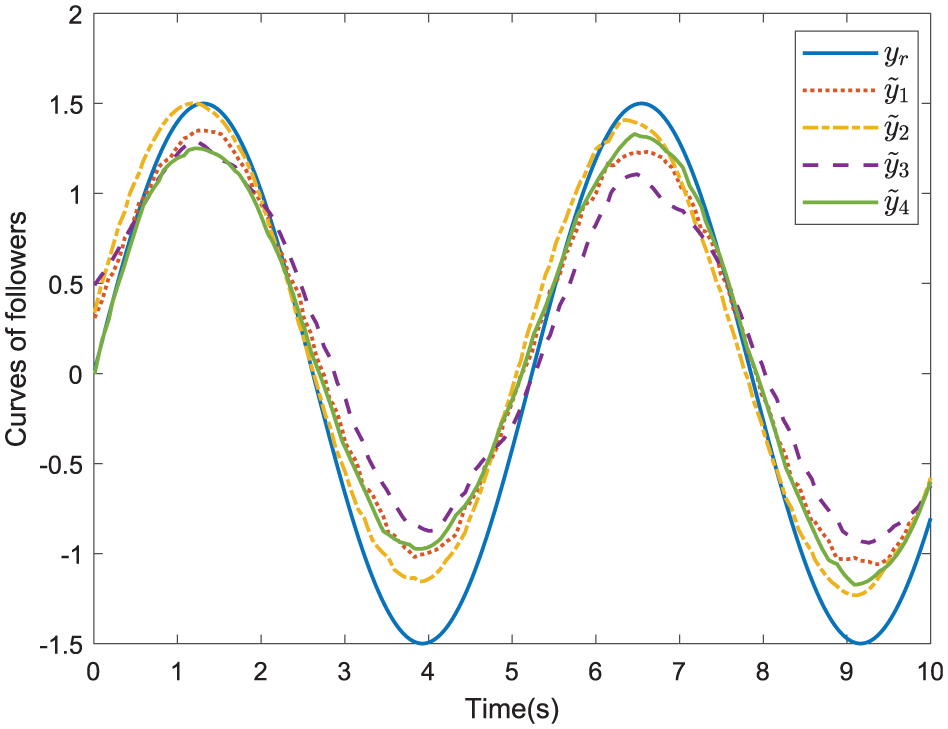
The simulation results are presented in Figures 3 to 9. Figure 3 shows the curves of followers, illustrating that the proposed algorithm achieves the formation control objective. The unmeasurable states estimated by the observer are shown in Figure 4, it is easy to show that the designed observer is effective. Figure 5 shows that the formation tracking errors decay within the PP bounds. Figure 6 indicates that the formation error of the proposed method remains constrained within PP bounds, whereas the approach in Xiao et al.14 violates these bounds and exhibits inferior stability. The triggering times of and are shown in Figures 7 and 8. Figure 9 shows that the proposed FTC can keep the system stable even after the intermittent faults occur.
Case 2 (Ring Topology with Intermittent Faults) In this case, a ring topology connects all agents symmetrically.
Curves of followers for case 1.
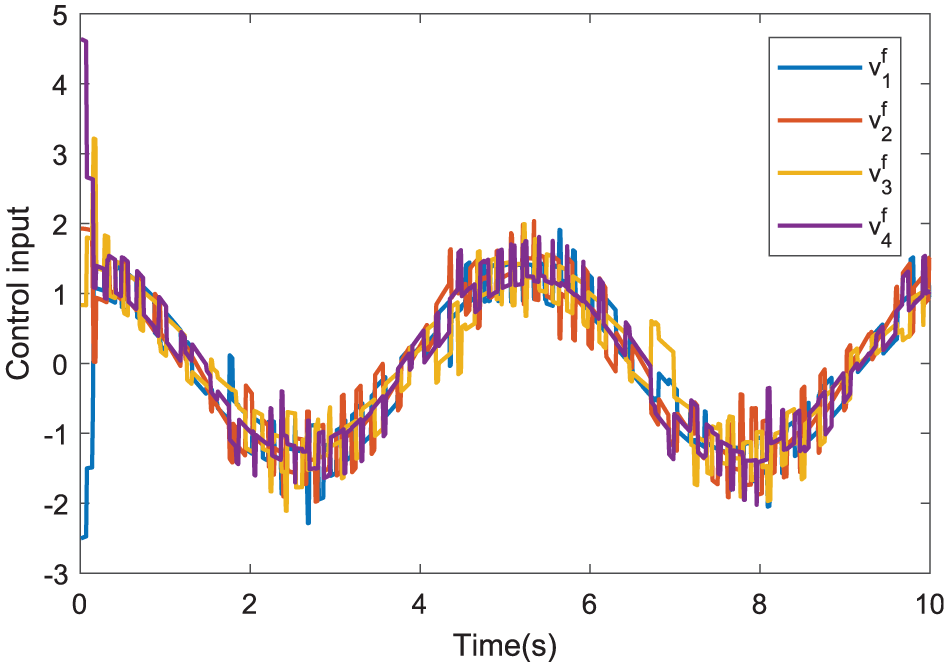
Curves of and , = 1,2,3,4: (a) curves of and , (b) curves of and , (c) curves of and , and (d) curves of and .
The trajectories of errors , = 1,2,3,4: (a) the trajectories of errors , (b) the trajectories of errors , (c) the trajectories of errors , and (d) the trajectories of errors .
Comparison results in formation tracking error.
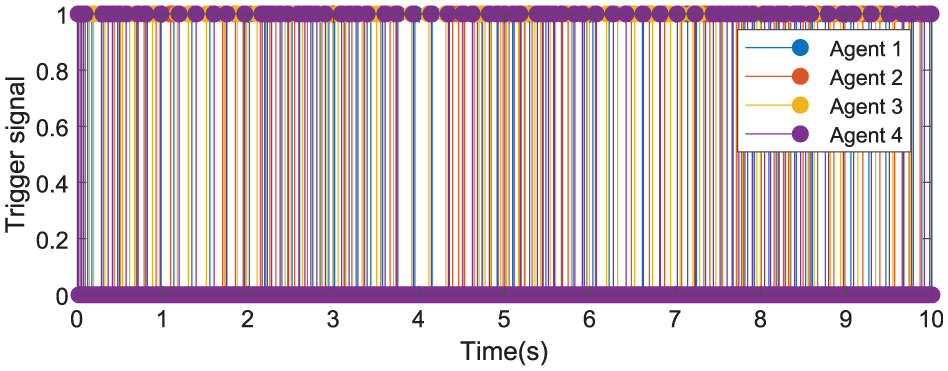
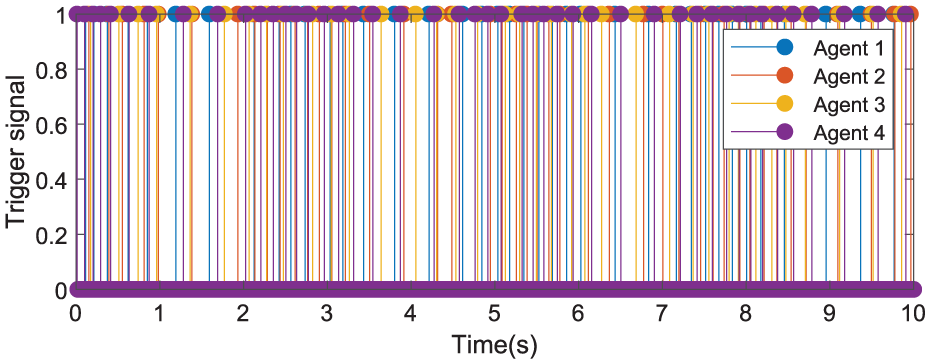
Triggering times of for case 1, = 1,2,3,4.
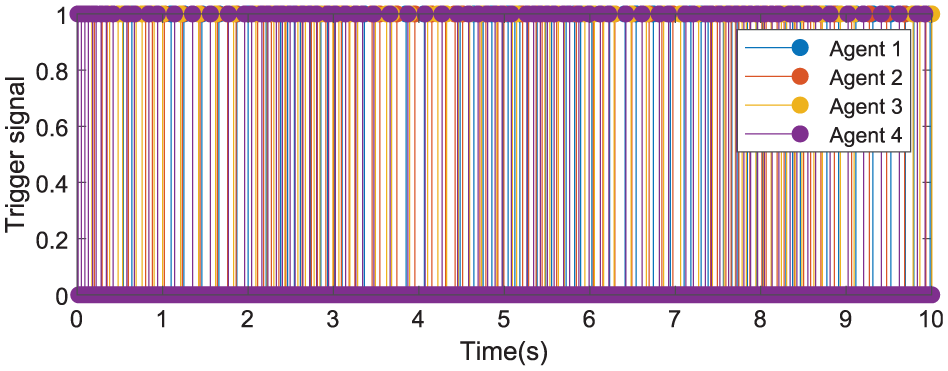
Triggering times of for case 1, = 1,2,3,4.
Trajectories of for case 1, = 1,2,3,4.
Compared with Figure 3, the tracking curve in Figure 10 fluctuates more relative to the reference curve, indicating poor tracking performance. Figures 11 and 12 result in greater wastage of communication resources to some extent compared to that in Figures 7 and 8. Figure 13 suggests that its fault tolerance performance may not be as effective as that shown in Figure 9 when the intermittent faults occur.
Curves of followers for case 2.
Triggering times of for case 2, = 1,2,3,4.
Triggering times of for case 2, = 1,2,3,4.
Trajectories of for case 2, = 1,2,3,4.
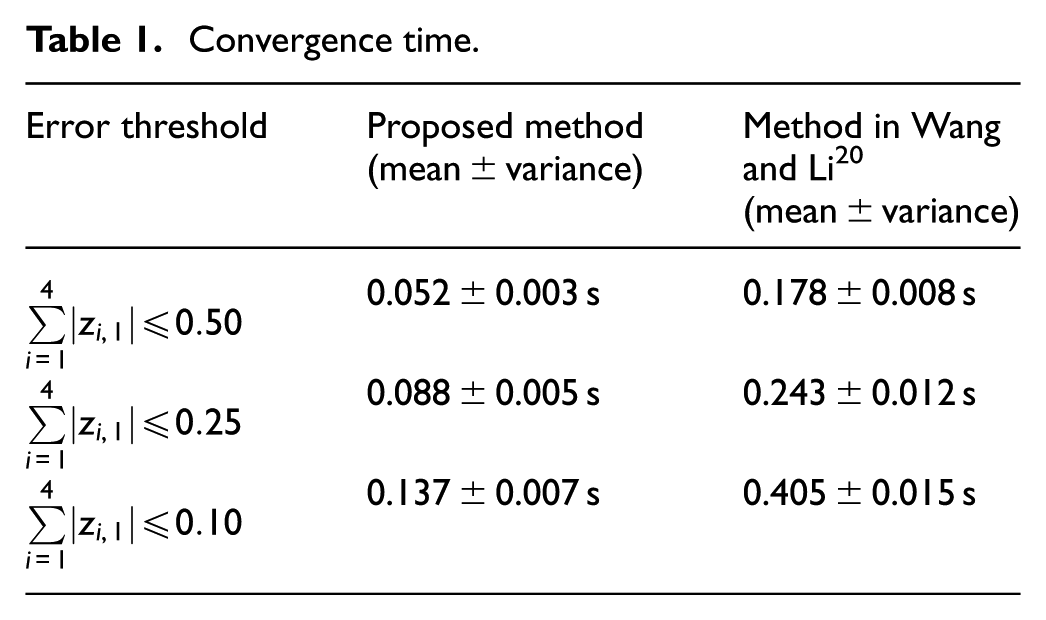
To demonstrate that the proposed scheme can decrease the convergence time of the formation tracking error, we compared with the control scheme in Wang and Li.20 The original Table 1 in Wang and Li20 presented convergence times from a single simulation run. Now, we have conducted 10 additional independent simulation trials under identical conditions. Table 1 now includes the mean ± variance deviation of convergence times for both our proposed method and the method from Wang and Li.20 From Table 1, we can know that the proposed method consistently achieves faster convergence with smaller variances, demonstrating its superior stability compared to method in Wang and Li.20
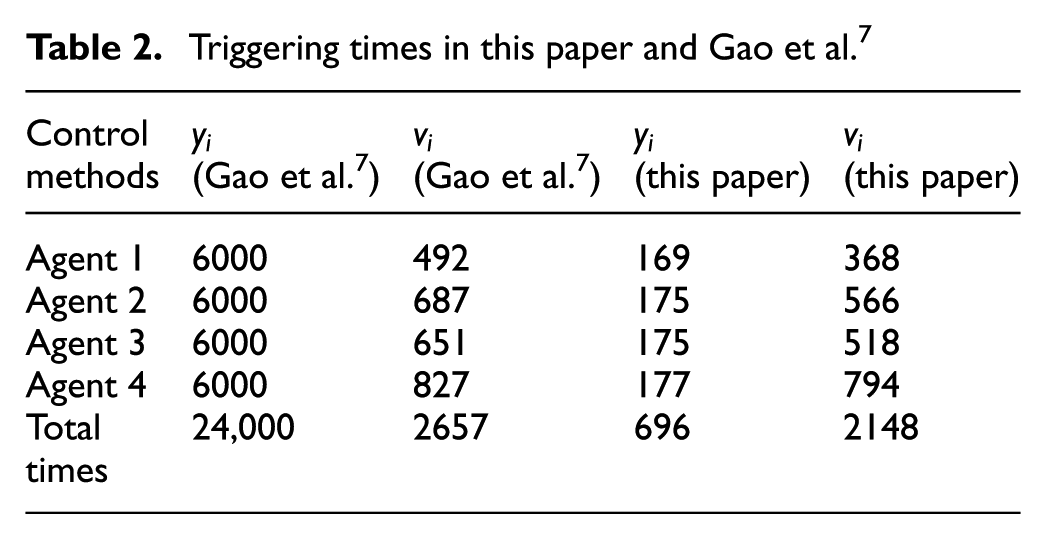
Moreover, to further proof the superiority of the double-sides ET mechanism, the single channel event-triggered control method in Gao et al.7 is proposed. The results are exhibited in Table 2. According to Table 2, we get control method in this paper can abundantly decrease the unnecessary data updates.
In this note, NN event-triggered formation fault-tolerant control is designed with the unmeasurable states, actuator faults and time-varying state delays. The nonlinear observer and NNs have been introduced to estimate the unmeasurable states by using the triggered output signal and approximate the unknown dynamic, respectively. Time-varying state delays have been solved by using appropriate LKF. In addition, DSC technique and backstepping control theory have been utilized to avoid the problem of “explosion of complexity.” The proposed control method not only ensures the stability of the system but also guarantees that the formation control errors are limited within preset bounds. In the future, there remain several issues to be investigated, for example, how to use the methods to MASs with interactive multi-model and complex input nonlinearities.
Footnotes
ORCID iD
Hua Chen
Ethical considerations
Ethical approval was obtained for this study.
Consent to participate
All researchers concur with the principles of informed consent.
Consent for publication
All authors (Haowen Zheng, Yao Tang, Hua Chen, Shengjie Yang) have read and approved the final version of the manuscript, and consent to its publication in 〈〈Measurement and Control〉〉. No part of the manuscript has been published or submitted for publication elsewhere in whole or in part.
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The datasets generated and supporting the findings of this article are obtainable from the corresponding author upon reasonable request.
Trial registration number/date
MAC-24-0395
References
1.
PuHYWangJGaoS.A velocity-domain mappo approach for perimeter defensive confrontation by USV groups. Expert Syst Appl2025; 265: 125980.
2.
AntonioVAdrienG.Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles. J Syst Eng Electron2021; 32(5): 1014–1022.
WenGChenC.Formation control with obstacle avoidance of second-order multi-agent systems under directed communication topology. Sci China2019; 62(9): P144–P157.
5.
LiuYGengZ.Prescribed performance distance-based formation control of multi-agent systems. Syst Control Lett2015; 85: 54–60.
6.
RamezaniMAtashgahM.Prescribed performance distance-based formation control of multi-agent systems. Automatica2020; 119(109086): 1–10.
7.
GaoLYaoDLiH, et al. Fuzzy-based dynamic event triggering formation control for nonstrict-feedback nonlinear mass. Fuzzy Sets Syst2022; 452: 1–22.
8.
HuJWuYSunX, et al. Adaptive output feedback formation tracking for a class of multiagent systems with quantized input signals. Front Inf Technol Electron Eng2018; 19(009): 1086–1097.
9.
TongSZhouHLiY.Neural network event-triggered formation fault-tolerant control for nonlinear multiagent systems with actuator faults. IEEE Trans Syst Man Cybern Syst2023; 53(12): 7571–7582.
10.
ZhangDHHaoXLiangL, et al. A novel deep convolutional neural network algorithm for surface defect detection. J Comput Design Eng2022; 9(5): 1616–1632.
11.
BounemeurAChemachemaM.Adaptive fuzzy fault-tolerant control using nussbaum-type function with state-dependent actuator failures. Neural Comput Appl2021; 33(1): 191–208.
12.
QinCBQiaoCWangX, et al. Barrier-critic adaptive robust control of nonzero-sum differential games for uncertain nonlinear systems with state constraints. IEEE Trans Syst Man Cybern Syst2024; 54(1): 50–63.
13.
BounemeurAChemachemaMEssounbouliN.Indirect adaptive fuzzy fault-tolerant tracking control for mimo nonlinear systems with actuator and sensor failures. ISA Trans2018; 79: 45–61.
14.
XiaoWBCaoLLiH, et al. Observer-based adaptive consensus control for nonlinear multi-agent systems with time-delay. Sci China Inf Sci2020; 63(3): 132202.
15.
LiuXYanMYangP, et al. Adaptive consensus control for a class of nonlinear multi-agent systems with unknown time delays and external disturbances. Trans Inst Meas Control2020; 44(10): 2063–2075.
16.
LaiJChenS.Formation tracking for nonlinear multi-agent systems with delays and noise disturbance. Asian J Control2015; 17(3): 879–891.
17.
FengLHuangBSunJ, et al. Multi-stage dynamic event-triggered containment control of nonlinear multi-agent systems with input-bounded leaders and time-varying delay. Int J Robust Nonlin Control2023; 33(1): 574–591.
18.
XuZXieNShenH, et al. Event-triggered formation tracking control of nonholonomic mobile robots without velocity measurements. Automatica2020; 112(108671): 345–358.
19.
AhmedIRehanMIqbalN.A novel exponential approach for dynamic event-triggered leaderless consensus of nonlinear multi-agent systems over directed graphs. IEEE Trans Circuits Syst II Express Briefs2021; 69(3): 1782–1786.
20.
WangWLiY.Observer-based event-triggered adaptive fuzzy control for leader-following consensus of nonlinear strict-feedback systems. IEEE Trans Cybern2021; 51(4): 2131–2141.
21.
BounemeurAChemachemaM.Finite-time output-feedback fault tolerant adaptive fuzzy control framework for a class of mimo saturated nonlinear systems. Int J Syst Sci2024; 56(4): 733–752.
22.
ZhangDHWangYMengL, et al. Adaptive critic design for safety-optimal ftc of unknown nonlinear systems with asymmetric constrained-input. ISA Trans2024; 155: 1–10.
23.
LiuXGaoZZhangA.Observer-based fault estimation and tolerant control for stochastic Takagi–Sugeno fuzzy systems with Brownian parameter perturbations. Automatica2019; 102(C): 137–149.
24.
WuYLiJLiuL, et al. Distributed adaptive practical formation tracking for multi-agent systems with actuator faults. Int J Robust Nonlin Control2020; 33(3): 1.
25.
DengCYangG.Distributed adaptive fault-tolerant containment control for a class of multi-agent systems with non-identical matching non-linear functions. IET Control Theory Appl2016; 10(3): 273–281.
26.
LiXLuoXWangJ, et al. Finite-time consensus of nonlinear multi-agent system with prescribed performance. Nonlin Dyn2018; 91(4): 2397–2409.
27.
LiuDZhouZLiT.Data-driven bipartite consensus tracking for nonlinear multiagent systems with prescribed performance. IEEE Trans Syst Man Cybern Syst2023; 53(6): 3666–3674.
28.
YanBShiPLimC.Robust formation control for nonlinear heterogeneous multiagent systems based on adaptive event-triggered strategy. IEEE Trans Autom Sci Eng2022; 19(4): 2788–2800.
29.
YanBShiPLimC.Optimal robust formation control for heterogeneous multi-agent systems based on reinforcement learning. Int J Robust Nonlin Control2022; 32(5): 2683–2704.
30.
DuanZWeiAZhangX, et al. Observer-based formation tracking control for feedforward nonlinear multi-agent systems with dead-zone input. Int J Syst Sci2022; 53(15): 3215–3225.
31.
ZhangJTongS.Event-triggered fuzzy adaptive output feedback containment fault-tolerant control for nonlinear multi-agent systems against actuator faults. Eur J Control2024; 75: 100887.
32.
YooS.Distributed consensus tracking for multiple uncertain nonlinear strict-feedback systems under a directed graph. IEEE Trans Neural Netw Learn Syst2013; 24(4): 666–672.
33.
WangHQLiuXShiP.Multi-stage dynamic event-triggered containment control of nonlinear multi-agent systems with input-bounded leaders and time-varying delay. Int J Robust Nonlin Control2023; 33(1): 574–591.
34.
LiKWTongS.Fuzzy adaptive practical finite-time control for time delays nonlinear systems. Int J Fuzzy Syst2019; 21(4): 1013–1025.